Long-Term Record of Sampled Disturbances in Northern Eurasian Boreal Forest from Pre-2000 Landsat Data

Abstract
:
1. Introduction
2. Study Area, Data and Methods
2.1. Study Area
2.2. Data
2.3. Methods
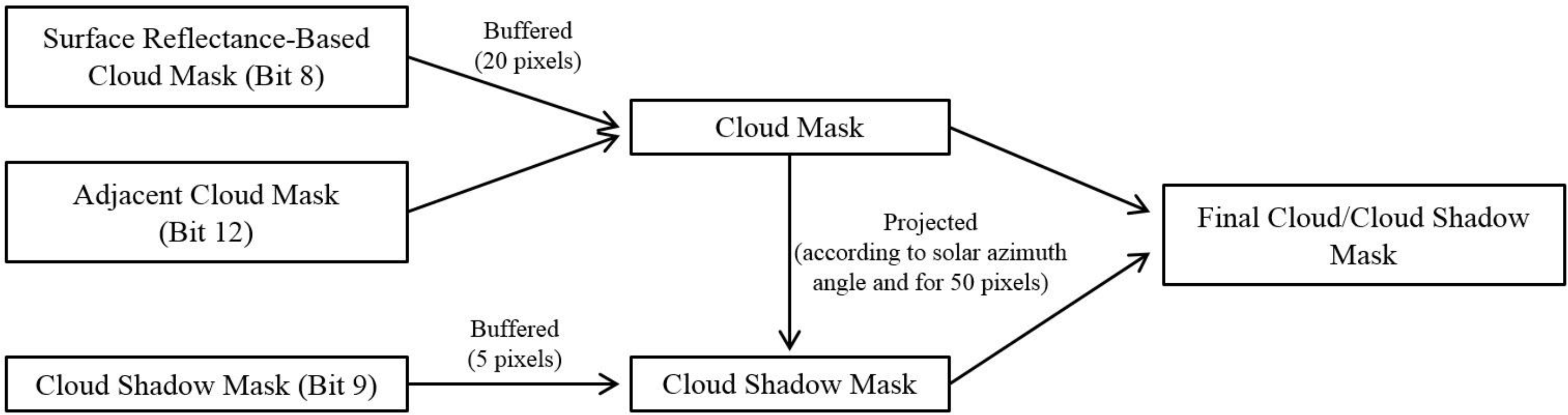
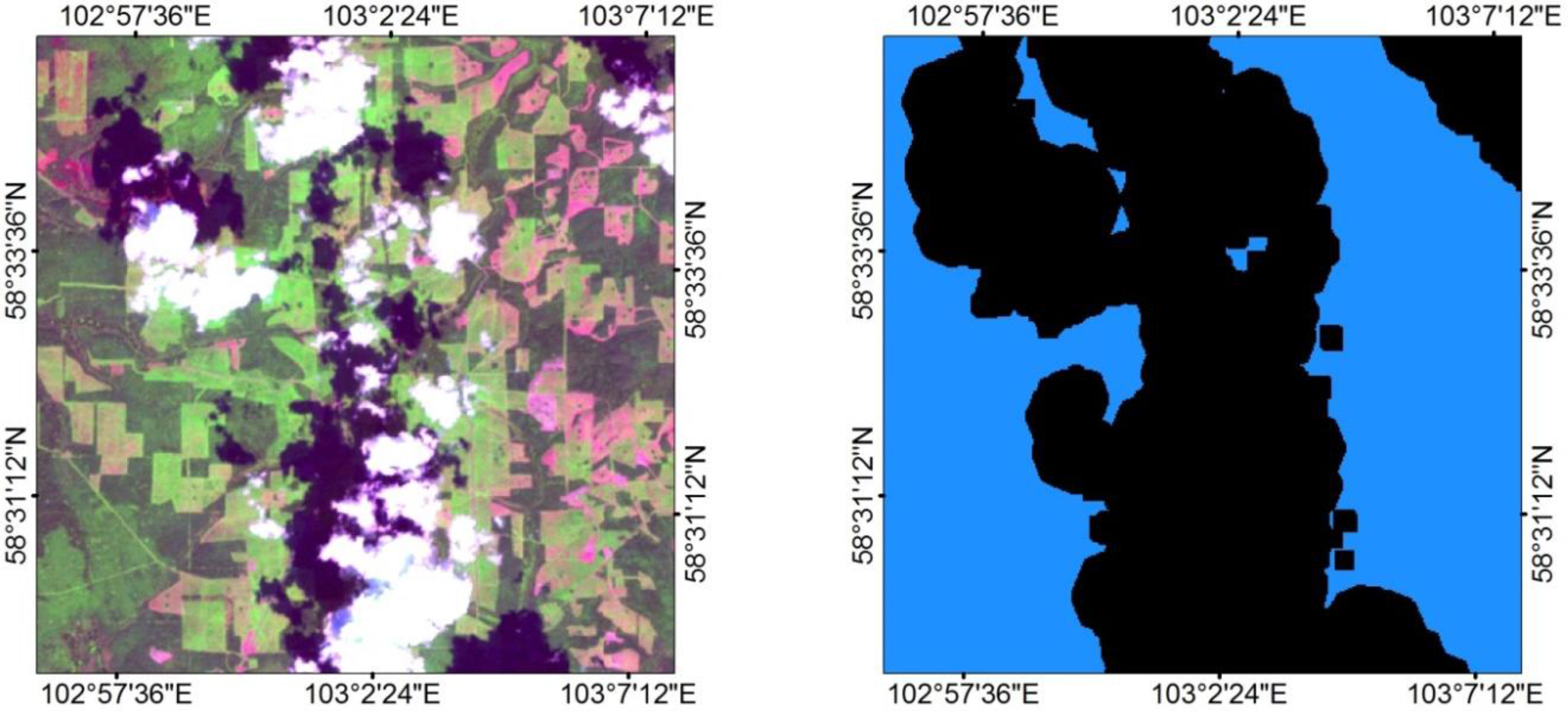
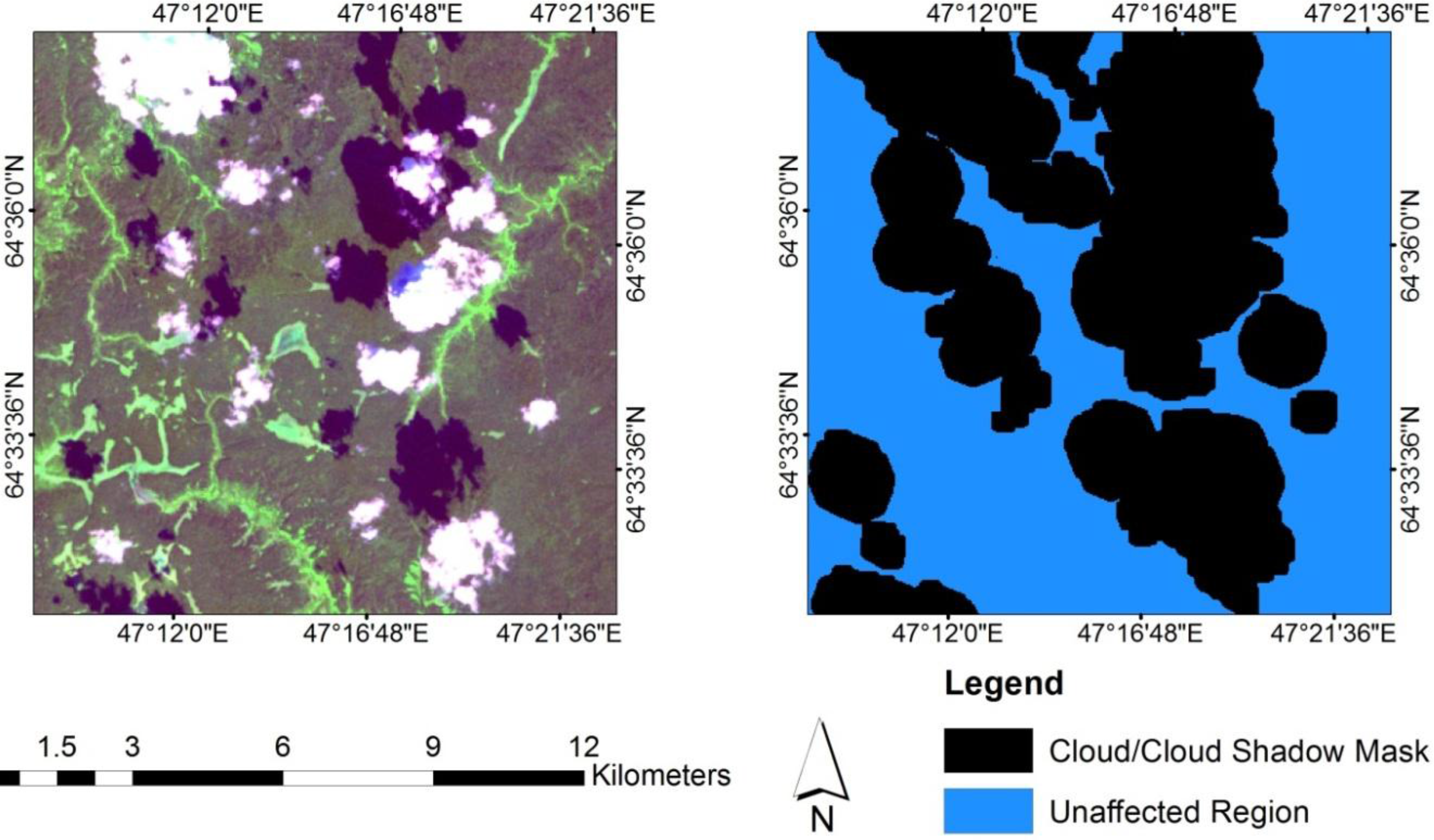
2.3.1. Image Pre-Processing and Masking
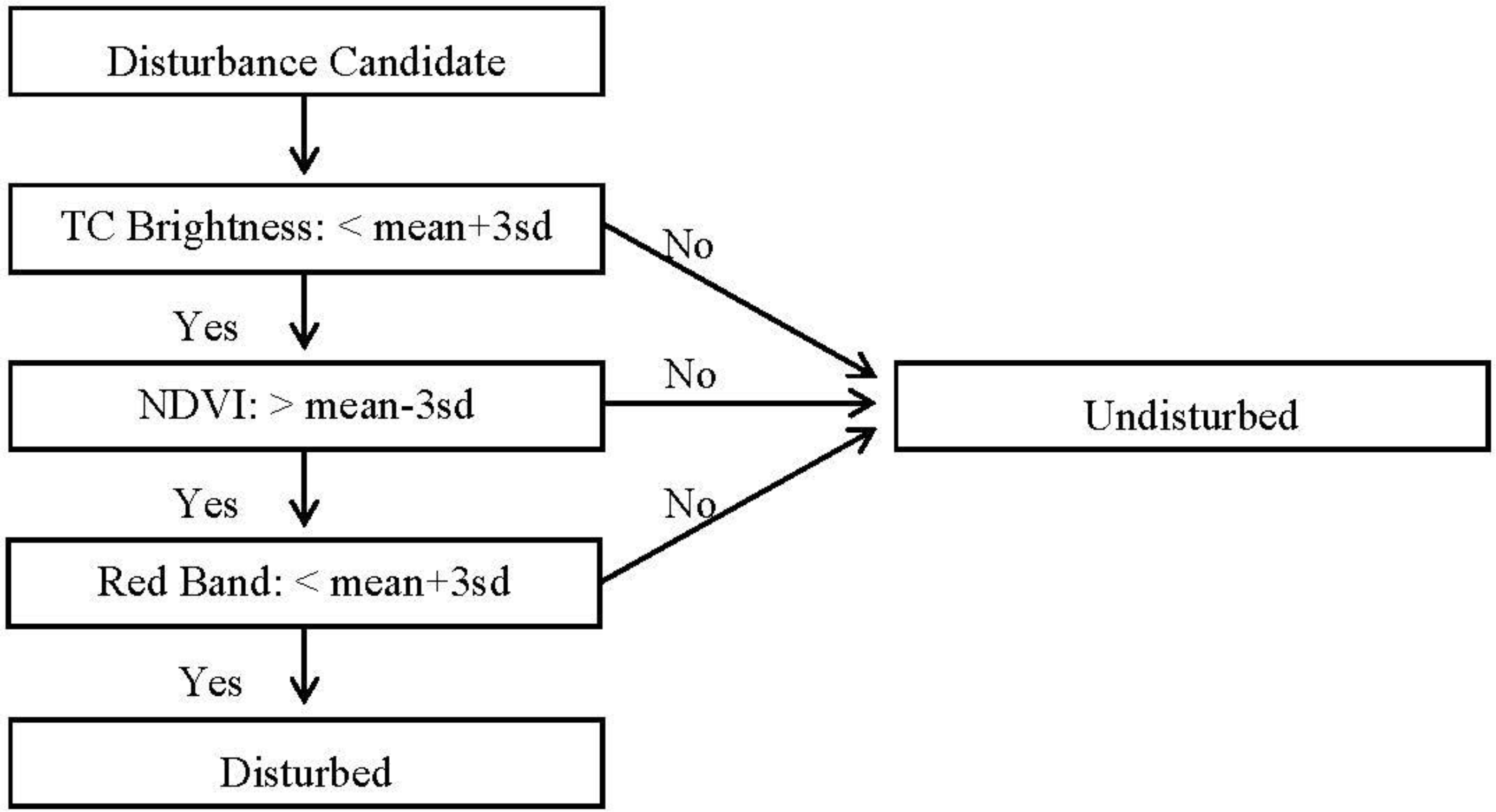
2.3.2. Disturbance Mapping
2.3.3. Accuracy Assessment
3. Results
4. Discussion
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Zhang, Q.; Pavlic, G.; Chen, W.; Latifovic, R.; Fraser, R.; Cihlar, J. Deriving stand age distribution in boreal forests using SPOT vegetation and NOAA AVHRR imagery. Remote Sens. Environ 2004, 91, 405–418. [Google Scholar]
- Goldammer, J.G.; Furyaev, V.V. Fire in Ecosystems of Boreal Eurasia: Ecological Impacts and Links to the Global System. In Fire in Ecosystems of Boreal Eurasia; Goldammer, J.G., Furyaev, V.V., Eds.; Kluwer Academic Publishers: Dordrecht, the Netherlands, 1996; Volume 48, pp. 1–20. [Google Scholar]
