
Using an Unmanned Aerial Vehicle-Based Digital Imaging System to Derive a 3D Point Cloud for Landslide Scarp Recognition

 ,
, 


Abstract
:
1. Introduction
2. Study Area
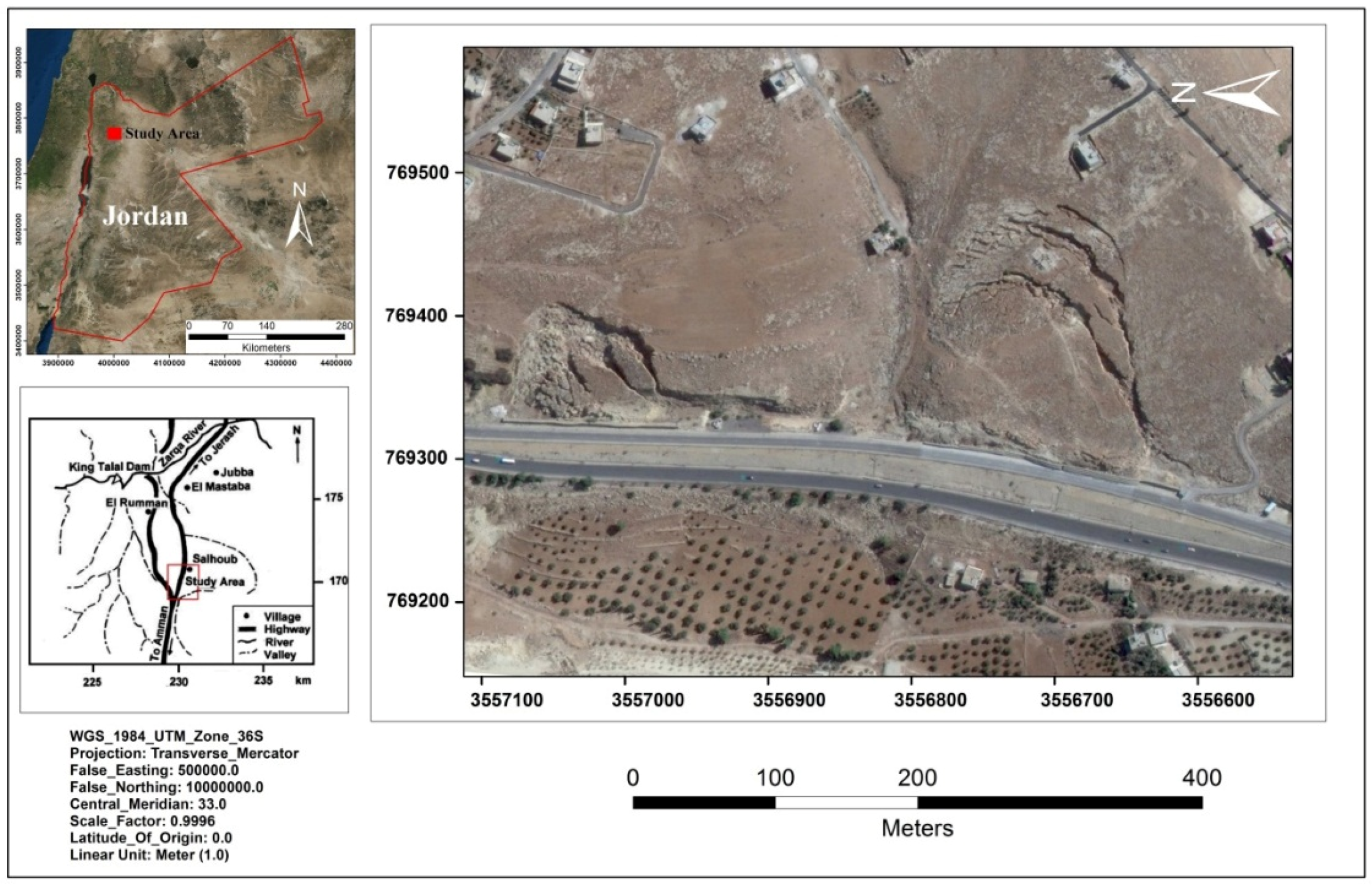
2.1. Location of the Study Area

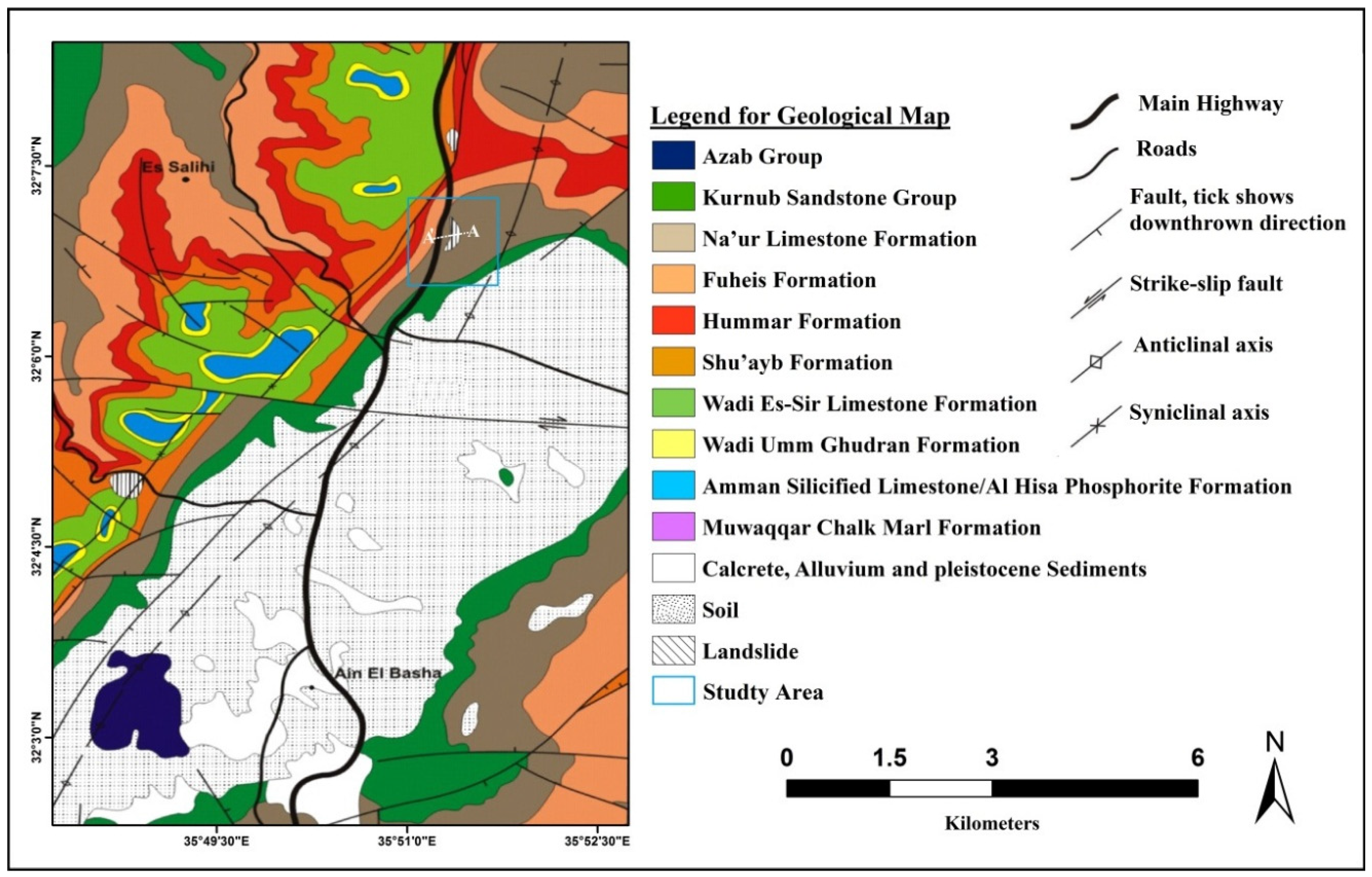
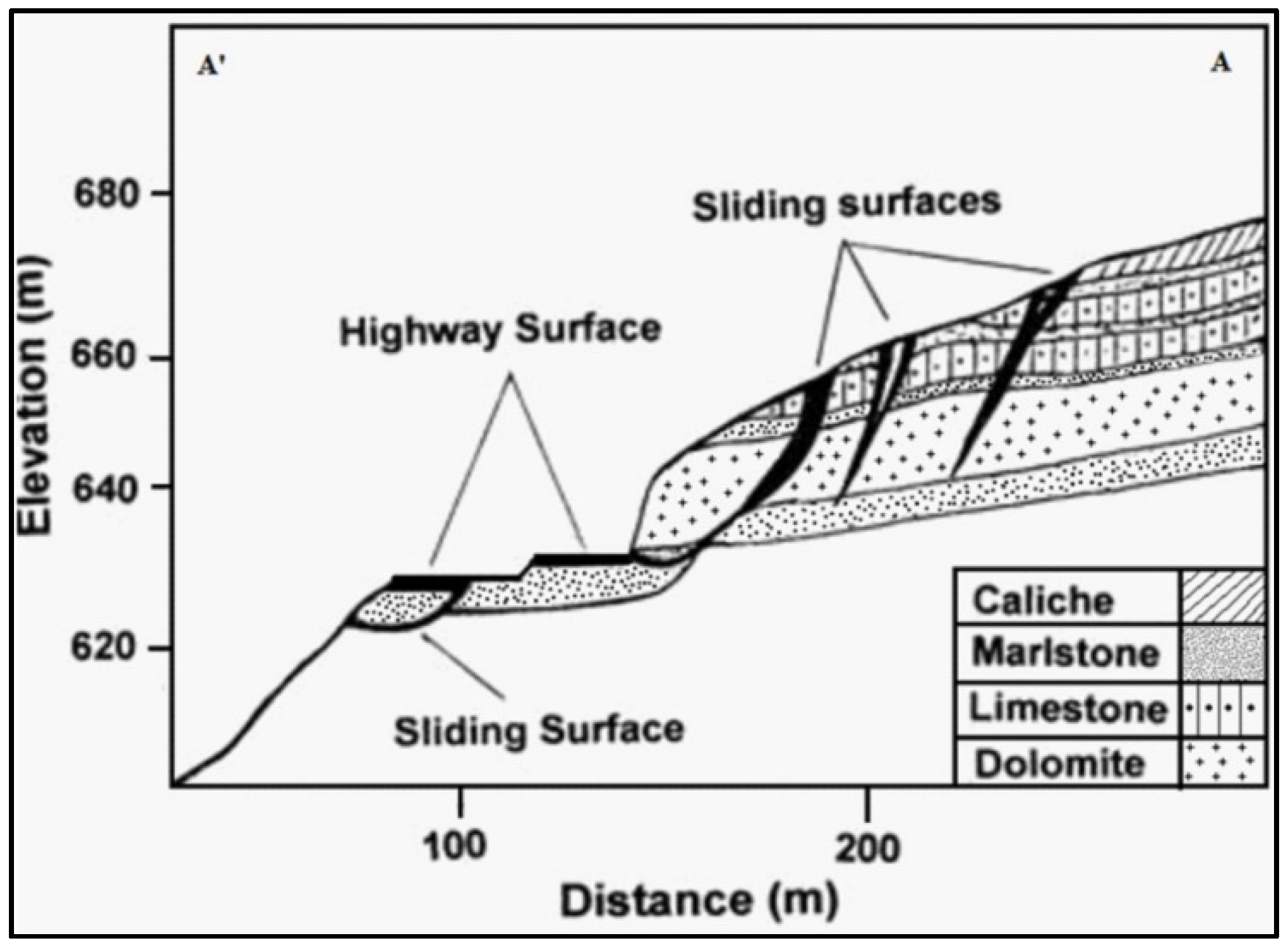
2.2. Geologic Setting of the Study Area


