

Recent Phenomenal and Investigational Subsurface Landslide Monitoring Techniques: A Mixed Review




Abstract
:1. Introduction
- (1)
- A mixed scientometric and systematic review is presented.
- (2)
- All existing subsurface-monitoring technologies (movement, forces and stresses, groundwater, temperature, and warning signs) were comprehensively addressed in this study.
- (3)
- A deep illustration of the data-transferring techniques is included (i.e., manual, wiring, wireless).
- (4)
- A detailed demonstration of the adopted physical laboratory and field-monitoring systems is presented.
- (5)
- This article presents the most recent research up until 2023.
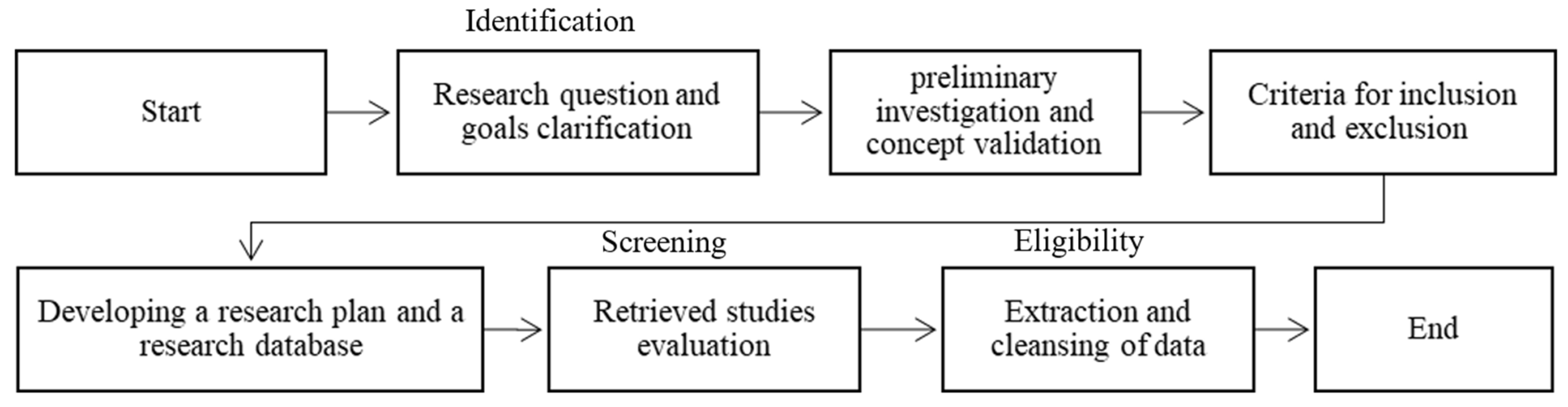
2. Research Methodology
2.1. Identification Process
2.2. Selection of Database and Keywords
2.3. Inclusion and Exclusion Criteria
2.4. Screening and Evaluation of Collected Articles
3. Scientometric Analysis
3.1. Landslide Monitoring Annual Publications
3.2. Top Journals Contributing to Landslide Monitoring
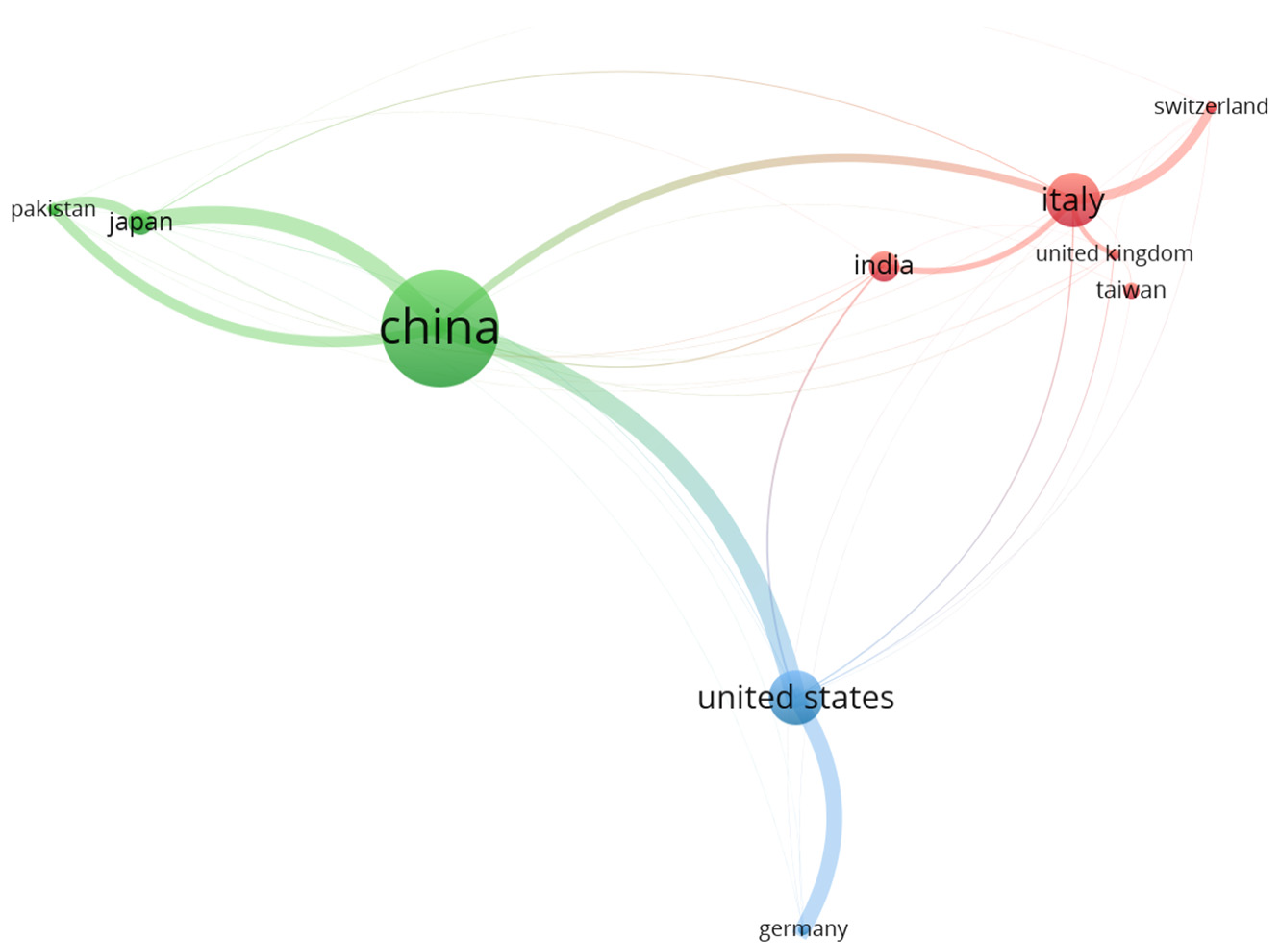
3.3. Active Nations and Institutes in Landslide Monitoring
3.4. Active Scholars and Article Co-Citation Analysis in Landslide Monitoring
3.5. Co-Occurrence Mapping of Keywords in Landslide Prediction
4. Systematic Review of Monitoring Techniques
4.1. Surface Displacements
4.2. Subsurface Monitoring
4.2.1. Movement-Monitoring Devices
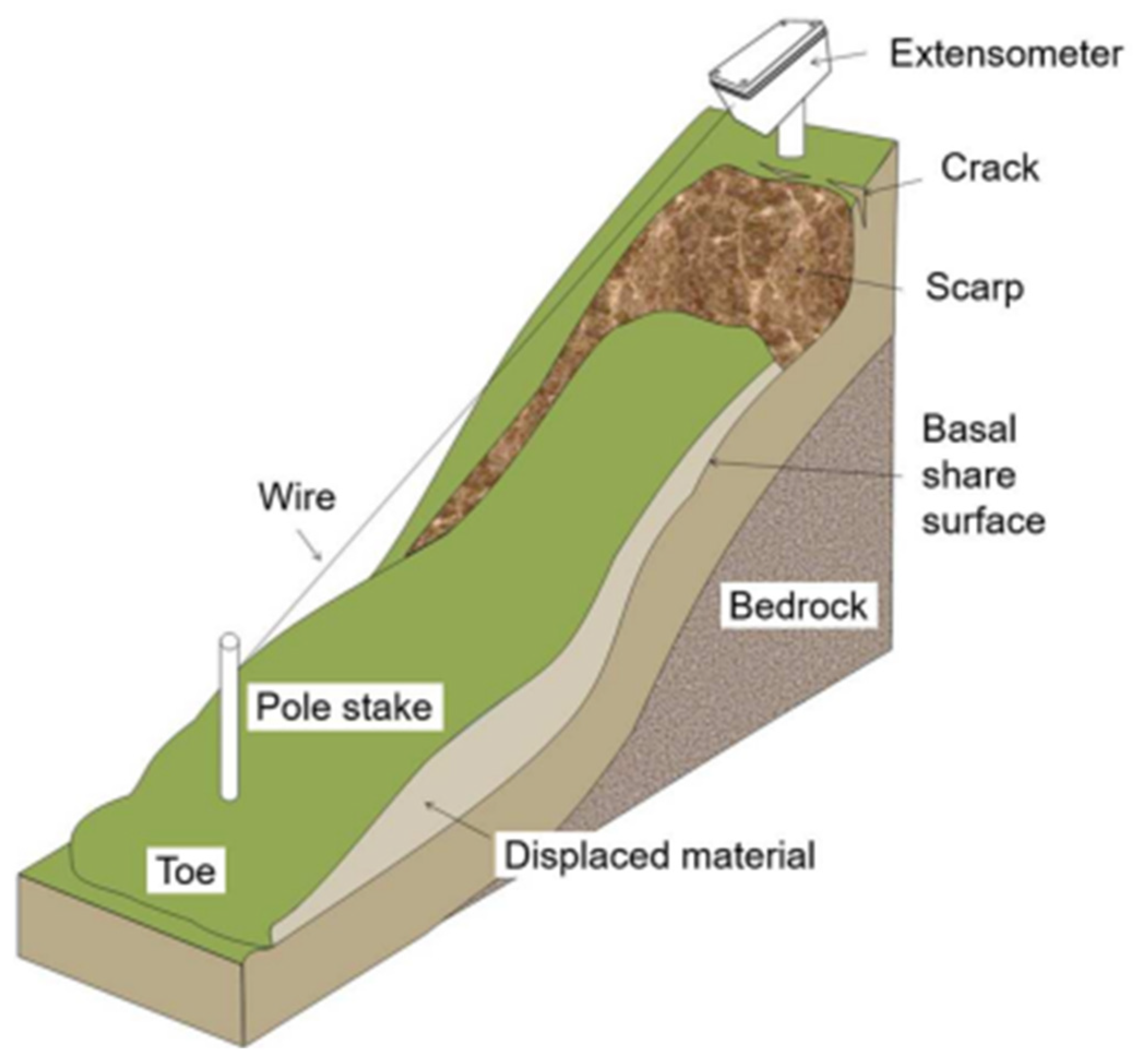
Extensometer Device
Inclinometers
Time Domain Reflectometry (TDR)

Acoustic Emission (AE)
Optical Fiber System
Electromechanical Tilt Sensors
Strain Gauge Sensors
Acceleration Sensors
4.2.2. Force and Stress Monitoring
4.2.3. Water and Temperature Monitoring
Precipitation Monitoring
Near-Surface Water Monitoring
Subsurface Water Monitoring
Temperature Monitoring
4.2.4. Warning Techniques
4.3. Wireless Sensing Network (WSN)
4.3.1. Energy Consumption Issues
4.3.2. Communication Issues
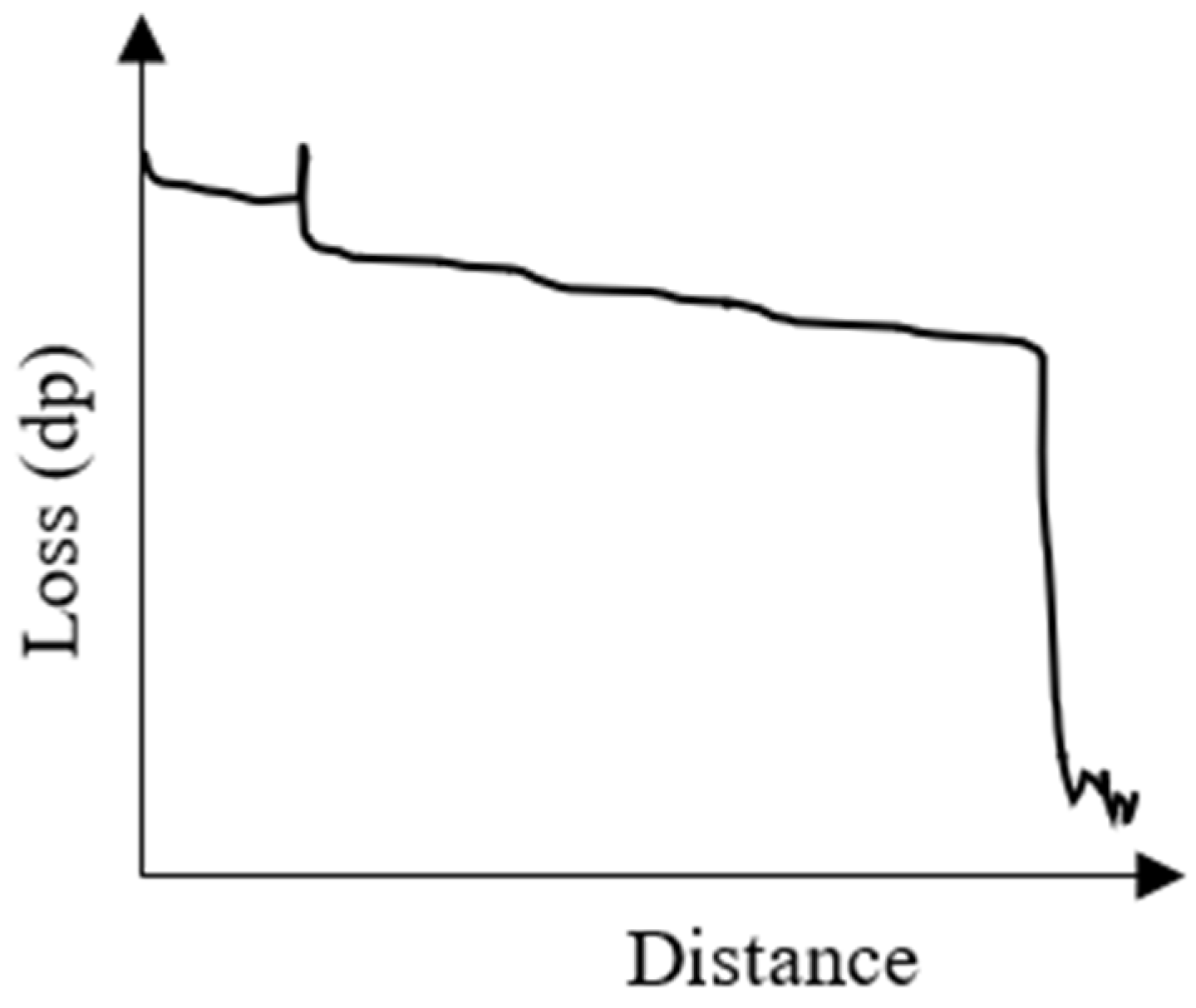
4.3.3. Data Loss and Size Issues
4.4. Physical and Prototype Systems
4.4.1. Experimental Models
4.4.2. Prototype Working Process
4.4.3. Field Systems
5. Research Gaps and Future Directions
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| ABS | Acrylonitrile butadiene styrene | MEMS | Microelectromechanical systems |
| AE | Acoustic emission | MFTL | Multi-feature fusion transfer learning |
| AIM | Accumulative integral method | MLATC | Mean-based low-rank autoregressive tensor completion |
| ANN | Artificial neural networks | MR–WPT | Magnetic resonance wireless power transfer |
| AOI | Area of interest | OFDR | Optical frequency domain reflectometry |
| BOCDA | Brillouin optical correlation-domain analysis | OTDR | Optical time domain reflectometry |
| BOFDA | Brillouin optical frequency-domain analysis | PCA | Principal component analysis |
| BOTDA | Brillouin optical time-domain analysis | POIS | Position and Inclination Sensor |
| BOTDR | Brillouin optical time-domain reflectometry | PSCFODS | Parallel-series connected fiber-optic displacement sensor |
| CAD | Context-aware data management | PS–InSAR | Persistent scatterer interferometry |
| CAE | Context-aware energy management | PVC | Polyvinyl chloride |
| CCVDM | Capacitive circuit voltage distribution method | QDFODS | Quasi-distributed fiber-optic displacement sensors |
| CET | Cable-extension transducer | RDC | Ringdown count |
| COFT | Combined optical fiber transducer | RTS | Robotized total station |
| C–OTDR | Coherent optical time domain reflectometry | SAA | ShapeAccelArray |
| CPT | Cone penetration test | SAAF | ShapeAccelArray/Field |
| CRLD | Constant resistance and large deformation | SAR | Synthetic aperture radar |
| CS | Compressed sensing | SAs | Smart aggregates |
| CS–TENG | Contact–separation mode TENG | SBS | Stimulated Brillouin scattering |
| DEMs | Digital elevation models | SDSs | Soil deformation sensors |
| DFOSS | Distributed fiber optical strain sensing | SG–DEP | Strain Gauge Deep Earth Probe |
| DInSAR | Differential (SAR) interferometry | SOF | Sensing optical fiber |
| DSS | Distributed strain sensing | SPT | Standard penetration test |
| EM | Electromagnetic | SSCC | Suction stress characteristic curves |
| EPCs | Earth pressure cells | SSPDM | Self-structure pressure distribution method |
| EPS | Expansile polyester ethylene | STFT | Short-time Fourier Transform |
| ERT | Electrical resistivity tomography | SWCC | Soil water characteristic curve |
| FBG | Fiber Bragg grating | SWP | Soil water potential |
| FODSs | Fiber-optic displacement sensors | TBR | Tipping bucket rain gauge |
| F-TENG | Freestanding TENG | TDR | Time domain reflectometry |
| GB–InSAR | Ground-based SAR | TENG | Triboelectric nanogenerators |
| GIS | Global information system | TSMP | Time-synchronized mesh protocol |
| GNSS | Global navigation satellite system | TTEFBS | Timbo-like triboelectric force and bend sensor |
| GPR | Ground penetration radar | UGV | Unmanned ground vehicles |
| GPS | Global positioning system | UHF RFID | Ultrahigh-frequency radio-frequency identification |
| IMUs | Inertial measuring units | UWB | Ultrawide band |
| IN | Inclinometers | VMC | Volumetric water content |
| InSAR | Interferometric synthetic aperture radar | Wi–GIM | Wireless sensor network for ground instability monitoring |
| IoT | Internet of things | WPT | Wireless power transfer |
| IPI | In-place inclinometers | WSN | Wireless sensor network |
| LiDAR | Light detection and ranging | WSNLM | Wireless sensor network for landslide monitoring |
| LLM | Lossless landslide monitoring | WUSNs | Wireless underground sensor networks |
| LOS | Line of sight | Z–TENG | Zigzag-structured triboelectric nanogenerator |
| MASW | Multichannel analysis of surface waves |
References
- De Graff, J.V. Perspectives for systematic landslide monitoring. Environ. Eng. Geosci. 2011, 17, 67–76. [Google Scholar] [CrossRef]
- Angeli, M.G.; Pasuto, A.; Silvano, S. A critical review of landslide monitoring experiences. Eng. Geol. 2000, 55, 133–147. [Google Scholar] [CrossRef]
- Bicocchi, G.; Tofani, V.; D’Ambrosio, M.; Tacconi-Stefanelli, C.; Vannocci, P.; Casagli, N.; Lavorini, G.; Trevisani, M.; Catani, F. Geotechnical and hydrological characterization of hillslope deposits for regional landslide prediction modeling. Bull. Eng. Geol. Environ. 2019, 78, 4875–4891. [Google Scholar] [CrossRef]
- Ebrahim, K.M.P.; Gomaa, S.M.M.H.; Zayed, T.; Alfalah, G. Landslide Prediction Models, Part I: Empirical-Statistical and Physically Based Causative Thresholds; Department of Building and Real Estate, Faculty of Construction and Environment, The Hong Kong Polytechnic University: Hong Kong, China, 2024. [Google Scholar]
- Ebrahim, K.M.P.; Gomaa, S.M.M.H.; Zayed, T.; Alfalah, G. Landslide Prediction Models, Part II: Deterministic Physical and Phenomenologically Models; Department of Building and Real Estate, Faculty of Construction and Environment, The Hong Kong Polytechnic University: Hong Kong, China, 2024. [Google Scholar]
- Ramesh, M.; Vasudevan, N. The deployment of deep-earth sensor probes for landslide detection. Landslides 2012, 9, 457–474. [Google Scholar] [CrossRef]
- Rosi, A.; Berti, M.; Bicocchi, N.; Castelli, G.; Corsini, A.; Mamei, M.; Zambonelli, F. Landslide monitoring with sensor networks: Experiences and lessons learnt from a real-world deployment. Int. J. Sens. Netw. 2011, 10, 111–122. [Google Scholar] [CrossRef]
- Giri, P.; Ng, K.; Phillips, W. Laboratory simulation to understand translational soil slides and establish movement criteria using wireless IMU sensors. Landslides 2018, 15, 2437–2447. [Google Scholar] [CrossRef]
- Chuan, W.; Wen-Qiao, W.; Guo-Jun, W.; Xiao-Ming, W. Multiple parameter monitoring system for landslide. Int. J. Smart Sens. Intell. Syst. 2013, 6, 1200–1229. [Google Scholar] [CrossRef]
- Kumar, N.; Ramesh, M.V. Accurate iot based slope instability sensing system for landslide detection. IEEE Sens. J. 2022, 22, 17151–17161. [Google Scholar] [CrossRef]
- Liu, Y.; Hazarika, H.; Kanaya, H.; Takiguchi, O.; Rohit, D. Landslide prediction based on low-cost and sustainable early warning systems with IoT. Bull. Eng. Geol. Environ. 2023, 82, 177. [Google Scholar] [CrossRef]
- Artese, G.; Perrelli, M.; Artese, S.; Meduri, S.; Brogno, N. POIS, a low cost tilt and position sensor: Design and first tests. Sensors 2015, 15, 10806–10824. [Google Scholar] [CrossRef]
- Shamshi, M.A. Technologies convergence in recent instrumentation for natural disaster monitoring and mitigation. IETE Tech. Rev. 2004, 21, 277–290. [Google Scholar] [CrossRef]
- Eyo, E.E.; Musa, T.A.; Omar, K.M.; MIdris, K.; Bayrak, T.; Onuigbo, I.C.; Opaluwa, Y.D. Application of low-cost GPS tools and techniques for landslide monitoring: A review. J. Teknol. 2014, 71, 71–78. [Google Scholar] [CrossRef]
