2.1. Phase-Measuring Sidescan Sonar
Phase-measuring sidescan sonars (PMSS), sometimes referred to as ‘interferometric’ sonar, phase-measuring bathymetric sonar, or multi-phase echo sounders, use a single transducer element with multiple receiver elements on independent port and starboard arrays [
5,
18,
19,
20,
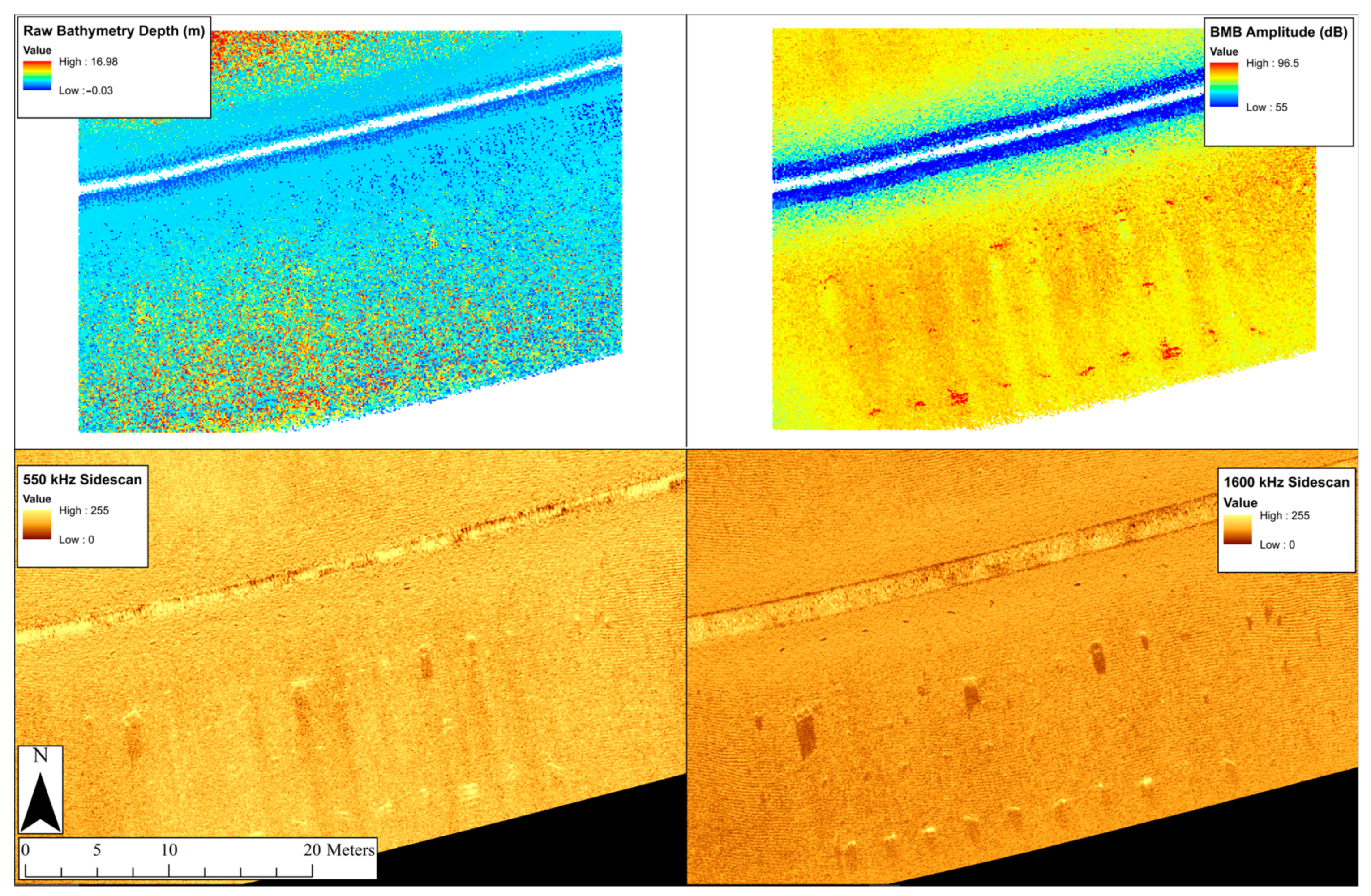
21]. This technique allows for the collection of both true sidescan imagery, swath bathymetry, and BMB derived from the bathymetric data set, referred to herein as sidescan backscatter, bathymetry, and BMB, respectively (
Figure 1). Borrelli et al. (2021) [
5] discussed examples of the first two data sets with the instrument used here. This paper discusses the third data set as it is applied to the DCL of UXO for the ongoing project discussed above.