- Food and Agriculture Organization (FAO), Russian Federation Forest Sector Outlook Study to 2030; FAO: Rome, Italy, 2012.
- Food and Agriculture Organization (FAO), FAO Yearbook of Forest Products 2011; FAO: Rome, Italy, 2013.
- Pruitt, W.O.; Baskin, L.M. Boreal Forest of Canada and Russia; Pensoft: Sofia, Bulgaria, 2004. [Google Scholar]
- Zlotin, R. Biodiversity and Productivity of Ecosystems. In The Physical Geography of Northern Eurasia; Shahgedanova, M., Ed.; Oxford University Press: Oxford, UK, 2002. [Google Scholar]
- Magnani, F.; Mencuccini, M.; Borghetti, M.; Berbigier, P.; Berninger, F.; Delzon, S.; Grelle, A.; Hari, P.; Jarvis, P.G.; Kolari, P.; et al. The human footprint in the carbon cycle of temperate and boreal forests. Nature 2007, 447, 849–851. [Google Scholar]
- Pregitzer, K.S.; Euskirchen, E.S. Carbon cycling and storage in world forests: Biome patterns related to forest age. Glob. Chang. Biol 2004, 10, 2052–2077. [Google Scholar]
- Gower, S.T.; Krankina, O.; Olson, R.J.; Apps, M.; Linder, S.; Wang, C. Net primary production and carbon allocation patterns of boreal forest ecosystems. Ecol. Appl 2001, 11, 1395–1411. [Google Scholar]
