
The Highest Gradient Model: A New Method for Analytical Assessment of the Efficiency of LiDAR-Derived Visualization Techniques for Landform Detection and Mapping


Abstract
:
1. Introduction
2. Materials and Methods
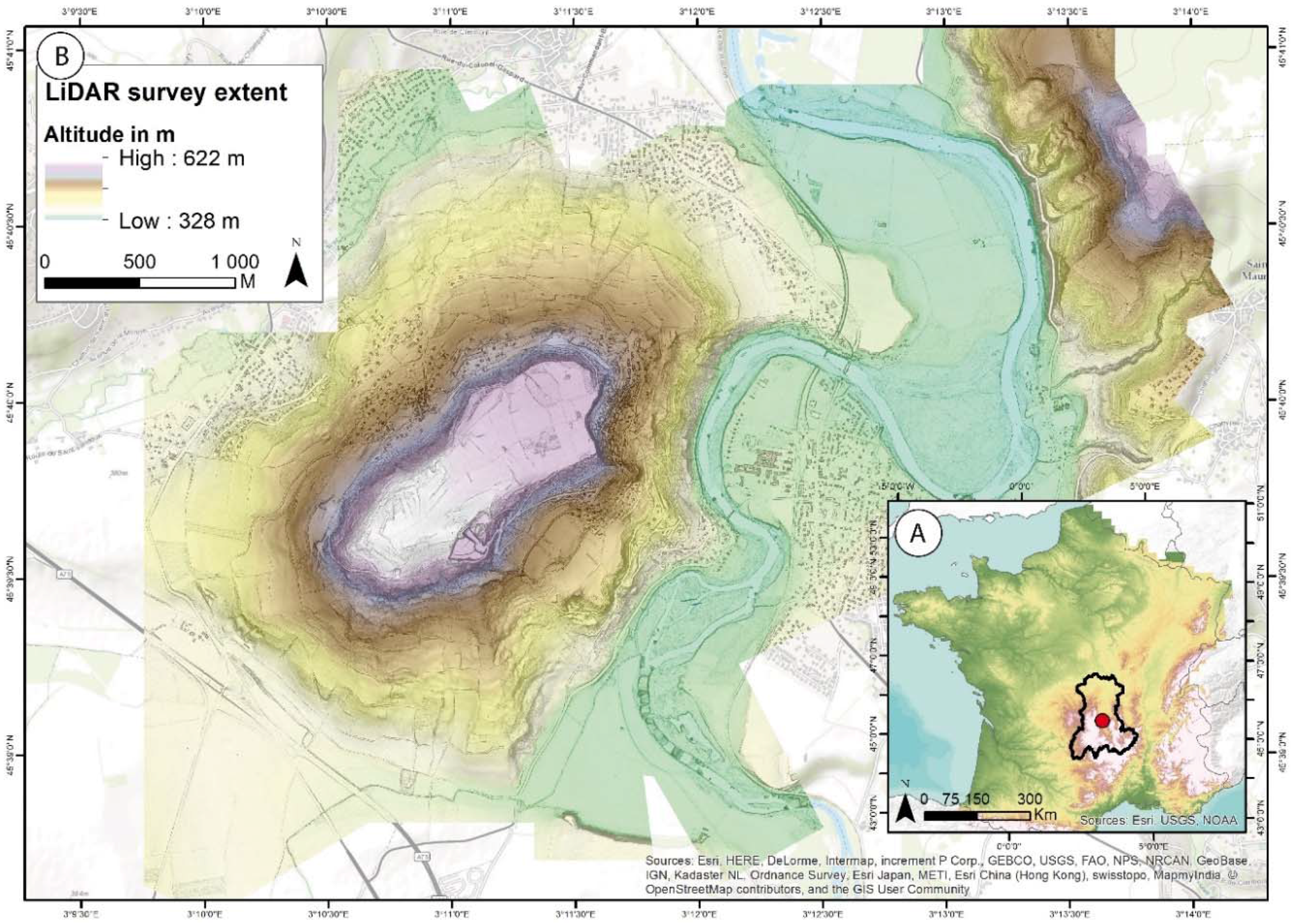
2.1. The LiDAR Survey
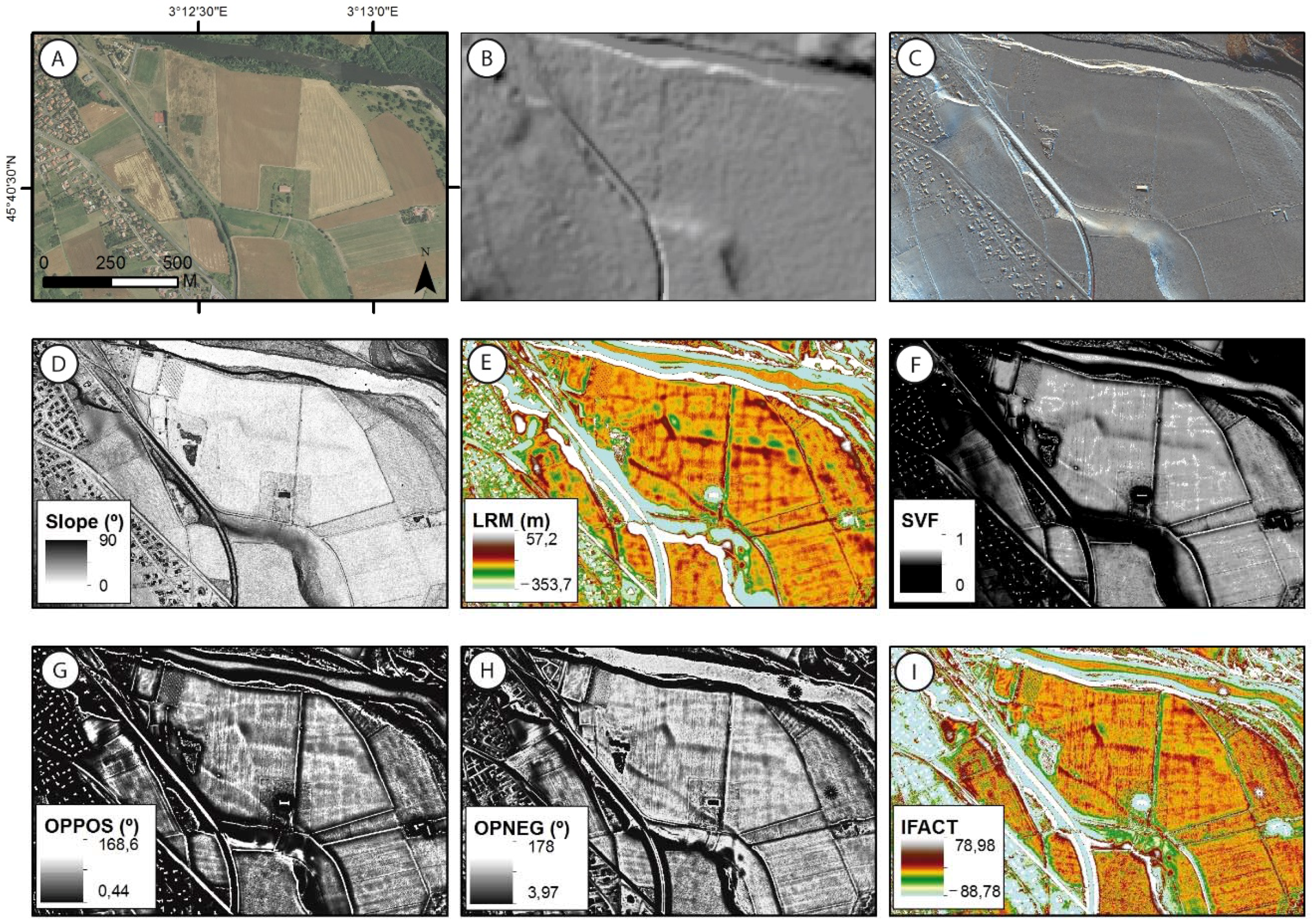
2.2. Processing Derived Models
2.3. Assessing Methods for Derived Models
2.3.1. Non-Analytical Approach
2.3.2. Analytical Approach
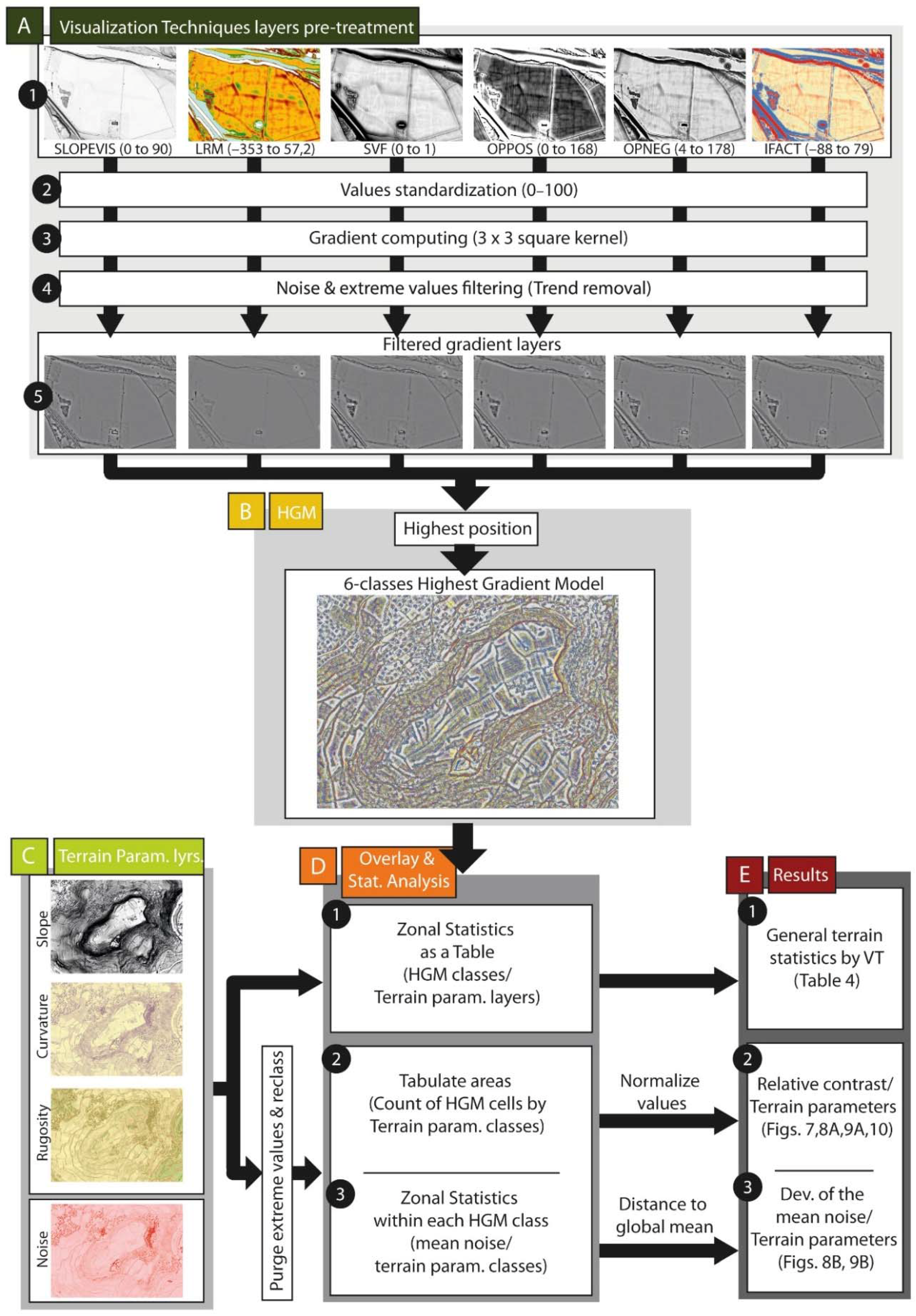
