
Aboveground-Biomass Estimation of a Complex Tropical Forest in India Using Lidar



Abstract
:
1. Introduction

2. Materials
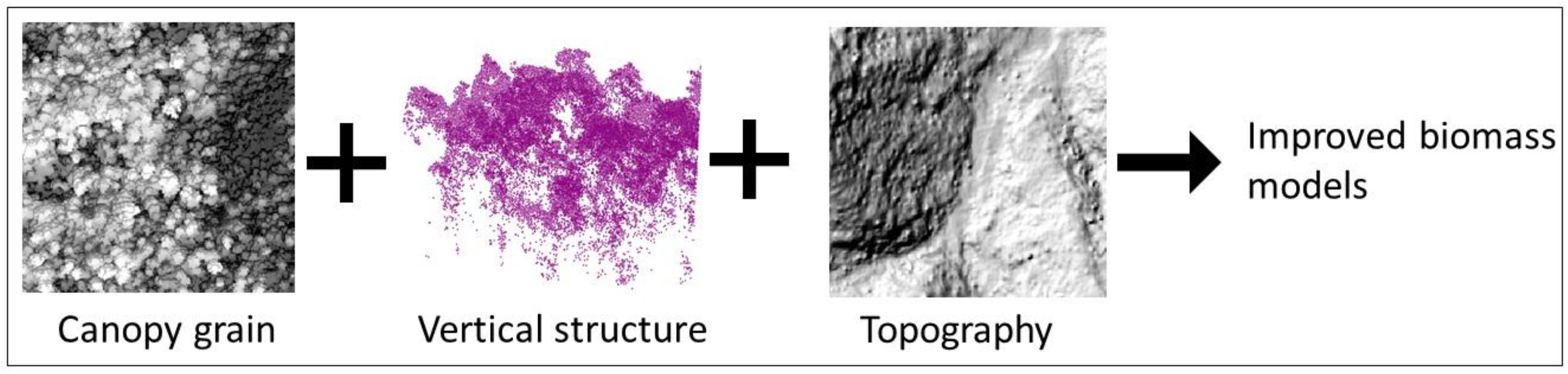
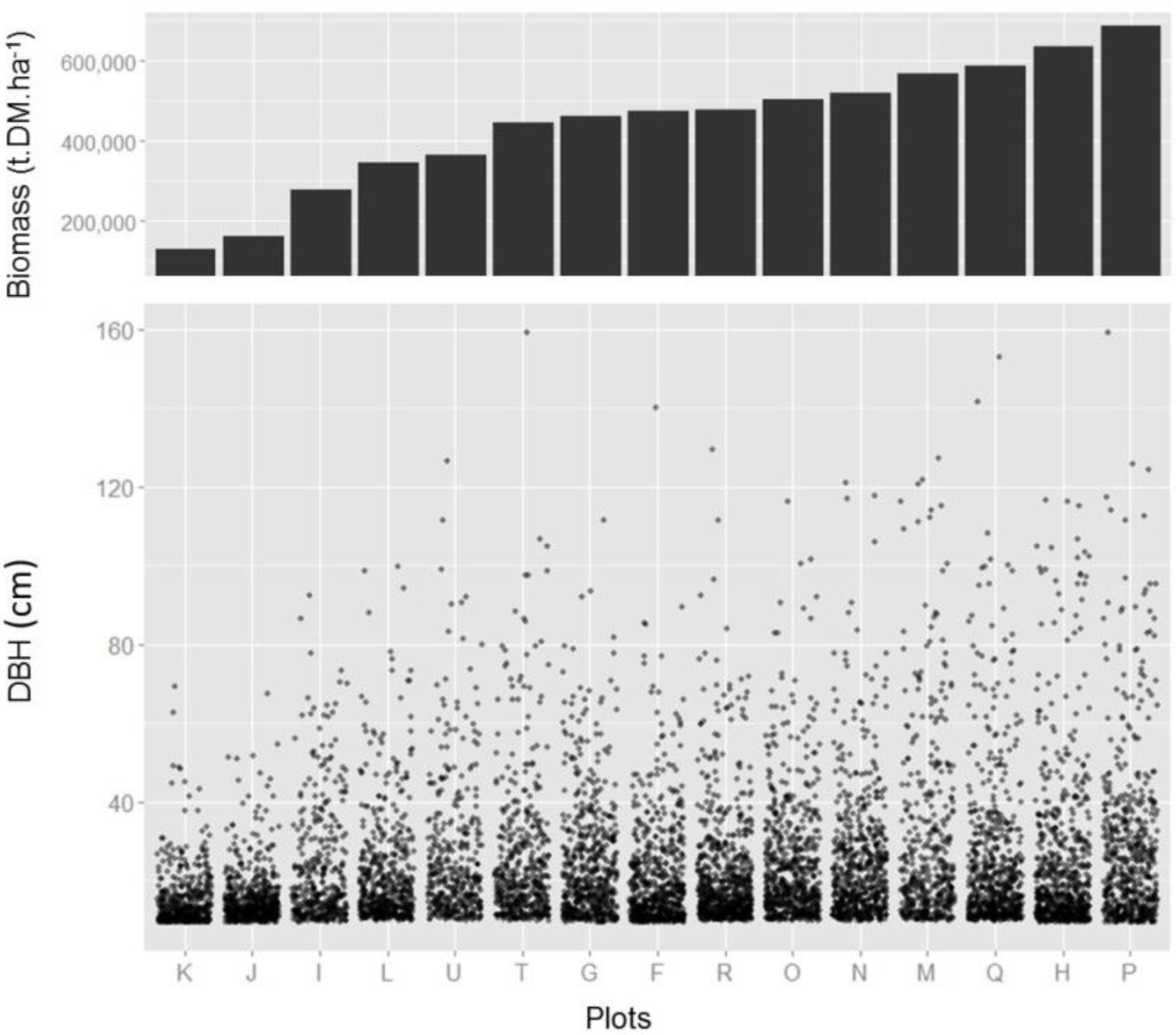
2.1. Study Area
2.2. Field Data
2.3. Lidar Data


3. Methods
3.1. Registering Field Plots with Lidar
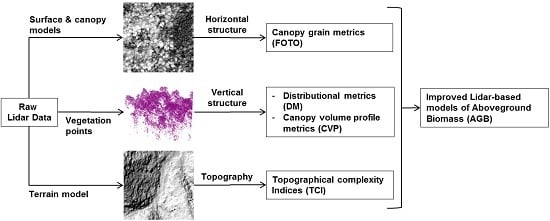
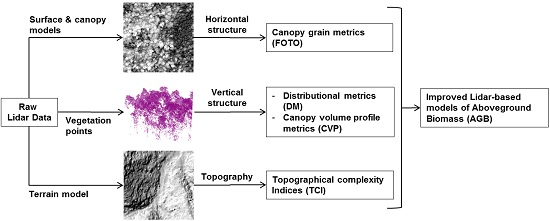
3.2. Lidar Parameter Estimation
3.2.1. Distributional Metrics (DM)
- mean height (Mf, Ml for first and last return distribution respectively), height range (Rf, Rl) and coefficient of variation of height (CVf, CVl);
- quantiles of height computed every 10th percentiles for both first (Pfi, i = 1, 10, …, 100) and last returns (Pli, i = 1, 10, …, 100), complemented by 25th, 75th, 95th and 99th percentiles, i.e., Pf25, Pf75, Pf95, Pf99 for first return distribution and Pl25, Pl75, Pl95, Pl99 for last return distribution;
- canopy densities, corresponding to proportions of points above given height threshold values. Height thresholds were defined by dividing into 10 equal parts the range between the 95th height percentile and the lowest point height associated with vegetation. The canopy densities of first and last returns, respectively Dfi and Dli (i = 0, 10, …, 90) were then computed as the proportion of points above the corresponding ith threshold value to the total number of points.
3.2.2. Canopy Volume Profile (CVP)
- Each 1-ha plot was divided into volume elements or voxels of 20 m × 20 m × 1 m each. A 20 m horizontal resolution was selected to be in line with the field sampling strategy and ensure at least 1 ground return within each quadrat to ably describe the ground topography.
- The number of Lidar returns falling in each voxel was counted, and corrected for occlusion effects according to the procedure introduced by [32].
- Empty voxels were classified into either open (OG) or closed gaps (CG). OG corresponded to those voxels above the first filled voxel with respect to the highest filled voxel within the plot. All the remaining empty voxels were classified as CG.
- Filled voxels were similarly classified into euphotic (EA) or oligophotic areas (OA). For a given subplot, EA corresponded to the voxels falling within the uppermost 65% of the canopy heights [24]. All the remaining filled voxels were classified as OA.
- Plot-level statistics were achieved by simply summing the number of voxels belonging to each class.
