Landsat-8 Operational Land Imager Design, Characterization and Performance

Abstract
:
1. Introduction
1.1. Landsat Mission Overview
1.2. Landsat-8 History
1.3. Operational Land Imager Key Requirements

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Key Instrument Parameter | Requirement |
|---|---|
| Cross-track field of view | >185 km |
| Absolute geodetic accuracy (no ground control points) | <65 m |
| Relative geodetic accuracy (no ground control points) | <25 m |
| Geometric accuracy (with ground control points) | <12 m |
| Absolute radiometric uncertainty (1-sigma) | <5% |
| Absolute reflectance uncertainty (top-of-atmosphere 1-sigma) | <3% |
| Radiometric stability over 16 days, Bands 1–8 (2-sigma) | <1% |
| Radiometric stability over 16 days Band 9 (2-sigma) | <2% |
| Polarization sensitivity (defined by linear Polarization Factor) | <0.05 |
| Pixel-to-pixel uniformity, full field | <0.5% |
| Streaking (adjacent pixel uniformity) | <0.005 |
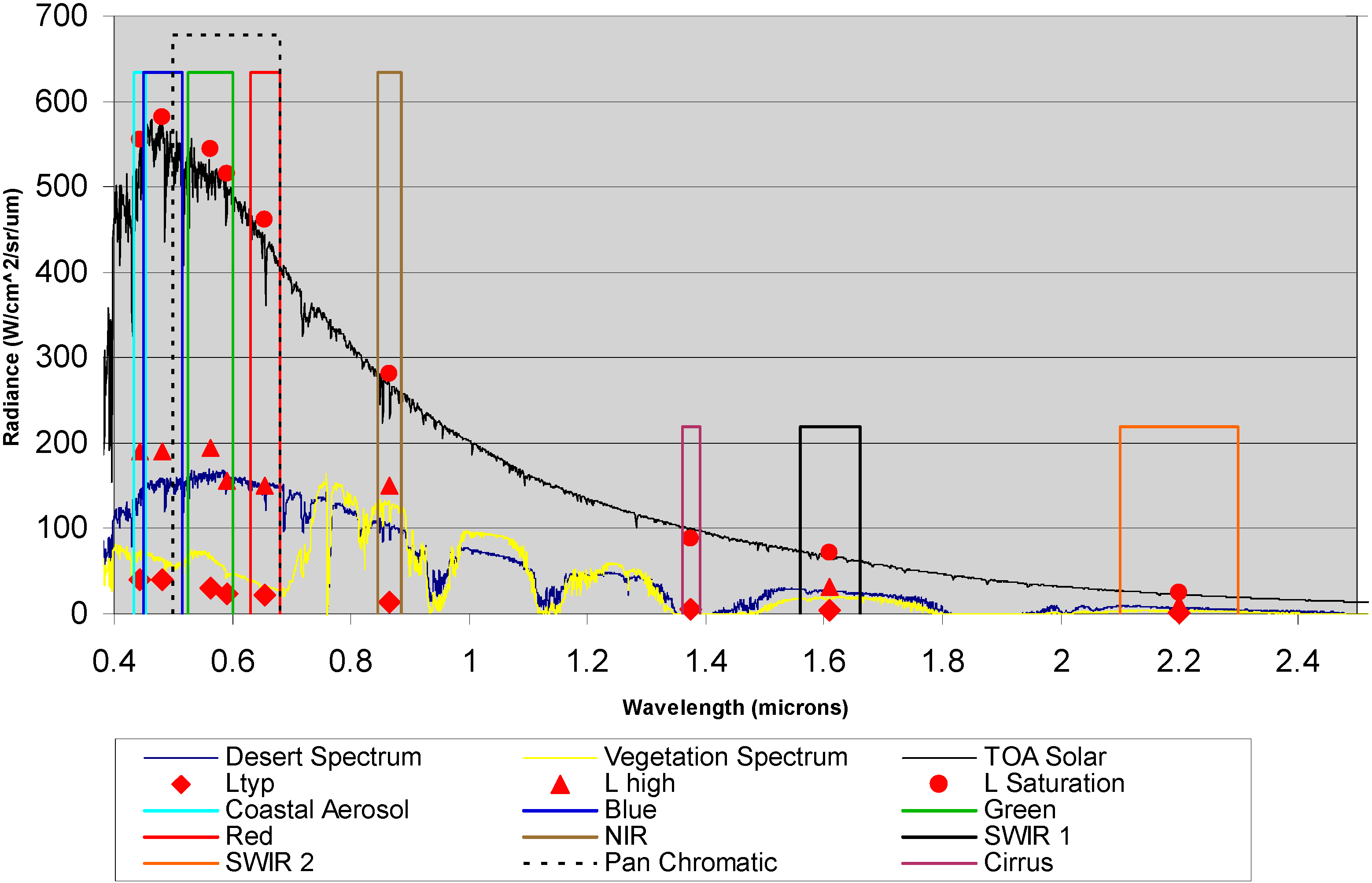
| Band Name | Center Wavelength (nm) | Bandwidth (nm) | GSD(m) | SNR |
|---|---|---|---|---|
| Coastal/Aerosol | 443 | 20 | 30 | 130 |
| Blue | 482 | 65 | 30 | 130 |
| Green | 562 | 75 | 30 | 100 |
| Red | 655 | 50 | 30 | 90 |
| NIR | 865 | 40 | 30 | 90 |
| SWIR1 * | 1610 | 100 | 30 | 100 |
| SWIR2 * | 2200 | 200 | 30 | 100 |
| Pan | 590 | 180 | 15 | 80 |
| Cirrus * | 1375 | 30 | 30 | 50 |

