
Mobile LiDAR System: New Possibilities for the Documentation and Dissemination of Large Cultural Heritage Sites

 ,
,  ,
, 

Abstract
:
1. Introduction
2. Materials
3. Methods
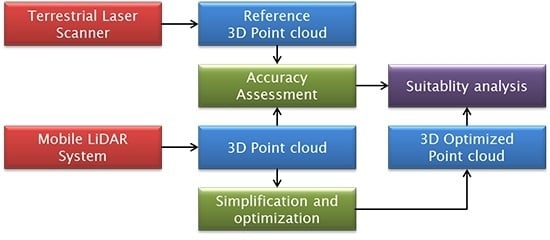
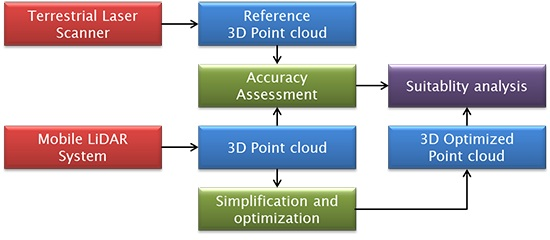
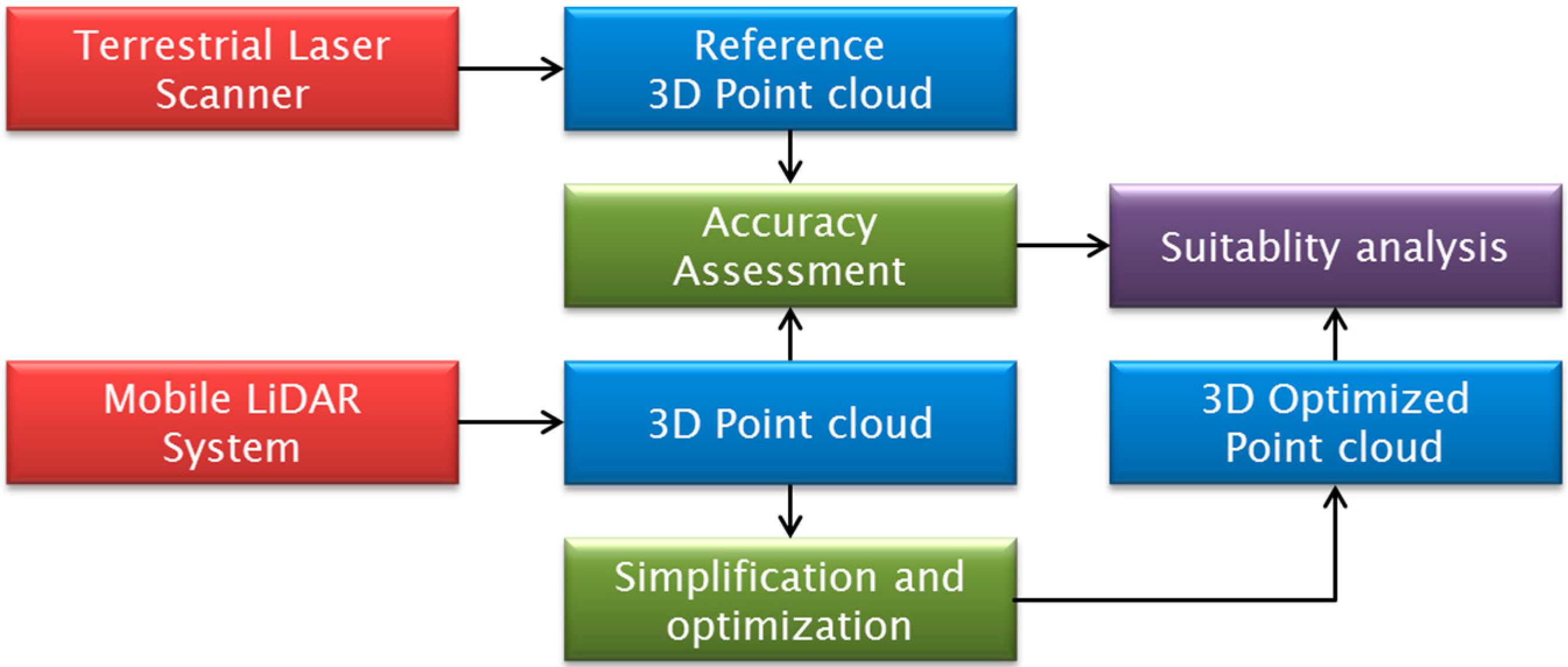
3.1. Accuracy Assessment Protocol
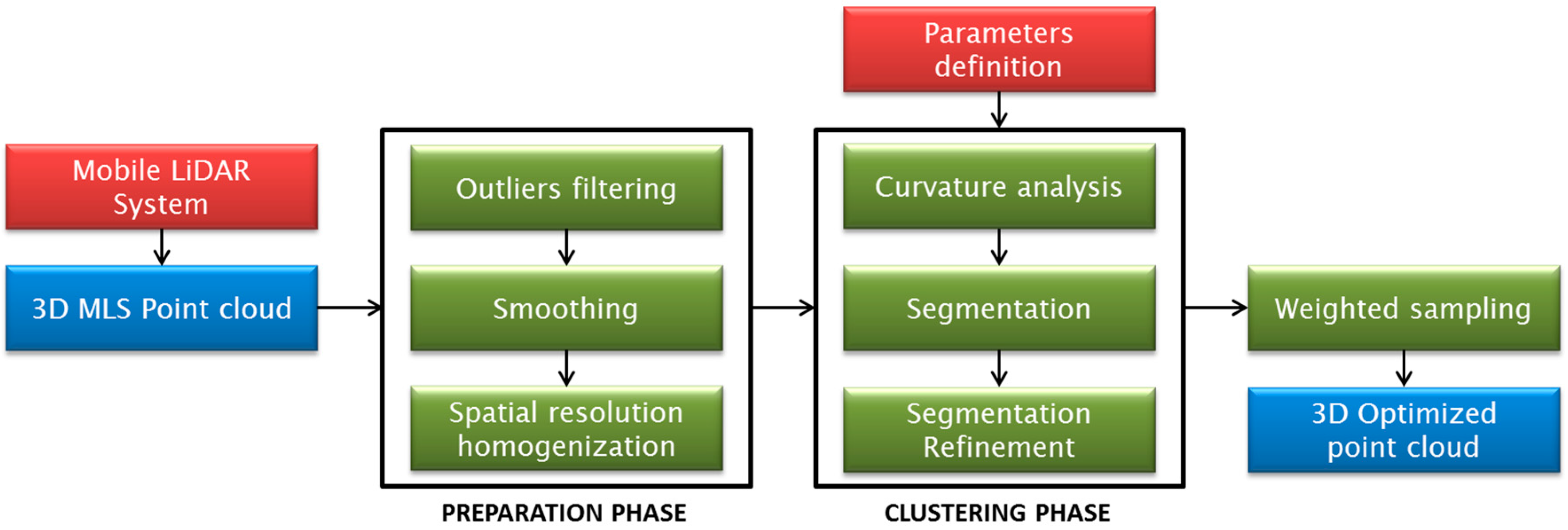
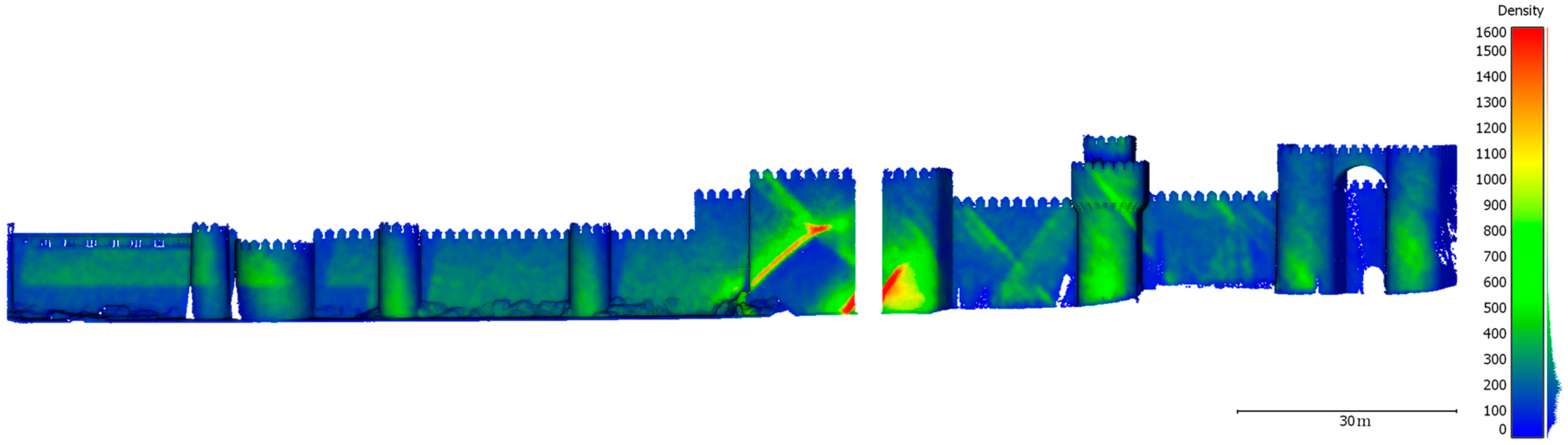
3.2. Point Cloud Optimization
- An initial outliers filtering of the MLS point cloud based on the absolute deviation (Euclidean distance) of the points from a fitted local plane in a spherical vicinity. The absolute threshold is not set very strictly to avoid false positives. In the case a plane cannot be fitted in the neighborhood, the point is also excluded.
