



Autonomous Satellite Wildfire Detection Using Hyperspectral Imagery and Neural Networks: A Case Study on Australian Wildfire

 ,
,  ,
,  ,
,  , ,
, ,
Abstract
:1. Introduction
- A one-dimensional (1D) CNN for detecting wildfires using PRISMA hyperspectral imagery was considered, and promising results are shown for the edge implementation on three different hardware accelerators (i.e., computer hardware designed to perform specific functions more efficiently when compared to software running on a general-purpose central processing unit).
- We demonstrate that AI-on-the-edge paradigms are feasible for future mission concepts using appropriate CNN architectures and mature astrionics technologies to perform time- and power-efficient inferences.
2. Current Detection Methods
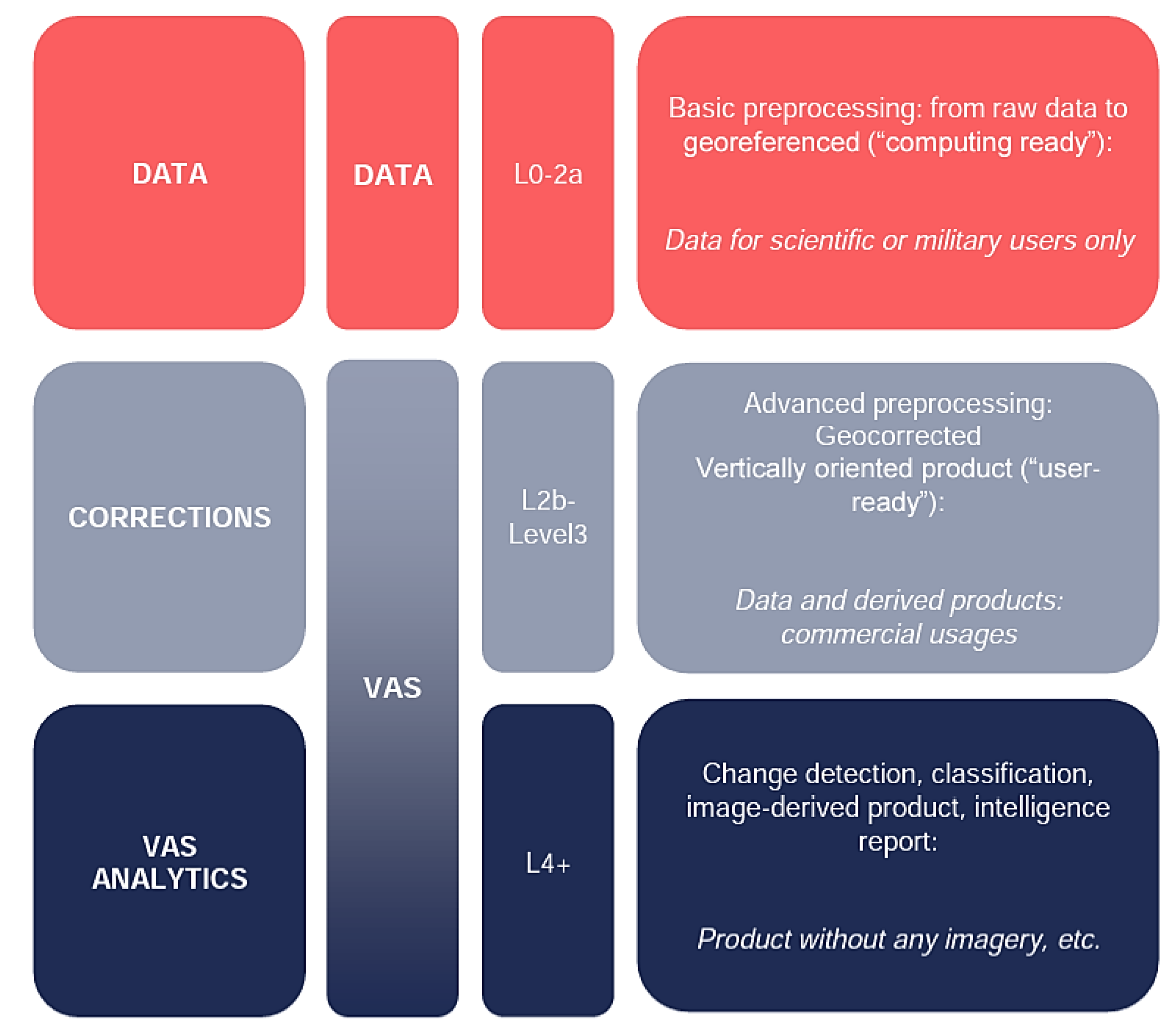
3. PRISMA Mission
- Level 1, radiometrically corrected and calibrated top of atmosphere (TOA) data.
- Level 2B, Geolocated at-ground spectral radiance product.
- Level 2C, Geolocated at-surface reflectance product.
- Level 2D, Geocoded version of the Level 2C product.