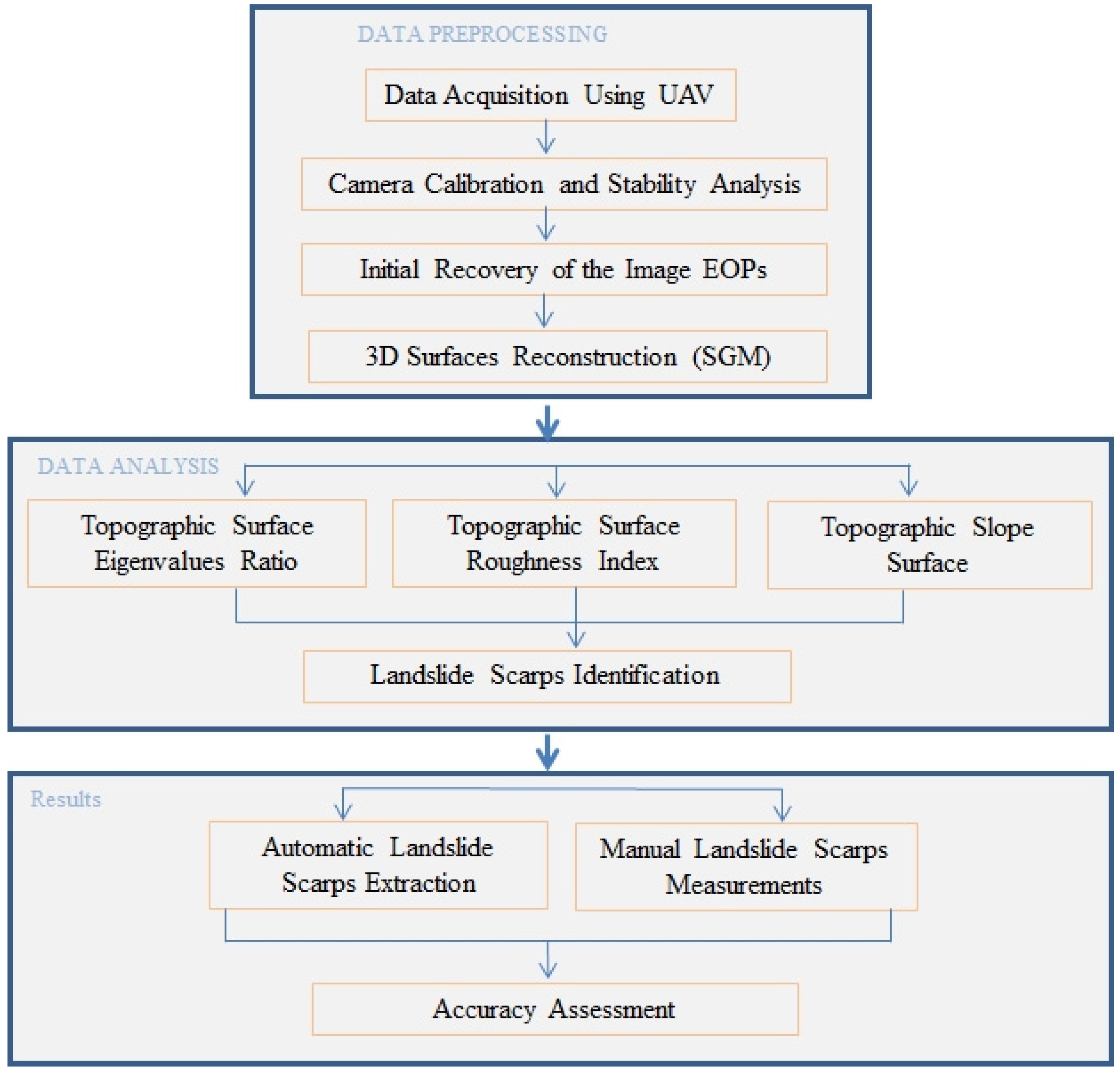
3. Methodology


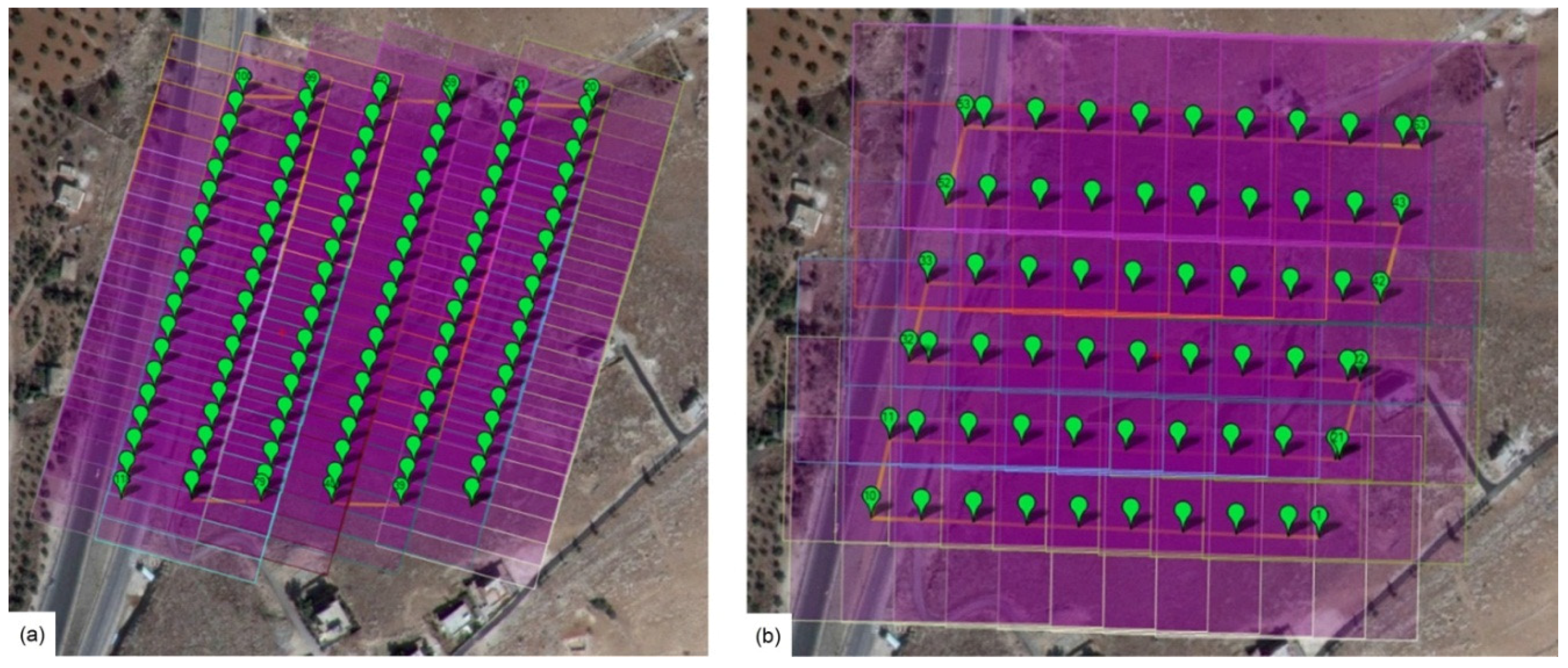
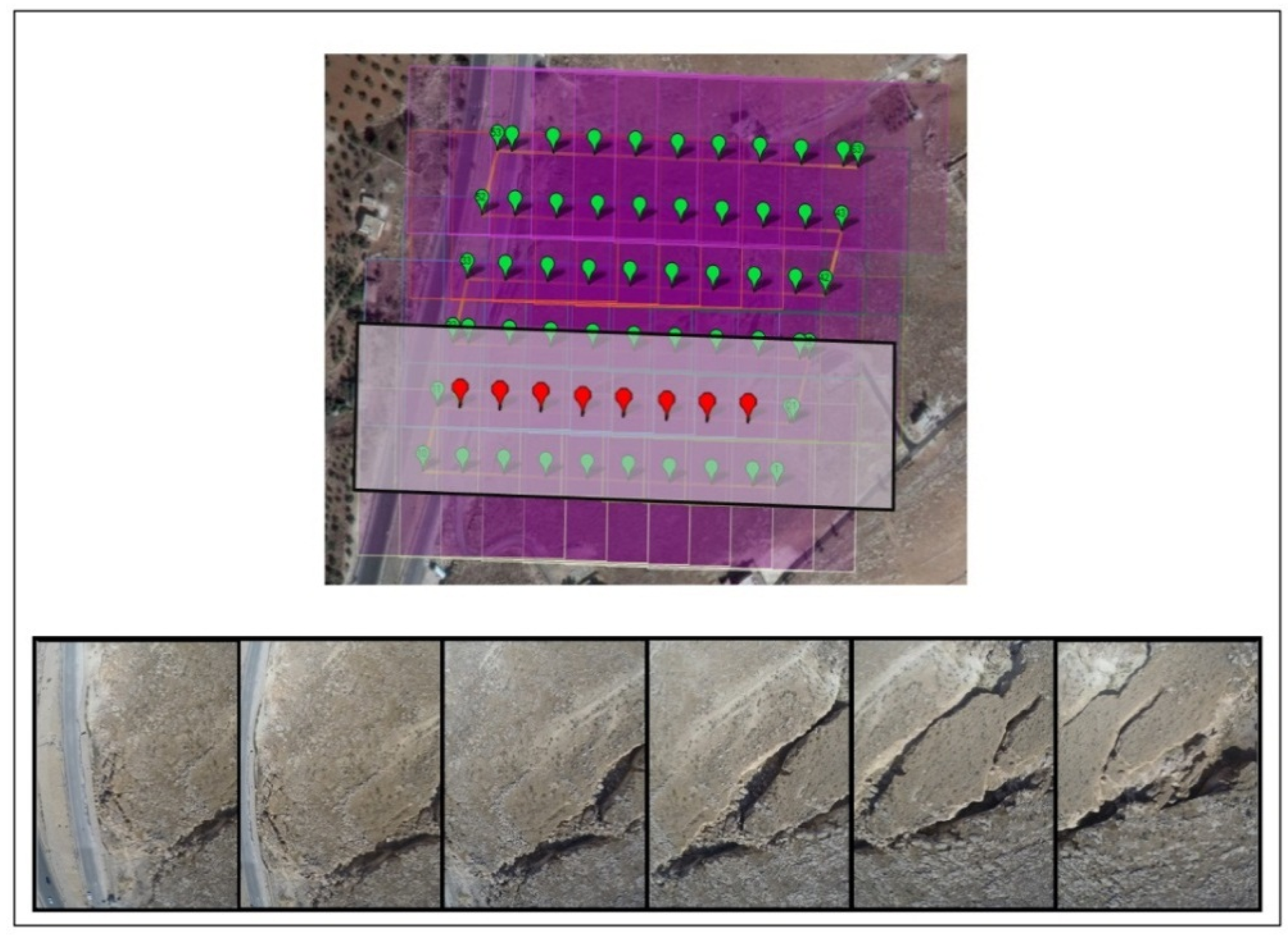
3.1. Mission Planning and Data Acquisition



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Flight Configuration | |
|---|---|
| Average flying height (AGL)/speed | 50 m/5 m/s |
| Autopilot | Available |
| Camera Specs | GoPro Hero3 + Black |
| Image format (pixels) | 3000 × 2250 |
| Pixel size | 1.55 µm |
| Focal length (nominal) | 3 mm |
| Time lapse | ~2 s |
| Image Block Specs | |
| GSD (nominal) | ~2.0 cm |
| Overlap/sidelap % | 80/60 |
| Image footprint | 83 m × 62 m |
| Distance between images | 14 m |
| Distance between lines | 39.8 m |
| Number of strips | 6 |
| Number of Images | 370 |
| Total Area Covered | |
| Study area | 48,981 m2 (12.73 min) |
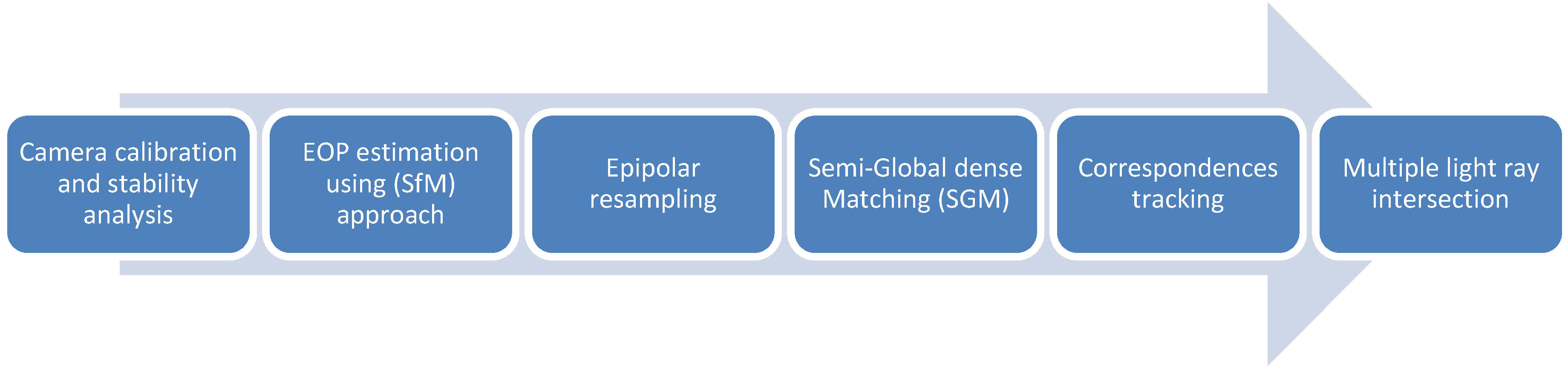
3.2. Automated Surface Reconstruction

