Evaluation of Seed Emergence Uniformity of Mechanically Sown Wheat with UAV RGB Imagery


 ,
, 

Abstract
:
1. Introduction
2. Materials and Methods
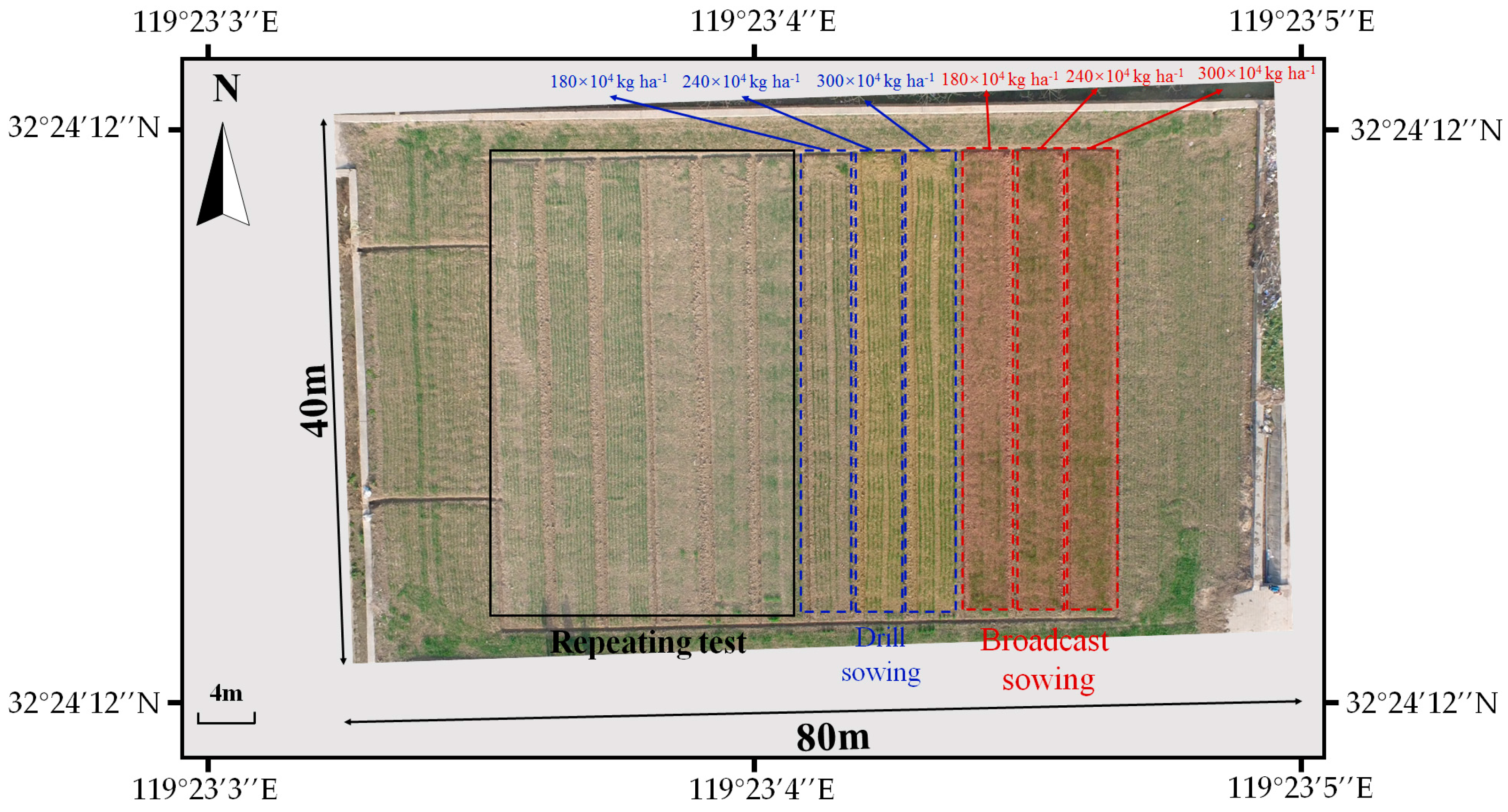
2.1. Field Trials
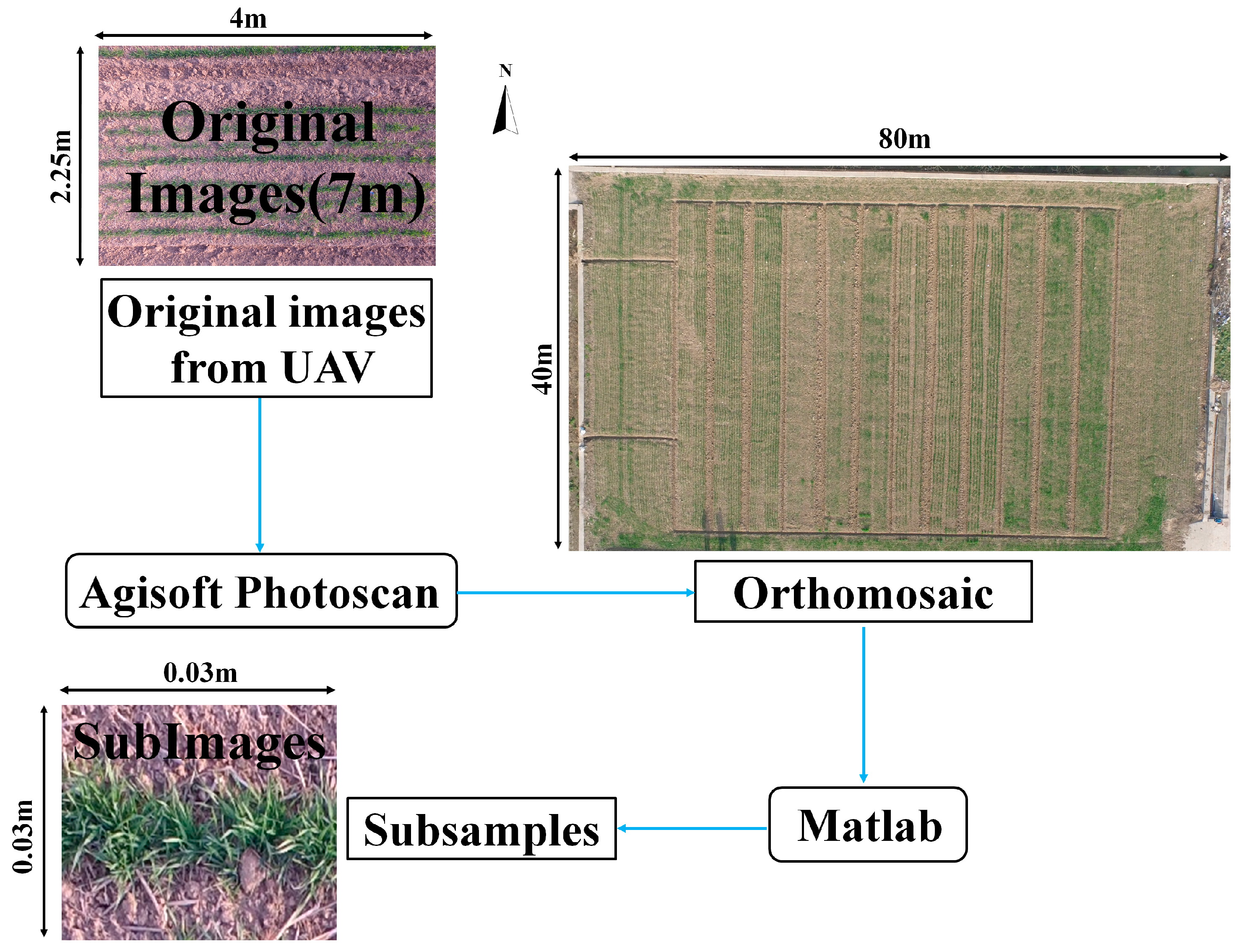
2.2. Image Acquisition
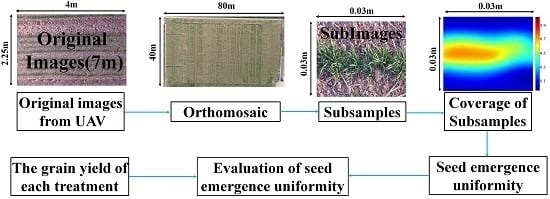
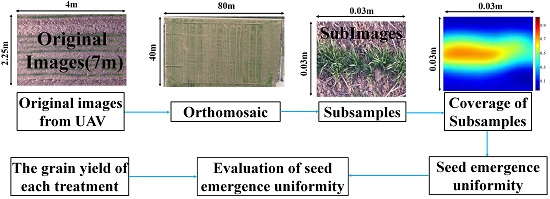
2.3. Image Processing
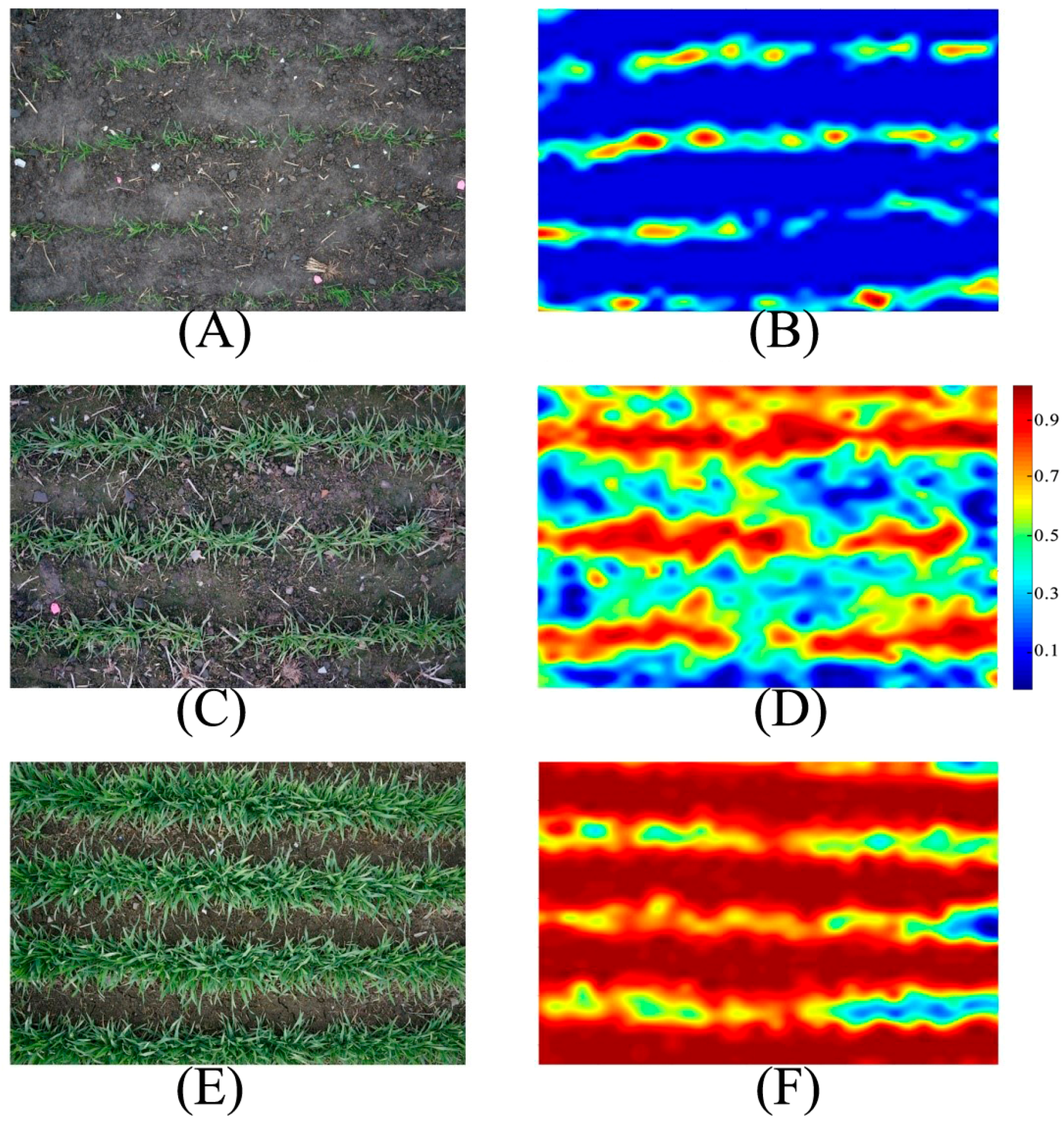
2.3.1. Image Segmentation
2.3.2. Calculation of Seed Emergence Uniformity
2.4. Localization of Seedlingless Ridges in Drill Sowing
2.5. Localization of Missing Seedling in Broadcast Sowing
2.6. Uniformity Evaluation
3. Results
3.1. Localization of Seedlingless Ridges in Drill Sowing
3.2. Localization of Missing Seedlings in Broadcast Sowing
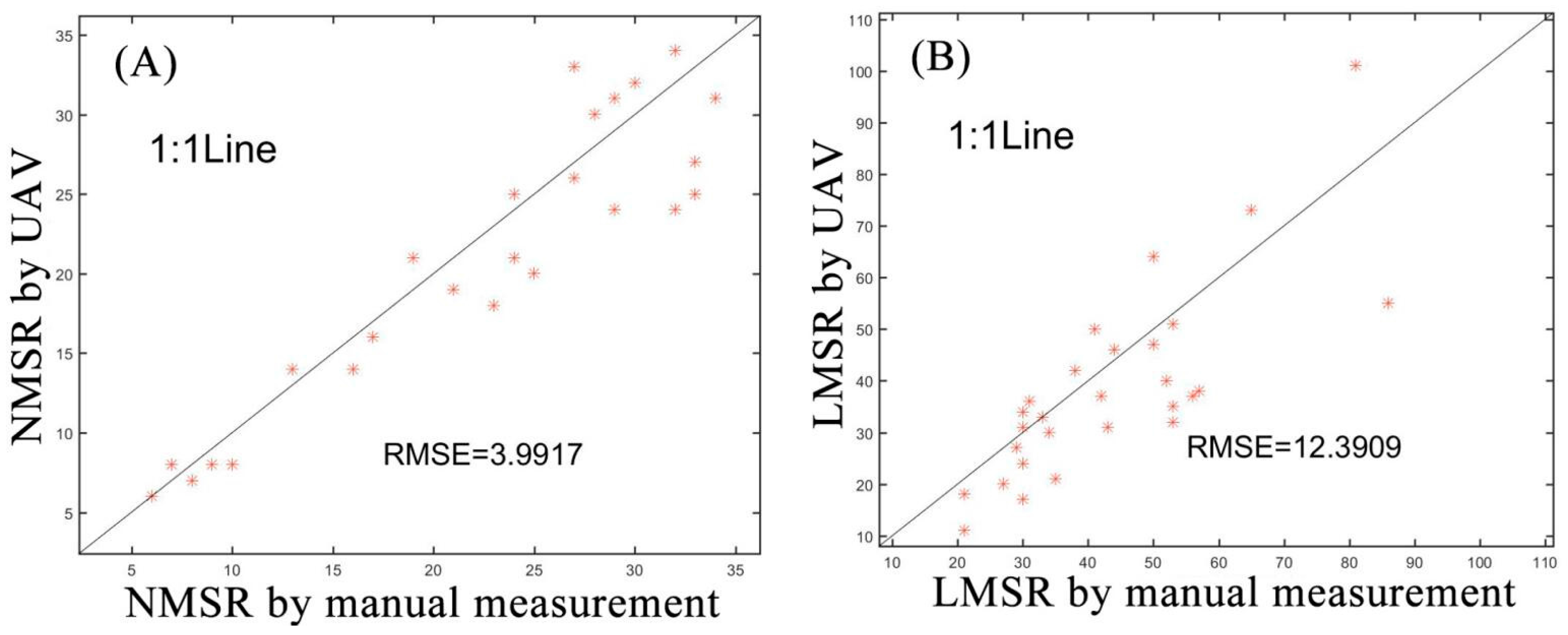
3.3. Test of Wheat Seed Emergence Uniformity
3.4. Test of Drill Sowing Wheat Seedling-Missing Region
3.5. Test of Broadcast Sowing Wheat Seedling-Missing Region
3.6. Uniformity Evaluation under Different Plant Density
4. Discussion
4.1. Acquisition Time
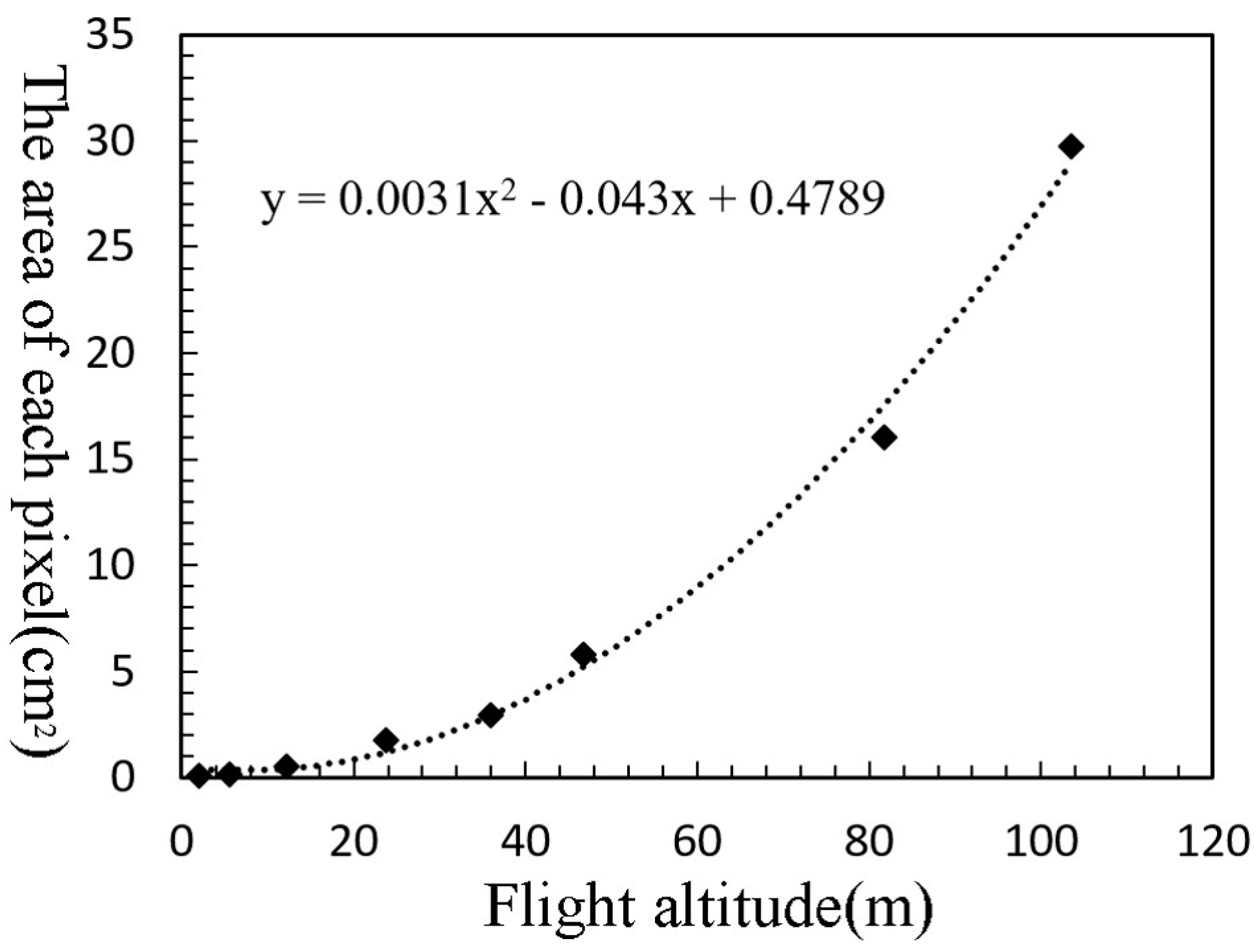
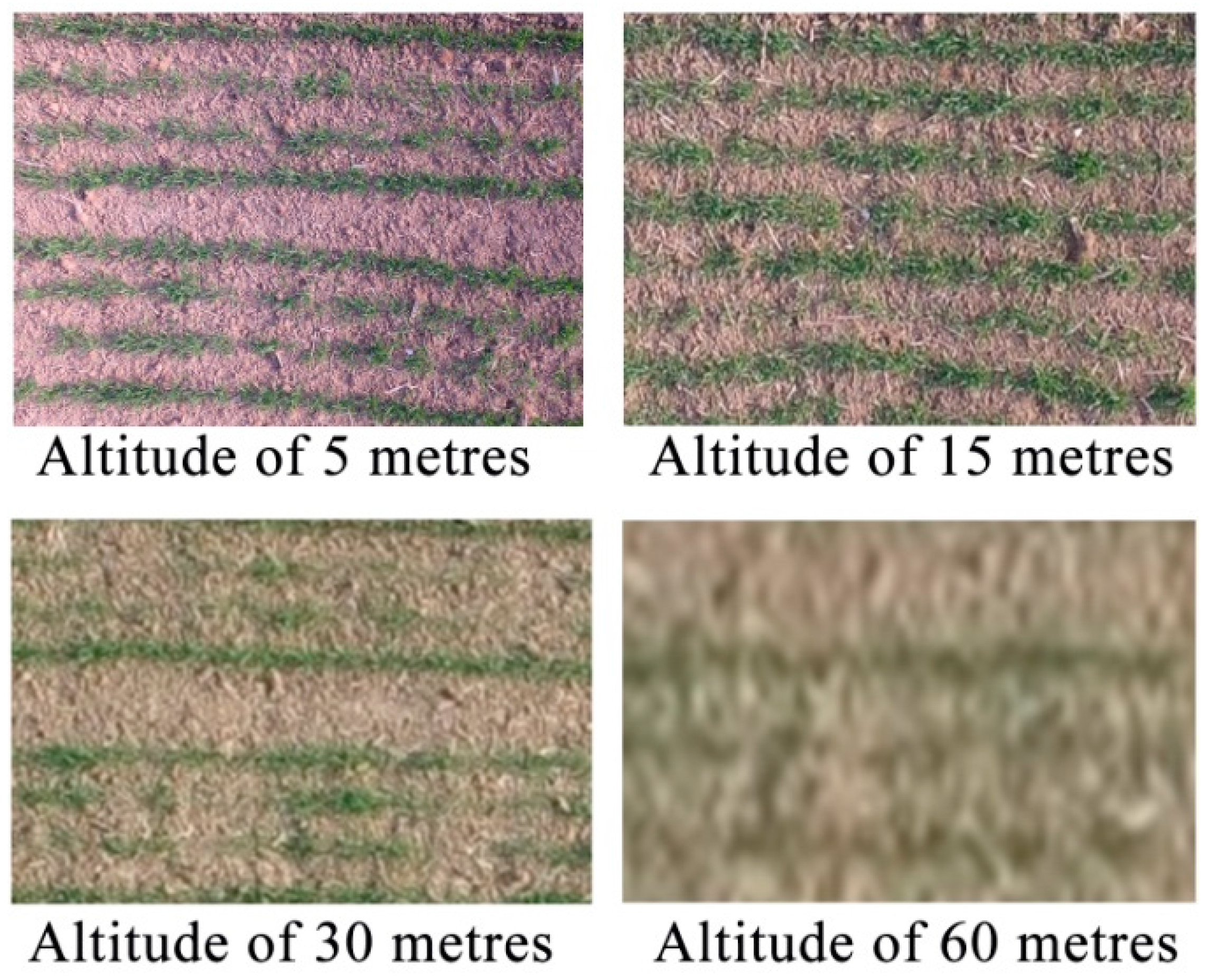
4.2. Flight Attitude
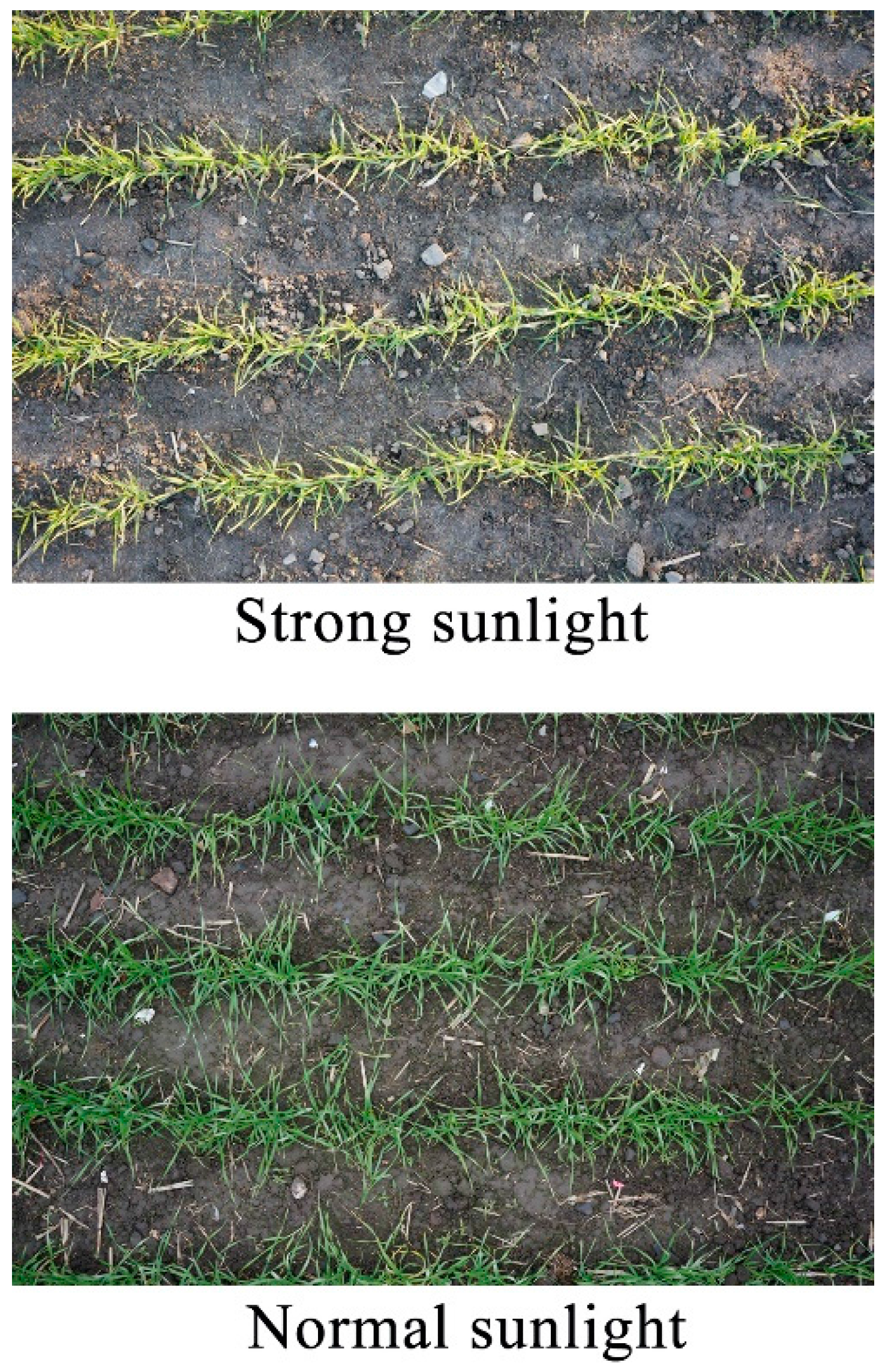
4.3. Illumination Condition
4.4. The Component of Field
4.5. The Effect of Emergence Uniformity
