Measuring Vegetation Height in Linear Disturbances in the Boreal Forest with UAV Photogrammetry




Abstract
:1. Introduction
- (1)
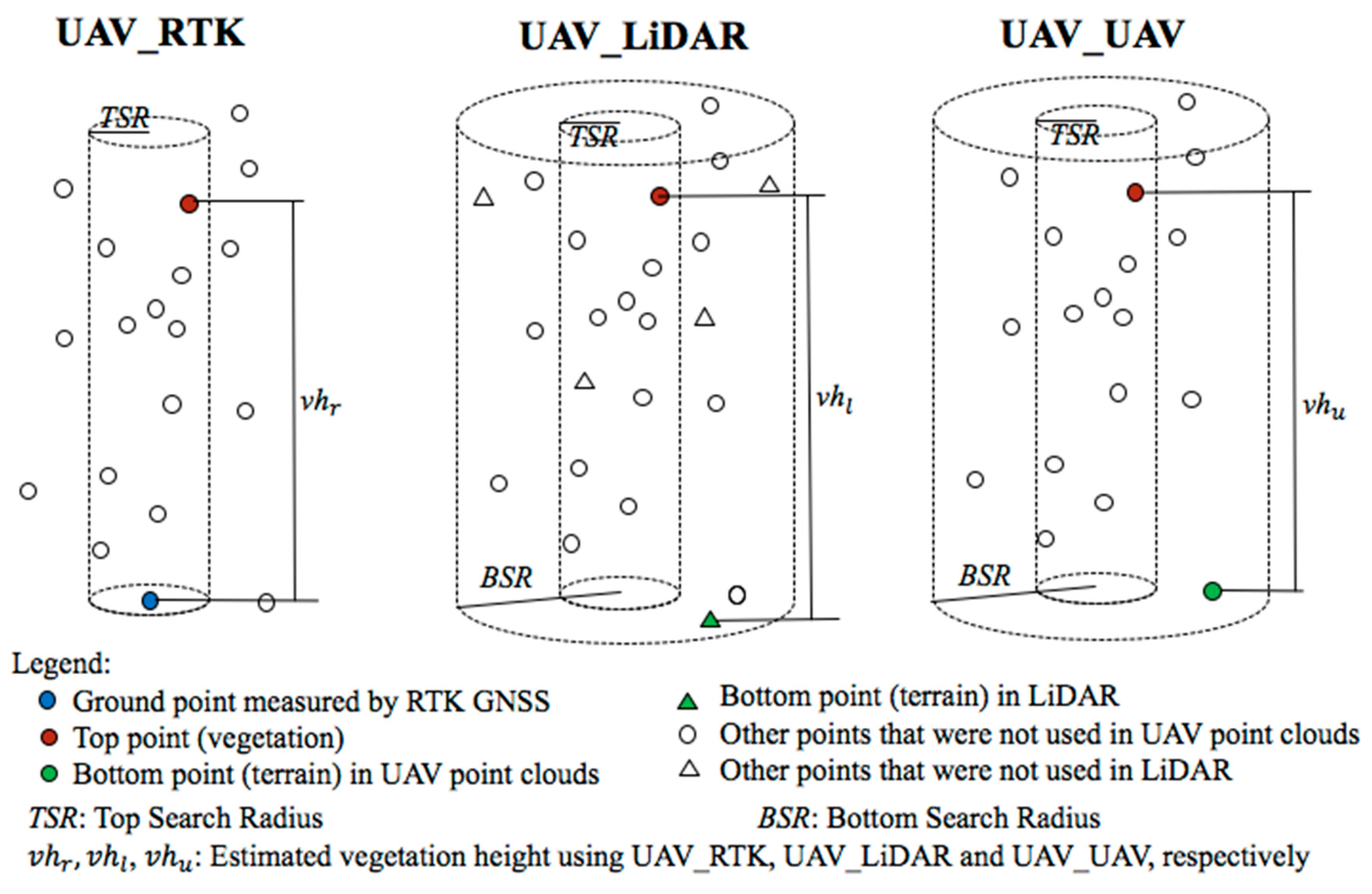
- UAV_RTK, where point clouds are normalized using terrain elevation measured with a survey-grade real-time kinematic (RTK) global navigation satellite system (GNSS) receiver in the field;
- (2)
- UAV_LiDAR, where photogrammetric point clouds are normalized using spatially coincident pre-existing LiDAR data; and