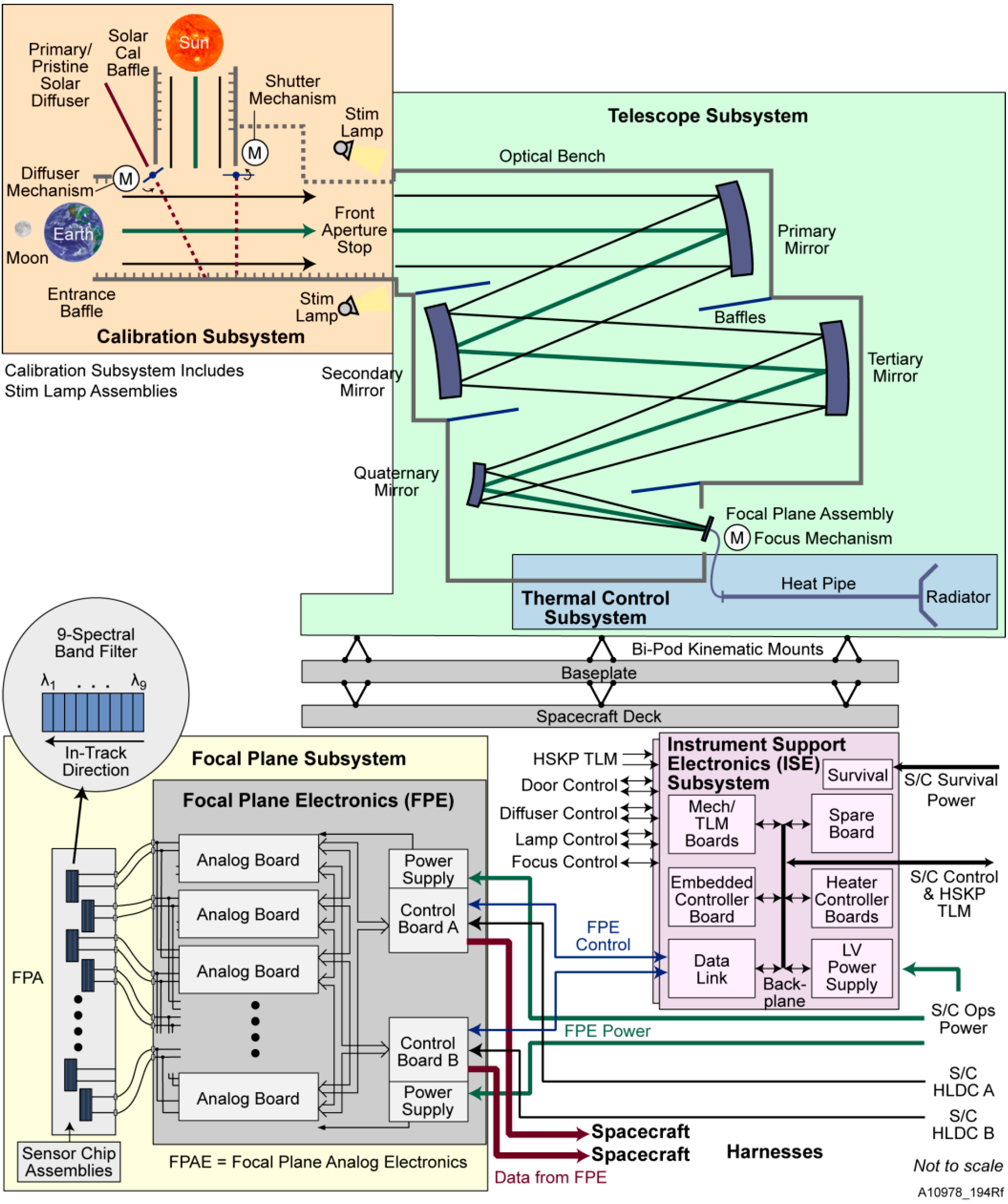
2. OLI Design Overview
2.1. Top Level Architecture


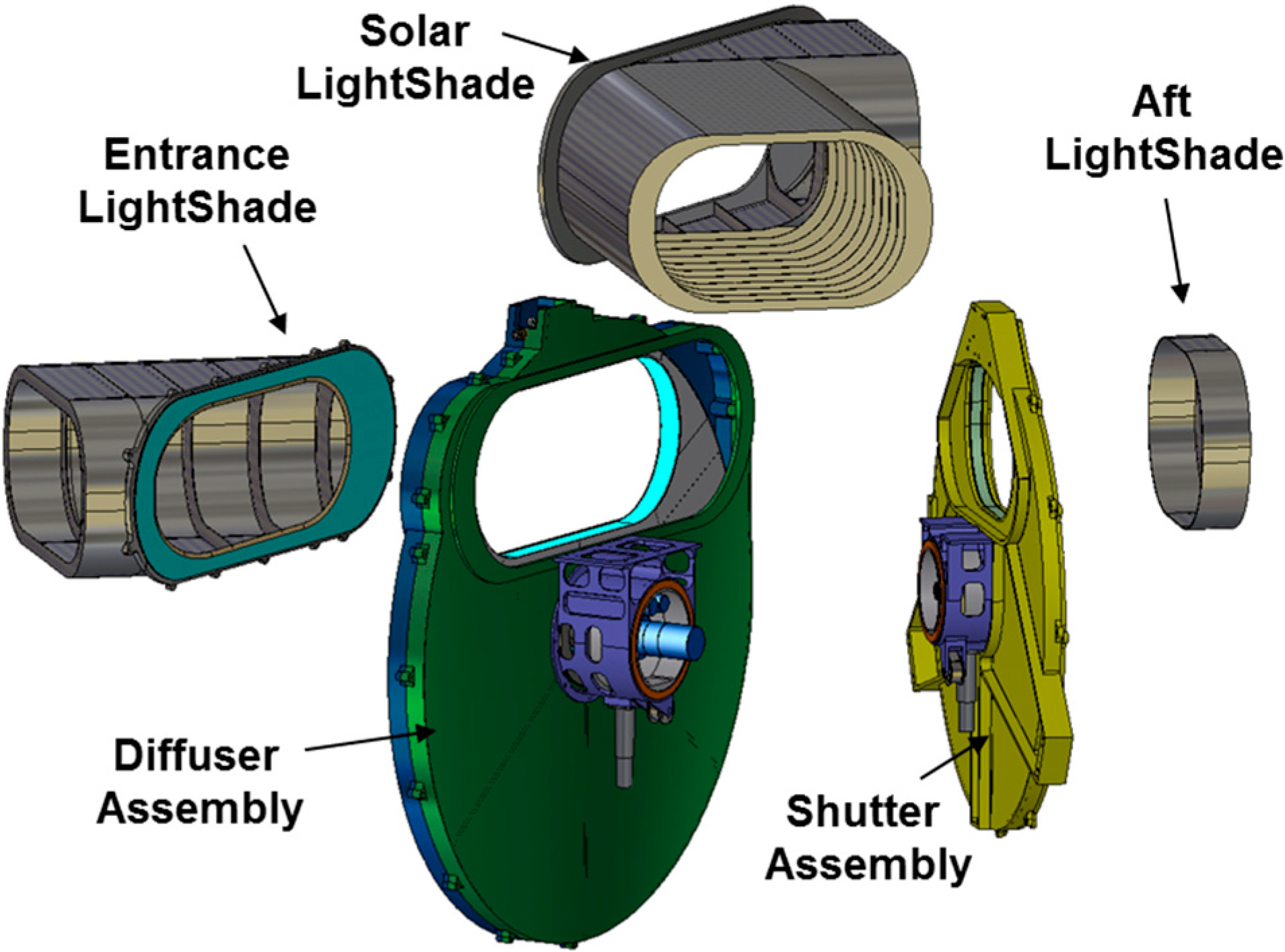
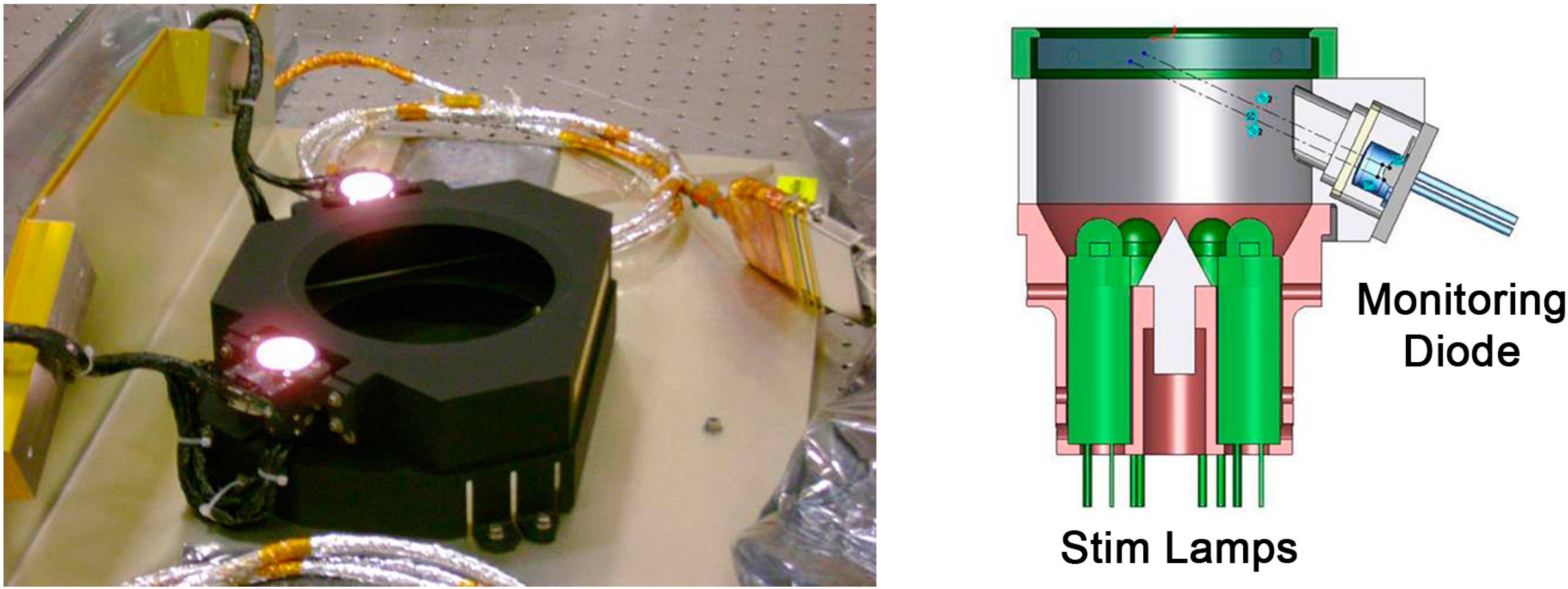
2.2. Calibration Subsystem
2.2.1. Solar Diffuser Assembly