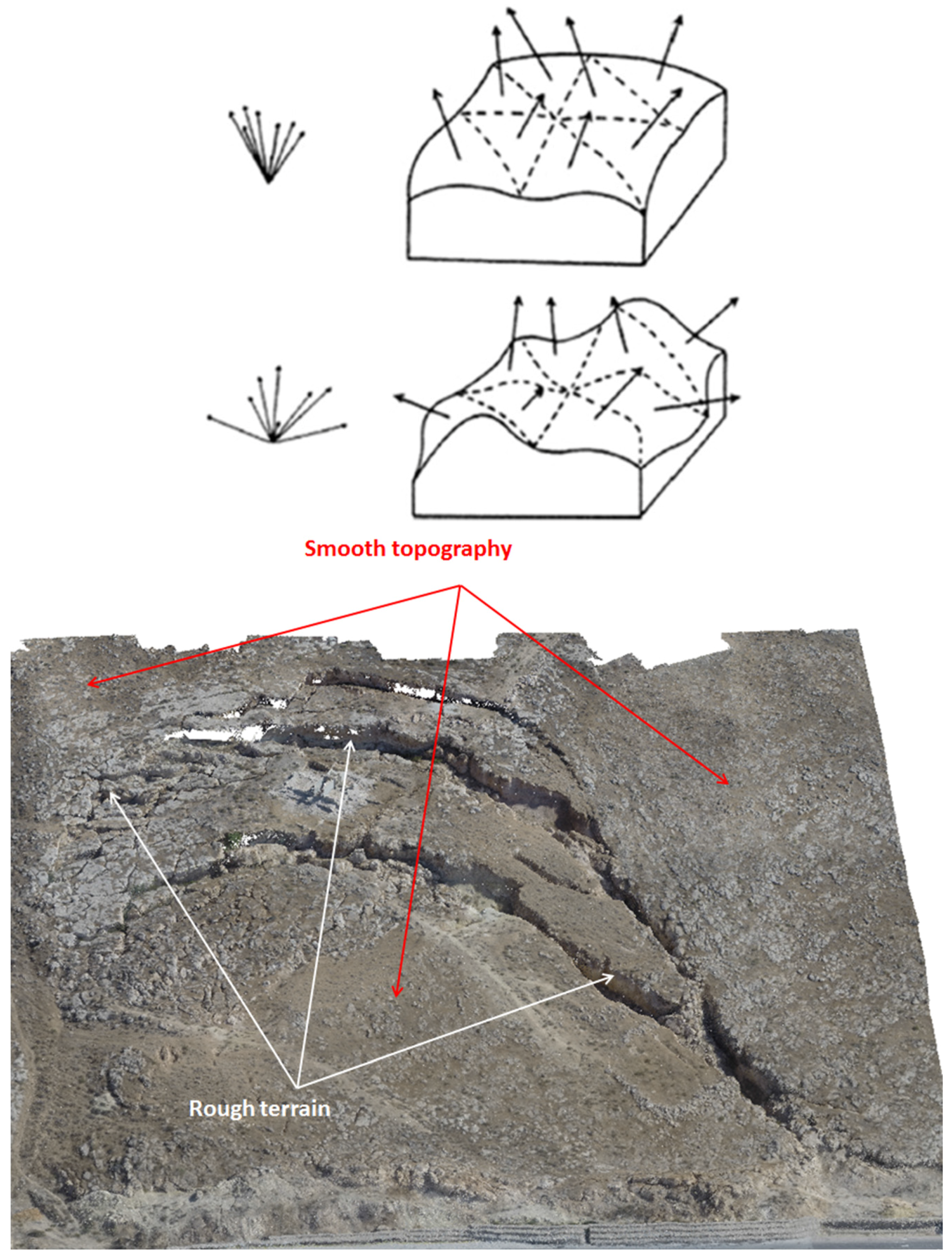
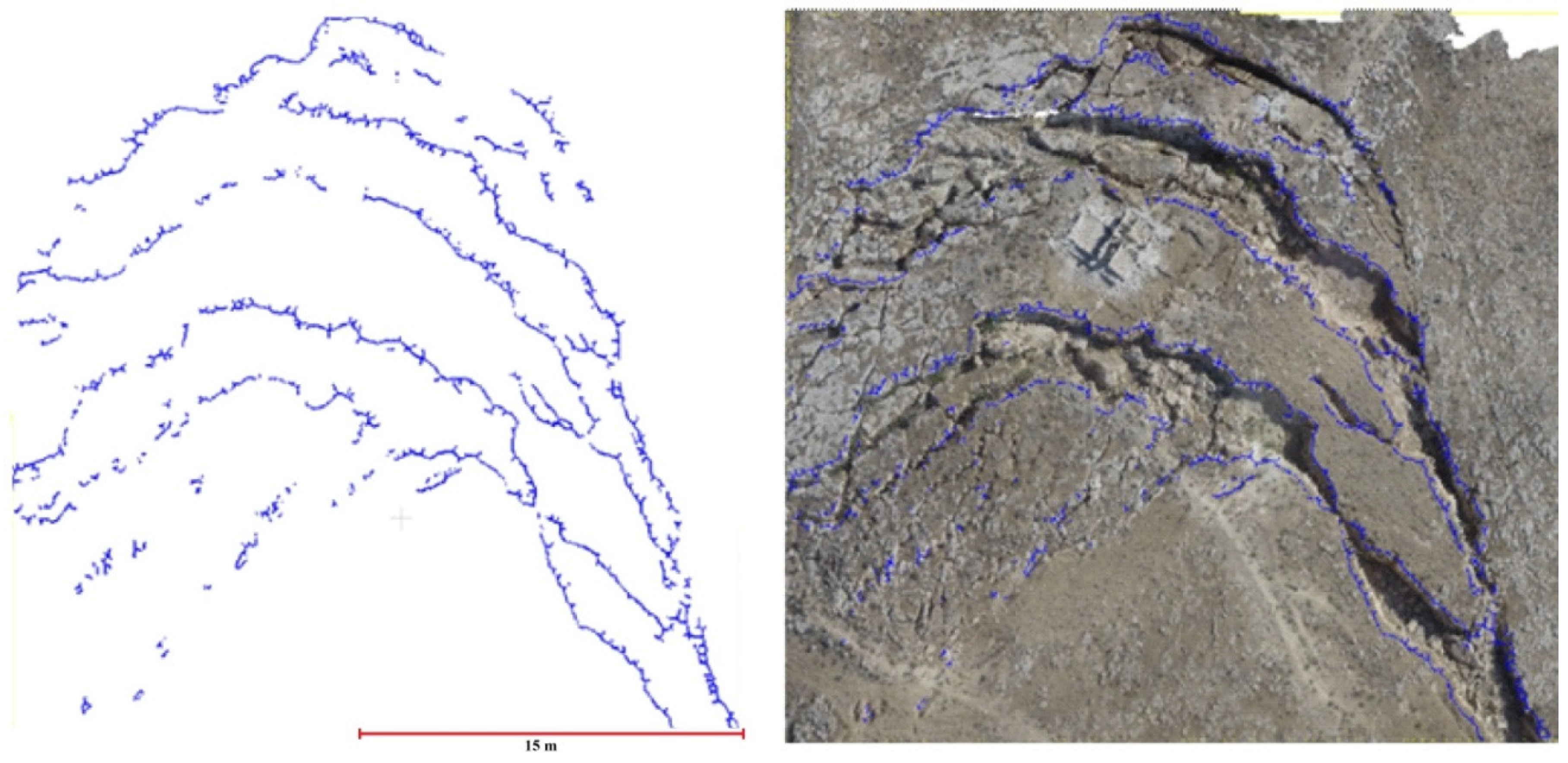
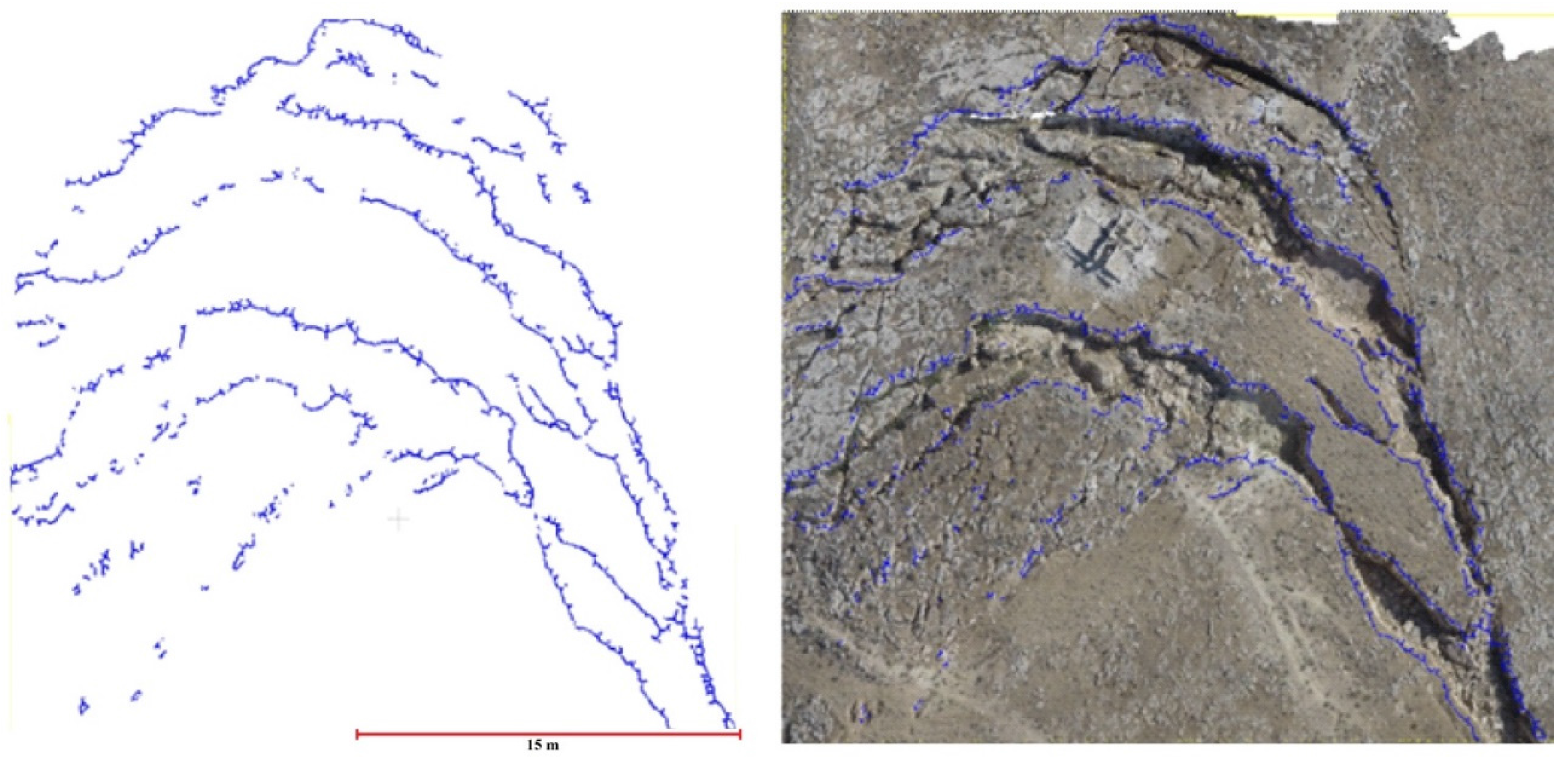
3.3. Automated Landslide Scarp Features Detection and Extraction
3.3.1. Eigenvalue Ratios