The BMB amplitude used in this study is not the amplitude of a singular returning waveform but a combined intensity value processed through the manufacturer’s proprietary algorithm. The amplitude used in this study is a relative data set, similar to that of sidescan backscatter. The intensity of the returning sound is not calibrated to a known reference or constant across bottom types and will be scaled dynamically throughout the range of intensities received during a specific survey. This is due to the estimation of the angle of arrival from the backscattering acoustic energy inherent with the transducer/receiver array, rather than, for example, the known angle of calibrated multibeam echo sounders (MBES) or single beam echo sounders (SBES) backscatter [
22].
The instrument used in this study was an EdgeTech 6205 dual-frequency, phase-measuring sidescan sonar (PMSS). This sonar operates simultaneously collecting two frequencies of sidescan backscatter (550 kHz, 1600 kHz) and one frequency of bathymetry and BMB (550 kHz). Due to the simultaneous collection of these data, they are co-located on the seafloor and allow for increased survey efficiency negating the need for two independent systems and the challenges of combining data from two separate systems [
5].
The EdgeTech 6205 is a hard-mounted setup which allows for easier shallow water surveying in water depths less than 5 m when compared to traditionally towed systems. There is a sound velocity sensor within the housing that allows for the correction for the speed of sound in water at the surface during the time of the survey with a stated resolution and accuracy of 0.001 m/s and ± 0.025 m/s, respectively (EdgeTech, 2021, West Wareham, MA, USA). Attached to the lower housing, there are independent port and starboard sonar arrays. Each of these sonar arrays are constructed with 11 piezoelectric elements, of which a single element is used for the transmission of the sound energy (EdgeTech, 2019, West Wareham, MA, USA). For sidescan data, a single transmit element and single receive element are used, allowing for the collection of traditional sidescan backscatter. For bathymetric and BMB data, a single transmit element with 10 separate receive elements for phase differentiation and angle estimation are used. All eleven elements are equally spaced at approximately one half-wavelength of the transmit frequency (EdgeTech, 2019, West Wareham, MA, USA). For this study, the single channel range was set at 20 m (40 m swath), generating a ping frequency of 69.8 Hz yielding a 14.3 ms interval.
2.3. Study Site
This study focuses on the data collected during three trials from the larger study (MR19-5079)—trials 4, 5, and 6. All three trial sites for this study are on Cape Cod, MA, USA (
Figure 3). Trials 4 and 5 take place in Wellfleet, MA, USA and trial 6 in Provincetown, MA, USA. Cape Cod Bay is ideal for these types of investigations due to the variability of intertidal bottom types (mud, sand, and gravel), as well as the mesotidal range (3.07 m) and semidiurnal tidal cycles that occur (NOAA, 2022). The tidal range and cycle allow for the intertidal deployment and surveying during an early morning low tide, a mid-day, high-tide vessel-based survey, and an end-of-day, low tide, re-survey and retrieval of objects within a single day.
Trial 4 at site 1 took place at Chipman’s Cove in Wellfleet Harbor, Wellfleet, MA, USA. Chipman’s Cove is a well-protected, low-energy cove within the harbor. Due to the protected nature of this area, it is able to maintain a layer sediment that behaves cohesively (
Figure 4). This fine-grained material is classified here as mud, since that is the predominant bed type that the sonar will interact with. The seafloor in this location also contains many articulate shells and shell fragments, which contrast the softer, fine-grained sediments.