- Chae, B.G.; Park, H.J.; Catani, F.; Simoni, A.; Berti, M. Landslide prediction, monitoring and early warning: A concise review of state-of-the-art. Geosci. J. 2017, 21, 1033–1070. [Google Scholar] [CrossRef]
- So, A.C.T.; Ho, T.Y.K.; Wong, J.C.F.; Lai, A.C.S.; Leung, W.K.; Kwan, J.S.H. Advancing the Use of Lidar in Geotechnical Applications in Hong Kong-A 10-Year Overview. In Proceedings of the 42nd Asian Conference on Remote Sensing, ACRS 2021, Can Tho City, Vietnam, 22–24 November 2021. [Google Scholar]
- Lapenna, V.; Perrone, A. Time-lapse electrical resistivity tomography (TL-ERT) for landslide monitoring: Recent advances and future directions. Appl. Sci. 2022, 12, 1425. [Google Scholar] [CrossRef]
- Breglio, G.; Bernini, R.; Berruti, G.M.; Bruno, F.A.; Buontempo, S.; Campopiano, S.; Catalano, E.; Consales, M.; Coscetta, A.; Cutolo, A.; et al. Innovative Photonic Sensors for Safety and Security, Part III: Environment, Agriculture and Soil Monitoring. Sensors 2023, 23, 3187. [Google Scholar] [CrossRef] [PubMed]
- Huang, G.; Du, S.; Wang, D. GNSS techniques for real-time monitoring of landslides: A review. Satell. Navig. 2023, 4, 5. [Google Scholar] [CrossRef]
- Auflič, M.j.; Herrera, G.; Mateos, R.M.; Poyiadji, E.; Quental, L.; Severine, B.; Peternel, T.; Podolski, L.; Calcaterra, S.; Kociu, A.; et al. Landslide monitoring techniques in the Geological Surveys of Europe. Landslides 2023, 20, 951–965. [Google Scholar] [CrossRef]
- Wuni, I.Y.; Shen, G.Q. Critical success factors for modular integrated construction projects: A review. Build. Res. Inf. 2020, 48, 763–784. [Google Scholar] [CrossRef]
- Yin, X.; Liu, H.; Chen, Y.; Al-Hussein, M. Building information modelling for off-site construction: Review and future directions. Autom. Constr. 2019, 101, 72–91. [Google Scholar] [CrossRef]
- Alshami, A.; Elsayed, M.; Ali, E.; Eltoukhy, A.E.E.; Zayed, T. Harnessing the Power of ChatGPT for Automating Systematic Review Process: Methodology, Case Study, Limitations, and Future Directions. Systems 2023, 11, 351. [Google Scholar] [CrossRef]
- Zou, Y.; Zheng, C. A Scientometric analysis of predicting methods for identifying the environmental risks caused by landslides. Appl. Sci. 2022, 12, 4333. [Google Scholar] [CrossRef]
- Van Eck, N.J.; Waltman, L. VOSviewer: A computer program for bibliometric mapping. In Proceedings of the 12th International Conference on Scientometrics and Informetrics, Nancy, France, 14–17 July 2009; ISSI 2009. pp. 886–897. [Google Scholar]
- Moher, D.; Liberati, A.; Tetzlaff, J.; Altman, D.G. Preferred reporting items for systematic reviews and meta-analyses: The PRISMA statement. J. Clin. Epidemiol. 2009, 62, 1006–1012. [Google Scholar] [CrossRef] [PubMed]
- Wohlin, C. Guidelines for snowballing in systematic literature studies and a replication in software engineering. In ACM International Conference Proceeding Series; ACM: New York, NY, USA, 2014; pp. 1–10. [Google Scholar] [CrossRef]
- Giri, P.; Ng, K.; Phillips, W. Wireless sensor network system for landslide monitoring and warning. IEEE Trans. Instrum. Meas. 2018, 68, 1210–1220. [Google Scholar] [CrossRef]
- Giri, P.; Ng, K.; Phillips, W. Monitoring Soil Slide-Flow Using Wireless Sensor Network-Inertial Measurement Unit System. Geotech. Geol. Eng. 2022, 40, 367–381. [Google Scholar] [CrossRef]
- Seguí, C.; Veveakis, M. Continuous assessment of landslides by measuring their basal temperature. Landslides 2021, 18, 3953–3961. [Google Scholar] [CrossRef]
- Seguí, C.; Veveakis, M. Forecasting and mitigating landslide collapse by fusing physics-based and data-driven approaches. Geomech. Energy Environ. 2022, 32, 100412. [Google Scholar] [CrossRef]
- Huisman, J.A.; Hubbard, S.S.; Redman, J.D.; Annan, A.P. Measuring soil water content with ground penetrating radar: A review. Vadose Zone J. 2003, 2, 476–491. [Google Scholar] [CrossRef]
- Iai, S. Similitude for shaking table tests on soil-structure-fluid model in 1g gravitational field. Soils Found. 1989, 29, 105–118. [Google Scholar] [CrossRef]
- Babaeian, E.; Sadeghi, M.; Jones, S.B.; Montzka, C.; Vereecken, H.; Tuller, M. Ground, proximal, and satellite remote sensing of soil moisture. Rev. Geophys. 2019, 57, 530–616. [Google Scholar] [CrossRef]
- Zhang, L.; Cui, Y.; Zhu, H.; Wu, H.; Han, H.; Yan, Y.; Shi, B. Shear deformation calculation of landslide using distributed strain sensing technology considering the coupling effect. Landslides 2023, 20, 1583–1597. [Google Scholar] [CrossRef]
- Iverson, R.M. Scaling and design of landslide and debris-flow experiments. Geomorphology 2015, 244, 9–20. [Google Scholar] [CrossRef]
- Buurman, B.; Kamruzzaman, J.; Karmakar, G.; Islam, S. Low-power wide-area networks: Design goals, architecture, suitability to use cases and research challenges. IEEE Access 2020, 8, 17179–17220. [Google Scholar] [CrossRef]
- Ma, Y.; Li, F.; Wang, Z.; Zou, X.; An, J.; Li, B. Landslide assessment and monitoring along the Jinsha river, Southwest China, by combining Insar and GPS techniques. J. Sens. 2022, 2022, 9572937. [Google Scholar] [CrossRef]
- Dematteis, N.; Wrzesniak, A.; Allasia, P.; Bertolo, D.; Giordan, D. Integration of robotic total station and digital image correlation to assess the three-dimensional surface kinematics of a landslide. Eng. Geol. 2022, 303, 106655. [Google Scholar] [CrossRef]
- Huang, H.; Ju, S.; Duan, W.; Jiang, D.; Gao, Z.; Liu, H. Landslide Monitoring along the Dadu River in Sichuan Based on Sentinel-1 Multi-Temporal InSAR. Sensors 2023, 23, 3383. [Google Scholar] [CrossRef] [PubMed]
- Refice, A.; Spalluto, L.; Bovenga, F.; Fiore, A.; Miccoli, M.N.; Muzzicato, P.; Nitti, D.O.; Nutricato, R.; Pasquariello, G. Integration of persistent scatterer interferometry and ground data for landslide monitoring: The Pianello landslide (Bovino, Southern Italy). Landslides 2019, 16, 447–468. [Google Scholar] [CrossRef]
- Shirani, K.; Pasandi, M. Landslide monitoring and the inventory map validation by ensemble DInSAR processing of ASAR and PALSAR Images (Case Study: Doab-Samsami Basin in Chaharmahal and Bakhtiari Province, Iran). Geotech. Geol. Eng. 2021, 39, 1201–1222. [Google Scholar] [CrossRef]
- Rebmeister, M.; Auer, S.; Schenk, A.; Hinz, S. Geocoding of ground-based SAR data for infrastructure objects using the Maximum A Posteriori estimation and ray-tracing. ISPRS J. Photogramm. Remote Sens. 2022, 189, 110–127. [Google Scholar] [CrossRef]
- Mayr, A.; Rutzinger, M.; Bremer, M.; Oude Elberink, S.; Stumpf, F.; Geitner, C. Object-based classification of terrestrial laser scanning point clouds for landslide monitoring. Photogramm. Rec. 2017, 32, 377–397. [Google Scholar] [CrossRef]
- Jakopec, I.; Marendić, A.; Grgac, I. Accuracy Analysis of a New Data Processing Method for Landslide Monitoring Based on Unmanned Aerial System Photogrammetry. Sensors 2023, 23, 3097. [Google Scholar] [CrossRef] [PubMed]
- Casagli, N.; Tofani, V.; Ciampalini, A.; Raspini, F.; Lu, P.; Morelli, S. TXT-tool 2.039-3.1: Satellite remote sensing techniques for landslides detection and mapping. In Landslide Dynamics: ISDR-ICL Landslide Interactive Teaching Tools. Volume 1: Fundamentals, Mapping and Monitoring; Springer: Cham, Switzerland, 2018; pp. 235–254. [Google Scholar] [CrossRef]
- Zhu, Z.W.; Liu, D.Y.; Yuan, Q.Y.; Liu, B.; Liu, J.C. A novel distributed optic fiber transduser for landslides monitoring. Opt. Lasers Eng. 2011, 49, 1019–1024. [Google Scholar] [CrossRef]
- Allil, R.C.; Lima, L.A.; Allil, A.S.; Werneck, M.M. Fbg-based inclinometer for landslide monitoring in tailings dams. IEEE Sens. J. 2021, 21, 16670–16680. [Google Scholar] [CrossRef]
- Yang, Z.; Shao, W.; Qiao, J.; Huang, D.; Tian, H.; Lei, X.; Uchimura, T. A multi-source early warning system of MEMS based wireless monitoring for rainfall-induced landslides. Appl. Sci. 2017, 7, 1234. [Google Scholar] [CrossRef]
- Allasia, P.; Manconi, A.; Giordan, D.; Baldo, M.; Lollino, G. ADVICE: A new approach for near-real-time monitoring of surface displacements in landslide hazard scenarios. Sensors 2013, 13, 8285–8302. [Google Scholar] [CrossRef] [PubMed]
- Wang, B.C. A landslide monitoring technique based on dual-receiver and phase difference measurements. IEEE Geosci. Remote Sens. Lett. 2013, 10, 1209–1213. [Google Scholar] [CrossRef]
- Qiao, S.; Feng, C.; Yu, P.; Tan, J.; Uchimura, T.; Wang, L.; Tang, J.; Shen, Q.; Xie, J. Investigation on surface tilting in the failure process of shallow landslides. Sensors 2020, 20, 2662. [Google Scholar] [CrossRef] [PubMed]
- Ma, J.; Tang, H.; Hu, X.; Bobet, A.; Yong, R.; Ez Eldin, M.A. Model testing of the spatial–temporal evolution of a landslide failure. Bull. Eng. Geol. Environ. 2017, 76, 323–339. [Google Scholar] [CrossRef]