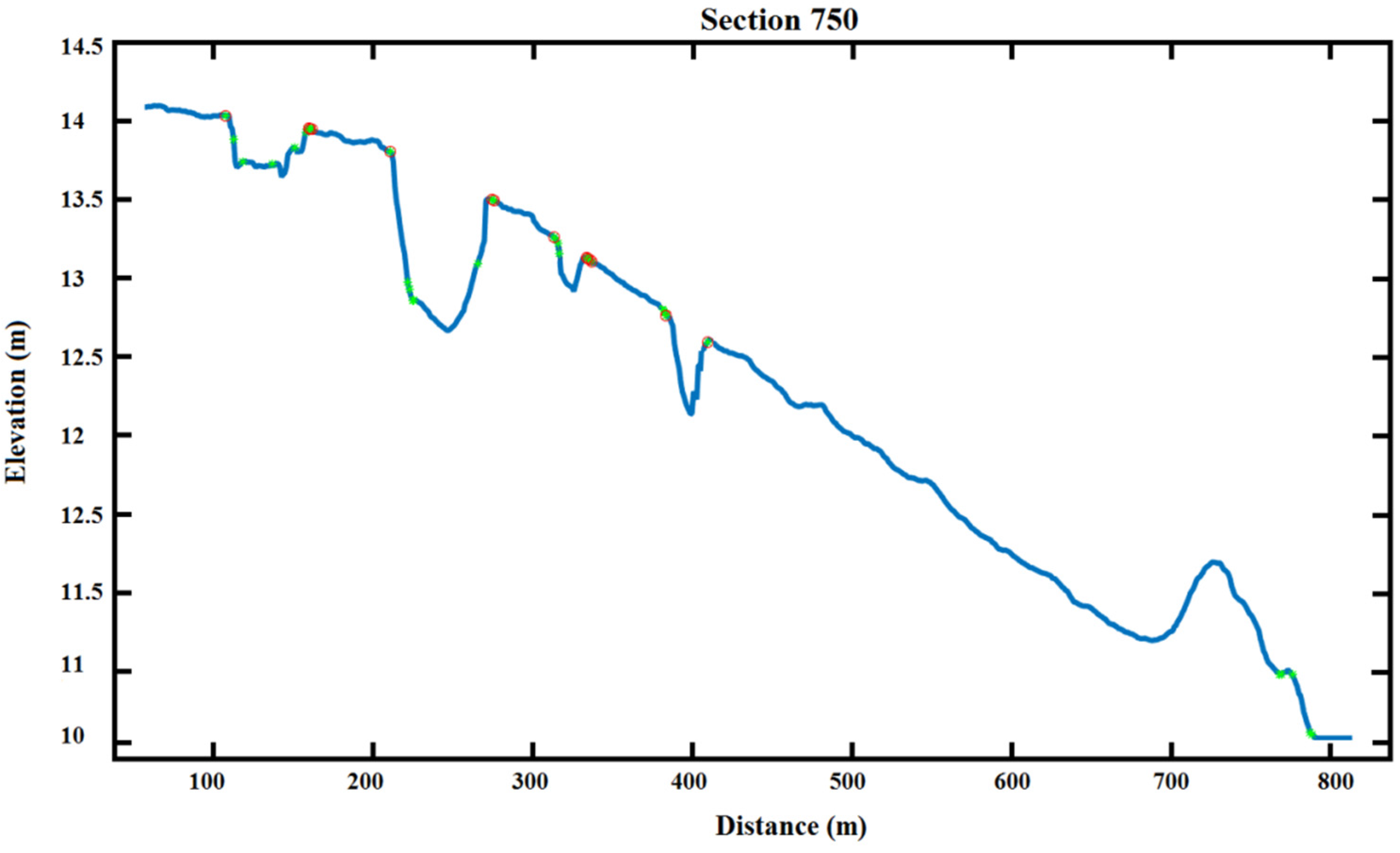
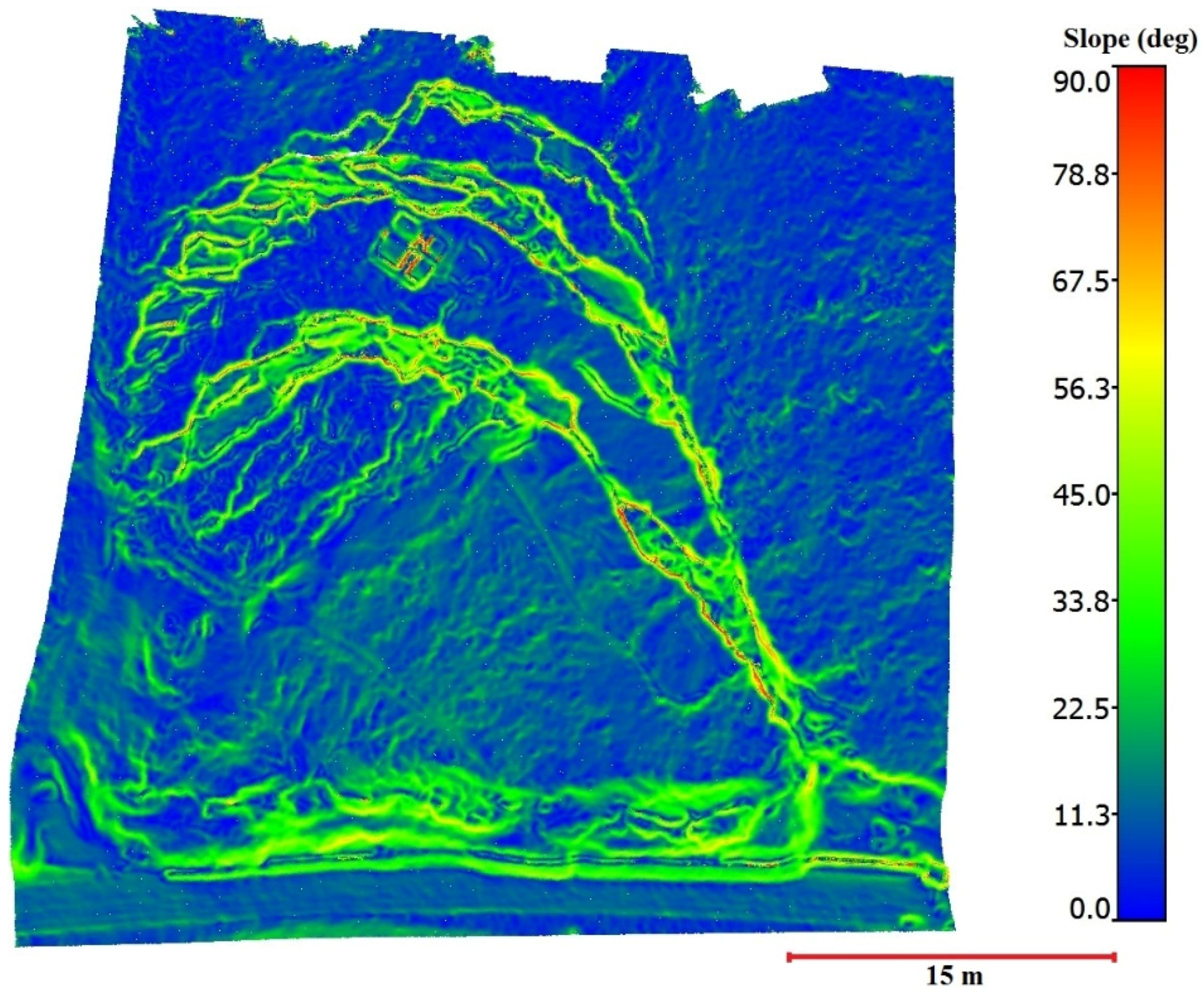
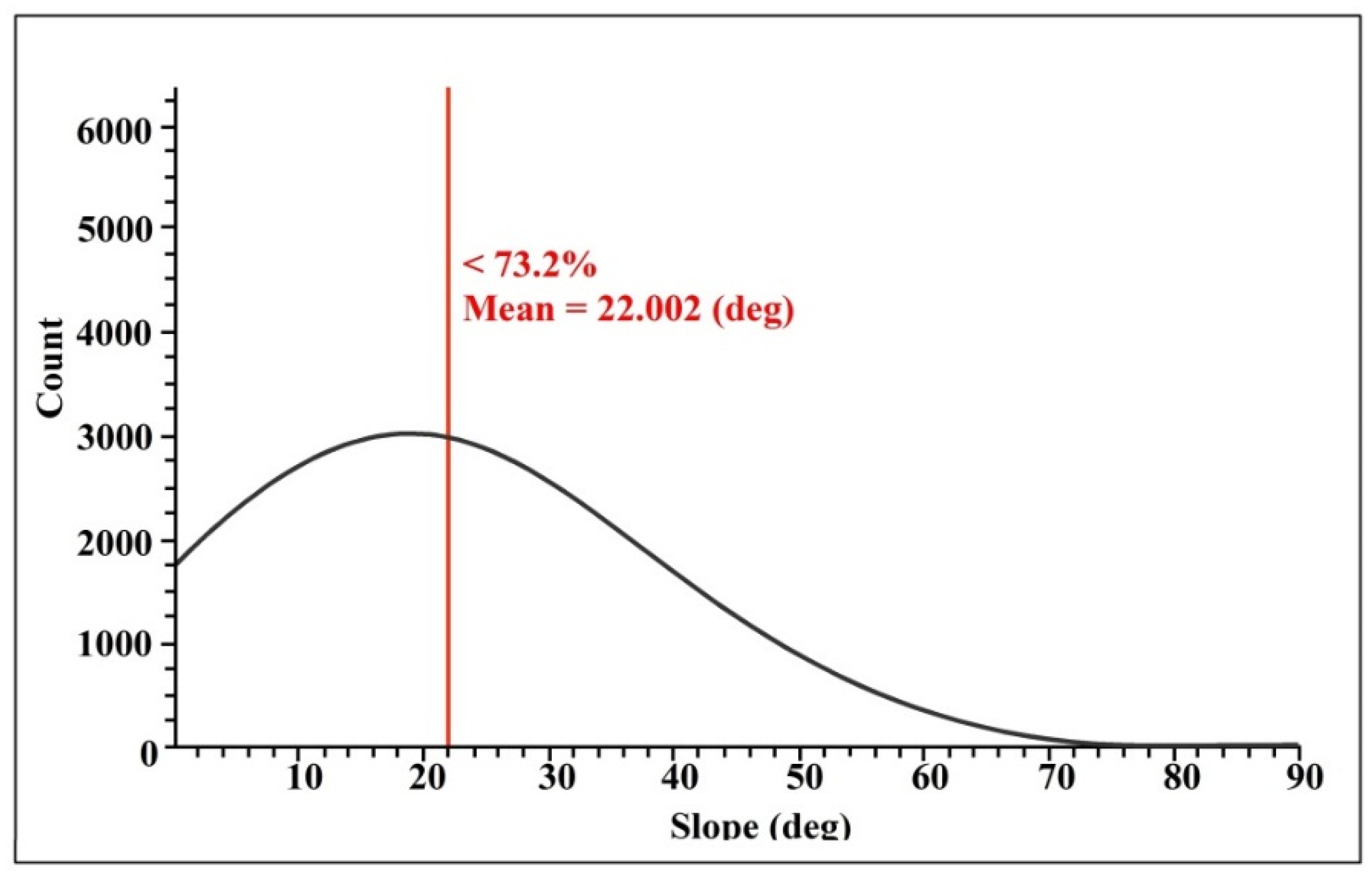
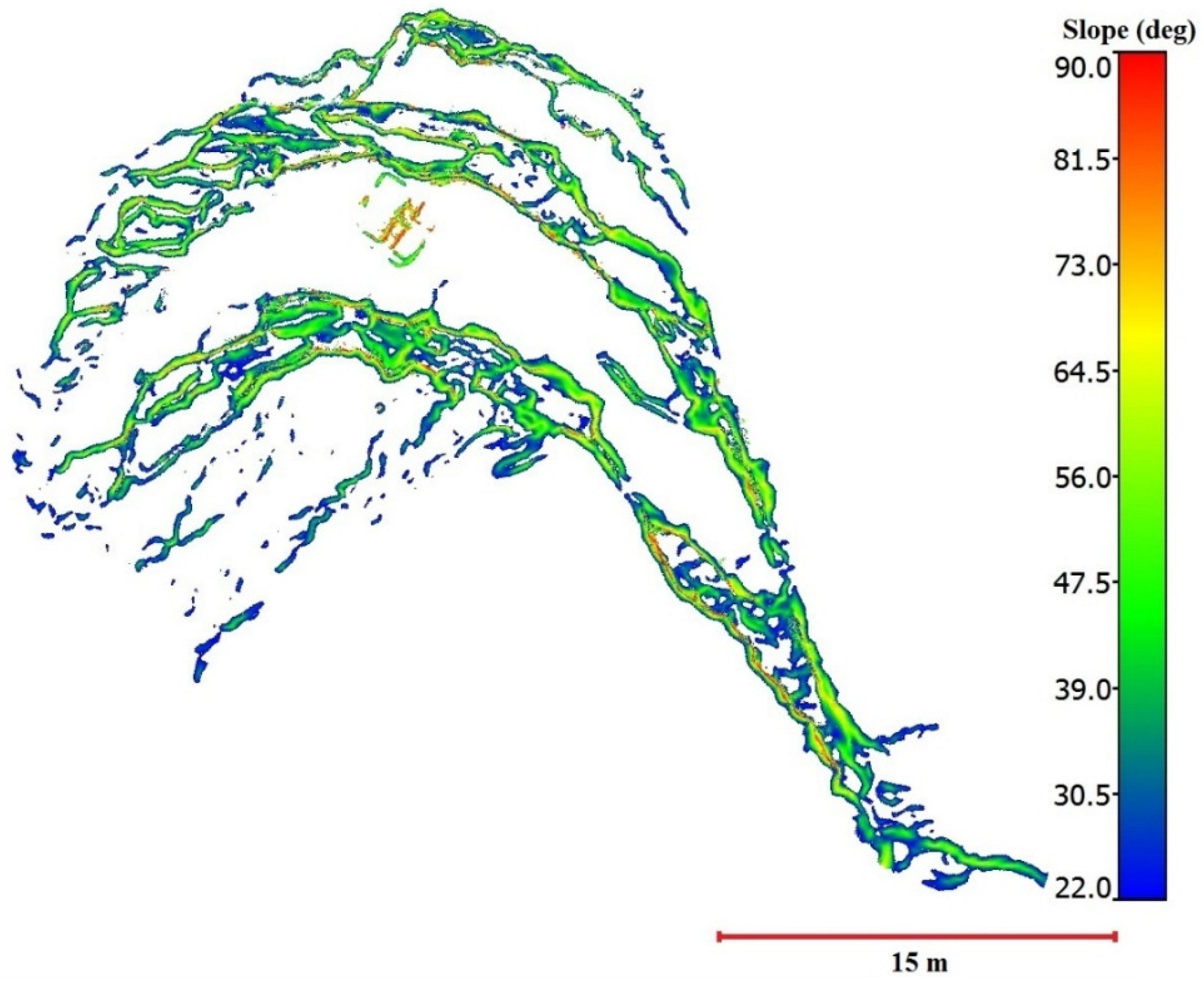
3.3.2. Slope
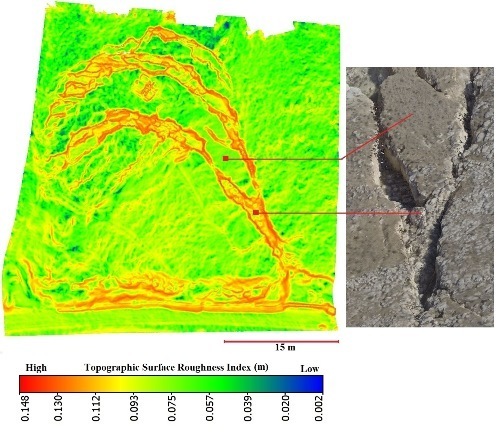