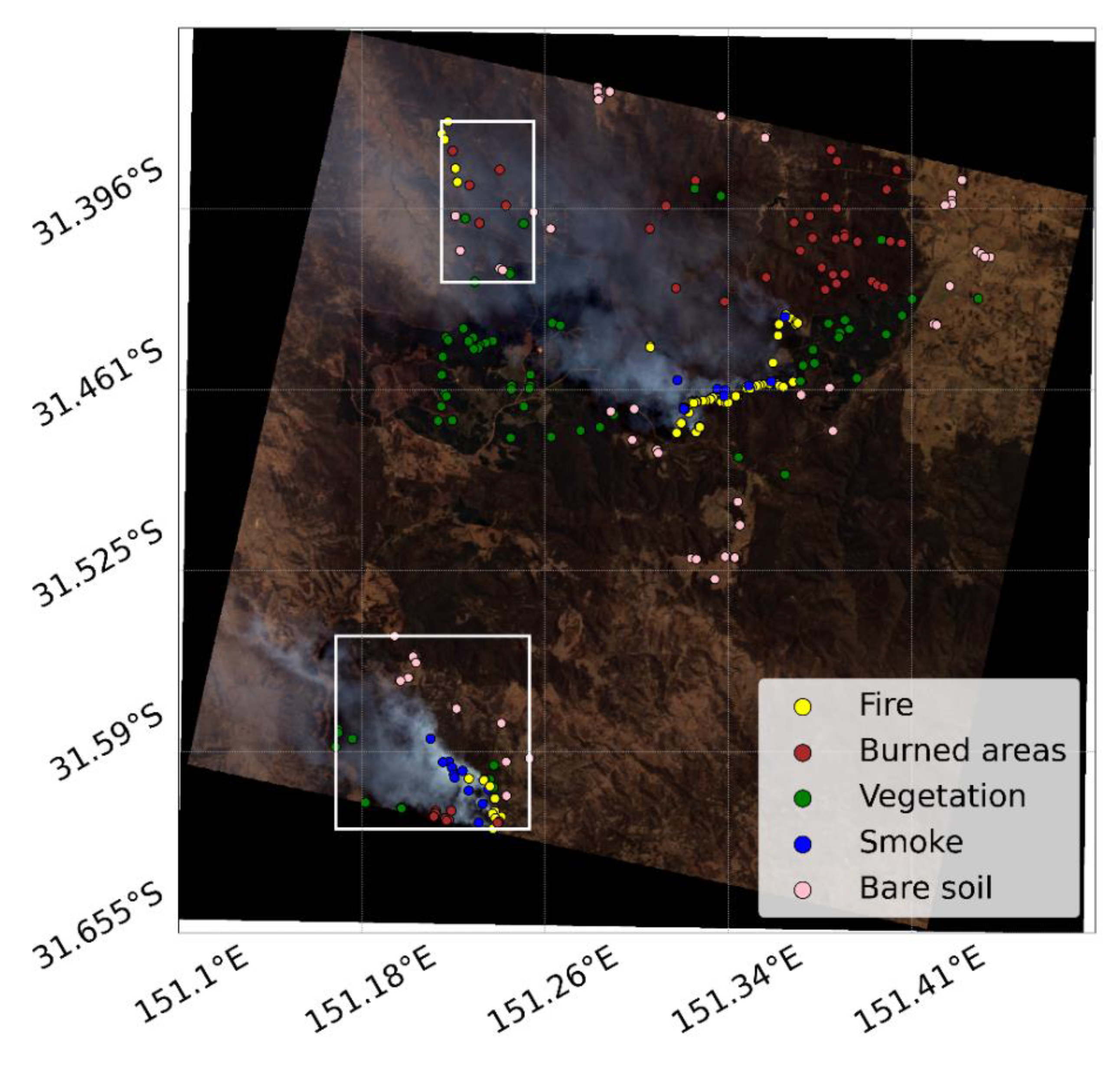
3.1. Dataset Definition
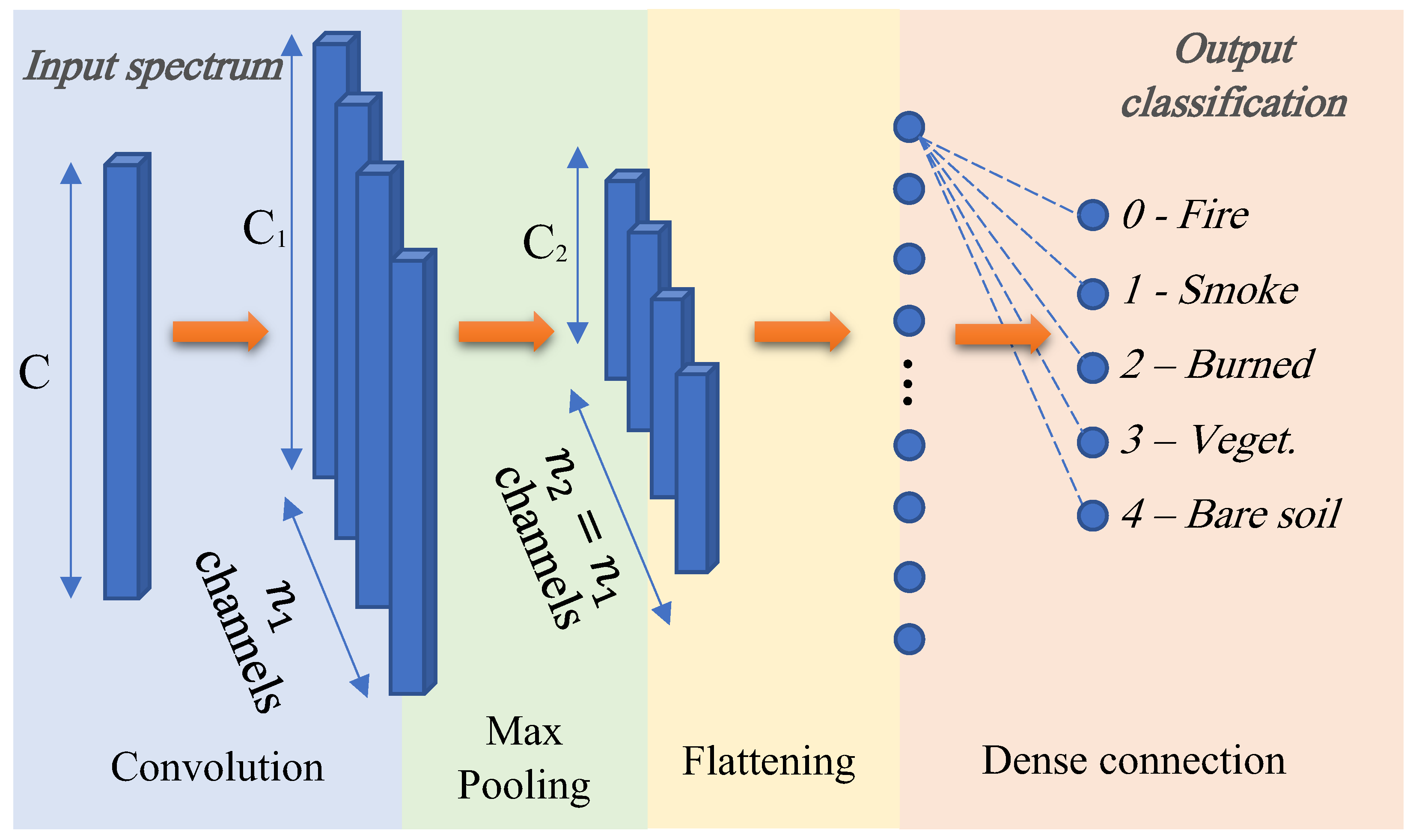
3.2. Automatic Classification with a 1D CNN Approach
4. Astrionics Implementation
4.1. Description of the hardware accelerators
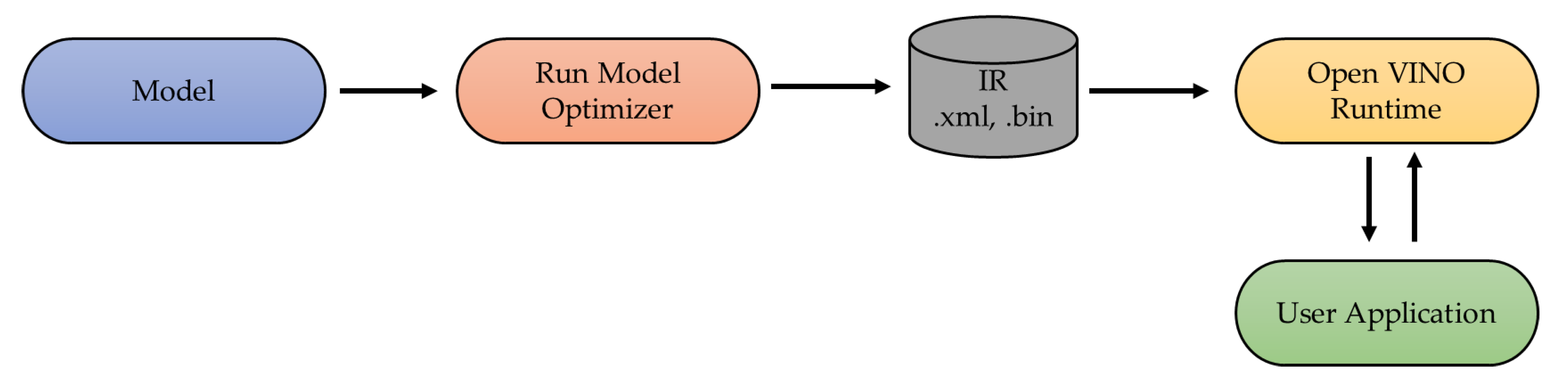
4.2. Movidius Stick
- Supporting CNN profiling, prototyping and tuning workflow;
- Real-time on-device inference (Cloud connectivity not required);
- Features the Movidius Vision Processing Unit with energy-efficient CNN processing;
- All data and power provided over a single USB type-A port;
- Run multiple devices on the same platform to scale performance.
4.3. Jetson Nano
4.4. Jetson TX2
5. Results
- Results on the Movidius: The results of the deployment on the Movidius indicate that the accuracy did not vary in comparison to the values that were presented in Table 9. At the same time, the inference time was approximately 5.8 milliseconds, and the computing power was 1.4 watts on average.
- Results on the Jetson TX2: The results of the deployment on the Jetson TX2 revealed that the accuracy did not change in comparison to the values that were reported in Table 9. On the other hand, the inference time was approximately 3.0 milliseconds, and the computational power was 4.8 W on average (2.1 W if considering the power consumed by the GPU only). It is important to note that these results are related to the TX2 setup that provided the least inference time and the maximum power consumption. Other configurations can be set up to lower the amount of power that is consumed, so it is important to keep this in mind (and increase the inference time).
- Results on the Jetson Nano: The findings of the deployment on the Jetson Nano demonstrate that the accuracy did not change compared to the values reported in Table 9. On the other hand, the inference time was approximately 3.4 milliseconds, and the computational power was 2.6 watts on average (2.0 W if considering the power consumed by the GPU only). Concerning the Jetson TX2, these findings are associated with the configuration that offers the quickest possible inference time at the expense of the highest possible power consumption.
6. Discussion
7. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Tol, R.S. The economic effects of climate change. J. Econ. Perspect. 2009, 23, 29–51. [Google Scholar] [CrossRef] [Green Version]
- Lubchenco, J.; Karl, T. Extreme weather events. Phys. Today 2012, 65, 31. [Google Scholar] [CrossRef]
- Kallis, G. Droughts. Annu. Rev. Environ. Resour. 2008, 33, 85–118. [Google Scholar] [CrossRef]
- Han, J.; Dai, H.; Gu, Z. Sandstorms and desertification in Mongolia, an example of future climate events: A review. Environ. Chem. Lett. 2021, 19, 4063–4073. [Google Scholar] [CrossRef]
- Lindsey, R. Climate Change: Global Sea Level. 2020. Available online: https://www.climate.gov/ (accessed on 14 August 2022).