Processing the Highest Gradient Model (HGM) Method
Using the Highest Gradient Model for Spatial Statistics Analysis
3. Results
3.1. Non-Analytical Assessment Methods
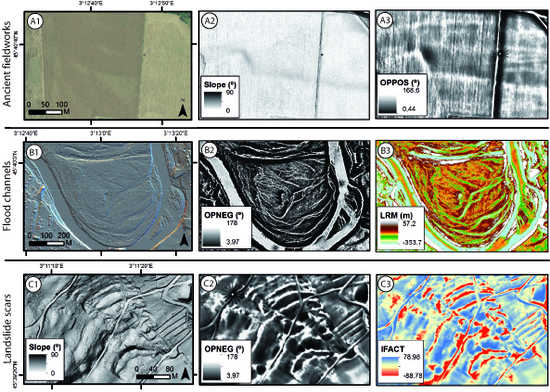
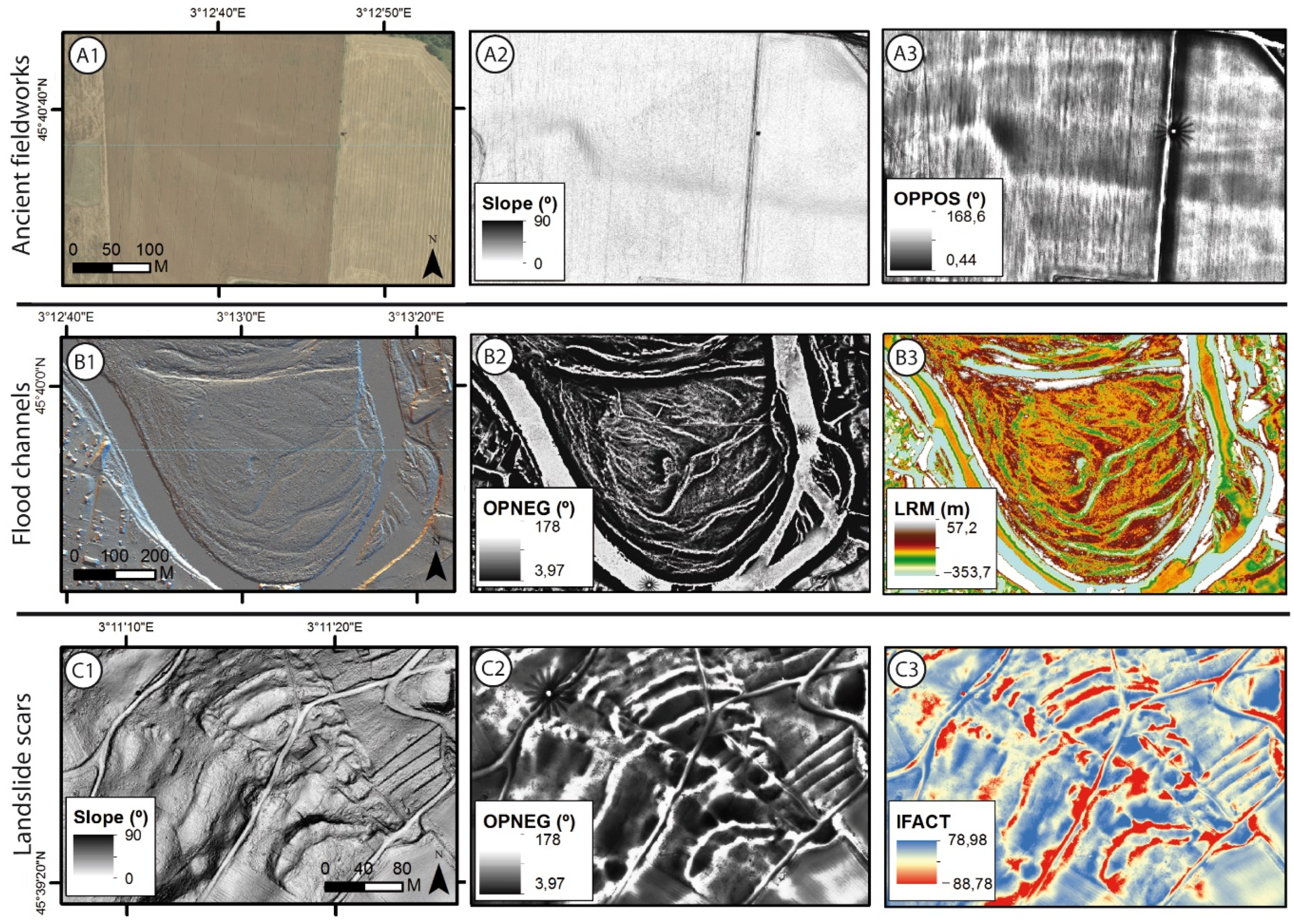
3.1.1. Qualitative Image Analysis: Landform Detection
3.1.2. Counting Total Detected Landforms’ Length
3.2. Analytical Assessing Methods
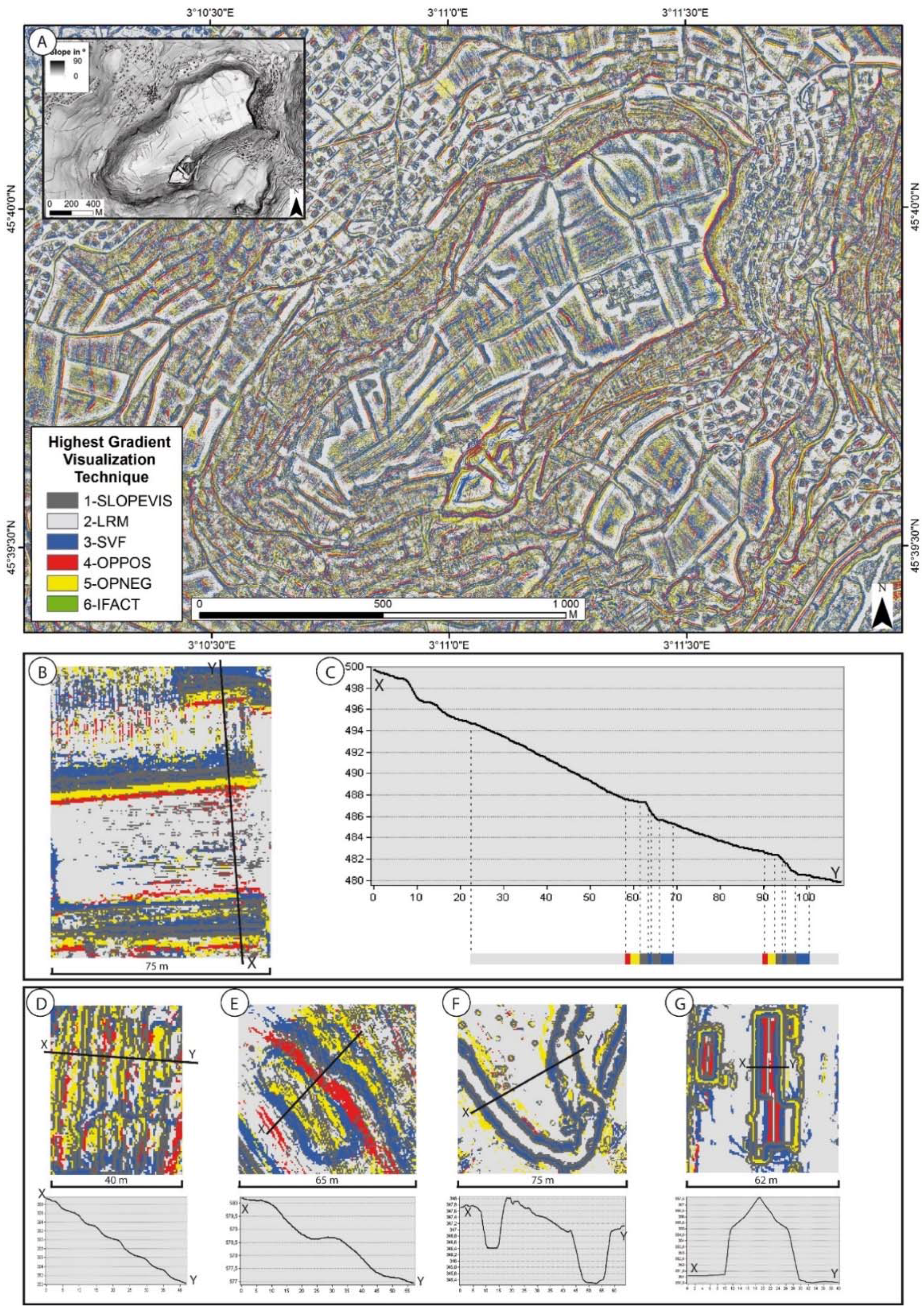
3.2.1. The Highest Gradient Model
3.2.2. Spatial Statistics Analysis