3.2.3. Canopy Grain Analysis (FOTO)
3.2.4. Terrain Complexity (TC)
3.3. Model Development and Statistical Analysis
4. Results

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
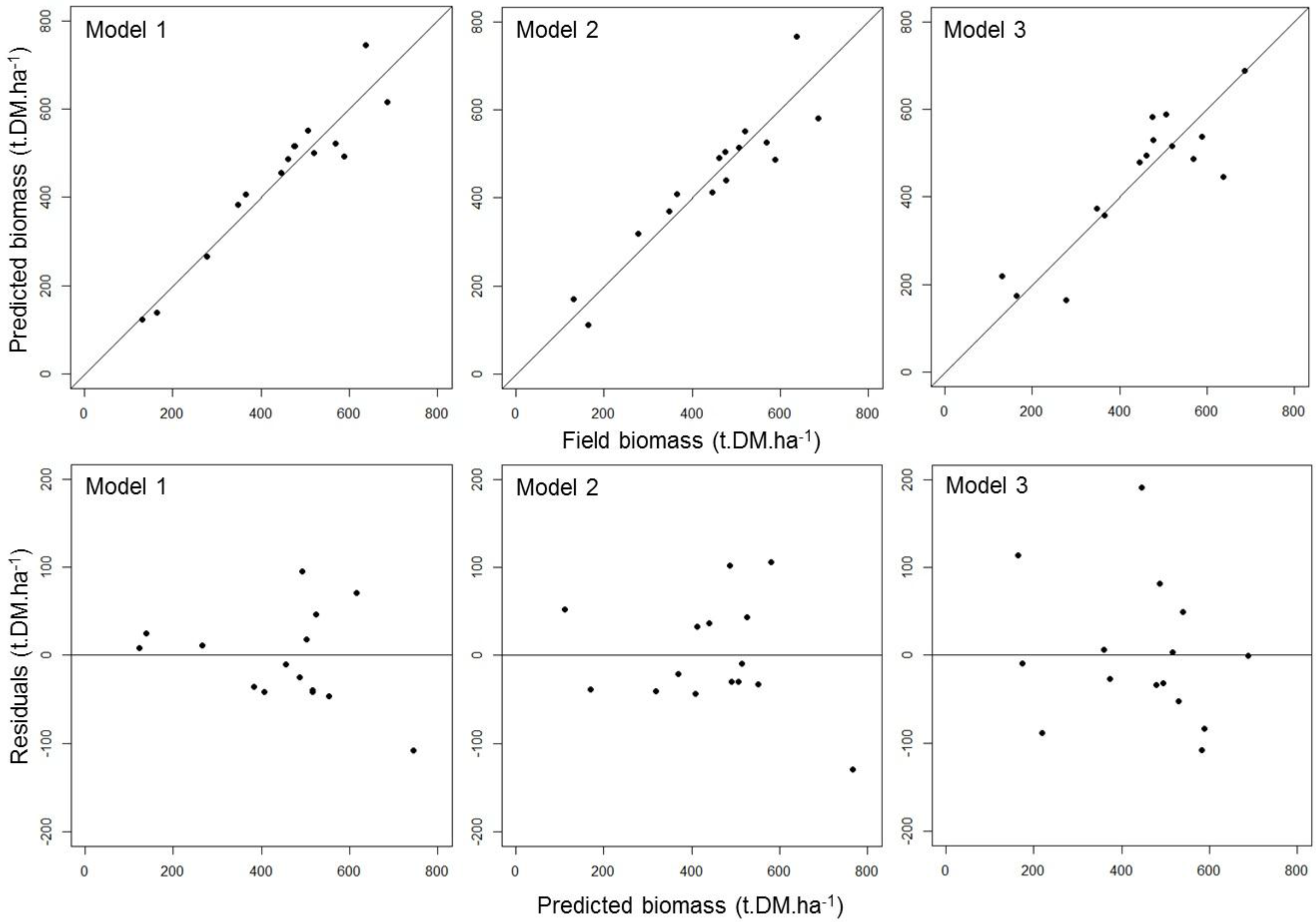
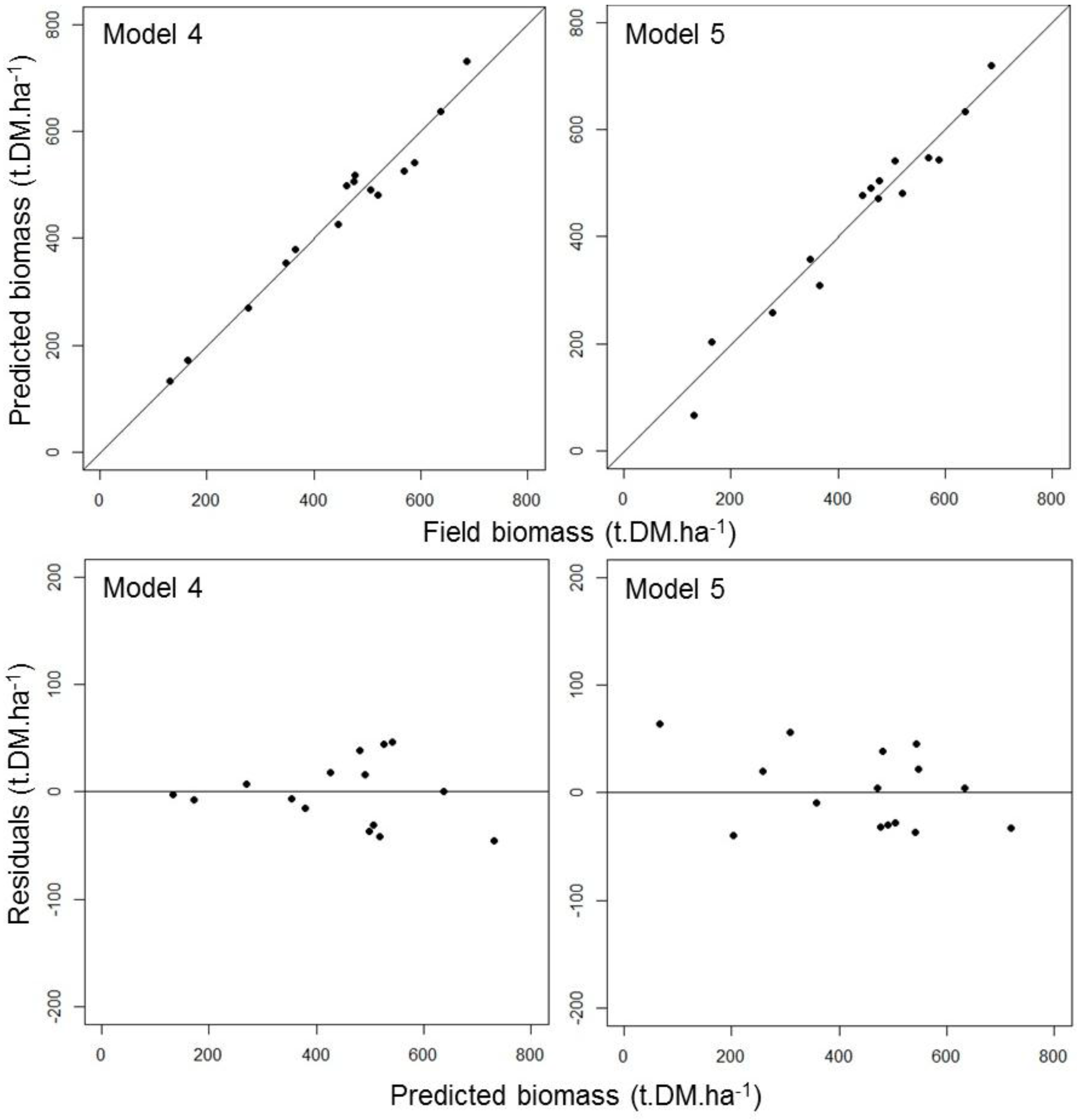
| Model | Method | Equation | RMSEcv t∙DM∙ha−1 (%) | Adj. R2 | AICc |
|---|---|---|---|---|---|
| 1 | DM | AGB ~ Pl0 + Pl99 + Df50 | 48.42 (10.92) | 0.90 | 165 |
| 2 | CVP | AGB ~ EA + OA + CG ** | 58.94 (13.29) | 0.85 | 169 |
| 3 | FOTO | AGB ~ FC1 + FC3 * + FD2 | 76.42 (17.24) | 0.74 | 181 |
| 4 | DM + FOTO + TCI | AGB ~ CVl + Df40 + TCIM + FD3 | 28.83 (6.50) | 0.96 | 156 |
| 5 | CVP + FOTO + TCI | AGB ~ EA + OG ** + TCISD + FC3+ FD1 | 32.28 (7.28) | 0.95 | 161 |


4.1. Model Performance
4.2. Limitations and Future Work
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Bhat, D.M.; Ravindranath, N.H. Above-ground standing biomass and carbon stock dynamics under a varied degree of anthropogenic pressure in tropical rain forests of Uttara Kannada District, Western Ghats, India. Taiwania 2011, 56, 85–96. [Google Scholar]
- Beer, C.; Reichstein, M.; Tomelleri, E.; Ciais, P.; Jung, M.; Carvalhais, N.; Rodenbeck, C.; Altaf Arain, M.; Baldocchi, D.; Bonan, G.B.; et al. Terrestrial gross carbon dioxide uptake: Global distribution and covariation with climate. Science 2010, 329, 834–838. [Google Scholar] [CrossRef] [PubMed]
- Dixon, R.K.; Brown, S.; Houghton, R.A.; Solomon, A.M.; Trexler, M.C.; Wisniewski, J. Carbon pools and flux of global forest ecosystems. Science 1994, 263, 185–190. [Google Scholar] [CrossRef] [PubMed]
- Van der Werf, G.R.; Morton, D.C.; Defries, R.S.; Giglio, L.; Randerson, J.T.; Collatz, G.J.; Kasibhatla, P.S. Estimates of fire emissions from an active deforestation region in the southern Amazon based on satellite data and biogeochemical modelling. Biogeosciences 2009, 6, 235–249. [Google Scholar] [CrossRef]
- UNFCC. Kyoto Protocol Reference Manual on Accounting of Emissions Assigned Amount. 2008. Available online: http://unfccc.int/ (accessed on 15 March 2015).
