
A Dynamic Remote Sensing Data-Driven Approach for Oil Spill Simulation in the Sea



Abstract
:
1. Introduction
2. Oil Spill Remote Sensing Detection Techniques
2.1. Oil Spill Remote Sensing
2.2. Oil Spill Detection
3. Oil Spill Simulation Techniques
3.1. Oil Spill Simulation Basic Theory
3.2. Model Setup and Oil Spill Simulation
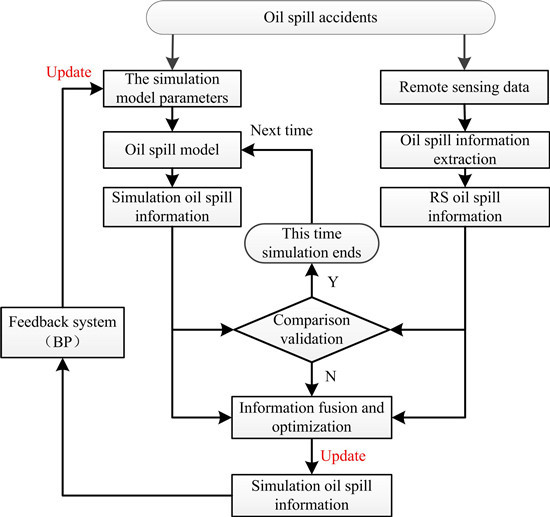