- Next, in order to ease the simplification, a local smoothing process by means of a moving least squares [57] is applied. This operation involves a point displacement regarding the original positions; however, the spherical search volume is chosen in relation to the precision obtained from the accuracy assessment studies (see Section 3.1) to avoid a precision deterioration of the final optimized point cloud.
- Finally, a reduction of high point density areas, due to the MLS acquisition methodology, is applied. For this task, a spatial sampling is carried out. The sampling value determines the final results. Since there are several options for this sampling value, all of them being related to the input point cloud precision, the proposed one is to setup the 95% confidence interval of the error dispersion from the accuracy assessment studies. By this procedure, it is possible to guarantee the optimized final results.
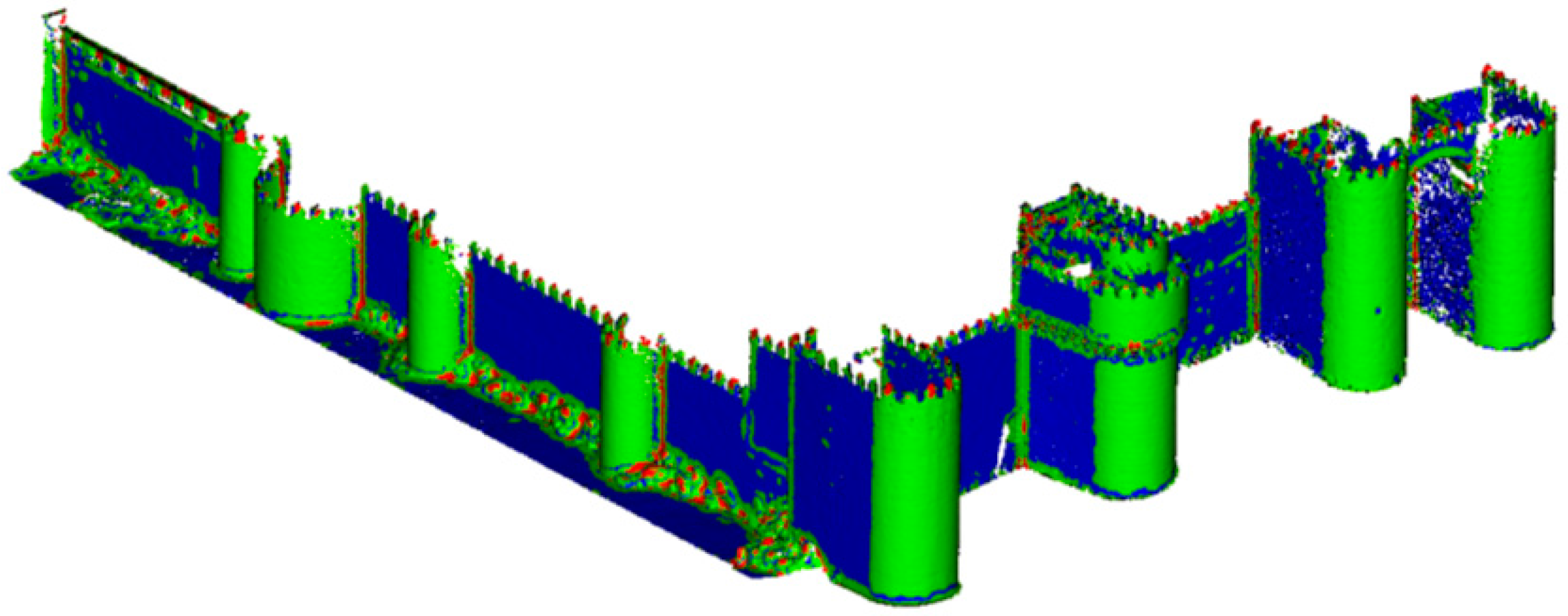
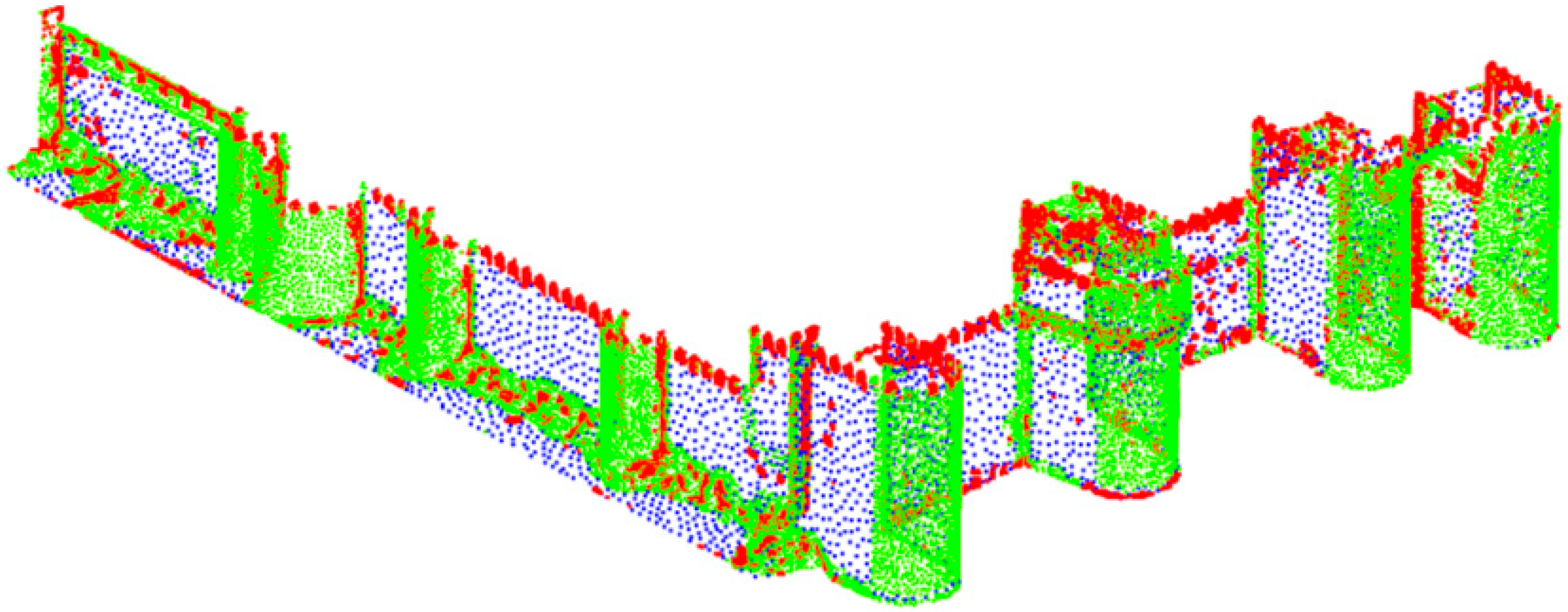
- Initially, the local curvature is computed in a wide spherical neighborhood to reduce noise effects. The spherical radius for the curvature calculation is defined in relation to the main geometrical elements of the CH site (i.e., a-priori length and height).
- Next, the 3D point cloud is segmented according to the computed local curvature and the a-priori approximate knowledge of the main geometrical primitives presented (e.g., planes and radius of cylinders). These coarse values allow defining a discrete number of clusters according to a similar curvature values. The final number of clusters is increased in one, since the highest curvature values are related to non-parametric areas, as the break-lines, borders, corners, abrupt areas, surface discontinuities or geometric and topological errors.
- Finally, since the curvature computation and clustering could be affected by local errors, especially in transition areas, a refinement based on connected component analysis is carried out to reclassify them in the more suitable cluster. This analysis is based on an octree representation of the point cloud, so a reference subdivision level has to be set. In order to find connected components, the octree level has to be set slightly higher than the homogenized spatial resolution. Since the spatial resolution was homogenized in the preparation phase, and an octree level has to be fixed, it is possible to relate easily the component’s area by the number of points. For the main features of the CH site, it is possible to define their minimum area. As result, the components inside a cluster that do not verify this minimum area are reallocated to the neighbor cluster in crescent curvature. No points are removed.
4. Experimental Results
4.1. Point Cloud Accuracy Assessment
4.2. Optimization Analysis
5. Discussion
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Guidi, G.; Micoli, L.L.; Gonizzi, S.; Brennan, M.; Frischer, B. Image-based 3D capture of cultural heritage artifacts an experimental study about 3D data quality. In Proceedings of the 2015 Digital Heritage, Granada, Spain, 28 September–2 October 2015; pp. 321–324.