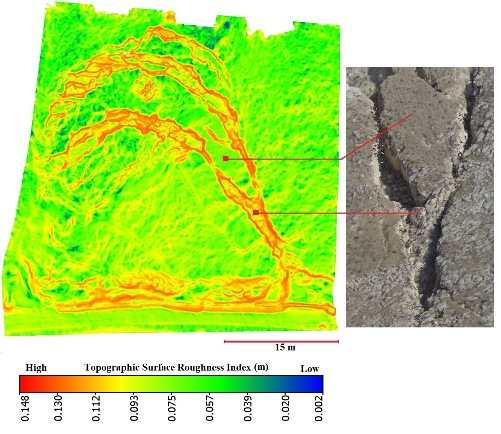
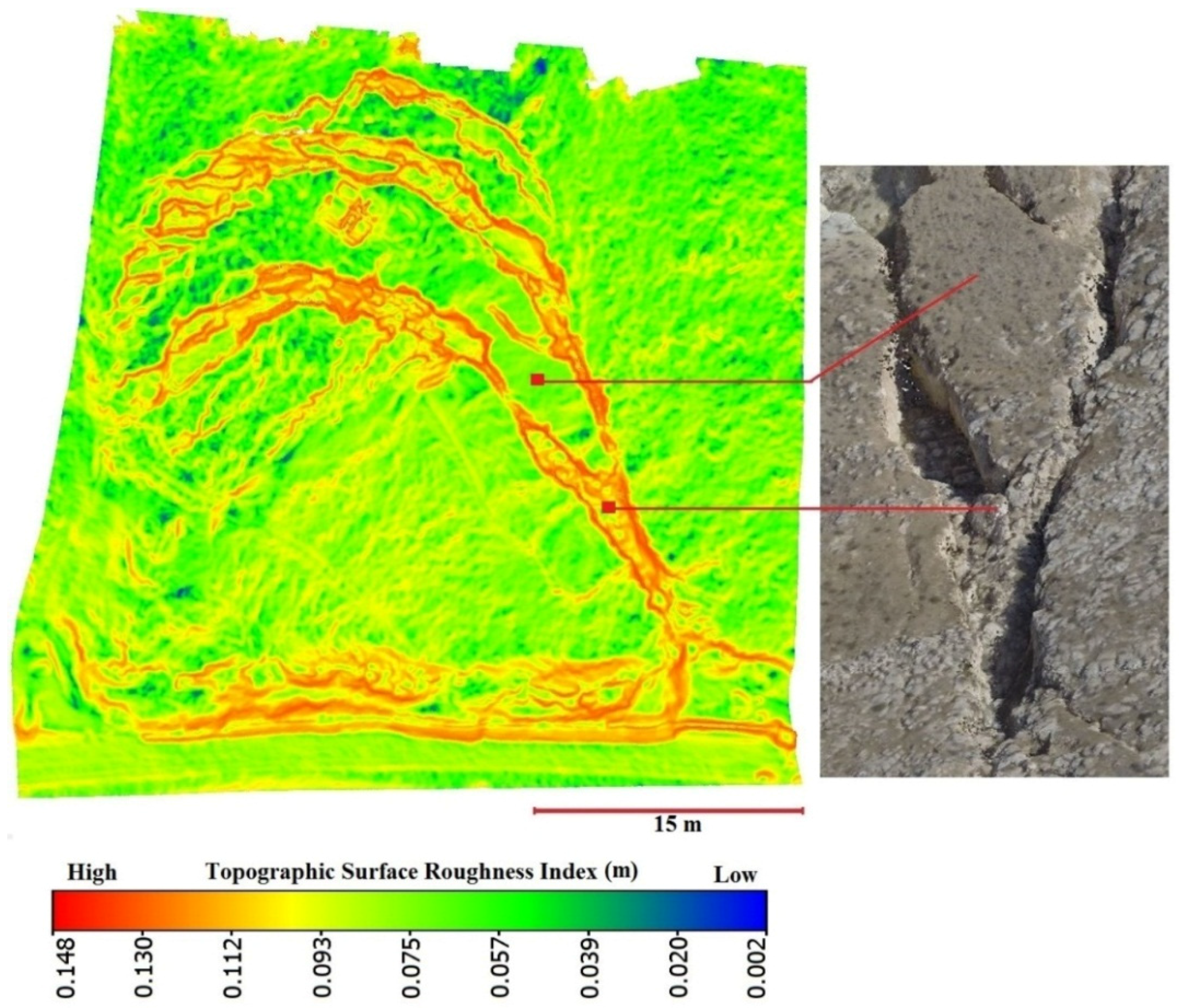
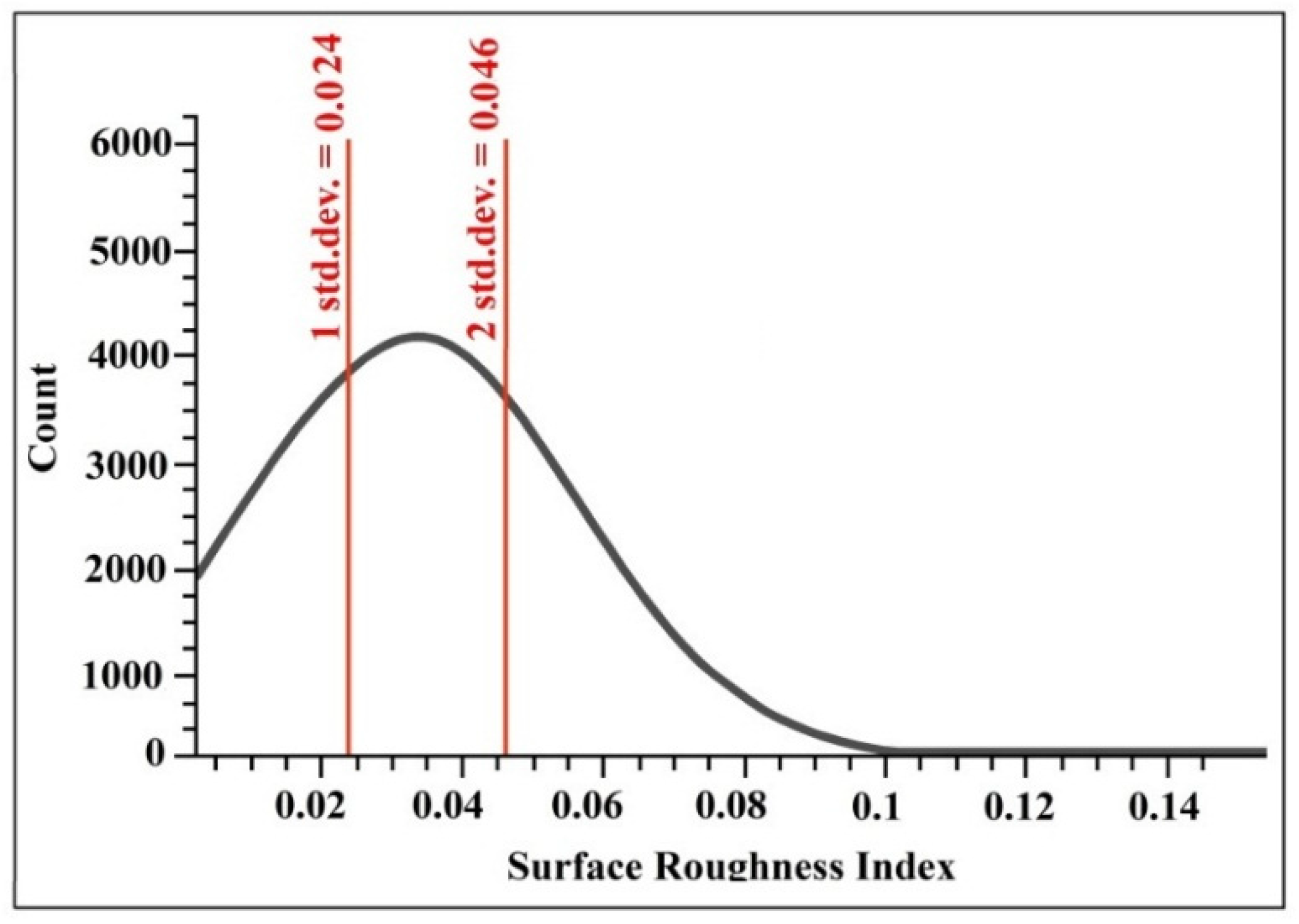
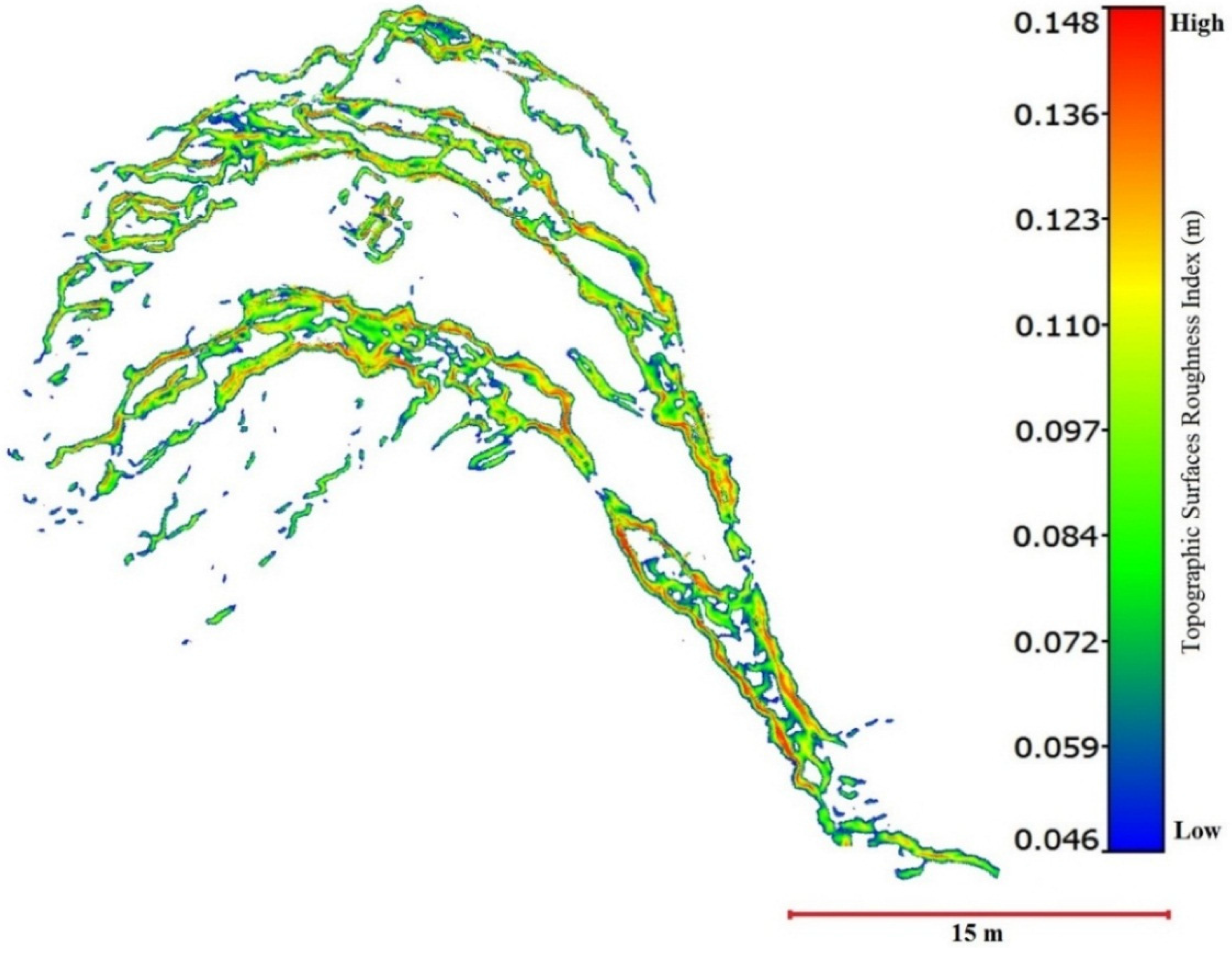
3.3.3. Surface Roughness Index