4.6. Comparison to Others
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Jin, X.; Li, Z.; Yang, G.; Yang, H.; Feng, H.; Xu, X.; Wang, J.; Li, X.; Luo, J. Winter wheat yield estimation based on multi-source medium resolution optical and radar imaging data and the AquaCrop model using the particle swarm optimization algorithm. ISPRS J. Photogramm. Remote Sens. 2017, 126, 24–37. [Google Scholar] [CrossRef]
- Jia, C.; Guo, H.; Yuan, K.; Yang, Q.; Sui, X.; Zhang, Y.; Fan, Q. Effects of different seeding manner on the seedling emergence, over-winter and yield of wheat under maize stalk full returned to the field. Chin. Agric. Sci. Bull. 2010, 26, 149–154. [Google Scholar]
- Schillinger, W.F.; Donaldson, E.; Allan, R.E.; Jones, S.S. Winter wheat seedling emergence from deep sowing depths. AGRON J. 1998, 90, 582–586. [Google Scholar] [CrossRef]
- Al-Mulla, Y.A.; Huggins, D.R.; Stöckle, C.O. Modeling the emergence of winter wheat in response to soil temperature, water potential, and planting depth. Trans. ASABE 2014, 57, 761–775. [Google Scholar]
- Lindstrom, M.J.; Papendick, R.I.; Koehler, F.E. A model to predict winter wheat emergence as affected by soil temperature, water potential, and depth of planting. Agron. J. 1976, 68, 137–141. [Google Scholar] [CrossRef]