- Mucchi, L.; Jayousi, S.; Martinelli, A.; Caputo, S.; Intrieri, E.; Gigli, G.; Gracchi, T.; Mugnai, F.; Favalli, M.; Fornaciai, A.; et al. A flexible wireless sensor network based on ultra-wide band technology for ground instability monitoring. Sensors 2018, 18, 2948. [Google Scholar] [CrossRef]
- Pawłuszek, K.; Borkowski, A.; Tarolli, P. Towards the optimal Pixel size of dem for automatic mapping of landslide areas. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci.-ISPRS Arch. 2017, 42, 83–90. [Google Scholar] [CrossRef]
- Deng, L.; Yuan, H.; Chen, J.; Fu, M.; Chen, Y.; Li, K.; Yu, M.; Chen, T. Experimental Investigation on Integrated Subsurface Monitoring of Soil Slope Using Acoustic Emission and Mechanical Measurement. Appl. Sci. 2021, 11, 7173. [Google Scholar] [CrossRef]
- Hemalatha, T.; Ramesh, M.V.; Rangan, V.P. Effective and accelerated forewarning of landslides using wireless sensor networks and machine learning. IEEE Sens. J. 2019, 19, 9964–9975. [Google Scholar] [CrossRef]
- Zhang, C.C.; Zhu, H.H.; Liu, S.P.; Shi, B.; Zhang, D. A kinematic method for calculating shear displacements of landslides using distributed fiber optic strain measurements. Eng. Geol. 2018, 234, 83–96. [Google Scholar] [CrossRef]
- Zheng, Y.; Huang, D.; Shi, L. A new deflection solution and application of a fiber Bragg grating-based inclinometer for monitoring internal displacements in slopes. Meas. Sci. Technol. 2018, 29, 055008. [Google Scholar] [CrossRef]
- Zheng, Y.; Huang, D.; Zhu, Z.W.; Li, W.J. Experimental study on a parallel-series connected fiber-optic displacement sensor for landslide monitoring. Opt. Lasers Eng. 2018, 111, 236–245. [Google Scholar] [CrossRef]
- Aulakh, N.S.; Chhabra, J.K.; Singh, N.; Jain, S. Microbend resolution enhancing technique for fiber optic based sensing and monitoring of landslides. Exp. Tech. 2004, 28, 37–42. [Google Scholar] [CrossRef]
- Crawford, M.M.; Bryson, L.S.; Woolery, E.W.; Wang, Z. Long-term landslide monitoring using soil-water relationships and electrical data to estimate suction stress. Eng. Geol. 2019, 251, 146–157. [Google Scholar] [CrossRef]
- Setiono, A.; Qomaruddin Afandi, M.I.; Adinanta, H.; Rofianingrum, M.Y.; Suryadi Mulyanto, I.; Bayuwati, D.; Anwar, A.; Widiyatmoko, B. Wire Extensometer Based on Optical Encoder for Translational Landslide Measurement. Int. J. Adv. Sci. Eng. Inf. Technol. 2023, 13, 17–23. [Google Scholar] [CrossRef]
- wiel, G.; Guerriero, L.; Revellino, P.; Guadagno, F.M. A multi-module fixed inclinometer for continuous monitoring of landslides: Design, development, and laboratory testing. Sensors 2020, 20, 3318. [Google Scholar] [CrossRef]
- Schenato, L.; Palmieri, L.; Camporese, M.; Bersan, S.; Cola, S.; Pasuto, A.; Galtarossa, A.; Salandin, P.; Simonini, P. Distributed optical fibre sensing for early detection of shallow landslides triggering. Sci. Rep. 2017, 7, 14686. [Google Scholar] [CrossRef]
- Dunnicliff, J. Geotechnical Instrumentation for Monitoring Field Performance; John Wiley & Sons: Hoboken, NJ, USA, 1993. [Google Scholar]
- Sargand, S.M.; Sargent, L.; Farrington, S.P. Inclinometer-Time Domain Reflectometry Comparative Study; No. FHWA/OH-2004/010; Ohio Research Institute for Transportation and the Environment: Columbus, OH, USA, 2004. [Google Scholar]
- Ho, S.C.; Chen, I.H.; Lin, Y.S.; Chen, J.Y.; Su, M.B. Slope deformation monitoring in the Jiufenershan landslide using time domain reflectometry technology. Landslides 2019, 16, 1141–1151. [Google Scholar] [CrossRef]
- Chung, C.C.; Lin, C.P. A comprehensive framework of TDR landslide monitoring and early warning substantiated by field examples. Eng. Geol. 2019, 262, 105330. [Google Scholar] [CrossRef]
- Lin, C.P.; Tang, S.H.; Lin, W.C.; Chung, C.C. Quantification of cable deformation with time domain reflectometry—Implications to landslide monitoring. J. Geotech. Geoenvironmental. Eng. 2009, 135, 143–152. [Google Scholar] [CrossRef]
- Su, M.B.; Chen, I.H.; Liao, C.H. Using TDR cables and GPS for landslide monitoring in high mountain area. J. Geotech. Geoenvironmental Eng. 2009, 135, 1113–1121. [Google Scholar] [CrossRef]
- Wang, Y.L.; Shi, B.; Zhang, T.L.; Zhu, H.H.; Jie, Q.; Sun, Q. Introduction to an FBG-based inclinometer and its application to landslide monitoring. J. Civ. Struct. Health Monit. 2015, 5, 645–653. [Google Scholar] [CrossRef]
- Askarinejad, A.; Akca, D.; Springman, S.M. Precursors of instability in a natural slope due to rainfall: A full-scale experiment. Landslides 2018, 15, 1745–1759. [Google Scholar] [CrossRef]
- Liu, Z.; Cai, G.; Wang, J.; Liu, L.; Zhuang, H. Evaluation of mechanical and electrical properties of a new sensor-enabled piezoelectric geocable for landslide monitoring. Meas. J. Int. Meas. Confed. 2023, 211, 112667. [Google Scholar] [CrossRef]
- Chung, C.C.; Lin, C.P.; Ngui, Y.J.; Lin, W.C.; Yang, C.S. Improved technical guide from physical model tests for TDR landslide monitoring. Eng. Geol. 2022, 296, 106417. [Google Scholar] [CrossRef]
- Kane, W.F.; Beck, T.J.; Hughes, J.J. Applications of time domain reflectometry to landslide and slope monitoring. In Proceedings of the Second International Symposium and Workshop on Time Domain Reflectometry for Innovative Geotechnical Applications, Evanston, IL, USA, 5–7 September 2021; Infrastructure Technology Institute at Northwestern University: Evanston, IL, USA, 2001; pp. 305–314. [Google Scholar]
- Chung, C.C.; Tran, V.N.; Azhar, M. Guidelines from direct shear modeling in centrifuge for TDR landslide monitoring. Eng. Geol. 2022, 310, 106870. [Google Scholar] [CrossRef]
- Zheng, Y.; Zhu, Z.W.; Li, W.J.; Gu, D.M.; Xiao, W. Experimental research on a novel optic fiber sensor based on OTDR for landslide monitoring. Measurement: J. Int. Meas. Confed. 2019, 148, 106926. [Google Scholar] [CrossRef]
- Dixon, N.; Smith, A.; Spriggs, M.; Ridley, A.; Meldrum, P.; Haslam, E. Stability monitoring of a rail slope using acoustic emission. Proc. Inst. Civ. Eng.-Geotech. Eng. 2015, 168, 373–384. [Google Scholar] [CrossRef]
- Smith, A.; Moore, I.D.; Dixon, N. Acoustic emission sensing of pipe–soil interaction: Full-scale pipelines subjected to differential ground movements. J. Geotech. Geoenvironmental Eng. 2019, 145, 04019113. [Google Scholar] [CrossRef]
- Dennis, N.D.; Ooi, C.W.; Wong, V.H. Estimating movement of shallow slope failures using time domain reflectometry. In Proceedings of the TDR Conference, Lafayette, IN, USA, 29 October–1 December 2006; Paper ID 41. Purdue University: West Lafayette, IN, USA, 2006; p. 16. [Google Scholar]
- Ivanov, V.; Longoni, L.; Ferrario, M.; Brunero, M.; Arosio, D.; Papini, M. Applicability of an interferometric optical fibre sensor for shallow landslide monitoring–Experimental tests. Eng. Geol. 2021, 288, 106128. [Google Scholar] [CrossRef]
- Zheng, Y.; Zhu, Z.W.; Xiao, W.; Gu, D.M.; Deng, Q.X. Investigation of a quasi-distributed displacement sensor using the macro-bending loss of an optical fiber. Opt. Fiber Technol. 2020, 55, 102140. [Google Scholar] [CrossRef]
- Zheng, Y.; Liu, D.Y.; Zhu, Z.W.; Liu, H.L.; Liu, B. Experimental study on slope deformation monitoring based on a combined optical fiber transducer. J. Sens. 2017, 2017, 7936089. [Google Scholar] [CrossRef]
- Zhu, Z.W.; Yuan, Q.Y.; Liu, D.Y.; Liu, B.; Liu, J.C.; Luo, H. New improvement of the combined optical fiber transducer for landslide monitoring. Nat. Hazards Earth Syst. Sci. 2014, 14, 2079–2088. [Google Scholar] [CrossRef]
- Yu, Z.; Dai, H.; Zhang, Q.; Zhang, M.; Liu, L.; Zhang, J.; Jin, X. High-resolution distributed strain sensing system for landslide monitoring. Optik 2018, 158, 91–96. [Google Scholar] [CrossRef]
- Minardo, A.; Zeni, L.; Coscetta, A.; Catalano, E.; Zeni, G.; Damiano, E.; De Cristofaro, M.; Olivares, L. Distributed optical fiber sensor applications in geotechnical monitoring. Sensors 2021, 21, 7514. [Google Scholar] [CrossRef]
- Zeng, B.; Zheng, Y.; Yu, J.; Yang, C. Deformation calculation method based on FBG technology and conjugate beam theory and its application in landslide monitoring. Opt. Fiber Technol. 2021, 63, 102487. [Google Scholar] [CrossRef]
- Zheng, Y.; Zhu, Z.W.; Deng, Q.X.; Xiao, F. Theoretical and experimental study on the fiber Bragg grating-based inclinometer for slope displacement monitoring. Opt. Fiber Technol. 2019, 49, 28–36. [Google Scholar] [CrossRef]
- Li, F.; Zhao, W.; Xu, H.; Wang, S.; Du, Y. A highly integrated BOTDA/XFG sensor on a single fiber for simultaneous multi-parameter monitoring of slopes. Sensors 2019, 19, 2132. [Google Scholar] [CrossRef]
- Guo, T.T.; Yuan, W.Q.; Wu, L.H. Experimental research on distributed fiber sensor for sliding damage monitoring. Opt. Lasers Eng. 2009, 47, 156–160. [Google Scholar] [CrossRef]