4. Results and Discussion
4.1. Dataset Description

4.2. Camera Calibration and Stability Analysis
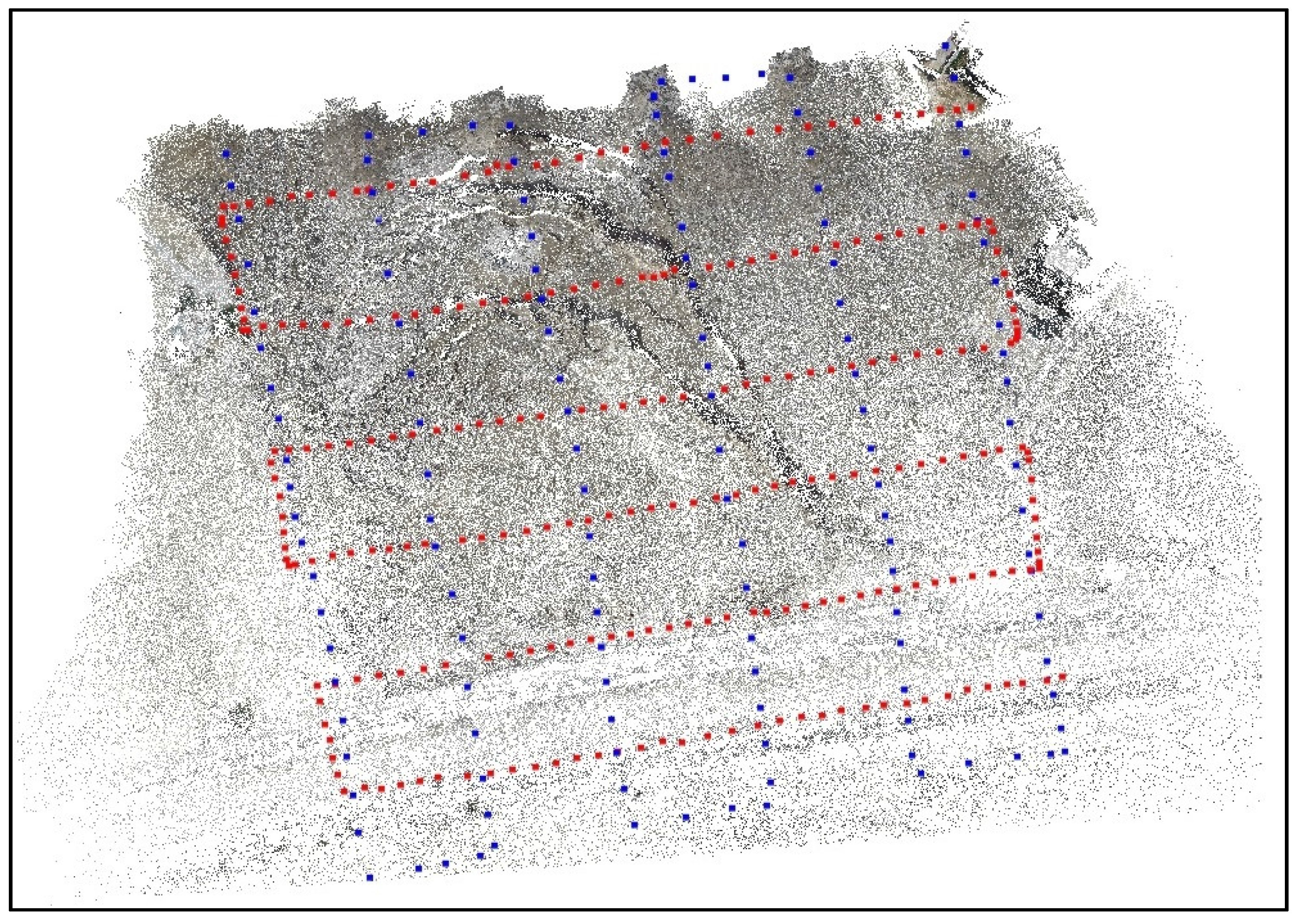
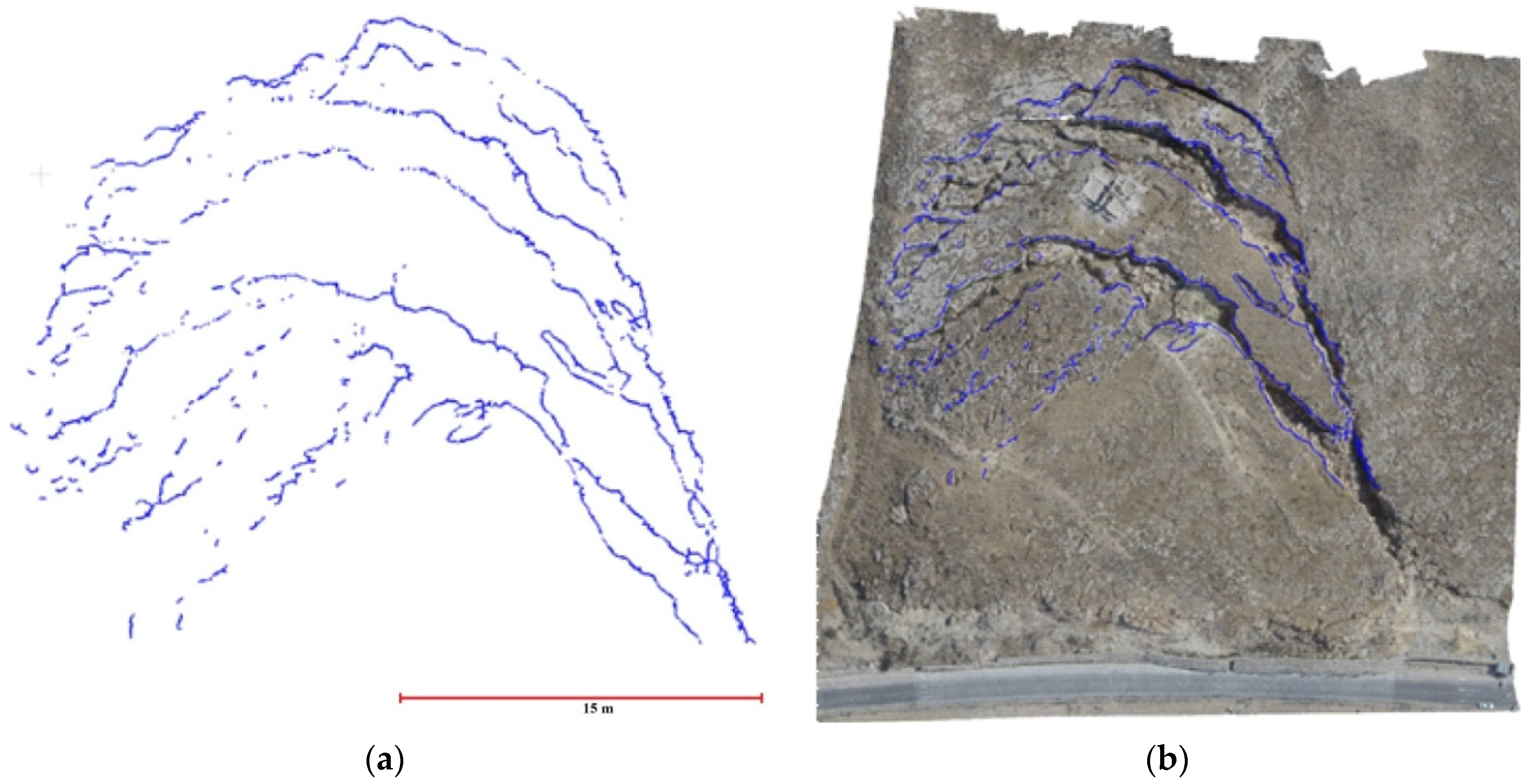
4.3. Automated Point Cloud Generation


4.4. Detection and Extraction of Landslide Scarp Features

4.4.1. Topographic Eigenvalue Ratios




4.4.2. Topographic Slope Surface




4.4.3. Topographic Surface Roughness Index




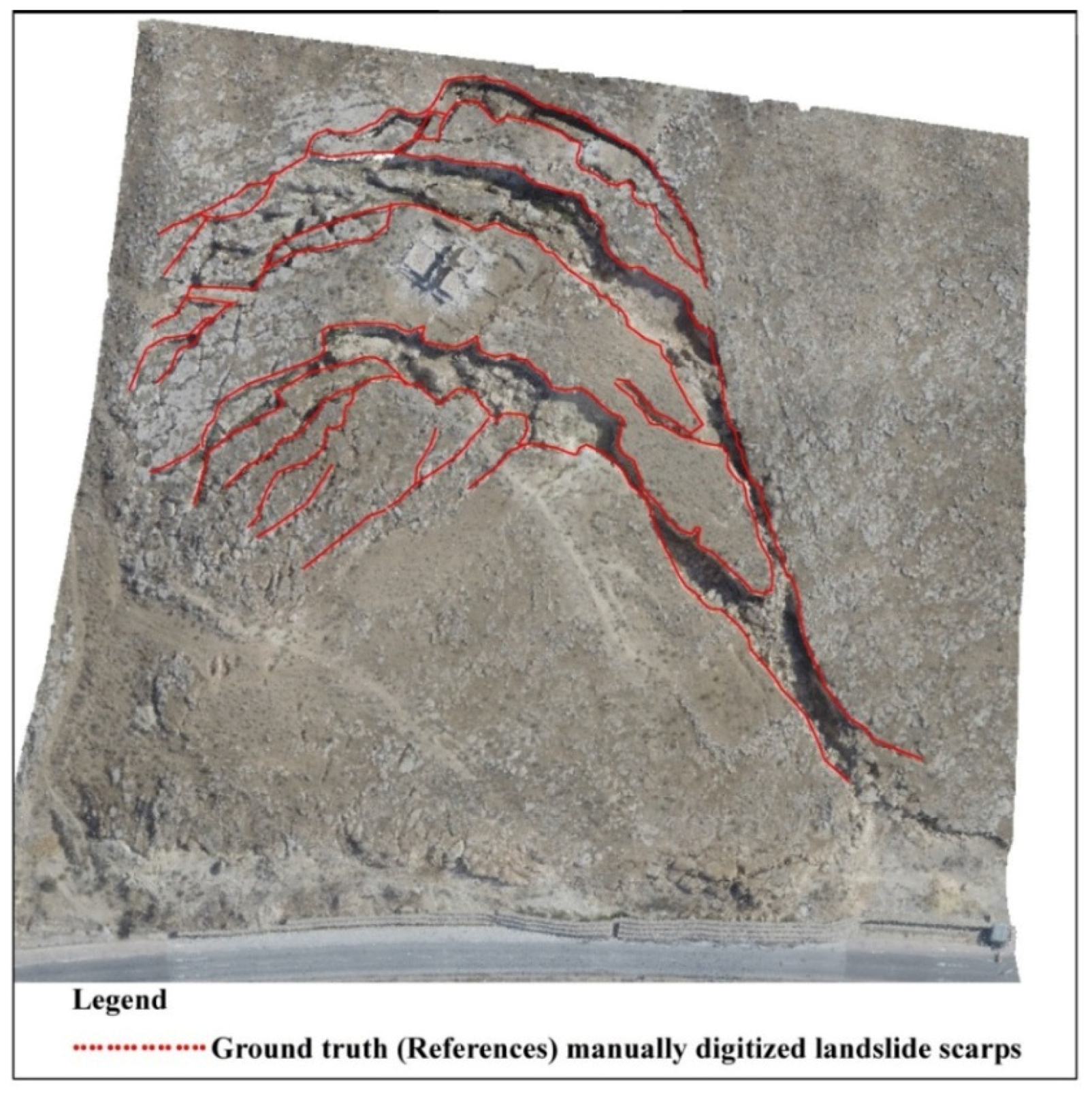
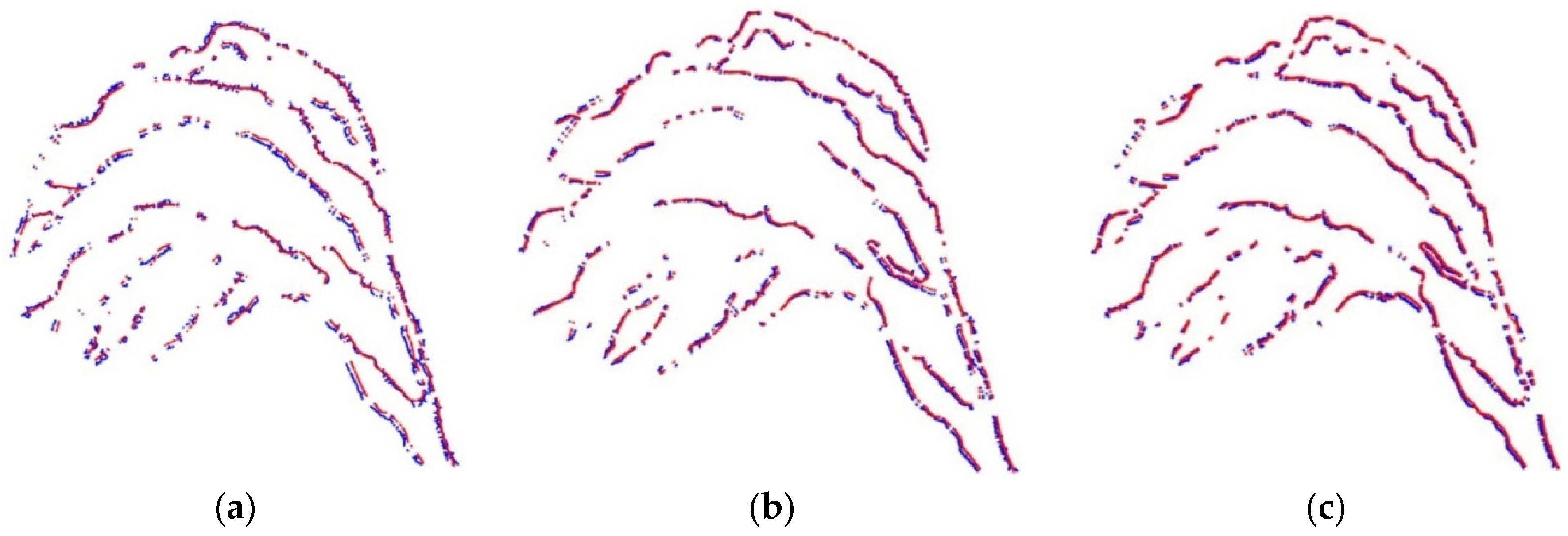
4.5. Accuracy Assessment


