
A Point Cloud Filtering Approach to Generating DTMs for Steep Mountainous Areas and Adjacent Residential Areas


Abstract
:
1. Introduction
1.1. Background
- (1)
- In large-scale applications, LiDAR provides an effective method for generating high-quality DTMs but at a relatively high cost, the investment of this technique could be limited [8]. In China, LiDAR is more often used in developed urban areas than in areas having little economic support. The surveying and mapping departments of less developed areas often prefer to use aerial photogrammetry in producing DTMs to cut on cost.
- (2)
- The performance of stereo image matching has been significantly developed in recent years. One of the representative algorithms is semi-global matching (SGM) [9]. SGM can generate a digital surface model (DSM) with a spatial resolution equivalent to that of stereo images; as a result, the density of the point cloud obtained from aerial digital photogrammetry could be close or even higher than that obtained from airborne LiDAR, allowing for the production of high-quality DTMs.
- (3)
- In a typical processing pipeline, after DTM generation, digital photogrammetry can continue to produce other mapping products, such as digital orthophoto maps and digital line graphics. Thus, this technique has a richer lineup of product types and a higher return on investment.
1.2. Related Works
1.2.1. Slope-Based Filters
1.2.2. Morphology-Based Filters
1.2.3. Surface-Based Filters
1.2.4. Segmentation-Based Filters
1.2.5. Other Filtering Methods
1.3. The Proposed Approach
2. Methodology
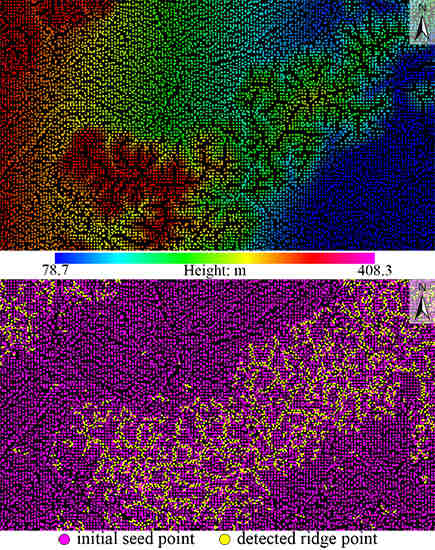
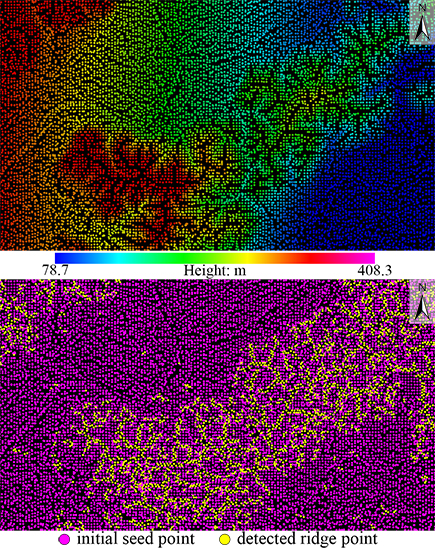
2.1. Potential Ridge Point Detection

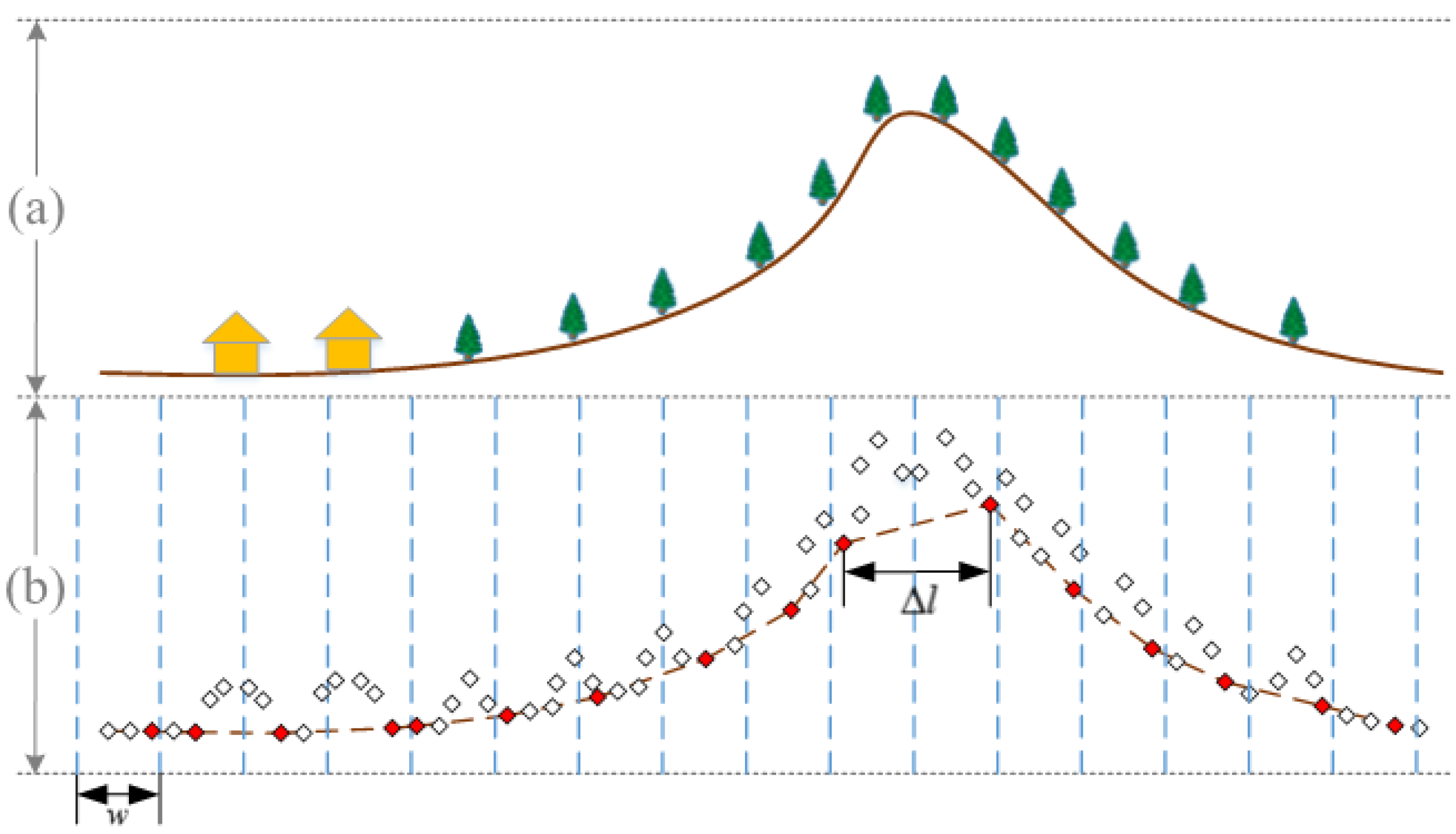
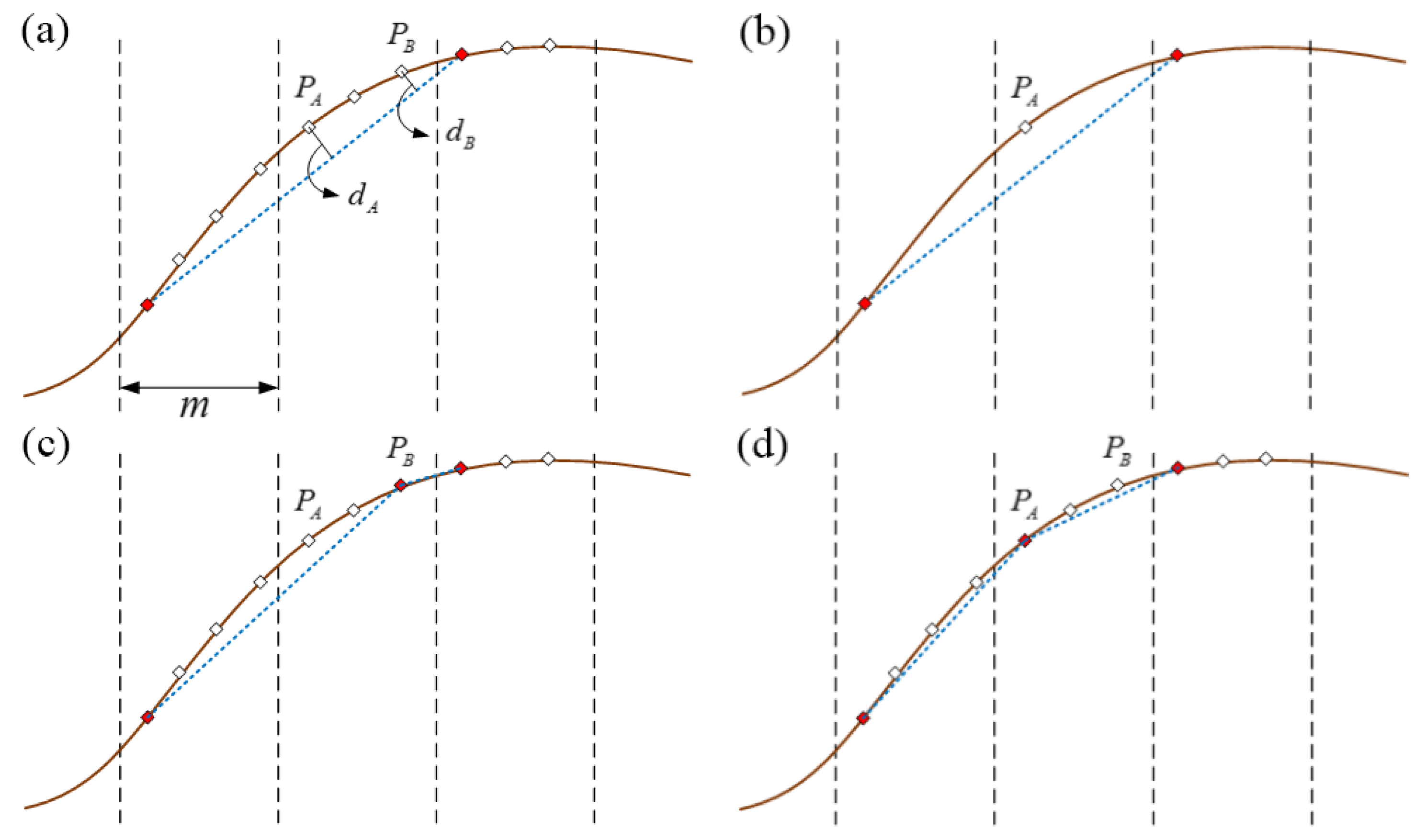
- (1)
- The descending trend on the opposite sides of the ridge. Owing to this feature, Figure 1b shows that the distance between the seed points at the ridge is apparently longer. Compared with others, the horizontal component of this distance could be closer to 2. Thus, the values for the three sides of the judging triangle in the TIN are calculated. If at least one is greater than the threshold , the triangle can be inferred as a potential ridge triangle. In our approach, is the product of the coefficient and , with generally having a value close to 2. Considering that the topographical trend of the ridge can be represented along the X-axis or Y-axis direction, can be calculated using the following equation:where and are the space coordinates of the triangle vertices.