2.2.2. Shutter Assembly
2.2.3. Stim Lamp Assemblies

2.2.4. Other Calibration Sources
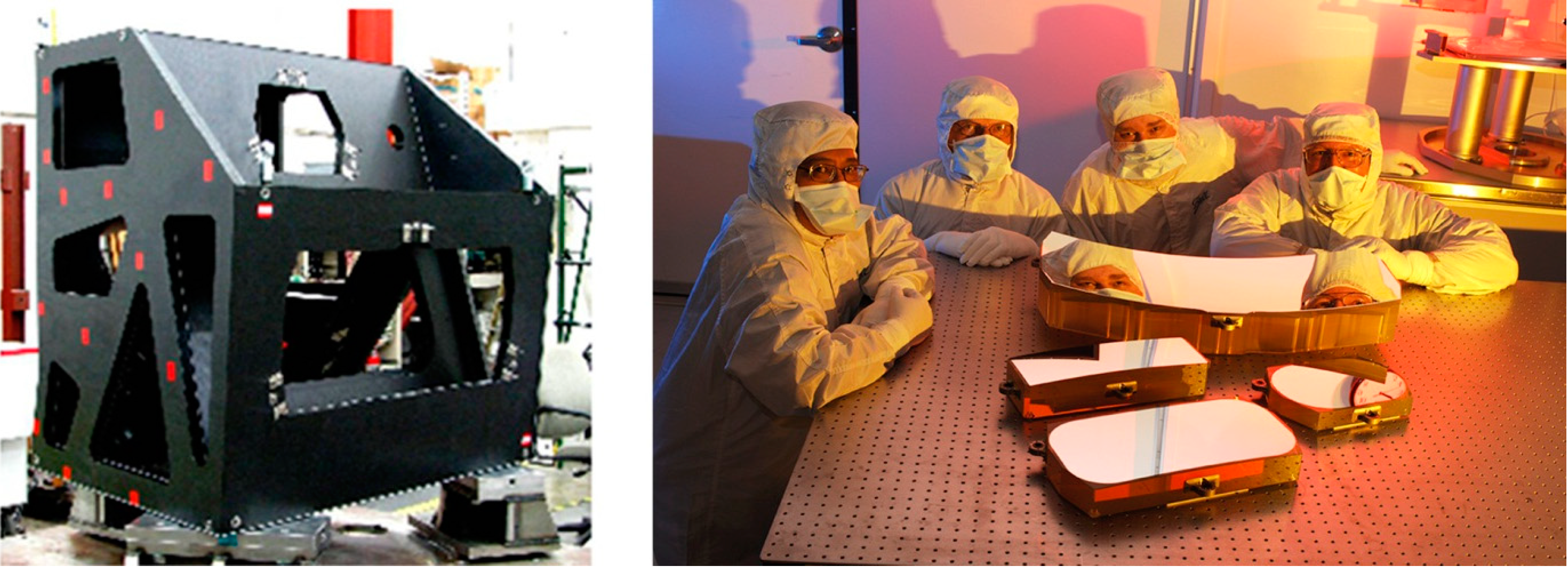
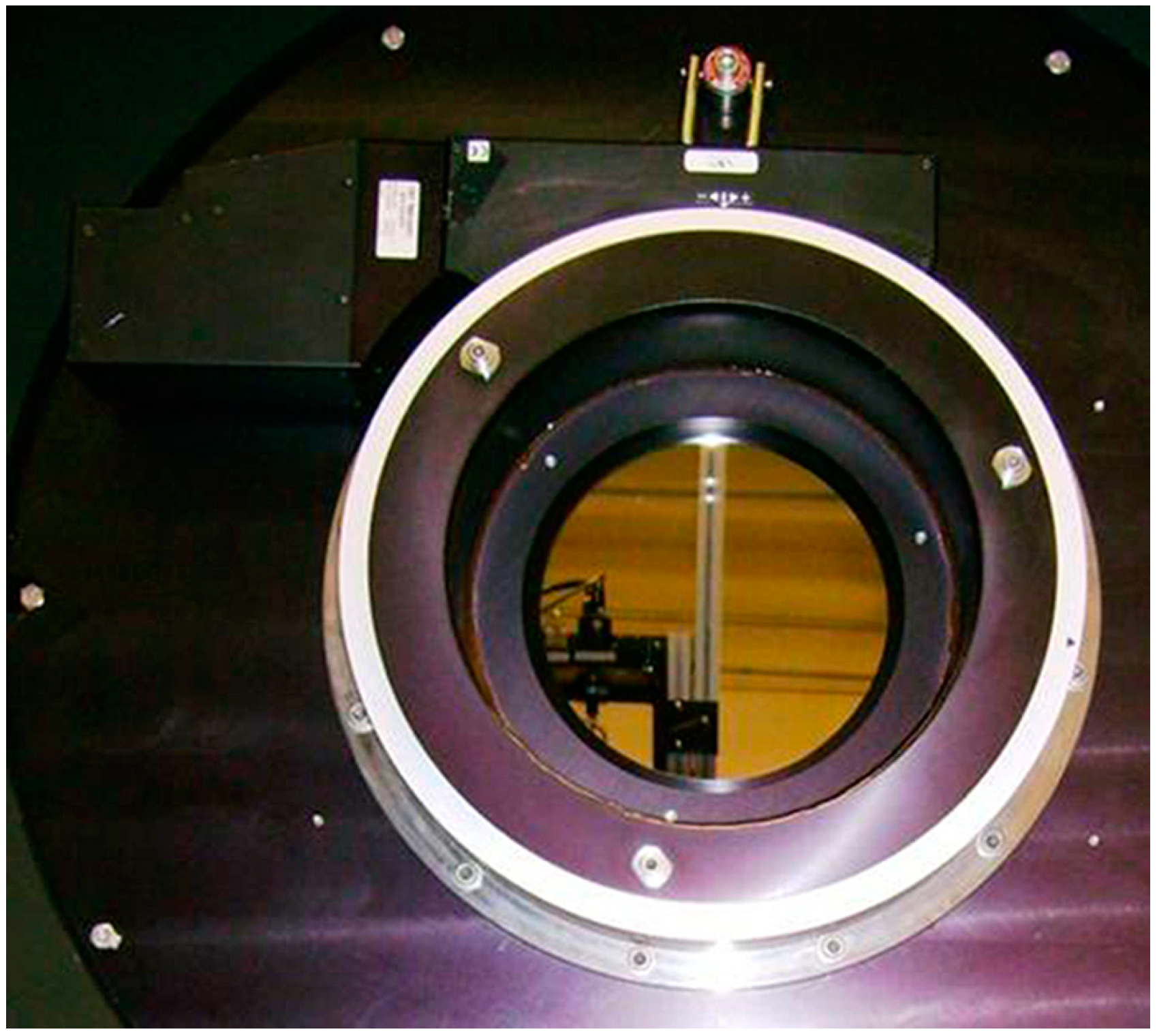
2.3. Telescope Subsystem

