


A Robust Position Estimation Method in the Integrated Navigation System via Factor Graph


Abstract
:1. Introduction
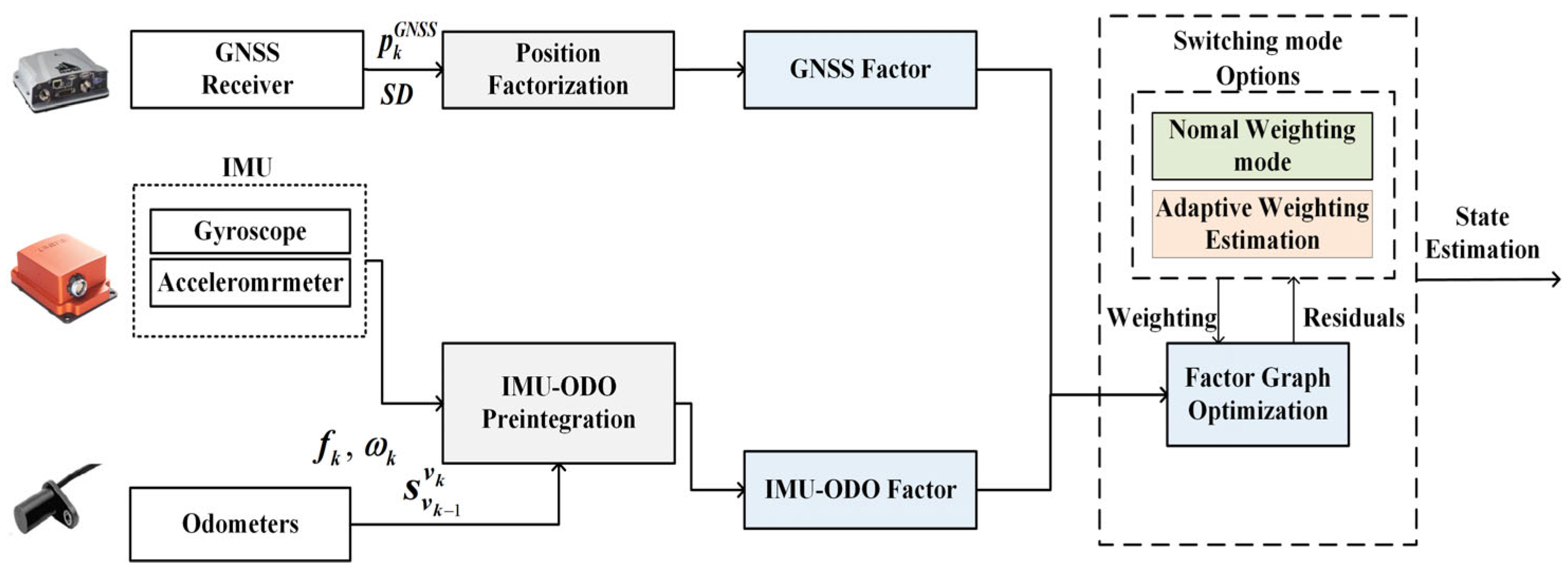
- An IMU/GNSS/ODO integrated navigation framework based on factor graph is described. We accommodate the key parameters of each sensor and add ODO into preintegration to construct the IMU-ODO preintegration factor, which reduces the drift of IMU.
- To enhance the accuracy and robustness, an adaptive weighting estimation (AWE) algorithm is proposed, which can estimate the state and covariance simultaneously. We derive the principle of AWE from the maximum a posteriori (MAP) perspective.
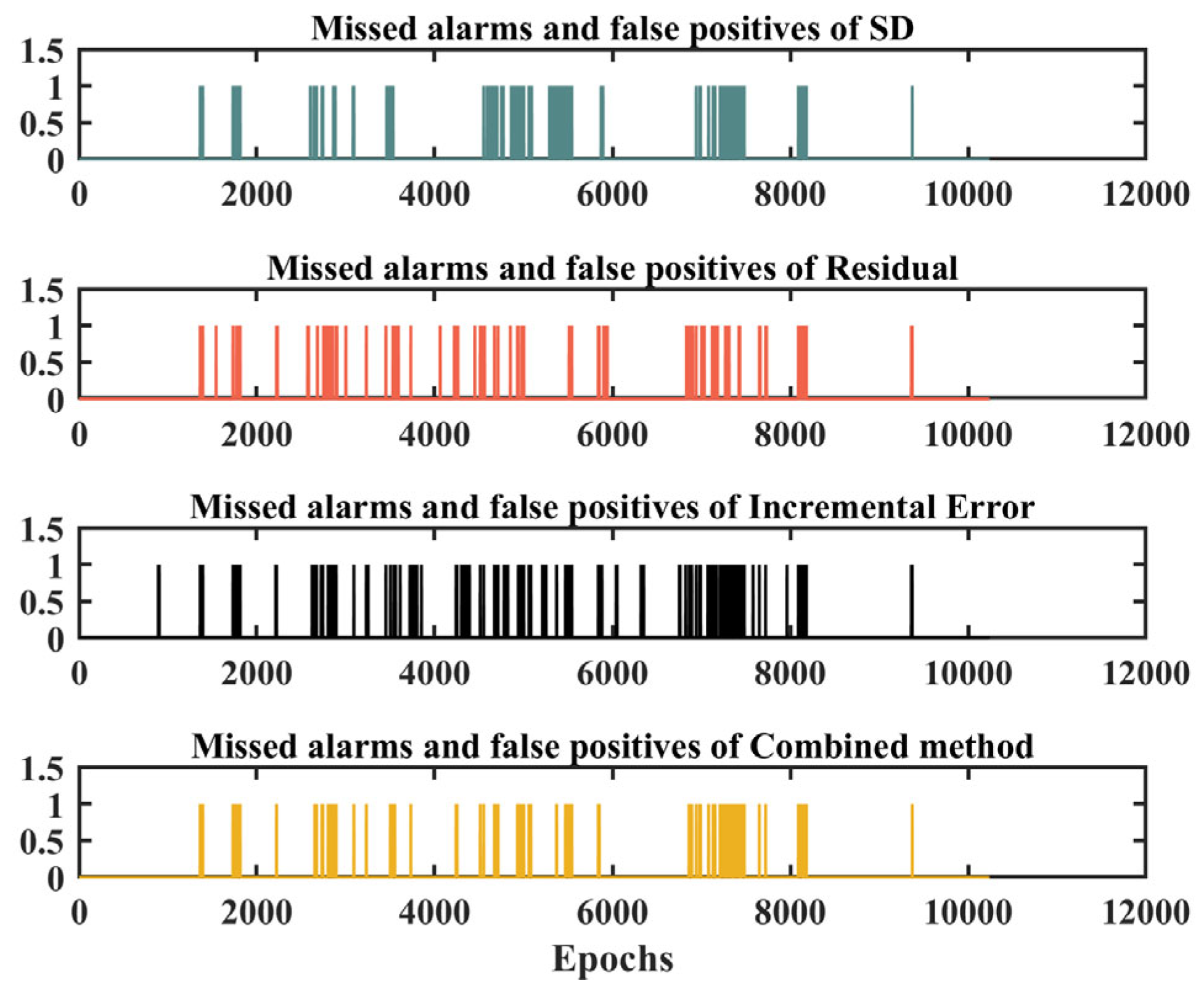
- We put forward a GNSS anomaly detection method based on multi-conditional analysis. Through anomaly detection, the system achieves autonomous switching between two modes, original weighting estimation or adaptive weighting estimation, significantly reducing the missed alarm rate and time delays in fault recovery due to parameter estimation.
2. Factor Graph Algorithm and the Formulation in IMU/GNSS/ODO Integrated Navigation System
2.1. MAP Estimation and Factor Graph Algorithm
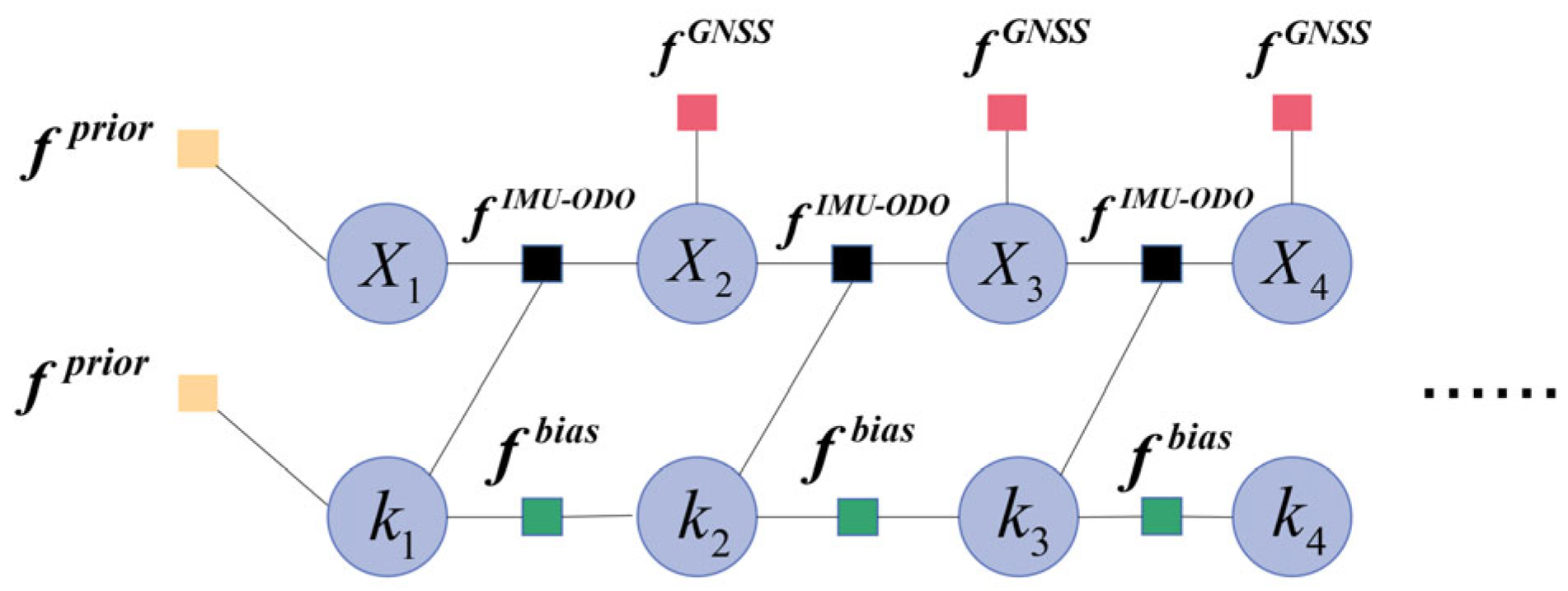
2.2. Factor Graph Formulation in Integrated Navigation System
- A.