- Jeong, S.; Ko, J.; Kim, J. The effectiveness of a wireless sensor network system for landslide monitoring. IEEE Access 2019, 8, 8073–8086. [Google Scholar] [CrossRef]
- Abraham, M.T.; Satyam, N.; Bulzinetti, M.A.; Pradhan, B.; Pham, B.T.; Segoni, S. Using field-based monitoring to enhance the performance of rainfall thresholds for landslide warning. Water 2020, 12, 3453. [Google Scholar] [CrossRef]
- Abraham, M.T.; Satyam, N.; Pradhan, B.; Alamri, A.M. IoT-based geotechnical monitoring of unstable slopes for landslide early warning in the Darjeeling Himalayas. Sensors 2020, 20, 2611. [Google Scholar] [CrossRef] [PubMed]
- Xie, J.; Uchimura, T.; Huang, C.; Maqsood, Z.; Tian, J. Experimental study on the relationship between the velocity of surface movements and tilting rate in pre-failure stage of rainfall-induced landslides. Sensors 2021, 21, 5988. [Google Scholar] [CrossRef] [PubMed]
- Gian Quoc, A.; Nguyen Dinh, C.; Tran Duc, N.; Tran Duc, T.; Kumbesan, S. Wireless technology for monitoring site-specific landslide in Vietnam. Int. J. Electr. Comput. Eng. 2018, 8, 4448–4455. [Google Scholar] [CrossRef]
- Chen, Y.; Irfan, M.; Uchimura, T.; Cheng, G.; Nie, W. Elastic wave velocity monitoring as an emerging technique for rainfall-induced landslide prediction. Landslides 2018, 15, 1155–1172. [Google Scholar] [CrossRef]
- Chen, Y.; Irfan, M.; Uchimura, T.; Wu, Y.; Yu, F. Development of elastic wave velocity threshold for rainfall-induced landslide prediction and early warning. Landslides 2019, 16, 955–968. [Google Scholar] [CrossRef]
- Chen, Y.; Irfan, M.; Uchimura, T.; Zhang, K. Feasibility of using elastic wave velocity monitoring for early warning of rainfall-induced slope failure. Sensors 2018, 18, 997. [Google Scholar] [CrossRef]
- Wielandt, S.; Uhlemann, S.; Fiolleau, S.; Dafflon, B. Low-power, flexible sensor arrays with solderless board-to-board connectors for monitoring soil deformation and temperature. Sensors 2022, 22, 2814. [Google Scholar] [CrossRef]
- Sheikh, M.R.; Nakata, Y.; Shitano, M.; Kaneko, M. Rainfall-induced unstable slope monitoring and early warning through tilt sensors. Soils Found. 2021, 61, 1033–1053. [Google Scholar] [CrossRef]
- Ramesh, M.V.; Rangan, V.P. Data reduction and energy sustenance in multisensor networks for landslide monitoring. IEEE Sens. J. 2014, 14, 1555–1563. [Google Scholar] [CrossRef]
- Prabha, R.; Ramesh, M.V.; Rangan, V.P.; Ushakumari, P.V.; Hemalatha, T. Energy efficient data acquisition techniques using context aware sensing for landslide monitoring systems. IEEE Sens. J. 2017, 17, 6006–6018. [Google Scholar] [CrossRef]
- Askarinejad, A. A method to locate the slip surface and measuring subsurface deformations in slopes. In Proceedings of the Fourth International Young Geotechnical Engineers Conference (4iYGEC), Alexandria, Egypt, 3–6 October 2009; The Egyptian Geotechnical Society: Cairo, Egypt, 2009; pp. 171–174. [Google Scholar]
- Askarinejad, A.; Springman, S.M. A novel technique to monitor subsurface movements of landslides. Can. Geotech. J. 2018, 55, 620–630. [Google Scholar] [CrossRef]
- Kotta, H.Z.; Rantelobo, K.; Tena, S.; Klau, G. Wireless sensor network for landslide monitoring in Nusa Tenggara Timur. TELKOMNIKA (Telecommunication Computing Electronics and Control). J. Mt. Sci. 2011, 9, 9–18. [Google Scholar] [CrossRef]
- Yunus, M.A.M.; Ibrahim, S.; Khairi, M.T.M.; Faramarzi, M. The application of WiFi-based wireless sensor network (WSN) in hill slope condition monitoring. J. Teknol. 2015, 73, 75–84. [Google Scholar]
- Tao, Z.; Wang, Y.; Zhu, C.; Xu, H.; Li, G.; He, M. Mechanical evolution of constant resistance and large deformation anchor cables and their application in landslide monitoring. Bull. Eng. Geol. Environ. 2019, 78, 4787–4803. [Google Scholar] [CrossRef]
- He, M.C.; Tao, Z.G.; Zhang, B. Application of remote monitoring technology in landslides in the Luoshan mining area. Min. Sci. Technol. 2009, 19, 609–614. [Google Scholar] [CrossRef]
- Li, M.; Cheng, W.; Chen, J.; Xie, R.; Li, X. A high performance piezoelectric sensor for dynamic force monitoring of landslide. Sensors 2017, 17, 394. [Google Scholar] [CrossRef]
- Latupapua, H.; Latupapua, A.; Wahab, A.; Alaydrus, M. Wireless sensor network design for earthquake’s and landslide’s early warnings. Indones. J. Electr. Eng. Comput. Sci. 2018, 11, 437–445. [Google Scholar] [CrossRef]
- Hu, Y.; Zhou, J.; Li, J.; Ma, J.; Hu, Y.; Lu, F.; Cheng, T. Tipping-bucket self-powered rain gauge based on triboelectric nanogenerators for rainfall measurement. Nano Energy 2022, 98, 107234. [Google Scholar] [CrossRef]
- Ferraz, E.S.B. Determining Water Content and Bulk Density of Soil by Gamma Ray Attenuation Methods; Elsever: Amsterdam, The Netherlands, 1979. [Google Scholar]
- Priestley, C.H.B.; Taylor, R.J. On the assessment of surface heat flux and evaporation using large-scale parameters. Mon. Weather. Rev. 1972, 100, 81–92. [Google Scholar] [CrossRef]
- Leone, M.; Principe, S.; Consales, M.; Parente, R.; Laudati, A.; Caliro, S.; Cutolo, A.; Cusano, A. Fiber optic thermo-hygrometers for soil moisture monitoring. Sensors 2017, 17, 1451. [Google Scholar] [CrossRef] [PubMed]
- Wicki, A.; Hauck, C. Monitoring critically saturated conditions for shallow landslide occurrence using electrical resistivity tomography. Vadose Zone J. 2022, 21, e20204. [Google Scholar] [CrossRef]
- Reynolds, S.G. The gravimetric method of soil moisture determination Part IA study of equipment, and methodological problems. J. Hydrol. 1970, 11, 258–273. [Google Scholar] [CrossRef]
- Xiaochun, L.; Xue, C.; Bobo, X.; Bin, T.; Xiaolong, T.; Zhigang, T. Bi-LSTM-GPR algorithms based on a high-density electrical method for inversing the moisture content of landslide. Bull. Eng. Geol. Environ. 2022, 81, 491. [Google Scholar] [CrossRef]
- Lo, W.C.; Yeh, C.L.; Tsai, C.T. Effect of soil texture on the propagation and attenuation of acoustic wave at unsaturated conditions. J. Hydrol. 2007, 338, 273–284. [Google Scholar] [CrossRef]
- Kong, Q.; Chen, H.; Mo, Y.L.; Song, G. Real-time monitoring of water content in sandy soil using shear mode piezoceramic transducers and active sensing—A feasibility study. Sensors 2017, 17, 2395. [Google Scholar] [CrossRef]
- Pichorim, S.F.; Gomes, N.J.; Batchelor, J.C. Two solutions of soil moisture sensing with RFID for landslide monitoring. Sensors 2018, 18, 452. [Google Scholar] [CrossRef]
- Crawford, M.M.; Bryson, L.S. Assessment of active landslides using field electrical measurements. Eng. Geol. 2018, 233, 146–159. [Google Scholar] [CrossRef]
- Binley, A. 11.08-Tools and Techniques: Electrical Methods. In Treatise on Geophysics, 2nd ed.; Elsevier: Amsterdam, The Netherlands, 2015; pp. 233–259. [Google Scholar] [CrossRef]
- Cheng, Q.; Tao, M.; Chen, X.; Binley, A. Evaluation of electrical resistivity tomography (ERT) for mapping the soil–rock interface in karstic environments. Environ. Earth Sci. 2019, 78, 439. [Google Scholar] [CrossRef]
- Chu, M.; Patton, A.; Roering, J.; Siebert, C.; Selker, J.; Walter, C.; Udell, C. SitkaNet: A low-cost, distributed sensor network for landslide monitoring and study. HardwareX 2021, 9, e00191. [Google Scholar] [CrossRef] [PubMed]
- Marino, P.; Roman Quintero, D.C.; Santonastaso, G.F.; Greco, R. Prototype of an IoT-based low-cost sensor network for the hydrological monitoring of landslide-prone areas. Sensors 2023, 23, 2299. [Google Scholar] [CrossRef] [PubMed]
- Wang, Y.; Liu, Z.; Wang, D.; Li, Y.; Yan, J. Anomaly detection and visual perception for landslide monitoring based on a heterogeneous sensor network. IEEE Sens. J. 2017, 17, 4248–4257. [Google Scholar] [CrossRef]
- Irfan, M.; Uchimura, T.; Chen, Y. Effects of soil deformation and saturation on elastic wave velocities in relation to prediction of rain-induced landslides. Eng. Geol. 2017, 230, 84–94. [Google Scholar] [CrossRef]
- Michlmayr, G.; Or, D.; Cohen, D. Fiber bundle models for stress release and energy bursts during granular shearing. Phys. Rev. E-Stat. Nonlinear Soft Matter Phys. 2012, 86, 061307. [Google Scholar] [CrossRef]
- Zhang, S.; Wang, K.; Hu, K.; Xu, H.; Xu, C.; Liu, D.; Lv, J.; Wei, F. Model test: Infrasonic features of porous soil masses as applied to landslide monitoring. Eng. Geol. 2020, 265, 105454. [Google Scholar] [CrossRef]
- Motakabber, S.M.A.; Ibrahimy, M.I. An approach of differential capacitor sensor for landslide monitoring. Int. J. Geomate 2015, 9, 1534–1537. [Google Scholar] [CrossRef]
- Lin, Z.; He, Q.; Xiao, Y.; Zhu, T.; Yang, J.; Sun, C.; Zhou, Z.; Zhang, H.; Shen, Z.; Yang, J.; et al. Flexible timbo-like triboelectric nanogenerator as self-powered force and bend sensor for wireless and distributed landslide monitoring. Adv. Mater. Technol. 2018, 3, 1800144. [Google Scholar] [CrossRef]