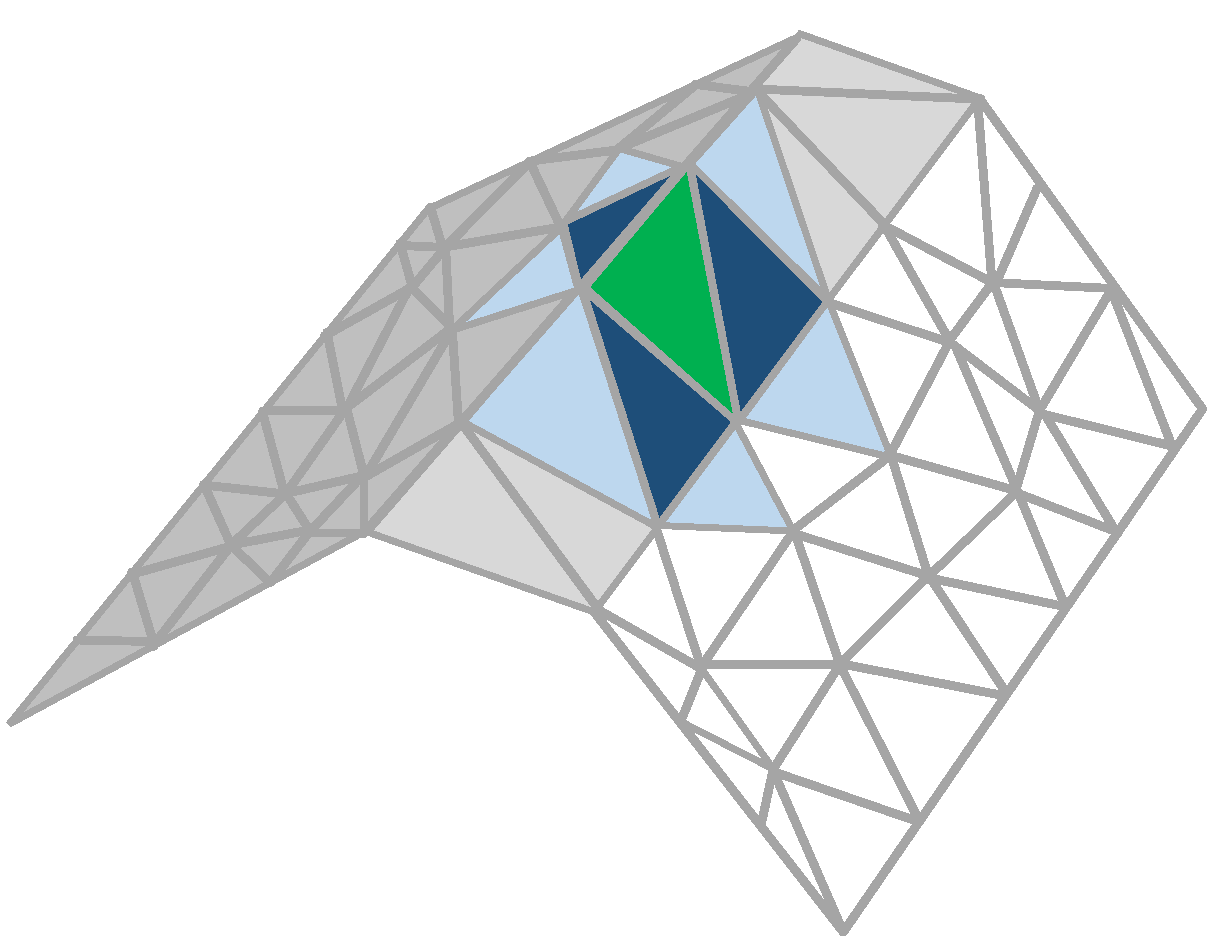
- (2)
- The convex slope inversion constraint. The main implication of this assumption is that the slope changes dramatically at the ridge, as proposed in the earlier literature for ridge point extraction from a DTM [50]. In the TIN structure constructed with sparse seed points, the changing trend of the slope is retained even if the topographic feature of the ridge has weakened. According to this trend, the potential ridge triangle can be extracted from the TIN by calculating the dihedral angle between the judging triangle and its adjacent triangles. The triangles that constitute a considerable angle with the ridge triangle should exist on both sides of the mountain. In our approach, the triangles connected to the directly adjacent triangles are also used for the judgment considering that these three triangles may only include triangles on one side, as shown in Figure 2. A triangle is generally determined as a ridge triangle if at least two triangles in its vicinity fulfill the following conditions: (i) the dihedral angle between the judging triangle and the adjacent triangle is greater than the threshold ; (ii) the gravity center of the adjacent triangle is located below the plane of the judging triangle; and (iii) no common point exists between the satisfied triangles.



2.2. Optimal Selection of Seed Points


2.3. A Memory-Efficient TIN Densification Strategy

- (1)
- The optimized seed points are all labeled as terrain points.
- (2)
- A TIN is constructed using terrain points.
- (3)
- All the off-terrain points are judged one by one. The distance and angles are calculated for the judging point and its corresponding triangle. The point is then labeled as a terrain point if the threshold condition is satisfied. After traversing all the off-terrain points, the total number of current terrain points, is recorded, where represents the iteration rounds.
- (4)
- A grid with cell size is created, and all grid cells are then traversed. If a grid cell has terrain points in it, then only the lowest terrain point is retained, whereas all the other terrain points are relabeled as off-terrain points. The value of can be determined according to the resolution of the final acquired DTM.