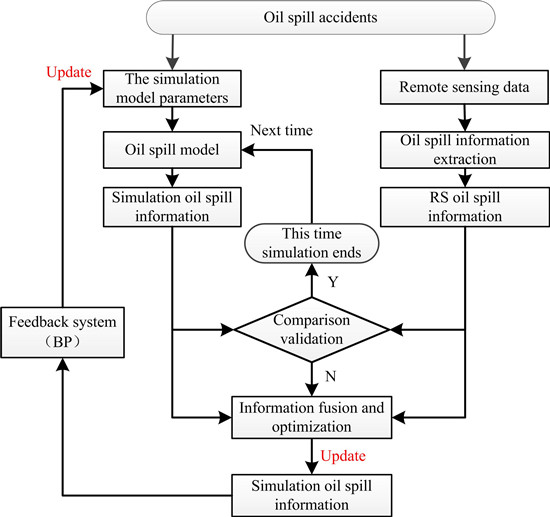
4. DDDAS-Based Oil Spill Simulation
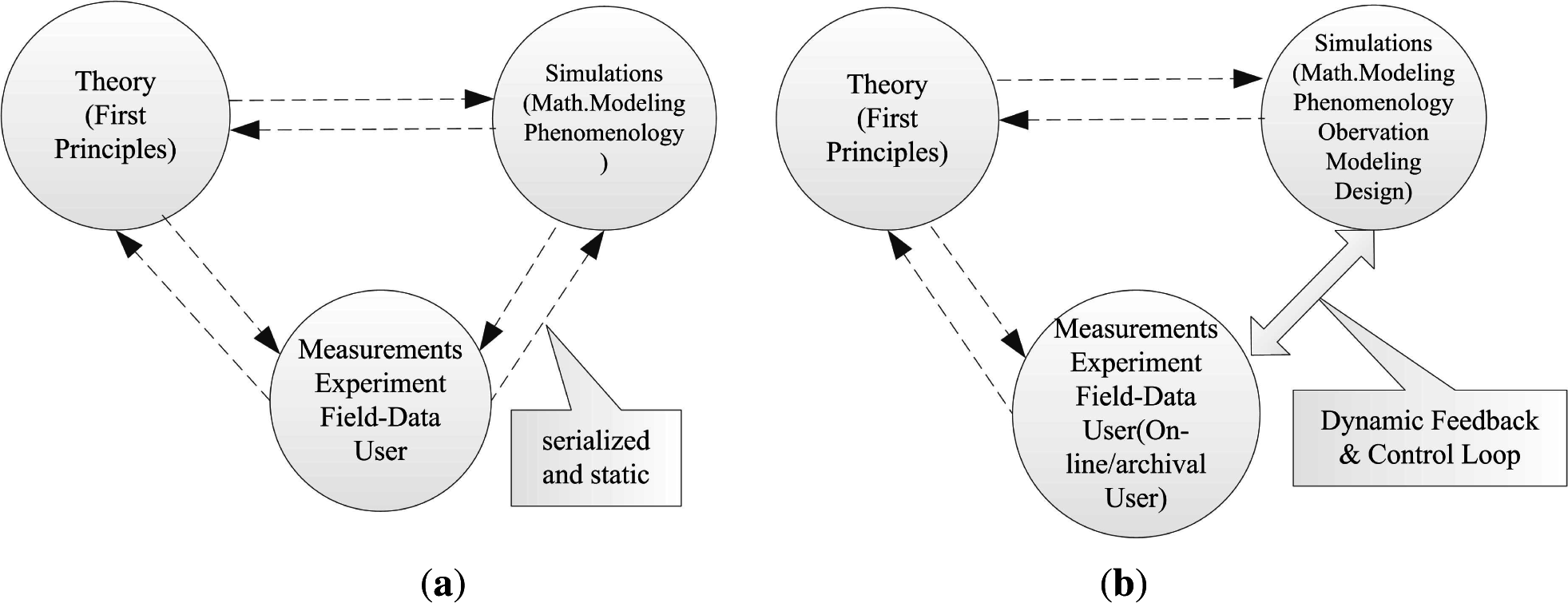
4.1. DDDAS Basic Theory
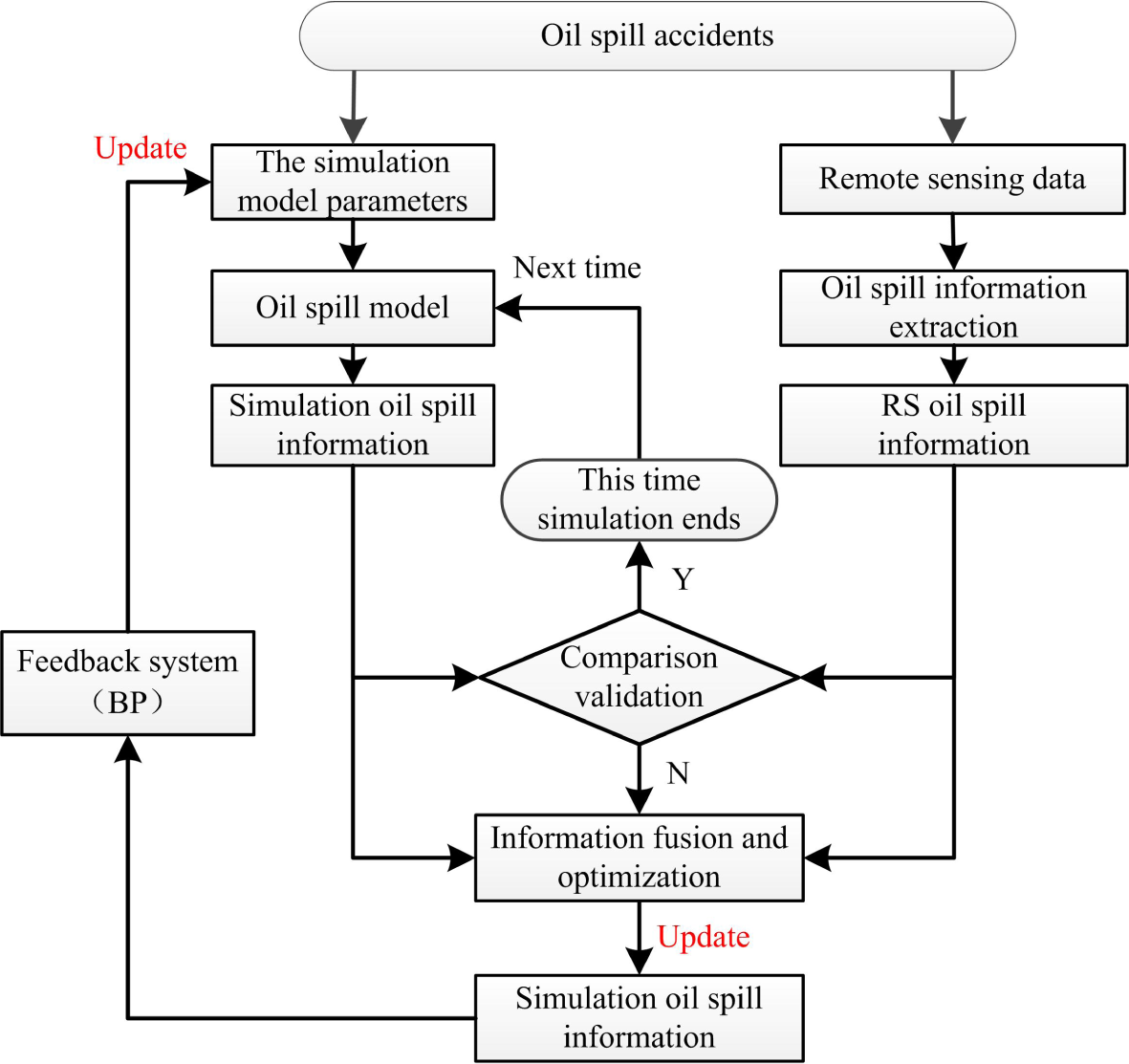
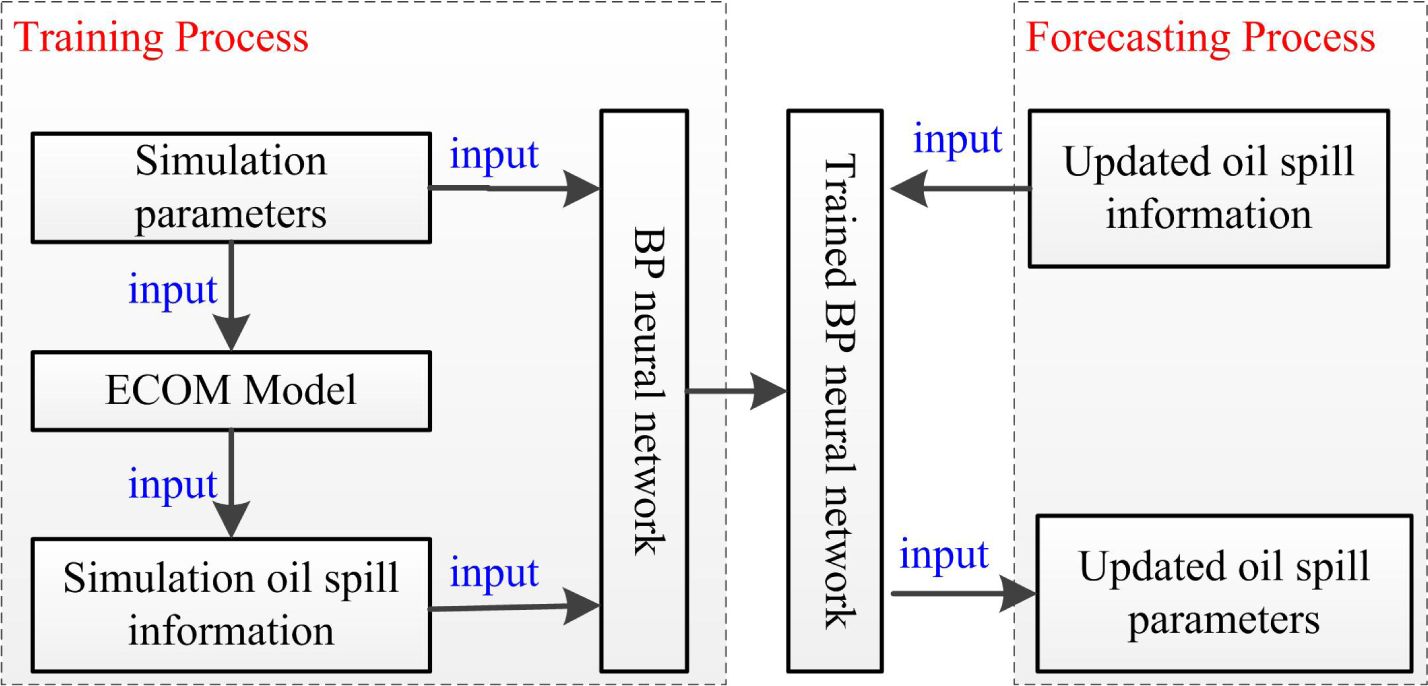
4.2. DDDAS-Based Oil Spill Simulation
5. Validations
5.1. Penglai Results Validation
5.2. Other Oil Spill Validation Cases
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Li, Y.; Wang, L.; Chen, L.; Ma, Y.; Zhu, X.; Chu, B. Application of DDDAS in Marine Oil Spill Management: A New Framework Combining Multiple Source Remote Sensing Monitoring and Simulation as a Symbiotic Feedback Control System. Proceedings of the 2013 33rd IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Melbourne, Australia, 21–26 July 2013; pp. 4526–4529.
