
Discrimination of Settlement and Industrial Area Using Landscape Metrics in Rural Region

 ,
, 
Abstract
:
1. Introduction
2. Study Area and Data
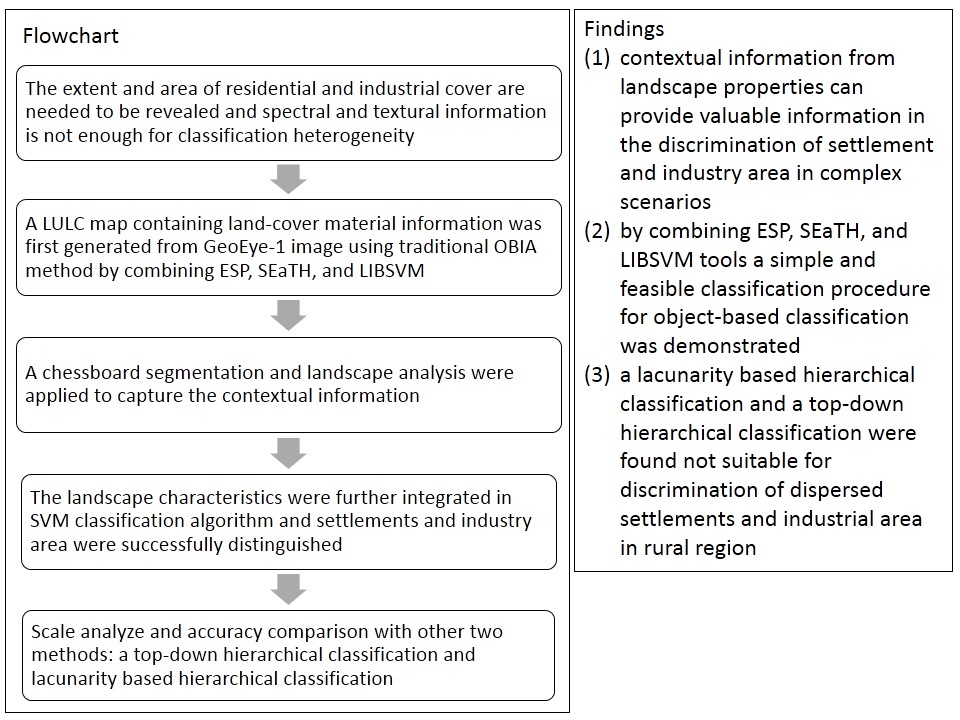
2.1. Study Area
2.2. Data and Preprocessing
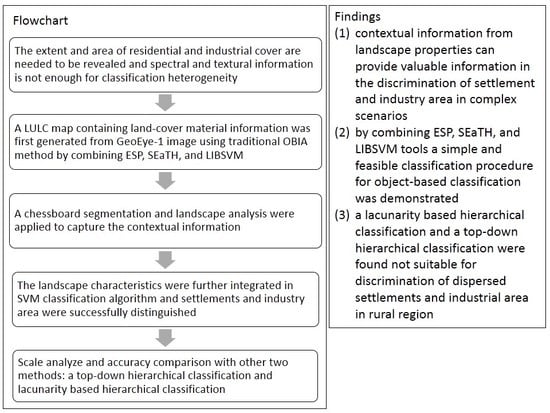
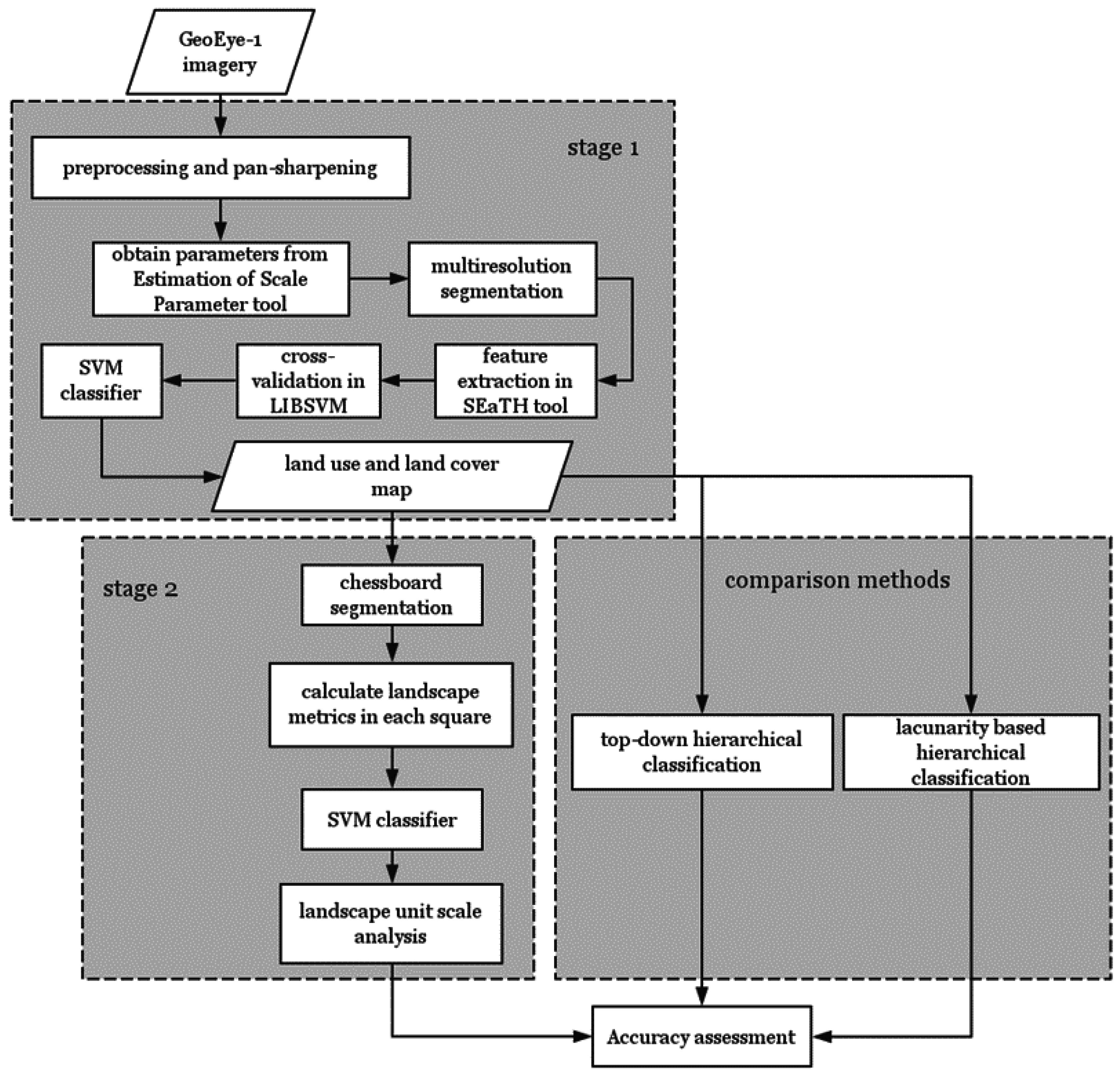
3. Methodology
- Top-down hierarchical classification network using only spectral, textural and shape properties; and
- Hierarchical classification integrating lacunarity properties.
