1. Introduction
Land surface temperature (LST) is an important variable in many research areas, such as global climate change, retrieval of soil moisture content, and ground flux [
1,
2]. Remote sensing is an effective way of providing LSTs at the regional and global scales. Remote sensors with infrared channels, such as the Moderate-resolution imaging Spectrometer (MODIS) and the Advanced Spaceborne Thermal Emission and Reflection Radiometer (ASTER), play important roles in estimating LST. Currently, four major TIR-based LST retrieval methods have been developed, including the single-channel method, the split-window method, the multi-angle method and the multi-temporal method; the accuracy of most methods is within 1 K [
3,
4].
Most studies focus on cloud-free conditions. However, on a regional scale, the actual weather is cloudy in most regions for more than half of the year [
5]. The presence of clouds significantly modifies the surface energy budget [
6]. Many land surface temperature products from existing satellite remote sensing data only detect cloud pixels without recording the pixel’s temperature; thus, LST data are lacking in cloudy areas. However, many studies concerning the application of these data (such as drought monitoring, vegetation growth and crop yield estimation) need the entire spatial distribution of the LST over a region. Therefore, LST estimates under cloudy skies (T
cloud) are urgently needed. Because of the absorption of surface emission by clouds, T
cloud cannot be calculated directly from remotely sensed thermal-infrared information. Presently, only microwave remote sensing can be used to obtain T
cloud because it is able to penetrate clouds. Jia
et al. [
7] retrieved LST data based on passive-microwave remotely sensed data and achieved an accuracy of 3 K relative to the MODIS LST product. However, these methods of using microwave observations are limited because microwave remote sensing is very sensitive to surface roughness and surface moisture.
On the basis of the surface energy balance, Jin
et al. [
6] proposed a “neighboring-pixel” approach to estimate the LST of cloudy pixels from polar-orbiting satellite data, in which the LST of a cloudy pixel is interpolated from LST observations of surrounding clear sky (T
clear) pixels within 100–300 Km or within two days. The method is limited if the clear and cloudy pixels are not homogeneous and the atmospheric conditions are non-uniform. To overcome this weakness, Lu
et al. [
8] calculated T
cloud, which is interpolated from temporal-based neighboring-pixel T
clear observations and is compared using the spatial-based neighboring-pixel method. The result shows that the temporal “neighboring-pixel” method is better than a spatial approach, and the absolute error is within 1.5 K. However, one disadvantage of this approach is inevitable. Specifically, T
cloud is interpolated from T
clear of temporally neighboring pixels, while the difference in net solar shortwave radiation (NSSR) in the proposed method is obtained from spatially neighboring pixels.
The objective of this study is to estimate the LST under cloudy skies from multi-temporal remote sensing observations. The methodology is presented in
Section 2, and the data, including satellite and ground-based measurements, are described in
Section 3. The results and discussions of the proposed method are presented in
Section 4.
Section 5 provides an example of estimating LST under overcast conditions from Meteosat Second Generation (MSG)/SEVIRI data. Finally, the conclusion is presented in
Section 6.
2. Method
Assuming the 1D periodic heating of a uniform half-space of constant thermal properties, the temperature obeys the diffusion equation:
where
k is thermal diffusivity (m
2∙s
−1) and
T(
z,t) represents the soil temperature at a distance (
z) below the surface at time (
t). Under a specific set of initial and boundary conditions, the model gives the surface-subsurface temperature profiles as a function of time. Initial conditions are specified 24 h or more before the time to weaken the dependence of the model results on initial values. The lower boundary condition is that the temperature is constant at a depth of 50 cm and the upper boundary condition is the energy balance equation which is listed as Equation (2) [
9].
where
NSSR is the net shortwave solar radiation (W∙m
−2),
Lnet is the net longwave radiation from ground and air (W∙m
−2),
H is sensible heat transfer between ground and air (W∙m
−2),
LE is the latent heat transfer between ground and air (W∙m
−2) and
G is heat conducted in the soil or rock unit (W∙m
−2).
A solution to Equation (1) using the cosine function is
where
is the damping depth of the diurnal temperature wave,
td is the time at which the surface temperature (
z = 0) reaches its maximum and
w is the angular diurnal frequency of surface temperature in a period (which is nearly π/DD (DD is the duration of daytime)).
Combining Equation (3), the ground
G (
z = 0) heat transport in Equation (2), which is defined as positive in the downward direction, can be written as
where
K is the thermal conductivity (W∙m
−1∙K
−1),
P is the thermal inertia (W∙s
1/2∙m
−2∙k
−1) and the other parameters are the same as those in Equation (3).
Equation (2) can be also written as:
where
where
S is the solar constant, τ is the transmission,
A is the broadband albedo,
Zn is the solar zenith,
Rn is the net radiation (W∙m
−2), ε
s is the surface emissivity,
Latm↓ is the atmospheric downward radiation, λ is the latitude, δ
s is the solar declination angle,
NSSR is the net shortwave solar radiation (W∙m
−2),
w1 is the angular diurnal frequency of solar radiation in a period that is nearly π/DD (DD is the duration of daytime),
ts is the time (local time 12 h in general) at which the
NSSR is maximized (
NSSRmax).
According to Equation (5),
NSSR can be expressed as:
where: in theory,
Smin = (1 −
A)
S τsin(λ)sin(δ
s), approximately represents the minimum daytime
NSSR, and
Smax = (1 −
A)
S τcos(λ)cos(δ
s), approximately represents amplitude of the daytime
NSSR,
w1 and
ts are the same as those in Equation (5).