- Sankaran, S.; Khot, L.R.; Carter, A.H. Field-based crop phenotyping: Multispectral aerial imaging for evaluation of winter wheat emergence and spring stand. Comput. Electron. Agric. 2015, 118, 372–379. [Google Scholar] [CrossRef]
- Senthilnath, J.; Dokania, A.; Kandukuri, M.; Ramesh, K.N.; Anand, G.; Omkar, S.N. Detection of tomatoes using spectral-spatial methods in remotely sensed RGB images captured by UAV. Biosyst. Eng. 2016, 146, 16–32. [Google Scholar] [CrossRef]
- Vega, F.A.; Ramírez, F.C.; Saiz, M.P.; Rosúa, F.O. Multi-temporal imaging using an unmanned aerial vehicle for monitoring a sunflower crop. Biosyst. Eng. 2015, 132, 19–27. [Google Scholar] [CrossRef]
- Primicerio, J.; Gennaro, S.F.D.; Fiorillo, E.; Genesio, L.; Lugato, E.; Matese, A.; Vaccari, F.P. A flexible unmanned aerial vehicle for precision agriculture. Precis. Agric. 2012, 13, 517–523. [Google Scholar] [CrossRef]
- Sugiura, R.; Tsuda, S.; Tamiya, S.; Itoh, A.; Nishiwaki, K.; Murakami, N.; Shibuya, Y.; Hirafuji, M.; Nuske, S. Field phenotyping system for the assessment of potato late blight resistance using RGB imagery from an unmanned aerial vehicle. Biosyst. Eng. 2016, 148, 1–10. [Google Scholar] [CrossRef]