- Lee, C.C. Utilizing synoptic climatological methods to assess the impacts of climate change on future tornado-favorable environments. Nat. Hazards 2012, 62, 325–343. [Google Scholar] [CrossRef]
- Robock, A. Volcanic eruptions and climate. Rev. Geophys. 2000, 38, 191–219. [Google Scholar] [CrossRef]
- Xu, R.; Yu, P.; Abramson, M.J.; Johnston, F.H.; Samet, J.M.; Bell, M.L.; Haines, A.; Ebi, K.L.; Li, S.; Guo, Y. Wildfires, Global Climate Change, and Human Health. New Engl. J. Med. 2020, 383, 2173–2181. [Google Scholar] [CrossRef]
- Vukomanovic, J.; Steelman, T. A systematic review of relationships between mountain wildfire and ecosystem services. Landsc. Ecol. 2019, 34, 1179–1194. [Google Scholar] [CrossRef]
- Finlay, S.E.; Moffat, A.; Gazzard, R.; Baker, D.; Murray, V. Health impacts of wildfires. PLoS Curr. 2012, 4. Available online: https://currents.plos.org/disasters/article/health-impacts-of-wildfires/ (accessed on 11 November 2022). [CrossRef]
- Tanase, M.A.; Aponte, C.; Mermoz, S.; Bouvet, A.; Le Toan, T.; Heurich, M. Detection of windthrows and insect outbreaks by L-band SAR: A case study in the Bavarian Forest National Park. Remote Sens. Environ. 2018, 209, 700–711. [Google Scholar] [CrossRef]
- Pradhan, B.; Dini Hairi Bin Suliman, M.; Arshad Bin Awang, M. Forest fire susceptibility and risk mapping using remote sensing and geographical information systems (GIS). Disaster Prev. Manag. Int. J. 2007, 16, 344–352. [Google Scholar] [CrossRef]
- Guth, P.L.; Craven, T.; Chester, T.; O’Leary, Z.; Shotwell, J. Fire location from a single osborne firefinder and a dem. Proceedings of ASPRS Annual Conference Geospatial Goes Global: From Your Neighborhood to the Whole Planet, Maryland, MD, USA, 7–11 March 2005. [Google Scholar]
- Bouabdellah, K.; Noureddine, H.; Larbi, S. Using Wireless Sensor Networks for Reliable Forest Fires Detection. Procedia Comput. Sci. 2013, 19, 794–801. [Google Scholar] [CrossRef] [Green Version]
- Barmpoutis, P.; Papaioannou, P.; Dimitropoulos, K.; Grammalidis, N. A review on early forest fire detection systems using optical remote sensing. Sensors 2020, 20, 6442. [Google Scholar] [CrossRef] [PubMed]
- Bu, F.; Gharajeh, M.S. Intelligent and vision-based fire detection systems: A survey. Image Vis. Comput. 2019, 91, 103803. [Google Scholar] [CrossRef]
- Spiller, S.A.D.; Ansalone, L. Transfer learning analysis for wildfire segmenta-tion using PRISMA hyperspectral imagery and convolutional neural networks. In Proceedings of the IEEE WHISPERS, Rome, Italy, 13–16 September 2022. [Google Scholar]
- Spiller, D.; Ansalone, L.; Amici, S.; Piscini, A.; Mathieu, P.P. Analysis and Detection of Wildfires by Using Prisma Hyperspectral Imagery. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2021, 43, 215–222. [Google Scholar] [CrossRef]
- Boshuizen, C.; Mason, J.; Klupar, P.; Spanhake, S. Results from the Planet Labs Flock Constellation. Small Satellite Conference. 2014. Available online: https://digitalcommons.usu.edu/smallsat/2014/PrivEnd/1/ (accessed on 11 November 2022).
- Zhu, L.; Suomalainen, J.; Liu, J.; Hyyppä, J.; Kaartinen, H.; Haggren, H. A review: Remote sensing sensors. In Multi-Purposeful Application of Geospatial Data; Intech Open: London, UK, 2018; pp. 19–42. [Google Scholar]
- Thangavel, K.; Spiller, D.; Sabatini, R.; Marzocca, P.; Esposito, M. Near Real-time Wildfire Management Using Distributed Satellite System. IEEE Geosci. Remote Sens. Lett. 2022. [Google Scholar] [CrossRef]
- Ulivieri, C.; Anselmo, L. Multi-sun-synchronous (MSS) orbits for earth observation. Astrodynamics 1991, 1992, 123–133. [Google Scholar]
- Bernstein, R. Digital image processing of earth observation sensor data. IBM J. Res. Dev. 1976, 20, 40–57. [Google Scholar] [CrossRef] [Green Version]
- Showstack, R. Sentinel Satellites Initiate New Era in Earth Observation; Wiley Online Library: Hoboken, NJ, USA, 2014. [Google Scholar]
- Shah, S.B.; Grübler, T.; Krempel, L.; Ernst, S.; Mauracher, F.; Contractor, S. Real-Time Wildfire Detection from Space—A Trade-Off Between Sensor Quality, Physical Limitations and Payload Size. Int. Arch. Photogramm. Remote Sens. Spatial Inf. Sci. 2019, 42, 209–213. [Google Scholar] [CrossRef] [Green Version]
- Del Rosso, M.P.; Sebastianelli, A.; Spiller, D.; Mathieu, P.P.; Ullo, S.L. On-Board Volcanic Eruption Detection through CNNs and Satellite Multispectral Imagery. Remote Sens. 2021, 13, 3479. [Google Scholar] [CrossRef]
- Esposito, M.; Dominguez, B.C.; Pastena, M.; Vercruyssen, N.; Conticello, S.S.; van Dijk, C.; Manzillo, P.F.; Koeleman, R. Highly Integration of Hyperspectral, Thermal and Artificial Intelligence for the Esa Phisat-1 Mission. Proceedings of International Airborne Conference 2019, Washington, DC, USA, 15–16 October 2019. [Google Scholar]