- (3)
- UAV_UAV, where terrain elevation is estimated from the UAV photogrammetry data alone.
2. Materials and Methods
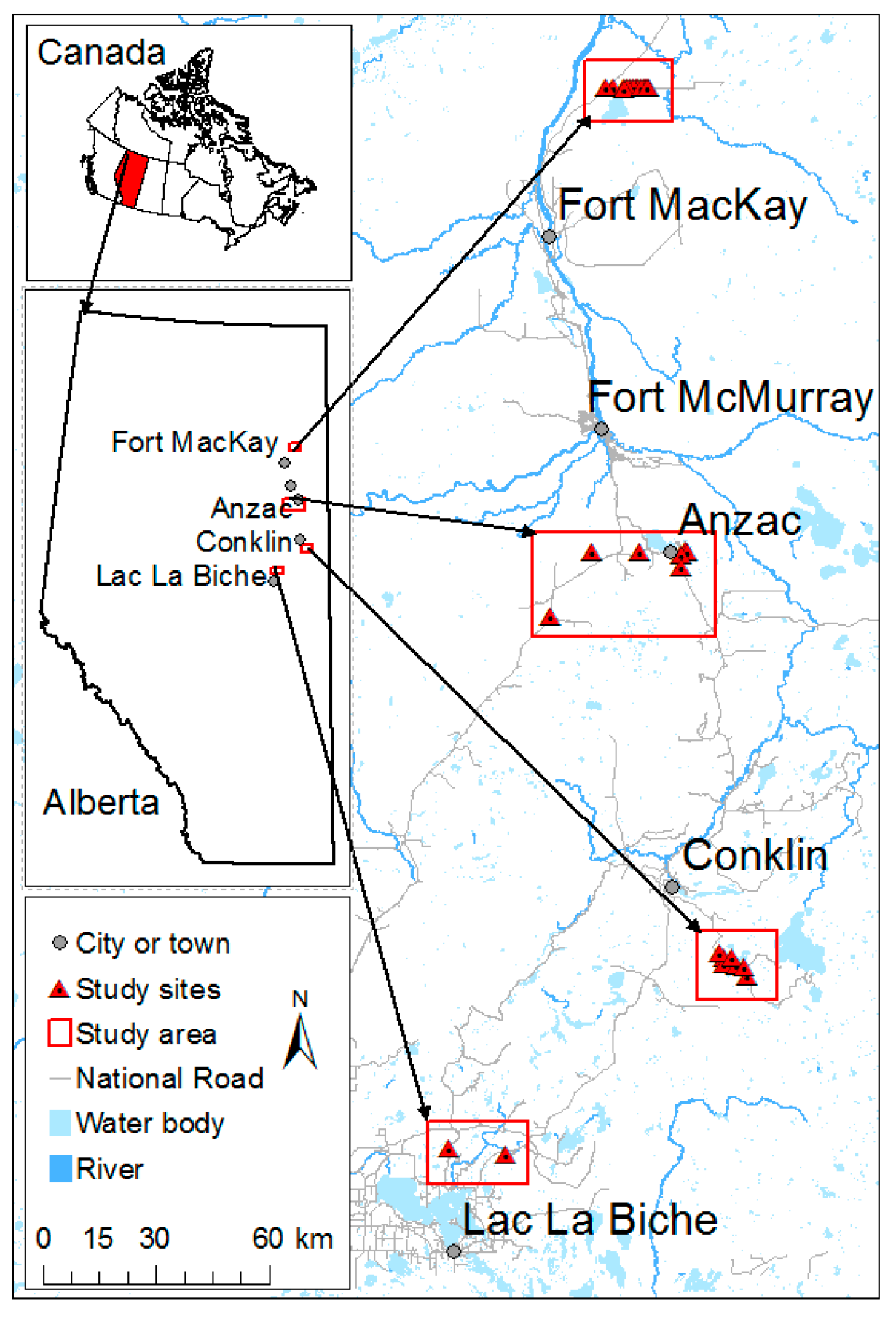
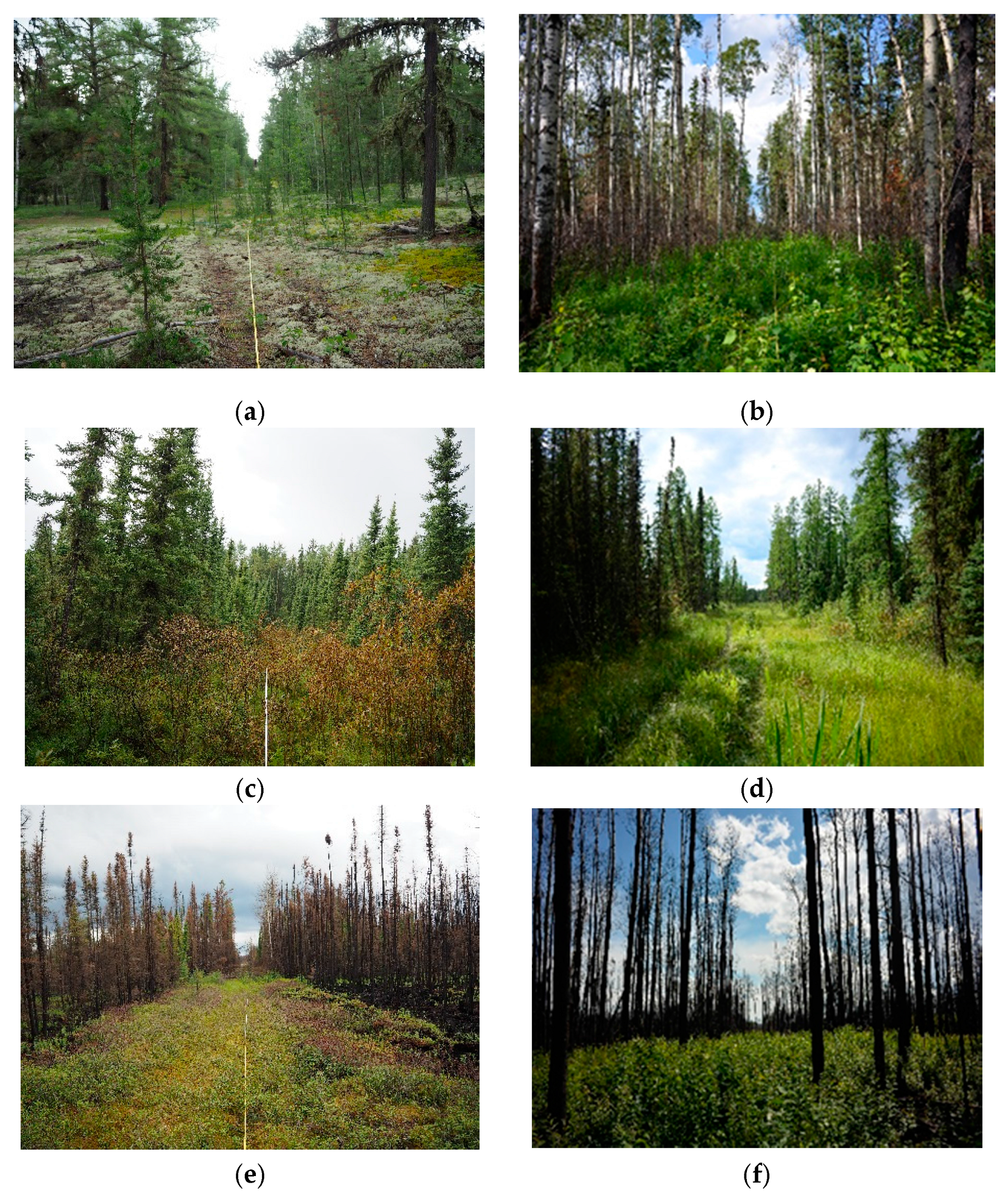
2.1. Study Area
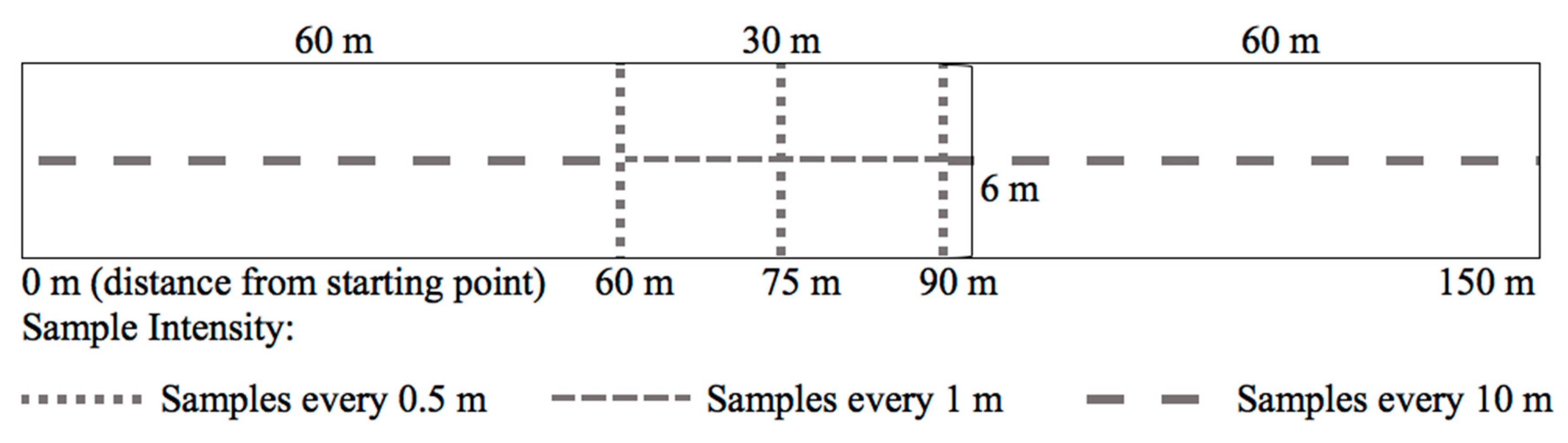
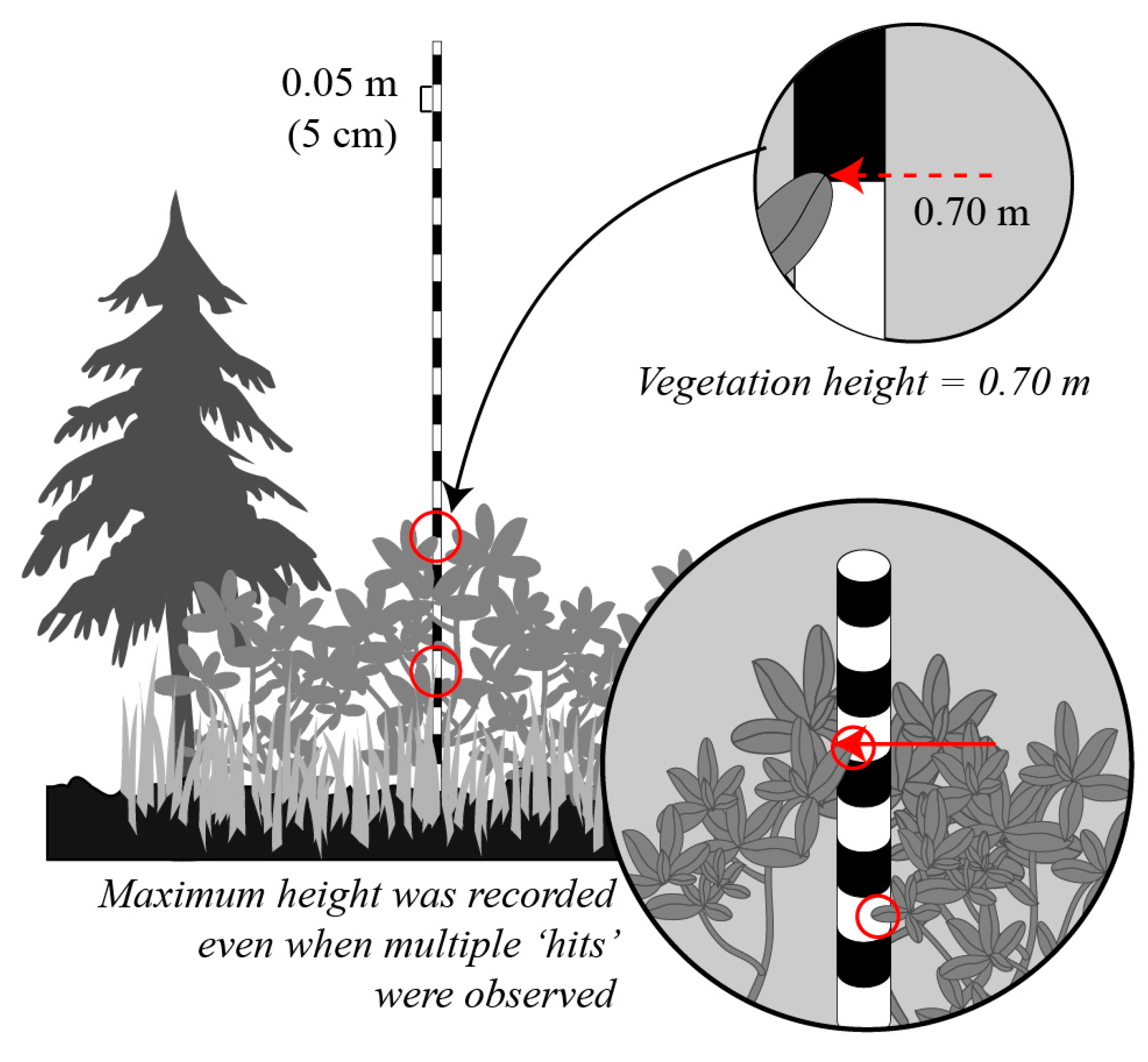
2.2. Field Measurements
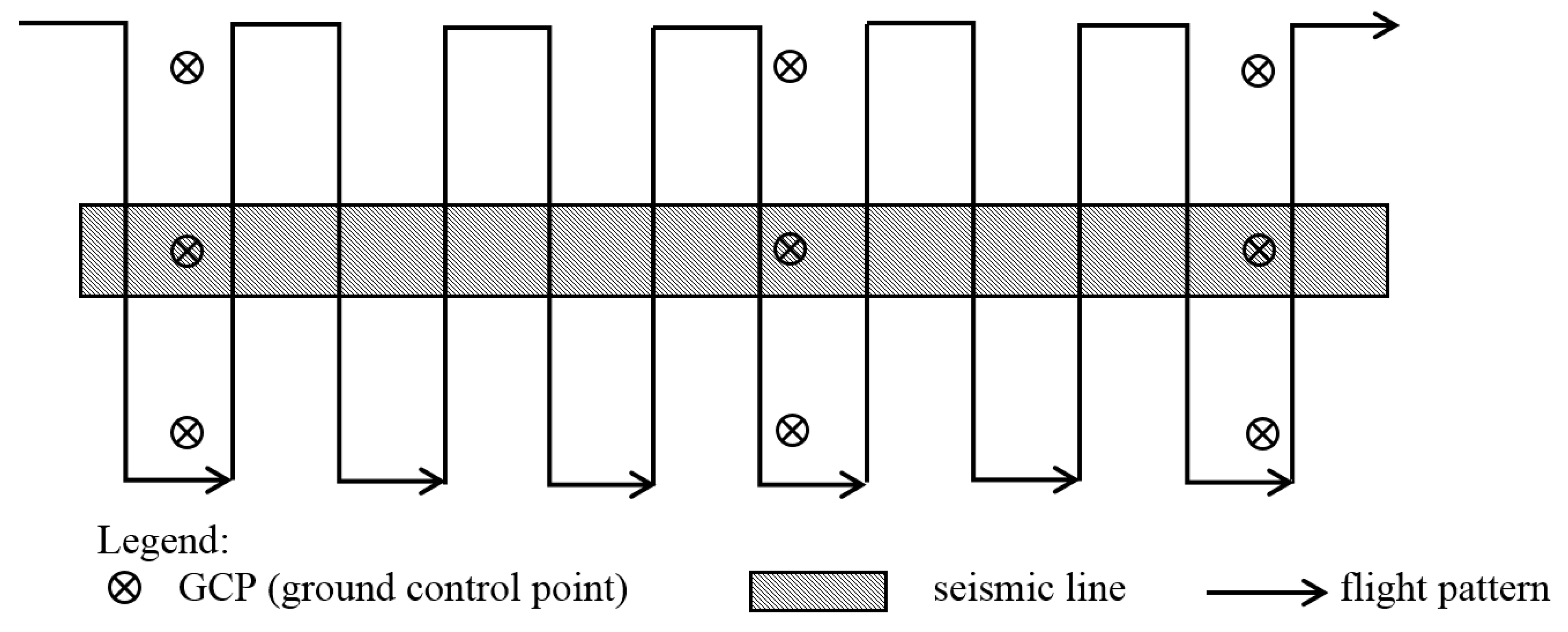
2.3. UAV Imagery Acquisition
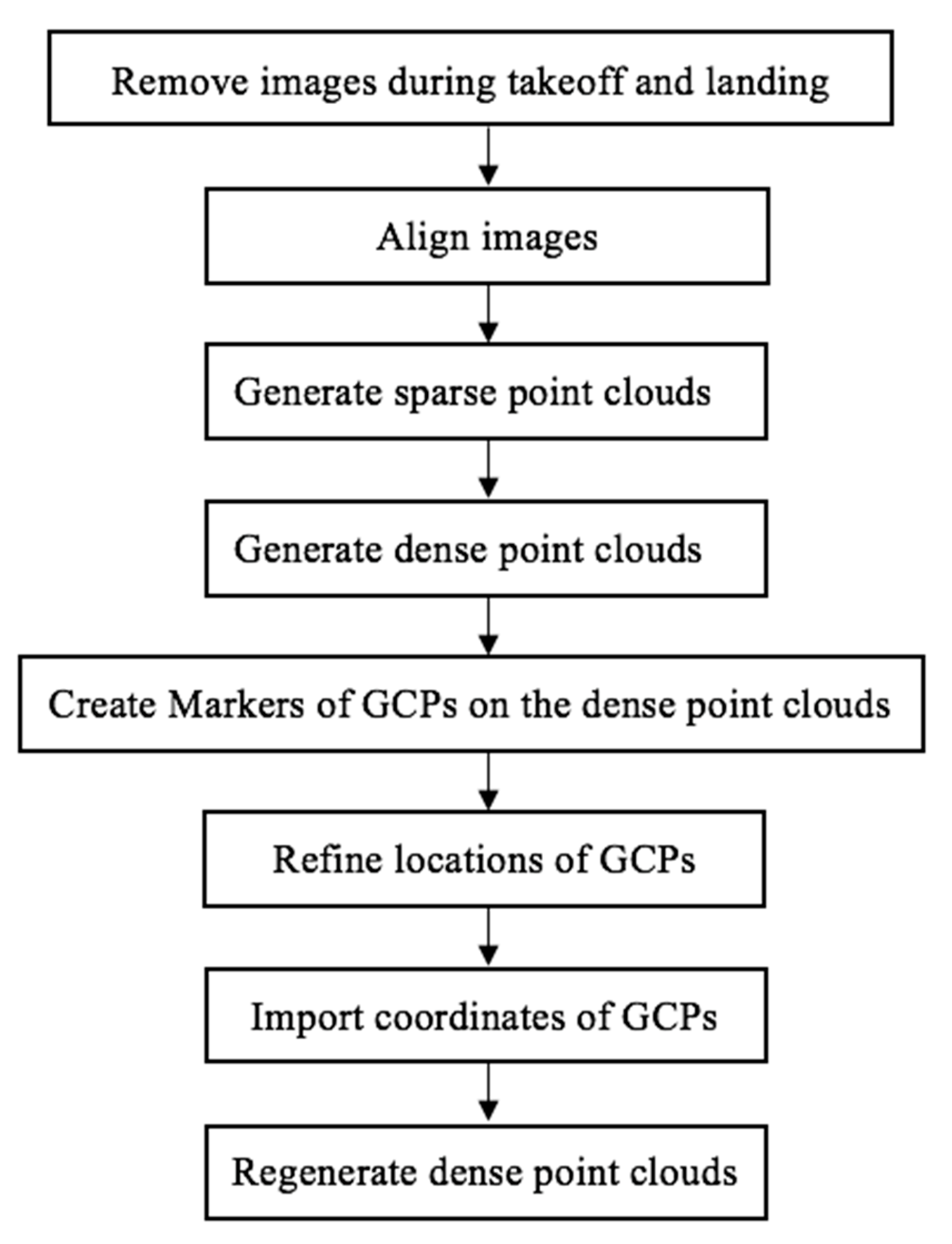
2.4. Generation and Geo-Reference of Point Clouds
2.5. LiDAR Data
2.6. Vegetation-Height Estimates
2.7. Comparison and Accuracy Assessment
2.8. Cost Analysis
- (1)
- Traditional vegetation surveys. In this scenario, field crews perform traditional vegetation surveys in the field. Each plot takes 2 h for the survey plus 1 h between plots. Therefore, 30 plots take 90 h to complete, the equivalent of 9 days in the field. With the two additional travel days, the survey takes a total of 11 days.