- (5)
- Steps (2) to (4) are repeated. In step (3), the proportion of the increased terrain points in the total points is calculated as follows:
3. Experiments and Results
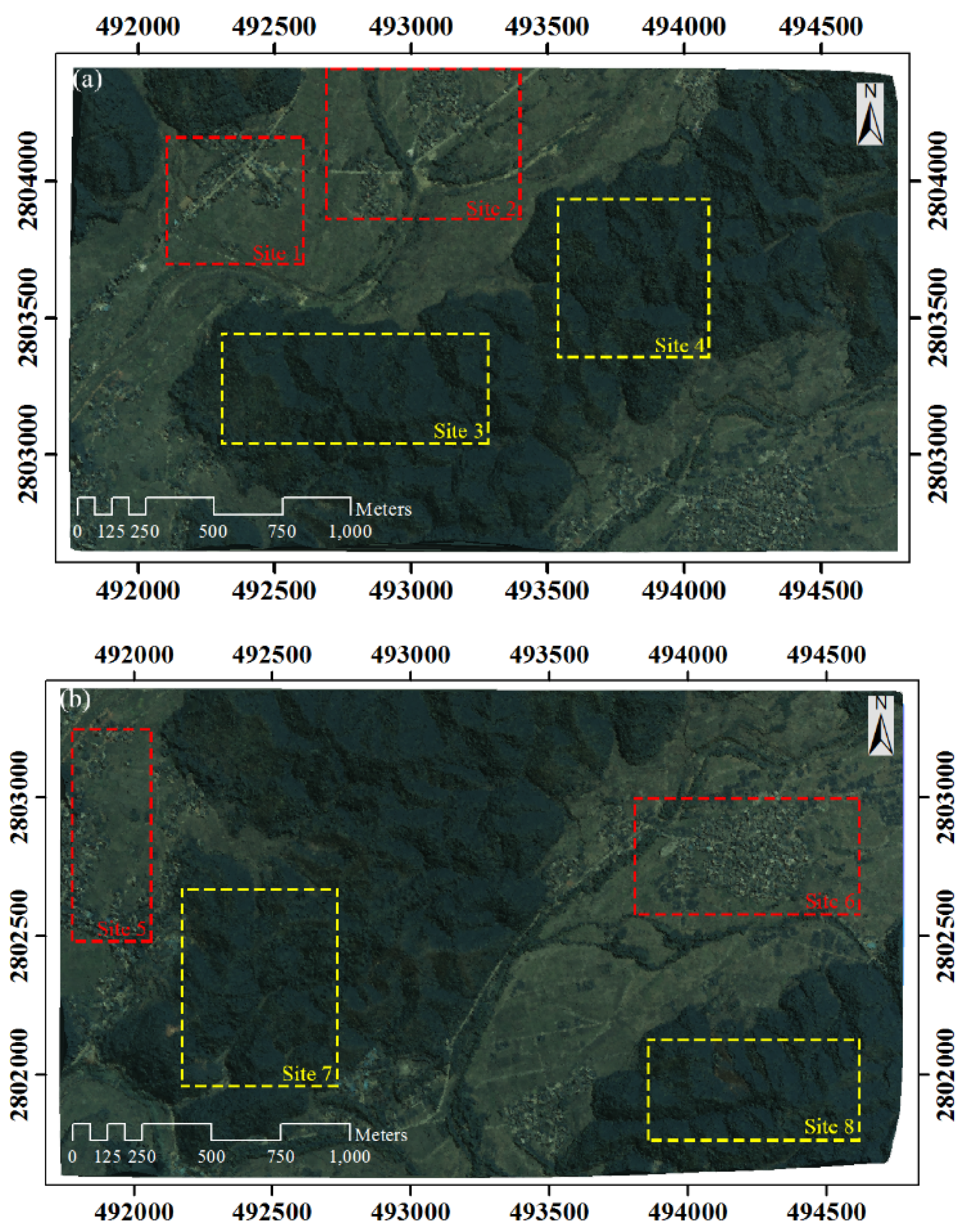
3.1. Testing Data

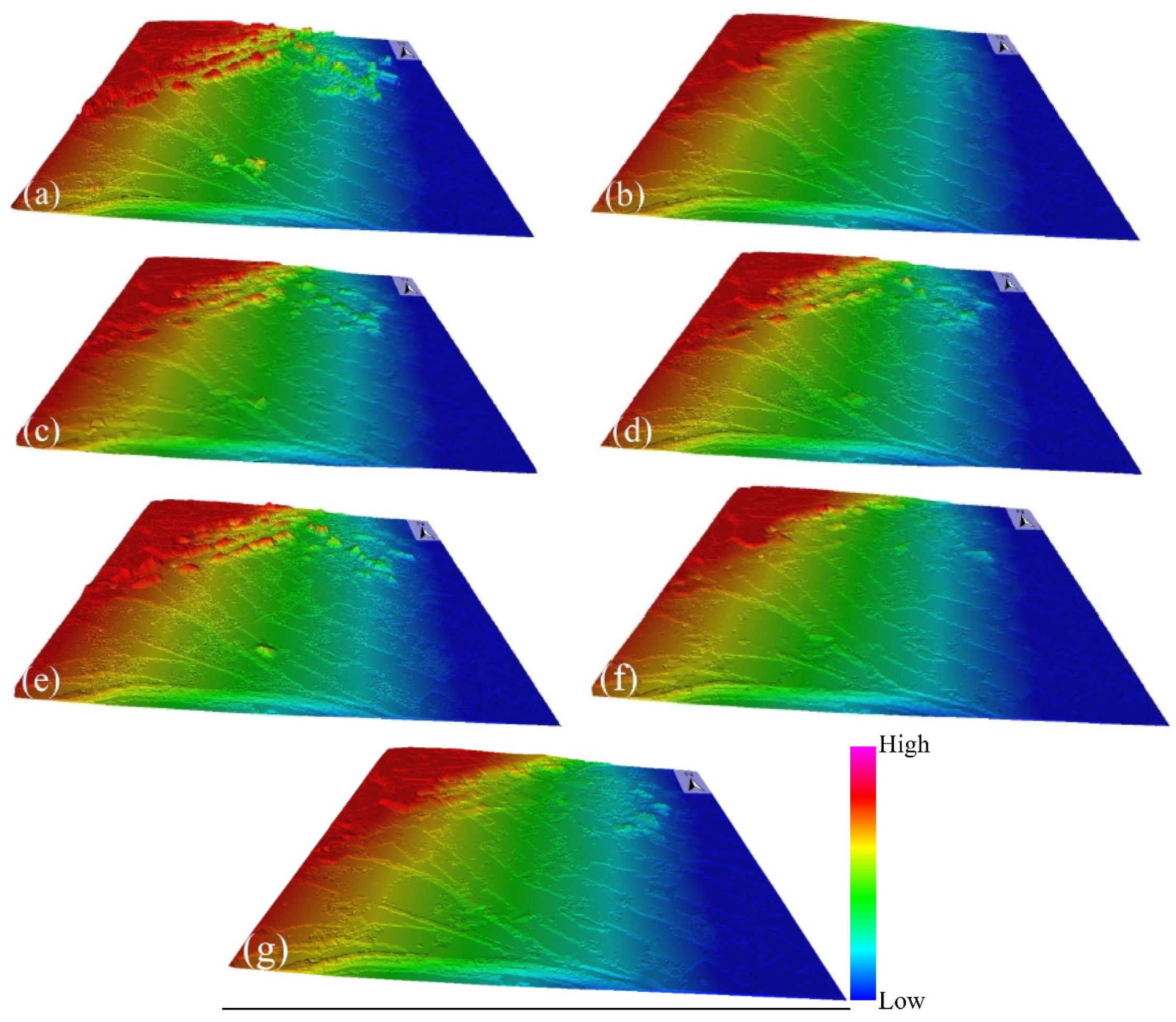
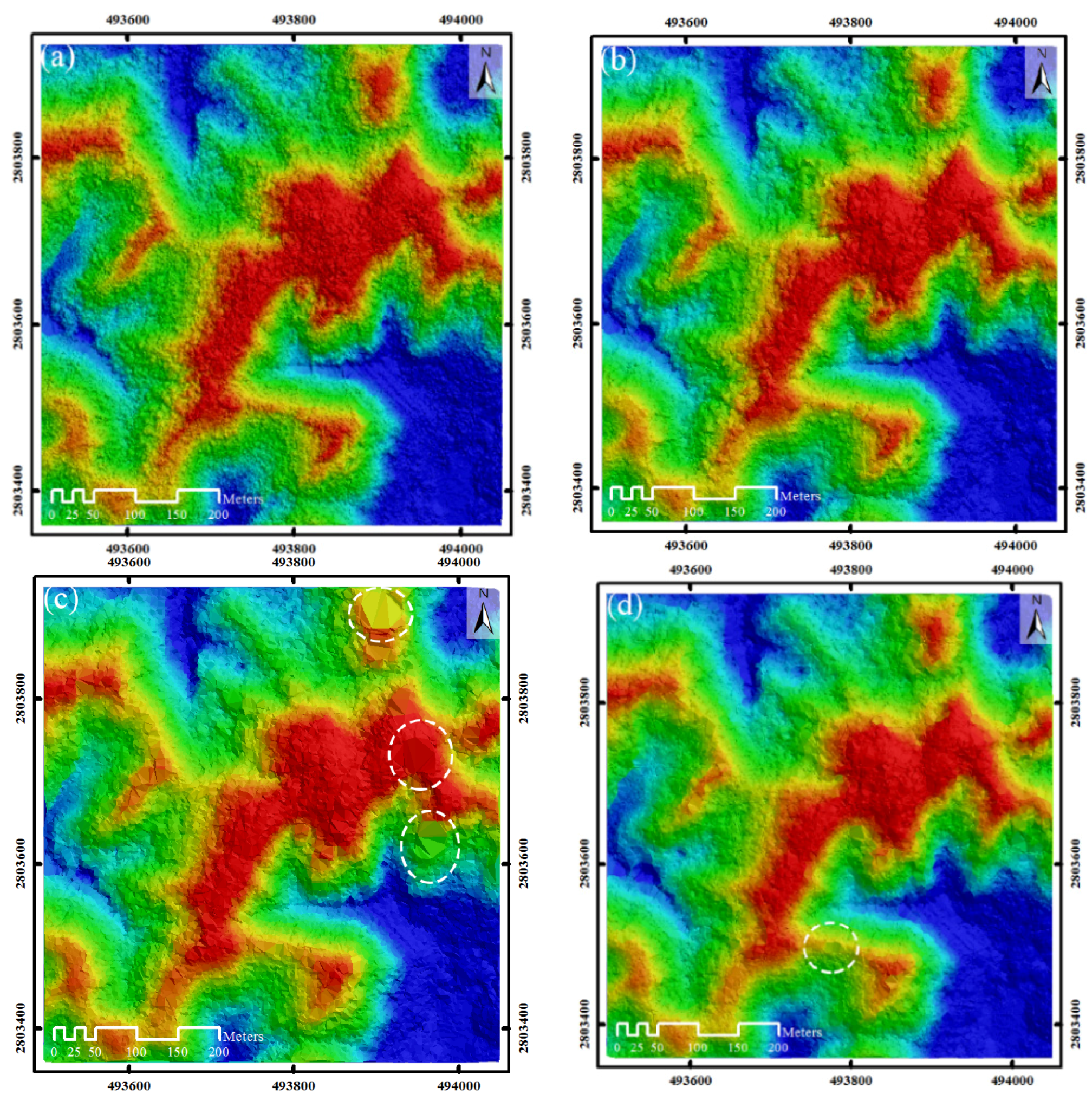
3.2. Evaluation and Comparison

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Values |
|---|---|
| Grid cell size | 20 m |
| Maximum terrain angle | 88.0° |
| Maximum angle | 6.0° |
| Maximum distance | 1.4 m |
| Minimum edge length | 1 m |
| Minimum times of edge length in ridge | 1.5 |
| Minimum angle in ridge | 25 |
| Confidence probability | 98% |
| Method | |||||||
|---|---|---|---|---|---|---|---|
| PM | 1.022 | 1.381 | 1.266 | 1.652 | 1.085 | 1.423 | 1.353 |
| MC | 0.860 | 1.296 | 1.161 | 1.309 | 0.965 | 1.165 | 1.163 |
| LP | 1.431 | 1.638 | 1.568 | 1.348 | 1.066 | 1.228 | 1.395 |
| PTD | 0.440 | 0.742 | 0.651 | 1.750 | 1.509 | 1.645 | 1.286 |
| Proposed | 0.455 | 0.359 | 0.396 | 1.461 | 0.960 | 1.259 | 0.963 |
| Method | |||||||
|---|---|---|---|---|---|---|---|
| PM | 1.340 | 1.690 | 1.486 | 1.445 | 2.032 | 1.709 | 1.612 |
| MC | 1.296 | 1.633 | 1.437 | 1.349 | 1.090 | 1.250 | 1.338 |
| LP | 1.761 | 2.044 | 1.876 | 1.298 | 1.047 | 1.202 | 1.544 |
| PTD | 0.552 | 0.904 | 0.710 | 1.601 | 1.715 | 1.649 | 1.309 |
| Proposed | 0.591 | 0.603 | 0.596 | 1.271 | 1.215 | 1.249 | 1.007 |






4. Discussion
4.1. Main Features of the Proposed Method
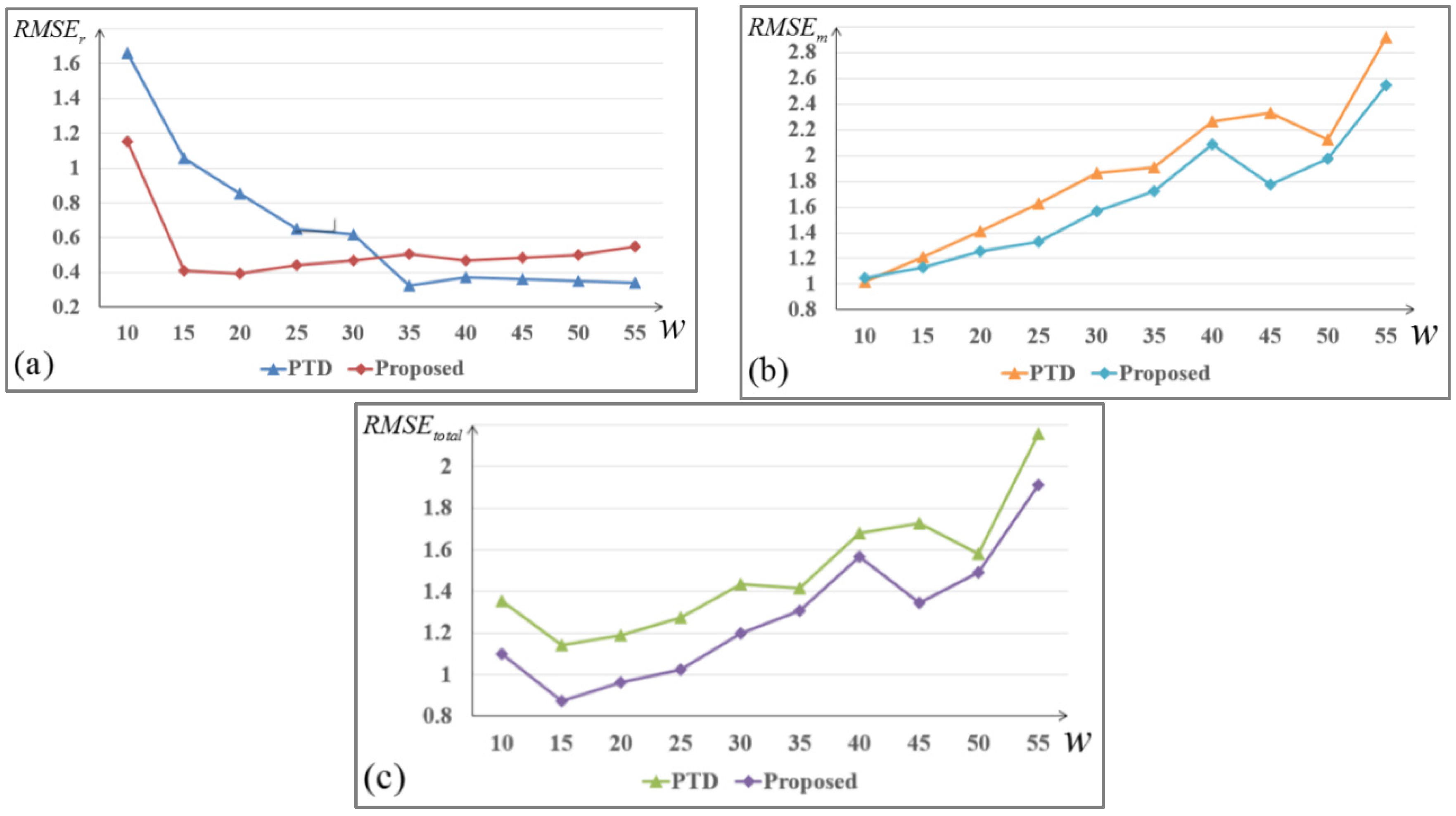
4.2. Sensitivity Analysis of the Parameters

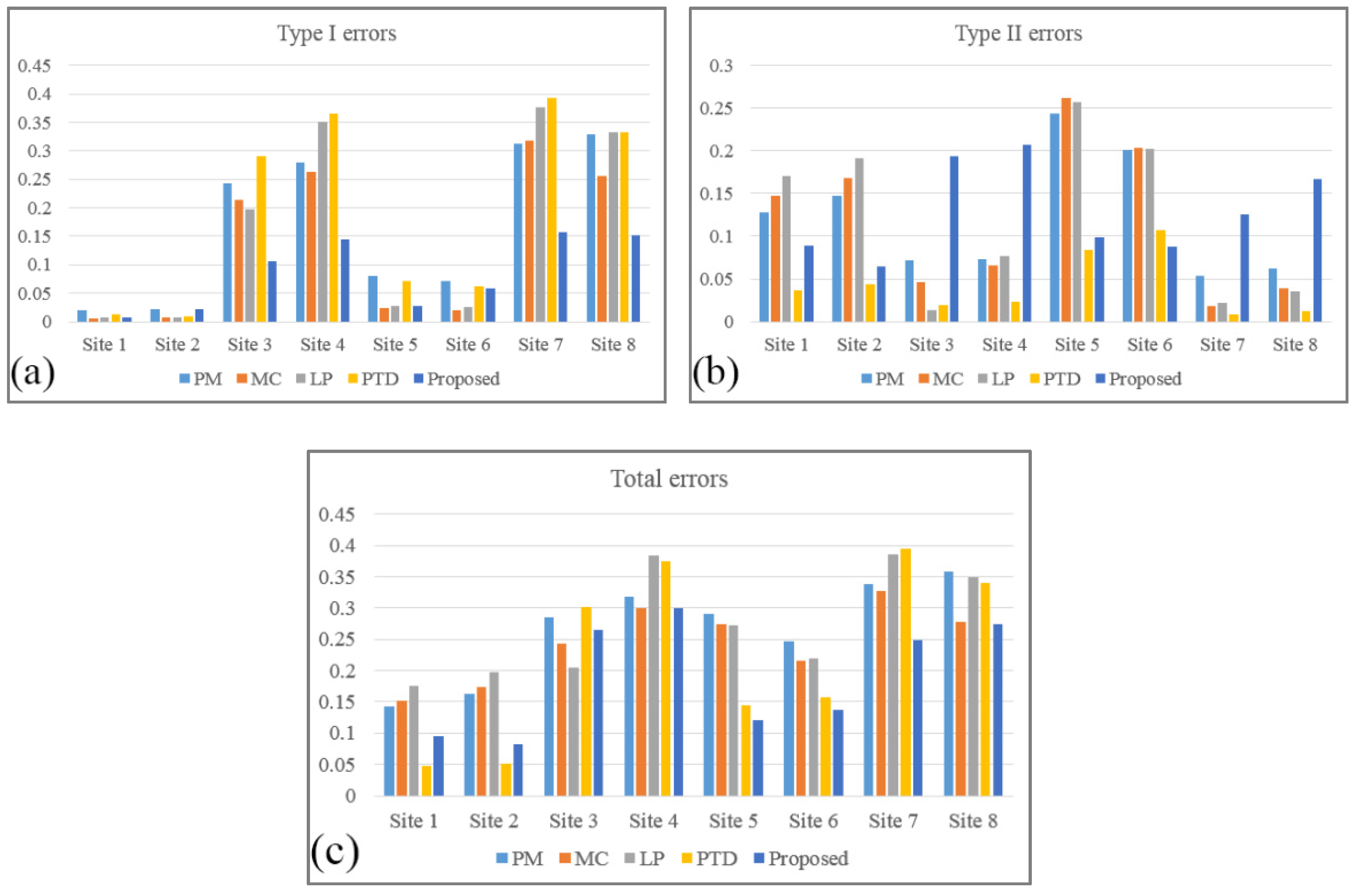
4.3. Accuracies, Errors, and Uncertainties

5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Miller, C.L.; Laflamme, R.A. The digital terrain model: Theory and application. Photogramm. Eng. 1958, 24, 433–442. [Google Scholar]
- Chen, L.C.; Teo, T.A.; Rau, J.Y. Adaptive patch projection for the generation of orthophotos from satellite images. Photogramm. Eng. Remote Sens. 2005, 71, 1321–1327. [Google Scholar] [CrossRef]