| Ground Truth (Reference) | ||||||
|---|---|---|---|---|---|---|
| Positive | Negative | Total | User’s Accuracy/Correctness (%) | Error of Commission (%) | ||
| Extracted Features | Positive | 3917 | 846 | 4763 | 82.24 | 17.76 |
| Negative | 1306 | 26698 | 28004 | 95.37 | 4.66 | |
| Total | 5223 | 27544 | 32767 | |||
| Producer’s Accuracy/Completeness (%) | 75.0 | 96.93 | Overall accuracy 93.43%; kappa 74.58%. | |||
| Error of Omission (%) | 25.00 | 3.07 | ||||
| Ground Truth (Reference) | ||||||
|---|---|---|---|---|---|---|
| Positive | Negative | Total | User’s Accuracy/Correctness (%) | Error of Commission (%) | ||
| Extracted Features | Positive | 3325 | 781 | 4106 | 80.98 | 19.02 |
| Negative | 1468 | 27193 | 28661 | 94.88 | 5.12 | |
| Total | 4793 | 27974 | 32767 | |||
| Producer’s Accuracy/Completeness (%) | 69.37 | 97.20 | Overall accuracy 93.14%; kappa 70.78%. | |||
| Error of Omission (%) | 30.63 | 2.79 | ||||
| Ground Truth (Reference) | ||||||
|---|---|---|---|---|---|---|
| Positive | Negative | Total | User’s Accuracy/Correctness (%) | Error of Commission (%) | ||
| Extracted Features | Positive | 3168 | 450 | 3618 | 87.56 | 12.44 |
| Negative | 1669 | 27480 | 29149 | 94.27 | 5.73 | |
| Total | 4837 | 27930 | 32767 | |||
| Producer’s Accuracy/Completeness (%) | 65.50 | 98.39 | Overall accuracy 93.53%; kappa 71.31%. | |||
| Error of Omission (%) | 34.50 | 1.61 | ||||
5. Conclusions and Recommendations for Future Work
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Nadim, F.; Kjekstad, O.; Peduzzi, P.; Herold, C.; Jaedicke, C. Global landslide and avalanche hotspots. Landslides 2006, 3, 159–173. [Google Scholar] [CrossRef]
- Pesci, A.; Teza, G.; Casula, G.; Loddo, F.; de Martino, P.; Dolce, M.; Obrizzo, F.; Pingue, F. Multitemporal laser scanner-based observation of the Mt. Vesuvius crater: Characterization of overall geometry and recognition of landslide events. ISPRS J. Photogramm. Remote Sens. 2011, 66, 327–336. [Google Scholar] [CrossRef]
- Gokceoglu, C.; Sonmez, H.; Nefeslioglu, H.A.; Duman, T.Y.; Can, T. The 17 March 2005 Kuzulu landslide (Sivas, Turkey) and landslide-susceptibility map of its near vicinity. Eng. Geol. 2005, 81, 65–83. [Google Scholar] [CrossRef]
- Glenn, N.F.; Streutker, D.R.; Chadwick, D.J.; Thackray, G.D.; Dorsch, S.J. Analysis of LiDAR-derived topographic information for characterizing and differentiating landslide morphology and activity. Geomorphology 2006, 73, 131–148. [Google Scholar] [CrossRef]
- Westoby, M.J.; Brasington, J.; Glasser, N.F.; Hambrey, M.J.; Reynolds, J.M. “Structure-from-motion” photogrammetry: A low-cost, effective tool for geoscience applications. Geomorphology 2012, 179, 300–314. [Google Scholar] [CrossRef] [Green Version]
- Schuster, R.L.; Fleming, R.W. Economic losses and fatalities due to landslides. Bull. Assoc. Eng. Geol. 1986, 23, 11–28. [Google Scholar] [CrossRef]
- Dikau, R.; Brunsden, D.; Schrott, L.; Ibsen, M.L. Landslide Recognition: Identification, Movements and Causes; John Wiley & Sons Ltd.: Chichester, UK, 1996. [Google Scholar]
- Hovius, N.; Stark, C.P.; Allen, P.A. Sediment flux from a mountain belt derived by landslide mapping. Geology 1997, 25, 231–234. [Google Scholar] [CrossRef]
- Hovius, N.; Stark, C.P.; Hao-Tsu, C.; Jiun-Chuan, L. Supply and removal of sediment in a landslide-dominated mountain belt: Central range, Taiwan. J. Geol. 2000, 108, 73–89. [Google Scholar] [CrossRef] [PubMed]
- Jakob, M. The impacts of logging on landslide activity at Clayoquot Sound, British Columbia. Catena 2000, 38, 279–300. [Google Scholar] [CrossRef]
- Guzzetti, F.; Cardinali, M.; Reichenbach, P.; Carrara, A. Comparing landslide maps: A case study in the upper Tiber River basin, Central Italy. Environ. Manag. 2000, 25, 247–263. [Google Scholar] [CrossRef]
- McKean, J.; Roering, J. Objective landslide detection and surface morphology mapping using high-resolution airborne laser altimetry. Geomorphology 2004, 57, 331–351. [Google Scholar] [CrossRef]
- Zhu, J.J.; Ding, X.L.; Chen, Y.Q. Dynamic landsliding model with integration of monitoring information and mechanic information. Acta Geod. Cartogr. Sin. 2003, 32, 261–266. [Google Scholar]
- Mahler, C.; Varanda, E.; de Oliveira, L. Analytical model of landslide risk using GIS. Open J. Geol. 2005, 2, 182–188. [Google Scholar] [CrossRef]
- Zhang, J. 3S-aided landslide hazard monitoring and modeling. Eng. Surv. Mapp. 2015, 14, 1–5. [Google Scholar]
- Booth, A.M.; Roering, J.J.; Perron, J.T. Automated landslide mapping using spectral analysis and high-resolution topographic data: Puget Sound lowlands, Washington, and Portland Hills, Oregon. Geomorphology 2009, 109, 132–147. [Google Scholar] [CrossRef]
- He, Y.P.; Xie, H.; Cui, P.; Wei, F.Q.; Zhong, D.L.; Gardner, J.S. GIS-based hazard mapping and zonation of debris flows in Xiaojiang Basin, southwestern China. Environ. Geol. 2003, 45, 286–293. [Google Scholar] [CrossRef]
- Donati, L.; Turrini, M.C. An objective method to rank the importance of the factors predisposing to landslides with the GIS methodology: Application to an area of the Apennines (Valnerina; Perugia, Italy). Eng. Geol. 2002, 63, 277–289. [Google Scholar] [CrossRef]
- Singhroy, V. Landslide Hazards: CEOS, the Use of Earth Observing Satellites for Hazard Support: Assessments and Scenarios; Final Report of the CEOS; NOAA: Silver Spring, MD, USA, 2002; p. 98.
- Mantovani, F.; Soeters, R.; van Westen, C.J. Remote sensing techniques for landslide studies and hazard zonation in Europe. Geomorphology 1996, 15, 213–225. [Google Scholar] [CrossRef]
- Martha, T.R.; Kerle, N.; Jetten, V.; van Westen, C.J.; Kumar, K. Landslide volumetric analysis using Cartosat-1-derived DEMs. IEEE Geosci. Remote Sens. Lett. 2010, 7, 582–586. [Google Scholar] [CrossRef]
- Galli, M.; Ardizzone, F.; Cardinali, M.; Guzzetti, F.; Reichenbach, P. Comparing landslide inventory maps. Geomorphology 2008, 94, 268–289. [Google Scholar] [CrossRef]
- Lin, P.; Lin, J.; Hung, H.C.; Yang, M. Assessing debris-flow hazard in a watershed in Taiwan. Eng. Geol. 2002, 66, 295–313. [Google Scholar] [CrossRef]
- Martin, Y.; Rood, K.; Schwab, J.W.; Church, M. Sediment transfer by shallow landsliding in the Queen Charlotte Islands, British Columbia. Can. J. Earth Sci. 2002, 39, 189–205. [Google Scholar] [CrossRef]
- Westen, C.J.; Getahun, F. Analyzing the evolution of the Tessina landslide using aerial photographs and digital elevation models. Geomorphology 2003, 54, 77–89. [Google Scholar] [CrossRef]
- Hervás, J.; Barredo, J.I.; Rosin, P.L.; Pasuto, A.; Mantovi, F.; Silvano, S. Monitoring landslides from optical remotely sensed imagery: The case history of Tessina landslide, Italy. Geomorphology 2003, 54, 63–75. [Google Scholar] [CrossRef]
- Sauchyn, D.; Trench, N. Landsat applied to landslide mapping. Photogramm. Eng. Remote Sens. 1978, 44, 735–741. [Google Scholar]
- Connors, K.F.; Gardner, T.W.; Petersen, G.W. Classification of geomorphic features and landscape stability in northwestern New Mexico using simulated SPOT imagery. Remote Sens. Environ. 1987, 22, 187–207. [Google Scholar] [CrossRef]
- Epp, H.; Beaven, L. Mapping slope failure tracks with digital thematic mapper data. In Proceedings of the 1988 International Geoscience and Remote Sensing Symposium on Remote Sensing: Moving Towards the 21st Century, Edinburgh, UK, 12–16 September1988.
- McKean, J.; Buechel, S.; Gaydos, L. Remote sensing and landslide hazard assessment. Photogramm. Eng. Remote Sens. 1991, 57, 1185–1193. [Google Scholar]
- Li, X.; Cheng, X.; Chen, W.; Chen, G.; Liu, S. Identification of forested landslides using LiDar data, object-based image analysis, and machine learning algorithms. Remote Sens. 2015, 7, 9705–9726. [Google Scholar] [CrossRef]
- Barlow, J.; Martin, Y.; Franklin, S.E. Detecting translational landslide scars using segmentation of Landsat ETM+ and DEM data in the northern Cascade Mountains, British Columbia. Can. J. Remote Sens. 2003, 29, 510–517. [Google Scholar] [CrossRef]
- Schulz, W.H. Landslides Mapped Using LIDAR imagery, Seattle, Washington; Open File Report 04-1396; USA Department of the Interior: Seattle, WA, USA.
- Dou, J.; Chang, K.; Chen, S.; Yunus, A.; Liu, J.; Xia, H.; Zhu, Z. Automatic case-based reasoning approach for landslide detection: Integration of object-oriented image analysis and a genetic algorithm. Remote Sens. 2015, 7, 4318–4342. [Google Scholar] [CrossRef]
- Kraus, K.; Pfeifer, N. Determination of terrain models in wooded areas with airborne laser scanner data. ISPRS J. Photogramm. Remote Sens. 1998, 53, 193–203. [Google Scholar] [CrossRef]
- Vosselman, G. Slope-based filtering of laser altimetry data. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2000, 33, 935–942. [Google Scholar]
- Gold, R.D.; Wegmann, K.W.; Palmer, S.P.; Carson, R.J.; Spencer, P.K. A Comparative Study of Aerial Photographs and LiDAR Imagery for Landslide Detection in the Puget Lowland, Washington. In Proceedings of the 99th Annual Meeting, Puerto Vallarta, Jalisco, Mexico, 1–3 April 2003.
- Rowlands, K.A.; Jones, L.D.; Whitworth, M. Landslide laser scanning: A new look at an old problem. Q. J. Eng. Geol. Hydrogeol. 2003, 36, 155–157. [Google Scholar] [CrossRef]
- Sithole, G.; Vosselman, G. Experimental comparison of filter algorithms for bare-earth extraction from airborne laser scanning point clouds. ISPRS J. Photogramm. Remote Sens. 2004, 59, 85–101. [Google Scholar] [CrossRef]
- Hsaio, K.; Lu, J.; Yu, M.; Tseng, G.Y. Change detection of landslide terrains using ground-based Lidar data. In Proceedings of the 20th ISPRS Congress, Istanbul, Turkey, 12–23 July 2004.
- Metternicht, G.; Hurni, L.; Gogu, R. Remote sensing of landslides: An analysis of the potential contribution to geo-spatial systems for hazard assessment in mountainous environments. Remote Sens. Environ. 2005, 98, 284–303. [Google Scholar] [CrossRef]
- Bull, J.M.; Miller, H.; Gravley, D.M.; Costello, D.; Hikuroa, D.C.H.; Dix, J.K. Assessing debris flows using LIDAR differencing: 18 May 2005 Matata event, New Zealand. Geomorphology 2010, 124, 75–84. [Google Scholar] [CrossRef]
- Schulz, W.H. Landslide Susceptibility Estimated from Mapping Using Light Detection and Ranging (LIDAR) Imagery and Historical Landslide Records; Open File Report 2005-1405; USA Department of the Interior: Seattle, WA, USA.
- Miner, A.S.; Flentje, P.; Mazengarb, C.; Windle, D.J. Landslide recognition using LiDAR derived digital elevation models-lessons learnt from selected Australian example. In Proceedings of the 11th IAEG Congress of the International Association of Engineering Geology and the Environment, Auckland, New Zealand, 5–10 September 2010; pp. 5–9.
- Leshchinsky, B.A.; Olsen, M.J.; Tanyu, B.F. Contour connection method for automated identification and classification of landslide deposits. Comput. Geosci. 2015, 74, 27–38. [Google Scholar] [CrossRef]
- Gibson, A.; Forster, A.F.; Poulton, C.; Rowlands, K.; Jones, L.; Hobbs, P.; Whitworth, M. An integrated method for terrestrial laser-scanning subtle landslide features and their geomorphological setting. In Proceedings of the Remote Sensing and Photogrammetry Society 2003: Scales and Dynamics in Observing the Environment, Nottingham, England, UK, 10–12 September 2003.
- Rosser, N.J.; Petley, D.N.; Lim, M.; Dunning, S.A.; Allison, R.J. Terrestrial laser scanning for monitoring the process of hard rock coastal cliff erosion. Q. J. Eng. Geol. Hydrogeol. 2005, 38, 363–375. [Google Scholar] [CrossRef]
- Bauer, A.; Paar, G.; Kaltenböck, A. Mass movement monitoring using terrestrial laser scanner for rock fall management. In Proceedings of the 1st International Symposium on Geoinformation for Disaster Management, Delft, The Netherlands, 21–23 March 2005.
- Lim, M.; Petley, D.N.; Rosser, N.J.; Allison, R.J.; Long, A.J.; Pybus, D. Combined digital photogrammetry and time-of-flight laser scanning for monitoring cliff evolution. Photogramm. Rec. 2005, 20, 109–129. [Google Scholar] [CrossRef] [Green Version]
- Dunning, S.A.; Massey, C.I.; Rosser, N.J. Structural and geomorphological features of landslides in the Bhutan Himalaya derived from terrestrial laser scanning. Geomorphology 2009, 103, 17–29. [Google Scholar] [CrossRef]
- Jaboyedoff, M.; Couture, R.; Locat, P. Structural analysis of Turtle Mountain (Alberta) using digital elevation model: Toward a progressive failure. Geomorphology 2009, 103, 5–16. [Google Scholar] [CrossRef]
- Sturzenegger, M.; Stead, D. Quantifying discontinuity orientation and persistence on high mountain rock slopes and large landslides using terrestrial remote sensing techniques. Nat. Hazards Earth Syst. Sci. 2009, 9, 267–287. [Google Scholar] [CrossRef]