Just as shown in Equation (6), if A and τ are stable over a day, then a harmonic variation (cosine function) can be used to describe the diurnal NSSR evolution exactly. Note, the surface is not a Lambertian reflector, i.e., the albedo is related to the solar zenith angle, and the transmittance (τ) is not constant over a day. However, A and τ are relative stable to incoming solar radiation, and diurnal NSSR in the daytime can be only approximately described with four parameters (Smin, Smax, w1 and ts), we defined the model as diurnal solar cycle model (DSC).
According to Equation (3), the surface temperature can be written as
Many researchers think the cosine function can only be used to describe the daytime LST, and an exponential attenuation function can be employed to fit the nighttime LST [
10,
11,
12]; thus, the diurnal evolution of the LST (DTC) can be written as
where
Moreover, T and T0 are the two parameters to be defined: approximately represents the minimum temperature (Tmin), while T0 represents the amplitude (approximately Tmax − Tmin, where Tmax is the maximum daytime LST). Furthermore, trs is the starting time of the attenuation (near sunset), β is the decay coefficient during the nighttime, td and w are the same as those in Equation (3).
Assuming that
Latm↓ −
H –
LE =
aT +
b and that the surface longwave radiation function is linearized in the vicinity (
Ti), the following function can be derived by simple mathematical manipulation of Equations (4)–(6):
Assuming
w1 is the same as
w in Equation (9),
i.e.,
w1 =
w, and substituting Equation (7) into Equation (9), the daytime surface temperature (
T) can be expressed as follows:
where,
and
The method used to estimate the thermal inertia can be obtained by combining tg(
w × (
td −
ts)) with
T0 as follows:
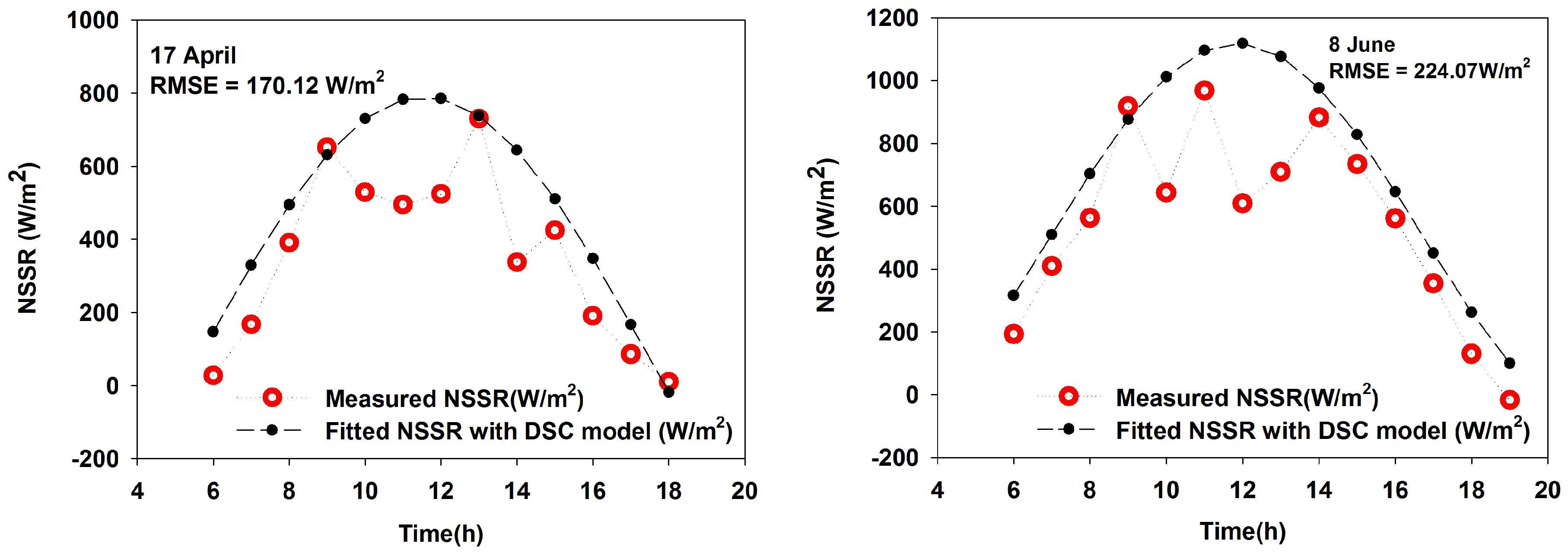
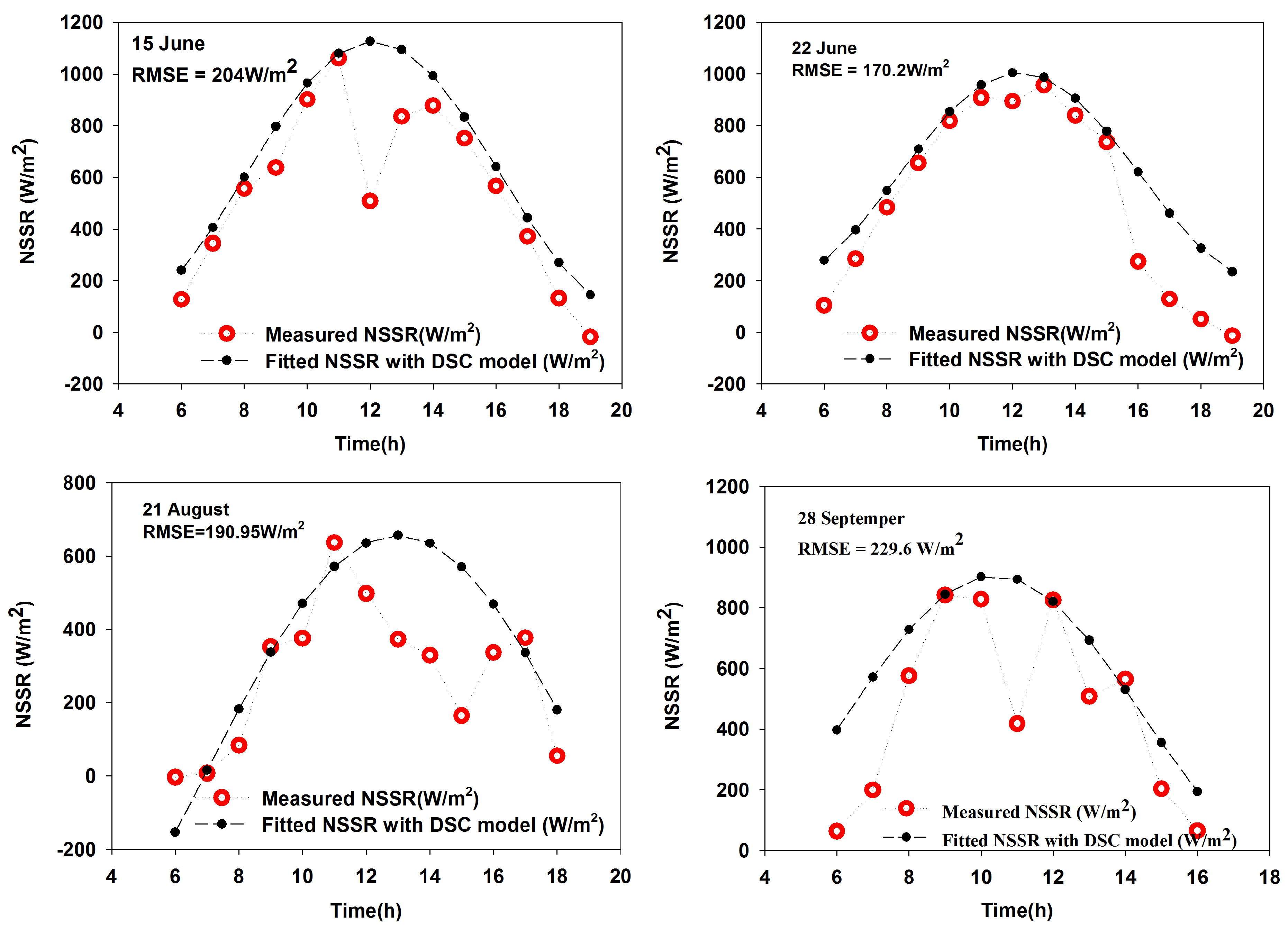
If the time series of the surface temperature and NSSR can be derived (more than six observations), three parameters (Smax, ts and w) in Equation (6) and two parameters (T0 and td) in Equation (8) can be estimated by fitting Equations (6) and (8) using least square method, then P can be obtained using w × (td − ts), T0 and Smax with Equation (12).