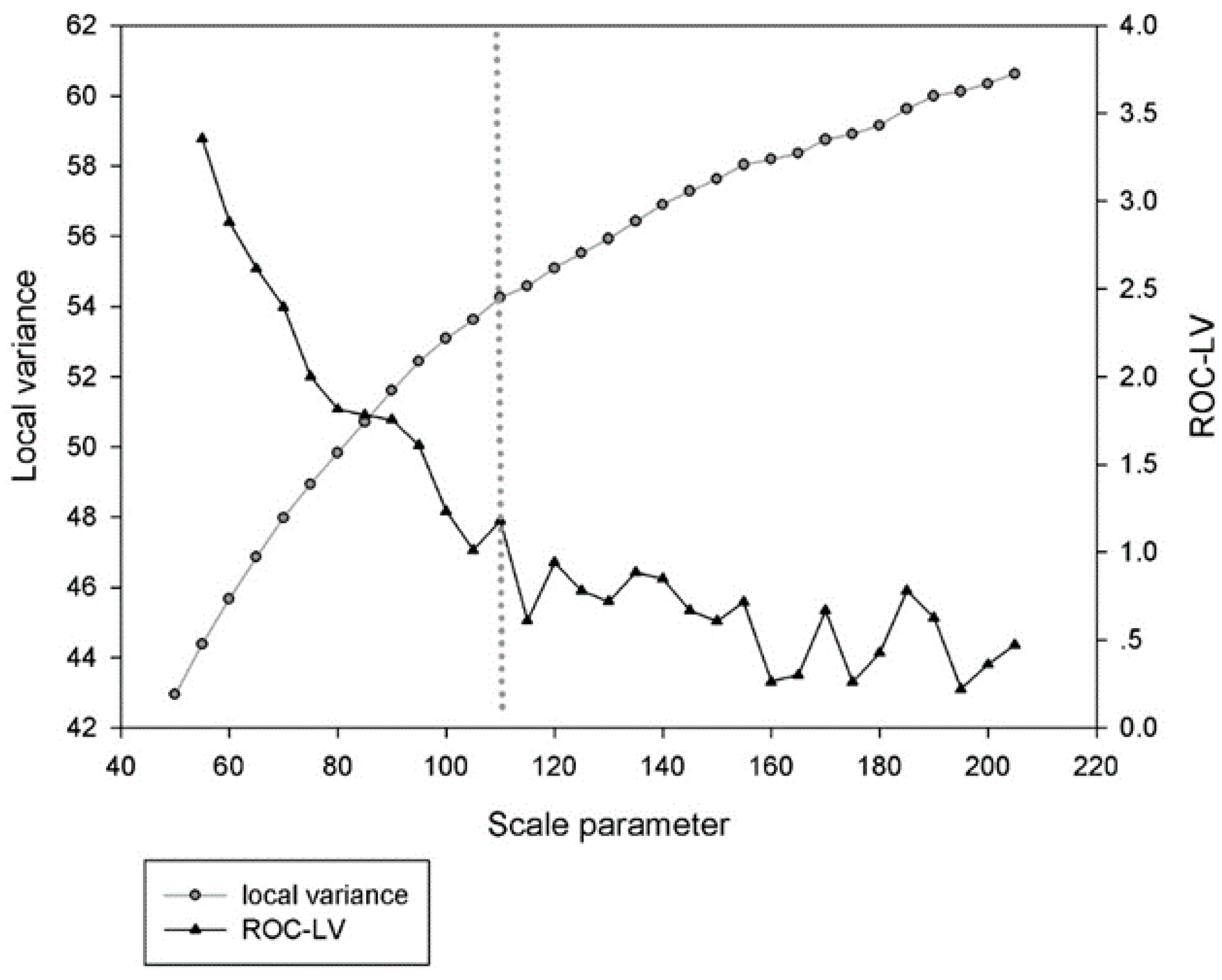
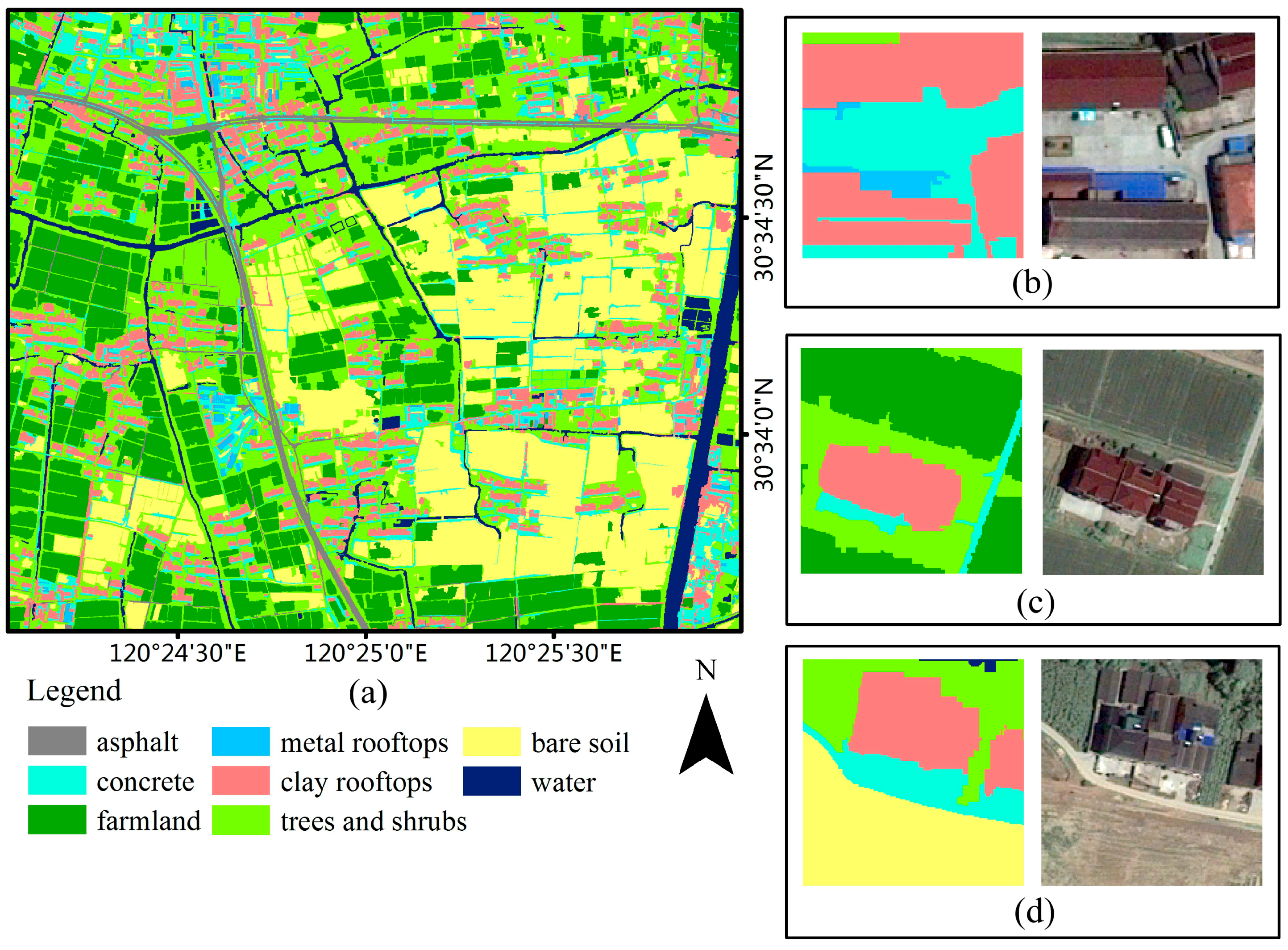
3.1. Stage 1: Mapping Land-Use and Land-Cover (LULC) Using OBIA
3.2. Stage 2: Landscape Metrics and Chessboard Segmentation
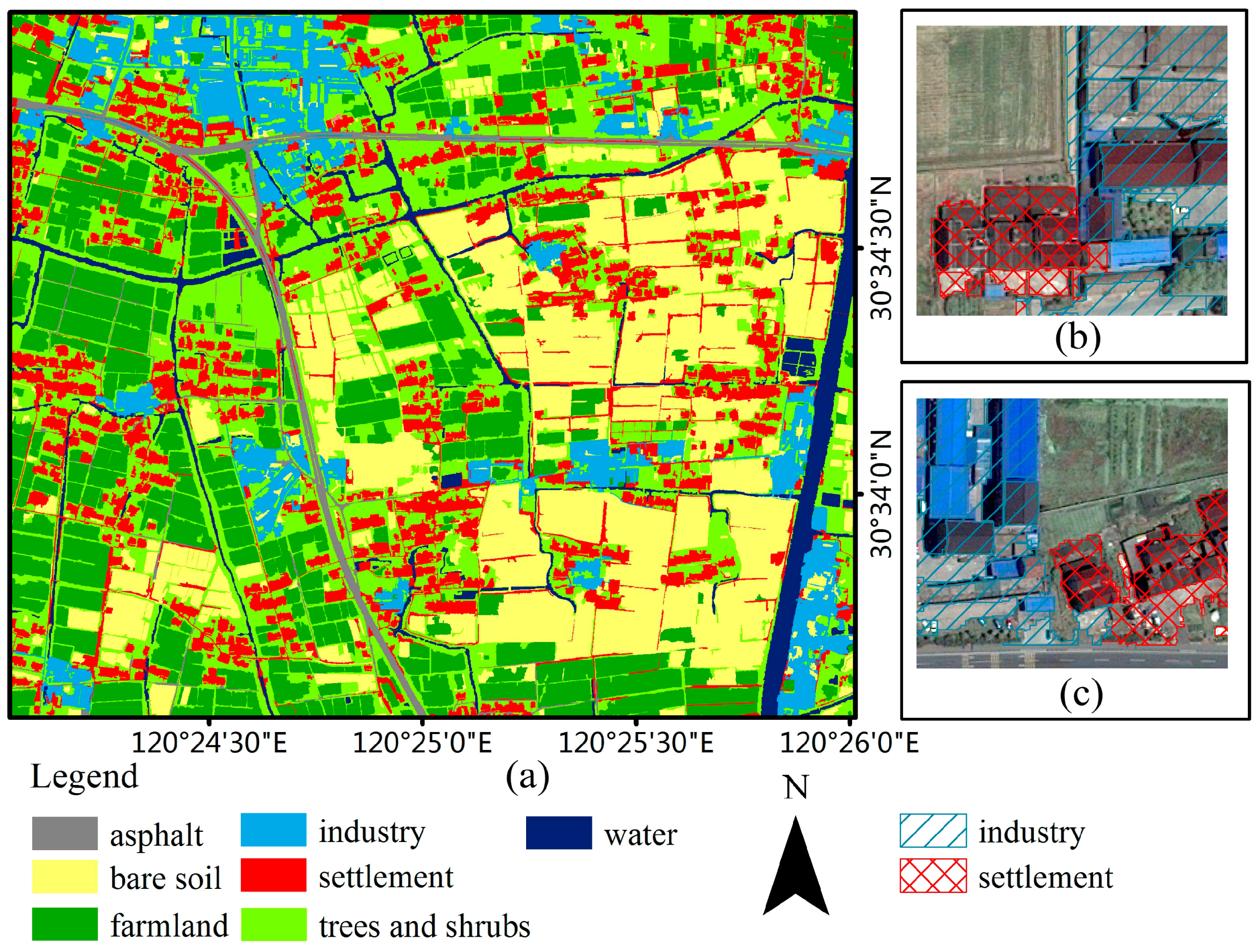
3.3. Top-Down Hierarchical Classification
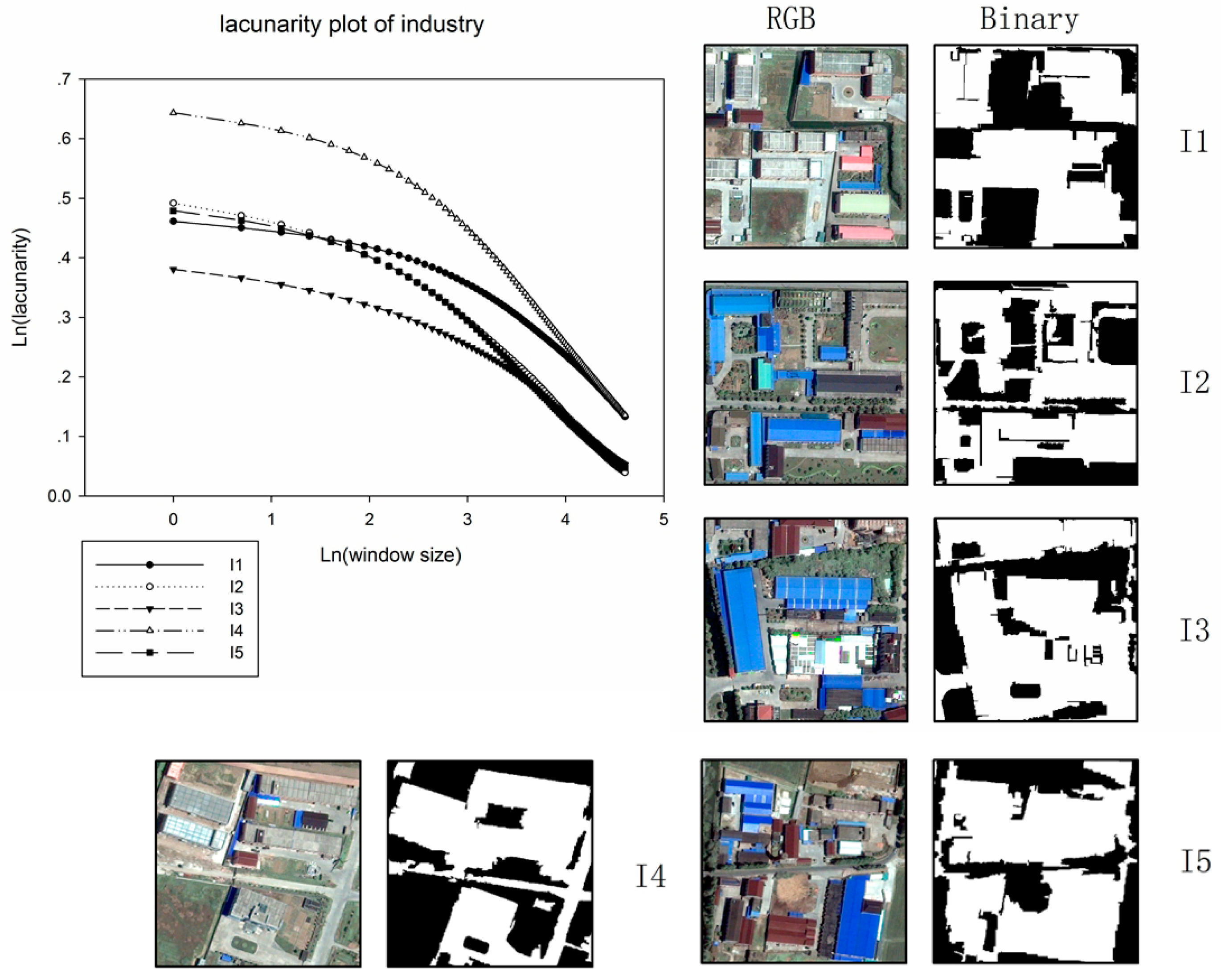
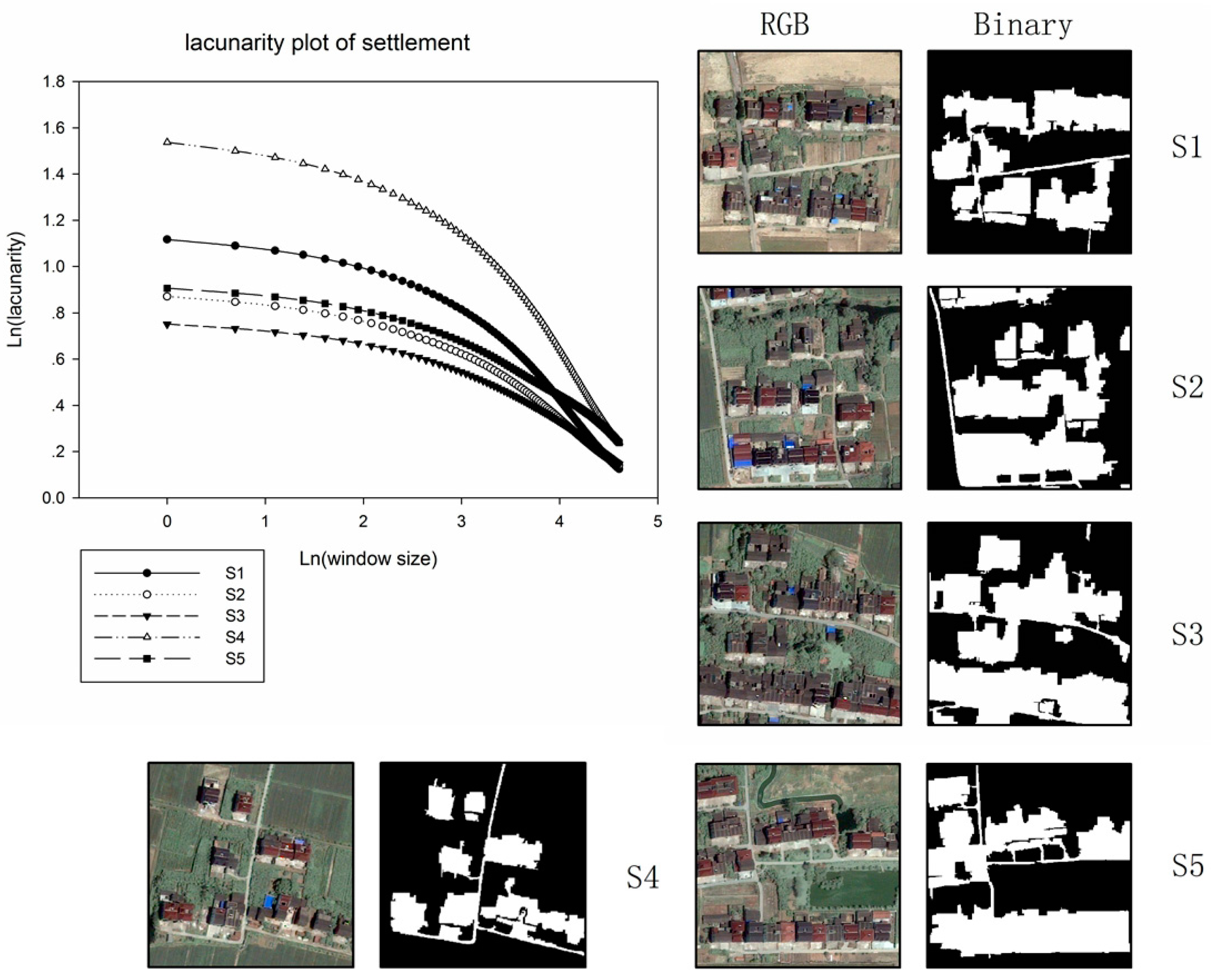
3.4. Lacunarity Based Hierarchical Classification
3.5. Accuracy Assessment
4. Results
4.1. Stage 1 Result and Accuracy Assessment
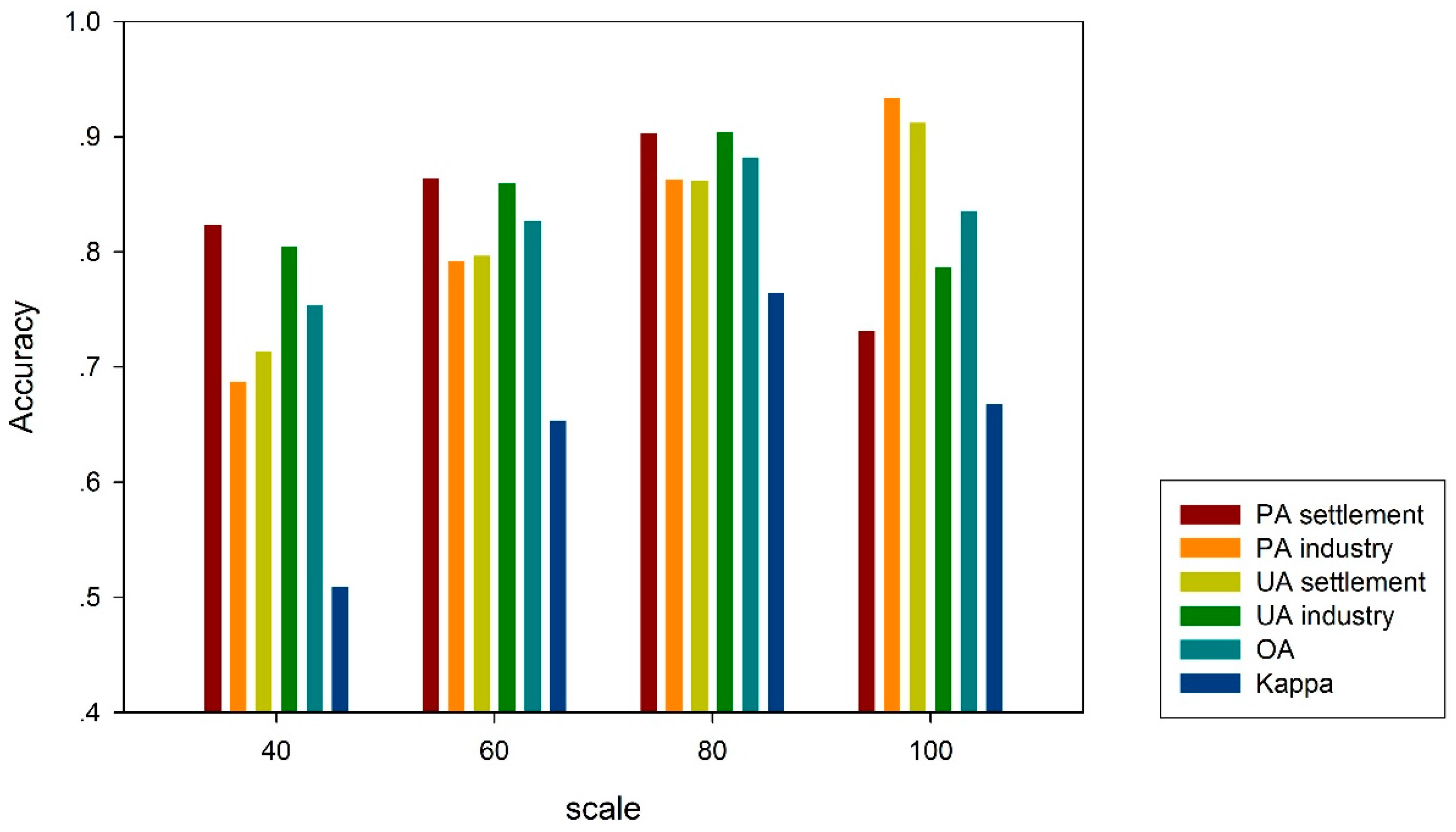
4.2. Landscape Unit Scale Analysis
4.3. Accuracy Comparison of Three Methods
5. Discussion
5.1. Landscape Unit and Landscape Metrics
5.2. Landscape Unit Scale Effect
5.3. Lacunarity Algorithm and Limitation
5.4. Classification Framework Portability
5.5. Potential Applications
6. Conclusions
Supplementary Materials
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Hansen, M.C.; DeFries, R.S.; Townshend, J.R.; Sohlberg, R. Global land cover classification at 1 km spatial resolution using a classification tree approach. Int. J. Remote Sens. 2000, 21, 1331–1364. [Google Scholar] [CrossRef]
- Jensen, J.R. Digital Change Detection. In Introductory Digital Image Processing: A Remote Sensing Perspective, 3rd ed.; University of South Carolina: Columbus, OH, USA, 1986; pp. 337–339. [Google Scholar]
- Owen, K.K.; Wong, D.W. Exploring structural differences between rural and urban informal settlements from imagery: The basureros of Cobán. Geocarto Int. 2013, 28, 562–581. [Google Scholar] [CrossRef]
- Tuia, D.; Ratle, F.; Pacifici, F.; Kanevski, M.F.; Emery, W.J. Active learning methods for remote sensing image classification. IEEE Trans. Geosci. Remote Sens. 2009, 47, 2218–2232. [Google Scholar] [CrossRef]