- (2)
- UAV photogrammetry surveys with supplementary LiDAR. The UAV_LiDAR method is equivalent to having a LiDAR-derived digital terrain model (DTM) with 1-m pixel size, which would be a cheaper source of terrain elevation than the LiDAR point cloud used in our study. If we assume that the 30 sites are all located within a single township within Alberta, the project could purchase a DTM derived from pre-existing LiDAR for this township for $100 [40], although the costs would be exponentially higher if no such high-quality data existed. The total equipment costs for this scenario are $1500 for the UAV, $9000 for the RTK GNSS, $500 for the camera, and $100 for accessories. However, this cost would be shared by other projects undertaken by the company. To estimate the equipment cost per day of fieldwork, we assume that the equipment becomes obsolete in 5 years and is used in 40 days of fieldwork per year, which yields a cost per field-day of $55.50. Each plot takes 1 h for UAV flight and GCP measurement, plus 1 h between plots. Therefore, 30 sites take a total of 60 h, equivalent to 6 days for the fieldwork, plus 2 days for outbound and inbound travel. This scenario also involves post-processing through Agisoft PhotoScan Professional Edition software, with a license cost of $5000/year. If we assume that this software will be used for five projects per year, then the software cost is $1000 per project. The data processing procedure includes aligning photos, generating point clouds, refining GCP locations, re-generating point clouds, and estimating vegetation parameters, all of which (except for refining GCP locations) are automatic and do not produce labor costs. Manually refining GCP locations, loading the data, and organizing outputs would take about 2 days of office work, at a total cost of $800.
- (3)