Thermal inertia represents the resistance to a temperature change in the upper few centimeters of the surface throughout the day, and it is independent of the local time, latitude, and season. A higher thermal inertia corresponds to a slower change in the temperature for the same incoming energy [
13]. Solar radiation is the primary type of energy that reaches the Earth’s surface; thus, the surface temperature decreases when the sky is overcast. Because of the character of thermal inertia, the change in temperature lags behind the reduced incoming solar radiation. For example, the time at which the temperature is maximized (
td) often lags behind the time at which the
NSSR is maximized (
ts). Meanwhile, the amplitude of the variation in surface temperature is also affected by thermal inertia. When the sky is cloudy, the reduced incoming solar radiation causes a drop in the LST; but, the time in temperature change will be postponed, perhaps lasts
td −
ts, and the amplitude of the temperature change increases incrementally (from 0 to 1). Assuming that the LST variations are caused by variations in insolation (ΔS), which is related to cloudiness, at the same time, the amplitudes of the LST variations are related to thermal inertia (
P). Considering ΔS is less than 500 W∙m
−2, and
P changes from 400 to 4000 W∙s
1/2∙m
−2∙k
−1 in most situations, Lu
et al. [
8] also pointed out the ratio of solar radiation change and temperature change is between 30 and 300. So, the amplitudes of the LSTs variations are enlarged by a factor of 10. The method to calculate the daytime LST under cloudy skies combining the diurnal solar radiation and surface temperature is proposed as follows:
where T
cloud is the LST under cloudy skies, T
clear is the LST under cloud-free skies (estimated using Equation (8)), and ΔS is the difference in the NSSR values between clear or cloudy skies. Considering the lag between LST variations and insolation variations, ΔS cannot attain a maximum once a cloud appears. Instead, the value reaches a maximum at some time after a cloud appears (
td −
ts). Moreover, the degree of the influence increases incrementally (from 0–1). Therefore, ΔS is given as follows:
where
Sactual is the actual NSSR at
t time,
Sfit is fitted using Equation (6) which means
NSSR under cloud-free skies (
NSSRclear) at
t time, and
t is time.