- Amiro, B.D.; Chen, J.M.; Liu, J. Net primary productivity following forest fire for Canadian ecoregions. Can. J. For. Res 2000, 30, 939–947. [Google Scholar]
- Lyons, E.A.; Jin, Y.F.; Randerson, J.T. Changes in surface albedo after fire in boreal forest ecosystems of interior Alaska assessed using MODIS satellite observations. J. Geophys. Res. Biogeosci 2008, 113. [Google Scholar] [CrossRef]
- McMillan, A.M.S.; Goulden, M.L. Age-dependent variation in the biophysical properties of boreal forests. Glob. Biogeochem Cycle 2008, 22. [Google Scholar] [CrossRef]
- Amiro, B.D.; Orchansky, A.L.; Barr, A.G.; Black, T.A.; Chambers, S.D.; Chapin, F.S.; Gouldenf, M.L.; Litvakg, M.; Liu, H.P.; McCaughey, J.H.; et al. The effect of post-fire stand age on the boreal forest energy balance. Agric. For. Meteorol 2006, 140, 41–50. [Google Scholar]
- Randerson, J.T.; Liu, H.; Flanner, M.G.; Chambers, S.D.; Jin, Y.; Hess, P.G.; Pfister, G.; Mack, M.C.; Treseder, K.K.; Welp, L.R.; et al. The impact of boreal forest fire on climate warming. Science 2006, 314, 1130–1132. [Google Scholar]