- Tian, Z.; Fu, Y.; Liu, S.; Liu, F. Rapid crops classification based on UAV low-altitude remote sensing. Trans. Chin. Soc. Agric. Eng. 2013, 29, 109–116. [Google Scholar]
- Castaldi, F.; Pelosi, F.; Pascucci, S.; Casa, R. Assessing the potential of images from unmanned aerial vehicles (UAV) to support herbicide patch spraying in maize. Precis. Agric. 2016, 18, 76–94. [Google Scholar] [CrossRef]
- Li, Z.; Chen, Z.; Wang, L.; Liu, J.; Zhou, Q. Area extraction of maize lodging based on remote sensing by small unmanned aerial vehicle. Trans. Chin. Soc. Agric. Eng. 2014, 30, 207–213. [Google Scholar]
- Jin, X.; Liu, S.; Baret, F.; Hemerlé, M.; Comar, A. Estimates of plant density of wheat crops at emergence from very low altitude UAV imagery. Remote Sens. Environ. 2017, 198, 105–114. [Google Scholar] [CrossRef]
- Córcoles, J.I.; Ortega, J.F.; Hernández, D.; Moreno, M.A. Estimation of leaf area index in onion (Allium cepa L.) using an unmanned aerial vehicle. Biosyst. Eng. 2013, 115, 31–42. [Google Scholar] [CrossRef]
- Mathews, A.J.; Jensen, J.L.R. Visualizing and quantifying vineyard canopy LAI using an unmanned aerial vehicle (UAV) collected high density structure from motion point cloud. Remote Sens. 2013, 5, 2164–2183. [Google Scholar] [CrossRef]