Trial 5 at site 2 took place at Duck Harbor beach in Wellfleet, MA, USA. Duck Harbor beach has a roughly north-to-south orientation and is fully exposed, though fetch-limited, to Cape Cod Bay to the west. This beach is a dynamic system that sees seasonal changes in its bed type, with higher energy waves removing finer-grained sediment to expose gravel beds in the intertidal region of the beachface. The prevalence of cobble-sized material was ideal for testing this method in a mixed sand and gravel setting.
Trial 6 at site 3 took place within Provincetown Harbor in Provincetown, MA, USA. The shoreline of Provincetown Harbor utilized for this study has a roughly east–west orientation. It is protected by the Provincetown Hook but is open to Cape Cod Bay to the south. This area has extensive sandy flats, which were used for this study.
2.4. Data Collection
2.4.1. Site 1, Chipman’s Cove, Wellfleet, MA, USA
Eight UXO objects were used, two of each caliber (60, 82, 105, 155 mm). The mud at the study site prevented safe access on foot; as a result, the UXOs were not precisely placed as at other sites with better access. Four UXOs, one of each size was tied together using the paracord line, with a small buoy on either end of the line for deployment and retrieval, creating two sets of four UXOs. These two lines of UXOs were deployed from the vessel onto the seafloor within the survey area.
Due to the nature of the study site, an RTK-GPS survey was not conducted. An aerial survey was conducted by a Federal Aviation Administration (FAA) licensed pilot using a DJI Phantom 4 Pro to create a high-resolution, georectified aerial mosaic and digital surface model (DSM) of the study site through structure-from-motion photogrammetry techniques. This allowed the locating of the nose and tail of each UXO from the mosaic to allow further analysis; see Borrelli et al. (this volume) for details of UAS survey methods.
Once in place, the acoustic survey team prepared track lines in a grid pattern at 5 m spacing around the study site. The close survey line spacing was designed to ensure an excessively high rate of overlap in the sidescan backscatter and a sufficient overlap for 100% coverage of bathymetric and BMB data.
2.4.2. Site 2, Duck Harbor, Wellfleet, MA, USA
Forty UXOs and nine clutter objects were used at site 2. The 40 UXOs were placed in a single north-to-south line along the gravel bed with each size class of UXO being grouped. The UXOs were aligned north to south as follows: 155 mm, 81 mm, 105 mm, 60 mm and were spaced roughly 3 m apart with varying orientations. This was done as the survey vessel could only safely travel in north-to-south directions, parallel to shore, and thus, the only way to effectively change the angle of ensonification was to change the orientation of the targets. No changes to orientations were made for the nine clutter objects. They were placed shoreward and parallel to the UXO. These clutter objects included two types of lobster pot, two metal cylinders of differing size, a cinder block, an anchor, a car tire, a boat propeller, and a set of diving weights.
Once all the objects were in place, an RTK-GPS survey was conducted using the Trimble R10. A GPS point at the nose and tail of each individual UXO, as well as points for the clutter objects were collected. This site is within the boundaries of the Cape Cod National Seashore and as such no aerial surveys were conducted at this site due to the proximity of nesting piping plovers (Charadrius melodus).
After seeding of the intertidal seafloor was completed, the acoustic surveying team planned survey lines at 5 m spacing over the study site. These survey lines ran roughly north to south along the study site. As stated above, no east-to-west lines were conducted at this site as the slope of the made it unsafe for the vessel to travel in this direction.
Once the tide was sufficiently low, the field team returned to the survey site for object retrieval. This included a repeat RTK-GPS survey of all objects to account for any movement that may have occurred throughout the tidal cycle. Once these data were collected, all objects were removed from the study site.