- Bartalev, S.A.; Belward, A.S.; Erchov, D.V.; Isaev, A.S. A new SPOT4-vegetation derived land cover map of northern Eurasia. Int. J. Remote Sens 2003, 24, 1977–1982. [Google Scholar]
- Friedl, M.A.; McIver, D.K.; Hodges, J.C.F.; Zhang, X.Y.; Muchoney, D.; Strahler, A.H.; Woodcock, C.E.; Gopal, S.; Schneider, A.; Cooper, A.; et al. Global land cover mapping from MODIS: Algorithms and early results. Remote Sens. Environ 2002, 83, 287–302. [Google Scholar]
- Friedl, M.A.; Sulla-Menashe, D.; Tan, B.; Schneider, A.; Ramankutty, N.; Sibley, A.; Huang, X.M. MODIS collection 5 global land cover: Algorithm refinements and characterization of new datasets. Remote Sens. Environ 2010, 114, 168–182. [Google Scholar]
- Hansen, M.C.; DeFries, R.S.; Townshend, J.R.G.; Carroll, M.; Dimiceli, C.; Sohlberg, R.A. Development of 500 Meter Vegetation Continuous Field Maps Using MODIS Data. Proceedings of the IEEE International Geoscience and Remote Sensing Symposium (IGARSS ’03), Toulouse, France,, 21–25 July 2003; 261, pp. 264–266.