- Liu, Y.; Weisberg, R.H.; Hu, C.; Zheng, L. Tracking the Deepwater Horizon oil spill: A modeling perspective. Eos Trans. Am. Geophys. Union 2011, 92, 45–46. [Google Scholar]
- Lv, Y.; Zhang, W.; Gao, Y.; Ning, S.; Yang, B. Preliminary study on responses of marine nematode community to crude oil contamination in intertidal zone of Bathing Beach, Dalian. Mar. Pollut. Bull 2011, 62, 2700–2706. [Google Scholar]
- Xu, Q.; Li, X.; Wei, Y.; Tang, Z.; Cheng, Y.; Pichel, W.G. Satellite observations and modeling of oil spill trajectories in the Bohai Sea. Mar. Pollut. Bull 2013, 71, 107–116. [Google Scholar]
- Leifer, I.; Lehr, W.J.; Simecek-Beatty, D.; Bradley, E.; Clark, R.; Dennison, P.; Hu, Y.; Matheson, S.; Jones, C.E.; Holt, B.; et al. State of the art satellite and airborne marine oil spill remote sensing: Application to the BP Deepwater Horizon oil spill. Remote Sens. Environ 2012, 124, 185–209. [Google Scholar]
- Fingas, M.; Brown, C. Review of oil spill remote sensing. Mar. Pollut. Bull 2014, 83, 9–23. [Google Scholar]
- Plaza, J.; Pérez, R.; Plaza, A.; Martínez, P.; Valencia, D. Mapping oil spills on sea water using spectral mixture analysis of hyperspectral image data. Proc. SPIE 2005, 5995. [Google Scholar] [CrossRef]
- Ivanov, A.Y.; Zatyagalova, V.V. A GIS approach to mapping oil spills in a marine environment. Int. J. Remote Sens 2008, 29, 6297–6313. [Google Scholar]
- Jha, M.N.; Levy, J.; Gao, Y. Advances in remote sensing for oil spill disaster management: state-of-the-art sensors technology for oil spill surveillance. Sensors 2008, 8, 236–255. [Google Scholar]
- Pisano, A.; Bignami, F.; Santoleri, R. Oil Spill Detection in Glint-Contaminated Near-Infrared MODIS Imagery. Remote Sens 2015, 7, 1112–1134. [Google Scholar]
- Ramsey, E., III; Rangoonwala, A.; Suzuoki, Y.; Jones, C.E. Oil detection in a coastal marsh with polarimetric synthetic aperture radar (SAR). Remote Sens 2011, 3, 2630–2662. [Google Scholar]
- Ventikos, N.P.; Vergetis, E.; Psaraftis, H.N.; Triantafyllou, G. A high-level synthesis of oil spill response equipment and countermeasures. J. Hazard. Mater 2004, 107, 51–58. [Google Scholar]
- Azevedo, A.; Oliveira, A.; Fortunato, A.; Bertin, X. Application of an Eulerian-Lagrangian oil spill modeling system to the Prestige accident: trajectory analysis. J. Coast. Res 2009, 1, 777–781. [Google Scholar]
- Liu, Y.; Weisberg, R.H.; Hu, C.; Zheng, L. Trajectory forecast as a rapid response to the Deepwater Horizon oil spill. In Monitoring and Modeling the Deepwater Horizon Oil Spill: A Record-Breaking Enterprise; Elsevier: Amsterdam, The Netherlands, 2011; pp. 153–165. [Google Scholar]
- Liu, Y.; MacFadyen, A.; Ji, Z.G.; Weisberg, R.H. (Eds.) Monitoring and Modeling the Deepwater Horizon Oil Spill: A Record Breaking Enterprise. In Geophysical Monograph Series; American Geophysical Union: Washington, DC, USA, 2011; Volume 195, pp. 1–271.