- Del Pozo, S.; Herrero-Pascual, J.; Felipe-García, B.; Hernández-López, D.; Rodríguez-Gonzálvez, P.; González-Aguilera, D. Multispectral radiometric analysis of façades to detect pathologies from active and passive remote sensing. Remote Sens. 2016, 8, 80. [Google Scholar] [CrossRef]
- Borrmann, D.; Heß, R.; Houshiar, H.; Eck, D.; Schilling, K.; Nüchter, A. Robotic mapping of cultural heritage sites. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2015, XL-5/W4, 9–16. [Google Scholar] [CrossRef]
- Puente, I.; Solla, M.; González-Jorge, H.; Arias, P. NDT documentation and evaluation of the Roman Bridge of Lugo using GPR and mobile and static LiDAR. J. Perform. Constr. Facil. 2013, 29, 06014004. [Google Scholar] [CrossRef]
- Casadio, F.; Daher, C.; Bellot-Gurlet, L. Raman spectroscopy of cultural heritage materials: Overview of applications and new frontiers in instrumentation, sampling modalities, and data processing. Top. Curr. Chem. 2016, 374, 62. [Google Scholar] [CrossRef] [PubMed]
- Johnson, K.M.; Ouimet, W.B. Rediscovering the lost archaeological landscape of southern New England using airborne light detection and ranging (LiDAR). J. Archaeol. Sci. 2014, 43, 9–20. [Google Scholar] [CrossRef]
- Von Schwerin, J.; Richards-Rissetto, H.; Remondino, F.; Spera, M.G.; Auer, M.; Billen, N.; Loos, L.; Stelson, L.; Reindel, M. Airborne LiDAR acquisition, post-processing and accuracy-checking for a 3D WebGIS of Copan, Honduras. J. Archaeol. Sci. Rep. 2016, 5, 85–104. [Google Scholar] [CrossRef]
- Hyyppä, J.; Jaakkola, A.; Chen, Y.; Kukko, A. Unconventional LIDAR mapping from air, terrestrial and mobile. In Photogrammetric Week, 2013; Wichmann/VDE: Belin/Offenbach, Germany, 2013; pp. 205–214. [Google Scholar]
- Puente, I.; González-Jorge, H.; Martínez-Sáchez, J.; Arias, P. Review of mobile mapping and surveying systems. Measurement 2013, 46, 2127–2145. [Google Scholar] [CrossRef]
- Williams, K.; Olsen, M.; Roe, G.; Glennie, C. Synthesis of transportation applications of mobile LIDAR. Remote Sens. 2013, 5, 4652. [Google Scholar] [CrossRef]
- Lim, S.; Thatcher, C.A.; Brock, J.C.; Kimbrow, D.R.; Danielson, J.J.; Reynolds, B.J. Accuracy assessment of a mobile terrestrial lidar survey at Padre Island National Seashore. Int. J. Remote Sens. 2013, 34, 6355–6366. [Google Scholar] [CrossRef]
- Moskal, L.M.; Zheng, G. Retrieving forest inventory variables with terrestrial laser scanning (TLS) in urban heterogeneous forest. Remote Sens. 2012, 4, 1. [Google Scholar] [CrossRef]
- González-Ferreiro, E.; Miranda, D.; Barreiro-Fernandez, L.; Bujan, S.; Garcia-Gutierrez, J.; Dieguez-Aranda, U. Modelling stand biomass fractions in Galician Eucalyptus globulus plantations by use of different LiDAR pulse densities. For. Syst. 2013, 22, 510–525. [Google Scholar] [CrossRef]
- Bauwens, S.; Bartholomeus, H.; Calders, K.; Lejeune, P. Forest inventory with terrestrial LiDAR: A comparison of static and hand-held mobile laser scanning. Forests 2016, 7, 127. [Google Scholar] [CrossRef]
- Zhang, S.; Wang, C.; Yang, Z.; Chen, Y.; Li, J. Automatic railway power line extraction using mobile laser scanning data. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2016, XLI-B5, 615–619. [Google Scholar] [CrossRef]
- Lauterbach, H.; Borrmann, D.; Heß, R.; Eck, D.; Schilling, K.; Nüchter, A. Evaluation of a backpack-mounted 3D mobile scanning system. Remote Sens. 2015, 7, 13753–13781. [Google Scholar] [CrossRef]
- Ziparo, V.A.; Zaratti, M.; Grisetti, G.; Bonanni, T.M.; Serafin, J.; Cicco, M.D.; Proesmans, M.; Gool, L.V.; Vysotska, O.; Bogoslavskyi, I.; et al. Exploration and mapping of catacombs with mobile robots. In Proceedings of the 2013 IEEE International Symposium on Safety, Security, and Rescue Robotics, Linköping, Sweden, 21–26 October 2013; pp. 1–2.