- Hussain, M.; Chen, D.; Cheng, A.; Wei, H.; Stanley, D. Change detection from remotely sensed images: From pixel-based to object-based approaches. ISPRS J. Photogramm. 2013, 80, 91–106. [Google Scholar] [CrossRef]
- Nagendra, H.; Lucas, R.; Honrado, J.P.; Jongman, R.H.G.; Tarantino, C.; Adamo, M.; Mairota, P. Remote sensing for conservation monitoring: Assessing protected areas, habitat extent, habitat condition, species diversity, and threats. Ecol. Indic. 2013, 33, 45–59. [Google Scholar] [CrossRef]
- Kuffer, M.; Barrosb, J. Urban morphology of unplanned settlements: The use of spatial metrics in VHR remotely sensed images. Procedia Environ. Sci. 2011, 7, 152–157. [Google Scholar] [CrossRef]
- Li, X.; Chen, W.; Cheng, X.; Wang, L. A comparison of machine learning algorithms for mapping of complex surface-mined and agricultural landscapes using ZiYuan-3 stereo satellite imagery. Remote Sens. 2016, 8, 514. [Google Scholar] [CrossRef]
- Blaschke, T. Object based image analysis for remote sensing. ISPRS J. Photogramm. Remote Sen. 2010, 65, 2–16. [Google Scholar] [CrossRef]
- Nussbaum, S.; Menz, G. Satellite Imagery and Methods of Remote Sensing. In Object-Based Image Analysis and Treaty Verification: New Approaches in Remote Sensing-Applied to Nuclear Facilities in Iran; Springer Science & Business Media: Berlin, Germany, 2008; pp. 17–27. [Google Scholar]
- Su, W.; Li, J.; Chen, Y.; Liu, Z.; Zhang, J.; Low, T.M.; Suppiah, I.; Hashim, S.A.M. Textural and local spatial statistics for the object-oriented classification of urban areas using high resolution imagery. Int. J. Remote Sens. 2008, 29, 3105–3117. [Google Scholar] [CrossRef]
- Pacifici, F.; Chini, M.; Emery, W.J. A neural network approach using multi-scale textural metrics from very high-resolution panchromatic imagery for urban land-use classification. Remote Sens. Environ. 2009, 113, 1276–1292. [Google Scholar] [CrossRef]