- Formulation
- B.
- IMU-ODO Preintegration Factor
- C.
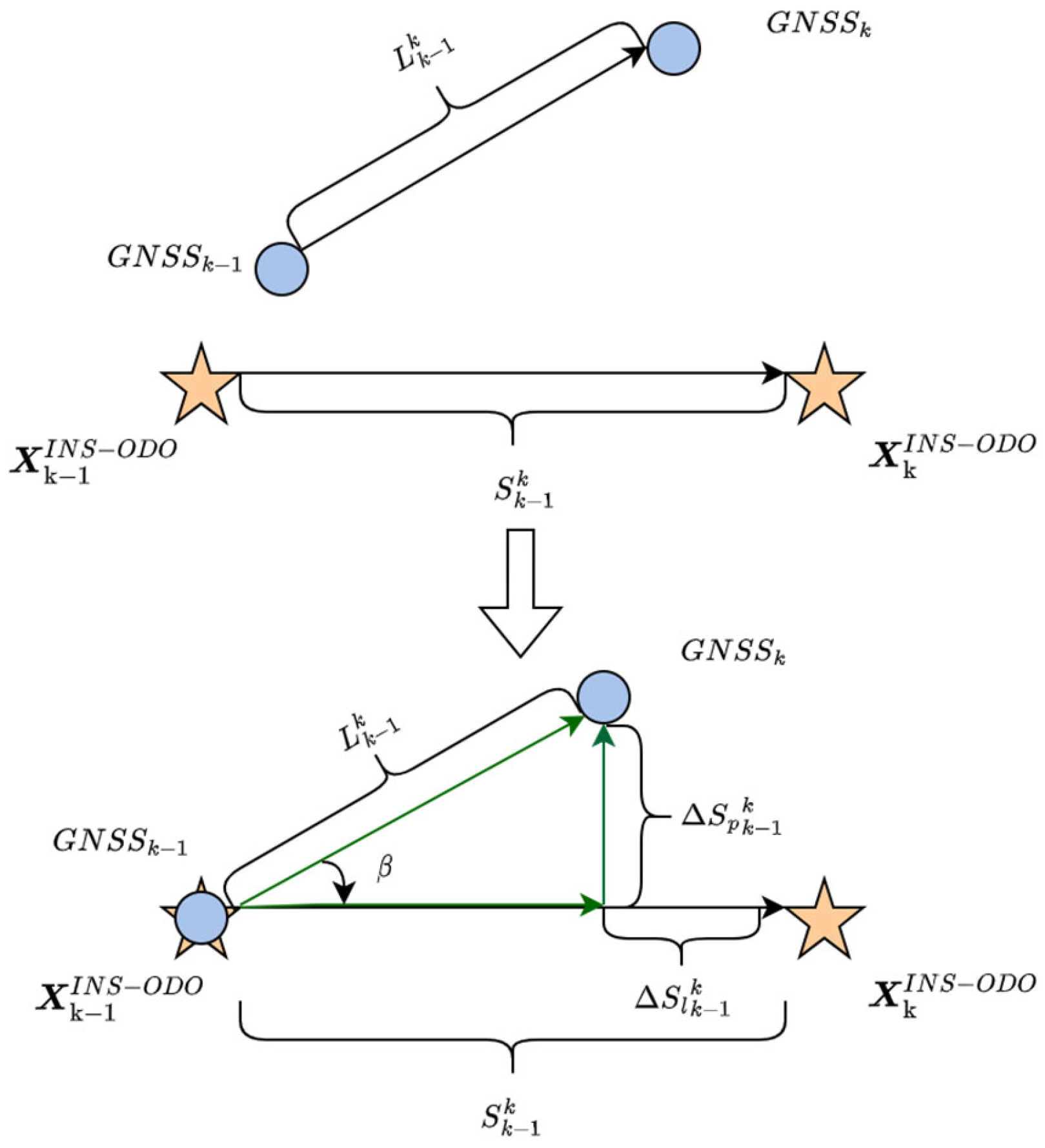
- GNSS Positioning Factor
- D.
- IMU-ODO/GNSS factor graph model
3. Robust Factor Graph Optimization Based on Adaptive Weighting Estimation with Multi-Conditional Analysis
3.1. GNSS Anomaly Detection Based on Multi-Conditional Analysis
3.2. Adaptive Weighting Estimation
4. Experiment Results and Discussion
- (1)
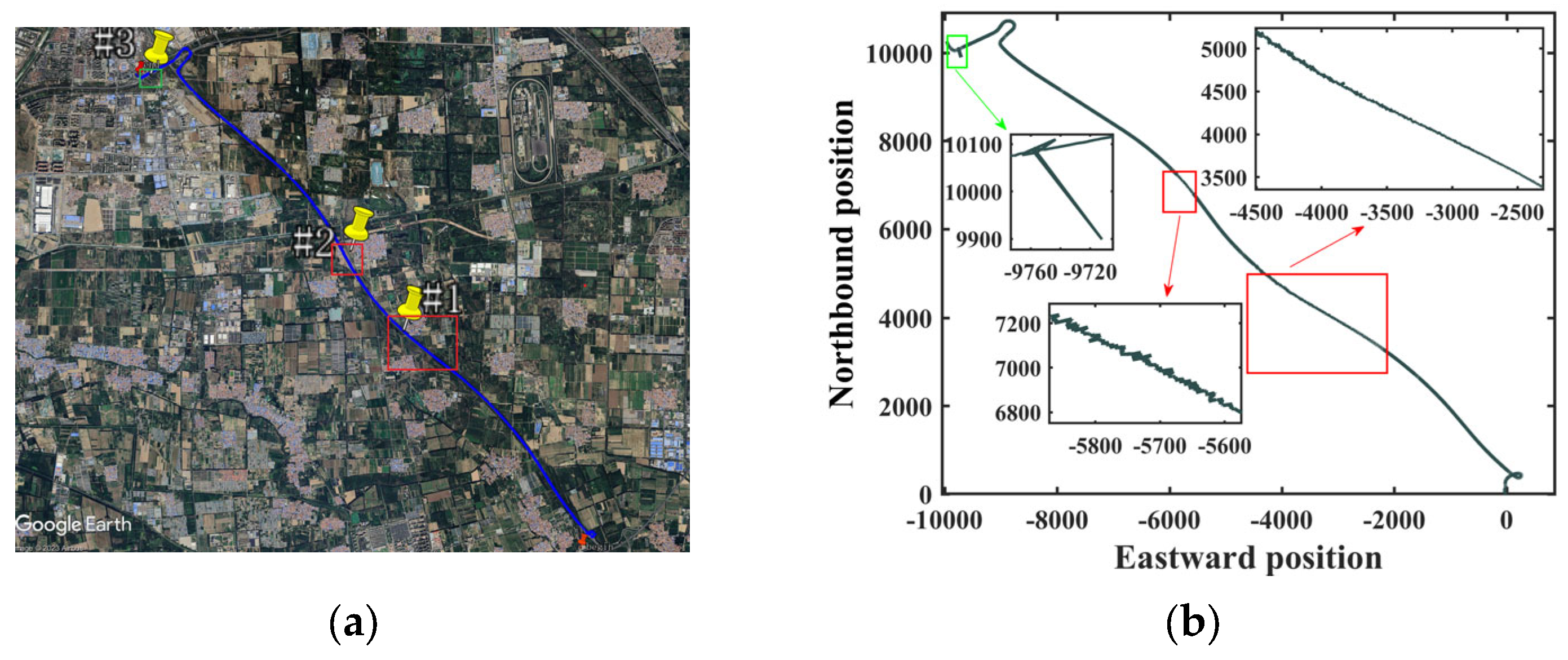
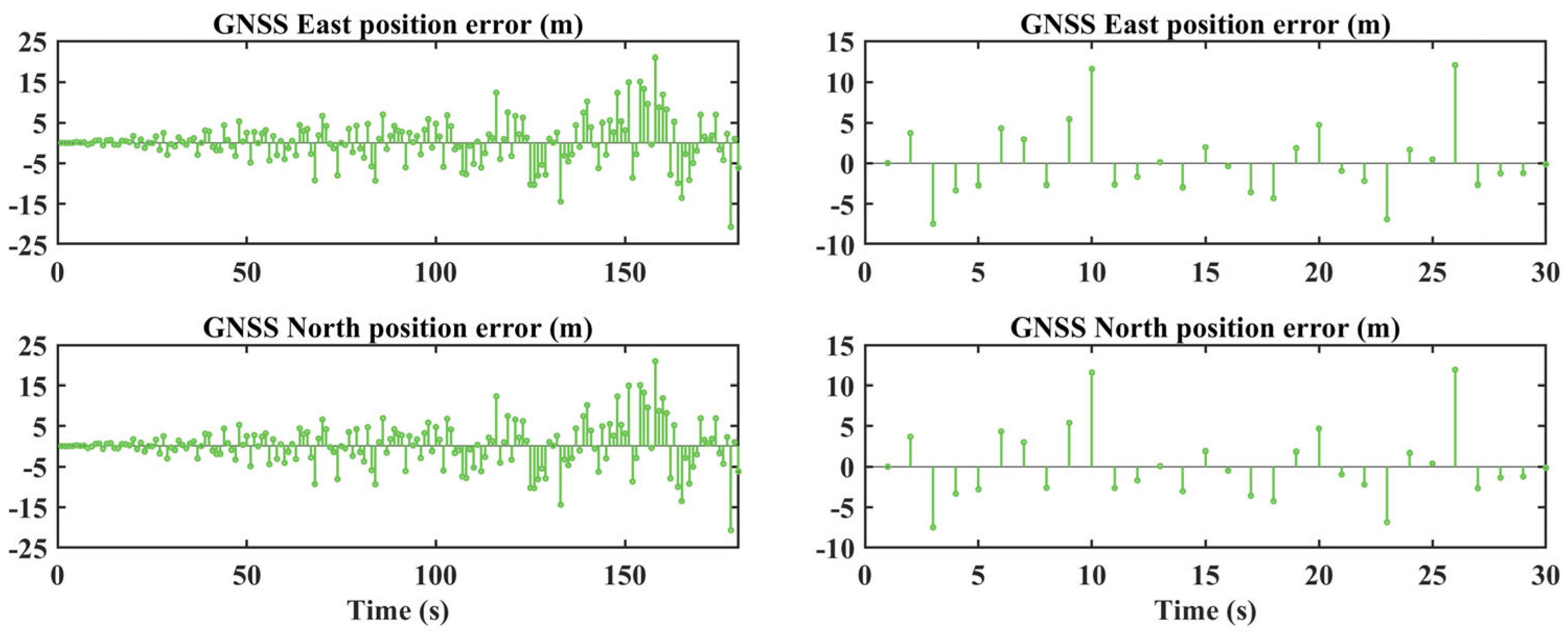
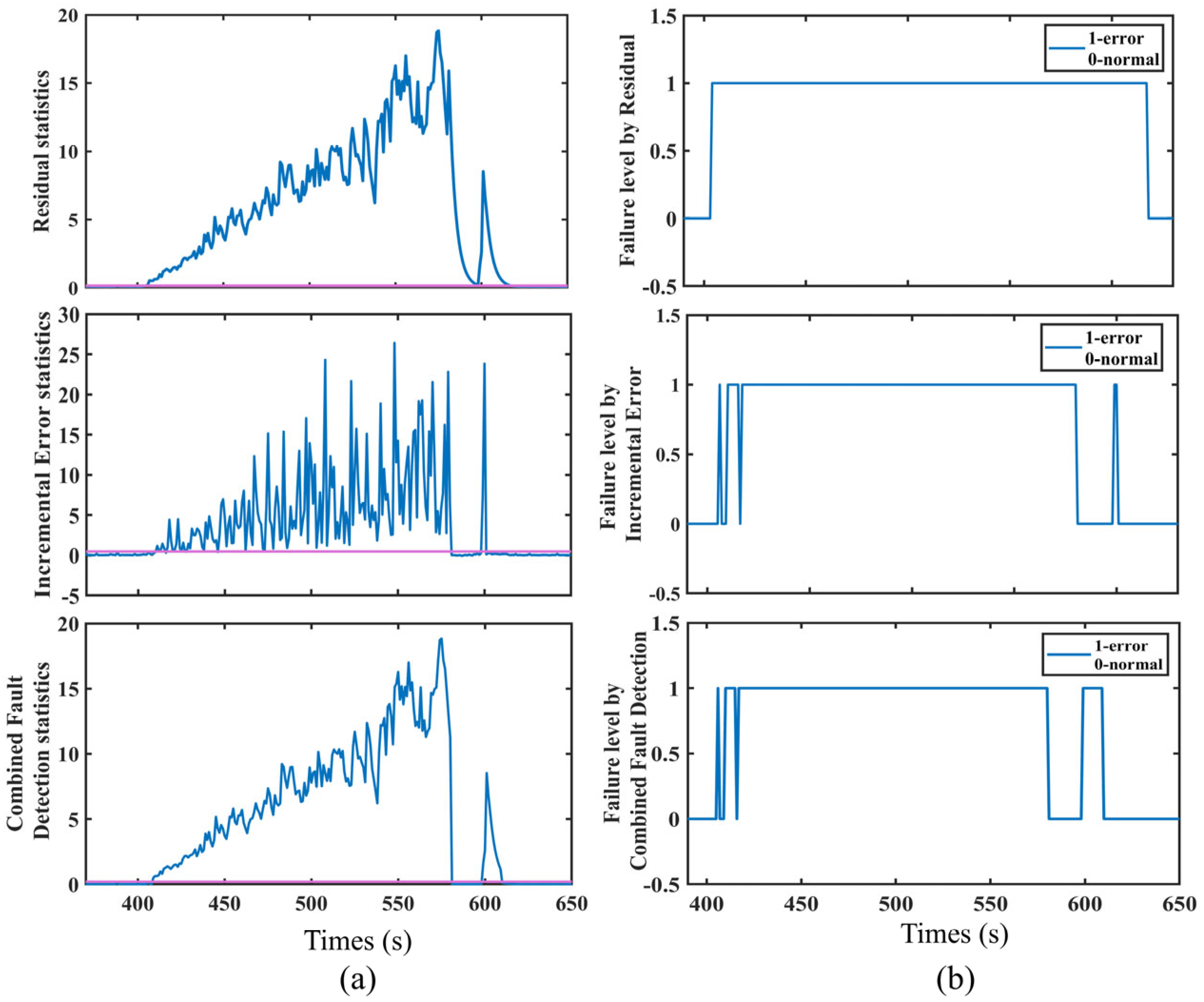
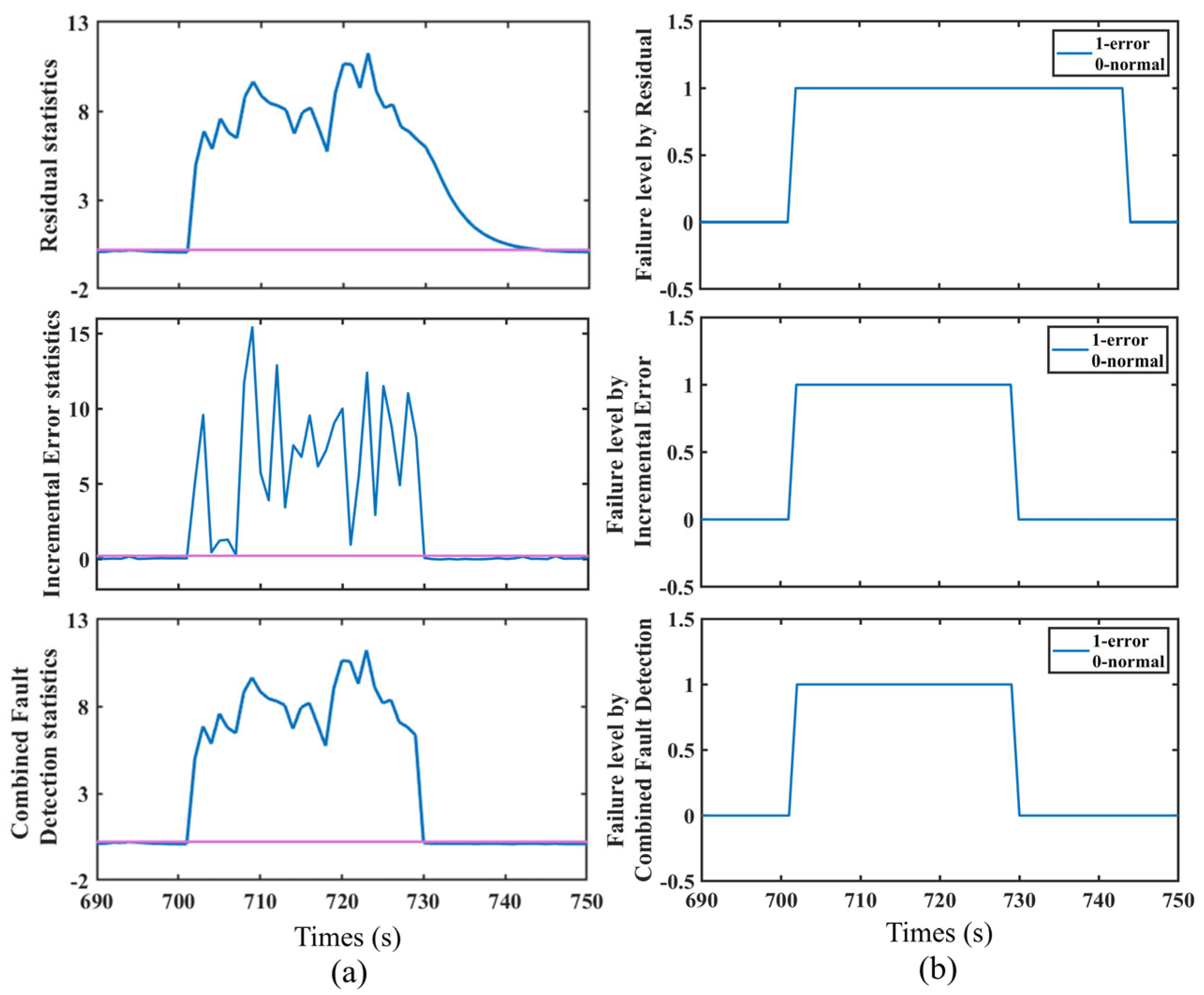
- #1 and #2 are selected during the stable driving process in an open environment, which means that the original data in these segments are error-free. The complete failure of SD detection, which is the worst-case scenario, can be simulated by adding errors. To simulate the ramp and step fault of the satellite, we add slow-growth faults at 400 s to 580 s (#1), lasting 180 s, and step faults at 700 s to 730 s (#2), lasting 30 s, to the latitude and longitude of the satellite. The GNSS anomaly detection algorithm is validated using all segments including simulation errors.