- Kuang, K.S.C. Wireless chemiluminescence-based sensor for soil deformation detection. Sens. Actuators A Phys. 2018, 269, 70–78. [Google Scholar] [CrossRef]
- Yueshun, H.; Zhang, W. The reseach on wireless sensor network for landslide monitoring. Int. J. Smart Sens. Intell. Syst. 2013, 6, 867. [Google Scholar] [CrossRef]
- Van Khoa, V.; Takayama, S. Wireless sensor network in landslide monitoring system with remote data management. Measurement: J. Int. Meas. Confed. 2018, 118, 214–229. [Google Scholar] [CrossRef]
- Ragnoli, M.; Leoni, A.; Barile, G.; Ferri, G.; Stornelli, V. LoRa-Based Wireless Sensors Network for Rockfall and Landslide Monitoring: A Case Study in Pantelleria Island with Portable LoRaWAN Access. J. Low Power Electron. Appl. 2022, 12, 47. [Google Scholar] [CrossRef]
- Kumar, S.; Duttagupta, S.; Rangan, V.P.; Ramesh, M.V. Reliable network connectivity in wireless sensor networks for remote monitoring of landslides. Wirel. Netw. 2020, 26, 2137–2152. [Google Scholar] [CrossRef]
- Xu, Y.; Chen, Q.; Tian, D.; Zhang, Y.; Li, B.; Tang, H. Selection of high transfer stability and optimal power-efficiency tradeoff with respect to distance region for underground wireless power transfer systems. J. Power Electron. 2020, 20, 1662–1671. [Google Scholar] [CrossRef]
- Sharma, R.; Vashisht, V.; Singh, U. WOATCA: A secure and energy aware scheme based on whale optimisation in clustered wireless sensor networks. IET Commun. 2020, 14, 1199–1208. [Google Scholar] [CrossRef]
- Bagwari, S.; Roy, A.; Gehlot, A.; Singh, R.; Priyadarshi, N.; Khan, B. LoRa Based Metrics Evaluation for Real-Time Landslide Monitoring on IoT Platform. IEEE Access 2022, 10, 46392–46407. [Google Scholar] [CrossRef]
- Wang, H.; Zhuo, T.; Zhong, P.; Wei, C.; Zou, D.; Zhong, Y. A novel wireless underground transceiver for landslide internal parameter monitoring based on magnetic induction. Int. J. Circuit Theory Appl. 2021, 49, 1549–1558. [Google Scholar] [CrossRef]
- Blahůt, J.; Balek, J.; Eliaš, M.; Meletlidis, S. 3D Dilatometer time-series analysis for a better understanding of the dynamics of a giant slow-moving landslide. Appl. Sci. 2020, 10, 5469. [Google Scholar] [CrossRef]
- Sumathi, M.S.; Anitha, G.S. Link Aware Routing Protocol for Landslide Monitoring Using Efficient Data Gathering and Handling System. Wirel. Pers. Commun. 2020, 112, 2663–2684. [Google Scholar] [CrossRef]
- de Souza, F.T.; Ebecken, N.F. A data based model to predict landslide induced by rainfall in Rio de Janeiro city. Geotech. Geol. Eng. 2012, 30, 85–94. [Google Scholar] [CrossRef]
- Shentu, N.; Yang, J.; Li, Q.; Qiu, G.; Wang, F. Research on the Landslide Prediction Based on the Dual Mutual-Inductance Deep Displacement 3D Measuring Sensor. Appl. Sci. 2022, 13, 213. [Google Scholar] [CrossRef]
- Wang, C.; Zhao, Y. Time Series Prediction Model of Landslide Displacement Using Mean-Based Low-Rank Autoregressive Tensor Completion. Appl. Sci. 2023, 13, 5214. [Google Scholar] [CrossRef]
- Li, Z.; Cheng, P.; Zheng, J. Prediction of time to slope failure based on a new model. Bull. Eng. Geol. Environ. 2021, 80, 5279–5291. [Google Scholar] [CrossRef]
- Long, J.; Li, C.; Liu, Y.; Feng, P.; Zuo, Q. A multi-feature fusion transfer learning method for displacement prediction of rainfall reservoir-induced landslide with step-like deformation characteristics. Eng. Geol. 2022, 297, 106494. [Google Scholar] [CrossRef]
- Streiner, D.L.; Norman, G.R. “Precision” and “accuracy”: Two terms that are neither. J. Clin. Epidemiol. 2006, 59, 327–330. [Google Scholar] [CrossRef]
- Bridgman, P.W. Dimensional Analysis; Yale University Press: London, UK, 1922; p. viii+112. [Google Scholar]
- Molfino, R.M.; Razzoli, R.P.; Zoppi, M. Autonomous drilling robot for landslide monitoring and consolidation. Autom. Constr. 2008, 17, 111–121. [Google Scholar] [CrossRef]
- Patané, L. Bio-inspired robotic solutions for landslide monitoring. Energies 2019, 12, 1256. [Google Scholar] [CrossRef]
- Hasan, M.F.R.; Salimah, A.; Susilo, A.; Rahmat, A.; Nurtanto, M.; Martina, N. Identification of landslide area using geoelectrical resistivity method as disaster mitigation strategy. Int. J. Adv. Sci. Eng. Inf. Technol. 2022, 12, 1484–1490. [Google Scholar] [CrossRef]


































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Study | Year | Approach | Content |
|---|---|---|---|
| Angeli et al. [2] | 2000 | Systematic | Discussing the management, problems, and solutions of different systems. |
| Shamshi [13] | 2004 | Systematic | Landslide-monitoring instruments were reviewed briefly. |
| Eyo et al. [14] | 2014 | Systematic | Applications of low-cost GPS tools. |
| De Graff [1] | 2011 | Systematic | Illustrating how to obtain and build a better monitoring system. |
| Chae et al. [15] | 2017 | Systematic | Landslide prediction, monitoring (remote sensing and in situ based), and early warning. |
| So et al. [16] | 2021 | Systematic | LiDAR applications in Hong Kong. |
| Lapenna & Perrone [17] | 2022 | Systematic | Discussing time-lapse electrical resistivity tomography applications. |
| Breglio et al. [18] | 2023 | Systematic | The uses of photonic technology for monitoring deformation (slopes and tunnels), temperature, and soil humidity for agricultural soil. |
| Huang et al. [19] | 2023 | Systematic | Real-time monitoring using GNSS. |
| Auflič et al. [20] | 2023 | Bibliometric | Landslide-monitoring techniques based on questionnaire analysis. |
| Organization | Country | Articles | Citations |
|---|---|---|---|
| School of Civil Engineering of Chongqing University | China | 5 | 76 |
| Key Laboratory of New Technology for Construction of Cities in Mountain Areas, Chongqing University | China | 4 | 67 |
| Dept. of Civil Engineering/Research Center for Hazard Mitigation and Prevention, National Central University, Zhongda | Taiwan | 3 | 28 |
| Department of Civil Engineering, University of Tokyo | Japan | 2 | 57 |
| State Key Laboratory of Hydroscience and Engineering, Tsinghua University, Beijing | China | 2 | 57 |
| Authors | Documents | Citations |
|---|---|---|
| Giri P.; Ng K.; Phillips W. | 3 [8,28,29] | 62 |
| Seguí, C. and Veveakis, M. | 2 [30,31] | 8 |
| Huisman, J. A., Hubbard, S. S., Redman, J. D. and Annan, A. P. | 1 [32] | 728 |
| Iai Susumu | 1 [33] | 595 |
| Babaeian, E., Sadeghi, M., Jones, S. B., Montzka, C., Vereecken, H. and Tuller, M. | 1 [34] | 230 |
| Study | Journal | Citation | Normalized Citations |
|---|---|---|---|
| Babaeian et al. [34] | Reviews of Geophysics | 230 | 6.50 |
| Zhang et al. [35] | Landslides | 7 | 4.81 |
| Chae et al. [15] | Geosciences Journal | 199 | 4.60 |
| Iverson [36] | Geomorphology | 214 | 4.33 |
| Buurman et al. [37] | IEEE Access | 60 | 3.48 |
| Case | Wi-GIM | RTS | GB-In-SAR |
|---|---|---|---|
| Cost (area = 100,000 m2) | EUR 5220 | EUR 18,150 | EUR 58,100 |
| Environmental impact | Good | Very good | Very good |
| Installation effort | Excellent | Good | Very good |
| Influence of rain/snow | Very good/very good | Good/good | Poor/very good |
| Completeness of measurement | Very good | Excellent | Excellent |
| Durability | Fair | Good | Excellent |
| Precision | Fair (2–3 cm) | Very good | Excellent |
| Maximum range | Fair | Excellent | Excellent |
| System | Range | Precision | Displacement | Cost (USD) [71] |
|---|---|---|---|---|
| GPS | - | 3 mm | Surface | High (6000–10,000/station) |
| Extensometer [63] | Up to 1000 mm | 0.011 ± 0.0083 mm | Surface | High (600–1500/station) |
| Inclinometer | <50 mm [79] | ±0.01 mm per 500 mm | Deep | High (600/sensor) |
| TDR [68,81] | 60 mm (210-mρ, reflection coefficient,) | 0.5 mm [77] | Deep | Low (6–10/m) |
| AE | >500 mm [56] | 0.0001 mm/h to 400 mm/h [80] | Deep | Low [56] |
| Method | Initial Accuracy (mm) | Maximum Displacement (mm) | Spatial Resolution | Dynamic Range | Loading Direction | Sliding Location | Price (USD/m) |
|---|---|---|---|---|---|---|---|
| IN [66,67,68] | 0.01 | <50 [79] | 500 mm | - | Yes | Yes | 30 [47] |
| TDR [68,77,81] | 0.5 mm | 60 (210 mρ) | 50 mm | 0–20.4 [47] | Yes | Yes | 13.5 |
| SOF [91] | 0.3 | 3.6 | - | 0–3.3 | No | No | 0.03 |
| COFT [47,78,84,85] | 0.98 | 36 | - | 0–34 | Yes | Yes | 0.45 |
| PSCFODS [58,59,83] | 0.98 | 36 | 250 mm | - | Yes | Yes | 0.2 |
| FBG [48,58,59,89] | 0.02 | 50 | 100 mm | - | Yes | Yes | - |
| Class | Per h (mm) | Per Day (mm) | Per Month | ||
|---|---|---|---|---|---|
| Rainy Days (Days) | Total Rainfall (mm) | Cumulative Rainfall (mm) | |||
| Very small | <1 | <5 | 5–6 | 10-15 | 10-15 |
| Small | 1–5 | 5–20 | 6–7 | 60–70 | 70–85 |
