Evaluation of ASTER GDEM2 in Comparison with GDEM1, SRTM DEM and Topographic-Map-Derived DEM Using Inundation Area Analysis and RTK-dGPS Data




Abstract
:
1. Introduction
2. Study Area
3. Materials and Methods
3.1. DEM Datasets
3.2. Inundation Area Analysis
3.3. Vertical Accuracy Assessment
4. Results and Discussion
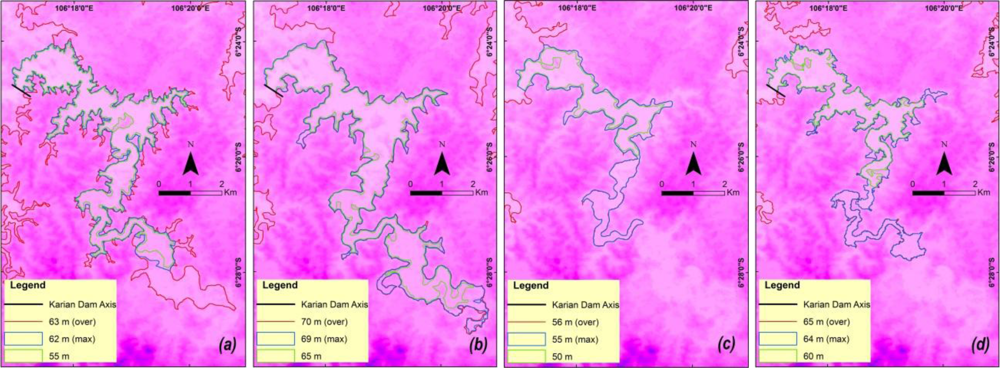
4.1. Inundation Area Analysis
4.2. Vertical Accuracy Assessment
4.2.1. The Quality of RTK-dGPS Data
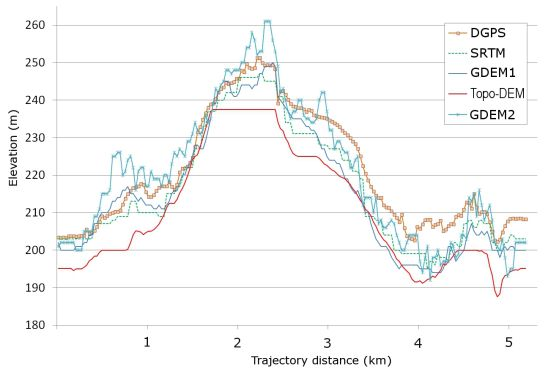
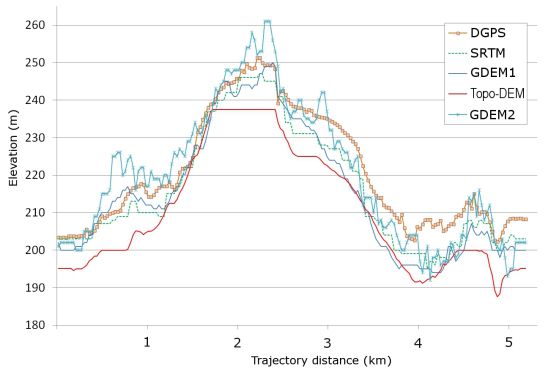
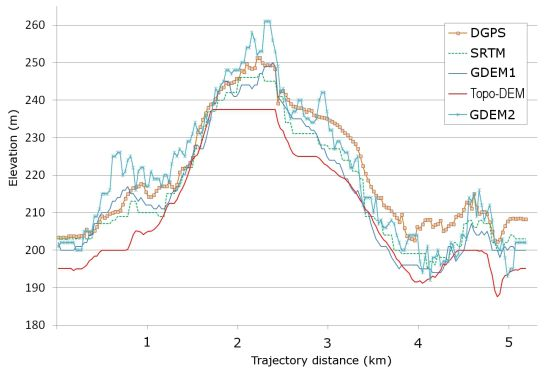
4.2.2. Vertical Accuracy of the DEMs
4.2.3. Undulation Effects
5. Conclusions
Acknowledgments
References
- Farr, T.G.; Korbick, M. Shuttle radar topography mission produces a wealth of data. Eos Trans. AGU 2000, 81, 583–585. [Google Scholar]
- Jarvis, A.; Reuter, H.I.; Nelson, A.; Guevara, E. Hole-Filled Seamless SRTM Data V4. Available online: http://srtm.csi.cgiar.org/ (accessed on 14 February 2012).
- Rodríguez, E.; Morris, C.S.; Belz, Z.E. A global assessment of the SRTM performance. Photogramm. Eng. Remote Sensing 2006, 72, 249–260. [Google Scholar]
- ASTER GDEM Validation Team. ASTER Global DEM Validation: Summary of Validation Results. Available online: http://www.ersdac.or.jp (accessed on 9 January 2012).