- Meyer, G.E.; Neto, J.C. Verification of color vegetation indices for automated crop imaging applications. Comput. Electron. Agric. 2008, 63, 282–293. [Google Scholar] [CrossRef]
- Shan, C.G.; Liao, S.H.; Liu, B.; Wang, Z.F.; Dai, M.H.; Liu, M.; Wang, P. Study of measurement method of population uniformity of wheat based on digital image. J. Triticeae Crops 2008, 28, 819–823. [Google Scholar]
- Tayel, M.; Lightfoot, D.; Mansour, H. Effects of drip irrigation circuit design and lateral line lengths: I—On pressure and friction loss. Agric. Syst. 2012, 3, 551–560. [Google Scholar] [CrossRef]
- Joseph, K.D.S.M.; Alley, M.M.; Brann, D.E.; Gravelle, W.D. Row Spacing and Seeding Rate Effects on Yield and Yield Components of Soft Red Winter Wheat. Agron. J. 1985, 77, 211–214. [Google Scholar] [CrossRef]
- Zamanallah, M.; Vergara, O.; Araus, J.L.; Tarekegne, A.; Magorokosho, C.; Zarcotejada, P.J.; Hornero, A.; Albà, A.H.; Das, B.; Craufurd, P. Unmanned aerial platform-based multi-spectral imaging for field phenotyping of maize. Plant Methods 2015, 11. [Google Scholar] [CrossRef]
- Verger, A.; Vigneau, N.; Chéron, C.; Gilliot, J.M.; Comar, A.; Baret, F. Green area index from an unmanned aerial system over wheat and rapeseed crops. Remote Sens. Environ. 2014, 152, 654–664. [Google Scholar] [CrossRef]