- Zodiatis, G.; Lardner, R.; Solovyov, D.; Panayidou, X.; de Dominicis, M. Predictions for oil slicks detected from satellite images using MyOcean forecasting data. Ocean Sci 2012, 8, 1105–1115. [Google Scholar] [Green Version]
- De Dominicis, M.; Pinardi, N.; Zodiatis, G.; Archetti, R. MEDSLIK-II, a Lagrangian marine surface oil spill model for short-term forecasting—Part 2: Numerical simulations and validations. Geosci. Model Dev 2013, 6, 1871–1888. [Google Scholar]
- Elhakeem, A.; Elshorbagy, W.; Chebbi, R. Oil spill simulation and validation in the Arabian (Persian) Gulf with special reference to the UAE coast. Water Air Soil Pollut 2007, 184, 243–254. [Google Scholar]
- Darema, F. Dynamic data driven applications systems: A new paradigm for application simulations and measurements. Proceeding the 4th International Conference on Computational Science-ICCS 2004, Kraków, Poland, 6–9 June 2004; pp. 662–669.
- Hu, C.; Müller-Karger, F.E.; Taylor, C.J.; Myhre, D.; Murch, B.; Odriozola, A.L.; Godoy, G. MODIS detects oil spills in Lake Maracaibo, Venezuela. Eos Trans. Am. Geophys. Union 2003, 84, 313–319. [Google Scholar]
- Migliaccio, M.; Nunziata, F.; Brown, C.E.; Holt, B.; Li, X.; Pichel, W.; Shimada, M. Polarimetric synthetic aperture radar utilized to track oil spills. Eos Trans. Am. Geophys. Union 2012, 93, 161–162. [Google Scholar]
- Zhang, Y.; Li, Y.; Lin, H. Oil-Spill pollution remote sensing by Synthetic Aperture Radar. In Advanced Geoscience Remote Sensing; InTech: Rijeka, Croatia, 2014; pp. 27–50. [Google Scholar]
- Amoon, M.; Bozorgi, A.; Rezai-rad, G.A. New method for ship detection in synthetic aperture radar imagery based on the human visual attention system. J. Appl. Remote Sens 2013, 7. [Google Scholar] [CrossRef]
- Brekke, C.; Solberg, A.H. Classifiers and confidence estimation for oil spill detection in ENVISAT ASAR images. IEEE Geosci. Remote Sens. Lett 2008, 5, 65–69. [Google Scholar]
- Marghany, M.; Cracknell, A.P.; Hashim, M. Comparison between radarsat-1 SAR different data modes for oil spill detection by a fractal box counting algorithm. Int. J. Digit. Earth 2009, 2, 237–256. [Google Scholar]
- Li, X.; Li, C.; Yang, Z.; Pichel, W. SAR imaging of ocean surface oil seep trajectories induced by near inertial oscillation. Remote Sens. Environ 2013, 130, 182–187. [Google Scholar]
- Brekke, C.; Solberg, A.H. Oil spill detection by satellite remote sensing. Remote Sens. Environ 2005, 95, 1–13. [Google Scholar]
- Shirvany, R.; Chabert, M.; Tourneret, J.Y. Ship and oil-spill detection using the degree of polarization in linear and hybrid/compact dual-pol SAR. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens 2012, 5, 885–892. [Google Scholar]
- Lu, Y.; Tian, Q.; Wang, X.; Zheng, G.; Li, X. Determining oil slick thickness using hyperspectral remote sensing in the Bohai Sea of China. Int. J. Digit. Earth 2013, 6, 76–93. [Google Scholar]
- Liu, X.; Guo, J.; Guo, M.; Hu, X.; Tang, C.; Wang, C.; Xing, Q. Modelling of oil spill trajectory for 2011 Penglai 19-3 coastal drilling field, China. Appl. Math. Model 2014. [Google Scholar] [CrossRef]
- Liu, P.; Huang, F.; Li, G.; Liu, Z. Remote-Sensing image denoising using partial differential equations and auxiliary images as priors. IEEE. Geosci. Remote Sens. Lett 2012, 3, 358–362. [Google Scholar]
- Liu, P.; Eom, K.B. Restoration of multispectral images by total variation with auxiliary image. Opt. Lasers Eng 2013, 7, 873–882. [Google Scholar]
- The China State Oceanic Administration, 2011 Bohai Bay Oil Spill Accident Investigation Report by the Joint Investigation Team; The China State Oceanic Administration: Beijing, China, 2011; in Chinese.