- Bosse, M.; Zlot, R.; Flick, P. Zebedee: Design of a spring-mounted 3-D range sensor with application to mobile mapping. IEEE Trans. Robot. 2012, 28, 1104–1119. [Google Scholar] [CrossRef]
- Zlot, R.; Bosse, M.; Greenop, K.; Jarzab, Z.; Juckes, E.; Roberts, J. Efficiently capturing large, complex cultural heritage sites with a handheld mobile 3D laser mapping system. J. Cult. Herit. 2014, 15, 670–678. [Google Scholar] [CrossRef]
- Sirmacek, B.; Shen, Y.; Lindenbergh, R.; Zlatanova, S.; Diakite, A. Comparison of Zeb1 and Leica C10 indoor laser scanning point clouds. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2016, III-1, 143–149. [Google Scholar] [CrossRef]
- Calisi, D.; Giannone, F.; Ventura, C.; Salonia, P.; Cottefoglie, F.; Ziparo, V.A. ARIS—A Robotic Approach to Digitization of Indoor and Underground Cultural Heritage Sites. In Proceedings of the International Congress on Digital Heritage, Granada, Spain, 28 September–2 October 2015.
- Calisi, D.; Giannone, F.; Ventura, C.; Salonia, P.; Cottefoglie, F.; Ziparo, V.A. Digitizing Indoor and Underground Cultural Heritage Sites with Robots. Sci. Res. Inf. Technol. 2016, 6, 23–30. [Google Scholar]
- Rondeau, M.-C. New Technologies for city asset mapping: Setting the standard in city digitalisation. GeoInformatics 2015, 18, 20–21. [Google Scholar]
- Rönnholm, P.; Liang, X.; Kukko, A.; Jaakkola, A.; Hyyppä, J. Quality analysis and correction of mobile backpack laser scanning data. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2016, III-1, 41–47. [Google Scholar] [CrossRef]
- Sairam, N.; Nagarajan, S.; Ornitz, S. Development of mobile mapping system for 3D road asset inventory. Sensors 2016, 16, 367. [Google Scholar] [CrossRef] [PubMed]
- Pauly, M.; Gross, M.; Kobbelt, L.P. Efficient simplification of point-sampled surfaces. In Proceedings of the Conference on Visualization, Boston, MA, USA, 27 October–1 November 2002; IEEE Computer Society: Boston, MA, USA, 2002; pp. 163–170. [Google Scholar]
- Song, H.; Feng, H.-Y. A point cloud simplification algorithm for mechanical part inspection. In Proceedings of the Seventh International Conference on Information Technology for Balanced Automation Systems in Manufacturing and Services, Niagara Falls, ON, Canada, 4–6 September 2006; Shen, W., Ed.; Springer: Boston, MA, USA, 2006; pp. 461–468. [Google Scholar]
- Charbonnier, P.; Tarel, J.-P.; Goulette, F. On the Diagnostic of Road Pathway Visibility; Transport Research Arena Europe: Bruxelles, France, 2010. [Google Scholar]
- Yang, B.; Dong, Z. A shape-based segmentation method for mobile laser scanning point clouds. ISPRS J. Photogramm. Remote Sens. 2013, 81, 19–30. [Google Scholar] [CrossRef]
- Sun, H.; Wang, C.; El-Sheimyb, N.; traffics Wang, P. Surrounding detection for terrestrial mobile mapping data quality evaluation. In Proceedings of the 6th International Symposium on Mobile Mapping Technology, São Paulo, Brazil, 21–24 July 2009.
- Oude Elberink, S.; Khoshelham, K.; Arastounia, M.; Diaz Benito, D. Rail track detection and modelling in mobile laser scanner data. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2013, II-5/W2, 223–228. [Google Scholar] [CrossRef]
- Torres-Martínez, J.; Seddaiu, M.; Rodríguez-Gonzálvez, P.; Hernández-López, D.; González-Aguilera, D. A multi-data source and multi-sensor approach for the 3D reconstruction and web visualization of a complex archaelogical site: The case study of “Tolmo De Minateda”. Remote Sens. 2016, 8, 550. [Google Scholar] [CrossRef]
- Jiménez Fernández-Palacios, B.; Stefani, C.; Lombardo, J.; De Luca, L.; Remondino, F. Web visualization of complex reality-based 3D models with NUBES. In Proceedings of the IEEE Conference Digital Heritage 2013, Marseille, France, 28 October–1 November 2013; Volume 1, pp. 701–704.