- Stand-alone UAV photogrammetry surveys. In practice, detailed geo-referencing of point clouds can be skipped with the UAV_UAV method, because vegetation parameters can be computed in a relative space. That is, we can first generate a point cloud for a seismic line segment from the UAV photos corresponding to the segment, then clip the point cloud by a polygon representing the line segment using the orthophoto generated by the SfM software, and then apply the UAV_UAV method to each point of say a 1-m grid overlapping the polygon, and average the vegetation height of those points. Hence, in a scenario where repeated measurements are not sought after, geo-referencing is not necessary. Therefore, we assume that no GCPs are required in this scenario, and RTK GNSS equipment is therefore not needed. The total equipment costs are therefore $1500 for the UAV, $500 for the camera, and $100 for accessories. Assuming that the equipment is used for a minimum of 40 days of fieldwork per year for 5 years, the equipment cost per field-day is $10.50. Each plot takes 0.3 h for the UAV flight, plus 1 h between plots. Therefore, 30 sites take 39 h, equivalent to 4 field days, plus 2 days for travel. The survey takes a total of 6 days, with costs of $9000 for data collection and $63 for equipment. The cost of software is $1000. Regarding data processing, the difference between the UAV_UAV and UAV_LiDAR methods is that the process of refining GCP locations and re-generating point clouds is unnecessary for UAV_UAV. Therefore, loading the data and organizing outputs would take about 1 day of office work, at a cost of $400.
3. Results
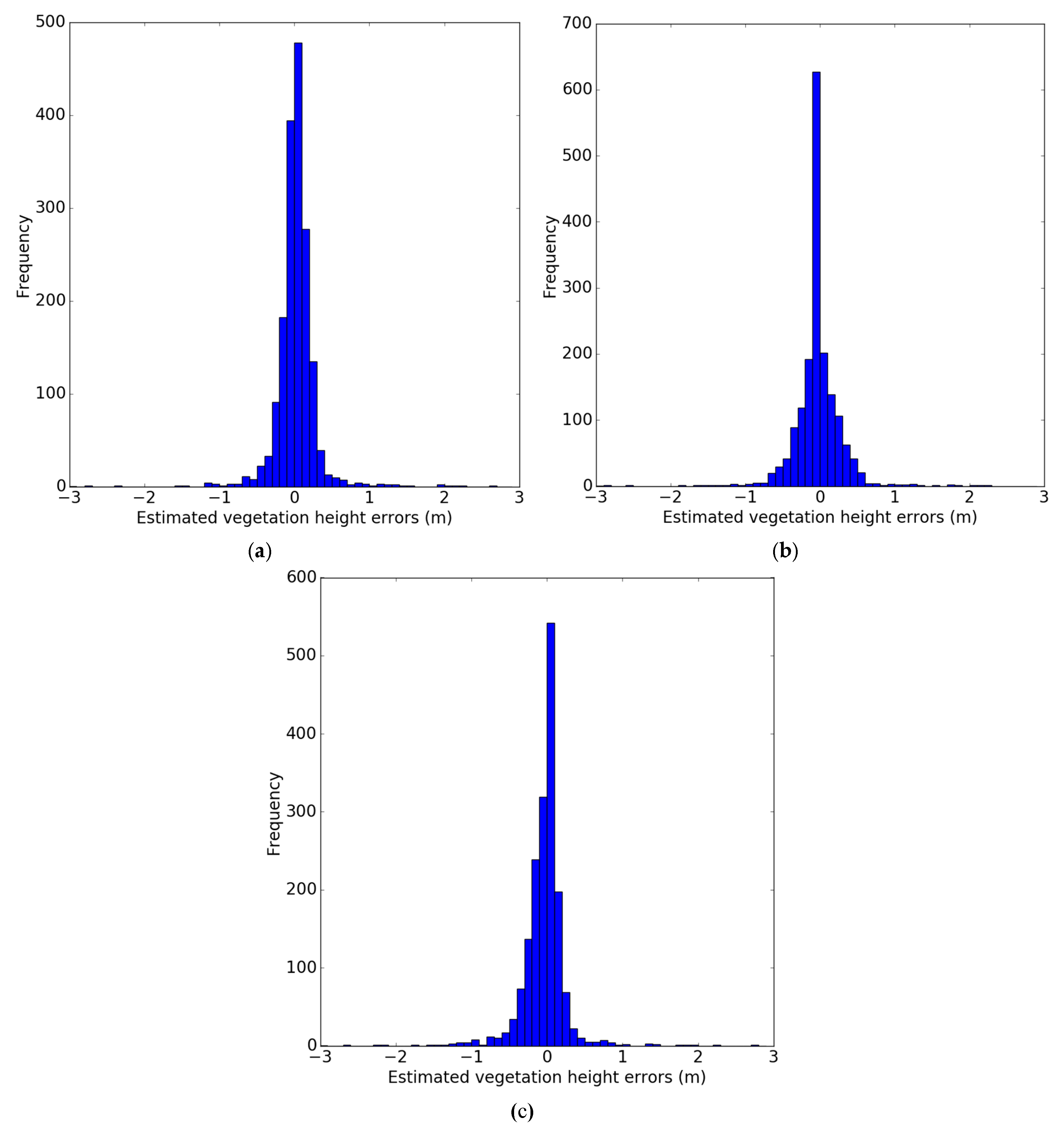
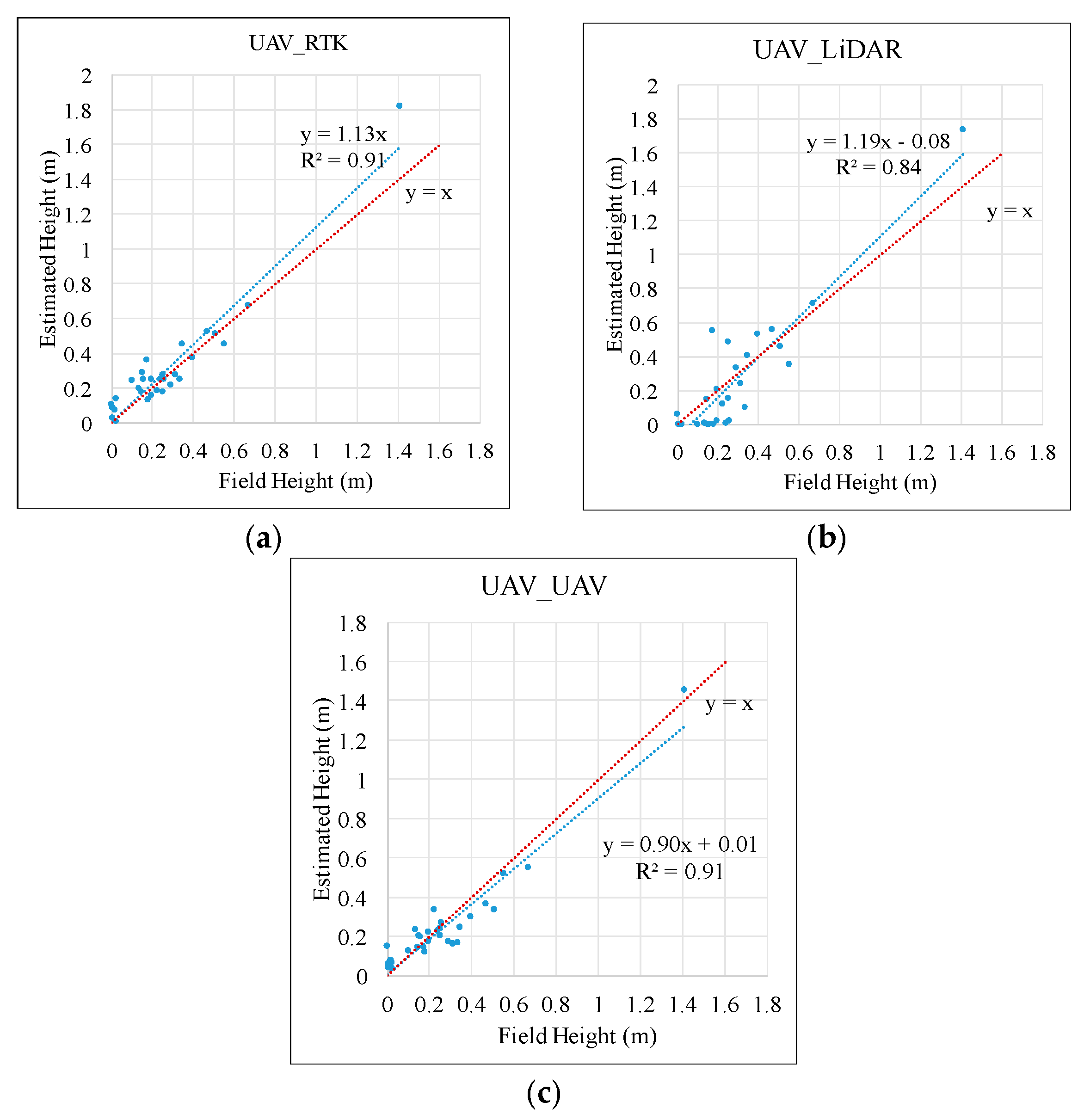
3.1. Estimated Vegetation Height at the Point Level
3.2. Estimated Mean Vegetation Height at the Site Level
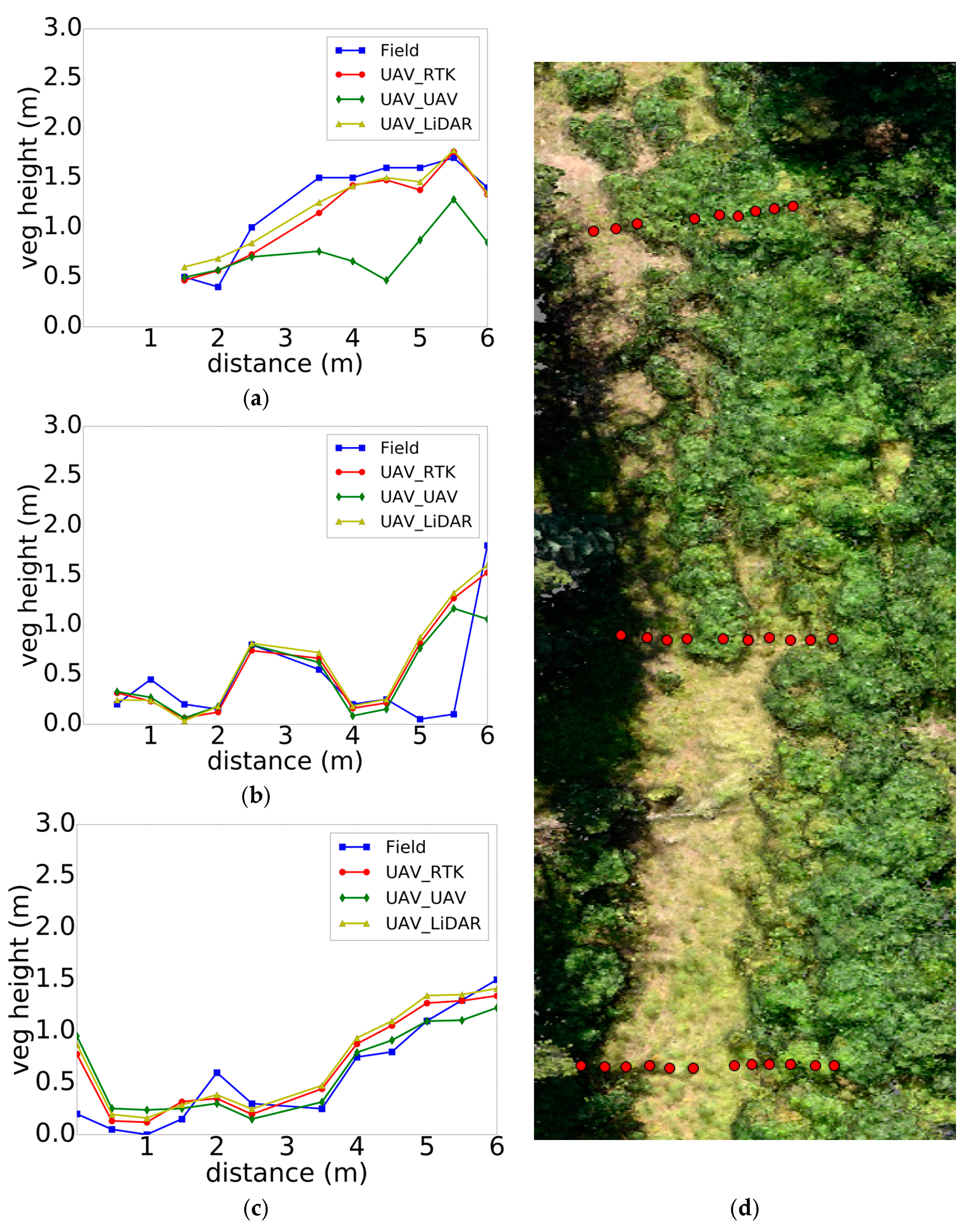
3.3. Profile Comparisons
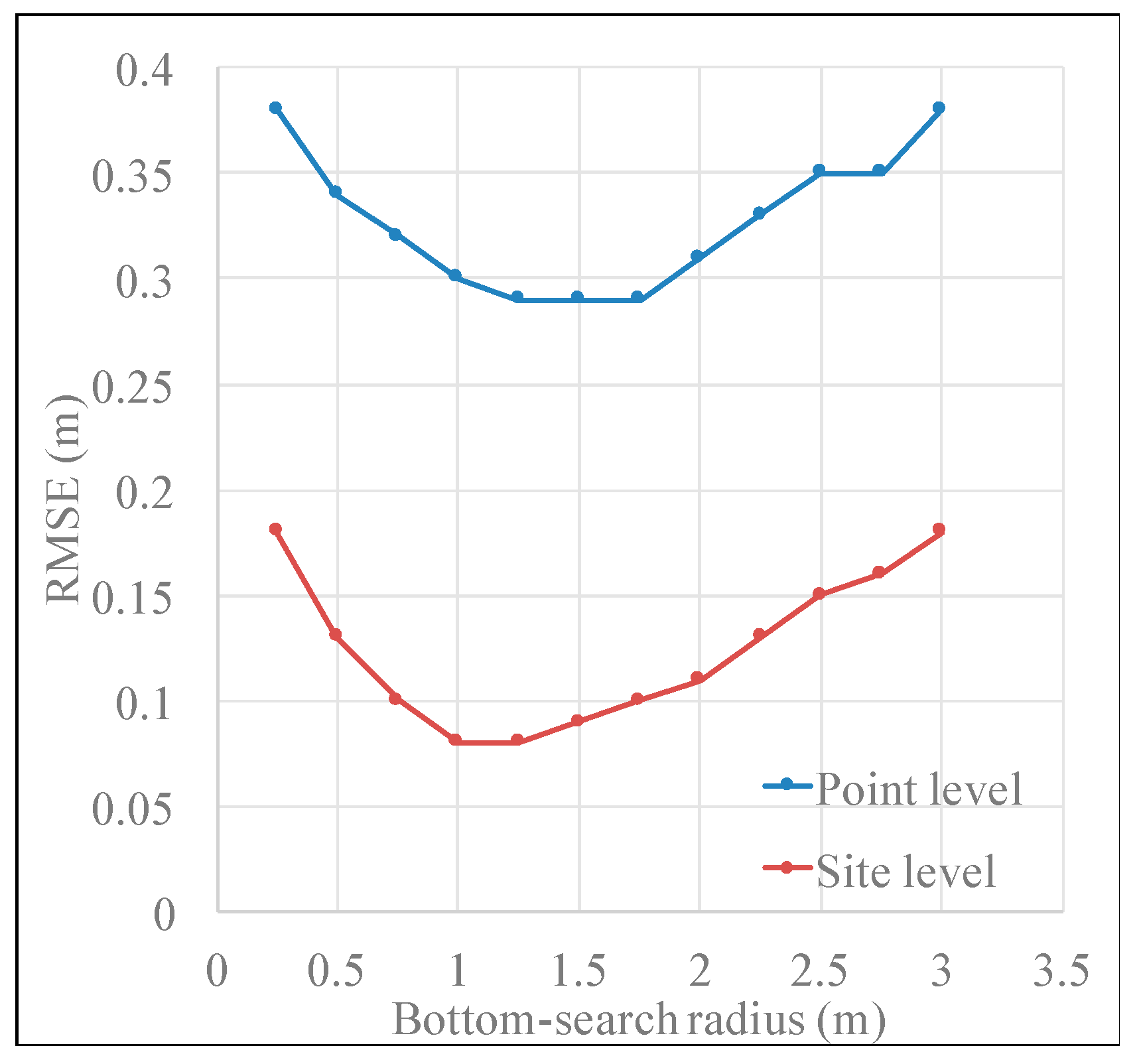
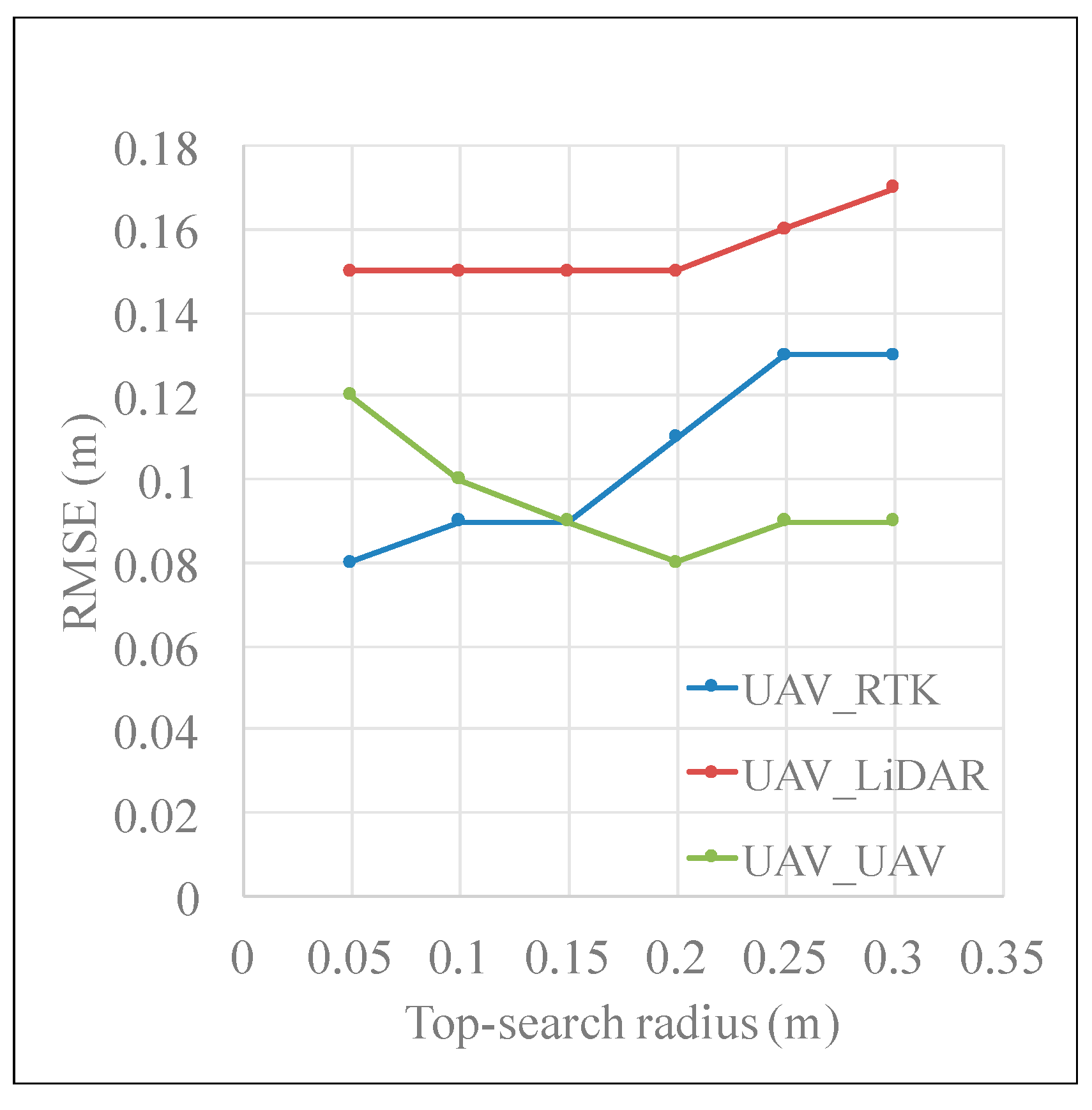
3.4. Optimal Search Radius for Lowest and Highest UAV Height Values around Sample Points
3.5. Cost Analysis
4. Discussion
5. Conclusions
Supplementary Materials
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Festa-Bianchet, M.; Ray, J.C.; Boutin, S.; Côté, S.D.; Gunn, A. Conservation of caribou (Rangifer tarandus) in Canada: An uncertain future. Can. J. Zool. 2011, 89, 419–434. [Google Scholar] [CrossRef]