- Jochem, A.; Höfle, B.; Rutzinger, M.; Pfeifer, B. Automatic roof plane detection and analysis in airborne lidar point clouds for solar potential assessment. Sensors 2009, 9, 5241–5262. [Google Scholar] [CrossRef] [PubMed]
- Dorninger, P.; Pfeifer, N. A comprehensive automated 3D approach for building extraction, reconstruction, and regularization from airborne laser scanning point clouds. Sensors 2008, 8, 7323–7343. [Google Scholar] [CrossRef]
- Gesch, D.B.; Verdin, K.L.; Greenlee, S.K. New land surface digital elevation model covers the Earth. EOS Trans. 1999, 80, 69–70. [Google Scholar] [CrossRef]
- Rabus, B.; Eineder, M.; Roth, A.; Bamler, R. The shuttle radar topography mission—A new class of digital elevation models acquired by spaceborne radar. ISPRS J. Photogramm. Remote Sens. 2003, 57, 241–262. [Google Scholar] [CrossRef]
- Krieger, G.; Moreira, A.; Fiedler, H.; Hajnsek, I.; Werner, M.; Younis, M.; Zink, M. TanDEM-X: A satellite formation for high-resolution SAR interferometry. IEEE Trans. Geosci. Remote Sens. 2007, 45, 3317–3341. [Google Scholar] [CrossRef]
- Pitt, D.G.; Woods, M.; Penner, M. A comparison of point clouds derived from stereo imagery and airborne laser scanning for the area-based estimation of forest inventory attributes in Boreal Ontario. Can. J. Remote Sens. 2014, 40, 214–232. [Google Scholar] [CrossRef]
- Hirschmüller, H. Stereo processing by semiglobal matching and mutual information. IEEE Trans. Pattern Anal. Mach. Intell. 2008, 30, 328–341. [Google Scholar] [CrossRef] [PubMed]
- Weidner, U.; Förstner, W. Towards automatic building extraction from high-resolution digital elevation models. ISPRS J. Photogramm. Remote Sens. 1995, 50, 38–49. [Google Scholar] [CrossRef]
- Sithole, G.; Vosselman, G. Experimental comparison of filter algorithms for bare-Earth extraction from airborne laser scanning point clouds. ISPRS J. Photogramm. Remote Sens. 2004, 59, 85–101. [Google Scholar] [CrossRef]
- Vosselman, G. Slope based filtering of laser altimetry data. Int. Arch. Photogramm. Remote Sens. 2000, 33, 935–942. [Google Scholar]
- Sithole, G. Filtering of laser altimetry data using a slope adaptive filter. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2001, 34, 203–210. [Google Scholar]