- Jaboyedoff, M.; Oppikofer, T.; Abellán, A.; Derron, M.; Loye, A.; Metzger, R.; Pedrazzini, A. Use of LiDAR in landslide investigations: A review. Nat. Hazards 2012, 61, 5–28. [Google Scholar] [CrossRef]
- Ahmad, A. Digital photogrammetry: An experience of processing aerial photograph of UTM acquired using digital camera. In Proceedings of the AsiaGIS, Johor, Malaysia, 3–5 March 2006.
- Marek, L.; Miřijovský, J.; Tuček, P. Monitoring of the shallow landslide using UAV photogrammetry and geodetic measurements. In Engineering Geology for Society and Territory; Springer Verlag International Publishing: Gewerbestrasse, Switzerland, 2015; Volume 2, pp. 113–116. [Google Scholar]
- Pajares, G. Overview and current status of remote sensing applications based on unmanned aerial vehicles (UAVS). Photogramm. Eng. Remote Sens. 2015, 81, 281–330. [Google Scholar] [CrossRef]
- Niethammer, U.; James, M.R.; Rothmund, S.; Travelletti, J.; Joswig, M. UAV-based remote sensing of the super-Sauze landslide: Evaluation and results. Eng. Geol. 2012, 128, 2–11. [Google Scholar] [CrossRef]
- Colomina, I.; Molina, P. Unmanned aerial systems for photogrammetry and remote sensing: A review. ISPRS J. Photogramm. Remote Sens. 2014, 92, 79–97. [Google Scholar] [CrossRef]
- Morillas, L.; García, M.; Nieto, H.; Villagarcia, L.; Sandholt, I.; Gonzalez-Dugo, M.P.; Zarco-Tejada, P.J.; Domingo, F. Using radiometric surface temperature for surface energy flux estimation in Mediterranean drylands from a two-source perspective. Remote Sens.Environ. 2013, 136, 234–246. [Google Scholar] [CrossRef]
- Frankenberger, J.R.; Huang, C.; Nouwakpo, K. Low-altitude digital photogrammetry technique to assess ephemeral gully erosion. In Proceedings of the IEEE International Geoscience and Remote Sensing Symposium (IGARSS 2008), Boston, MA, USA, 7–11 July 2008; pp. 117–120.
- Agüera, F.; Carvajal, F.; Pérez, M. Measuring sunflower nitrogen status from an unmanned aerial vehicle-based system and an on the ground device. ISPRS Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2011, 22, 33–37. [Google Scholar] [CrossRef]
- Rau, J.; Jhan, J.; Lob, C.; Linb, Y. Landslide mapping using imagery acquired by a fixed-wing UAV. ISPRS Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2011, 22, 195–200. [Google Scholar] [CrossRef]
- Turner, D.; Lucieer, A.; de Jong, S.M. Time series analysis of landslide dynamics using an unmanned aerial vehicle (UAV). Remote Sens. 2015, 7, 1736–1757. [Google Scholar] [CrossRef]
- Stumpf, A.; Lampert, T.A.; Malet, J.; Kerle, N. Multi-scale line detection for landslide fissure mapping. In Proceedings of the IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Munich, Germany, 22–27 July 2011; pp. 5450–5453.
- Stumpf, A.; Malet, J.P.; Kerle, N.; Niethammer, U.; Rothmund, S. Image-based mapping of surface fissures for the investigation of landslide dynamics. Geomorphology 2013, 186, 12–27. [Google Scholar] [CrossRef] [Green Version]
- Lin, Y.; Hyyppä, J.; Jaakkola, A. Mini-UAV-borne LIDAR for fine-scale mapping. IEEE Geosci. Remote Sens. Lett. 2011, 8, 426–430. [Google Scholar] [CrossRef]
- Niethammer, U.; Rothmund, S.; Schwaderer, U.; Zeman, L.; Joswig, M. Open source image-processing tools for lowcost UAV-based landslide investigations. ISPRS Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2011, 22, 57–62. [Google Scholar]
- Towler, J.; Krawiec, B.; Kochersberger, K. Radiation mapping in post-disaster environments using an autonomous helicopter. Remote Sens. 2012, 4, 1995–2015. [Google Scholar] [CrossRef]
- Qian, Y.; Shengbo, C.; Peng, L.; Tengfei, C.; Ming, M.; Yanli, L.; Chao, Z.; Liang, Z. Application of low-altitude remote sensing image by unmanned airship in geological hazards investigation. In Proceedings of the Image and Signal Processing 5th International Congress, Chongqing, China, 16–18 October 2012; pp. 1015–1018.
- WAJ—Water Authority of Jordan, WAJ Internal Files for Groundwater. Basins in Jordan. 2006. Available online: http://www. mwi.gov.jo/sites/en-us (accessed on 15 September 2015).
- Abderahman, N.S. Landslide at km 56.4 along the Irbid-Amman Highway, Northern Jordan. Environ. Geosci. 1998, 5, 103–114. [Google Scholar] [CrossRef]
- Masri, M. Report on the Geology of the Amman-Zarqa Area; Central Water Authority: Amman, Jordan, 1963.
- Sawariah, A.; Barjous, M. Geological Map of Suwaylih Scale 1:50,000, Sheet No. 3154-II; Natural Resources Authority: Amman, Jordan, 1993.
- Powell, J.H. Stratigraphy and Sedimentation of the Phanerozoic Rocks in Central and South Jordan. Part B: Kurnub, Ajlun, and Balqa Groups, Bull. 11, NRA; Geological Directorate: Amman, Jordan, 1989; p. 130.
- Malkawi, A.I.H.; Saleh, B.; Al-Sheriadeh, M.S.; Hamza, M.S. Mapping of landslide hazard zones in Jordan using remote sensing and GIS. J. Urban Plan. Dev. 2000, 126, 1–17. [Google Scholar] [CrossRef]
- Saket, S.K.H. Slope Instability on the Jordanian Highways; Unpublished Report; Ministry of Public Works and Housing (MPWH): Amman, Jordan, 1974.
- Al Rawashdeh, S.; Bassam, S. Studying land sliding and geospatial deformation based on conventional survey and GPS. In Proceedings of the Geospatial Scientific Summit, Dubai, United Arab Emirates, 12–13 November 2012.
- Habib, A.; Jarvis, A.; Detchev, G.; Stensaas, D.; Moe, D.; Christopherson, J. Standards and specifications for the calibration and stability of amateur digital cameras for close-range mapping applications. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2008, 37, 1059–1064. [Google Scholar]
- Habib, A.; Pullivelli, A.; Mitishita, E.; Ghanma, M.; Kim, E. Stability analysis of low-cost digital cameras for aerial mapping using different georeferencing techniques. Photogramm. Rec. 2006, 21, 29–43. [Google Scholar] [CrossRef]
- Al-Rawabdeh, A.; He, F.; Habib, A. Comparative analysis using Multi-sensory data integration for extracting geotechnical parameters. In Proceedings of the ASPRS 2014 Annual Conference, Louisville, KY, USA, 23–28 March 2014.
- He, F.; Habib, A.; Al-Rawabdeh, A. Planar constraints for an improved UAV-image-based dense point cloud generation. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2015. [Google Scholar] [CrossRef]
- Varnes, D. Slope movement types and processes. In Landslides Analysis and Control; Schuster, R.L., Krizek, R.J., Eds.; National Academy of Sciences: New York, NY, USA, 1978; Volume 176, pp. 12–33. [Google Scholar]
- Van den Eeckhaut, M.; Poesen, J.; Govers, G.; Verstraeten, G.; Demoulin, A. Characteristics of the size distribution of recent and historical landslides in a populated hilly region. Earth Planet. Sci. Lett. 2007, 256, 588–603. [Google Scholar] [CrossRef]
- He, F.; Habib, A. Linear approach for initial recovery of the exterior orientation parameters of randomly captured images by low-coast mobile mapping system. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2014, 1, 149–154. [Google Scholar] [CrossRef]
- Lowe, D.G. Distinctive image features from scale-invariant key points. Int. J. Comput. Vis. 2004, 60, 91–110. [Google Scholar] [CrossRef]
- Cho, W.; Schenk, T.; Madani, M. Resampling digital imagery to epipolar geometry. Int. Arch. Photogramm. Remote Sens. 1993, 29, 404–404. [Google Scholar]
- Guzzetti, F.; Carrara, A.; Cardinali, M.; Reichenbach, P. Landslide hazard evaluation: A review of current techniques and their application in a multi-scale study, Central Italy. Geomorphology 1999, 31, 181–216. [Google Scholar] [CrossRef]
- Kasai, M.; Ikeda, M.; Asahina, T.; Fujisawa, K. LiDAR-derived DEM evaluation of deep-seated landslides in a steep and rocky region of Japan. Geomorphology 2009, 113, 57–69. [Google Scholar] [CrossRef]
- Woodcock, N.H. Specification of fabric shapes using an eigenvalue method. Geol. Soc. Am. Bull. 1977, 88, 1231–1236. [Google Scholar] [CrossRef]
- Woodcock, N.H.; Naylor, M.A. Randomness testing in three-dimensional orientation data. J. Struct. Geol. 1983, 5, 539–548. [Google Scholar] [CrossRef]
- Bentley, J.L. Multidimensional binary search trees used for associative searching. Commun. ACM 1975, 18, 509–517. [Google Scholar] [CrossRef]
- Arya, S.; Mount, D.M.; Netanyahu, N.S.; Silverman, R.; Wu, A.Y. An optimal algorithm for approximate nearest neighbor searching fixed dimensions. J. ACM 1998, 45, 891–923. [Google Scholar] [CrossRef]
- Pauly, M.; Gross, M.; Kobbelt, L.P. Efficient simplification of point-sampled surface. In Proceedings of the Conference on Visualization, Boston, MA, USA, 27 October–1 November 2002; IEEE Computer Society: Washington, DC, USA, 2002; pp. 163–170. [Google Scholar]
- Lee, S.; Min, K. Statistical analysis of landslide susceptibility at Yongin, Korea. Environ. Geol. 2001, 40, 1095–1113. [Google Scholar] [CrossRef]
- Coblentz, D.; Pabian, F.; Prasad, L. Quantitative geomorphometrics for terrain characterization. Int. J. Geosci. 2014, 5, 247–266. [Google Scholar] [CrossRef]
- Çevik, E.; Topal, T. GIS-based landslide susceptibility mapping for a problematic segment of the natural gas pipeline, Hendek (Turkey). Environ. Geol. 2003, 44, 949–962. [Google Scholar] [CrossRef]
- Lee, S.; Choi, J.; Min, K. Probabilistic landslide hazard mapping using GIS and remote sensing data at Boun, Korea. Int. J. Remote Sens. 2004, 25, 2037–2052. [Google Scholar] [CrossRef]
- Lee, S. Application of logistic regression model and its validation for landslide susceptibility mapping using GIS and remote sensing data. Int. J. Remote Sens. 2005, 26, 1477–1491. [Google Scholar] [CrossRef]
- Iwahashi, J.; Watanabe, S.; Furuya, T. Mean slope-angle frequency distribution and size frequency distribution of landslide masses in Higashikubiki area, Japan. Geomorphology 2003, 50, 349–364. [Google Scholar] [CrossRef]
- Tarolli, P. High-resolution topography for understanding Earth surface processes: Opportunities and challenges. Geomorphology 2014, 216, 295–312. [Google Scholar] [CrossRef]
- Hobson, R.D. Surface roughness in topography: A quantitative approach. In Spatial Analysis in Geomorphology; Chorley, R.J., Ed.; Methuen & Co.: London, UK, 1972; pp. 221–245. [Google Scholar]
- Habib, A.F.; Shin, S.W.; Morgan, M.F. New approach for calibrating off-the-shelf digital cameras. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2002, 34, 144–149. [Google Scholar]
- Habib, A.F.; Ghanma, M.S.; Al-Ruzouq, R.I.; Kim, E.M. 3-d Modelling of historical sites using low-cost digital cameras. In Proceedings of the XXth Congress of ISPRS, Istanbul, Turkey, 12–23 July 2004.
- Habib, A.F.; Pullivelli, A.M. Camera stability analysis and geo-referencing. In Proceedings of the IEEE International Geoscience and Remote Sensing Symposium, Seoul, Korea, 25–29 July 2005; pp. 1169–1172.
- Zhan, Q.; Molenaar, M.; Tempfli, K.; Shi, W. Quality assessment for geo-spatial objects derived from remotely sensed data. Int. J. Remote Sens. 2005, 26, 2953–2974. [Google Scholar] [CrossRef]
- Tuermer, S.; Kurz, F.; Reinartz, P.; Stilla, U. Airborne vehicle detection in dense urban areas using HoG features and disparity maps. IEEE J. Sel. Top. Appl. Earth Observ. Remote Sens. 2013, 6, 2327–2337. [Google Scholar] [CrossRef]
- Sim, J.; Wright, C.C. The Kappa statistics in reliability statistics: Use, interpretation, and sample size analysis. J. Am. Phys. Ther. Assoc. 2005, 85, 257–268. [Google Scholar]
- Cohen, J. A coefficient of agreement for nominal scales. Educ. Psychol. Meas. 1960, 20, 37–46. [Google Scholar] [CrossRef]
- Landis, J.R.; Koch, G.G. The measurement of observer agreement for categorical data. Biometrics 1977, 33, 159–174. [Google Scholar] [CrossRef] [PubMed]
- Monserud, R.A.; Leemans, R. Comparing global vegetation maps with the Kappa statistic. Ecol. Model. 1992, 62, 275–293. [Google Scholar] [CrossRef]
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons by Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Al-Rawabdeh, A.; He, F.; Moussa, A.; El-Sheimy, N.; Habib, A. Using an Unmanned Aerial Vehicle-Based Digital Imaging System to Derive a 3D Point Cloud for Landslide Scarp Recognition. Remote Sens. 2016, 8, 95. https://doi.org/10.3390/rs8020095
Al-Rawabdeh A, He F, Moussa A, El-Sheimy N, Habib A. Using an Unmanned Aerial Vehicle-Based Digital Imaging System to Derive a 3D Point Cloud for Landslide Scarp Recognition. Remote Sensing. 2016; 8(2):95. https://doi.org/10.3390/rs8020095
Chicago/Turabian StyleAl-Rawabdeh, Abdulla, Fangning He, Adel Moussa, Naser El-Sheimy, and Ayman Habib. 2016. "Using an Unmanned Aerial Vehicle-Based Digital Imaging System to Derive a 3D Point Cloud for Landslide Scarp Recognition" Remote Sensing 8, no. 2: 95. https://doi.org/10.3390/rs8020095
APA StyleAl-Rawabdeh, A., He, F., Moussa, A., El-Sheimy, N., & Habib, A. (2016). Using an Unmanned Aerial Vehicle-Based Digital Imaging System to Derive a 3D Point Cloud for Landslide Scarp Recognition. Remote Sensing, 8(2), 95. https://doi.org/10.3390/rs8020095