- Environment and Climate Change Canada. Report on the Progress of Recovery Strategy Implementation for the Woodland Caribou (Rangifer tarandus caribou), Boreal population in Canada for the Period 2012–2017. Species at Risk Act Recovery Strategy Series; Environment and Climate Change Canada: Ottawa, ON, Canada, 2017.
- Salmo Consulting Inc.; Athabasca Landscape Team. Athabasca Caribou Landscape Management Options Report, Alberta Caribou Committee Governance Board: Edmonton, AB, Canada, 2009.
- Ritchie, C.; George, P. Boreal Caribou Habitat Restoration; Government of British Columbia: Victoria, BC, Canada, 2012.
- Pyper, M.; Nishi, J.; McNeil, L. Linear Feature Restoration in Caribou Habitat: A Summary of Current Practices and a Roadmap for Future Programs; Fuse Consulting: Calgary, AB, Canada, 2014. [Google Scholar]
- Latham, A.D.M.; Latham, M.C.; Knopff, K.H.; Hebblewhite, M.; Boutin, S. Wolves, white-tailed deer, and beaver: Implications of seasonal prey switching for woodland caribou declines. Ecography 2013, 36, 1276–1290. [Google Scholar] [CrossRef]
- Latham, A.D.M.; Latham, M.C.; Boyce, M.S.; Boutin, S. Movement responses by wolves to industrial linear features and their effect on woodland caribou in northeastern Alberta. Ecol. Appl. 2011, 21, 2854–2865. [Google Scholar] [CrossRef]
- Van Rensen, C.K.; Nielsen, S.E.; White, B.; Vinge, T.; Lieffers, V.J. Natural regeneration of forest vegetation on legacy seismic lines in boreal habitats in Alberta’s oil sands region. Biol. Conserv. 2015, 184, 127–135. [Google Scholar] [CrossRef]
- Dickie, M.; Serrouya, R.; Demars, C.; Cranston, J.; Boutin, S. Evaluating functional recovery of habitat for threatened woodland caribou. Ecosphere 2017, 9. [Google Scholar] [CrossRef]
- Golder Associates Ltd. Caribou Habitat Restoration Pilot Study. Submitted to: ConocoPhillips Canada, Suncor Energy, and the Canadian Association of Petroleum Producers; Golder Associates Ltd.: Hong Kong, China, 2009. [Google Scholar]
- Alberta Government. Alberta Timber Harvest Planning and Operating Ground Rules Framework for Renewal; Government of Alberta: Edmonton, AB, Canada, 2016.