- (2)
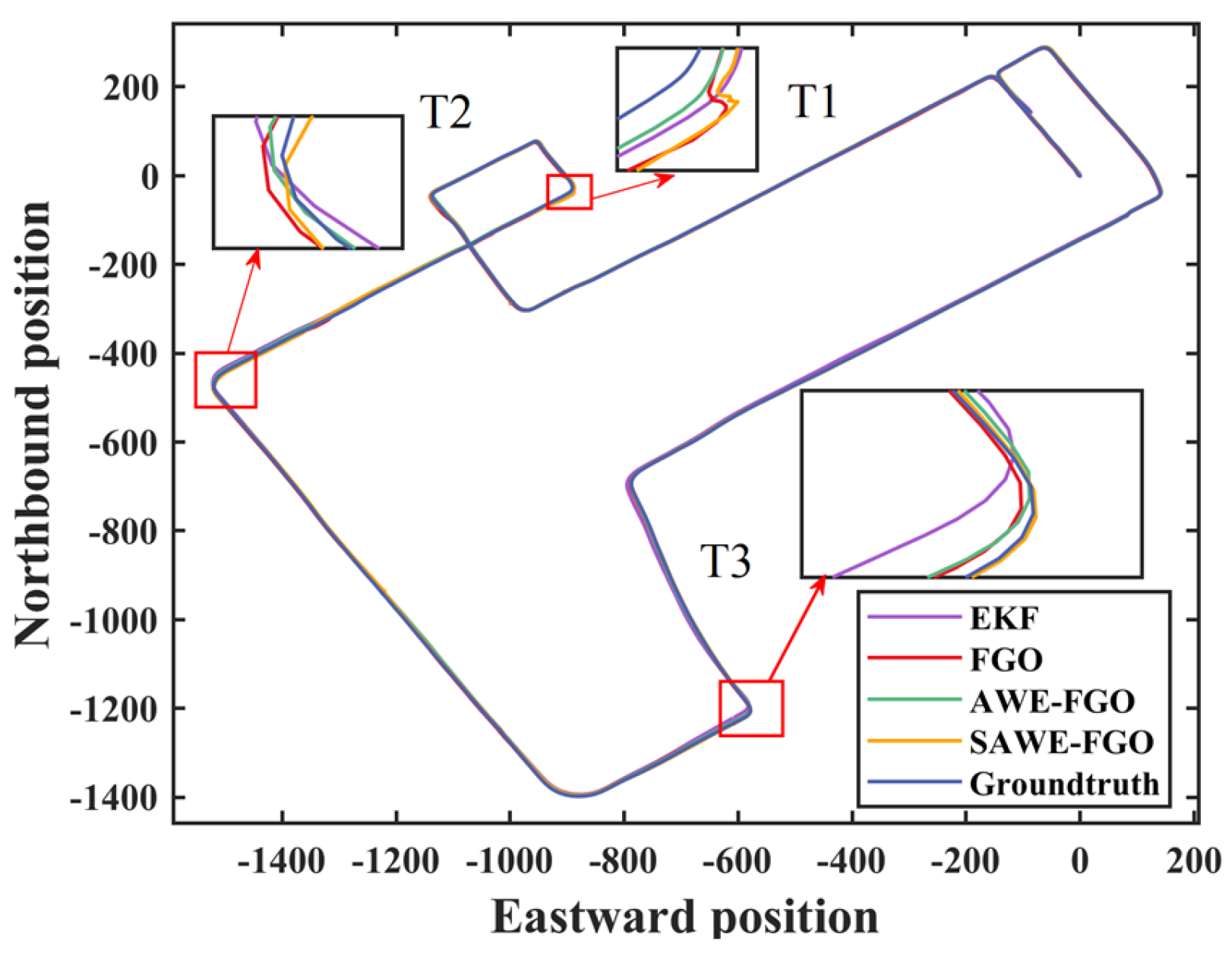
- #1 and #3 are selected to verify the effectiveness of SAWE-FGO. #3 (from 1153 s to 1162 s) is a winding road where the vehicle passes through the staggered elevation before the turn, with continuous random jump points in the raw data (from 1138 s to 1152 s).
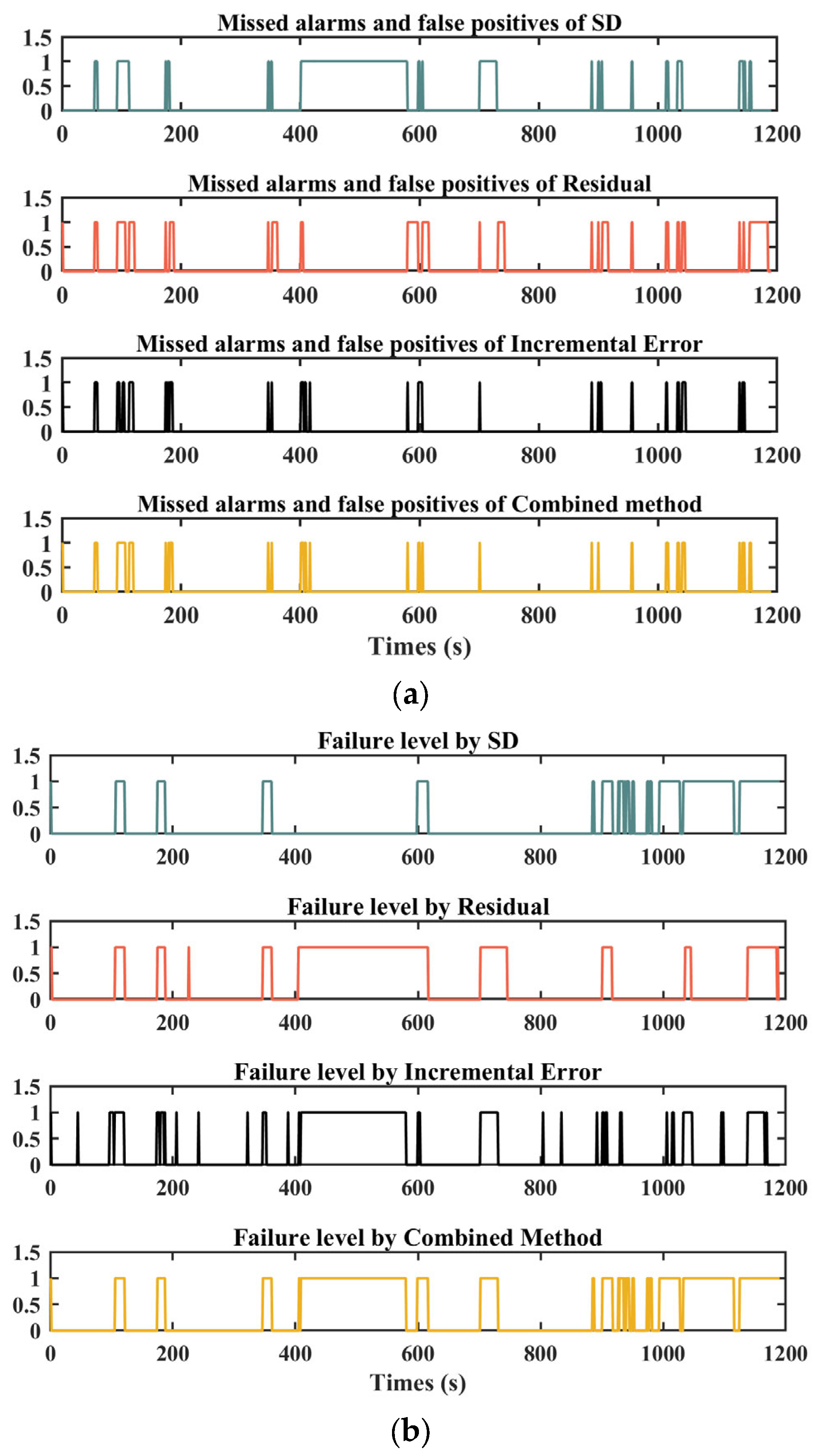
4.1. Validation of the GNSS Anomaly Detection Algorithm
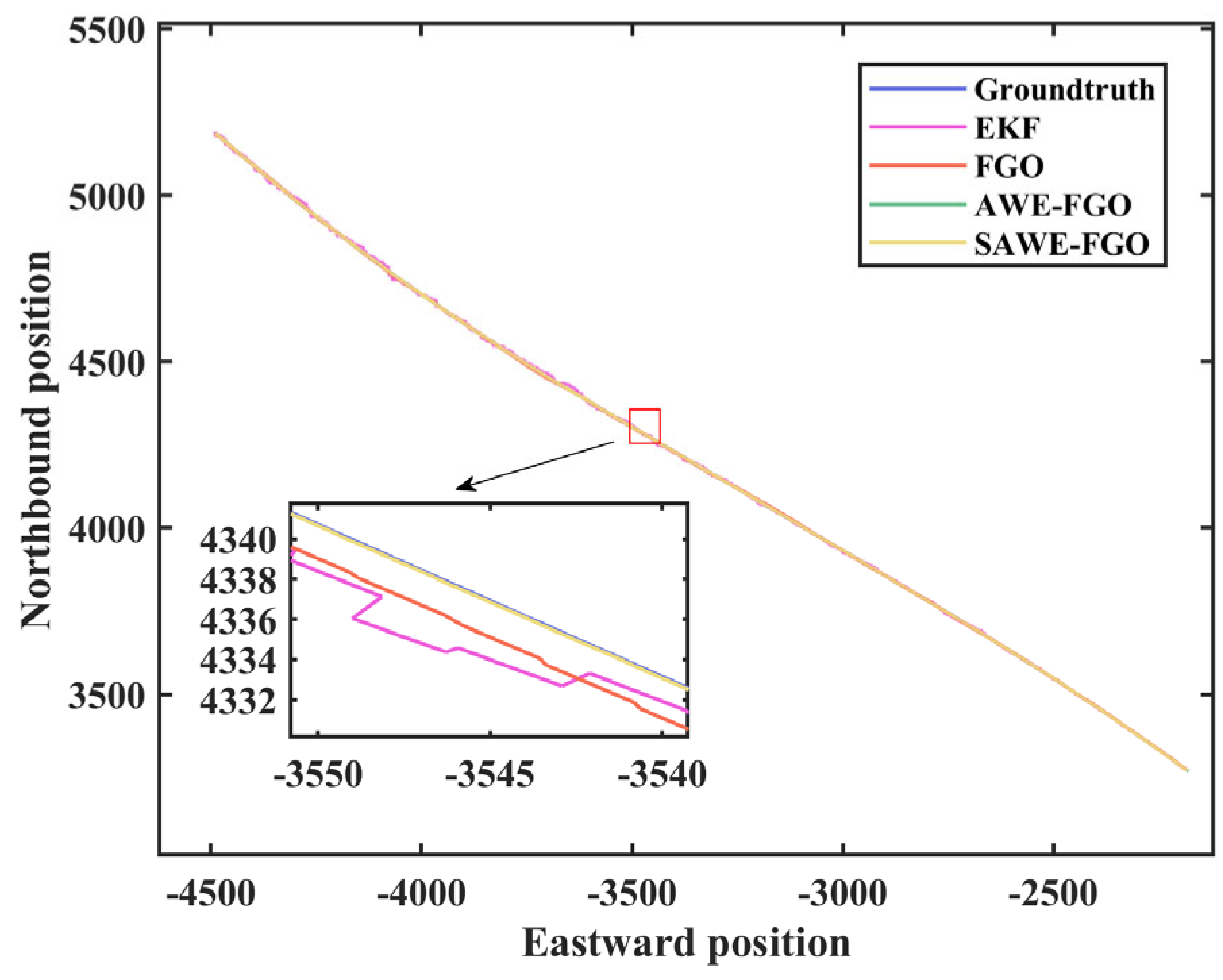
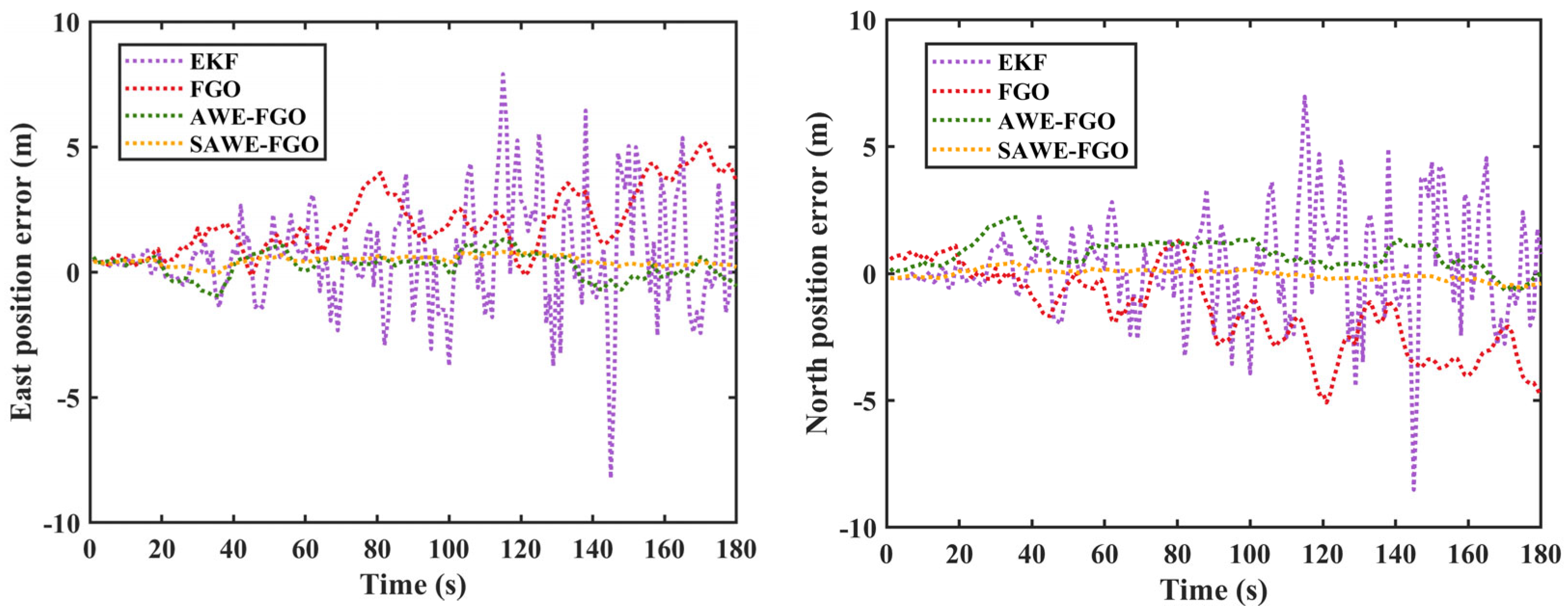
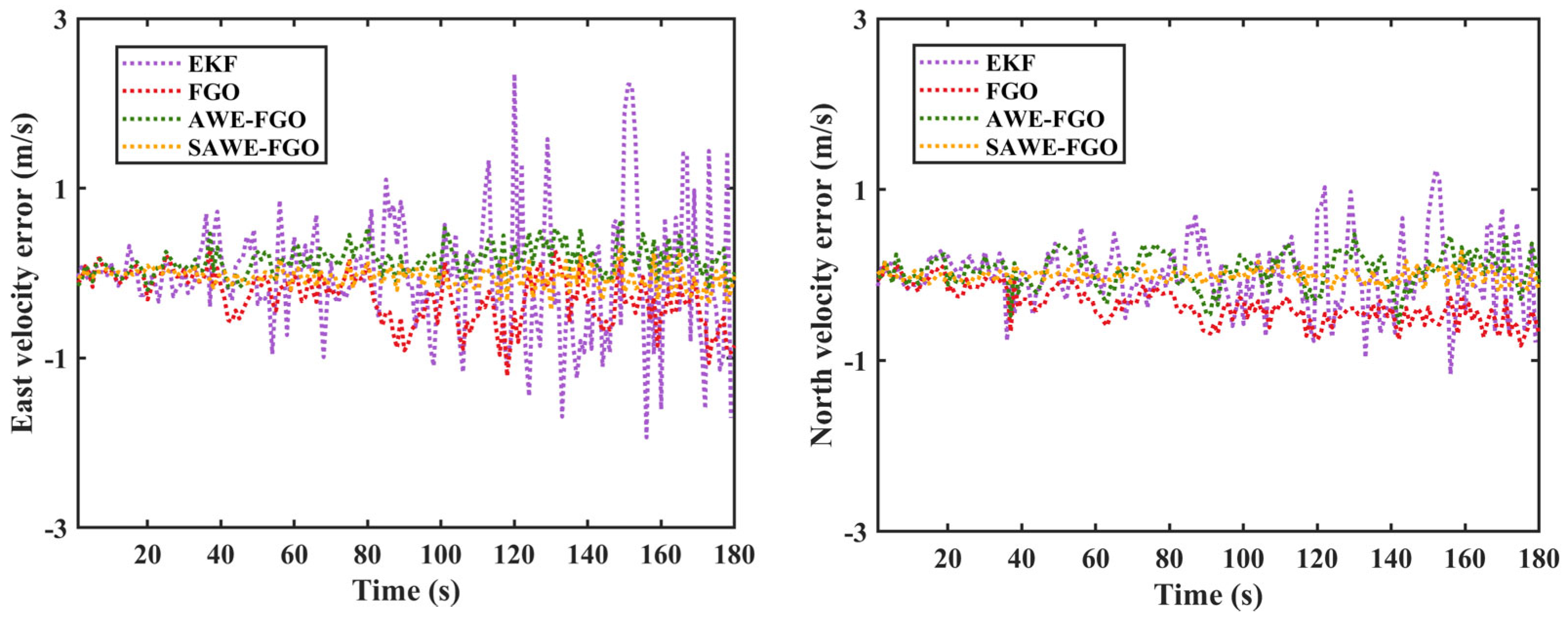
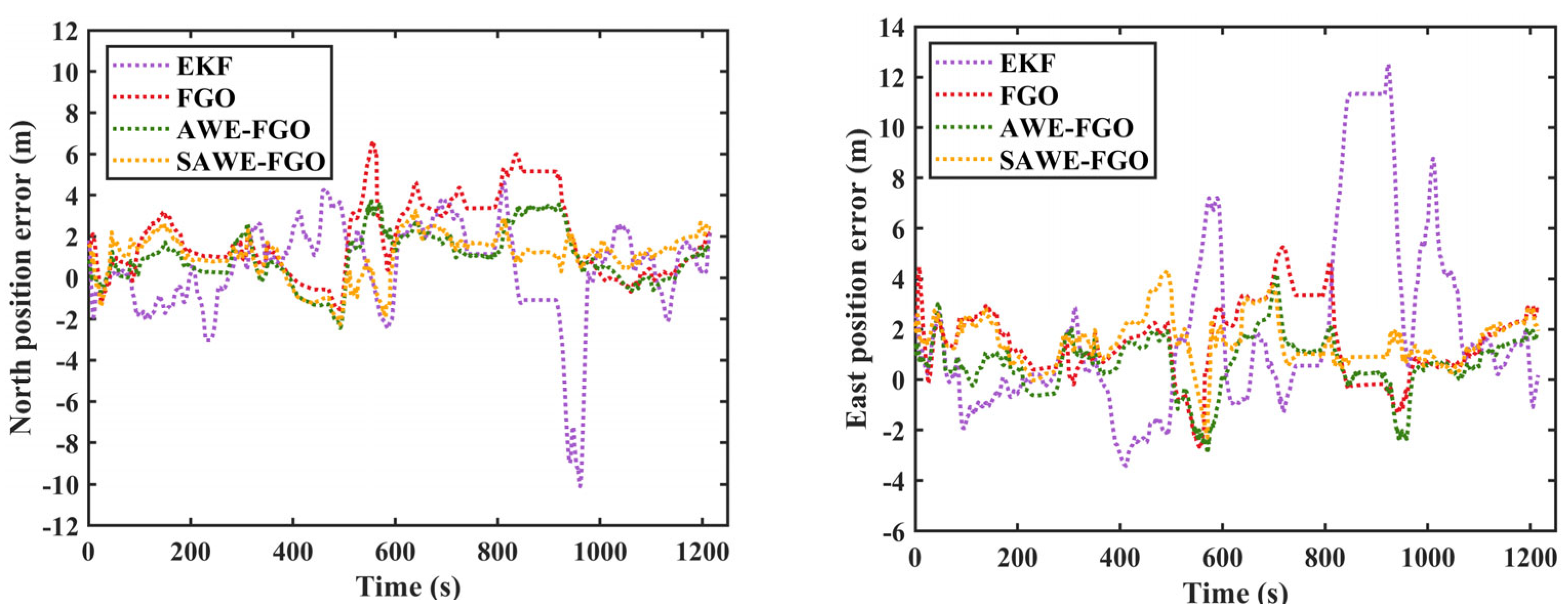
4.2. Comparison of Performance between Different Information Fusion Methods
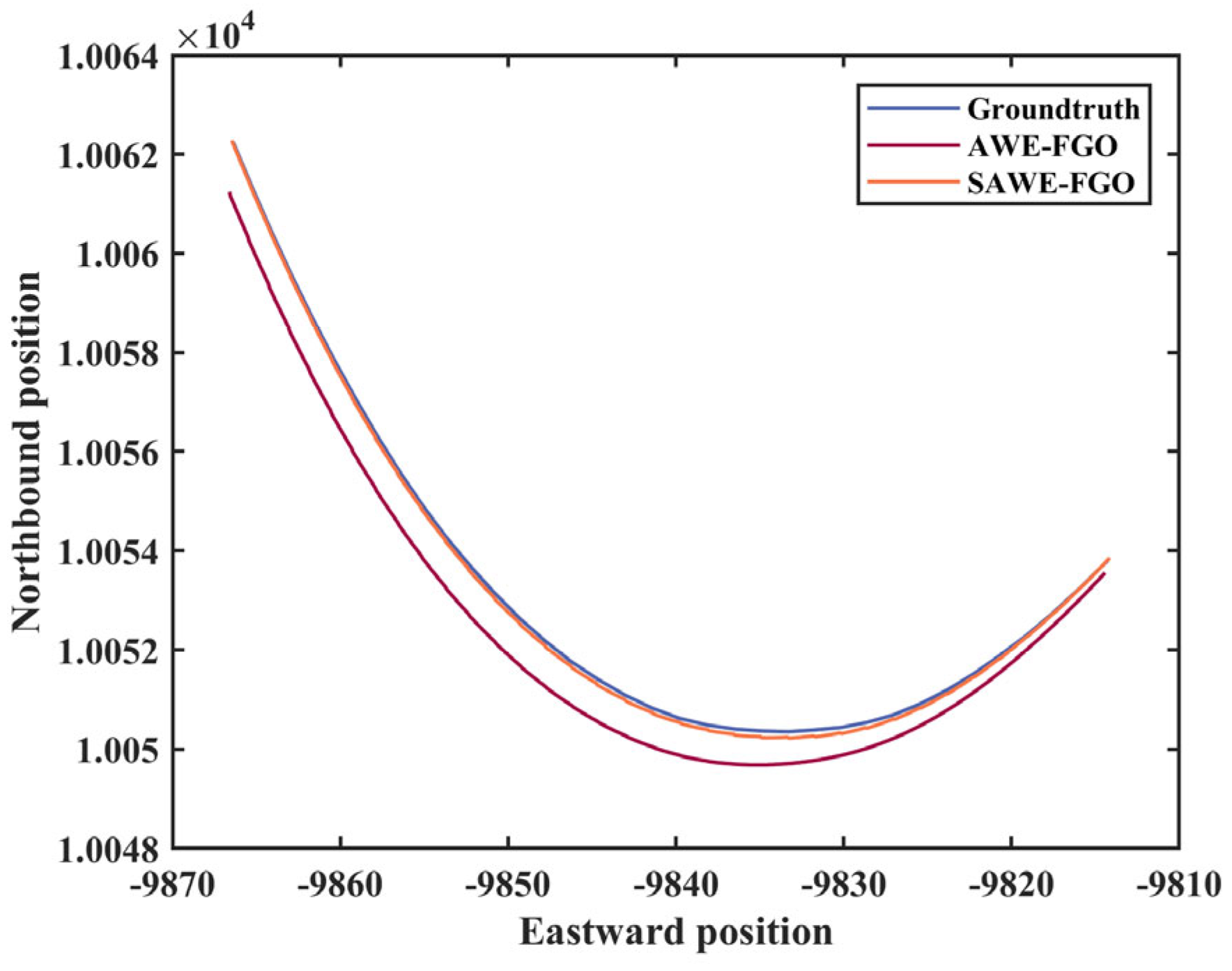
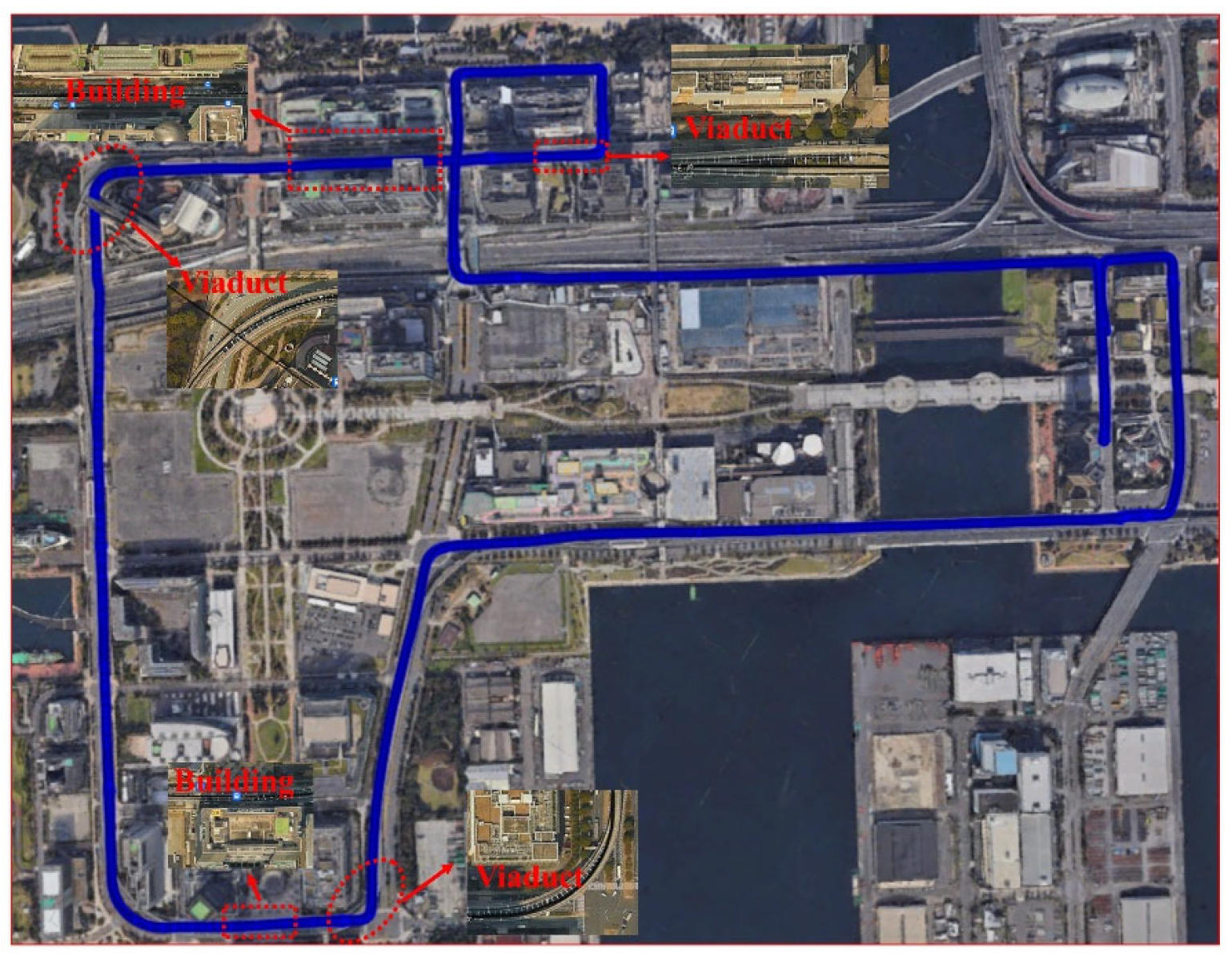
4.3. Experimental Validation Using an Open-Source Dataset
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Groves, P. Principles of GNSS, Inertial, and Multisensor Integrated Navigation Systems; Artech: Morristown, NJ, USA, 2007. [Google Scholar]
- Inside GNSS. Multipath vs. NLOS Signals; Inside GNSS—Global Navigation Satellite Systems Engineering, Policy, and Design: Red Bank, NJ, USA, 2013. [Google Scholar]
- Boguspayev, N.; Akhmedov, D.; Raskaliyev, A.; Kim, A.; Sukhenko, A. A Comprehensive Review of GNSS/INS Integration Techniques for Land and Air Vehicle Applications. Appl. Sci. 2023, 13, 4819. [Google Scholar] [CrossRef]
- Mu, M.; Zhao, L. A GNSS/INS-Integrated System for an Arbitrarily Mounted Land Vehicle Navigation Device. GPS Solut. 2019, 23, 112. [Google Scholar] [CrossRef]
- Lou, T.-S.; Chen, N.-H.; Chen, Z.-W.; Wang, X.-L. Robust Partially Strong Tracking Extended Consider Kalman Filtering for INS/GNSS Integrated Navigation. IEEE Access 2019, 7, 151230–151238. [Google Scholar] [CrossRef]
- Allotta, B.; Caiti, A.; Costanzi, R.; Fanelli, F.; Fenucci, D.; Meli, E.; Ridolfi, A. A New AUV Navigation System Exploiting Unscented Kalman Filter. Ocean Eng. 2016, 113, 121–132. [Google Scholar] [CrossRef]
- Arasaratnam, I.; Haykin, S. Cubature Kalman Filters. IEEE Trans. Autom. Control 2009, 54, 1254–1269. [Google Scholar] [CrossRef]
- Bell, B.M.; Cathey, F.W. The Iterated Kalman Filter Update as a Gauss-Newton Method. IEEE Trans. Autom. Control 1993, 38, 294–297. [Google Scholar] [CrossRef]
- Indelman, V.; Williams, S.; Kaess, M.; Dellaert, F. Information Fusion in Navigation Systems via Factor Graph Based Incremental Smoothing. Robot. Auton. Syst. 2013, 61, 721–738. [Google Scholar] [CrossRef]
- Wen, W.; Bai, X.; Kan, Y.C.; Hsu, L.-T. Tightly Coupled GNSS/INS Integration via Factor Graph and Aided by Fish-Eye Camera. IEEE Trans. Veh. Technol. 2019, 68, 10651–10662. [Google Scholar] [CrossRef]