- Ganta, R.R.; Zaheeruddin, S.; Baddiri, N.; Rao, R. Segmentation of oil spill images with illumination-reflectance based adaptive level set model. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens 2012, 5, 1394–1402. [Google Scholar]
- Moctezuma, M.; Parmiggiani, F. Adaptive stochastic minimization for measuring marine oil spill extent in synthetic aperture radar images. J. Appl. Remote Sens 2014, 8, 083553. [Google Scholar]
- Chaudhuri, D.; Samal, A.; Agrawal, A.; Mishra, A.; Gohri, V.; Agarwal, R.; et al. A statistical approach for automatic detection of ocean disturbance features from SAR images. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens 2012, 5, 1231–1242. [Google Scholar]
- Blumberg, A.F.; Mellor, G.L. A description of a three-dimensional coastal ocean circulation model. In Three-Dimensional Coastal Ocean Models; American Geophysical Union: Washington, DC, USA, 1987; pp. 1–16. [Google Scholar]
- Guo, J.; Liu, X.; Xie, Q. Characteristics of the Bohai Sea oil spill and its impact on the Bohai Sea ecosystem. Chin. Sci. Bull 2013, 58, 2276–2281. [Google Scholar]
- Tkalich, P.; Chan, E.S. Vertical mixing of oil droplets by breaking waves. Mar. Pollut. Bull 2002, 44, 1219–1229. [Google Scholar]
- Mu, L.; Wu, S.; Song, J.; Li, H.; Liu, S.; Li, Y.; Gao, J. Numerical model research on Emergency Warning & Predicting system of ocean oil spill: I. Research on predicting of ocean dynamical factors. Mar. Sci. Bull 2011, 5, 502–508, in Chinese. [Google Scholar]
- Denham, M.; Cortés, A.; Margalef, T.; Luque, E. Applying a dynamic data driven genetic algorithm to improve forest fire spread prediction. Proseedings of the Computational Science—ICCS 2008, Kraków, Poland, June 23–25 2008; pp. 36–45.
- Madey, G.R.; Barabási, A.; Chawla, N.V.; Gonzalez, M.; Hachen, D.; Lantz, B.; Pawling, A.; Schoenharl, T.; Szabó, G.; Wang, P.; et al. Enhanced situational awareness: Application of DDDAS concepts to emergency and disaster management. Proseedings of the Computational Science—ICCS 2007, Beijing, China, 27–30 May 2007.
- Darema, F. Dynamic data driven applications systems: New capabilities for application simulations and measurements. Proseedings of the Computational Science—ICCS 2005, Atlanta, GA, USA, 22–25 May 2005; pp. 610–615.