- Magnussen, S.; Russo, G. Uncertainty in photo-interpreted forest inventory variables and effects on estimates of error in Canada’s National Forest Inventory. For. Chron. 2012, 88, 439–447. [Google Scholar] [CrossRef]
- Lefsky, M.A. A global forest canopy height map from the Moderate Resolution Imaging Spectroradiometer and the Geoscience Laser Altimeter System. Geophys. Res. Lett. 2010, 37. [Google Scholar] [CrossRef]
- McRoberts, R.E.; Cohen, W.B.; Næsset, E.; Stehman, S.V.; Tomppo, E.O. Using remotely sensed data to construct and assess forest attribute maps and related spatial products. Scand. J. For. Res. 2010, 25, 340–367. [Google Scholar] [CrossRef]
- Weber, T.C.; Boss, D.E. Use of LiDAR and supplemental data to estimate forest maturity in Charles County, MD, USA. For. Ecol. Manag. 2009, 258, 2068–2075. [Google Scholar] [CrossRef]
- Persson, H.J.; Perko, R. Assessment of boreal forest height from WorldView-2 satellite stereo images. Remote Sens. Lett. 2016, 7, 1150–1159. [Google Scholar] [CrossRef]
- Pan, Y.; Birdsey, R.A.; Phillips, O.L.; Jackson, R.B. The structure, distribution, and biomass of the world’s forests. Annu. Rev. Ecol. Evol. Syst. 2013, 44, 593–622. [Google Scholar] [CrossRef]
- Bouvier, M.; Durrieu, S.; Fournier, R.A.; Renaud, J.-P. Generalizing predictive models of forest inventory attributes using an area-based approach with airborne LiDAR data. Remote Sens. Environ. 2015, 156, 322–334. [Google Scholar] [CrossRef]
- Breidenbach, J.; Nothdurft, A.; Kändler, G. Comparison of nearest neighbour approaches for small area estimation of tree species-specific forest inventory attributes in central Europe using airborne laser scanner data. Eur. J. For. Res. 2010, 129, 833–846. [Google Scholar] [CrossRef]
- Estornell, J.; Ruiz, L.A.; Velázquez-Martí, B.; Fernández-Sarría, A. Estimation of shrub biomass by airborne LiDAR data in small forest stands. For. Ecol. Manag. 2011, 262, 1697–1703. [Google Scholar] [CrossRef]
- Vastaranta, M.; Holopainen, M.; Yu, X.; Hyyppä, J.; Hyyppä, H.; Viitala, R. Predicting stand-thinning maturity from airborne laser scanning data. Scand. J. For. Res. 2011, 26, 187–196. [Google Scholar] [CrossRef]
- Whitehead, K.; Hugenholtz, C.H.; Myshak, S.; Brown, O.; LeClair, A.; Tamminga, A.; Barchyn, T.E.; Moorman, B.; Eaton, B. Remote sensing of the environment with small unmanned aircraft systems (UASs), part 2: Scientific and commercial applications 1. J. Unmanned Veh. Syst. 2014, 2, 86–102. [Google Scholar] [CrossRef]
- Lisein, J.; Pierrot-Deseilligny, M.; Bonnet, S.; Lejeune, P. A photogrammetric workflow for the creation of a forest canopy height model from small unmanned aerial system imagery. Forests 2013, 4, 922–944. [Google Scholar] [CrossRef]
- Hardin, P.J.; Jensen, R.R. Small-scale unmanned aerial vehicles in environmental remote sensing: Challenges and opportunities. GISci. Remote Sens. 2011, 48, 99–111. [Google Scholar] [CrossRef]
- Dandois, J.P.; Ellis, E.C. Remote sensing of vegetation structure using computer vision. Remote Sens. 2010, 2, 1157–1176. [Google Scholar] [CrossRef]
- Järnstedt, J.; Pekkarinen, A.; Tuominen, S.; Ginzler, C.; Holopainen, M.; Viitala, R. Forest variable estimation using a high-resolution digital surface model. ISPRS J. Photogramm. Remote Sens. 2012, 74, 78–84. [Google Scholar] [CrossRef]
- Puliti, S.; Ørka, H.O.; Gobakken, T.; Næsset, E. Inventory of small forest areas using an unmanned aerial system. Remote Sens. 2015, 7, 9632–9654. [Google Scholar] [CrossRef] [Green Version]
- White, J.C.; Wulder, M.A.; Vastaranta, M.; Coops, N.C.; Pitt, D.; Woods, M. The utility of image-based point clouds for forest inventory: A comparison with airborne laser scanning. Forests 2013, 4, 518–536. [Google Scholar] [CrossRef]
- Dandois, J.P.; Ellis, E.C. High spatial resolution three-dimensional mapping of vegetation spectral dynamics using computer vision. Remote Sens. Environ. 2013, 136, 259–276. [Google Scholar] [CrossRef]
- Whitehead, K.; Hugenholtz, C.H.; Myshak, S.; Brown, O.; LeClair, A.; Tamminga, A.; Barchyn, T.E.; Moorman, B.; Eaton, B. Remote sensing of the environment with small unmanned aircraft systems (UASs), part 1: A review of progress and challenges. J. Unmanned Veh. Syst. 2014, 2, 86–102. [Google Scholar] [CrossRef]
- Vastaranta, M.; Wulder, M.A.; White, J.C.; Pekkarinen, A.; Tuominen, S.; Ginzler, C.; Kankare, V.; Holopainen, M.; Hyyppä, J.; Hyyppä, H. Airborne laser scanning and digital stereo imagery measures of forest structure: Comparative results and implications to forest mapping and inventory update. Can. J. Remote Sens. 2013, 39, 382–395. [Google Scholar] [CrossRef]
- Natural Regions Committee. Natural Regions and Subregions of Alberta; Downing, D.J.; Pettapiece, W.W. (Compiler) Publ. No. T/852; Government of Alberta: Edmonton, AB, Canada, 2006.
- Donahue, B.; Wentzel, J.; Berg, R. Guidelines for RTK/RTN GNSS Surveying in Canada; Version 1.1; Natural Resources Canada: Ottawa, ON, Canada, 2013.
- Hird, J.N.; Nielsen, S.; McDermid, G.; Tan, T. BERA Project: Baseline Field Data Collection Protocols, Version 2016-07-15; Boreal Ecosystem Recovery and Assessment (BERA): Calgary, AB, Canada, 2016. [Google Scholar]
- Agisoft. Agisoft Photoscan User Manual. Available online: http://www.agisoft.com/pdf/photoscan-pro_1_2_en.pdf (accessed on 2 December 2017).
- Schenk, T. Section 6.2: Digital phogrammetric workstations. In Introduction to Photogrammetry; Ohio State University, Department of Civil and Environmental Enginering and Geodetic Science: Columbus, OH, USA, 2005; pp. 79–95. [Google Scholar]
- Westoby, M.J.; Brasington, J.; Glasser, N.F.; Hambrey, M.J.; Reynolds, J.M. “Structure-from-Motion” photogrammetry: A low-cost, effective tool for geoscience applications. Geomorphology 2012, 179, 300–314. [Google Scholar] [CrossRef] [Green Version]
- Triggs, B.; McLauchlan, P.F.; Hartley, R.I.; Fitzgibbon, A.W. Bundle Adjustment—A Modern Synthesis. In Vision Algorithms: Theory and Practice, Proceedings of the International Workshop on Vision Algorithms, Corfu, Greece, 21–22 Septem 2000; Lecture Notes in Computer Science; Triggs, B., Zisserman, A., Szeliski, R., Eds.; Springer: Berlin/Heidelberg, Germany, 2000; Volume 1883. [Google Scholar]
- Isenburg, M. LAStools—Efficient Tools for LiDAR Processing. 2013. Available online: http://lastools.org (accessed on 2 December 2017).
- AltaLIS. LiDAR15 DEM. Available online: http://www.altalis.com/products/terrain/lidar15_dem.html (accessed on 2 December 2017).