- Zhang, R.; Zhu, D. Study of land cover classification based on knowledge rules using high-resolution remote sensing images. Expert Syst. Appl. 2011, 38, 3647–3652. [Google Scholar] [CrossRef]
- Han, N.; Du, H.; Zhou, G.; Sun, X.; Ge, H.; Xu, X. Object-based classification using SPOT-5 imagery for Moso bamboo forest mapping. Int. J. Remote Sens. 2014, 35, 1126–1142. [Google Scholar] [CrossRef]
- Niebergall, S.; Loew, A.; Mauser, W. Integrative assessment of informal settlements using VHR remote sensing data—The Delhi case study. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2008, 1, 193–205. [Google Scholar] [CrossRef]
- Kuffer, M.; Barros, J.; Sliuzas, R.V. The development of a morphological unplanned settlement index using very-high-resolution (VHR) imagery. Comput. Environ. Urban Syst. 2014, 48, 138–152. [Google Scholar] [CrossRef]
- Chen, G.; Liang, S.; Chen, J. The extraction of plantation with texture feature in high resolution remote sensing image. In Proceedings of the 3rd International Workshop on Earth Observation and Remote Sensing Applications, Changsha, China, 11–14 June 2014; pp. 384–387.
- Han, N.; Du, H.; Zhou, G.; Xu, X.; Ge, H.; Liu, L.; Gao, G.; Sun, S. Exploring the synergistic use of multi-scale image object metrics for land-use/land-cover mapping using an object-based approach. Int. J. Remote Sens. 2015, 36, 3544–3562. [Google Scholar] [CrossRef]
- Han, N.; Wang, K.; Yu, L.; Zhang, X. Integration of texture and landscape features into object-based classification for delineating Torreya using IKONOS imagery. Int. J. Remote Sens. 2012, 33, 2003–2033. [Google Scholar] [CrossRef]
- Kit, O.; Lüdeke, M.; Reckien, D. Texture-based identification of urban slums in Hyderabad, India using remote sensing data. Appl. Geogr. 2012, 32, 660–667. [Google Scholar] [CrossRef]