- Sexton, J.O.; Song, X.-P.; Feng, M.; Noojipady, P.; Anand, A.; Huang, C.; Kim, D.-H.; Collins, K.M.; Channan, S.; DiMiceli, C.; et al. Global, 30-m resolution continuous fields of tree cover: Landsat-based rescaling of MODIS vegetation continuous fields with Lidar-based estimates of error. Int. J. Digit. Earth 2013, 6, 427–448. [Google Scholar]
- Hansen, M.C.; Potapov, P.V.; Moore, R.; Hancher, M.; Turubanova, S.A.; Tyukavina, A.; Thau, D.; Stehman, S.V.; Goetz, S.J.; Loveland, T.R.; et al. High-resolution global maps of 21st-century forest cover change. Science 2013, 342, 850–853. [Google Scholar]
- Roy, D.P.; Jin, Y.; Lewis, P.E.; Justice, C.O. Prototyping a global algorithm for systematic fire-affected area mapping using MODIS time series data. Remote Sens. Environ 2005, 97, 137–162. [Google Scholar]
- Roy, D.P.; Boschetti, L.; Justice, C.O.; Ju, J. The collection 5 MODIS burned area product—Global evaluation by comparison with the MODIS active fire product. Remote Sens. Environ 2008, 112, 3690–3707. [Google Scholar]
- Roy, D.P.; Lewis, P.E.; Justice, C.O. Burned area mapping using multi-temporal moderate spatial resolution data—A bi-directional reflectance model-based expectation approach. Remote Sens. Environ 2002, 83, 263–286. [Google Scholar]
- Giglio, L.; Loboda, T.; Roy, D.P.; Quayle, B.; Justice, C.O. An active-fire based burned area mapping algorithm for the MODIS sensor. Remote Sens. Environ 2009, 113, 408–420. [Google Scholar]
- Tansey, K.; Grégoire, J.-M.; Stroppiana, D.; Sousa, A.; Silva, J.; Pereira, J.M.C.; Boschetti, L.; Maggi, M.; Brivio, P.A.; Fraser, R.; et al. Vegetation burning in the year 2000: Global burned area estimates from SPOT vegetation data. J. Geophys. Res. Atmos 2004, 109. [Google Scholar] [CrossRef]
- Tansey, K.; Grégoire, J.-M.; Defourny, P.; Leigh, R.; Pekel, J.-F.; van Bogaert, E.; Bartholomé, E. A new, global, multi-annual (2000–2007) burnt area product at 1 km resolution. Geophys. Res. Lett 2008, 35. [Google Scholar] [CrossRef]
- Simon, M.; Plummer, S.; Fierens, F.; Hoelzemann, J.J.; Arino, O. Burnt area detection at global scale using ATSR-2: The globscar products and their qualification. J. Geophys. Res. Atmos 2004, 109. [Google Scholar] [CrossRef]
- Plummer, S.; Arino, O.; Simon, M.; Steffen, W. Establishing a earth observation product service for the terrestrial carbon community: The globcarbon initiative. Mitig. Adapt. Strateg. Glob. Chang 2006, 11, 97–111. [Google Scholar]
- Plummer, S.; Arino, O.; Ranera, F.; Tansey, K.; Jing, C.; Dedieu, G.; Eva, H.; Piccolini, I.; Leigh, R.; Borstlap, G.; et al. The Glob Carbon Initiative Global Biophysical Products for Terrestrial Carbon Studies. Proceedings of the IEEE International Geoscience and Remote Sensing Symposium (IGARSS 2007, Barcelona, Spain, 23–28 July 2007; pp. 2408–2411.