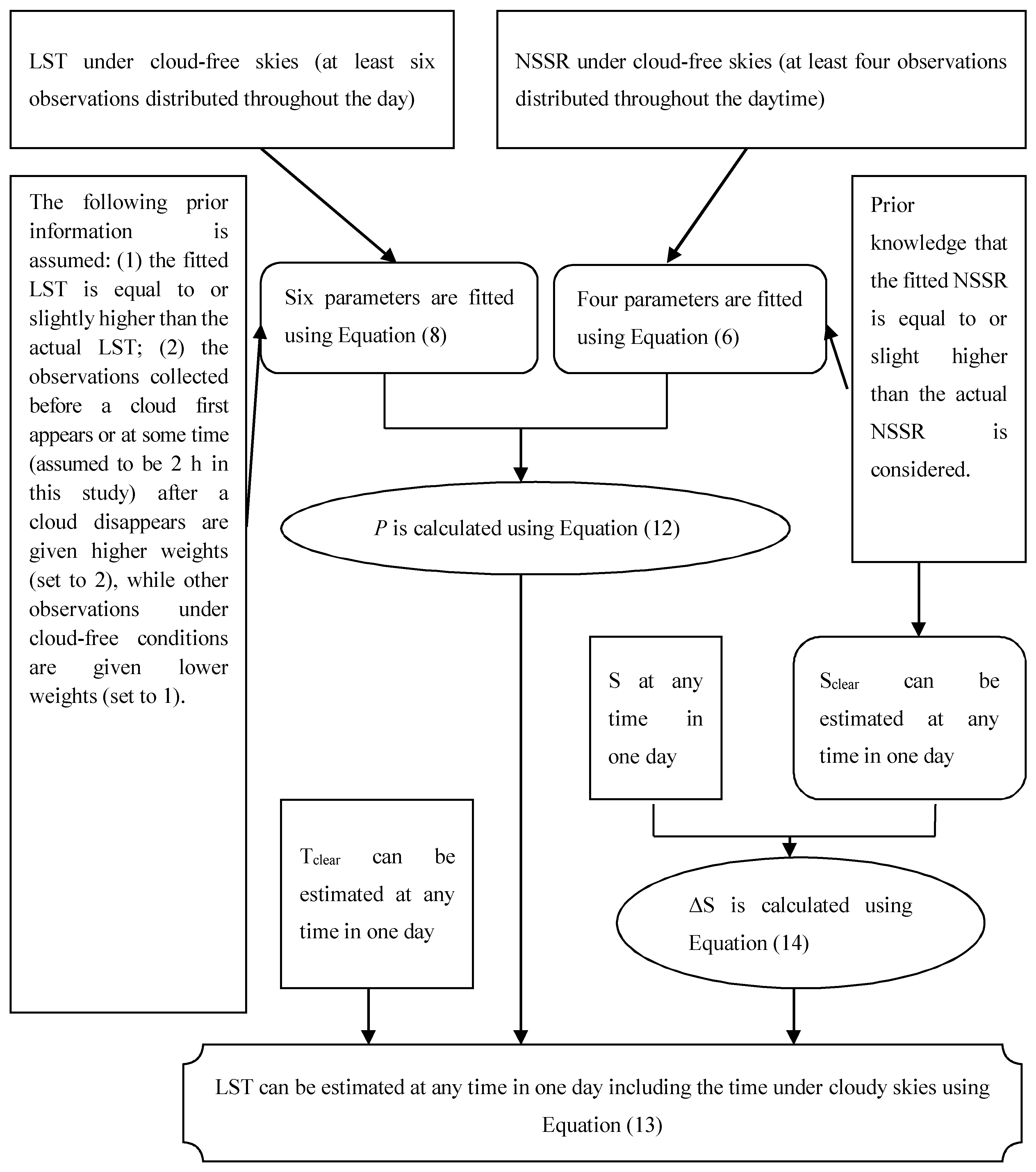
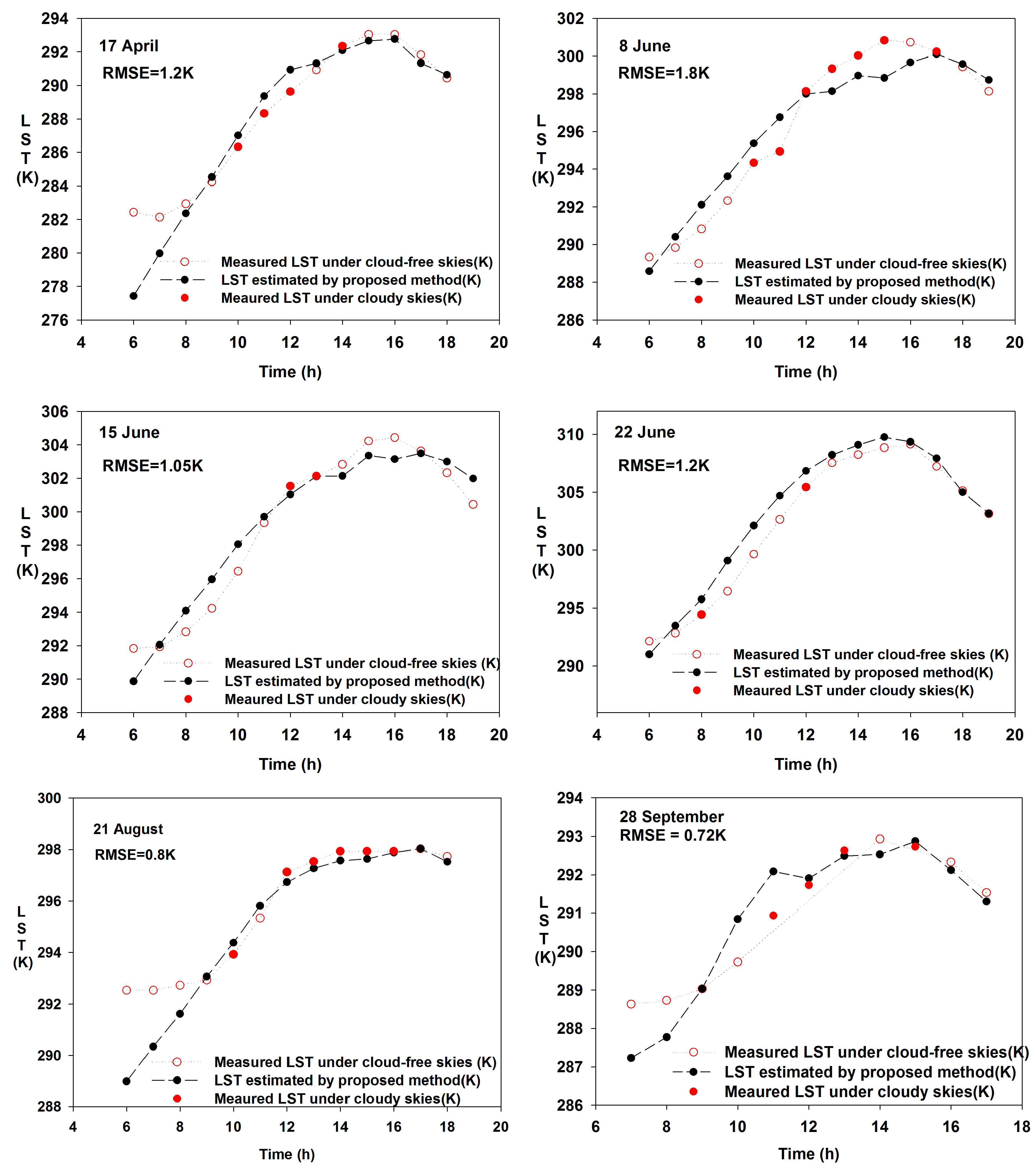
To sum up, if the time series of the surface temperature and NSSR can be derived (more than six observations), three parameters (Smax, ts and w) in Equation (6) and two parameters (T0 and td) in Equation (8) can be estimated by fitting Equations (6) and (8) using least square method, then P can be obtained using w × (td − ts), T0 and Smax with Equation (12). Meanwhile, Tclear at any time during the daytime can be estimated using Equation (8) with six parameters (T, T0, w, td, ts, and β which are inversed using more than six observations with least square method). Similarly, NSSRclear can be also obtained using Equation (6), and ΔS can be calculated after NSSRclear minus observed NSSR, in the end, substituting these variables (Tclear, ΔS and P) to Equation (13), Tcloud can be calculated.
Notably, the method of estimating thermal inertia is based on homogeneous bare soil, which is not realistic. So, the