- Wen, W.; Pfeifer, T.; Bai, X.; Hsu, L.-T. It Is Time for Factor Graph Optimization for GNSS/INS Integration: Comparison between FGO and EKF. arXiv 2020, arXiv:2004.10572. [Google Scholar]
- Zeng, Q.; Chen, W.; Liu, J.; Wang, H. An Improved Multi-Sensor Fusion Navigation Algorithm Based on the Factor Graph. Sensors 2017, 17, 641. [Google Scholar] [CrossRef] [PubMed]
- Dai, J.; Liu, S.; Hao, X.; Ren, Z.; Yang, X. UAV Localization Algorithm Based on Factor Graph Optimization in Complex Scenes. Sensors 2022, 22, 5862. [Google Scholar] [CrossRef] [PubMed]
- Xu, J.; Yang, G.; Sun, Y.; Picek, S. A Multi-Sensor Information Fusion Method Based on Factor Graph for Integrated Navigation System. IEEE Access 2021, 9, 12044–12054. [Google Scholar] [CrossRef]
- Dehghannasiri, R.; Esfahani, M.S.; Dougherty, E.R. Intrinsically Bayesian Robust Kalman Filter: An Innovation Process Approach. IEEE Trans. Signal Process. 2017, 65, 2531–2546. [Google Scholar] [CrossRef]
- Zhao, D.; Hancock, C.M.; Roberts, G.W.; Jin, S. Cycle Slip Detection during High Ionospheric Activities Based on Combined Triple-Frequency GNSS Signals. Remote Sens. 2019, 11, 250. [Google Scholar] [CrossRef]
- Yuan, H.; Zhang, Z.; He, X.; Xu, T.; Xu, X.; Zang, N. Real-Time Cycle Slip Detection and Repair Method for BDS-3 Five-Frequency Data. IEEE Access 2021, 9, 51189–51201. [Google Scholar] [CrossRef]
- Sun, K.; Zeng, Q.; Liu, J.; Wang, S. Fault Detection of Resilient Navigation System Based on GNSS Pseudo-Range Measurement. Appl. Sci. 2022, 12, 5313. [Google Scholar] [CrossRef]
- Roysdon, P.F.; Farrell, J.A. GPS-INS Outlier Detection & Elimination Using a Sliding Window Filter. In Proceedings of the 2017 American Control Conference (ACC), Seattle, WA, USA, 24–26 May 2017; pp. 1244–1249. [Google Scholar]
- Wen, W.; Meng, Q.; Hsu, L.-T. Integrity Monitoring for GNSS Positioning via Factor Graph Optimization in Urban Canyons. In Proceedings of the 34th International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS+ 2021), St. Louis, MO, USA, 20–24 September 2021; pp. 1508–1515. [Google Scholar]
- Hu, Y.; Li, H.; Liu, W. Robust Factor Graph Optimisation Method for Shipborne GNSS/INS Integrated Navigation System. IET Radar Sonar Navig. 2023, 17, 1–17. [Google Scholar] [CrossRef]
- Zhang, C.; Zhao, X.; Pang, C.; Li, T.; Zhang, L. Adaptive Fault Isolation and System Reconfiguration Method for GNSS/INS Integration. IEEE Access 2020, 8, 17121–17133. [Google Scholar] [CrossRef]
- Su, S.; Dai, H.; Cheng, S.; Lin, P.; Hu, C.; Lv, B. A Robust Magnetic Tracking Approach Based on Graph Optimization. IEEE Trans. Instrum. Meas. 2020, 69, 7933–7940. [Google Scholar] [CrossRef]
- Sünderhauf, N.; Protzel, P. Switchable Constraints for Robust Pose Graph SLAM. In Proceedings of the 2012 IEEE/RSJ International Conference on Intelligent Robots and Systems, Vilamoura-Algarve, Portugal, 7–12 October 2012; pp. 1879–1884. [Google Scholar]