- Susaki, J. Adaptive slope filtering of airborne LiDAR data in urban areas for digital terrain model (DTM) generation. Remote Sens. 2012, 4, 1804–1819. [Google Scholar] [CrossRef] [Green Version]
- Shan, J.; Aparajithan, S. Urban DEM generation from raw lidar data. Photogramm. Eng. Remote Sens. 2005, 71, 217–226. [Google Scholar] [CrossRef]
- Wu, B.; Yu, B.; Huang, C.; Wu, Q.; Wu, J. Automated extraction of ground surface along urban roads from mobile laser scanning point clouds. Remote Sens. Lett. 2016, 7, 170–179. [Google Scholar] [CrossRef]
- Meng, X. A slope- and elevation-based filter to remove non-ground measurements from airborne LIDAR data. In Proceedings of the ISPRS WG III/3, III/4, V/3 Workshop “Laser Scanning 2005”, Enschede, The Netherlands, 12–14 September 2005.
- Meng, X.; Wang, L.; Silván-Cárdenas, J.L.; Currit, N. A multi-directional ground filtering algorithm for airborne LIDAR. ISPRS J. Photogramm. Remote Sens. 2009, 64, 117–124. [Google Scholar] [CrossRef]
- Guan, H.; Li, J.; Yu, Y.; Zhong, L.; Ji, Z. DEM generation from lidar data in wooded mountain areas by cross-section-plane analysis. Int. J. Remote Sens. 2014, 35, 927–948. [Google Scholar] [CrossRef]
- Zhang, K.; Chen, S.C.; Whitman, D.; Shyu, M. L.; Yan, J.; Zhang, C. A progressive morphological filter for removing nonground measurements from airborne LIDAR data. IEEE Trans. Geosci. Remote Sens. 2003, 41, 872–882. [Google Scholar] [CrossRef]
- Liu, L.; Shao, Z. A Multi-scale Progressive Framework for Ground Segmentation of Airborne LiDAR Data. In Geo-Informatics in Resource Management and Sustainable Ecosystem, 1st ed.; Springer Berlin Heidelberg: Berlin, Germany, 2013; pp. 418–424. [Google Scholar]
- Pingel, T.J.; Clarke, K.C.; McBride, W.A. An improved simple morphological filter for the terrain classification of airborne LIDAR data. ISPRS J. Photogramm. Remote Sens. 2013, 77, 21–30. [Google Scholar] [CrossRef]
- Silván-Cárdenas, J.L.; Wang, L. A multi-resolution approach for filtering LiDAR altimetry data. ISPRS J. Photogramm. Remote Sens. 2006, 61, 11–22. [Google Scholar] [CrossRef]