P in Equations (12) and (13) is defined as the apparent thermal inertia. Furthermore, in the process of inducing thermal inertia, the angular diurnal frequency (
w) is the same for Equations (6) and (8). Considering the varying atmospheric conditions and underlying surfaces,
w exhibits a slight difference. Therefore, the mean
w (for
NSSR and LST) is used to obtain the LST under cloudy skies.
Figure 1 presents a flow chart for estimating LST under cloudy skies.
6. Conclusions
With more and more geostationary meteorological satellites in operation, the estimation of LST for cloudy pixels is required. In this paper, we proposed a new method to estimate LST under cloudy skies by combining diurnal solar radiation with surface temperatures.
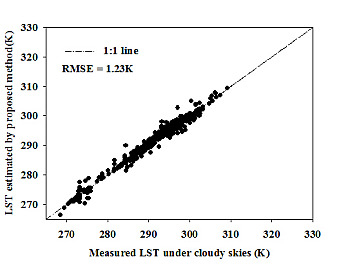
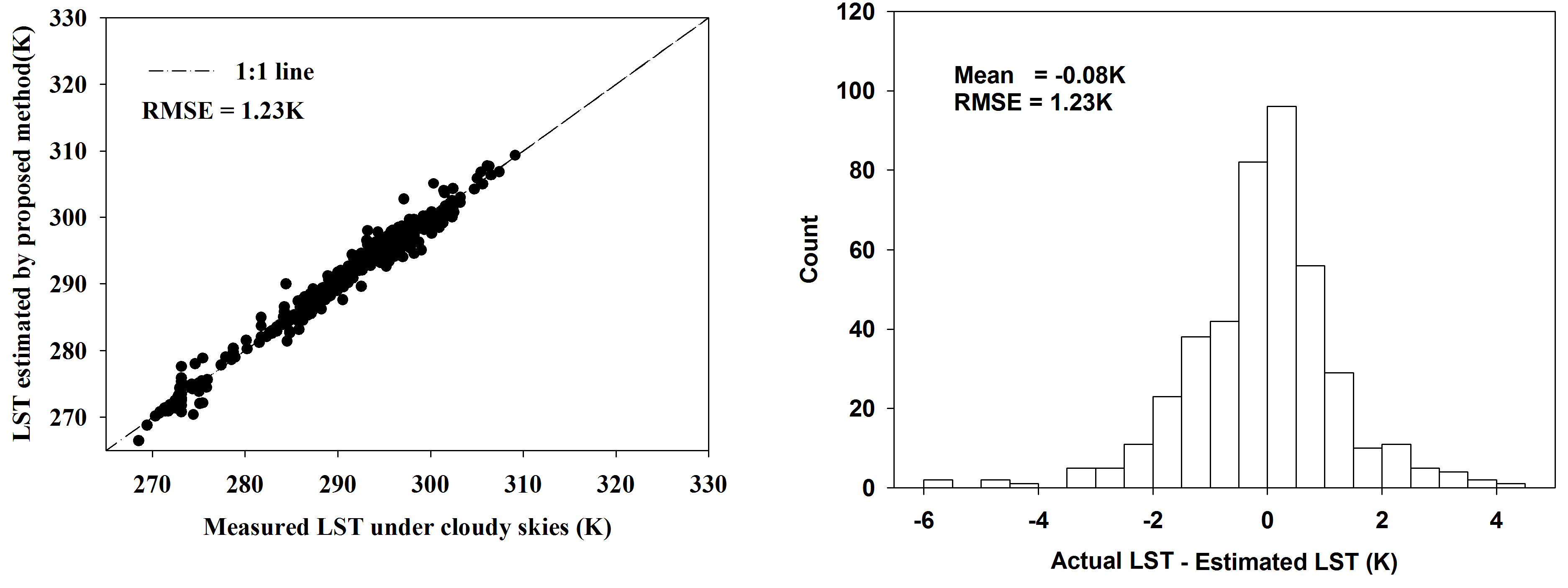
The RMSE between the in situ LST from the Chang Wu experimental station located in Shaanxi Province (107°40′E and 35°12′N) and the predicted value is 1.23 K; thus, the proposed algorithm can be used to calculate LST under cloudy skies.