- Pfeifer, T.; Lange, S.; Protzel, P. Dynamic Covariance Estimation—A Parameter Free Approach to Robust Sensor Fusion. In Proceedings of the 2017 IEEE International Conference on Multisensor Fusion and Integration for Intelligent Systems (MFI), Daegu, Republic of Korea, 16–18 November 2017; pp. 359–365. [Google Scholar]
- Wei, X.; Li, J.; Zhang, D.; Feng, K. An Improved Integrated Navigation Method with Enhanced Robustness Based on Factor Graph. Mech. Syst. Signal Process. 2021, 155, 107565. [Google Scholar] [CrossRef]
- Lesouple, J.; Robert, T.; Sahmoudi, M.; Tourneret, J.-Y.; Vigneau, W. Multipath Mitigation for GNSS Positioning in an Urban Environment Using Sparse Estimation. IEEE Trans. Intell. Transp. Syst. 2019, 20, 1316–1328. [Google Scholar] [CrossRef]
- Yi, B.; Lee, M.A.; Kloss, A.; Martín-Martín, R.; Bohg, J. Differentiable Factor Graph Optimization for Learning Smoothers. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Prague, Czech Republic, 27 September–1 October 2021. [Google Scholar]
- Nam, D.V.; Gon-Woo, K. Learning Type-2 Fuzzy Logic for Factor Graph Based-Robust Pose Estimation with Multi-Sensor Fusion. IEEE Trans. Intell. Transp. Syst. 2023, 24, 3809–3821. [Google Scholar] [CrossRef]
- Chang, L.; Niu, X.; Liu, T. GNSS/IMU/ODO/LiDAR-SLAM Integrated Navigation System Using IMU/ODO Pre-Integration. Sensors 2020, 20, 4702. [Google Scholar] [CrossRef]
- Bai, S.; Lai, J.; Lyu, P.; Cen, Y.; Ji, B. Improved Preintegration Method for GNSS/IMU/In-Vehicle Sensors Navigation Using Graph Optimization. IEEE Trans. Veh. Technol. 2021, 70, 11446–11457. [Google Scholar] [CrossRef]
- Kschischang, F.R.; Frey, B.J.; Loeliger, H.-A. Factor Graphs and the Sum-Product Algorithm. IEEE Trans. Inf. Theory 2001, 47, 498–519. [Google Scholar] [CrossRef]
- Barfoot, T.D. State Estimation for Robotics; Cambridge University Press: Cambridge, UK, 2017; ISBN 1-108-50971-1. [Google Scholar]
- Dellaert, F.; Kaess, M. Factor Graphs for Robot Perception. FNT Robot. 2017, 6, 1–139. [Google Scholar] [CrossRef]
- Carlone, L.; Kira, Z.; Beall, C.; Indelman, V.; Dellaert, F. Eliminating Conditionally Independent Sets in Factor Graphs: A Unifying Perspective Based on Smart Factors. In Proceedings of the 2014 IEEE International Conference on Robotics and Automation, ICRA 2014, Hong Kong, China, 31 May–7 June 2014; pp. 4290–4297. [Google Scholar]
- Kaess, M.; Ranganathan, A.; Dellaert, F. iSAM: Incremental Smoothing and Mapping. IEEE Trans. Robot. 2008, 24, 1365–1378. [Google Scholar] [CrossRef]
- Loeliger, H.-A.; Dauwels, J.; Hu, J.; Korl, S.; Ping, L.; Kschischang, F.R. The Factor Graph Approach to Model-Based Signal Processing. Proceedings of the IEEE 2007, 95, 1295–1322. [Google Scholar] [CrossRef]