- Ma, L. Discrimination of residential and industrial buildings using LiDAR data and an effective spatial-neighbor algorithm in a typical urban industrial park. Eur. J. Remote Sens. 2015, 48, 1–15. [Google Scholar] [CrossRef]
- Fan, C.; Myint, S. A comparison of spatial autocorrelation indices and landscape metrics in measuring urban landscape fragmentation. Landsc. Urban Plan 2014, 121, 117–128. [Google Scholar] [CrossRef]
- McGarigal, K.; Cushman, S.A.; Neel, M.C.; Ene, E. FRAGSTATS: Spatial Pattern Analysis Program for Categorical Maps. Available online: http://www.umass.edu/landeco/research/fragstats/fragstats.html (accessed on 10 May 2016).
- Turner, M.G.; Gardner, R.H.; O’Neill, R.V. Landscape Ecology in Theory and Practice; Springer: New York, NY, USA, 2015; pp. 479–494. [Google Scholar]
- Jaeger, J.A.G. Landscape division, splitting index, and effective mesh size: New measures of landscape fragmentation. Landsc. Ecol. 2000, 15, 115–130. [Google Scholar] [CrossRef]
- Statistics Bureau of Tongxiang. Tongxiang Statistical Year Books; China Statistical Press: Beijing, China, 2012. [Google Scholar]
- Blaschke, T.; Hay, G.J.; Kelly, M.; Lang, S.; Hofmann, P.; Addink, E.; Feitosa, R.Q.; van der Meer, F.; van der Werff, H.; van Coillie, F.; et al. Geographic object-based image analysis—Towards a new paradigm. ISPRS J. Photogramm. 2014, 87, 180–191. [Google Scholar] [CrossRef] [PubMed]
- Yu, Q.; Gong, P.; Clinton, N.; Biging, G.; Kelly, M.; Schirokauer, D. Object-based detailed vegetation classification with airborne high spatial resolution remote sensing imagery. Photogramm. Eng. Remote Sens. 2006, 72, 799–811. [Google Scholar] [CrossRef]
- Bhaskaran, S.; Paramananda, S.; Ramnarayan, M. Per-pixel and object-oriented classification methods for mapping urban features using IKONOS satellite data. Appl. Geogr. 2010, 30, 650–665. [Google Scholar] [CrossRef]