| Moderate | 5–10 | 21–50 | 6–7 | 180–210 | 250–295 |
| High | 10–20 | 51–100 | 2–4 | 150–250 | 400–545 |
| Very high | >20 | >100 | 1–2 | 110–300 | 510–845 |
| Threshold 1 | Threshold 2 | Threshold 3 | Threshold 4 | |||||
|---|---|---|---|---|---|---|---|---|
| Sampling rate | 1/s | 1/h | 1/s | 1/h | 1/s | 1/h | 1/s | 1/h |
| Battery lifetime | 17 min | 26.29 days | 9 min | 14 days | 5 min | 6 days | 3.8 min | 4.5 days |
| Cost (USD), Kerala, India | 150 | 380 | 1050 to 3720 | 2550 to 5220 | ||||
| Prediction accuracy (%) | 50 | 70 | 80 | >80 | ||||
| Prediction thresholds | Rainfall (R) (120 mm/day) | R and subsurface moisture state (Wc) | R, Wc, and pore water pressure (PWP) | R, Wc, PWP, and soil movement | ||||
| Parameter | Length, Cohesion, and Elastic Modulus | Density, Friction Angle, and Gravity | Permeability |
|---|---|---|---|
| Scale factor | λ | 1 | λ0.5 |
| Study | Adopted Monitoring System | Model Dimensions (B × L × H) cm | Soil Type and Thickness | (λ) |
|---|---|---|---|---|
| Schenato et al. [65] | Strain sensor: BRUsens© strain v9 cable (Brugg Kabel AG, Brugg, Switzerland); measurement interval of 1% strain; spatial resolution of 10 mm. Optical frequency domain reflectometer: OBR4600 from Luna Innovation Inc. (University of Padova, Padova, Italy). to measure the strain. Tensiometers: to measure pore water pressure. Water content reflectometer: to measure volumetric soil moisture. Temperature probes: to measure soil temperature. Tipping bucket flow gauges: to measure rainfall intensity. | (200 × 600 × 350) Slope angle 31.14° | A shallow sand layer (60 cm) overlies the clay layer. | – |
| Ma et al. [53] | 3D laser scanner: RIEGL VZ–400 for continuous surface movement measurement. Video camera: for continuous surface movement measurement. Earth PC: Model XTR–2030 to measure earth pressure; capacity of (0–500) kPa. TIR camera: FLIR SC660 to measure surface temperature; temperature sensitivity of 0.03 °C. | (90 × 200 × 74) Varied slope angle | A 4 cm thick sliding layer. Stiff material of clay, sand, bentonite, and water. The soft material of clay, glass beads, and water. | 40 (1 g) |
| Zheng et al. [84] | Combined optic fiber transducer (COFT): the minimum error was achieved using a cement mortar ratio of 1:5 and EPS material (average value of 4.12%). Initial measurement of 1 mm. Maximum sliding distance of 26.5 mm. Dynamic range of 0–23.2 mm. Unit price of 0.2 USD/m. | (200 × 450 × 160) Slope angle 60° | A predefined circular failure surface. A mixture of clay and river sand. | – |
| Giri et al. [8,29] | 3–axis accelerometers | (149 × 183 × 30) Slope angle 35° | Test 1: 12.7 cm sand underlying a 6.35 layer of sandy gravelly clay. Test 2: 25.4 cm of homogeneous sand slope. | – |
| BNO055 sensor devices (IMU sensors) with 3-axis accelerometers and 3-axis gyroscopes to measure gravitational acceleration, linear acceleration, and angular velocity. Suitable for translational landslides. | ||||
| Askarinejad & Springman [105] | SDS sensor: developed at the Institute for Geotechnical Engineering at ETH Zurich to measure horizontal displacement. Initial measurement is <1 mm; data frequency 10 Hz; bending stiffness less than PVC inclinometer by 300 times. Suitable for sand and silt rapid landslides. | (100× 100 × 750) | A predefined forced failure surface using a hydraulic jack. Poorly graded sand. | – |
| Kuang [133] | Glowstick (chemiluminescence) | (80 × 80 × 80) | A predefined failure surfaces at the mid-elevation. Test 1: the soil was sand. Test 2: the topsoil was clay, and the bottom was sand. | – |
| Powerless and low-cost system to produce early signs based on soil deformations. Extremely sensitive to small motions in the mm range. | ||||
| Chen et al. [97,99] | Soil moisture sensors: EC–5 by Decagon Devices, Inc. (Pullman, WA, USA), to measure volumetric water content; data frequency of 1 s. Tiltmeter sensor: microelectromechanical system (MEMS) sensor to measure tilt angle; data frequency of 1 s. The elastic wave monitoring system: consists of an exciter, receiver, microcontroller, and data acquisition unit; the exciter is a solenoid (ZHO–1040 L/S by Zonhen Electric Appliances HK Co, Ltd., Shenzhen, China); the receiver is a piezoelectric vibration sensor (VS–BV201 by NEC TOKIN Corporation, Sendai, Japan). Artificial rainfall: spray nozzle (SSXP series by H. IKEUCHI & Co., Ltd., Wuhan, China). This system is suitable for shallow infinite landslides. | (1) Small, fixed test (30 × 70 × 40) with slope angle 45°; (2) small test with varied slope angle; (3) large-scale model (– ×790 × 500) with slope angle 45° | Brown natural sand. Three different thicknesses of 5, 10, and 15 cm vertically over the base layer for small tests. Soil thickness of 1 m vertically over concrete for large tests. | – |
| Chen et al. [98] | Adopted centrifuge tests using the same setup as the small fixed and varied tests listed above by Chen et al. [97,99] | 50 g | ||
| Zhang et al. [130] | Infrasound–mechanics system | Small-scale model Slope angle 28° | The failure surface was forced using a hydraulic jack. Seven soil samples (fine sandstone, dolomitic limestone, calcareous mudstone, marl, purple mudstone, calcareous shale, and purple mudstone) with different densities and moistures were adopted. | – |
| Consists of an infrasound sensor (IDS2016), steel tube, pressure sensor, signal transmission line, and signal analysis appliance. IDS2016 infrasonic sensor is small and cost-effective and has the following characteristics: (1) extremely sensitive (50 mV/Pa) to monitor weak signals and (2) high measuring range (0.5 to 200 Hz) to cover a wide frequency range. The seal tube was inserted to a depth of 20 cm from the bottom of the sliding mass to minimize the external noise from the soil mass around the failure surface. ISDAS2016 acquisition device has the following characteristics: (1) low noise, (2) low power consumption, (3) high synchronization accuracy, and (4) sampling rate of 100 Hz. | ||||
| Qiao et al. [52] | Tilt sensor: MEMS wireless sensor with a nominal resolution of (0.0025° = 0.04 mm/m); different rod lengths were used (50 mm, 300 mm) through field tests with artificial rainfall. | (45 × 116.5 × 38) Slope angle 43° | Silica sand was used. Test 1: rainfall triggering with fixed slope angle. Test 2: variable slope angle with a defined circular slip surface. | – |
| Ivanov et al. [82] | TDR: to measure water content. Camera: to visually record the landslide. C–OFTDR—Setup 1: the fibers were perpendicular to sliding directions; setup 2: the fibers were parallel to the sliding direction. Sampling frequency of 20k sample/s; temporal resolution of 15 min; cost approximately EUR 5k. This sensor device is unable to pinpoint the exact location of strain along the line. | (80 × 200 ×−) Modifiable angle up to 45° | Homogeneous fine sand with a thickness of 15 cm to simulate shallow landslide. Artificial rainfall was adopted as external triggering. | Temporal scale of 10 |
| Minardo et al. [87] | Tensiometer: to measure soil matric suction. Laser sensor: to measure soil deformation. Camera: to retrieve data using particle image velocimetry (PIV). BOFDA: to measure soil strain; spatial resolution of 5 cm; temporal resolution of 3 min. | (50 ×110 ×−) Slope angle 35° | Cohesionless soil with an internal friction angle of 38°. Soil thickness of 13 cm to simulate shallow landslide. | – |
| Xie et al. [95] | Tilt meter: to measure soil tilting; accuracy of 0.1 degrees. Extensometer: to measure soil displacement; accuracy of 0.1 mm. Digital camera: to monitor soil movement at marked points. | Model 1: (45 × 116.5 × 38); slope angle 40° Model 2: (−× 70 × 30); slope angle 39° | Sandy soil. Model 1: the failure surface was predefined as circular. Model 2: artificial rainfall was applied as external triggering. | – |
| Xiaochun et al. [118] | High–density electrical instrument: to measure the resistivity with DZD–8 multifunction full waveform DC electrical apparatus (Chongqing Geological Instrument Factory, Chongqing, China). A total of 30 high–density copper electrodes were set on the surface of the model, and the distance between the electrodes was 20 cm. Temporal resolution of 30 min. Soil moisture sensor: to measure soil moisture content (Linde Intelligent Technology Co., Ltd., London, UK). | (80 × 600 × 160) Slope angle 15° | Silty clay was sandwiched with crushed stone and crushed stone soil. Reservoir level change was simulated as external triggering. | – |
| Liu et al. [11] | Soil moisture sensor: SEN0193. Micropore water pressure transducers: KPG PA. MEMS sensors: 9-axis gyroscope and magnetic meter to measure the deflection angle of soil. The warning signs are based on the values of the factor of safety. | (40 × 80 × 45) Slope angle 45° | Homogeneous slope. Artificial rainfall was adopted. | – |