- Mongus, D.; Žalik, B. Parameter-free ground filtering of LiDAR data for automatic DTM generation. ISPRS J. Photogramm. Remote Sens. 2012, 67, 1–12. [Google Scholar] [CrossRef]
- Mongus, D.; Zalik, B. Computationally efficient method for the generation of a digital terrain model from airborne LiDAR data using connected operators. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2014, 7, 340–351. [Google Scholar] [CrossRef]
- Kraus, K.; Pfeifer, N. Determination of terrain models in wooded areas with airborne laser scanner data. ISPRS J. Photogramm. Remote Sens. 1998, 53, 193–203. [Google Scholar] [CrossRef]
- Evans, J.S.; Hudak, A.T. A multiscale curvature algorithm for classifying discrete return lidar in forested environments. IEEE Trans. Geosci. Remote Sens. 2007, 45, 1029–1038. [Google Scholar] [CrossRef]
- Chen, C.; Li, Y.; Li, W.; Dai, H. A multiresolution hierarchical classification algorithm for filtering airborne LiDAR data. ISPRS J. Photogramm. Remote Sens. 2013, 82, 1–9. [Google Scholar] [CrossRef]
- Hu, H.; Ding, Y.; Zhu, Q.; Wu, B.; Lin, H.; Du, Z.; Zhang, Y.; Zhang, Y. An adaptive surface filter for airborne laser scanning point clouds by means of regularization and bending energy. ISPRS J. Photogramm. Remote Sens. 2014, 92, 98–111. [Google Scholar] [CrossRef]
- Maguya, A.S.; Junttila, V.; Kauranne, T. Adaptive algorithm for large scale DTM interpolation from lidar data for forestry applications in steep forested terrain. ISPRS J. Photogramm. Remote Sens. 2013, 85, 74–83. [Google Scholar] [CrossRef]
- Maguya, A.S.; Junttila, V.; Kauranne, T. Algorithm for extracting digital terrain models under forest canopy from airborne LiDAR data. Remote Sens. 2014, 6, 6524–6548. [Google Scholar] [CrossRef]
- Axelsson, P. DEM generation from laser scanner data using adaptive TIN models. Int. Arch. Photogramm. Remote Sens. 2000, 33, 111–118. [Google Scholar]
- Meng, X.; Currit, N.; Zhao, K. Ground filtering algorithms for airborne LiDAR data: A review of critical issues. Remote Sens. 2010, 2, 833–860. [Google Scholar] [CrossRef]
- Terrascan, Terrasolid’s Software for LiDAR Data Processing and 3D Vector Data Creation. 2012. Available online: http://www.terrasolid.com/products/terrascanpage.php (accessed on 20 October 2015).