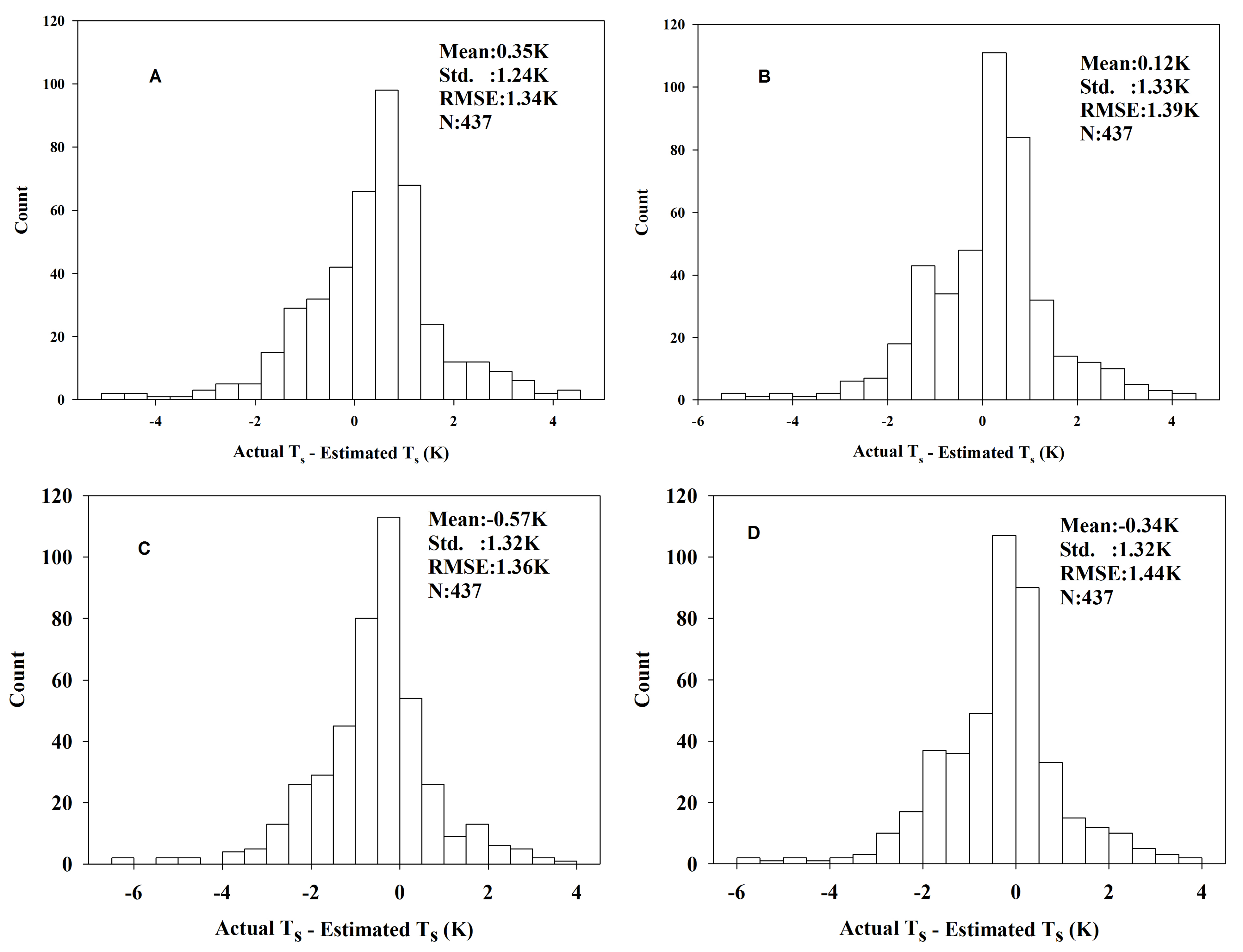
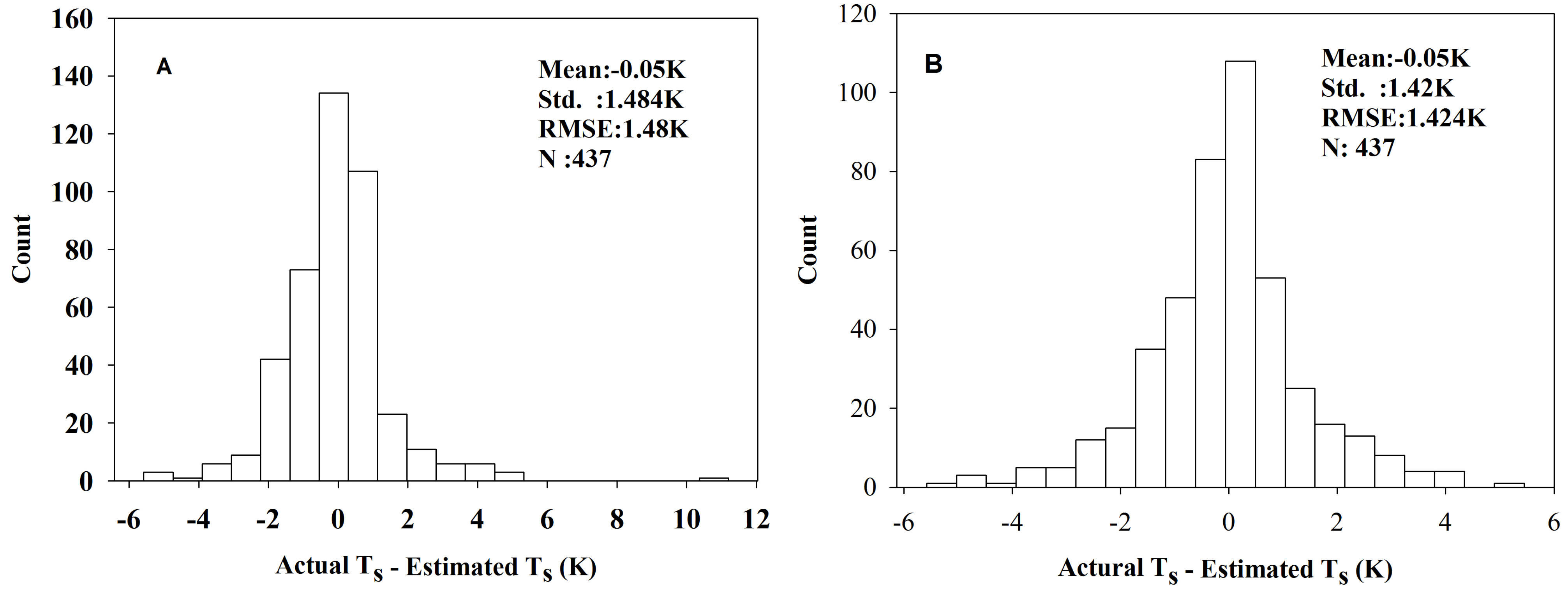
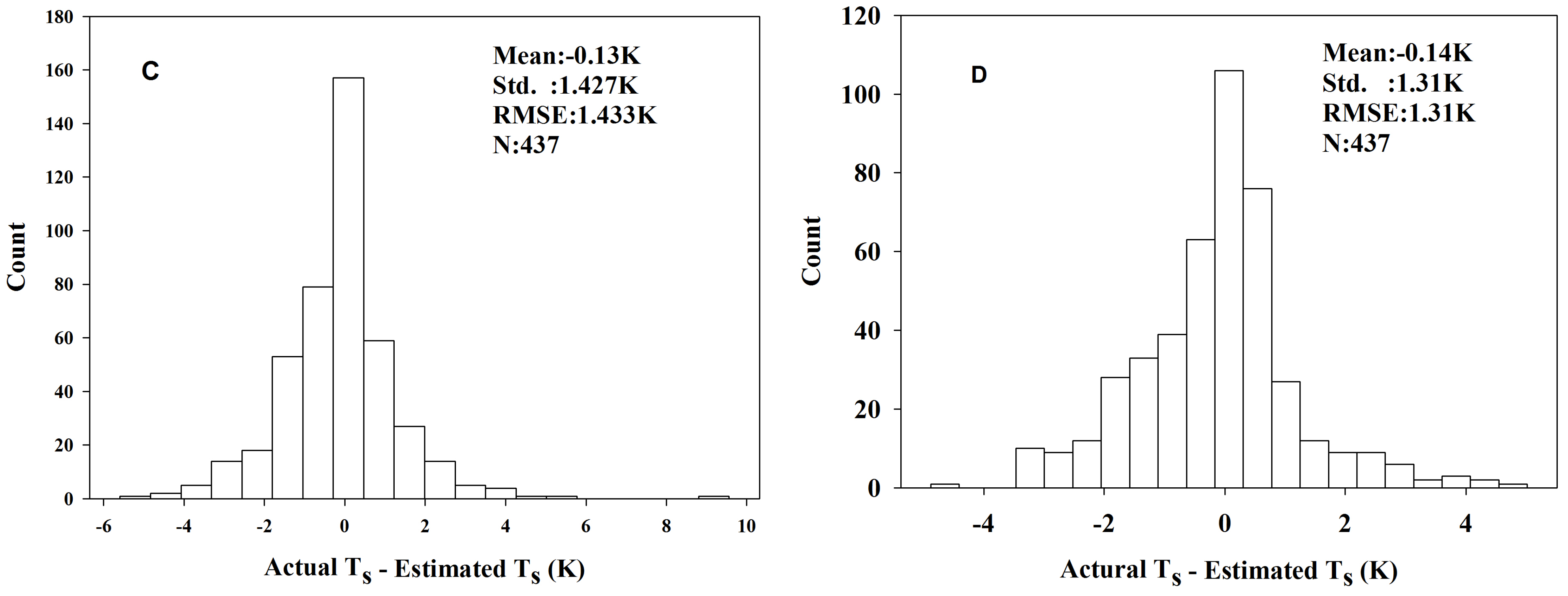
The proposed method requires the use of LST under cloud-free skies (Tclear) and diurnal NSSR. Considering the errors in the estimated LST under cloudy conditions (Tcloud) when using NSSR and Tclear, a sensitivity analysis regarding the uncertainty of Tclear and NSSR was also performed. The results show that the accuracy of the LST retrieval can be off by 0.11 K, 0.16 K, 0.17 K and 0.21 K, respectively, when adding a −0.25 K, −0.5 K, 0.25 K and 0.5 K bias to the actual Tclear. The effect of the uncertainty in the NSSR on the LST retrieval could be approximately 0.254, 0.194, 0.19 and 0.08 K, respectively, when adding −5, −10, 5 and 10 percent NSSR errors to the real NSSR.