- Bendig, J.; Yu, K.; Aasen, H.; Bolten, A.; Bennertz, S.; Broscheit, J.; Gnyp, M.L.; Bareth, G. Combining UAV-based plant height from crop surface models, visible, and near infrared vegetation indices for biomass monitoring in barley. Int. J. Appl. Earth Obs. Geoinf. 2015, 39, 79–87. [Google Scholar] [CrossRef]
- Díaz-Varela, R.A.; Rosa, R.D.L.; León, L.; Zarco-Tejada, P.J. High-Resolution Airborne UAV Imagery to Assess Olive Tree Crown Parameters Using 3D Photo Reconstruction: Application in Breeding Trials. Remote Sens. 2015, 7, 4213–4232. [Google Scholar] [CrossRef]
- Hunt, E.R.; Cavigelli, M.; Daughtry, C.S.T.; Mcmurtrey, J.E.; Walthall, C.L. Evaluation of Digital Photography from Model Aircraft for Remote Sensing of Crop Biomass and Nitrogen Status. Precis. Agric. 2005, 6, 359–378. [Google Scholar] [CrossRef]
- Zarcotejada, P.J.; Guilléncliment, M.L.; Hernándezclemente, R.; Catalina, A.; González, M.R.; Martín, P. Estimating leaf carotenoid content in vineyards using high resolution hyperspectral imagery acquired from an unmanned aerial vehicle (UAV). Agric. For. Meteorol. 2013, 171–172, 281–294. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Year | Sowing Date | Soil Characteristics (mg kg−1) |
|---|---|---|
| 2014 | 29 October | hydrolysable N: 112.23 |