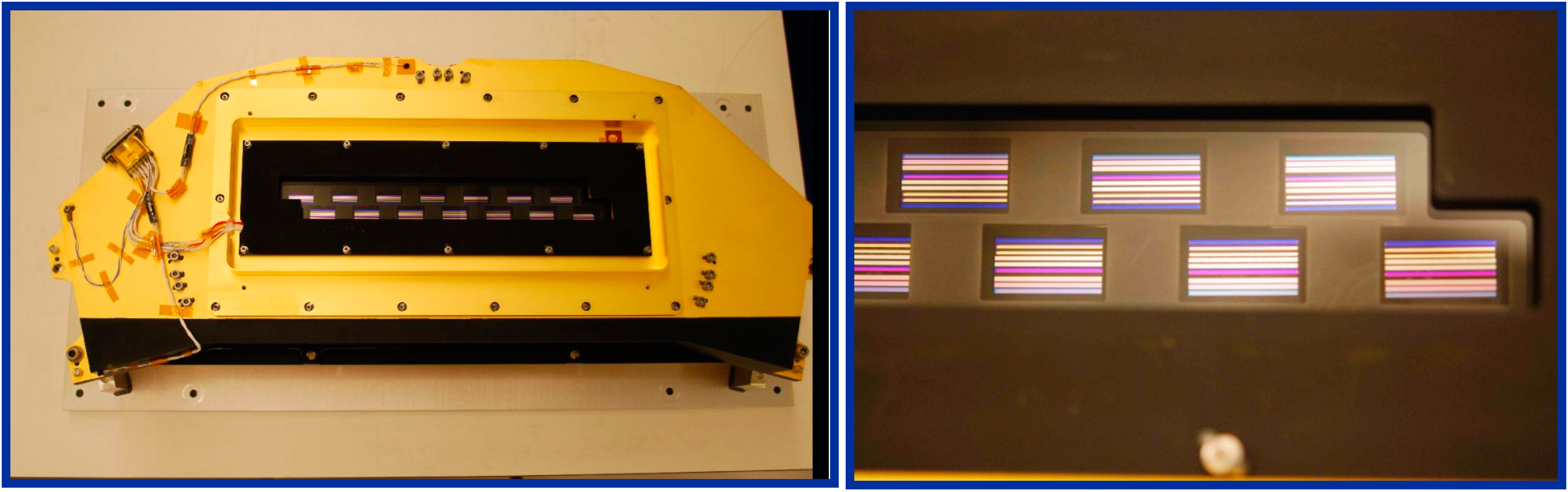
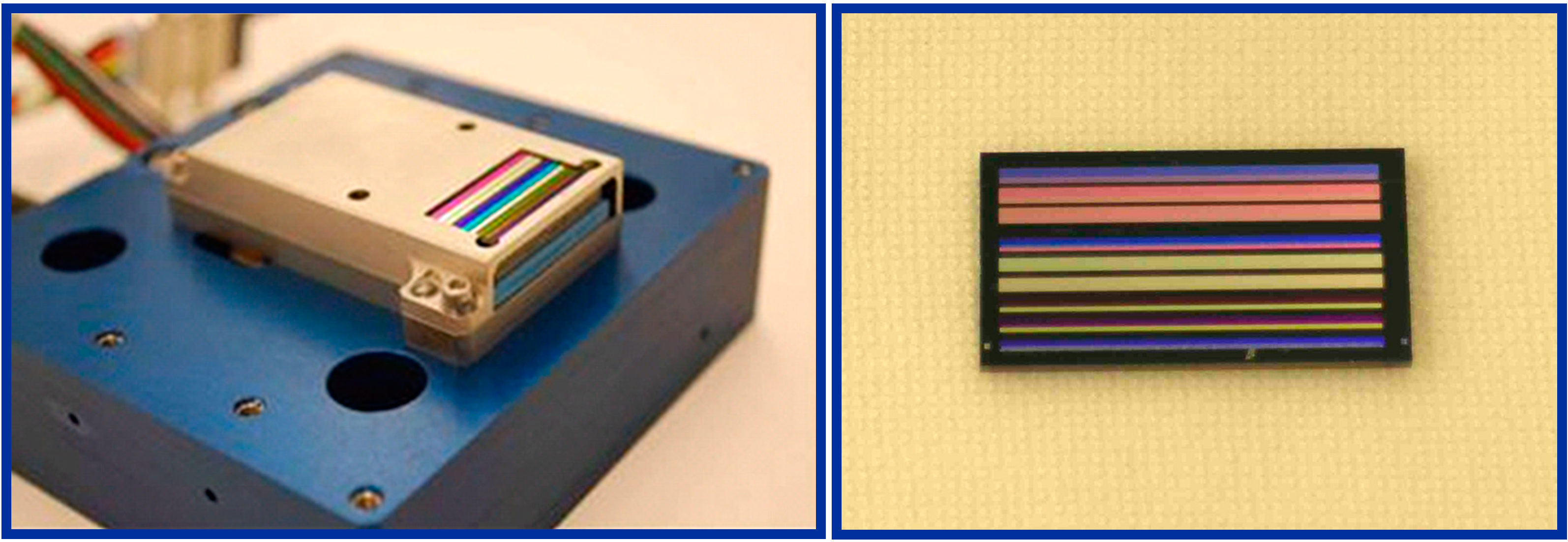
2.4. Focal Plane Subsystem (FPS)