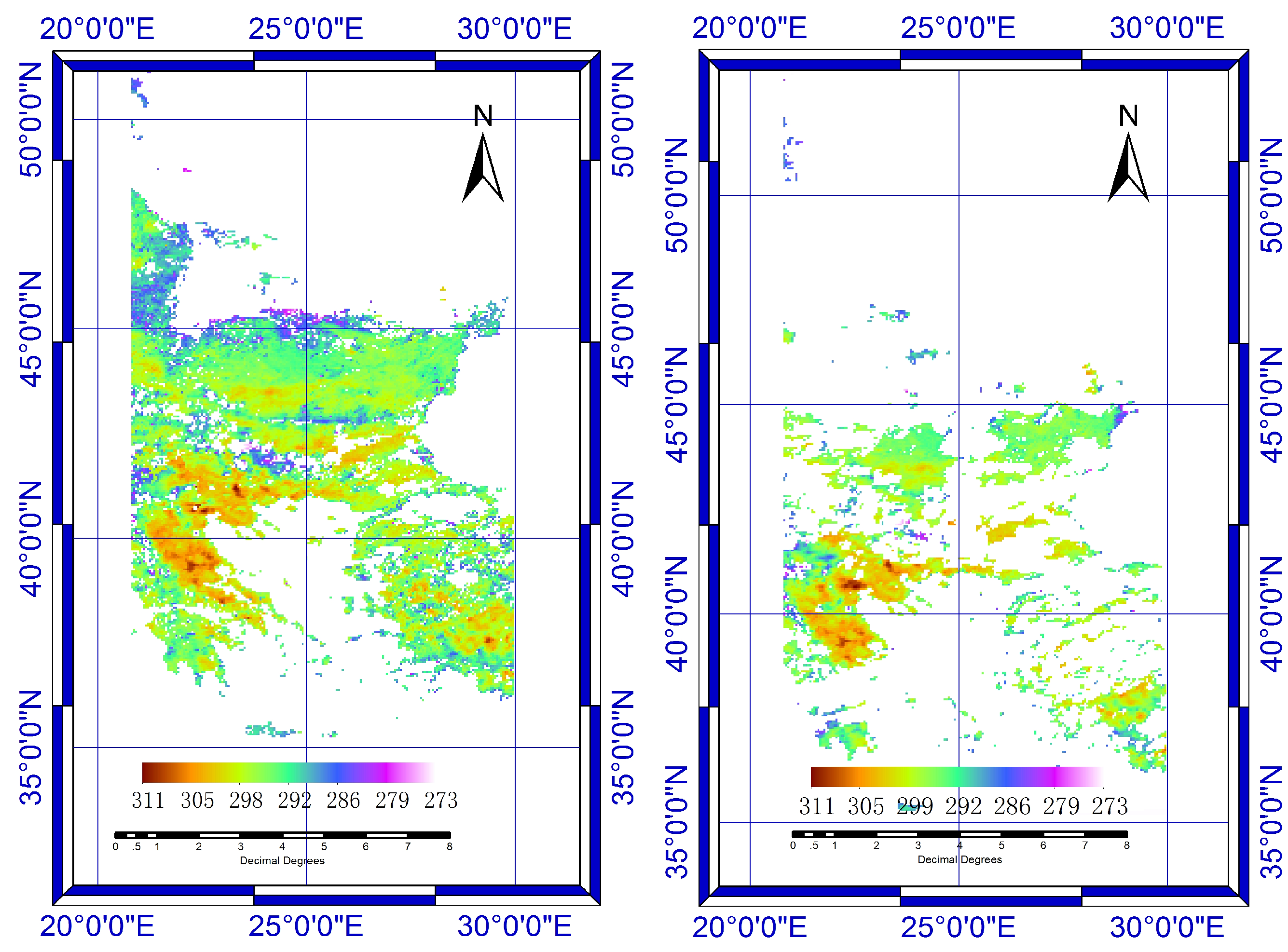
Finally, Tcloud was calculated using Tclear and Down-welling Surface Short-wave Radiation Flux (DSSR) and albedo products of MSG2-SEVIRI from the Land Surface Analysis Satellite Applications Facility (LSASAF) using the new method. The new algorithm can be applied to LST data retrieved from a geo-stationary satellite during cloudy conditions, and it provides the ability to reconstruct diurnal LST cycles from geo-stationary satellite observations. These cycles are particularly useful in regions where ground-based meteorological observations are scarce.
Notably, the proposed method assumes that the variation in the LST is caused by variations in insolation (which is related to cloudiness) during the daytime. Therefore, the approach can only be used during the daytime. Furthermore, at least six Tclear values in one day are needed to fit the DTC model; therefore, the algorithm cannot be used to estimate the LST when less than six Tclear observations are available. These limitations will be addressed in future research.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}