| Study | Prototype System Components | Notes |
|---|---|---|
| Kotta et al. [106]; Rosi et al. [7] | Vibration sensor (accelerometer) to measure the biaxial acceleration change. | Remote real-time system. |
| Ramesh & Vasudevan [6] | Piezometers: current-based 4–20 mA output piezometers were chosen to eliminate wire length errors; additional filter piezometer tips were installed that could easily be removed for calibration and reinstallation. Dielectric moisture sensors: to measure the volumetric water content; used to quantify a relationship with rainfall infiltration. Strain gauges: the strain gauges were fixed at the outer diameter of an inclinometer casing surface; able to measure four dimensions (X, Y (90°), α (120°), β (240°)). Tiltmeters: attached inside the inclinometer casing to calibrate the strain gauges. Weather station: tipping bucket rain gauges were used to measure (rainfall, humidity, temperature, wind speed, wind direction, pressure). | Remote real-time system. |
| Chuan et al. [9] | Force sensor: maximum capacity of 500 kPa; voltage of 9 V; output signal 0–5 V; deviation (%) 0.39–2.37; precision of 1%. Pore water pressure meter: maximum capacity of 100 kPa; voltage of 10 VDC; output signal 0–5 V; calibrated using standard test equipment; deviation (%) 0.0–0.26; precision of 0.3%. Displacement sensor: guyed-type displacement sensor; maximum capacity of 200 mm; voltage of 5 VDC; output signal 0–5 V; deviation (%) 0.27–2.22; precision of 0.5%. | Data are recorded on an SD card. Every 5 days the SD card has to be emptied. |
| He et al. [109] | Stress sensor: measure the sliding force in the anchor cable. | Remote real-time system. |
| Wang et al. [72] | FBG-based inclinometers: Horizontal displacement with high accuracy in millimeter range; spatial resolution of 1 m; FBG of an internal diameter of 7 cm and thickness of 5 mm; aluminum inclinometers were used where it was expected that the inclinometer casing was consistent with the soil. | Based on wiring and field data collection. |
| Zheng et al. [59,60] | FBG-based inclinometers: precision of 0.02 mm; maximum deflection up to the damage of the tube; ABS inclinometer from Changzhou Jin Tu Mu Engineering Instrument Co., Ltd., Changzhou, China; the strain collection device TST3826 from Test Electronics Equipment Manufacturing Co. Ltd., Beijing, China. | Based on wiring and field data collection. |
| Yunus et al. [107] | Soil moisture sensor and soil temperature sensor. Vibration transducer: to monitor the hill slope. Accelerometer: ADXL 335 accelerometer for slope angle measurement. Seismograph: to measure the seismic vibration using a Visaton FR8 8–ohm loudspeaker. Weather station: to measure temperature, humidity, and atmospheric pressure. | Remote real-time system. |
| Yang et al. [49] | Inclination sensor: range ±30° resolution 0.0025 degrees. Soil moisture sensor: Decagon EC–5, Decagon Devices, Pullman, WA, USA; up to 30 cm deep; measure volumetric water content using a dielectric constant; range 0–1; accuracy of ±0.01. Soil suction sensor: Tensiomark TS2, Stevens Water Monitoring Systems, Portland, OR, USA; range 0–300 kPa; accuracy ±0.15 kPa. Rain gauge: CAWS 100, Huayun Group, Beijing, China; resolution of 0.2 mm; range 0–4 mm/min. | Remote real-time system. The temporal resolution of 10 min on rainy days and 1 h on dry days. Costs USD 1500. |
| Prabha et al. [103] | Geophone: to convert the ground movement into voltage. Inclinometer: to measure the slope movement angle. Strain gauges: to measure the micro movement. Dielectric moisture sensor: to measure the volumetric water content. Piezometers: to measure the volumetric water content. Tipping bucket: to measure the rainfall. | Remote real-time system. Two thresholds were adopted to save power consumption. |
| Askarinejad et al. [73] | Soil deformation sensors (SDS): <1 mm; data frequency 100 Hz; bending stiffness less than PVC inclinometer by 300 times; range 0–25 mm; accuracy = 5%. Earth pressure cells (EPCs): to measure horizontal earth pressure; data frequency 100 Hz; range 0–500 kPa; accuracy = 1 kPa. Piezometer: to measure the groundwater table; range 0–100 kPa; accuracy = 1 kPa. TDR: to measure volumetric water content; range 0–1; accuracy = 0.02. Tensiometer: to measure pore water pressure; range –90 to 100 kPa; accuracy = 0.5 kPa. Strain gauges: to measure bending strain; installed on SDS; range –50 to 20 mε; accuracy = 1 μm. Cameras: multicamera surface monitoring (5 fps). | Remote real-time system. Artificial rainfall was adopted with different intensities and durations. |
| Crawford & Bryson [122]; Crawford et al. [62] | Water content reflectometers: Campbell Scientific CS655 to measure volumetric water content, electrical conductivity, dielectric permittivity, and temperature; the sensor was installed at different depths. Porous ceramic disc: MPS–6 sensor to measure the water suction; the sensor was installed at different depths. Cable-extension transducer (CET): to measure the movement; the output signal was voltage and converted to linear displacement. Rain Wise Inc: to measure the rainfall based on a tipping bucket rain gauge; calibrated at 0.25 mm/tip. This system was used to correlate the electrical resistivity measurements (geophysical) with geotechnical measurements. | Based on wiring and field data collection. Data frequency was in 15 min, hourly, and daily average intervals. |
| Gian et al. [96] | Compressed sensing (CS) was adopted to reduce the amount of data and save power consumption. A multimonitoring system to measure soil moisture, temperature, tilting, and vibration using Geophone, and a weather station to monitor rainfall, wind speed, and wind direction. | Wireless sensor network. |
| Ho et al. [68] | Inclinometer: accuracy of 2 mm per 25 m; spatial resolution of 0.5 m; range —30° to + 30°. TDR: HL 1101; accuracy of 2 mm; spatial resolution of 0.05 m; range up to 210 –mρ reflection coefficients. | Based on wiring and field data collection. |
| Zheng et al. [78] | COFT: initial measurement 0.98 mm; maximum range of 36 mm; cost of 0.45 USD/m; consisted of stainless-steel connectors, protective covers, acrylonitrile butadiene styrene (ABS) plastic pipes, capillary steel pipes, and single-module optical fibers. | Based on wiring and field data collection. |
| Chung & Lin [69] | TDR: RG–8 coaxial cable for soil slopes; P3–500 CA for rock slopes; 75.7 mm in diameter; sand and gravel were suggested to be mixed into the grout cement when grout loss occurs, with water/cement ratio of 1; the spatial resolution was 5 cm; can detect the sliding depth, though displacement quantification is difficult. | Based on wiring and field data collection. |
| Tao et al. [108] | Constant resistance and large deformation (CRLD) anchor cable: to monitor the sliding force; 900 kN cumulative sliding force was set to be the critical warning level; able to forecast the landslide 4 h before the event. | Based on wiring and field data collection. |
| Abraham et al. [93,94] | Tilt sensor: accuracy of 0.017°; resolution of 0.003°; sensitivity of 4 V/g; the output was the digital voltage, which was then converted to a tilt angle. Volumetric water content sensor: precision of ±3%; response time of 10 ms; resolution of 0.002 m3/m3. Small dimensions and affordable. The sensor sleeps for 10 min after sending a signal. | Remote real-time system. Suitable for shallow landslides. |
| Blahůt et al. [142] | 3D dilatometer: To measure the movement of slow-moving landslide in (X, Y, Z) directions; TM–71; high precision of ±0.007 mm; temporal resolution of 24 h. | Slow-moving landslide. Automatic data processing. |
| Zheng et al. [83] | Quasi-distributed fiber-optic displacement sensor (QDFODS): initial measurement of 0.98 mm; maximum value of 36 mm; can determine the sliding surface while the spatial resolution can be determined based on the site investigation studies; used stainless-steel covers to protect the optical fiber and bowknot bending modulator. | Based on wiring and field data collection. |
| Jeong et al. [92] | Tensimeter: to measure soil water suction; jet fill tensiometer; range 0–100 kPa; accuracy of 1%. Soil moisture sensor: Soil Moisture Equipment Corp. (EC–5); range 0–100%; accuracy of 3%. Rain gauge: KWRG–105 (Wellbian system); accuracy of 3%. Inclinometer: SCA1231T–D07 (Murata Electronics); range of −30° to +30°; accuracy of 1.5%. This system is suitable for rainfall-induced landslides, as it can monitor suction stress, soil moisture content, and rainfall. | Remote real-time system. A site investigation was adopted to optimize monitoring locations. |