2.5. Instrument Support Electronics

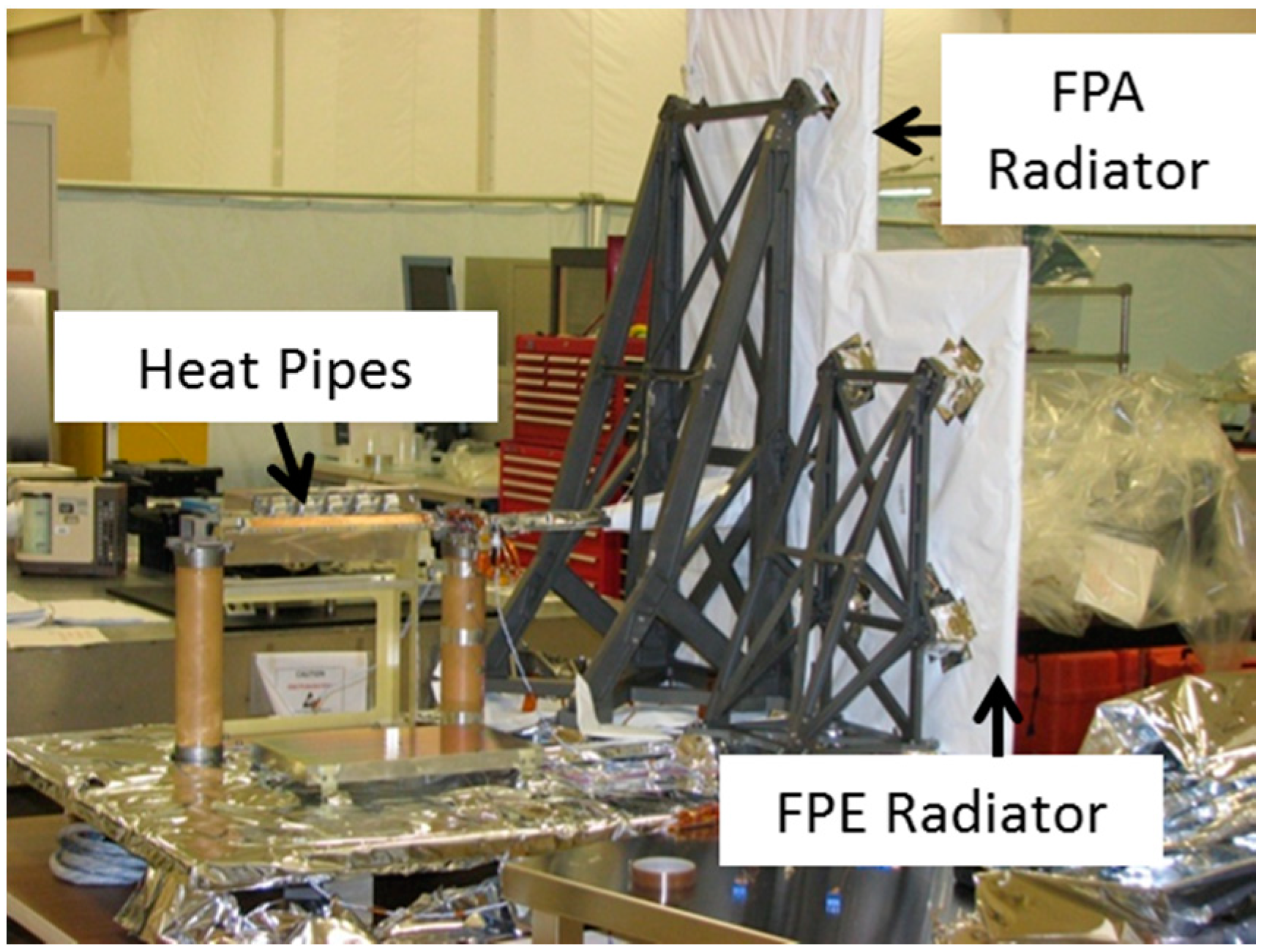
2.6. Thermal Control

3. OLI Pre-Launch Characterization and Calibration
3.1. Radiometric Characterization

3.2. Radiometric Calibration