2.4.3. Site 3, Provincetown Harbor, Provincetown, MA, USA
Forty UXOs, fourteen calibration spheres, and eleven clutter objects were used at site 3. These objects were placed in five separate lines approximately 5 m apart in roughly a shore-parallel orientation. From north to south, 10 individual UXOs of similar caliber (60, 105, 81, and 155 mm) were placed in single lines with different orientations. In between the second and third lines of UXO were 11 clutter objects and 14 calibration spheres, the latter of which were placed in distinct patterned groups of 7 spheres each. The clutter objects used for this site include two cinder blocks, two lobster pots, a bundle of nylon line, two metal cylinders of differing sizes, a car tire, diving weights, a boat propeller, and a metal tube attached to a chain.
At site 2, once all the objects were in place, an RTK-GPS survey was conducted using the Trimble R10. In addition, an aerial survey similar to that conducted at site 1, but with many ground control points collected using the R10 helped to produce a high-resolution, geo-rectified, aerial mosaic and digital surface model (DSM) of site 3.
Once deployment data collection was complete, the acoustic survey team prepared the vessel platform and planned survey lines based on the placement of the UXO. Survey lines were prepared in a grid pattern at 5 m spacing running parallel and perpendicular to the object lines. Once the tide was sufficiently low, the field team returned to the survey site for retrieval and re-survey in the same manner as site 2.
2.5. Data Processing
The acoustic data were collected using EdgeTech’s Discover Bathymetric ver. 10.x in the JSF (.jsf) format. Data processing occurred through EdgeTech’s Discover Bathymetric ver. 10.x, Chesapeake Technology’s SonarWiz v.7 (SW7), Microsoft Excel, ESRI’s ArcMap ver. 10.8, R ver. 4.2.0, and RStudio ver. 2022.02.2. All packages in RStudio were downloaded through the Comprehensive R Archive Network (CRAN) and include mosaic, nnet, sjPlot, and readr.
Six lines of collected data from each site were used to conduct statistical analyses discussed below. The JSF data from all sites were collected in stave, or raw, format, which records the backscattering acoustic energy that return to the sonar within the given swath width for the survey, regardless of quality or filtering parameters. This allows for the reprocessing of the JSF data with variations in binning type and resolution, as well as filtering parameters within EdgeTech’s Discover Bathymetric software. Data processing methodology was first developed using site 3 data, then similar processing methods were implemented for data from sites 1 and 2 for analysis. For the purposes of this study, JSF stave data were reprocessed at the same swath range used for collection during the time of survey, 20 m for a 40 m full swath. No binning of the soundings was used to produce data representative of the native resolution of the sonar during the survey. This option allows for the representation of soundings without influence from nearby soundings in the binning process that may be more abundant or weighted more heavily in the bathymetric processing algorithms. Water column and automatic echo strength filtering was applied during the reprocessing of the data to eliminate soundings that are not representative of the seafloor or objects as this study does not aim to examine data within the water column. The signal-to-noise (SNR) filter was set to 20 dB to allow for the filtering of weak soundings. This value was selected due to the suggestion in EdgeTech’s JSF File and message description manual which states, “SNR values greater than 20 dB are excellent in terms of angle estimation quality…” (EdgeTech, 2021, West Wareham, MA, USA). The quality filter was set to 90%, which allows for the filtering of soundings that are not within the highest possible quality bin according to EdgeTech’s bathymetric processing algorithm (EdgeTech, 2021, West Wareham, MA, USA). The Outlier filter was also applied to allow for the removal of points that are deemed as outliers in EdgeTech’s bathymetric processing algorithm. This combination of processing parameters was selected so the soundings used further in the analysis were of the highest possible data quality.
Once the stave data were reprocessed in Discover Bathymetric, the individual JSF line files were imported into SW7. This software package allows for the processing of geolocated soundings and the visualization of these data through a bathymetric engine while accounting for vessel and instrument parameters and the speed of sound throughout the water column during a survey period through a process called merging. The vessel parameters for the R/V Marindin, as well as down-cast sound velocity profiles, attributed to individual survey lines based on the nearest in time, from the survey were used.
Once merged, the BMB data were processed in SW7 with no filtering or manipulation applied to the data to allow for the least altered data set possible. The data in the immediate vicinity of the objects were then exported from SW7 using the Export Bathymetry XYZ function. This function exports a csv file that contains the X, Y, Z, the amplitude of the BMB sounding in dB, the time and date of collection, and the distance from nadir for each sounding within the specified survey area, separated by the collection line number.