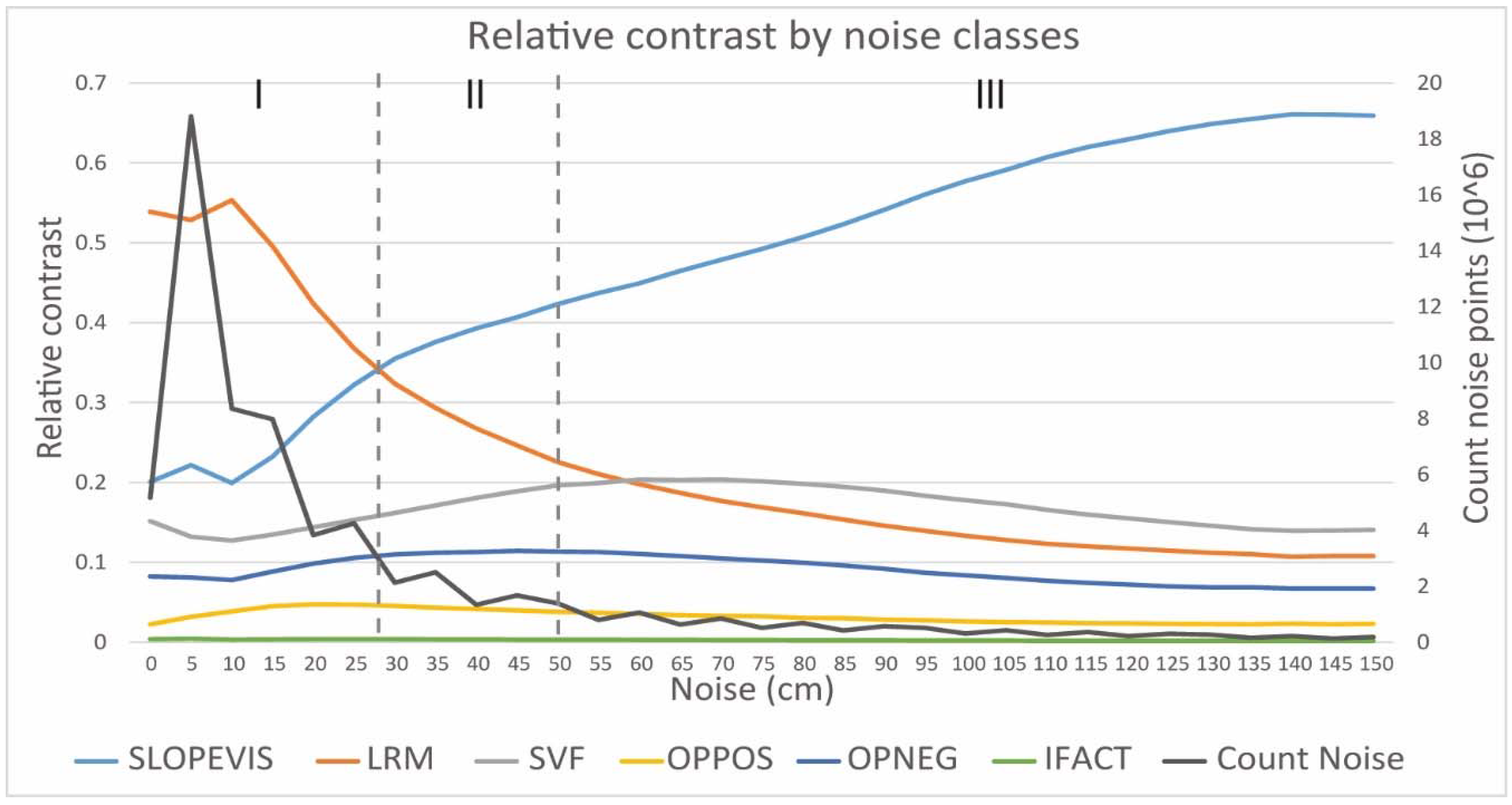
General Noise Analysis
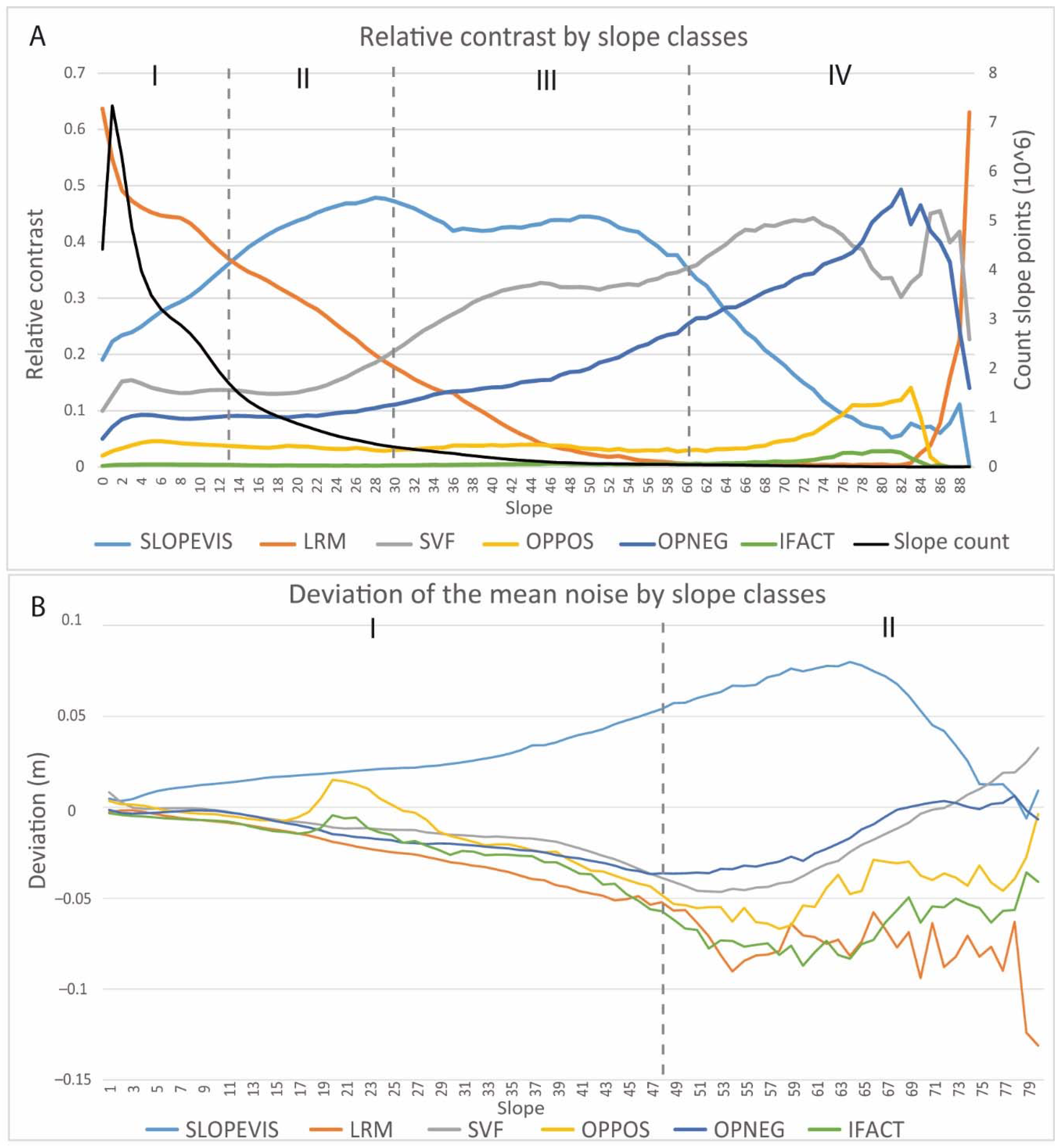
Terrain Parameter: Slope
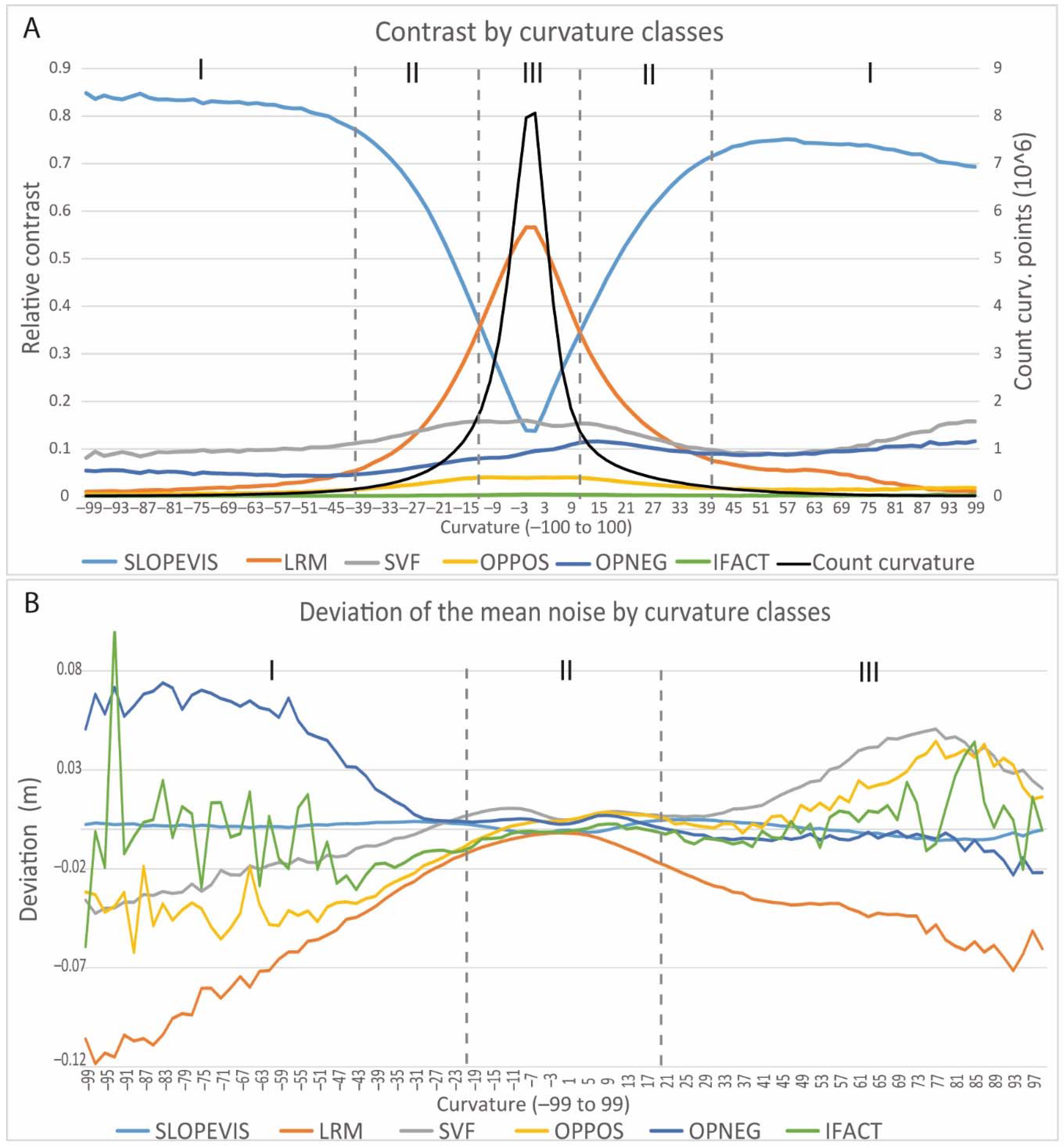
Terrain Parameter: Curvature
4. Discussion
4.1. A Detailed Assessment of ALS-Derived Raster Visualization Techniques
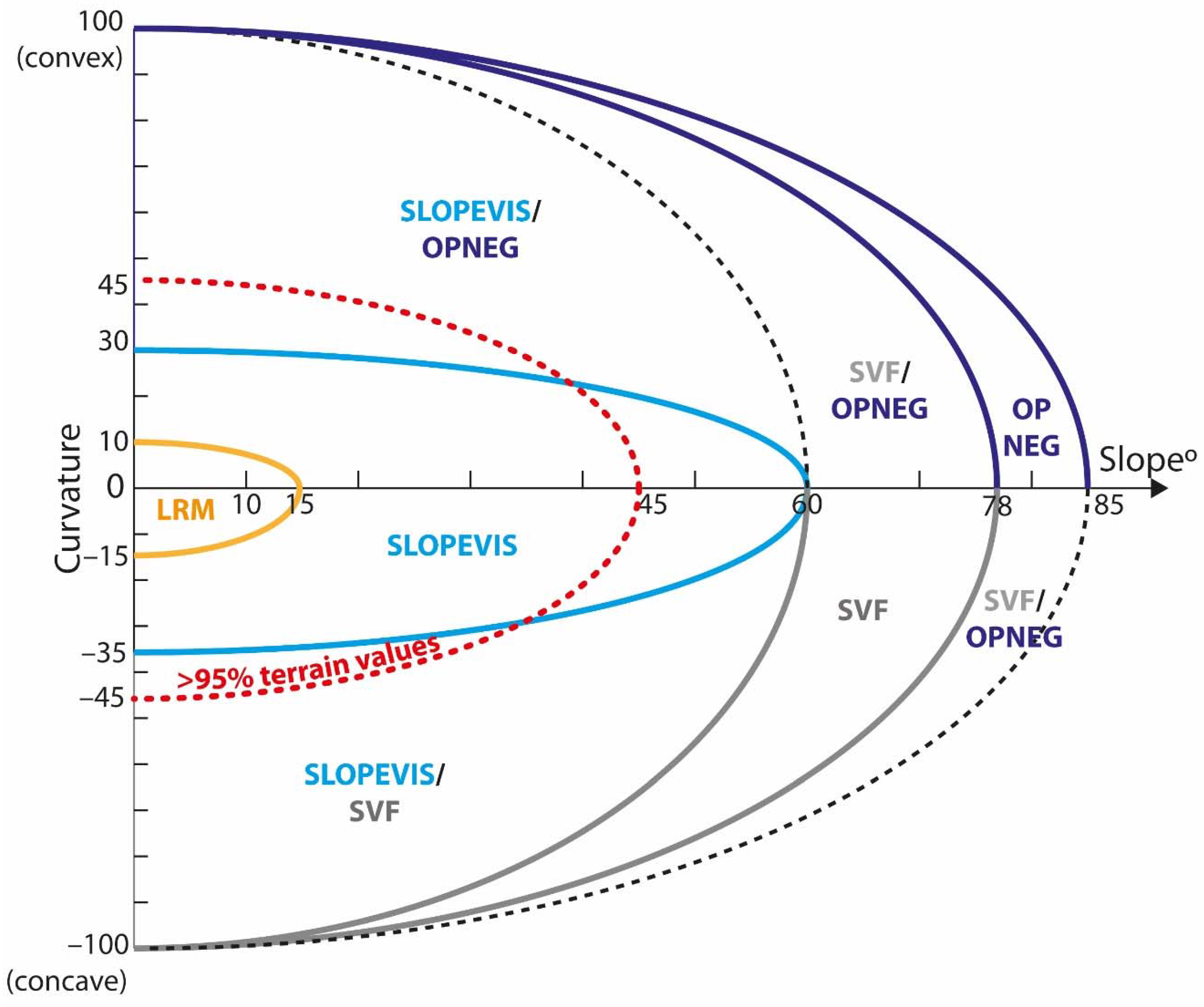
- SLOPEVIS has good results in medium to high slopes of any curvature except straight slopes or flat areas. As a major drawback, it integrates abundant noise independently of slope or curvature, and this noise contributes largely to the contrast in steep slopes. This excess of noise can make the detection of target features difficult or introduce bias.
- LRM shows excellent results in low slopes and flat areas, mainly in straight or low-curvature slopes. LRM integrates small amounts of noise independently of slope or curvature. The fact that the high contrast is not connected to high noise makes it an excellent technique for subtle feature detection. The main inconvenience is that its detection ability is limited to areas with predominantly low slopes or flat relief [31].
- SVF shows good results in steep slopes, in convex and especially in concave areas, where it is one of the better techniques. It also provides a reasonable performance in flat areas (sometimes better than Openness). As a major drawback, it integrates medium noise increasingly with slope and convexity, which contributes to the contrast and can make feature detection difficult.