- Zhang, J.; Lin, X. Filtering airborne LiDAR data by embedding smoothness-constrained segmentation in progressive TIN densification. ISPRS J. Photogramm. Remote Sens. 2013, 81, 44–59. [Google Scholar] [CrossRef]
- Lin, X.; Zhang, J. Segmentation-based filtering of airborne LiDAR point clouds by progressive densification of terrain segments. Remote Sens. 2014, 6, 1294–1326. [Google Scholar] [CrossRef]
- Sithole, G.; Vosselman, G. Filtering of airborne laser scanner data based on segmented point clouds. In Proceedings of the ISPRS WG III/3, III/4, V/3 Workshop “Laser Scanning 2005”, Enschede, The Netherlands, 12–14 September 2005.
- Hu, X.; Li, X.; Zhang, Y. Fast filtering of LiDAR point cloud in urban areas based on scan line segmentation and GPU acceleration. IEEE Geosci. Remote Sens. Lett. 2013, 10, 308–312. [Google Scholar]
- Yan, M.; Blaschke, T.; Liu, Y.; Wu, L. An object-based analysis filtering algorithm for airborne laser scanning. Int. J. Remote Sens. 2012, 33, 7099–7116. [Google Scholar] [CrossRef]
- Cui, Z.; Zhang, K.; Zhang, C.; Chen, S.C. A cluster-based morphological filter for geospatial data analysis. In Proceedings of the 2nd ACM SIGSPATIAL International Workshop on Analytics for Big Geospatial Data, Orlando, FL, USA, 5–8 November 2013.
- Richter, R.; Behrens, M.; Döllner, J. Object class segmentation of massive 3D point clouds of urban areas using point cloud topology. Int. J. Remote Sens. 2013, 34, 8408–8424. [Google Scholar] [CrossRef]
- Lodha, S.K.; Kreps, E.J.; Helmbold, D.P.; Fitzpatrick, D.N. Aerial LiDAR Data Classification Using Support Vector Machines. In Proceedings of the 3rd International Symposium on 3D DATA Processing, Visualization, and Transmission, Chapel Hill, NC, USA, 14–16 June 2006.
- Lodha, S.K.; Fitzpatrick, D.M.; Helmbold, D.P. Aerial lidar data classification using adaboost. In Proceedings of the 6th International Conference on 3D Digital Imaging and Modeling, Montreal, QC, Canada, 21–23 August 2007.
- Nourzad, S.H.H.; Pradhan, A. Ensemble methods for binary classifications of airborne LiDAR data. J. Comput. Civil Eng. 2012, 28, 04014021. [Google Scholar] [CrossRef]
- Lu, W.L.; Murphy, K.P.; Little, J.J.; Sheffer, A.; Fu, H. A hybrid conditional random field for estimating the underlying ground surface from airborne lidar data. IEEE Trans. Geosci. Remote Sens. 2009, 47, 2913–2922. [Google Scholar]
- Niemeyer, J.; Rottensteiner, F.; Soergel, U. Conditional random fields for lidar point cloud classification in complex urban areas. Int. Arch. Photogramm. 2012, 1, 263–268. [Google Scholar] [CrossRef]
- Gerke, M.; Xiao, J. Fusion of airborne laserscanning point clouds and images for supervised and unsupervised scene classification. ISPRS J. Photogramm. Remote Sens. 2014, 87, 78–92. [Google Scholar] [CrossRef]
- Montealegre, A.L.; Maria, T.L.; de la Riva, J. A comparison of open-source LiDAR Filtering algorithms in a mediterranean forest environment. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2015, 8, 4072–4085. [Google Scholar] [CrossRef]
- Wang, H.; Wang, S.; Chen, Q.; Jin, W.; Sun, M. An improved filter of progressive TIN densification for LiDAR point cloud data. Wuhan Univ. J. Nat. Sci. 2015, 20, 362–368. [Google Scholar] [CrossRef]
- Riazanoff, S.; Cervelle, B.; Chorowicz, J. Ridge and valley line extraction from digital terrain models. Remote Sens. 1988, 9, 1175–1183. [Google Scholar] [CrossRef]
- Chen, Q.; Wang, S.; Wang, B.; Sun, M. Automatic registration method for fusion of ZY-1-02C satellite images. Remote Sens. 2014, 6, 157–179. [Google Scholar] [CrossRef]
- Galassi, M. GNU Scientific Library. Available online: http://www.gnu.org/software/gsl/ (accessed on 22 December 2015).
- Zhang, R.; Cui, Z. Airborne LIDAR Data Processing and Analysis Tools. Available online: http://lidar.ihrc.fiu.edu/lidartool.html (accessed on 14 January 2016).
- Hudak, A.; Shrestha, R. Multiscale Curvature Classification for LIDAR Data. Available online: http://sourceforge.net/p/mcclidar/wiki/Home/ (accessed on 14 January 2016).
- McGaughey, R. FUSION/LDV: Software for LIDAR Data Analysis and Visualization; USDA Forest Service, Pacific Northwest Research Station, University of Washington: Seatle, WA, USA, 2014; p. 175. [Google Scholar]
- Julge, K.; Ellmann, A.; Gruno, A. Performance analysis of freeware filtering algorithms for determining ground surface from airborne laser scanning data. J. Appl. Remote Sens. 2014, 8, 083573. [Google Scholar] [CrossRef]
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons by Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, Q.; Wang, H.; Zhang, H.; Sun, M.; Liu, X. A Point Cloud Filtering Approach to Generating DTMs for Steep Mountainous Areas and Adjacent Residential Areas. Remote Sens. 2016, 8, 71. https://doi.org/10.3390/rs8010071
Chen Q, Wang H, Zhang H, Sun M, Liu X. A Point Cloud Filtering Approach to Generating DTMs for Steep Mountainous Areas and Adjacent Residential Areas. Remote Sensing. 2016; 8(1):71. https://doi.org/10.3390/rs8010071
Chicago/Turabian StyleChen, Qi, Huan Wang, Hanchao Zhang, Mingwei Sun, and Xiuguo Liu. 2016. "A Point Cloud Filtering Approach to Generating DTMs for Steep Mountainous Areas and Adjacent Residential Areas" Remote Sensing 8, no. 1: 71. https://doi.org/10.3390/rs8010071
APA StyleChen, Q., Wang, H., Zhang, H., Sun, M., & Liu, X. (2016). A Point Cloud Filtering Approach to Generating DTMs for Steep Mountainous Areas and Adjacent Residential Areas. Remote Sensing, 8(1), 71. https://doi.org/10.3390/rs8010071