- Devagiri, G.M.; Money, S.; Singh, S.; Dadhawal, V.K.; Patil, P.; Khaple, A.; Devakumar, A.S.; Hubballi, S. Assessment of above ground biomass and carbon pool in different vegetation types of south western part of Karnataka, India using spectral modeling. Trop. Ecol. 2013, 54, 149–165. [Google Scholar]
- Houghton, R.A. Aboveground forest biomass and the global carbon balance. Glob. Change Biol. 2005, 11, 945–958. [Google Scholar] [CrossRef]
- Myneni, R.B.; Dong, J.; Tucker, C.J.; Kaufmann, R.K.; Kauppi, P.E.; Liski, J.; Zhou, L.; Alexeyev, V.; Hughes, M.K. A large carbon sink in the woody biomass of northern forests. Proc. Natl. Acad. Sci. USA 2001, 98, 14784–14789. [Google Scholar] [CrossRef] [PubMed]
- Couteron, P.; Barbier, N.; Proisy, C.; Pélissier, R.; Vincent, G. Linking remote-sensing information to tropical forest structure: The crucial role of modelling. Earthzine 2012, 4, 8. [Google Scholar]
- Gibbs, H.K.; Brown, S.; Niles, J.O.; Foley, J.A. Monitoring and estimating tropical forest carbon stocks: Making REDD a reality. Environ. Res. Lett. 2007, 2, 045023. [Google Scholar] [CrossRef]
- Global Observations of Forest and Land Cover Dynamics (GOFC-GOLD). Monitoring forest carbon stocks and fluxes in the Congo Basin. In Proceedings of COMIFAC Regional Workshop, Brazzaville, Congo, 2–4 February 2010.
- Saatchi, S.S.; Harris, N.L.; Brown, S.; Lefsky, M.; Mitchard, E.T.A.; Salas, W.; Zutta, B.R.; Buermann, W.; Lewis, S.L.; Hagen, S. Benchmark map of forest carbon stocks in tropical regions across three continents. Proc. Natl. Acad. Sci. USA 2011, 108, 9899–9904. [Google Scholar] [CrossRef] [PubMed]
- Asner, G.P. Tropical forest carbon assessment: Integrating satellite and airborne mapping approaches. Environ. Res. Lett. 2009, 4, 034009. [Google Scholar] [CrossRef]
- Goetz, S.J.; Baccini, A.; Laporte, N.T.; Johns, T.; Walker, W.; Kellndorfer, J.; Houghton, R.A.; Sun, M. Mapping and monitoring carbon stocks with satellite observations: A comparison of methods. Carbon Balanc. Manag. 2009, 4, 2. [Google Scholar] [CrossRef] [PubMed]
- Lu, D. The potential and challenge of remote sensing based biomass estimation. Int. J. Remote Sens. 2006, 27, 1297–1328. [Google Scholar] [CrossRef]
- De Sy, V.; Herold, M.; Achard, F.; Asner, G.P.; Held, A.; Kellndorfer, J.; Verbesselt, J. Synergies of multiple remote sensing data sources for REDD+ monitoring. Curr. Opin. Environ. Sustain. 2012, 4, 696–706. [Google Scholar] [CrossRef]
- Hurtt, G.; Xiao, X.; Keller, M.; Palace, M.; Asner, G.P.; Braswell, R.; Brondízio, E.S.; Cardoso, M.; Carvalho, C.J.R.; Fearon, M.G.; et al. IKONOS imagery for the large scale biosphere-atmosphere experiment in Amazonia (LBA). Remote Sens. Environ. 2003, 88, 111–127. [Google Scholar] [CrossRef]
- Proisy, C.; Barbier, N.; Guéroult, M.; Pélissier, R.; Gastellu-Etchegorry, J.-P.; Grau, E.; Couteron, P. Biomass Prediction in Tropical Forests: The Canopy Grain Approach. Available online: http://www.intechopen.com/books/remote-sensing-of-biomass-principles-and-applications/biomass-prediction-in-tropical-forest-the-canopy-grain-approach (accessed on 13 August 2015).