- OPPOS has, in general, poor results compared to the other VTs, for any slope and curvature. It has only slightly better results in convex areas, where it also integrates more noise. This combination of poor contrast and noise clearly makes this VT less useful than the others.
- OPNEG showed a better than expected performance, working well in steep slopes, in concave and flat areas, but especially in convex areas, systematically outclassing OPPOS. This is consistent with the idea that these two VTs are not exactly complementary [33]. OPNEG contrast results are comparable to SVF in convex areas, but, as an additional advantage, OPNEG integrates medium to low noise in these areas, and only moderate noise in general.
- IFACT shows poor results in any terrain, probably because OPPOS and OPNEG are almost always much better. It seems to work slightly better in convex areas like OPPOS does, and to integrate medium noise. However, the very few IFACT cells in the HGM make it difficult to assess the individual behavior of this VT.
4.2. The HGM as a Robust Method for DM Assessing: Strengths, Limitations, and Further Developments
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
Abbreviations
| ALS | Airborne LiDAR System |
| LiDAR | Light Detection and Ranging |
| DEM | Digital Elevation Model |
| DTM | Digital Terrain Model |
| DM | Derived Model |
| VT | Visualization Technique |
| SLOPEVIS | Slope as a visualization Technique |
| LRM | Local Relief Model |
| SVF | Sky-View Factor |
| OPPOS | Positive Openness |
| OPNEG | Negative Openness |
| IFACT | I-factor |
| HGM | Highest Gradient Model |
| SRR | Surface Relief Ratio |
| StD | Standard Deviation |
Appendix A
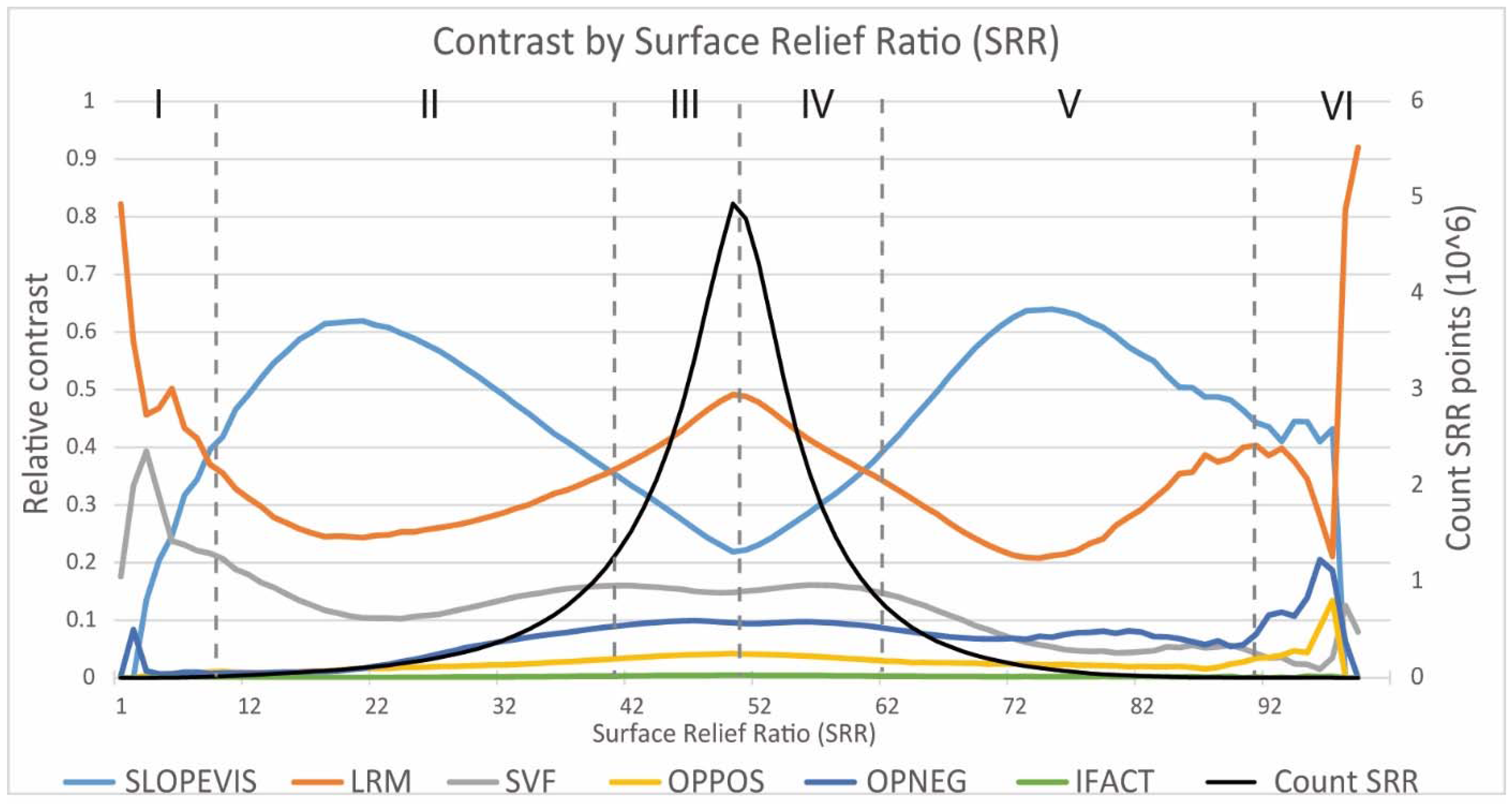
Spatial Statistics Analysis. Terrain Parameter: Surface Relief Ratio (SRR)

References
- Lasaponara, R.; Coluzzi, R.; Gizzi, F.T.; Masini, N. On the LiDAR contribution for the archaeological and geomorphological study of a deserted medieval village in Southern Italy. J. Geophys. Eng. 2010, 7, 155–163. [Google Scholar]
- Lin, Z.; Kaneda, H.; Mukoyama, S.; Asada, N.; Chiba, T. Detection of subtle tectonic-geomorphic features in densely forested mountains by very high-resolution airborne LiDAR survey. Geomorphology 2013, 182, 104–115. [Google Scholar] [CrossRef]
- Carey, C.J.; Brown, T.G.; Challis, K.C.; Howard, A.J.; Cooper, L. Predictive modelling of multiperiod geoarchaeological resources at a river confluence: A case study from the Trent-Soar, UK. Archaeol. Prospect. 2006, 13, 241–250. [Google Scholar] [CrossRef]
- Challis, K. Airborne laser altimetry in alluviated landscapes. Archaeol. Prospect. 2006, 13, 103–127. [Google Scholar] [CrossRef]
- Jones, A.F.; Brewer, P.A.; Johnstone, E.; Macklin, M.G. High-resolution interpretative geomorphological mapping of river valley environments using airborne LiDAR data. Earth Surf. Process. Landf. 2007, 32, 1574–1592. [Google Scholar] [CrossRef]
- Challis, K.; Carey, C.; Kincey, M.; Howard, A.J. Airborne Lidar intensity and geoarchaeological Prospection in River Valley floors. Archaeol. Prospect. 2011, 18, 1–13. [Google Scholar] [CrossRef]
- Hardt, J.; Hebenstreit, R.; Lüthgens, C.; Böse, M. High-resolution mapping of ice-marginal landforms in the Barnim region, Northeast Germany. Geomorphology 2015, 250, 41–52. [Google Scholar] [CrossRef]
- Yu, P.; Eyles, N.; Sookhan, S. Automated drumlin shape and volume estimation using high resolution LiDAR imagery (Curvature Based Relief Separation): A test from the Wadena Drumlin Field, Minnesota. Geomorphology 2015, 246, 589–601. [Google Scholar] [CrossRef]
- Glenn, N.F.; Streutker, D.R.; Chadwick, D.J.; Thackray, G.D.; Dorsch, S.J. Analysis of LiDAR-derived topographic information for characterizing and differentiating landslide morphology and activity. Geomorphology 2006, 73, 131–148. [Google Scholar] [CrossRef]
- Van Den Eckhaut, M.; Poesen, J.; Verstraeten, G.; Vanacker, V.; Nyssen, J.; Moeyersons, J. Use of LIDAR-derived images for mapping old landslides under forest. Earth Surf. Process. Landf. 2007, 32, 754–769. [Google Scholar] [CrossRef]
- Sutinen, R.; Hyvönen, E.; Kukkonen, I. LiDAR detection of paleolandslides in the vicinity of the Suasselkä postglacial fault, Finnish Lapland. Int. J. Appl. Earth Obs. Geoinf. 2014, 27, 91–99. [Google Scholar] [CrossRef]
- Chen, R.F.; Lin, C.W.; Chen, Y.H.; He, T.C.; Fei, L.Y.; Jin, J. ; Detecting and characterizing active thrust fault and deep-seated landslides in dense forest areas of Southern Taiwan: Using airborne LiDAR DEM. Remote Sens. 2015, 7, 15443–15466. [Google Scholar] [CrossRef]
- Devereux, B.J.; Amable, G.S.; Crow, P.; Cliff, A.D. The potential of airborne LiDAR for detection of archaeological features under woodland canopies. Antiquity 2005, 79, 648–660. [Google Scholar] [CrossRef]
- Crutchley, S. Light detection and ranging (LiDAR) in the Witham Valley, Lincolnshire: An assessment of new remote sensing techniques. Archaeol. Prospect. 2006, 13, 251–257. [Google Scholar] [CrossRef]