- Hirt, C.; Filmer, M.S.; Featherstone, W.E. Comparison and validation of the recent freely-available ASTER-GDEM ver1, SRTM ver4.1 and GEODATA DEM-9S ver3 digital elevation models over Australia. Aust. J. Earth Sci 2010, 57, 337–347. [Google Scholar]
- Tobler, W. Resolution, Resampling, and All That. In Building Data Bases for Global Science; Mounsey, H., Tomlinson, R., Eds.; Taylor and Francis: London, UK, 1988; pp. 129–137. [Google Scholar]
- Miliaresis, G.; Delikaraoglou, D. Effects of percent tree canopy density and DEM misregistration on SRTM/DEM vegetation height estimates. Remote Sens 2009, 1, 36–49. [Google Scholar]
- Manfreda, S.; di Leo, M.; Sole, A. Detection of flood prone areas using digital elevation models. J. Hydrol. Eng 2011, 16, 781–790. [Google Scholar]
- Han, K.Y.; Lee, J.T.; Park, J.H. Flood inundation analysis resulting from Levee-break. J. Hydraul. Res 1998, 5, 747–759. [Google Scholar]
- Sippel, S.J.; Hamilton, S.K.; Melack, J.M.; Choudhury, B.J. Determination of inundation area in the Amazon River floodplain using the SMMR 37 GHz polarization difference. Remote Sens. Environ 1994, 48, 70–76. [Google Scholar]
- Moojong, P.; Hwandon, J.; Minchul, S. Estimation of sediments in urban drainage areas and relation analysis between sediments and inundation risk using GIS. Water Sci. Technol 2008, 58, 811–817. [Google Scholar]
- Hagiwara, T.; Kazama, S.; Sawamoto, M. Relationship between inundation area and irrigation area on flood control in the lower Mekong River. Adv. Hydraul. Water Eng 2002, 1–2, 590–595. [Google Scholar]
- McAdoo, B.G.; Richardson, N.; Borrero, J. Inundation distances and run-up measurements from ASTER, QuickBird and SRTM data, Aceh coast, Indonesia. Int. J. Remote Sens 2007, 28, 2961–2975. [Google Scholar]
- Gamett, B.J. An Accuracy Assessment of Digital Elevation Data and Subsequent Hydrologic Delineations in Lower Relief Terrain. Idaho State University, Pocatello, ID, USA, 2010. [Google Scholar]
- Hosseinzadeh, S.R. Drainage network analysis, comparison of digital elevation model (DEM) from ASTER with high resolution satellite image and aerial photographs. Int. J. Environ. Sci. Dev 2011, 2, 194–198. [Google Scholar]
- Hengl, T.; Heuvelink, G.B.M.; van Loon, E.E. On the uncertainty of stream networks derived from elevation data: The error propagation approach. Hydrol. Earth Syst. Sci. Discuss 2010, 7, 767–799. [Google Scholar]
- Lindsay, J.B. The terrain analysis system: A tool for hydro-geomorphic applications. Hydrol. Process 2005, 19, 1123–1130. [Google Scholar]
- Mouratidis, A.; Briole, P.; Katsambalos, K. SRTM 3″ DEM (version 1, 2, 3, 4) validation by means of extensive kinematic GPS measurements: A case study from North Greece. Int. J. Remote Sens 2010, 31, 6205–6222. [Google Scholar]
- Soetadi, J. A Model for a Cadastral Land Information System for Indonesia; University of New South Wales: Sydney, NSW, Australia, 1988. [Google Scholar]
- Magellan Navigation Inc. Promark3/Promark3 RTK Reference Manual; Magellan Navigation Inc: San Dimas, CA, USA, 2005. [Google Scholar]
- Nikolakopoulos, K.G.; Kamaratakis, E.K.; Chrysoulakis, N. SRTM vs. ASTER elevation products: Comparison for two regions in Crete, Greece. Int. J. Remote Sens 2006, 27, 4819–4838. [Google Scholar]
- Kaya, F.A.; Saritaş, M. A Computer Simulation of Dilution of Precision in the Global Positioning System Using Matlab. Proceedings of the 4th International Conference on Electrical and Electronic Engineering, Bursa, Turkey, 7–11 December 2005.
- Kaplan, E.D.; Hegarty, E.J. Understanding GPS: Principles and Applications; Artech House: London, UK, 2005. [Google Scholar]
- Natural Resources Canada. Satellite Visibility and Availability. In GPS Positioning Guide; Natural Resources Canada: Ottawa, ON, Canada, 1995; pp. 15–19. [Google Scholar]
- Pryde, J.K.; Osorio, J.; Wolfe, M.L.; Heatwole, C.; Benham, B.; Cardenas, A. Comparison of Watershed Boundaries Derived from SRTM and ASTER Digital Elevation Datasets and from a Digitized Topographic Map. Proceedings of ASABE Meeting, Minneapolis, MN, USA, 17–20 June 2007.