- Pastena, M.; Domínguez, B.C.; Mathieu, P.P.; Regan, A.; Esposito, M.; Conticello, S.; Dijk, C.V.; Vercruyssen, N.; Foglia, P. ESA Earth Observation Directorate NewSpace Initiatives. In Proceedings of the 33rd Annual AIAA/USU Conference on Small Satellites, Logan, UT, USA, 3–8 August 2019. [Google Scholar]
- Ruiz-de-Azua, J.A.; Fernandez, L.; Muñoz, J.F.; Badia, M.; Castella, R.; Diez, C.; Aguilella, A.; Briatore, S.; Garzaniti, N.; Calveras, A.; et al. Proof-of-Concept of a Federated Satellite System Between Two 6-Unit CubeSats for Distributed Earth Observation Satellite Systems. In Proceedings of the IGARSS 2019—2019 IEEE International Geoscience and Remote Sensing Symposium, Yokohama, Japan, 28 July–2 August 2019. [Google Scholar]
- Akhtyamov, R.; Vingerhoeds, R.; Golkar, A. Identifying Retrofitting Opportunities for Federated Satellite Systems. J. Spacecr. Rocket. 2019, 56, 620–629. [Google Scholar] [CrossRef] [Green Version]
- Golkar, A.; Lluch i Cruz, I. The Federated Satellite Systems paradigm: Concept and business case evaluation. Acta Astronaut. 2015, 111, 230–248. [Google Scholar] [CrossRef]
- Lluch, I.; Golkar, A. Design Implications for Missions Participating in Federated Satellite Systems. J. Spacecr. Rocket. 2015, 52, 1361–1374. [Google Scholar] [CrossRef]
- Xu, P.; Li, Q.; Zhang, B.; Wu, F.; Zhao, K.; Du, X.; Yang, C.; Zhong, R. On-Board Real-Time Ship Detection in HISEA-1 SAR Images Based on CFAR and Lightweight Deep Learning. Remote Sens. 2021, 13, 1995. [Google Scholar] [CrossRef]
- Viegas, D. Fire behaviour and fire-line safety. Ann. Medit. Burn. Club 1993, 6, 1998. [Google Scholar]
- Finney, M.A. FARSITE, Fire Area Simulator—Model Development and Evaluation; US Department of Agriculture, Forest Service, Rocky Mountain Research Station: Fort Collins, CO, USA, 1998. [Google Scholar]
- Pastor, E.; Zárate, L.; Planas, E.; Arnaldos, J. Mathematical models and calculation systems for the study of wildland fire behaviour. Prog. Energy Combust. Sci. 2003, 29, 139–153. [Google Scholar] [CrossRef]
- Alkhatib, A. Forest Fire Monitoring. In Forest Fire; Szmyt, J., Ed.; IntechOpen: London, UK, 2018. [Google Scholar] [CrossRef] [Green Version]
- Tedim, F.; Leone, V.; Amraoui, M.; Bouillon, C.; Coughlan, M.R.; Delogu, G.M.; Fernandes, P.M.; Ferreira, C.; McCaffrey, S.; McGee, T.K.; et al. Defining Extreme Wildfire Events: Difficulties, Challenges, and Impacts. Fire 2018, 1, 9. [Google Scholar] [CrossRef] [Green Version]
- Scott, J.H. Introduction to wildfire behavior modeling. In National Interagency Fuel, Fire, & Vegetation Technology Transfer; 2012; Available online: http://pyrologix.com/wp-content/uploads/2014/04/Scott_20121.pdf (accessed on 11 November 2022).
- Yu, P.; Xu, R.; Abramson, M.J.; Li, S.; Guo, Y. Bushfires in Australia: A serious health emergency under climate change. Lancet Planet. Health 2020, 4, e7–e8. [Google Scholar] [CrossRef] [Green Version]
- Gill, A.M. Biodiversity and bushfires: An Australia-wide perspective on plant-species changes after a fire event. Australia’s biodiversity–responses to fire: Plants, birds and invertebrates. Environ. Aust. Biodivers. Tech. Pap. 1999, 1, 9–53. [Google Scholar]
- Canadell, J.G.; Meyer, C.P.; Cook, G.D.; Dowdy, A.; Briggs, P.R.; Knauer, J.; Pepler, A.; Haverd, V. Multi-decadal increase of forest burned area in Australia is linked to climate change. Nat. Commun. 2021, 12, 6921. [Google Scholar] [CrossRef]
- Buergelt, P.T.; Smith, R. Chapter 6–Wildfires: An Australian Perspective. In Wildfire Hazards, Risks and Disasters; Shroder, J., Paton, D., Eds.; Elsevier: Oxford, UK, 2015; pp. 101–121. [Google Scholar]
- Tran, B.N.; Tanase, M.A.; Bennett, L.T.; Aponte, C. High-severity wildfires in temperate Australian forests have increased in extent and aggregation in recent decades. PLoS ONE 2020, 15, e0242484. [Google Scholar] [CrossRef] [PubMed]
- Haque, M.K.; Azad, M.A.K.; Hossain, M.Y.; Ahmed, T.; Uddin, M.; Hossain, M.M. Wildfire in Australia during 2019–2020, Its Impact on Health, Biodiversity and Environment with Some Proposals for Risk Management: A Review. J. Environ. Prot. 2021, 12, 391–414. [Google Scholar] [CrossRef]
- Tricot, R. Venture capital investments in artificial intelligence: Analysing trends in VC in AI companies from 2012 through 2020. OECD Digital Economy Papers, No. 319; OECD Publishing: Paris, France. [CrossRef]
- Loizzo, R.; Ananasso, C.; Guarini, R.; Lopinto, E.; Candela, L.; Pisani, A.R. The Prisma Hyperspectral Mission. In Proceedings of the Living Planet Symposium, Prague, Czech Republic, 9–13 May 2016. [Google Scholar]
- Shaik, R.; Laneve, G.; Fusilli, L. An Automatic Procedure for Forest Fire Fuel Mapping Using Hyperspectral (PRISMA) Imagery: A Semi-Supervised Classification Approach. Remote Sens. 2022, 14, 1264. [Google Scholar] [CrossRef]