- Sukhinin, A.I.; French, N.H.F.; Kasischke, E.S.; Hewson, J.H.; Soja, A.J.; Csiszar, I.A.; Hyer, E.J.; Loboda, T.; Conrad, S.G.; Romasko, V.I.; et al. AVHRR-based mapping of fires in Russia: New products for fire management and carbon cycle studies. Remote Sens. Environ 2004, 93, 546–564. [Google Scholar]
- Bartalev, S.A.; Egorov, V.A.; Loupian, E.A.; Uvarov, I.A. Multi-year circumpolar assessment of the area burnt in boreal ecosystems using SPOT-VEGETATION. Int. J. Remote Sens 2007, 28, 1397–1404. [Google Scholar]
- Loboda, T.; O’Neal, K.J.; Csiszar, I. Regionally adaptable dNBR-based algorithm for burned area mapping from MODIS data. Remote Sens. Environ 2007, 109, 429–442. [Google Scholar]
- Loboda, T.V.; Zhang, Z.; O’Neal, K.J.; Sun, G.; Csiszar, I.A.; Shugart, H.H.; Sherman, N.J. Reconstructing disturbance history using satellite-based assessment of the distribution of land cover in the Russian far east. Remote Sens. Environ 2012, 118, 241–248. [Google Scholar]
- Pedelty, J.; Devadiga, S.; Masuoka, E.; Brown, M.; Pinzon, J.; Tucker, C.; Roy, D.; Junchang, J.; Vermote, E.; Prince, S.; et al. Generating a Long-Term Land Data Record from the AVHRR and MODIS Instruments. Proceedings of the IEEE International Geoscience and Remote Sensing Symposium (IGARSS 2007), Barcelona, Spain, 23–28 July 2007; pp. 1021–1025.
- Tishkov, A. Boreal Forests. In The Physical Geography of Northern Eurasia; Shahgedanova, M., Ed.; Oxford University Press: New York, NY, USA, 2002; pp. 216–233. [Google Scholar]
- Shahgedanova, M. Climate at Present and in the Historical Past. In The Physical Geography of Northern Eurasia; Shahgedanova, M., Ed.; Oxford University Press: New York, NY, USA, 2002; pp. 70–102. [Google Scholar]
- Osawa, A.; Zyryanova, O.A. Introduction. In Permafrost Ecosystems: Siberian Larch Forests; Osawa, A., Zyryanova, O.A., Matsuura, Y., Kajimoto, T., Wein, R.W., Eds.; Springer: New York, NY, USA, 2010; Volume 209, pp. 3–15. [Google Scholar]
- Goldammer, J.G.; Stocks, B.J. Eurasian Perspective of Fire: Dimension, Management, Policies, and Scientific Requirements. In Fire, Climate Change, and Carbon Cycling in the Boreal Forest; Kasischke, E.S., Stocks, B.J., Eds.; Springer: London, UK, 2000; pp. 49–65. [Google Scholar]
- Danilin, I.; Crow, T. The Great Siberian Forest: Challenges and Opportunities of Scale. In Patterns and Processes in Forest Landscapes; Lafortezza, R., Sanesi, G., Chen, J., Crow, T., Eds.; Springer: Dordrecht, The Netherland, 2008; pp. 47–66. [Google Scholar]
- Potapov, P.; Turubanova, S.; Zhuravleva, I.; Hansen, M.; Yaroshenko, A.; Manisha, A. Forest cover change within the Russian European north after the breakdown of soviet union (1990–2005). Int. J. For. Res 2012, 2012. [Google Scholar] [CrossRef]
- Hansen, M.; DeFries, R.; Townshend, J.R.; Carroll, M.; Dimiceli, C.; Sohlberg, R. Percent Tree Cover, Collection 4, Vegetation Continuous Fields MOD44B. Available online: http://glcf.umd.edu/data/vcf/ (accessed on 4 May 2014).