- Baatz, M.; Schäpe, A. Multiresolution segmentation: An optimization approach for high quality multi-scale image segmentation. Angew. Geogr. Inf. Verarb. 2000, 58, 12–23. [Google Scholar]
- Benz, U.C.; Hofmann, P.; Willhauck, G.; Lingenfelder, I.; Heynen, M. Multi-resolution, object-oriented fuzzy analysis of remote sensing data for GIS-ready information. ISPRS J. Photogramm. Remote Sen. 2004, 58, 239–258. [Google Scholar] [CrossRef]
- Drăguţ, L.; Csillik, O.; Eisank, C.; Tiede, D. Automated parameterisation for multi-scale image segmentation on multiple layers. ISPRS J. Photogramm. Remote Sen. 2014, 88, 119–127. [Google Scholar] [CrossRef] [PubMed]
- Drǎguţ, L.; Tiede, D.; Levick, S.R. ESP: A tool to estimate scale parameter for multiresolution image segmentation of remotely sensed data. Int. J. Geogr. Inf. Sci. 2010, 24, 859–871. [Google Scholar] [CrossRef]
- Hellesen, T.; Matikainen, L. An Object-based approach for mapping shrub and tree cover on grassland habitats by use of LiDAR and CIR orthoimages. Remote Sens. 2013, 5, 558–583. [Google Scholar] [CrossRef]
- Belgiu, M.; Drǎguţ, L. Comparing supervised and unsupervised multiresolution segmentation approaches for extracting buildings from very high resolution imagery. ISPRS J. Photogramm. Remote Sen. 2014, 96, 67–75. [Google Scholar] [CrossRef] [PubMed]
- Mountrakis, G.; Im, J.; Ogole, C. Support vector machines in remote sensing: A review. ISPRS J. Photogramm. 2011, 66, 247–259. [Google Scholar] [CrossRef]
- Heumann, B.W. An object-based classification of mangroves using a hybrid decision tree—Support vector machine approach. Remote Sens. 2011, 3, 2440–2460. [Google Scholar] [CrossRef]
- Nussbaum, S.; Niemeyer, I.; Canty, M.J. SEATH—A new tool for automated feature extraction in the context of object-based image analysis. In Proceedings of the 1st International Conference on Object-Based Image Analysis, Salzburg, Austria, 4–5 July 2006.