3.3. Spatial Characterization




3.4. Spectral Characterization

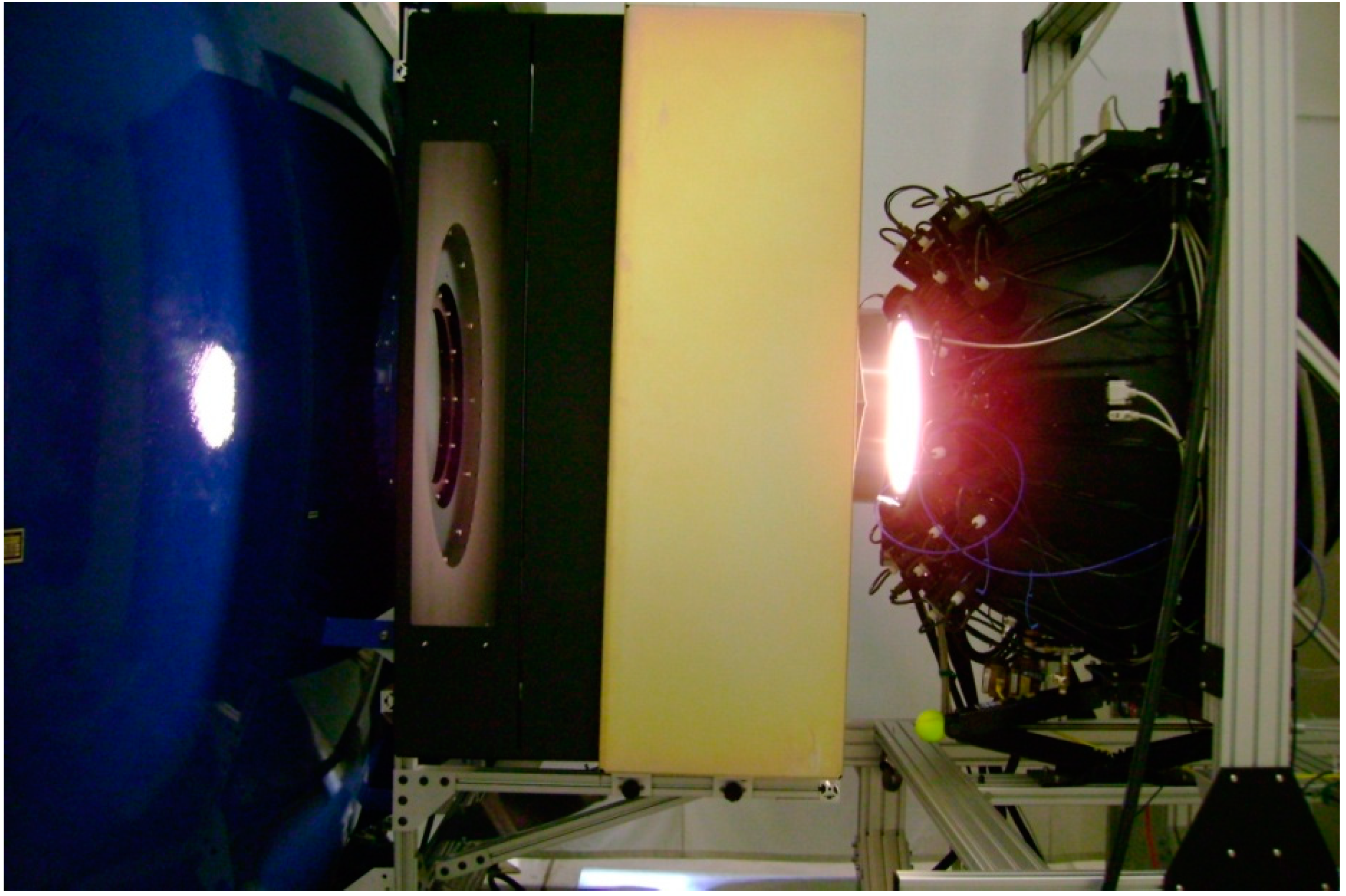
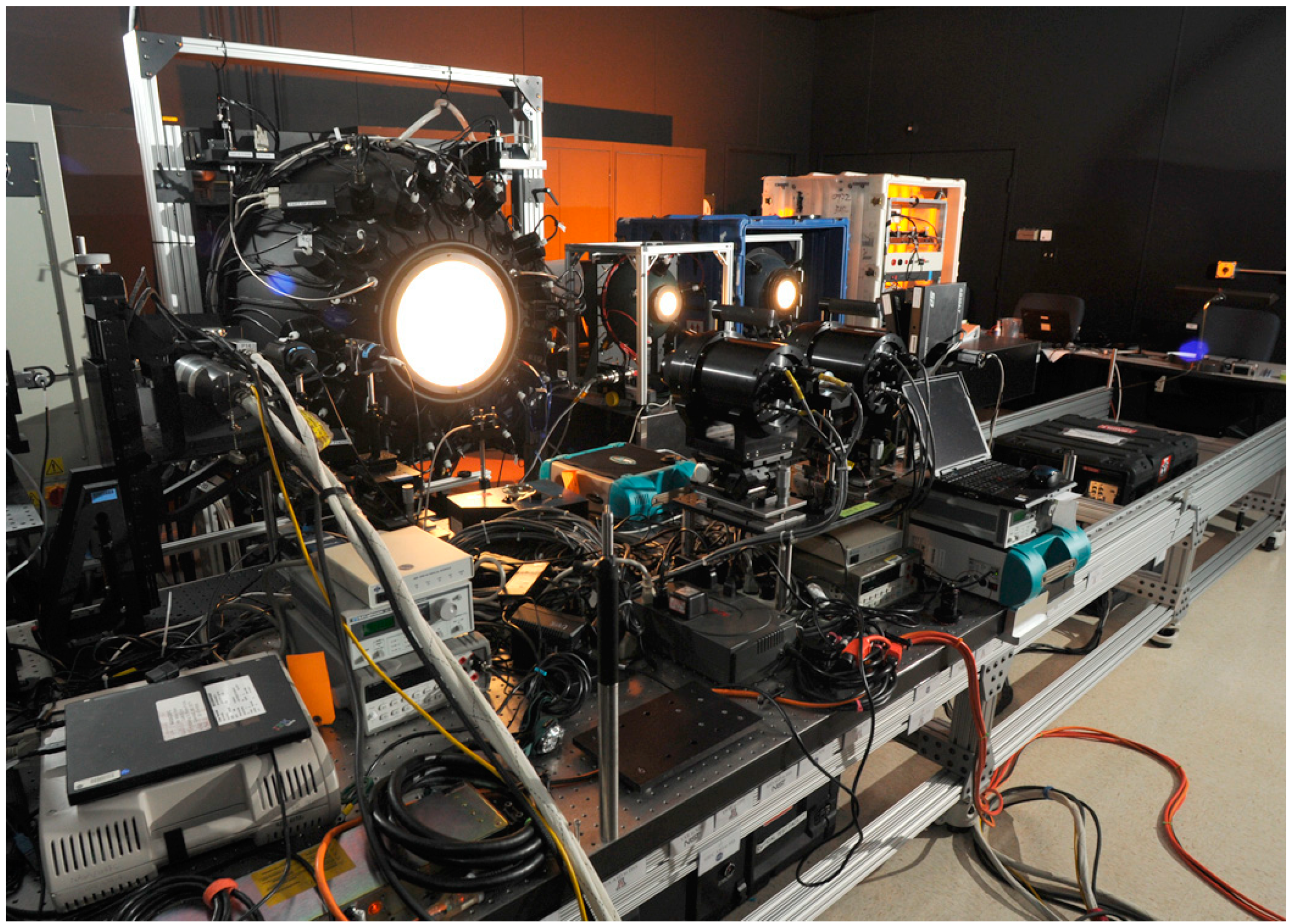
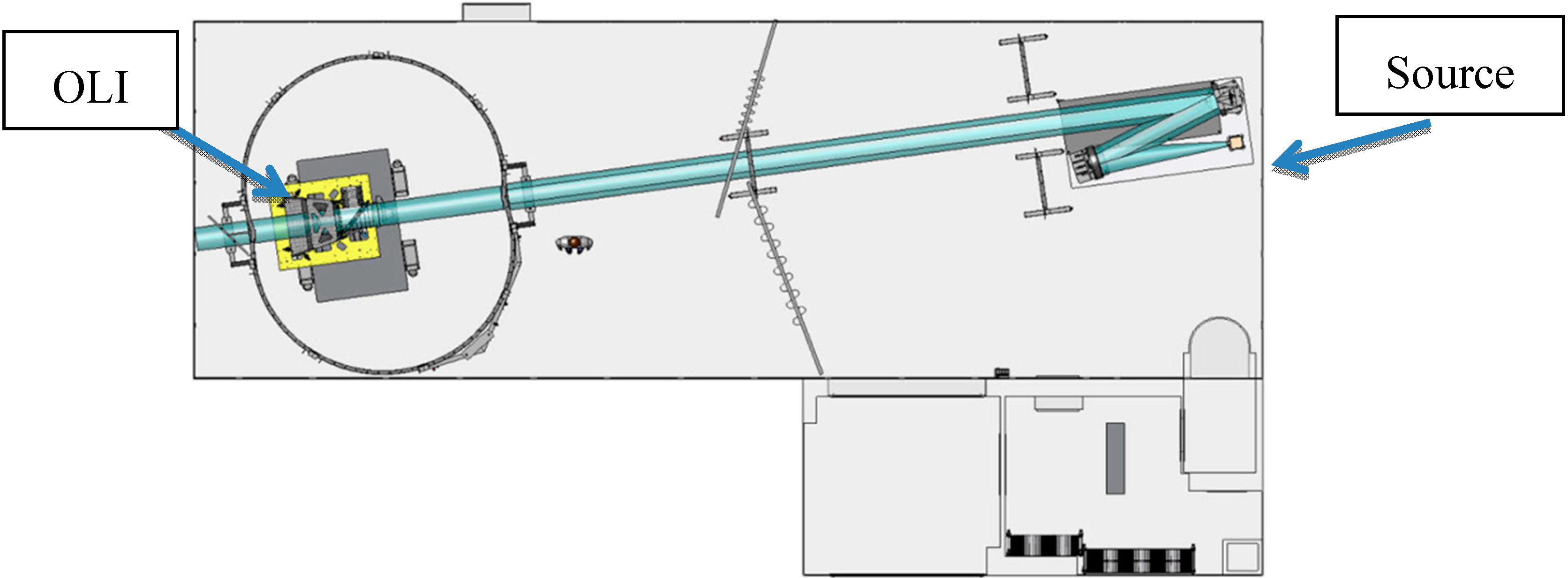
3.5. Polarization Characterization