- Shaik, R.; Giovanni, L.; Fusilli, L. Dynamic Wildfire Fuel Mapping Using Sentinel—2 and Prisma Hyperspectral Imagery. In Proceedings of the 2022 IEEE International Geoscience and Remote Sensing Symposium, Kuala Lumpur, Malaysia, 17–22 July 2022; pp. 5973–5976. [Google Scholar]
- Costantini, M.; Laneve, G.; Magliozzi, M.; Pietranera, L.; Sacco, P.; Shaik, R.; Tapete, D.; Tricomi, A.; Zavagli, M. Forest Fire Fuel Map from PRISMA Hyperspectral Data: Algorithms and First Results. Proceedings of Living Planet Symposium 2022, Bonn, Germany, 23–27 May 2022. [Google Scholar] [CrossRef]
- Guarini, R.; Loizzo, R.; Facchinetti, C.; Longo, F.; Ponticelli, B.; Faraci, M.; Dami, M.; Cosi, M.; Amoruso, L.; De Pasquale, V.; et al. Prisma Hyperspectral Mission Products. In Proceedings of the 2018 IEEE International Geoscience and Remote Sensing Symposium, Valencia, Spain, 22–27 July 2018; pp. 179–182. [Google Scholar]
- Spiller, D.; Thangavel, K.; Sasidharan, S.T.; Amici, S.; Ansalone, L.; Sabatini, R. Wildfire Segmentation Analysis from Edge Computing for On-Board Real-Time Alerts Using Hyperspectral Imagery. In Proceedings of the 2022 IEEE International Conference on Metrology for Extended Reality, Artificial Intelligence and Neural Engineering (MetroXRAINE), Rome, Italy, 26–28 October 2022. [Google Scholar]
- Hu, W.; Huang, Y.; Wei, L.; Zhang, F.; Li, H. Deep Convolutional Neural Networks for Hyperspectral Image Classification. J. Sens. 2015, 2015, 258619. [Google Scholar] [CrossRef] [Green Version]
- Spiller, D.; Ansalone, L.; Carotenuto, F.; Mathieu, P.P. Crop type mapping using prisma hyperspectral images and one-dimensional convolutional neural network. Proceedings of IEEE International Geoscience and Remote Sensing Symposium IGARSS 2021, Virtual Conference, 12–16 July 2021. [Google Scholar]
- Bangash, I. NVIDIA Jetson Nano vs. Google Coral vs. Intel NCS. A Comparison. 2020. Available online: https://towardsdatascience.com/nvidia-jetson-nano-vs-google-coral-vs-intel-ncs-a-comparison-9f950ee88f0d (accessed on 12 September 2022).
- Thangavel, K.; Spiller, D.; Sabatini, R.; Marzocca, P. On-board Data Processing of Earth Observation Data Using 1-D CNN. Proceedings of SmartSat CRC Conference, Sydneyy, NSW, Australia, 12–13 September 2022. [Google Scholar] [CrossRef]
- Kurniawan, A. Administering NVIDIA Jetson Nano. In IoT Projects with NVIDIA Jetson Nano; Springer: Berlin/Heidelberg, Germany, 2021; pp. 21–47. [Google Scholar]
- Kurniawan, A. Introduction to NVIDIA Jetson Nano. In IoT Projects with NVIDIA Jetson Nano; Springer: Berlin/Heidelberg, Germany, 2021; pp. 1–6. [Google Scholar]
- Kurniawan, A. NVIDIA Jetson Nano Programming. In IoT Projects with NVIDIA Jetson Nano; Springer: Berlin/Heidelberg, Germany, 2021; pp. 49–62. [Google Scholar]
- Süzen, A.; Duman, B.; Şen, E.B. Benchmark Analysis of Jetson TX2, Jetson Nano and Raspberry PI using Deep CNN. In Proceedings of the 2020 International Congress on Human-Computer Interaction, Optimization and Robotic Applications (HORA), Ankara, Turkey, 26–28 June 2020. [Google Scholar]
- Cui, H.; Dahnoun, N. Real-Time Stereo Vision Implementation on Nvidia Jetson TX2. In Proceedings of the 2019 8th Mediterranean Conference on Embedded Computing (MECO), Budva, Montenegro, 10–14 June 2019; pp. 1–5. [Google Scholar]
- Nguyen, H.H.; Trần, Đ.; Jeon, J. Towards Real-Time Vehicle Detection on Edge Devices with Nvidia Jetson TX2. In Proceedings of the 2020 IEEE International Conference on Consumer Electronics—Asia (ICCE-Asia), Seoul, Republic of Korea, 1–3 November 2020; pp. 1–4. [Google Scholar]
- Amici, S.; Piscini, A. Exploring PRISMA Scene for Fire Detection: Case Study of 2019 Bushfires in Ben Halls Gap National Park, NSW, Australia. Remote Sens. 2021, 13, 1410. [Google Scholar] [CrossRef]
- Amici, S.; Spiller, D.; Ansalone, L.; Miller, L. Wildfires Temperature Estimation by Complementary Use of Hyperspectral PRISMA and Thermal (ECOSTRESS &L8). J. Geophys. Res. Biogeosci. 2022, 127, e2022JG007055. [Google Scholar]
- Arnold, S.; Nuzzaci, R.; Gordon-Ross, A. Energy budgeting for CubeSats with an integrated FPGA. In Proceedings of the IEEE Aerospace Conference Proceedings, Big Sky, MT, USA, 3–10 March 2012. [Google Scholar]
- Ranasinghe, K.; Sabatini, R.; Gardi, A.; Bijjahalli, S.; Kapoor, R.; Fahey, T.; Thangavel, K. Advances in Integrated System Health Management for mission-essential and safety-critical aerospace applications. Prog. Aerosp. Sci. 2022, 128, 100758. [Google Scholar] [CrossRef]
- Wischert, D.; Baranwal, P.; Bonnart, S.; Álvarez, M.C.; Colpari, R.; Daryabari, M.; Desai, S.; Dhoju, S.; Fajardo, G.; Faldu, B.; et al. Conceptual design of a mars constellation for global communication services using small satellites. In Proceedings of the 71st International Astronautical Congress, IAC 2020, Virtual, 12–14 October 2020. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Orbit | Altitude | Advantages |