| Available P: 45.61 | ||
| Available K: 137.16 | ||
| 2015 | 8 November | hydrolysable N: 99.86 |
| Available P: 39.12 | ||
| Available K: 106.55 |
| Sowing Patterns | Nb. Subsamples | Min | Max | Mean | Range | SD 1 |
|---|---|---|---|---|---|---|
| Broadcast | 120 | 0.67 | 5.2 | 2.64 | 4.53 | 0.99 |
| drill | 120 | 0.65 | 6.22 | 3.16 | 5.57 | 1.66 |
| Info. of MSR | Nb. Subsamples | Min | Max | Mean | Range | SD |
|---|---|---|---|---|---|---|
| Number | 30 | 6 | 40 | 22.27 | 34 | 9.67 |
| Length (cm) | 30 | 11 | 101 | 38.67 | 90 | 17.5 |
| Info. of MSR | Nb. Subsamples | Min | Max | Mean | Range | SD |
|---|---|---|---|---|---|---|
| Number | 30 | 0 | 17 | 5.2 | 17 | 4.2 |
| Area (m2) | 50 | 0.01 | 0.97 | 0.51 | 0.96 | 0.37 |
| Uniformity | Density (104 ha−1) | ||
|---|---|---|---|
| 180 | 240 | 300 | |
| >4 (U1) | 6800–7100 | 7400–7800 | 6900–7300 |
| 2–4 (U2) | 6100–7100 | 7100–7600 | 6200–7200 |
| <2 (U3) | 5500–6200 | 6000–6800 | 5400–6100 |
| MSRD (%) | Density (104 ha−1) | ||
|---|---|---|---|
| 180 | 240 | 300 | |
| <10 (L1) | 6900–7100 | 7500–7800 | 7200–7300 |
| 10–20 (L2) | 5900–7100 | 6500–7700 | 6000–7200 |
| >20 (L3) | 5800–6000 | 6000–6500 | 5600–5800 |
| MSRB (%) | Density (kg ha−1) | ||
|---|---|---|---|
| 180 | 240 | 300 | |