- Hird, J.N.; Montaghi, A.; McDermid, G.J.; Kariyeva, J.; Moorman, B.J.; Nielsen, S.E.; McIntosh, A.C.S. Use of unmanned aerial vehicles for monitoring recovery of forest vegetation on petroleum well sites. Remote Sens. 2017, 9. [Google Scholar] [CrossRef]
- White, J.C.; Stepper, C.; Tompalski, P.; Coops, N.C.; Wulder, M.A. Comparing ALS and image-based point cloud metrics and modelled forest inventory attributes in a complex coastal forest environment. Forests 2015, 6, 3704–3732. [Google Scholar] [CrossRef]
- Maltamo, M.; Bollandsås, O.; Næsset, E.; Gobakken, T.; Packalén, P.; Bollandsås, O.M.; Næsset, E.; Gobakken, T.; Packalén, P. Different plot selection strategies for field training data in ALS-assisted forest inventory. Forestry 2011, 84, 23–31. [Google Scholar] [CrossRef]
- Jensen, J.L.R.; Mathews, A.J. Assessment of image-based point cloud products to generate a bare earth surface and estimate canopy heights in a woodland ecosystem. Remote Sens. 2016, 8. [Google Scholar] [CrossRef]
- Goodbody, T.R.H.; Coops, N.C.; Marshall, P.L.; Tompalski, P.; Crawford, P. Unmanned aerial systems for precision forest inventory purposes: A review and case study. For. Chron. 2017, 93, 71–81. [Google Scholar] [CrossRef]
- Zahawi, R.A.; Dandois, J.P.; Holl, K.D.; Nadwodny, D.; Reid, J.L.; Ellis, E.C. Using lightweight unmanned aerial vehicles to monitor tropical forest recovery. Biol. Conserv. 2015, 186, 287–295. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Study Area 1 | Site ID | Sample Size | Mean Height (m) | Maximum Height (m) | Minimum Height (m) | Range (m) | Standard Deviation (m) |
|---|---|---|---|---|---|---|---|
| FMK | 201 | 43 | 0.15 | 0.6 | 0 | 0.6 | 0.18 |
| FMK | 202 | 43 | 0.03 | 0.5 | 0 | 0.5 | 0.09 |
| FMK | 203 | 43 | 0.10 | 0.5 | 0 | 0.5 | 0.14 |
| FMK | 204 | 42 | 0.18 | 1.2 | 0 | 1.2 | 0.29 |
| FMK | 205 | 43 | 0.02 | 0.25 | 0 | 0.25 | 0.05 |
| FMK | 218 | 37 | 0.00 | 0.05 | 0 | 0.05 | 0.01 |
| FMK | 219 | 43 | 0.01 | 0.1 | 0 | 0.1 | 0.02 |
| FMK | 227 | 43 | 0.01 | 0.1 | 0 | 0.1 | 0.02 |
| FMK | 235 | 43 | 0.24 | 1.85 | 0 | 1.85 | 0.38 |
| FMK | 239 | 43 | 0.16 | 0.7 | 0 | 0.7 | 0.18 |
| FMK | 246 | 43 | 0.14 | 0.7 | 0 | 0.7 | 0.22 |
| FMK | 247 | 43 | 0.20 | 2.3 | 0 | 2.3 | 0.39 |
| FMK | 248 | 43 | 0.26 | 1.2 | 0 | 1.2 | 0.23 |
| FMK | 298 | 43 | 0.02 | 0.5 | 0 | 0.5 | 0.09 |
| LLB | 301 | 47 | 1.44 | 2.9 | 0 | 2.9 | 0.99 |
| LLB | 305 | 65 | 0.22 | 2.95 | 0 | 2.95 | 0.63 |
| ANZ | 306 | 78 | 0.25 | 0.6 | 0 | 0.6 | 0.15 |
| ANZ | 307 | 78 | 0.47 | 1.4 | 0.05 | 1.35 | 0.25 |
| ANZ | 308 | 79 | 0.32 | 1.4 | 0 | 1.4 | 0.27 |
| ANZ | 309 | 73 | 0.67 | 2 | 0 | 2 | 0.53 |
| ANZ | 310 | 45 | 0.38 | 1.9 | 0 | 1.9 | 0.39 |
| ANZ | 311 | 75 | 0.18 | 1.5 | 0 | 1.5 | 0.29 |
| ANZ | 312 | 73 | 0.19 | 1.2 | 0 | 1.2 | 0.18 |
| CNK | 314 | 78 | 0.15 | 0.8 | 0 | 0.8 | 0.13 |
| CNK | 315 | 77 | 0.33 | 2.9 | 0.05 | 2.85 | 0.32 |
| CNK | 316 | 66 | 0.56 | 2.4 | 0.05 | 2.35 | 0.46 |
| CNK | 317 | 79 | 0.26 | 0.75 | 0 | 0.75 | 0.16 |
| CNK | 318 | 78 | 0.34 | 0.95 | 0 | 0.95 | 0.19 |
| CNK | 320 | 79 | 0.40 | 2.35 | 0 | 2.35 | 0.33 |
| CNK | 321 | 78 | 0.51 | 1.2 | 0.1 | 1.1 | 0.20 |
| All | NA | 1743 | 0.30 | 2.95 | 0 | 2.95 | 0.42 |
| Variable 1 | Method | RMSE (m) | nRMSE (%) | Bias | Pearson’s r | p Value 2 |
|---|---|---|---|---|---|---|
| UAV_RTK | 0.28 | 5 | 0.02 | 0.76 | 0.001 | |
| UAV_LiDAR | 0.31 | 5 | −0.02 | 0.72 | 0.02 | |
| UAV_UAV | 0.30 | 5 | −0.04 | 0.70 | <0.001 | |
| UAV_RTK | 0.22 | 7 | 0.07 | 0.39 | <0.001 | |
| UAV_LiDAR | 0.24 | 8 | 0.03 | 0.38 | <0.001 | |
| UAV_UAV | 0.20 | 6 | 0.03 | 0.33 | <0.001 | |
| UAV_RTK | 0.40 | 11 | −0.14 | 0.55 | <0.001 | |
| UAV_LiDAR | 0.45 | 12 | −0.20 | 0.54 | <0.001 | |
| UAV_UAV | 0.46 | 12 | −0.26 | 0.50 | <0.001 | |
| UAV_RTK | 0.81 | 24 | −0.30 | 0.09 | 0.062 | |
| UAV_LiDAR | 0.87 | 25 | −0.33 | 0.11 | 0.053 | |
| UAV_UAV | 1.15 | 33 | −0.66 | −0.15 | 0.002 |
| Statistics | UAV_RTK | UAV_LiDAR | UAV_UAV |
|---|---|---|---|
| RMSE (m) | 0.11 | 0.15 | 0.08 |
| nRMSE (%) | 20 | 25 | 26 |
| Bias (m) | 0.03 | −0.03 | −0.02 |
| Pearson’s r | 0.96 | 0.91 | 0.95 |
| p value 1 | 0.09 | 0.30 | 0.20 |
| Method | Data Purchase | Equipment | Data Collection | Software | Data Processing | Total Cost |
|---|---|---|---|---|---|---|
| Traditional | 0 | 0 | $16,500 | 0 | $400 | $16,900 |
| UAV_LiDAR | $100 | $444 | $12,000 | $1000 | $800 | $14,344 |
| UAV_UAV | 0 | 63 | $9,000 | $1000 | $400 | $10,463 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, S.; McDermid, G.J.; Castilla, G.; Linke, J. Measuring Vegetation Height in Linear Disturbances in the Boreal Forest with UAV Photogrammetry. Remote Sens. 2017, 9, 1257. https://doi.org/10.3390/rs9121257
Chen S, McDermid GJ, Castilla G, Linke J. Measuring Vegetation Height in Linear Disturbances in the Boreal Forest with UAV Photogrammetry. Remote Sensing. 2017; 9(12):1257. https://doi.org/10.3390/rs9121257
Chicago/Turabian StyleChen, Shijuan, Gregory J. McDermid, Guillermo Castilla, and Julia Linke. 2017. "Measuring Vegetation Height in Linear Disturbances in the Boreal Forest with UAV Photogrammetry" Remote Sensing 9, no. 12: 1257. https://doi.org/10.3390/rs9121257
APA StyleChen, S., McDermid, G. J., Castilla, G., & Linke, J. (2017). Measuring Vegetation Height in Linear Disturbances in the Boreal Forest with UAV Photogrammetry. Remote Sensing, 9(12), 1257. https://doi.org/10.3390/rs9121257