- Couteron, P.; Pélissier, R.; Nicolini, E.A.; Paget, D. Predicting tropical forest stand structure parameters from Fourier transform of very high-resolution remotely sensed canopy images. J. Appl. Ecol. 2005, 42, 1121–1128. [Google Scholar] [CrossRef] [Green Version]
- Proisy, C.; Couteron, P.; Fromard, F. Predicting and mapping mangrove biomass from canopy grain analysis using fourier-based textural ordination of IKONOS images. Remote Sens. Environ. 2007, 109, 379–392. [Google Scholar] [CrossRef]
- Coulibaly, L.; Migolet, P.; Adegbidi, G.H.; Fournier, R.; Hervet, E. Mapping aboveground forest biomass from IKONOS satellite image and multi-source geospatial data using neural networks and a Kriging interpolation. In Proceedings of IEEE International Geoscience and Remote Sensing Symposium (IGARSS’08), Boston, MA, USA, 7 June–11 June 2008; pp. 298–301.
- Ploton, P.; Pélissier, R.; Proisy, C.; Flavenot, T.; Barbier, N.; Rai, S.N.; Couteron, P. Assessing aboveground tropical forest biomass using Google Earth canopy images. Ecol. Appl. 2012, 22, 993–1003. [Google Scholar] [CrossRef] [PubMed]
- Coops, N.C.; Hilker, T.; Wulder, M.A.; St-Onge, B.; Newnham, G.; Siggins, A.; Trofymow, J.A. Estimating canopy structure of Douglas-fir forest stands from discrete-return Lidar. Trees 2007, 21, 295–310. [Google Scholar] [CrossRef]
- Lefsky, M.A.; Harding, D.; Cohen, W.B.; Parker, G.; Shugart, H.H. Surface Lidar remote sensing of basal area and biomass in deciduous forests of eastern Maryland, USA. Remote Sens. Environ. 1999, 67, 83–98. [Google Scholar] [CrossRef]
- Magnussen, S.; Boudewyn, P. Derivations of stand heights from airborne laser scanner data with canopy-based quantile estimators. Can. J. For. Res. 1998, 28, 1016–1031. [Google Scholar] [CrossRef]
- Clark, M.L.; Roberts, D.A.; Ewel, J.J.; Clark, D.B. Estimation of tropical rain forest aboveground biomass with small-footprint Lidar and hyperspectral sensors. Remote Sens. Environ. 2011, 115, 2931–2942. [Google Scholar] [CrossRef]
- Chasmer, L.; Hopkinson, C.; Smith, B.; Treitz, P. Examining the influence of changing laser pulse repetition frequencies on conifer forest canopy returns. Photogramm. Engin. Remote Sens. 2006, 72, 1359–1367. [Google Scholar] [CrossRef]
- Drake, J.B.; Dubayah, R.O.; Clark, D.B.; Knox, R.G.; Blair, J.B.; Hofton, M.A.; Prince, S.D. Estimation of tropical forest structural characteristics using large-footprint Lidar. Remote Sens. Environ. 2002, 79, 305–319. [Google Scholar] [CrossRef]
- Asner, G.P.; Hughes, R.F.; Mascaro, J.; Uowolo, A.L.; Knapp, D.E.; Jacobson, J.; Clark, J.K. High-resolution carbon mapping on the million-hectare Island of Hawaii. Front. Ecol. Environ. 2011, 9, 434–439. [Google Scholar] [CrossRef]
- Vepakomma, U.; St-Onge, B.; Kneeshaw, D. Response of a boreal forest to canopy opening: assessing vertical and lateral tree growth with multi-temporal Lidar data. Ecol. Appl. 2011, 21, 99–121. [Google Scholar] [CrossRef] [PubMed]
- Popescu, S.C.; Zhao, K. A voxel-based Lidar method for estimating crown base height for deciduous and pine trees. Remote Sens. Environ. 2008, 112, 767–781. [Google Scholar] [CrossRef]
- Riaño, D.; Meier, E.; Allgöwer, B.; Chuvieco, E.; Ustin, S.L. Modeling airborne laser scanning data for the spatial generation of critical forest parameters in fire behavior modeling. Remote Sens. Environ. 2003, 86, 177–186. [Google Scholar] [CrossRef]
- Ni-Meister, W.; Lee, S.; Strahler, A.H.; Woodcock, C.E.; Schaaf, C.; Yao, T.; Blair, J.B. Assessing general relationships between aboveground biomass and vegetation structure parameters for improved carbon estimate from Lidar remote sensing. J. Geophys. Res. Biogeo. 2010, 115, G00E11. [Google Scholar] [CrossRef]