|---|---|---|
| Geostationary Earth Orbit (GEO) | Circular orbit with an altitude of 35,786 km and zero inclination |
|
| Low Earth Orbit (LEO) | Altitude of 2000 km or less |
|
| Sun-Synchronous Orbit (SSO) | Nearly polar orbit that passes the equator at the same local time on every pass. Typical Sun-synchronous Earth orbits are 600–800 km. |
|
| (Satellite)-Sensor | Spectral Bands | Access to the Data | Spatial Scale | Spatial Resolution | Specs/Advantages/Limitations | Data Coverage | Accuracy Range |
|---|---|---|---|---|---|---|---|
| Terra/Aqua-MODIS | 36 (0.4–14.4 µm) | Registration Required (NASA) | Global | 0.25 km (bands 1–2) 0.5 km (bands 3–7) 1 km (bands 8–36) | Easily accessible, limited spatial resolution, revisit time: 1–2 days | Earth | 92.75–98.32% |
| Himawari-8/9—AHI-8 | 16 (0.4–13.4 µm) | Registration Required/ (Himawari Cloud) | Regional | 0.5 km or 1 km for visible and near-infrared bands and 2 km for infrared bands | Imaging sensors with high radiometric, spectral, and temporal resolution. 10 min (Full disk), revisit time: 5 min for areas in Japan/Australia) | East Asia and Western Pacific | 75–99.5% |
| MSG—SEVIRI | 12 (0.4–13.4 µm) | Registration Required (EUMETSAT) | Regional | 1 km for the high-resolution visible channel, 3 km for the infrared and the 3 other visible channels | Low noise in the long-wave IR channels, tracking of dust storms in near-real-time, susceptibility of the larger field of view to contamination by cloud and lack of dual-view capability, revisit time: 5–15 min | Atlantic Ocean, Europe and Africa | 71.1–98% |
| GOES-16 and 18 | 16 (0.4–13.4 µm) | Registration Required (NOAA) | Regional | 0.5 km for the 0.64 µm visible channel 1 km for other visible/near-IR 2 km for bands > 2 µm | Infrared resolutions allow the detection of much smaller wildland fires with high temporal resolution but relatively low spatial resolution, and delays in data delivery, revisit time: 5–15 min | Western Hemisphere (North and South America) | 94–98% |
| HuanJing (HJ)-1B—WVC (Wide View CCD Camera)/IRMSS (Infrared Multispectral Scanner) | WVC: 4 (0.43–0.9 µm) IRMSS: 4 (0.75–12.5 µm) | Registration Required | Regional | WVC: 30 m IRMSS: 150–300 m | Lack of an onboard calibration system to track HJ-1 sensors’ on-orbit behaviour throughout the life of the mission, revisit time: 4 days | Asian and Pacific Region | 94.45% |
| POES/MetOp—AVHRR | 6 (0.58–12.5 µm) | Registration Required (NOAA) | Global | 1.1 km by 4 km at nadir | Coarse spatial resolution, revisit time: 6 h | Earth | 99.6% |
| S-NPP/ NOAA-20/NOAA— VIIRS-375 m | 16 M-bands (0.4–12.5 µm) 5 I-bands (0.6–12.4 µm) 1 DNB (0.5–0.9 µm) | Registration Required (NASA) | Global | 0.75 km (M-bands) 0.375 km (I-bands) 0.75 km (DNB) | Increased spatial resolution, improved mapping of large fire perimeters, revisit time: 12 h | Earth | 89–98.8% |
| CubeSats (data refer to a specific design from [25]) | 2: MWIR (3–5 µm) and LWIR (8–12 µm) | Commercial access planned | Global | 0.2 km | Small physical size, reduced cost, improved temporal resolution/response time, Revisit time: less than 1 h. | Wide coverage in orbit | - |
| Fire Category | Real-Time Measurable Behaviour Parameters | Real-Time Observable Manifestations of Extreme Fire Behaviour ((EFB) | Type of Fire and Capacity of Control | ||||||
|---|---|---|---|---|---|---|---|---|---|
| Fireline Intensities (FLI) (kWm−1) | Rate Of Spread (ROS) (m/min) | Flame Length (FL) (m) | Pyrocumulonimbus (PyroCb) | Downdrafts | Spotting Activity | Spotting Distance (m) | |||
| Normal Fires | 1 | <500 | <5 a <15 b | <1.5 | Absent | Absent | Absent | 0 | Surface fire Fairly easy |
| 2 | 500–2000 | <15 a <30 b | <2.5 | Absent | Absent | Low | <100 | Surface fire Moderately difficult | |
| 3 | 2000–4000 | <20 c <50 d | 2.5–3.5 | Absent | Absent | High | ≥100 | Surface fire, torching possible Very difficult | |
| 4 | 4000–10,000 | <50 c <100 d | 3.5–10 | Unlikely | In some localised cases | Prolific | 500–1000 | Surface fire, crowning likely depending on vegetation type and stand structure Extremely difficult | |
| Extreme Wildfire Events | 5 | 10,000–30,000 | <150 c <250 d | 10–50 | Possible | Present | Prolific | >1000 | Crown fire, either wind- or plume-driven Spotting plays a relevant role in fire growth Possible fire breaching across an extended obstacle to local spread Chaotic and unpredictable fire spread Virtually impossible |
| 6 | 30,000–100,000 | <300 | 50–100 | Probable | Present | Massive Spotting | >2000 | Plume-driven, highly turbulent fire Chaotic and unpredictable fire spread Spotting, including long distance, plays a relevant role in fire growth Possible fire breaching across an extended obstacle to local spread Impossible | |