- Gao, Y.; Marpu, P.; Niemeyer, I.; Runfola, D.M.; Giner, N.M.; Hamill, T.; Pontius, R.G. Object-based classification with features extracted by a semi-automatic feature extraction algorithm—SEaTH. Geocarto Int. 2011, 26, 211–226. [Google Scholar] [CrossRef]
- Fan, R.; Chen, P.; Lin, C. Working set selection using second order information for training support vector machines. J. Mach. Learn. Res. 2005, 6, 1889–1918. [Google Scholar]
- Zhang, Z.; Su, S.; Xiao, R.; Jiang, D.; Wu, J. Identifying determinants of urban growth from a multi-scale perspective: A case study of the urban agglomeration around Hangzhou Bay, China. Appl. Geogr. 2013, 45, 193–202. [Google Scholar] [CrossRef]
- Su, S.; Xiao, R.; Zhang, Y. Multi-scale analysis of spatially varying relationships between agricultural landscape patterns and urbanization using geographically weighted regression. Appl. Geogr. 2012, 32, 360–375. [Google Scholar] [CrossRef]
- Malhi, Y.; Román-Cuesta, R.M. Analysis of lacunarity and scales of spatial homogeneity in IKONOS images of Amazonian tropical forest canopies. Remote Sens. Environ. 2008, 112, 2074–2087. [Google Scholar] [CrossRef]
- Dong, P. Test of a new lacunarity estimation method for image texture analysis. Int. J. Remote Sens. 2000, 21, 3369–3373. [Google Scholar] [CrossRef]
- Dong, P. Lacunarity analysis of raster datasets and 1D, 2D, and 3D point patterns. Comput. Geosci. 2009, 35, 2100–2110. [Google Scholar] [CrossRef]
- Congalton, R.G. A review of assessing the accuracy of classifications of remotely sensed data. Remote Sens. Environ. 1991, 37, 35–46. [Google Scholar] [CrossRef]
- Thapa, R.B.; Murayama, Y. Urban mapping, accuracy, & image classification: A comparison of multiple approaches in Tsukuba City, Japan. Appl. Geogr. 2009, 29, 135–144. [Google Scholar] [Green Version]
- Foody, G.M. Thematic map comparison: Evaluating the statistical significance of differences in classification accuracy. Photogramm. Eng. Remote Sens. 2004, 70, 627–633. [Google Scholar] [CrossRef]
- Weng, Q. Remote sensing of impervious surfaces in the urban areas: Requirements, methods, and trends. Remote Sens. Environ. 2012, 117, 34–49. [Google Scholar] [CrossRef]
- Sawaya, K. Extending satellite remote sensing to local scales: Land and water resource monitoring using high-resolution imagery. Remote Sens. Environ. 2003, 88, 144–156. [Google Scholar] [CrossRef]
- Moser, B.; Jaeger, J.A.G.; Tappeiner, U.; Tasser, E.; Eiselt, B. Modification of the effective mesh size for measuring landscape fragmentation to solve the boundary problem. Landsc. Ecol. 2007, 22, 447–459. [Google Scholar] [CrossRef]
- Girvetz, E.H.; Thorne, J.H.; Berry, A.M.; Jaeger, J.A.G. Integration of landscape fragmentation analysis into regional planning: A statewide multi-scale case study from California, USA. Landsc. Urban Plan 2008, 86, 205–218. [Google Scholar] [CrossRef]
- Lausch, A.; Salbach, C.; Schmidt, A.; Doktor, D.; Merbach, I.; Pause, M. Deriving phenology of barley with imaging hyperspectral remote sensing. Ecol. Model. 2015, 295, 123–135. [Google Scholar] [CrossRef]
- Chang, C.; Lin, C. LIBSVM: A library for support vector machines. Acm Trans. Intell. Syst. Technol. 2011, 2, 1–27. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Classification Stage | Object Features | Description |
|---|---|---|
| Mapping land-use and land-cover in Stage 1 | Mean brightness Mean layer 1 to 4 | Mean values of brightness and all image bands |
| Stdev layer 1 to 4 | Standard deviation for each object in all bands | |
| NDVI | Mean values for each object in Normalized Difference Vegetation Index | |
| GLCM_homogeneity, GLCM_contrast, GLCM_dissimilarity, GLCM_entropy, GLCM_Ang.2nd moment, GLCM_mean, GLCM_standard deviation, GLCM_correlation | Eight grey-level co-occurrence matrix (GLCM) texture measures calculated for each object, from each image layer values | |
| Top-down hierarchical classification | Except object features in Stage 1, add: Area, length, width, length/width, asymmetry, border index, compactness, density, roundness, shape index | Extent and shape attributes of each object |
| Lacunarity based hierarchical classification | Except object features in Stage 1, add lacunarity images window size: 35 3 × 3, 5 × 5, 7 × 7, 9 × 9 | Lacunarity analyze result from binary image with moving-window size of 35 pixel, and gliding-box size of 3 × 3, 5 × 5, 7 × 7, 9 × 9 |
| Landscape metrics and chessboard segmentation method | PLAND_asphalt, PLAND_concrete, PLAND_farmland, PLAND_clay rooftops, PLAND_metal rooftops, PLAND_trees and shrubs, PLAND_bare soil, PLAND_water, NP, TE, LSI, SHDI | Percentage of Landscape (PLAND) of each LULC type in each square and Number of Patches (NP), Total Edge (TE), Landscape Shape Index (LSI) and Shannon’s Diversity Index (SHDI) in landscape metrics |