- Gonsamo, A.; Walter, J.-M.N.; Pellikka, P. Sampling gap fraction and size for estimating leaf area and clumping indices from hemispherical photographs. Can. J. Forest Res. 2010, 40, 1588–1603. [Google Scholar] [CrossRef]
- Nelson, R.F.; Hyde, P.; Johnson, P.; Emessiene, B.; Imhoff, M.L.; Campbell, R.; Edwards, W. Investigating RaDAR-LiDAR synergy in a North Carolina pine forest. Remote Sens. Environ. 2007, 110, 98–108. [Google Scholar] [CrossRef]
- Lim, K.; Treitz, P.; Baldwin, I.; Morrisson, J.; Green, J. Lidar remote sensing of biophysical properties of northern tolerant hardwood forests. Can. J. Remote Sens. 2003, 29, 658–678. [Google Scholar] [CrossRef]
- Pélissier, R.; Pascal, J.-P.; Ayyappan, N.; Ramesh, B.R.; Aravajy, S.; Ramalingam, S.R. Twenty years tree demography in an undisturbed Dipterocarp permanent sample plot at Uppangala, Western Ghats of India—Data Paper. Ecology 2011, 92, 1376. [Google Scholar] [CrossRef]
- Pascal, J.-P.; Pélissier, R. Structure and floristic composition of a tropical evergreen forest in South-West India. J. Trop. Ecol. 1996, 12, 191–214. [Google Scholar] [CrossRef]
- Antin, C.; Pélissier, R.; Vincent, G.; Couteron, P. Crown allometries are less responsive than stem allometry to tree size and habitat variations in an Indian monsoon forest. Trees 2013, 27, 1485–1495. [Google Scholar] [CrossRef]
- Pascal, J.-P. Wet Evergreen Forests of the Western Ghats of India: Ecology, Structure, Floristic Composition and Succession (Travaux de la Section Scientifique et Technique); Institut Français de Pondichéry: Puducherry, India, 1988. [Google Scholar]
- Pélissier, R.; Pascal, J.-P.; Houllier, F.; Laborde, H. Impact of selective logging on the dynamics of a low elevation dense moist evergreen forest in the Western Ghats (South India). For. Ecol. Manag. 1998, 105, 107–119. [Google Scholar] [CrossRef]
- Rai, S.N. Productivity of Tropical Rain Forests of Karnataka. Ph.D. Thesis, University of Bombay, Bombay, India, 1981. [Google Scholar]
- Næsset, E. Predicting forest stand characteristics with airborne scanning laser using a practical two-stage procedure and field data. Remote Sens. Environ. 2002, 80, 88–99. [Google Scholar] [CrossRef]
- Means, J.E.; Acker, S.A.; Fitt, B.J.; Renslow, M.; Emerson, L.; Hendrix, C.J. Predicting forest stand characteristics with airborne scanning Lidar. Photogramm. Eng. Remote Sens. 2000, 66, 1367–1371. [Google Scholar]
- Barbier, N.; Proisy, C.; Véga, C.; Sabatier, D.; Couteron, P. Bidirectional texture function of high resolution optical images of tropical forest: An approach using LiDAR hillshade simulations. Remote Sens. Environ. 2011, 115, 167–179. [Google Scholar] [CrossRef]
- Lu, H.; Liu, X.; Bian, L. Terrain complexity: Definition, index, and DEM resolution. Proc. SPIE 2007, 6753, 675323. [Google Scholar]
- O’Brien, R.M. A caution regarding rules of thumb for variance inflation factors. Qual. Quant. 2007, 41, 673–690. [Google Scholar] [CrossRef]
- Burnham, K.P.; Anderson, D.R. Model Selection and Multimodel Inference: A Practical Information-Theoretic Approach, 2nd ed.; Springer: New York, NY, USA, 2002; p. 488. [Google Scholar]
- Hurvich, C.M.; Tsai, C.-L. Regression and time series model selection in small samples. Biometrika 1989, 76, 297–307. [Google Scholar] [CrossRef]
- Picard, R.R.; Cook, R.D. Cross-validation of regression models. J. Am. Stat. Assoc. 1984, 79, 575–583. [Google Scholar] [CrossRef]
- Hall, S.A.; Burke, I.C.; Box, D.O.; Kaufmann, M.R.; Stoker, J.M. Estimating stand structure using discrete-return Lidar: An example from low density, fire prone ponderosa pine forests. For. Ecology Manag. 2005, 208, 189–209. [Google Scholar] [CrossRef]
- Barbier, N.; Couteron, P. Attenuating the bidirectional texture variation of satellite images of tropical forests: No use to cry for a shadow! Remote Sens. Environ. 2015. submitted. [Google Scholar]