4. OLI On-Orbit Performance
4.1. Functional Performance
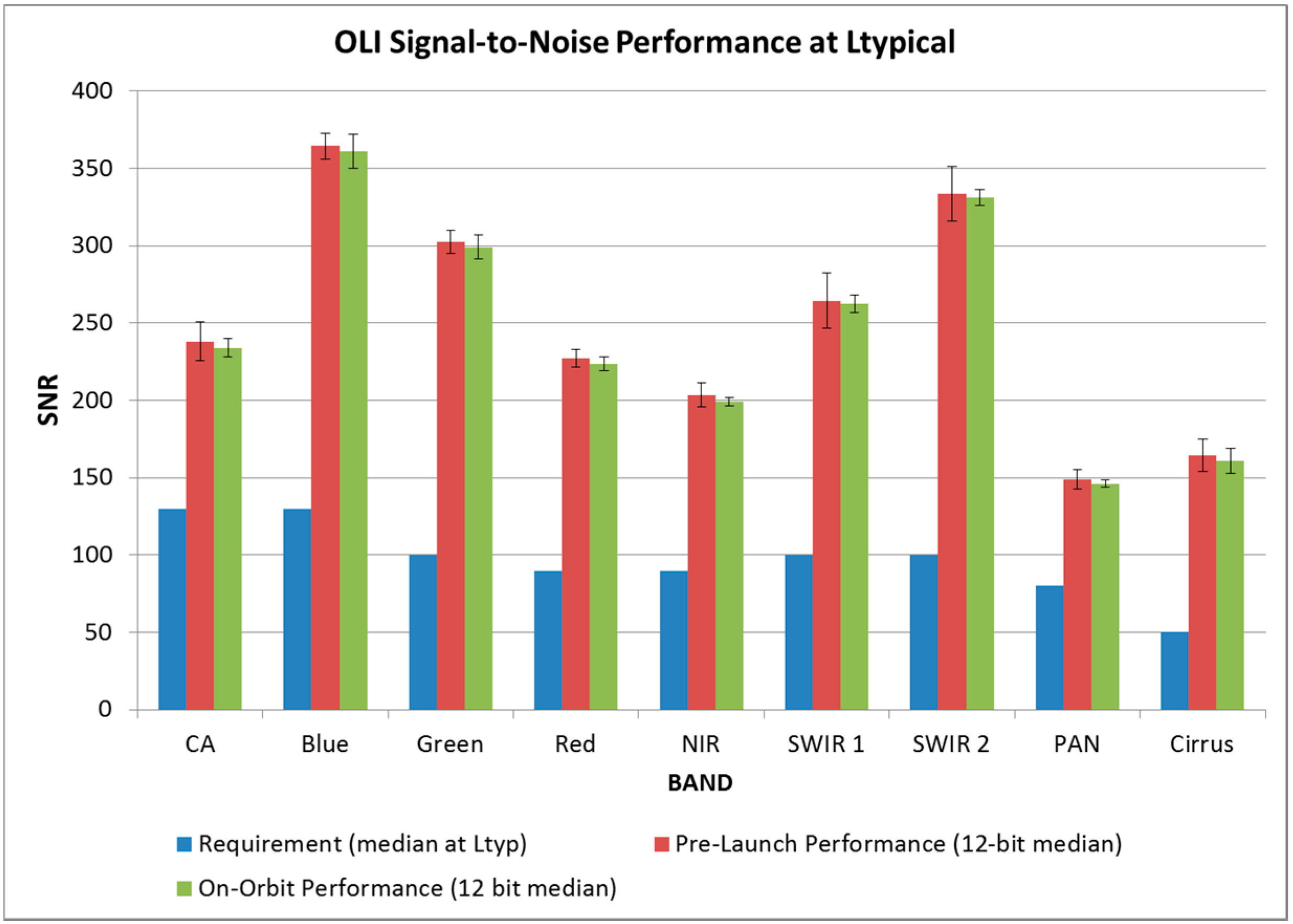
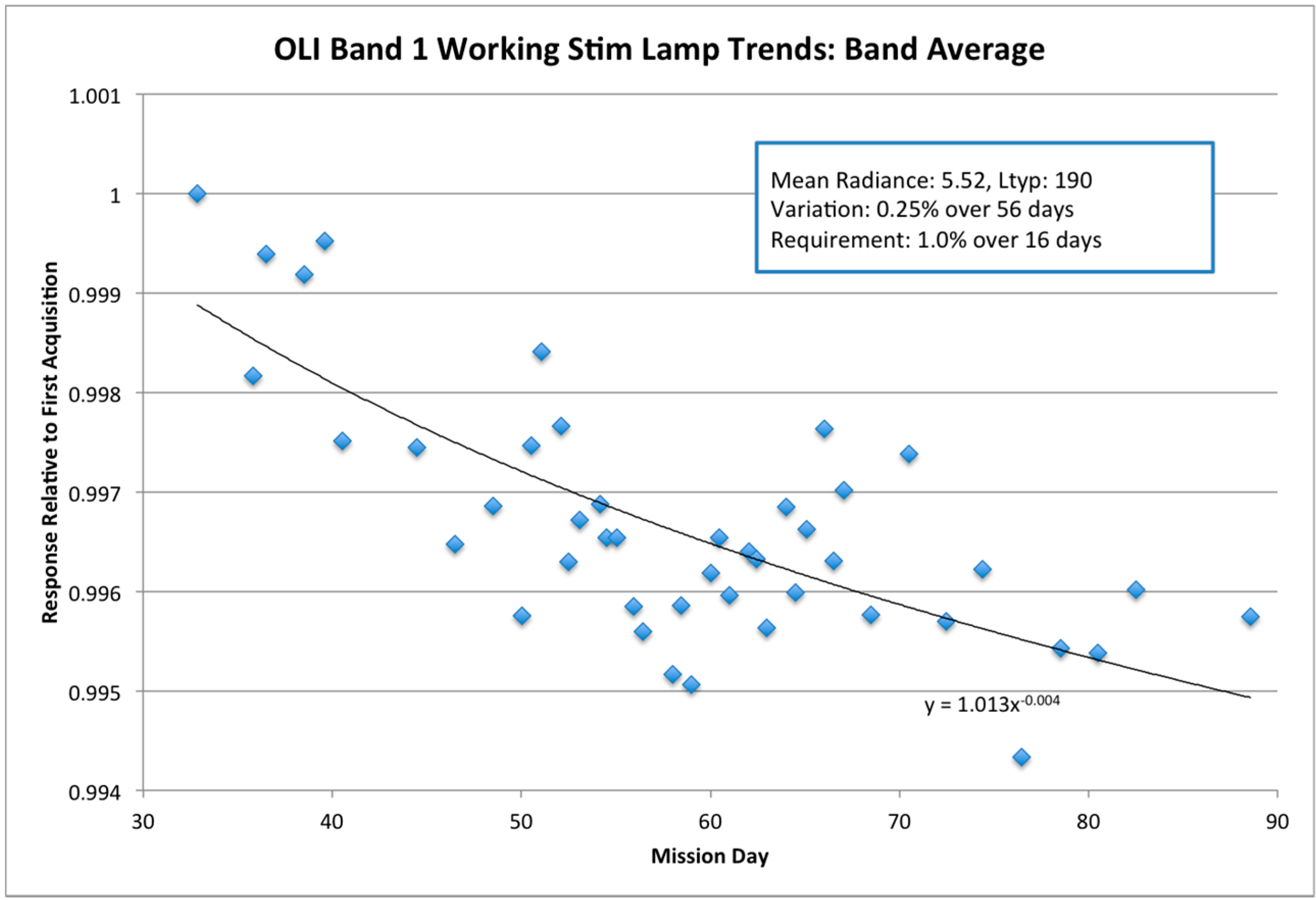
4.2. Radiometric Performance