| <5 (A1) | 7000–7200 | 7300–7600 | 7100–7200 |
| 5–10 (A2) | 6100–6800 | 6400–7000 | 6200–6900 |
| >10 (A3) | 5500–6000 | 5700–6600 | 5500–5900 |
| U1 | U2 | U3 | |
|---|---|---|---|
| L1 | I | III | VI |
| L2 | II | IV | VIII |
| L3 | V | VII | IX |
| A1 | I | III | VI |
| A2 | II | IV | VIII |
| A3 | V | VII | IX |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, T.; Li, R.; Jin, X.; Ding, J.; Zhu, X.; Sun, C.; Guo, W. Evaluation of Seed Emergence Uniformity of Mechanically Sown Wheat with UAV RGB Imagery. Remote Sens. 2017, 9, 1241. https://doi.org/10.3390/rs9121241
Liu T, Li R, Jin X, Ding J, Zhu X, Sun C, Guo W. Evaluation of Seed Emergence Uniformity of Mechanically Sown Wheat with UAV RGB Imagery. Remote Sensing. 2017; 9(12):1241. https://doi.org/10.3390/rs9121241
Chicago/Turabian StyleLiu, Tao, Rui Li, Xiuliang Jin, Jinfeng Ding, Xinkai Zhu, Chengming Sun, and Wenshan Guo. 2017. "Evaluation of Seed Emergence Uniformity of Mechanically Sown Wheat with UAV RGB Imagery" Remote Sensing 9, no. 12: 1241. https://doi.org/10.3390/rs9121241
APA StyleLiu, T., Li, R., Jin, X., Ding, J., Zhu, X., Sun, C., & Guo, W. (2017). Evaluation of Seed Emergence Uniformity of Mechanically Sown Wheat with UAV RGB Imagery. Remote Sensing, 9(12), 1241. https://doi.org/10.3390/rs9121241