- Jakubowski, M.K.; Guo, Q.; Kelly, M. Tradeoffs between Lidar pulse density and forest measurement accuracy. Remote Sens. Environ. 2013, 130, 245–253. [Google Scholar] [CrossRef]
- Barbier, N.; Couteron, P.; Proisy, C.; Malhi, Y.; Gastellu-Etchegorry, J.-P. The variation of apparent crown size and canopy heterogeneity across lowland Amazonian forests. Glob. Ecol. Biogeo. 2010, 19, 72–84. [Google Scholar] [CrossRef]
- Robert, A.; Moravie, M.-A. Topographic variation and stand structure heterogeneity in a wet evergreen forest of India. J. Trop. Ecol. 2003, 19, 697–707. [Google Scholar] [CrossRef]
- Véga, C.; Hamrouni, A.; El Mokhtari, S.; Morel, J.; Bock, J.; Renaud, J.-P.; Bouvier, M.; Durrieu, S.P. Trees: A point-based approach to forest tree extraction from Lidar data. Inter. J. Appl. Earth Observ. Geoinf. 2014, 33, 98–108. [Google Scholar] [CrossRef]
- Meyer, V.; Saatchi, S.S.; Chave, J.; Dalling, J.W.; Bohlman, S.; Fricker, G.A.; Hubbell, S. Detecting tropical forest biomass dynamics from repeated airborne Lidar measurements. Biogeosciences 2013, 10, 5421–5438. [Google Scholar] [CrossRef]
- Chave, J.; Andalo, C.; Brown, S.; Cairns, M.; Chambers, J.; Eamus, D.; Fölster, H.; Fromard, F.; Higuchi, N.; Kira, T.; et al. Tree allometry and improved estimation of carbon stocks and balance in tropical forests. Oecologia 2005, 145, 87–99. [Google Scholar] [CrossRef] [PubMed]
- Gobakken, T.; Næsset, E. Assessing effects of positioning errors and sample plot size on biophysical stand properties derived from airborne laser scanner data. Can. J. For. Res. 2009, 39, 1036–1052. [Google Scholar] [CrossRef]
- Frazer, G.W.; Magnussen, S.; Wulder, M.A.; Niemann, K.O. Simulated impact of sample plot size and co-registration error on the accuracy and uncertainty of Lidar-derived estimates of forest stand biomass. Remote Sens. Environ. 2011, 115, 636–649. [Google Scholar] [CrossRef]
- Ruiz, L.A.; Hermosilla, T.; Mauro, F.; Godino, M. Analysis of the influence of plot size and Lidar density on forest structure attribute estimates. Forests 2014, 5, 936–951. [Google Scholar] [CrossRef]
- Khosravipour, A.; Skidmore, A.K.; Wang, T.; Isenburg, M.; Khoshelham, K. Effect of slope on treetop detection using a Lidar canopy height model. ISPRS J. Photogramm. Remote Sens. 2015, 104, 44–52. [Google Scholar] [CrossRef]
- Véga, C.; Renaud, J.P.; Durrieu, S.; Bouvier, M. On the interest of penetration depth, canopy area and volume metrics to improve Lidar-based models of forest parameters. Remote Sens. Environ. 2015. submitted. [Google Scholar]
© 2015 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Véga, C.; Vepakomma, U.; Morel, J.; Bader, J.-L.; Rajashekar, G.; Jha, C.S.; Ferêt, J.; Proisy, C.; Pélissier, R.; Dadhwal, V.K. Aboveground-Biomass Estimation of a Complex Tropical Forest in India Using Lidar. Remote Sens. 2015, 7, 10607-10625. https://doi.org/10.3390/rs70810607
Véga C, Vepakomma U, Morel J, Bader J-L, Rajashekar G, Jha CS, Ferêt J, Proisy C, Pélissier R, Dadhwal VK. Aboveground-Biomass Estimation of a Complex Tropical Forest in India Using Lidar. Remote Sensing. 2015; 7(8):10607-10625. https://doi.org/10.3390/rs70810607
Chicago/Turabian StyleVéga, Cédric, Udayalakshmi Vepakomma, Jules Morel, Jean-Luc Bader, Gopalakrishnan Rajashekar, Chandra Shekhar Jha, Jérôme Ferêt, Christophe Proisy, Raphaël Pélissier, and Vinay Kumar Dadhwal. 2015. "Aboveground-Biomass Estimation of a Complex Tropical Forest in India Using Lidar" Remote Sensing 7, no. 8: 10607-10625. https://doi.org/10.3390/rs70810607
APA StyleVéga, C., Vepakomma, U., Morel, J., Bader, J. -L., Rajashekar, G., Jha, C. S., Ferêt, J., Proisy, C., Pélissier, R., & Dadhwal, V. K. (2015). Aboveground-Biomass Estimation of a Complex Tropical Forest in India Using Lidar. Remote Sensing, 7(8), 10607-10625. https://doi.org/10.3390/rs70810607