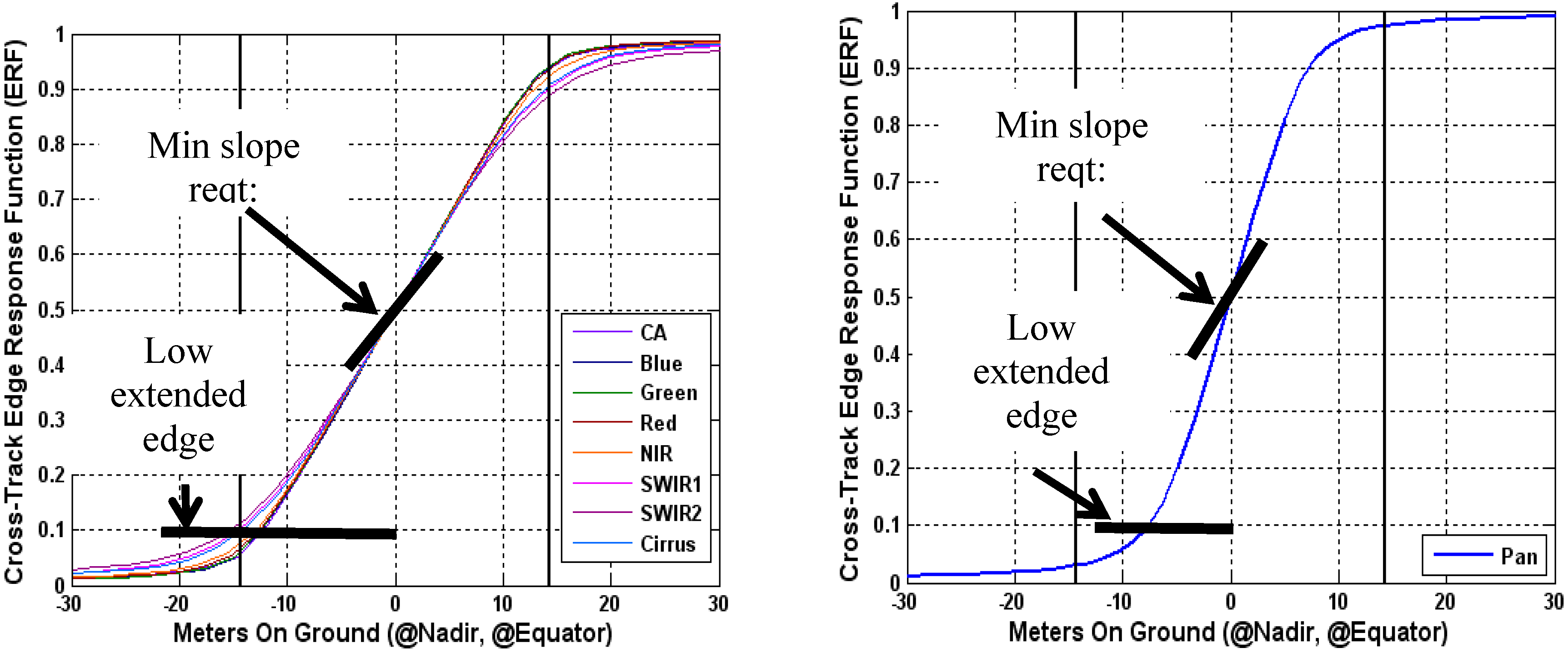
4.3. Spatial Performance


5. Summary
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Roy, D.P.; Wulder, M.A.; Loveland, T.R.; Woodcock, C.E.; Allen, R.G.; Anderson, M.C.; Helder, D.; Irons, J.R.; Johnson, D.M.; Kennedy, R.; et al. Landsat-8: Science and product vision for terrestrial global change research. Remote Sens. Environ. 2014, 145, 154–172. [Google Scholar] [CrossRef]
- Bicknell, W.E.; Digenis, C.J.; Forman, S.E.; Lencioni, D.E. EO-1 advanced land imager. Proc. SPIE 1999, 3750. [Google Scholar] [CrossRef]
- Irons, J.R.; Dwyer, J.L.; Barsi, J.A. The next Landsat satellite: The Landsat Data Continuity Mission. Remote Sens. Environ. 2012, 122, 11–21. [Google Scholar] [CrossRef]
- Storey, J.; Scaramuzza, P.; Schmidt, G.; Barsi, J. Landsat 7 scan line corrector-off gap-filled product development. In Proceedings of Pecora 16 “Global Priorities in Land Remote Sensing”, Sioux Falls, SD, USA, 23–27 October 2005.
- Tarde, R.W.; Dittman, M.G.; Kvaran, G.E. Next-generation pushbroom filter radiometers for remote sensing. Proc. SPIE 2012, 8510. [Google Scholar] [CrossRef]
- Cutlip, H.H.; Cole, J.; Johnson, B.C.; Maxwell, S.; Markham, B.; Ong, L.; Hom, M.; Biggar, S. The OLI radiometric scale realization round robin measurement campaign. In Proceedings of the Conference on Characterization and Radiometric Calibration for Remote Sensing, Logan, UT, USA, 29 August–1 September 2011.
- Biggar, S.F.; Thome, K.J.; Slater, P.N.; Holmes, A.W.; Barnes, R.A. Second SeaWiFS Preflight Solar-Radiation-Based Calibration Experiment; NASA Technical Memorandum 104566; NASA Goddard Space Flight Center: Greenbelt, MD, USA, 1995. [Google Scholar]
- Barnes, R.A.; Eplee, R.E.; Biggar, S.F.; Thome, K.J.; Zalewski, E.F.; Slater, P.N.; Holmes, A.W. The SeaWiFS Solar Radiation-Based Calibration and the Transfer-to-Orbit Experiment; NASA Technical Memorandum 206892; NASA Goddard Space Flight Center: Greenbelt, MD, USA, 1999. [Google Scholar]
- Barsi, J.A.; Lee, K.; Kvaran, G.; Markham, B.L.; Pedelty, J.A. The spectral response of the Landsat-8 Operational Land Imager. Remote Sens. 2014, 6, 10232–10251. [Google Scholar] [CrossRef]
- Markham, B.L.; Barsi, J.A.; Kvaran, G.; Ong, L.; Kaita, E.; Biggar, S.; Czapla-Myers, J.; Mishra, N.; Helder, D. Landsat-8 Operational Land Imager radiometric calibration and stability. Remote Sens. 2014, in press. [Google Scholar]
- Barrie, J.D.; Fuqua, P.D.; Meshishnek, M.J.; Ciofalo, M.R.; Chu, C.T.; Chaney, J.A.; Moision, R.M.; Graziani, L. Root cause determination of on-orbit degradation of the VIIRS rotating telescope assembly. Proc. SPIE 2012, 8510. [Google Scholar] [CrossRef]
© 2014 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Knight, E.J.; Kvaran, G. Landsat-8 Operational Land Imager Design, Characterization and Performance. Remote Sens. 2014, 6, 10286-10305. https://doi.org/10.3390/rs61110286
Knight EJ, Kvaran G. Landsat-8 Operational Land Imager Design, Characterization and Performance. Remote Sensing. 2014; 6(11):10286-10305. https://doi.org/10.3390/rs61110286
Chicago/Turabian StyleKnight, Edward J., and Geir Kvaran. 2014. "Landsat-8 Operational Land Imager Design, Characterization and Performance" Remote Sensing 6, no. 11: 10286-10305. https://doi.org/10.3390/rs61110286
APA StyleKnight, E. J., & Kvaran, G. (2014). Landsat-8 Operational Land Imager Design, Characterization and Performance. Remote Sensing, 6(11), 10286-10305. https://doi.org/10.3390/rs61110286