- Masek, J.G.; Vermote, E.F.; Saleous, N.E.; Wolfe, R.; Hall, F.G.; Huemmrich, K.F.; Feng, G.; Kutler, J.; Teng-Kui, L. A Landsat surface reflectance dataset for North America, 1990–2000. IEEE Geosci. Remote Sens. Lett 2006, 3, 68–72. [Google Scholar]
- Feng, M.; Sexton, J.O.; Huang, C.; Masek, J.G.; Vermote, E.F.; Gao, F.; Narasimhan, R.; Channan, S.; Wolfe, R.E.; Townshend, J.R. Global surface reflectance products from Landsat: Assessment using coincident MODIS observations. Remote Sens. Environ 2013, 134, 276–293. [Google Scholar]
- Jones, J.W.; Starbuck, M.J.; Jenkerson, C.B. Landsat Surface Reflectance Quality Assurance Extraction (Version 1.7); U.S. Geological Survey: Reston, VA, USA, 2013; Chapter C7; p. 9. [Google Scholar]
- Healey, S.P.; Cohen, W.B.; Yang, Z.; Krankina, O.N. Comparison of tasseled cap-based Landsat data structures for use in forest disturbance detection. Remote Sens. Environ 2005, 97, 301–310. [Google Scholar]
- Kennedy, R.E.; Cohen, W.B.; Schroeder, T.A. Trajectory-based change detection for automated characterization of forest disturbance dynamics. Remote Sens. Environ 2007, 110, 370–386. [Google Scholar]
- Huang, C.; Goward, S.N.; Masek, J.G.; Thomas, N.; Zhu, Z.; Vogelmann, J.E. An automated approach for reconstructing recent forest disturbance history using dense Landsat time series stacks. Remote Sens. Environ 2010, 114, 183–198. [Google Scholar]
- Kennedy, R.E.; Yang, Z.; Cohen, W.B. Detecting trends in forest disturbance and recovery using yearly Landsat time series: 1. Landtrendr—Temporal segmentation algorithms. Remote Sens. Environ 2010, 114, 2897–2910. [Google Scholar]
- Zhu, Z.; Woodcock, C.E.; Olofsson, P. Continuous monitoring of forest disturbance using all available Landsat imagery. Remote Sens. Environ 2012, 122, 75–91. [Google Scholar]
- Crist, E.P.; Cicone, R.C. A physically-based transformation of thematic mapper data—The TM tasseled cap. IEEE Trans. Geosci. Remote Sens 1984, 3, 256–263. [Google Scholar]
- Kauth, R.J.; Thomas, G.S. The Tasseled Cap—A Graphic Description of the Spectral-Temporal Development of Agricultural Crops as Seen by Landsat. Proceedings of the Symposium on Machine Processing of Remotely Sensed Data, West Lafayette, IN, USA, 29 June–1 July 1976; pp. 41–51.
- Crist, E.P. A TM tasseled cap equivalent transformation for reflectance factor data. Remote Sens. Environ 1985, 17, 301–306. [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Classification | Reference | ||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| UD | 1985 | 1986 | 1987 | 1988 | 1989 | 1990 | 1991 | 1992 | 1993 | 1994 | 1995 | 1998 | 1999 | 2000 | Sum | Error of Comm. | |
| UD | 107 | 0 | 0 | 1 | 4 | 3 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 4 | 0 | 119 | 10.08% |
| 1985 | 4 | 81 | 15 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 100 | 19.00% |
| 1986 | 8 | 2 | 89 | 0 | 1 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 101 | 11.88% |
| 1987 | 5 | 0 | 0 | 96 | 1 | 1 | 0 | 0 | 0 | 3 | 0 | 0 | 0 | 0 | 1 | 107 | 10.28% |
| 1988 | 11 | 0 | 3 | 0 | 90 | 0 | 0 | 0 | 0 | 0 | 2 | 0 | 0 | 0 | 1 | 107 | 15.89% |
| 1989 | 7 | 0 | 3 | 0 | 0 | 89 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 100 | 11.00% |