| 7 | >100,000 (possible) | >300 (possible) | >100 (possible) | Present | Present | Massive Spotting | >5000 | Plume-driven, highly turbulent fire Area-wide ignition and firestorm development non-organised flame fronts because of extreme turbulence/vorticity and massive spotting Impossible | |
| Year | Event Name | Affected Area | Burned Area (Approx. Acres) |
|---|---|---|---|
| 1 June 2020–1 June 2021 | 2020–2021 Australian wildfire seasons | Nationwide | 617,763 |
| 5 September 2019–2 March 2020 | 2019–2020 Australian wildfire season (Black Summer) | Nationwide | 46,030,000 |
| February 2019 | Tingha wildfire | New South Wales | 57,870 |
| 11–14 February 2017 | 2017 New South Wales wildfires | New South Wales | 130,000 |
| January 2016 | 2016 Murray Road wildfire (Waroona and Harvey) | Western Australia | 170,910 |
| 25 November–2 December 2015 | 2015 Pinery wildfire | South Australia | 210,000 |
| 15–24 November 2015 | Perth Hills wildfire complex–Solus Group | Western Australia | 24,750 |
| October–November 2015 | 2015 Esperance wildfires | Western Australia | 490,000 |
| 29 January–20 February 2015 | 2015 O’Sullivan wildfire (Northcliffe–Windy Harbour) | Western Australia | 244,440 |
| 2–9 January 2015 | 2015 Sampson Flat wildfires | South Australia | 49,000 |
| January 2015 | 2015 Lower Hotham wildfire (Boddington) | Western Australia | 129,420 |
| 1 August–9 August 2015 | 2015 Wentworth Falls Winter Fire | New South Wales | 2,000 |
| 17–28 October 2013 | 2013 New South Wales wildfires | New South Wales | 250,000 |
| 18 January 2013 | Warrumbungle wildfire | New South Wales | 130,000 |
| 4 January 2013 | Tasmanian wildfires | Tasmania | 49,000 |
| 27 December 2011–3 February 2012 | Carnarvon wildfire complex | Western Australia | 2,000,000 |
| 7 February–14 March 2009 | Black Saturday wildfires | Victoria | 1,100,000 |
| 30 December 2007 | Boorabbin National Park | Western Australia | 99,000 |
| Pixels per Classes | |||||||
|---|---|---|---|---|---|---|---|
| Wildfire Location | Usage | 0 Fire | 1 Smoke | 2 Burned Areas | 3 Vegetation | 4 Bare Soil | Total |
| North-East | Train & Val | 58 | 10 | 30 | 50 | 40 | 188 |
| South | Test | 11 | 11 | 9 | 10 | 10 | 51 |
| North-West | Test | 5 | 0 | 5 | 5 | 5 | 20 |
| Parameters | Nvidia Jetson Nano | Google Coral USB | Intel Movidius NCS |
|---|---|---|---|
| Inference time | ~38 ms | ~70–92.32 ms | ~225–227 ms |
| fps | ~25 | ~9–7 | ~4.43–4.39 |
| CPU usage | 47–50% | 135% | 87–90% |
| Memory usage | 32 % | 8.7% | ~7% |
| OS | Ubuntu 18.04 aarch64 | Raspbian GNU/License 10 (Buster) | Raspbian GNU/License 9 (Stretch) |
| Precision | Recall | F1 Score | |
|---|---|---|---|
| 0—Fire | 1.00 | 1.00 | 1.00 |
| 1—Smoke | 1.00 | 1.00 | 1.00 |
| 2—Burned | 1.00 | 1.00 | 1.00 |
| 3—Vegetation | 0.92 | 1.00 | 0.96 |
| 4—Bare soil | 1.00 | 0.92 | 0.96 |
| Accuracy | 0.98 | ||
| Macro average | 0.98 | 0.98 | 0.98 |
| Weighted average | 0.98 | 0.98 | 0.98 |
| Wildfire Location | Precision | Recall | F1 Score |
|---|---|---|---|
| Australia, North-East | 0.98 | 0.98 | 0.98 |
| Australia, South | 0.98 | 0.98 | 0.98 |
| Australia, North-West | 1.00 | 0.95 | 0.97 |
| HW Accelerator | Inference Time (ms) | Power Consumption (W) |
|---|---|---|
| Movidius | 5.8 | 1.4 |
| Jetson TX2 | 3.0 | 4.8 (2.1 GPU only) |
| Jetson Nano | 3.4 | 2.6 (2.0 GPU only) |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Thangavel, K.; Spiller, D.; Sabatini, R.; Amici, S.; Sasidharan, S.T.; Fayek, H.; Marzocca, P. Autonomous Satellite Wildfire Detection Using Hyperspectral Imagery and Neural Networks: A Case Study on Australian Wildfire. Remote Sens. 2023, 15, 720. https://doi.org/10.3390/rs15030720
Thangavel K, Spiller D, Sabatini R, Amici S, Sasidharan ST, Fayek H, Marzocca P. Autonomous Satellite Wildfire Detection Using Hyperspectral Imagery and Neural Networks: A Case Study on Australian Wildfire. Remote Sensing. 2023; 15(3):720. https://doi.org/10.3390/rs15030720
Chicago/Turabian StyleThangavel, Kathiravan, Dario Spiller, Roberto Sabatini, Stefania Amici, Sarathchandrakumar Thottuchirayil Sasidharan, Haytham Fayek, and Pier Marzocca. 2023. "Autonomous Satellite Wildfire Detection Using Hyperspectral Imagery and Neural Networks: A Case Study on Australian Wildfire" Remote Sensing 15, no. 3: 720. https://doi.org/10.3390/rs15030720
APA StyleThangavel, K., Spiller, D., Sabatini, R., Amici, S., Sasidharan, S. T., Fayek, H., & Marzocca, P. (2023). Autonomous Satellite Wildfire Detection Using Hyperspectral Imagery and Neural Networks: A Case Study on Australian Wildfire. Remote Sensing, 15(3), 720. https://doi.org/10.3390/rs15030720