These individual line files were imported into ESRI ArcMap where they were consolidated into a single data set. This data set was then exported as a csv and imported into RStudio. Using the favstats function [
23] for the amplitude of the six-line subset, the third quartile value of the amplitude was calculated. It was visually observed that the returning amplitude from the BMB was typically higher than the surrounding seafloor for objects. Because of this high amplitude characteristic of the soundings that fall upon objects, soundings with an amplitude lower than the third quartile value for each survey were discarded.
Navigation data from the JSF files were exported from SW7 on a per-ping basis. These navigation data include the ping date, ping time, vessel heading, and vessel attitude (pitch, roll, and heave). These navigation data were linked to the individual soundings based on the data that was nearest in time using the VLOOKUP function in Excel. This yielded a csv file for each survey line with individual soundings with attributed X, Y, Z, amplitude, date, time, distance to nadir, survey line number, vessel heading, pitch, roll, and heave values.
The csv file was reimported into ESRI ArcMap where they were classified based on their relative location to objects. For each UXO at sites 2 and 3, the deployment RTK-GPS points from the nose and tail were used to create a line shapefile representing the UXO. From this line shapefile, a 25 cm buffer was created to represent the area in which soundings would be attributed for each UXO. For calibration spheres in site 3, a 25 cm buffer was created around the deployment RTK-GPS point. Deployment RTK-GPS points for clutter objects were also connected with line shapefiles, from which a 25 cm buffer was created. For site 1, because there were no RTK-GPS points for the objects, the georectified aerial mosaic was used to select points that best represent the nose and tail of the UXO. From these selections, a 25 cm buffer was created to select points that represent the UXO. The buffer size was set at 25 cm as this value visually encompassed soundings that appeared to differ from the surrounding seafloor while also allowing for inaccuracy in the sounding’s geolocation. An analysis of sidescan backscatter data from the same data set showed a geolocation accuracy of 52 to 185 mm, with a mean of 90 mm when comparing calculated target centroids with RTK-GPS centroids [
24], confirming the appropriate scale of this buffer.
Once 25 cm buffers were created for all objects, the Select by Location tool was used to select all soundings that fell within the buffers to classify them. There were three classifications used for these points: type, class, and object. This was done for all relevant objects at each site. The type classification indicated whether a point was associated with an object, regardless of what the object was or the surrounding seafloor. The class classification indicated whether a point was a UXO (inclusive of all sizes), calibration sphere, clutter object (inclusive of all clutter), or seafloor. The object classification indicated whether a point was a calibration sphere, clutter object, 155 mm UXO, 105 mm UXO, 81 mm UXO, 60 mm UXO, or the surrounding seafloor. Seafloor classifications were labeled as mud, gravel, and sand for sites 1, 2, and 3, respectively.
For all UXOs throughout the three sites, the line shapefiles from RTK-GPS points were used to calculate the heading of the UXO from nose to tail. This was done using the COGO toolkit in ArcMap. This UXO orientation was attributed to the respective soundings within the 25 cm buffer based on the individual classification. For soundings that were associated with calibration spheres, the heading was set to match that of the vessel heading taken from the navigational data. All clutter object and seafloor soundings were given an object heading of 0 as a place holder. An orientation offset between the vessel heading and orientation of objects was then calculated by subtracting the value of the object orientation from the vessel heading.
The final product of this data processing is a csv file for each survey containing BMB soundings from six lines of acoustic data, which have been filtered to just the third quartile value of the amplitude and higher. Each sounding has an associated X, Y, Z, the amplitude of the BMB sounding in dB, the time and date of collection, the distance from nadir in meters, collection line number, the per-ping vessel heading in degrees, pitch in degrees, roll in degrees, heave in meters, the type, class, and object classifications, an object orientation in degrees, and finally an object orientation offset from the vessel heading in degrees. From these data, the localization of objects can occur from the X, Y, and Z data. The detection and classification of objects will be attempted using statistical methods.