| 1990 | 12 | 0 | 0 | 0 | 2 | 13 | 73 | 0 | 0 | 0 | 1 | 0 | 0 | 3 | 1 | 105 | 30.48% |
| 1991 | 4 | 0 | 0 | 0 | 0 | 1 | 0 | 93 | 0 | 0 | 0 | 1 | 0 | 1 | 0 | 100 | 7.00% |
| 1992 | 16 | 0 | 0 | 0 | 2 | 0 | 0 | 0 | 80 | 0 | 0 | 0 | 0 | 0 | 2 | 100 | 20.00% |
| 1993 | 5 | 0 | 0 | 5 | 4 | 6 | 0 | 0 | 5 | 75 | 0 | 0 | 0 | 0 | 0 | 100 | 25.00% |
| 1994 | 6 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 2 | 0 | 94 | 0 | 0 | 1 | 1 | 104 | 9.62% |
| 1995 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 99 | 0 | 0 | 0 | 100 | 1.00% |
| 1998 | 16 | 2 | 0 | 0 | 1 | 1 | 0 | 0 | 2 | 0 | 0 | 0 | 54 | 2 | 2 | 80 | 32.50% |
| 1999 | 9 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 1 | 0 | 0 | 1 | 0 | 99 | 0 | 111 | 10.81% |
| 2000 | 27 | 0 | 1 | 0 | 0 | 0 | 2 | 1 | 0 | 0 | 0 | 0 | 0 | 1 | 76 | 108 | 29.63% |
| Sum | 238 | 85 | 111 | 102 | 106 | 114 | 75 | 94 | 91 | 78 | 97 | 101 | 54 | 111 | 85 | 1542 | |
| Error of Omis. | 55.04% | 4.71% | 19.82% | 5.88% | 15.09% | 21.93% | 2.67% | 1.06% | 12.09% | 3.85% | 3.09% | 1.98% | 0.00% | 10.81% | 10.59% | ||
| Overall Accuracy: 83.98%, Kappa: 0.83 | |||||||||||||||||
| Statistics | Russia | European Russia | Western Siberia | Eastern Siberia | Sparse Stacks | Dense Stacks |
|---|---|---|---|---|---|---|
| Number of Stacks | 55 | 16 | 7 | 32 | 43 | 12 |
| Number of Validation Points | 1542 | 745 | 181 | 616 | 758 | 784 |
| Overall Accuracy | 83.98% | 82.95% | 79.01% | 86.69% | 85.36% | 82.65% |
| Kappa | 0.83 | 0.81 | 0.76 | 0.85 | 0.84 | 0.81 |
| Year of Disturbance | European Russia | Western Siberia | Eastern Siberia | Total |
|---|---|---|---|---|
| 1985 | 27 | N/A | N/A | 27 |
| 1986 | 146 | N/A | N/A | 146 |
| 1987 | 803 | 116 | N/A | 919 |
| 1988 | 2328 | 26 | N/A | 2354 |
| 1989 | 490 | 692 | N/A | 1181 |
| 1990 | 168 | 72 | 699 | 939 |
| 1991 | 4 | 10 | 1410 | 1424 |
| 1992 | 440 | 22 | 899 | 1361 |
| 1993 | 768 | 532 | N/A | 1300 |
| 1994 | 315 | N/A | 1102 | 1417 |
| 1995 | 9 | N/A | 1633 | 1642 |
| 1998 | 2 | N/A | 236 | 238 |
| 1999 | 1037 | 1160 | 3311 | 5508 |
| 2000 | 1385 | 676 | 10,568 | 12,629 |
| Total | 7923 | 3305 | 19,859 |
© 2014 by the authors; licensee MDPI, Basel, Switzerland This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/3.0/).
Share and Cite
Chen, D.; Loboda, T.; Channan, S.; Hoffman-Hall, A. Long-Term Record of Sampled Disturbances in Northern Eurasian Boreal Forest from Pre-2000 Landsat Data. Remote Sens. 2014, 6, 6020-6038. https://doi.org/10.3390/rs6076020
Chen D, Loboda T, Channan S, Hoffman-Hall A. Long-Term Record of Sampled Disturbances in Northern Eurasian Boreal Forest from Pre-2000 Landsat Data. Remote Sensing. 2014; 6(7):6020-6038. https://doi.org/10.3390/rs6076020
Chicago/Turabian StyleChen, Dong, Tatiana Loboda, Saurabh Channan, and Amanda Hoffman-Hall. 2014. "Long-Term Record of Sampled Disturbances in Northern Eurasian Boreal Forest from Pre-2000 Landsat Data" Remote Sensing 6, no. 7: 6020-6038. https://doi.org/10.3390/rs6076020
APA StyleChen, D., Loboda, T., Channan, S., & Hoffman-Hall, A. (2014). Long-Term Record of Sampled Disturbances in Northern Eurasian Boreal Forest from Pre-2000 Landsat Data. Remote Sensing, 6(7), 6020-6038. https://doi.org/10.3390/rs6076020