- Humme, A.; Lindenbergh, R.; Sueur, C. Revealing Celtic fields from LiDAR data using Kriging based filtering. In Proceedings of the ISPRS Commission V Symposium “Image Engineering and Vision Metrology”, Dresden, Germany, 25–27 September 2006.
- Challis, K.; Kokalj, Z.; Kincey, M.; Moscrop, D.; Howard, A.J. Airborne LiDAR and historic environment records. Antiquity 2008, 82, 1055–1064. [Google Scholar] [CrossRef]
- Doneus, M.; Briese, C.; Fera, M.; Janner, M. Archaeological prospection of forested areas using full-waveform airborne laser scanning. J. Archaeol. Sci. 2008, 35, 882–893. [Google Scholar] [CrossRef]
- Kokalj, Z.; Zaksek, K.; Ostir, K. Application of sky-view factor for the visualisation of historic landscape features in lidar-derived relief models. Antiquity 2011, 85, 263–273. [Google Scholar] [CrossRef]
- Zakšek, K.; Oštir, K.; Kokalj, Ž. Sky-view factor as a relief visualization technique. Remote Sens. 2011, 3, 398–415. [Google Scholar] [CrossRef]
- Ludemann, T. Airborne laser scanning of historical wood charcoal production sites—A new tool of kiln site anthropology at the landscape level. In Wood and Charcoal. Evidence for Human and Natural History; Universitat de València: Valencia, Spain, 2012; pp. 247–252. [Google Scholar]
- Evans, D.H.; Fletcher, R.J.; Pottier, C.; Chevance, J.B.; Soutif, D.; Tan, B.S.; Im, S.; Ea, D.; Tin, T.; Kim, S.; et al. Uncovering archaeological landscapes at angkor using LiDAR. Proc. Natl. Acad. Sci. USA 2013, 110, 12595–12600. [Google Scholar] [CrossRef] [PubMed]
- Chase, A.F.; Chase, D.Z.; Awe, J.J.; Weishampel, J.F.; Iannone, G.; Moyes, H.; Yaeger, J.; Brown, M.K. The use of LiDAR in understanding the ancient Maya landscape: Caracol and Western Belize. Adv. Archaeol. Pract. 2014, 2, 147–160. [Google Scholar] [CrossRef]
- Johnson, K.M.; Ouimet, W.B. Rediscovering the lost archaeological landscape of southern New England using airborne light detection and ranging (LiDAR). J. Archaeol. Sci. 2014, 43, 9–20. [Google Scholar] [CrossRef]
- Hesse, R. Geomorphological traces of conflict in high-resolution elevation models. Appl. Geogr. 2014, 46, 11–20. [Google Scholar] [CrossRef]
- Stark, M.T.; Evans, D.; Rachna, C.; Piphal, H.; Carter, A. Residential patterning at Angkor Wat. Antiquity 2015, 89, 1439–1455. [Google Scholar] [CrossRef]
- Lozano, J.F.; Alonso, G.G.; Morán, M.Á.F. Using airborne LiDAR sensing technology and aerial orthoimages to unravel roman water supply systems and gold works in NW Spain (Eria valley, León). J. Archaeol. Sci. 2015, 53, 356–373. [Google Scholar] [CrossRef]
- Diaz, J.F.; Carter, W.; Shrestha, R.; Glennie, C. Now you see it, now you don’t: Understanding airborne mapping LiDAR collection and data product generation for archaeological research in Mesoamerica. Remote Sens. 2014, 6, 9951–10001. [Google Scholar] [CrossRef]
- Prufer, K.M.; Thompson, A.E.; Kennett, D.J. Evaluating airborne LiDAR for detecting settlements and modified landscapes in disturbed tropical environments at Uxbenká, Belize. J. Archaeol. Sci. 2015, 57, 1–13. [Google Scholar] [CrossRef]
- O’Neal, M.A. An objective approach to defining earthwork geometries using subdecimeter digital elevation models. Geoarchaeology 2012, 27, 157–165. [Google Scholar] [CrossRef]
- Mcneary, R.W.A. LiDAR investigation of Knockdhu promontory and its environs, County Antrim, Northern Ireland. Archaeol. Prospect. 2014, 21, 263–276. [Google Scholar] [CrossRef]
- Hesse, R. LiDAR-derived Local Relief Models a new tool for archaeological prospection. Archaeol. Prospect. 2010, 17, 67–72. [Google Scholar] [CrossRef]
- Yokoyama, R.; Shlrasawa, M.; Pike, R.J. Visualizing topography by openness: A new application of image processing to digital elevation models. Photogramm. Eng. Remote Sens. 2002, 68, 257–265. [Google Scholar]
- Doneus, M. Openness as visualization technique for interpretative mapping of airborne LiDAR derived digital terrain models. Remote Sens. 2013, 5, 6427–6442. [Google Scholar] [CrossRef]
- Bennett, R.; Welham, K.; Hill, R.A.; Ford, A. A Comparison of Visualization Techniques for Models Created from Airborne Laser Scanned Data. Archaeol. Prospect. 2012, 19, 41–48. [Google Scholar] [CrossRef]
- Stular, B.; Kokalj, Z.; Ostir, K.; Nuninger, L. Visualization of lidar-derived relief models for detection of archaeological features. J. Archaeol. Sci. 2012, 39, 3354–3360. [Google Scholar] [CrossRef]
- Smith, M.J.; Clark, C.D. Methods for the visualization of digital elevation models for landform mapping. Earth Surf. Process. Landf. 2005, 30, 885–900. [Google Scholar] [CrossRef]
- Lozano, J.F.; Alonso, G.G. Improving archaeological prospection using localized UAVs assisted photogrammetry: An example from the Roman Gold District of the Eria River Valley (NW Spain). J. Archaeol. Sci. Rep. 2016, 5, 509–520. [Google Scholar] [CrossRef]
- Simon, F.X.; Pascual, A.M.; Vautier, F.; Miras, Y. Premiers résultats des volets géoarchéologie et géomatique du programme interdisciplinaire AYPONA (Paysages et visages d’une agglomération clermontoise: Approche intégrée et diachronique de l’occupation de l’oppidum de Corent, Auvergne, France). In Proceedings of the Journée régionale de l’archéologie Auvergne, Clermont-Ferrand, France, 17 May 2015.