- Moré, J.J. Levenberg–Marquardt Algorithm: Implementation and Theory; Springer: Berlin/Heidelberg, Germany, 1977. [Google Scholar]
- Kaess, M.; Johannsson, H.; Roberts, R.; Ila, V.; Leonard, J.; Dellaert, F. iSAM2: Incremental Smoothing and Mapping with Fluid Relinearization and Incremental Variable Reordering. In Proceedings of the 2011 IEEE International Conference on Robotics and Automation, Shanghai, China, 9–13 May 2011; pp. 3281–3288. [Google Scholar]
- Tardif, J.-P.; George, M.; Laverne, M.; Kelly, A.; Stentz, A. A New Approach to Vision-Aided Inertial Navigation. In Proceedings of the 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems, Taipei, Taiwan, 18–22 October 2010; pp. 4161–4168. [Google Scholar]
- Chang, L.; Niu, X.; Liu, T.; Tang, J.; Qian, C. GNSS/INS/LiDAR-SLAM Integrated Navigation System Based on Graph Optimization. Remote Sens. 2019, 11, 1009. [Google Scholar] [CrossRef]
- Wu, Y.; Pan, X. Velocity/Position Integration Formula Part II: Application to Strapdown Inertial Navigation Computation. IEEE Trans. Aerosp. Electron. Syst. 2013, 49, 1024–1034. [Google Scholar] [CrossRef]
- Chiu, H.-P.; Williams, S.; Dellaert, F.; Samarasekera, S.; Kumar, R. Robust Vision-Aided Navigation Using Sliding-Window Factor Graphs. In Proceedings of the 2013 IEEE International Conference on Robotics and Automation, Karlsruhe, Germany, 6–10 May 2013; pp. 46–53. [Google Scholar]
- Carlone, L. State Estimation for Robotics [Bookshelf]. IEEE Control Syst. Mag. 2019, 39, 86–88. [Google Scholar] [CrossRef]
- Hsu, L.-T.; Kubo, N.; Wen, W.; Chen, W.; Liu, Z.; Suzuki, T.; Meguro, J. UrbanNav:An Open-Sourced Multisensory Dataset for Benchmarking Positioning Algorithms Designed for Urban Areas. In Proceedings of the 34th International Technical Meeting of the Satellite Division of the Institute of Navigation, ION GNSS+ 2021, St. Louis, MO, USA, 20–24 September 2021; pp. 226–256. [Google Scholar]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Case No. | Residual | SD | Incremental Error | Diagnosis Result | Mode Judgment Result |
|---|---|---|---|---|---|
| 1 | T | T | / | T | T |
| 2 | F | F | / | F | T |
| 3 | T | F | / | F | F |
| 4 | F | T | F | F | F |
| T | T | T |
| Sensors | Parameter | Value |
|---|---|---|
| IMU | Gyro Bias instability | 0.9°/h |
| Accelerometer Bias instability | 0.01 mg | |
| Accelerometer RMS noise | 0.5 mg | |
| Gyro RMS noise | 0.007°/s | |
| GNSS RTK | Positional accuracy | 1.5 cm + 1 ppm |
| Odometer | Positional accuracy | 1% × Distance |
| Error Level | SD Criterion | Residuals Criterion | Incremental Error Criterion | Combined Method |
|---|---|---|---|---|
| Number of false detections | 276 | 151 | 69 | 74 |