- Wang, L.; Chen, D.; Liu, W.; Ma, Y.; Wu, Y.; Deng, Z. DDDAS-Based Parallel Simulation of Threat Management for Urban Water Distribution Systems. Comput. Sci. Eng 2014, 16, 8–17. [Google Scholar]
- Garcia-Pineda, O.; MacDonald, I.R.; Li, X.; Jackson, C.R.; Pichel, W.G. Oil spill mapping and measurement in the Gulf of Mexico with Textural Classifier Neural Network Algorithm (TCNNA). IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens 2013, 6, 2517–2525. [Google Scholar]
- Topouzelis, K.; Karathanassi, V.; Pavlakis, P.; Rokos, D. Dark formation detection using neural networks. Int. J. Remote Sens 2008, 29, 4705–4720. [Google Scholar]
- Liu, Y.; Weisberg, R.H. Evaluation of trajectory modeling in different dynamic regions using normalized cumulative Lagrangian separation. J. Geophys. Res.: Oceans 2011, 116, C09013. [Google Scholar]
- Liu, Y.; Weisberg, R.H.; Vignudelli, S.; Mitchum, G.T. Evaluation of altimetry-derived surface current products using Lagrangian drifter trajectories in the eastern Gulf of Mexico. J. Geophys. Res.: Oceans 2014, 119, 2827–2842. [Google Scholar]
- Röhrs, J.; Christensen, K.H.; Hole, L.R.; Broström, G.; Drivdal, M.; Sundby, S. Observation-based evaluation of surface wave effects on currents and trajectory forecasts. Ocean Dyn 2012, 62, 1519–1533. [Google Scholar]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Time (h) | Wind Speed (m/s) | Wind Direction (°) |
|---|---|---|
| 54 | 5 | 112.5 |
| 57 | 1 | 247.5 |
| 60 | 1 | 247.5 |
| 63 | 3 | 315 |
| 66 | 2 | 112.5 |
| 69 | 1 | 90.0 |
| 72 | 3 | 90.0 |
| 75 | 4 | 112.5 |
| 78 | 7 | 180.0 |
| 81 | 4 | 157.5 |
| 84 | 5 | 180.0 |
| 87 | 4 | 202.5 |
| 90 | 4 | 157.5 |
| 93 | 5 | 157.5 |
| Initial Parameters | Initial Values |
|---|---|
| Oil spilling point X | 93 |
| Oil spilling point Y | 52 |
| Step size | 30 |
| Oil particles number | 100 |
| Start step | 961 |
| End step | 7860 |
| Time (h) | Updated Wind Speed (m/s) | Updated Wind Direction (°) |
|---|---|---|
| 54 | 4 | 220.0 |
| 57 | 3 | 347.5 |
| 60 | 5 | 312.5 |
| 63 | 4 | 210.0 |
| 66 | 6 | 120.0 |
| 69 | 3 | 90.0 |
| 72 | 5 | 140.0 |
| 75 | 7 | 242.5 |
| 78 | 9 | 337.5 |
| 81 | 6 | 210.5 |
| 84 | 8 | 270.0 |
| 87 | 6 | 270.5 |
| 90 | 7 | 320.5 |
| 93 | 8 | 315.0 |
| Updated Parameters | Updated Values |
|---|---|
| Oil spilling point X | 91 |
| Oil spilling point Y | 54 |
| Step size | 30 |
| Oil particles Number | 100 |
| Start step | 961 |
| End step | 4320 |
© 2015 by the authors; licensee MDPI, Basel, Switzerland This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yan, J.; Wang, L.; Chen, L.; Zhao, L.; Huang, B. A Dynamic Remote Sensing Data-Driven Approach for Oil Spill Simulation in the Sea. Remote Sens. 2015, 7, 7105-7125. https://doi.org/10.3390/rs70607105
Yan J, Wang L, Chen L, Zhao L, Huang B. A Dynamic Remote Sensing Data-Driven Approach for Oil Spill Simulation in the Sea. Remote Sensing. 2015; 7(6):7105-7125. https://doi.org/10.3390/rs70607105
Chicago/Turabian StyleYan, Jining, Lizhe Wang, Lajiao Chen, Lingjun Zhao, and Bomin Huang. 2015. "A Dynamic Remote Sensing Data-Driven Approach for Oil Spill Simulation in the Sea" Remote Sensing 7, no. 6: 7105-7125. https://doi.org/10.3390/rs70607105
APA StyleYan, J., Wang, L., Chen, L., Zhao, L., & Huang, B. (2015). A Dynamic Remote Sensing Data-Driven Approach for Oil Spill Simulation in the Sea. Remote Sensing, 7(6), 7105-7125. https://doi.org/10.3390/rs70607105