| Reference Class | ||||||||
|---|---|---|---|---|---|---|---|---|
| Concrete | Metal Rooftops | Clay Rooftops | Farmland | Trees and Shrubs | Bare Soil | Sum | ||
| Predicted class | concrete | 112 | 2 | 1 | 1 | 4 | 19 | 139 |
| metal rooftops | 2 | 99 | 0 | 0 | 1 | 0 | 102 | |
| clay rooftops | 4 | 4 | 256 | 3 | 26 | 3 | 296 | |
| farmland | 0 | 1 | 0 | 109 | 1 | 8 | 119 | |
| trees and shrubs | 0 | 0 | 0 | 10 | 183 | 3 | 196 | |
| bare soil | 11 | 0 | 0 | 0 | 0 | 93 | 104 | |
| Sum | 129 | 106 | 257 | 123 | 215 | 126 | ||
| PA | 86.82% | 93.40% | 99.61% | 88.62% | 85.12% | 73.81% | ||
| UA | 80.58% | 97.06% | 86.49% | 91.60% | 93.37% | 89.42% | ||
| Kappa Per Class | 85% | 93% | 99% | 87% | 81% | 71% | ||
| OA | 89.12% | |||||||
| Overall Kappa | 87% | |||||||
| Scale 40 m | Reference Class | Scale 60 m | Reference Class | |||||
| Settlement | Industry | Sum | Settlement | Industry | Sum | |||
| Predicted class | Settlement | 187 | 75 | 262 | Settlement | 196 | 50 | 246 |
| Industry | 40 | 165 | 205 | industry | 31 | 190 | 221 | |
| Sum | 227 | 240 | Sum | 227 | 240 | |||
| PA | 82.38% | 68.75% | PA | 86.34% | 79.17% | |||
| UA | 71.37% | 80.49% | UA | 79.67% | 85.97% | |||
| OA | 75.37% | OA | 82.66% | |||||
| Kappa | 51% | Kappa | 65% | |||||
| Scale 80 m | Reference Class | Scale 100 m | Reference Class | |||||
| Settlement | Industry | Sum | Settlement | Industry | Sum | |||
| Predicted class | settlement | 205 | 33 | 238 | settlement | 166 | 16 | 182 |
| industry | 22 | 207 | 229 | industry | 61 | 224 | 285 | |
| Sum | 227 | 240 | Sum | 227 | 240 | |||
| PA | 90.31% | 86.25% | PA | 73.13% | 93.33% | |||
| UA | 86.13% | 90.39% | UA | 91.21% | 78.60% | |||
| OA | 88.22% | OA | 83.51% | |||||
| Kappa | 76% | Kappa | 67% | |||||
| Hierarchy Network | Reference Class | Lacunarity Approach | Reference Class | |||||
|---|---|---|---|---|---|---|---|---|
| Settlement | Industry | Sum | Settlement | Industry | Sum | |||
| Predicted class | settlement | 163 | 54 | 217 | settlement | 164 | 52 | 216 |
| industry | 64 | 186 | 250 | industry | 63 | 188 | 251 | |
| Sum | 227 | 240 | Sum | 227 | 240 | |||
| PA | 71.81% | 77.50% | PA | 72.25% | 78.33% | |||
| UA | 75.12% | 74.40% | UA | 75.93% | 74.90% | |||
| OA | 74.73% | OA | 75.37% | |||||
| Kappa | 49% | Kappa | 51% | |||||
| Scales | Hierarchy Network | Lacunarity | |||||
|---|---|---|---|---|---|---|---|
| 40 m | 60 m | 80 m | 100 m | ||||
| Scales | 40 m | ||||||
| 60 m | 3.47 ** | ||||||
| 80 m | 5.88 ** | 3.06 ** | |||||
| 100 m | 3.1 ** | 0.37 | 2.37 * | ||||
| Hierarchy Network | 0.23 | 3.03 ** | 5.46 ** | 3.36 ** | |||
| Lacunarity | 0.08 | 2.81 ** | 5.35 ** | 3.21 ** | 0.65 | ||
| Classification Methods | Advantages | Limitations |
|---|---|---|
| Landscape metrics and chessboard segmentation method | Taking the differences in landscape properties between LULC types into consideration, successfully discriminated land-use types | Time consuming, still room for improvement |
| Top-down hierarchical classification | Easy to deploy | Causes confusion, spectral and textural information is not enough for classification heterogeneity due to the similarity between different LULC types. |
| Lacunarity based hierarchical classification | Suitable for discrimination of forest types and urban structure in aggregated form | Inappropriate in extraction of dispersed and disorderly target |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zheng, X.; Wang, Y.; Gan, M.; Zhang, J.; Teng, L.; Wang, K.; Shen, Z.; Zhang, L. Discrimination of Settlement and Industrial Area Using Landscape Metrics in Rural Region. Remote Sens. 2016, 8, 845. https://doi.org/10.3390/rs8100845
Zheng X, Wang Y, Gan M, Zhang J, Teng L, Wang K, Shen Z, Zhang L. Discrimination of Settlement and Industrial Area Using Landscape Metrics in Rural Region. Remote Sensing. 2016; 8(10):845. https://doi.org/10.3390/rs8100845
Chicago/Turabian StyleZheng, Xinyu, Yang Wang, Muye Gan, Jing Zhang, Longmei Teng, Ke Wang, Zhangquan Shen, and Ling Zhang. 2016. "Discrimination of Settlement and Industrial Area Using Landscape Metrics in Rural Region" Remote Sensing 8, no. 10: 845. https://doi.org/10.3390/rs8100845
APA StyleZheng, X., Wang, Y., Gan, M., Zhang, J., Teng, L., Wang, K., Shen, Z., & Zhang, L. (2016). Discrimination of Settlement and Industrial Area Using Landscape Metrics in Rural Region. Remote Sensing, 8(10), 845. https://doi.org/10.3390/rs8100845