| Number of missed alarms | 272 | 38 | 48 | 50 |
| Number of false positives | 4 | 113 | 21 | 24 |
| Missed alarm rate | 0.93 | 0.13 | 0.16 | 0.17 |
| False alarm rate | 0.009 | 0.14 | 0.02 | 0.02 |
| Failure Type | Group | Residuals Criterion | Incremental Error Criterion | Combined Method |
|---|---|---|---|---|
| Slope Failure | A detection | 4 s | 9 s | 4 s |
| A recovery | 38 s | 1 s | 1 s | |
| Step Failure | B detection | 1 s | 2 s | 1 s |
| B recovery | 13 s | 0 s | 0 s |
| Error | Method | STD | RMSE |
|---|---|---|---|
| East position error (m) | EKF | 2.155 | 2.248 |
| FGO | 1.304 | 2.396 | |
| AWE-FGO | 0.509 | 0.570 | |
| SAWE-FGO | 0.189 | 0.489 | |
| North position error (m) | EKF | 2.051 | 2.062 |
| FGO | 1.642 | 2.227 | |
| AWE-FGO | 0.586 | 0.954 | |
| SAWE-FGO | 0.206 | 0.208 | |
| East velocity error (m/s) | EKF | 0.721 | 0.720 |
| FGO | 0.297 | 0.410 | |
| AFGO | 0.174 | 0.206 | |
| SAWE-FGO | 0.122 | 0.132 | |
| North velocity error (m/s) | EKF | 0.393 | 0.392 |
| FGO | 0.210 | 0.409 | |
| AFGO | 0.168 | 0.206 | |
| SAWE-FGO | 0.131 | 0.078 |
| Error Level | SD Criterion | Residuals Criterion | Incremental Error Criterion | Combined Method |
|---|---|---|---|---|
| Number of false detections | 1220 | 1100 | 1470 | 980 |
| Number of missed alarms | 1210 | 430 | 900 | 720 |
| Number of false positives | 10 | 670 | 570 | 260 |
| Missed alarm rate | 0.63 | 0.22 | 0.46 | 0.37 |
| False alarm rate | 0.001 | 0.08 | 0.07 | 0.03 |
| Error | Method | STD | RMSE |
|---|---|---|---|
| East position error (m) | EKF | 3.656 | 4.115 |
| FGO | 1.438 | 2.057 | |
| AWE-FGO | 1.108 | 1.282 | |
| SAWE-FGO | 0.906 | 1.805 | |
| North position error (m) | EKF | 2.320 | 2.354 |
| FGO | 1.858 | 2.631 | |
| AWE-FGO | 1.273 | 1.605 | |
| SAWE-FGO | 1.088 | 1.509 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Quan, S.; Chen, S.; Zhou, Y.; Zhao, S.; Hu, H.; Zhu, Q. A Robust Position Estimation Method in the Integrated Navigation System via Factor Graph. Remote Sens. 2024, 16, 562. https://doi.org/10.3390/rs16030562
Quan S, Chen S, Zhou Y, Zhao S, Hu H, Zhu Q. A Robust Position Estimation Method in the Integrated Navigation System via Factor Graph. Remote Sensing. 2024; 16(3):562. https://doi.org/10.3390/rs16030562
Chicago/Turabian StyleQuan, Sihang, Shaohua Chen, Yilan Zhou, Shuai Zhao, Huizhu Hu, and Qi Zhu. 2024. "A Robust Position Estimation Method in the Integrated Navigation System via Factor Graph" Remote Sensing 16, no. 3: 562. https://doi.org/10.3390/rs16030562
APA StyleQuan, S., Chen, S., Zhou, Y., Zhao, S., Hu, H., & Zhu, Q. (2024). A Robust Position Estimation Method in the Integrated Navigation System via Factor Graph. Remote Sensing, 16(3), 562. https://doi.org/10.3390/rs16030562