- Kervyn, M.; Ernst, G.G.J.; Goosens, R.; Jacobs, P. Mapping volcano topography with remote sensing: ASTER vs. SRTM. Int. J. Remote Sens 2008, 29, 6515–6538. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Topo-DEM | SRTM DEM | ASTER GDEM1 | ASTER GDEM2 | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| CL | IA | WV | CL | IA | WV | CL | IA | WV | CL | IA | WV |
| 63 (over) | 70 (over) | 56 (over) | 65 (over) | ||||||||
| 62 (max) | 10.56 | 154.33 | 69 (max) | 14.81 | 177.62 | 55 (max) | 6.51 | 73.61 | 64 (max) | 8.01 | 99.75 |
| Station | RMSE (m) (α = 0.95) (Original Resolution) | RMSE (m) (α = 0.95) (Resampled to 12.5 m Resolution) | Slope | ||||||
|---|---|---|---|---|---|---|---|---|---|
| Topo-DEM | SRTM | GDEM1 | GDEM2 | Topo-DEM | SRTM | GDEM1 | GDEM2 | (%) | |
| B01 | 2.927 | 3.571 | 3.512 | 5.319 | 2.927 | 3.269 | 3.526 | 4.912 | 2.66 |
| B02 | 4.020 | 2.348 | 3.801 | 4.771 | 4.020 | 1.963 | 3.835 | 4.330 | 2.92 |
| B03 | 3.110 | 3.924 | 5.393 | 5.745 | 3.110 | 2.742 | 5.169 | 5.194 | 3.67 |
| B04 | 3.676 | 3.820 | 4.159 | 4.690 | 3.676 | 2.935 | 4.101 | 4.140 | 4.04 |
| B05 | 3.044 | 4.171 | 3.985 | 6.230 | 3.044 | 3.146 | 4.036 | 6.003 | 4.82 |
| B06 | 1.414 | 2.635 | 2.470 | 4.914 | 1.414 | 1.725 | 2.426 | 4.523 | 4.49 |
| B07 | 3.175 | 2.898 | 4.459 | 5.821 | 3.175 | 2.725 | 4.430 | 5.412 | 2.56 |
| B08 | 4.033 | 3.505 | 6.233 | 7.759 | 4.033 | 3.185 | 6.117 | 7.158 | 2.99 |
| B09 | 2.598 | 2.214 | 2.629 | 6.203 | 2.598 | 1.510 | 2.523 | 5.890 | 3.86 |
| B10 | 4.535 | 4.006 | 4.046 | 6.513 | 4.535 | 3.495 | 4.056 | 4.911 | 3.23 |
| B11 | 2.712 | 2.661 | 3.807 | 4.543 | 2.712 | 2.388 | 3.728 | 4.232 | 2.46 |
| Average | 3.204 | 3.250 | 4.045 | 5.683 | 3.204 | 2.644 | 3.995 | 5.155 | 3.43 |
Share and Cite
Suwandana, E.; Kawamura, K.; Sakuno, Y.; Kustiyanto, E.; Raharjo, B. Evaluation of ASTER GDEM2 in Comparison with GDEM1, SRTM DEM and Topographic-Map-Derived DEM Using Inundation Area Analysis and RTK-dGPS Data. Remote Sens. 2012, 4, 2419-2431. https://doi.org/10.3390/rs4082419
Suwandana E, Kawamura K, Sakuno Y, Kustiyanto E, Raharjo B. Evaluation of ASTER GDEM2 in Comparison with GDEM1, SRTM DEM and Topographic-Map-Derived DEM Using Inundation Area Analysis and RTK-dGPS Data. Remote Sensing. 2012; 4(8):2419-2431. https://doi.org/10.3390/rs4082419
Chicago/Turabian StyleSuwandana, Endan, Kensuke Kawamura, Yuji Sakuno, Eko Kustiyanto, and Beni Raharjo. 2012. "Evaluation of ASTER GDEM2 in Comparison with GDEM1, SRTM DEM and Topographic-Map-Derived DEM Using Inundation Area Analysis and RTK-dGPS Data" Remote Sensing 4, no. 8: 2419-2431. https://doi.org/10.3390/rs4082419
APA StyleSuwandana, E., Kawamura, K., Sakuno, Y., Kustiyanto, E., & Raharjo, B. (2012). Evaluation of ASTER GDEM2 in Comparison with GDEM1, SRTM DEM and Topographic-Map-Derived DEM Using Inundation Area Analysis and RTK-dGPS Data. Remote Sensing, 4(8), 2419-2431. https://doi.org/10.3390/rs4082419