- Poux, M. Corent, Voyage au Coeur d’une Ville Gauloise; Editions Errance: Paris, France, 2012. [Google Scholar]
- Evans, J.S.; Hudak, A.T. A multiscale curvature algorithm for classifying discrete return LiDAR in forested environments. IEEE Trans. Geosci. Remote Sens. 2007, 45, 1029–1038. [Google Scholar] [CrossRef]
- Tarolli, P. High-resolution topography for understanding Earth surface processes: Opportunities and challenges. Geomorphology 2014, 216, 295–312. [Google Scholar] [CrossRef]
- Novák, D. Local Relief Model (LRM) Toolbox for ArcGis. Available online: https://www.scribd.com/document/266878869/LRM-Toolbox-for-ArcGIS-Manual (accessed on 1 February 2017).
- Kokalj, Ž.; Zakšek, K.; Oštir, K.; Pehani, P.; Čotar, K. Relief Visualization Toolbox. Available online: http://iaps.zrc-sazu.si/sites/default/files/rvt_1.3.pdf (accessed on 1 February 2017).
- Evans, J.; Oakleaf, J.; Cushman, S.; Theobald, D. An ArcGis Toolbox for Surface Gradient and Geomorphometric Modeling, Version 2.0-0. Available online: http://evansmurphy.wix.com/evansspatial (accessed on 1 February 2017).
- Pike, R.J.; Wilson, S.E. Elevation-relief ratio, hypsometric integral, and geomorphic area-altitude analysis. Bull. Geol. Soc. Am. 1971, 82, 1079–1084. [Google Scholar] [CrossRef]
- Challis, K.; Forlin, P.; Kincey, M. A Generic Toolkit for the Visualization of Archaeological Features on Airborne LiDAR Elevation Data. Archaeol. Prospect. 2011, 18, 279–289. [Google Scholar] [CrossRef]
- Sevara, C.; Pregesbauer, M.; Doneus, M.; Verhoeven, G.; Trinks, I. Pixel versus object—A comparison of strategies for the semi-automated mapping of archaeological features using airborne laser scanning data. J. Archaeol. Sci. Rep. 2016, 5, 485–498. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Software | Settings | Reference | |
|---|---|---|---|
| Slope (SLOPEVIS) | ArcGIS Spatial Analyst | Standard (3 × 3 sq. kernel, degrees) | - |
| Local Relief Model (LRM) | Open source toolbox for ArcGIS | Circular kernel (25 m) | [42] |
| Sky-view Factor (SVF) | Relief Visualization Toolbox 1.1 | 16 search directions, Circular kernel (25m), Noise removal: medium, Vertical exaggeration: 2 | [18,19,43] |
| Positive Openness (OPPOS) | Relief Visualization Toolbox 1.1 | ||
| Negative Openness (OPNEG) | Relief Visualization Toolbox 1.1 | ||
| I-Factor (IFACT) | ArcGIS Raster Calculator | I = (OPPOS-OPNEG)/2 | [2] |
| Rock Slumps Scars | Flood Channels | Ancient Field Patterns | |
|---|---|---|---|
| SLOPEVIS | +++ | − | − |
| LRM | + | ++ | +++ |
| SVF | + | + | + |
| OPPOS | ++ | ++ | +++ |
| OPNEG | +++ | +++ | ++ |
| IFACT | ++ | +++ | ++ |
| Rock Slumps Scars | Flood Channels | Field Patterns | |
|---|---|---|---|
| SLOPEVIS | 2423 | 668 | 447 |
| LRM | 1931 | 2953 | 2700 |
| SVF | 1393 | 1276 | 2642 |
| OPPOS | 1834 | 1639 | 2770 |
| OPNEG | 1957 | 3261 | 2044 |
| IFACT | 1886 | 3928 | 2706 |
| Noise (cm) | Slope (°) | Curvature (Bolstad) × 103 | Surface Relief Ratio (SRR) | |||||
|---|---|---|---|---|---|---|---|---|
| Mean | StD | Mean | StD | Mean | StD | Mean | StD | |
| 1-SLOPEVIS | 5.97 | 21.55 | 13.69 | 12.26 | −0.27 | 48.39 | 0.484 | 0.12 |
| 2-LRM | 1.73 | 12.38 | 7.58 | 7.43 | −0.62 | 71.73 | 0.490 | 0.08 |
| 3-SVF | 4.07 | 26.03 | 14.18 | 15.14 | 0.97 | 77.52 | 0.486 | 0.08 |
| 4-OPPOS | 3.41 | 22.77 | 11.39 | 11.71 | 0.64 | 19.64 | 0.492 | 0.07 |
| 5-OPNEG | 3.95 | 20.80 | 14.19 | 15.21 | 1.81 | 56.93 | 0.495 | 0.07 |
| 6-IFACT | 2.65 | 9.52 | 11.69 | 13.58 | 1.58 | 21.05 | 0.497 | 0.07 |
| Overall Mean | 3.65 | 18.36 | 11.19 | 10.94 | 0.00 | 40.50 | 0.488 | 0.09 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license ( http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mayoral, A.; Toumazet, J.-P.; Simon, F.-X.; Vautier, F.; Peiry, J.-L. The Highest Gradient Model: A New Method for Analytical Assessment of the Efficiency of LiDAR-Derived Visualization Techniques for Landform Detection and Mapping. Remote Sens. 2017, 9, 120. https://doi.org/10.3390/rs9020120
Mayoral A, Toumazet J-P, Simon F-X, Vautier F, Peiry J-L. The Highest Gradient Model: A New Method for Analytical Assessment of the Efficiency of LiDAR-Derived Visualization Techniques for Landform Detection and Mapping. Remote Sensing. 2017; 9(2):120. https://doi.org/10.3390/rs9020120
Chicago/Turabian StyleMayoral, Alfredo, Jean-Pierre Toumazet, François-Xavier Simon, Franck Vautier, and Jean-Luc Peiry. 2017. "The Highest Gradient Model: A New Method for Analytical Assessment of the Efficiency of LiDAR-Derived Visualization Techniques for Landform Detection and Mapping" Remote Sensing 9, no. 2: 120. https://doi.org/10.3390/rs9020120
APA StyleMayoral, A., Toumazet, J.-P., Simon, F.-X., Vautier, F., & Peiry, J.-L. (2017). The Highest Gradient Model: A New Method for Analytical Assessment of the Efficiency of LiDAR-Derived Visualization Techniques for Landform Detection and Mapping. Remote Sensing, 9(2), 120. https://doi.org/10.3390/rs9020120