| Segui & Veveakis [30] | Thermometer: to monitor the temperature of deep-seated landslides; resolution of 1 × 10−4 °C the sensor was installed at the shear band, which required prior investigation. Piezometer: to monitor water pressure and temperature. Extensometer: To monitor the displacement. | Based on wiring and field data collection. |
| Wicki & Hauck [116] | ERT: to calculate plot-scale soil moisture fluctuation; spatial resolution of 25 cm; temporal resolution of 2 h during rainy days and daily otherwise; installed approximately 10 cm into the soil. Soil moisture sensor: capacitance-based soil moisture sensors (5TE, METER Group) to verify the ERT method and measure VMC; inserted at different depths (0.15 to 1 m). Tensiometers: T8 Tensiometer, METER Group to measure SWP and verify the ERT method; inserted at different depths (0.15 to 1 m). | Automated ERT system. Can provide spatial resolution instead of point sensors. |
| Minardo et al. [87] | BOFDA: The spatial resolution of 5 cm; the temporal resolution of 3 min; monitors rock fall. | Based on wiring and field data collection. |
| Sheikh et al. [101] | Tilt sensor: can measure tilting in two directions; tilt range ±20°; resolution 1/1000°; precision 10/1000°; service temperature −20 to + 60 °C; water pressure resistance 0.5 MPa; temporal resolution of 10 min. Pipe strain gauge: to verify the tilt reading; resolution of 1 microstrain; measuring range of ±20,000 macro strain; temporal resolution of 60 min. Groundwater sensor: measuring range 0–100 m; resolution of 100 mm; temperature compensation range of 0 to −30 °C; temporal resolution of 60 min. Rain gauge: fall mass type; measurement unit of 0.2/1 pulse; temporal resolution of 60 min. | Wireless automatic system. Suitable for shallow landslides. Adopted solar power batteries to overcome power consumption issues. |
| Chu et al. [125] | Soil moisture sensors: 6 sensors at different depths/nodes, with 3 sensors of STEMMA and 3 sensors of Teros; STEMMA sensors were verified using standard Teros sensors. Accelerometer: to measure ground vibration for early warning; the sensor was turned off after initial development to reduce noise and save battery life. Rainfall: Aerocone tipping bucket rain gauge. Humidity sensor: SHT31D. Piezometric sensor: to measure groundwater level. Pressure and temperature sensor: to measure atmospheric pressure (MS58302). | A wireless automatic system called SitkaNet. Low cost at less than 1000 USD/node. A 5 min temporal resolution. |
| Xiaochun et al. [118] | High-density electrical instrument: to measure the resistivity with DZD–8 multifunction full waveform DC electrical apparatus (Chongqing Geological Instrument Factory); a total of 40 high-density copper electrodes were set on the surface of the model, and the distance between the electrodes was 2 m. Sample drying method: to measure the soil moisture content. | Based on wiring and field data collection. To test the AI model developed through lab and physical models. |
| Wielandt et al. [100] | Three-axis accelerometers: ADXL345 from Analog Devices to measure the inclination and deformation of the surrounding soil; the probe is thin and semi-flexible with a length of 1.8 and internal diameter of 6.35 mm; 0.390 mm resolution and a 95% confidence interval of ±0.73 mm per meter of probe length; depth spatial resolution of 100 mm; acceleration range of ±2 g. Temperature sensor: TMP117AIDRVR; high resolution of 0.0078125 °C; accuracy of ±0.1 °C in the −20–50 °C range. Suitable for shallow landslides. | Wireless automatic system. Suitable for shallow landslides. |
| Setiono et al. [63] | Optical-based wire–extensometers: offers a high resolution of 0.011 ± 0.0083 mm and a speed limit of approximately 36 mm/s. | Wireless automatic system. Suitable for shallow landslides. |
| Marino et al. [126] | Soil moisture sensor: to measure the volumetric water content; this system is combined with a full meteorological station, tensiometers, and TDR probes; the correlation between the volumetric water content and the sensor output voltage (Vout −1) reached an R2 of 0.98. | Wireless automatic system. Suitable for shallow landslides. |
| Blahůt et al. [142]; Zhang et al. [35]; Zheng et al. [83] | DSS: a novel distributed strain sensing (DSS) cable based on Brillouin frequency; improved soil coupling and developed a new mathematical general model (AIM); depth spatial resolution of 1 m; displacement range based on the field tests up to 12 cm with millimeter range. Quasi-distributed fiber-optic displacement sensor (QDFODS): initial measurement of 0.98 mm; maximum value of 36 mm; can determine the sliding surface while the spatial resolution can be determined based on site investigation studies; used stainless-steel covers to protect the optical fiber and bowknot bending modulator. 3D dilatometer: to measure the movement of slow-moving landslide in (X, Y, Z) directions (TM–71); high precision of ±0.007 mm; temporal resolution of 24 h. | Based on wiring and field data collection. Slow-moving landslide. Automatic data processing. |
| Gap | Recommendations |
|---|---|
| Simple regression analysis was widely utilized to interpret the monitoring results. However, the relationship between subsurface monitoring parameters is complicated and complex. | Using artificial intelligence models is limited in the subsurface monitoring system. Thus, the aforementioned models can provide a possible solution to filling such a gap [4]. |
| Developing a distributed monitoring system that can provide subsurface parameters for wide areas with a large monitoring range, high spatial resolution, suitability for harsh environments, and being self-powered is still a challenging gap to overcome. | Collaboration is needed between different disciplines to design a multi-feature system. To illustrate, triboelectric nanogenerators and wireless power transfer systems can be utilized to power the subsurface monitor system. Moreover, further research is needed to achieve a large monitoring range with high resolution (i.e., the optical fibers). |
| Warning sign techniques and the subsurface temperature mechanism are still under development and require more research. | More laboratory-scale modeling and prototype field tests are needed to quantify and investigate such techniques. |
| Data transfer power issues have been widely studied from the perspective of computer science, while considering the accuracy of the data from the geotechnical perspective is still lacking. | A sensitivity analysis considering different frequency rates and different sensor threshold limits is needed to account for the system accuracy considering both power, data size, and accuracy optimization. |
| Installing the subsurface monitoring system is challenging in terms of (1) accessing the slope and (2) choosing the optimal vulnerable location to be monitored. | (1) A ground vehicle robot can be designed to access places that are very difficult to reach. (2) Statistical or numerical analysis can be used to perform a sensitivity and probability analysis to predict the vulnerable locations [4,5]. |
| Based on the fact that dealing with a harsh environment leads to a high possibility of data loss issues, most studies adopt statistical models to overcome such issues (refer to Section 4.3.3), which neglect the physical and mechanical characteristics of the slope area [4,5]. | Designing a parallel system can provide a viable and effective solution. To clarify, using multi-node and multi-feature monitoring systems allows one to obtain different characteristics for the same slope. These data can be correlated with each other, solving data loss issues. |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ebrahim, K.M.P.; Gomaa, S.M.M.H.; Zayed, T.; Alfalah, G. Recent Phenomenal and Investigational Subsurface Landslide Monitoring Techniques: A Mixed Review. Remote Sens. 2024, 16, 385. https://doi.org/10.3390/rs16020385
Ebrahim KMP, Gomaa SMMH, Zayed T, Alfalah G. Recent Phenomenal and Investigational Subsurface Landslide Monitoring Techniques: A Mixed Review. Remote Sensing. 2024; 16(2):385. https://doi.org/10.3390/rs16020385
Chicago/Turabian StyleEbrahim, Kyrillos M. P., Sherif M. M. H. Gomaa, Tarek Zayed, and Ghasan Alfalah. 2024. "Recent Phenomenal and Investigational Subsurface Landslide Monitoring Techniques: A Mixed Review" Remote Sensing 16, no. 2: 385. https://doi.org/10.3390/rs16020385
APA StyleEbrahim, K. M. P., Gomaa, S. M. M. H., Zayed, T., & Alfalah, G. (2024). Recent Phenomenal and Investigational Subsurface Landslide Monitoring Techniques: A Mixed Review. Remote Sensing, 16(2), 385. https://doi.org/10.3390/rs16020385