2.6. Statistical Analysis
Binomial logistic regression (BLR) and multinomial logistic regressions (MLR) were used for statistical differentiation between the seafloor types and the various objects, as well as between the objects themselves. These statistical modeling techniques are used to find the odds of an outcome variable occurring versus a baseline outcome based on selected attribute variables [
25]. BLR is a type of generalized linear model which uses the logit link function to fit the maximum likelihood outcome, which will yield the odds of selecting one outcome variable over a baseline outcome variable [
25].
MLR functions similarly to BLR but allows for more than two dependent variables to be tested by using the multinomial logit link function [
25].
where
X = (
X1, …,
Xp) are
p predictors,
β are model coefficients, with
k categories and
K being a reference category. In the case of this work, predictors would include variables BMB amplitude, distance from nadir, roll, and the orientation offset. Categories (
k) would be those created with type, class, and object classifications, with the reference category (
K) being specified for each test. Once selected, the predictors and all combinations of predictors for each category are analyzed by creating generalized linear models to find the best fit combinations that represent each category, and subsequently compared to the baseline category to find an odds ratio of selection to the respective category.
These statistical tests were chosen based on their ability to model probability outcomes, which in the case of this study, will give the probability of a sounding being associated with a particular object or seafloor type based on the attribute variables. The attribute variables used in the analysis were BMB amplitude (Amplitude), distance from nadir (Distance_t), roll (Roll), and the orientation offset (Offset). For all sites, the testing data were partitioned into two groups with 70% of the data being used for building the statistical models. The remaining 30% of the data was used for testing the models. These tests were run using the multinom function from the nnet package, which allows for logistic regression of two or more outcome classes. Interaction between these terms was allowed in each model so that every combination of these variables was tested. Each model was allowed to run for a maximum of 300 iterations or until convergence.
There are assumptions around data sets used with these statistical models [
26], which were adhered to by the data in this study. These assumptions include independence of outcome variables, which in the case of this study means that a singular sounding cannot be both ‘Sand’ and ‘Object’ simultaneously. There is also the assumption that the attribute variables are not perfectly separated based on the outcome variables. Within this study, there is overlap in the values of all attribute variable predictors between the outcome variables, that is to say the full range of values for all attribute variables can be associated with any of the outcome variables. These statistical tests also fit these data well because there is no assumption of linearity, normality, or homoscedasticity within the data set for these tests [
26].
For site 1, a single BLR model was created to differentiate between the ‘Class’ classification since only UXO were used at this site. A single MLR was created to attempt a more refined classification of soundings using the ‘Object’ designation. Due to the sample size of soundings that fall under the ‘Mud’ bed type designation being several orders of magnitude higher than ‘Object’ soundings, an additional MLR model was run excluding all soundings that were designated as ‘Mud’. This model was used to characterize ‘Object’ classifications.
For sites 2 and 3, a single BLR model was created to differentiate between the ‘Type’ classification. Two MLR models were created to attempt a more refined classification of soundings using the ‘Class’ and ‘Object’ designations described previously. For all three of these models for each site, the respective bed type was used as the reference category. Due to the sample size of soundings that fall under the respective bed type designation being several orders of magnitude higher than ‘Object’ soundings for both sites, an additional two MLR models for site 3 and additional MLR and BLR models for site 2 were run excluding all soundings that were designated as the bed type. These models were used to characterize the ‘Class’ and ‘Object’ classifications. For site 3, calibration spheres were set as the reference category when there was an elimination of ‘Sand’ soundings. For site 2, the 155 mm UXO was used as the reference category when there was an elimination of ‘Gravel’ soundings.
Classification matrices for the testing data that were run through the trained models are presented here, along with correct classification rates. The summary function in R was used to display output log odds ratios and standard errors. Using these data, Z- and P- values were calculated based on methods set forth by Blissett (2017). The log odds ratios were exponentiated to yield odds ratios that can be more easily compared. This function will present the odds ratios an X.XX…:1 output.












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}