- Nubes Project. Available online: http://www.map.cnrs.fr/nubes/ (accessed on 25 December 2016).
- Cultural Heritage Information System Project. Available online: http://lrv.ugr.es/chis/en/ (accessed on 25 December 2016).
- Torres, J.C.; López, L.; Romo, C.; Arroyo, G.; Cano, P.; Lamolda, F.; Villafranca, M.M. Using a cultural heritage information system for the documentation of the restoration process. In Proceedings of the 2013 Digital Heritage, Marseille, France, 28 October–1 November 2013.
- Von Schwerin, J.; Richards-Rissetto, H.; Agugiaro, G.; Remondino, F.; Girardi, G. QueryArch3D: A 3D WebGIS System linking 3D visualizations to archaeological data. In Proceedings of the Computer Applications and Quantitative Methods in Archaeology, Southampton, UK, 26–30 March 2012.
- Prandi, F.; Devigili, F.; Soave, M.; Di Staso, U.; De Amicis, R. 3D web visualization of huge cityGML models. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2015, XL-3/W3, 601–605. [Google Scholar] [CrossRef]
- Conforti, D.; Zampa, F. Lynx mobile mapper for surveying city centers and highways. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2011, XXXVIII-5/W16, 219–222. [Google Scholar] [CrossRef]
- Hofmann, S.; Brenner, C. Accuracy assessment of mobile mapping point clouds using the existing environment as terrestrial reference. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2016, XLI-B1, 601–608. [Google Scholar] [CrossRef]
- Chan, T.O. Feature-Based Boresight Self-Calibration of a Mobile Mapping System. Master’s Thesis, University of Calgary, Calgary, AB, Canada, 2012. [Google Scholar]
- Grussenmeyer, P.; Landes, T.; Doneus, M.; Lerma, J. Basics of range-based modelling techniques in cultural heritage 3D recording. In 3D Recording, Documentation and Management of Cultural Heritage; Whittles Publishing: Dunbeath, UK, 2016. [Google Scholar]
- Schulz, T. Calibration of a Terrestrial Laser Scanner for Engineering Geodesy. Ph.D. Thesis, Technical University of Berlin, Berlin, Germany, 2007. [Google Scholar]
- Remondino, F. Heritage recording and 3D modeling with photogrammetry and 3D scanning. Remote Sens. 2011, 3, 1104–1138. [Google Scholar] [CrossRef] [Green Version]
- Gonzalez-Jorge, H.; Rodriguez-Gonzalvez, P.; Gonzalez-Aguilera, D.; Varela-Gonzalez, M. Metrological comparison of terrestrial laser scanning systems Riegl LMS Z390i and Trimble GX. Opt. Eng. 2011, 50, 116201–116209. [Google Scholar]
- González-Aguilera, D.; Rodríguez-Gonzálvez, P.; Armesto, J.; Arias, P. Trimble GX200 and Riegl LMS-Z390i sensor self-calibration. Opt. Express 2011, 19, 2676–2693. [Google Scholar] [CrossRef] [PubMed]
- Besl, P.J.; McKay, N.D. A method for registration of 3-d shapes. IEEE Trans. Pattern Anal. Mach. Intell. 1992, 14, 239–256. [Google Scholar] [CrossRef]
- Tombari, F.; Salti, S.; Di Stefano, L. Performance evaluation of 3D keypoint detectors. Int. J. Comput. Vis. 2013, 102, 198–220. [Google Scholar] [CrossRef]
- Akca, D. Full automatic registration of laser scanner point clouds. In Proceedings of the Optical 3-D Measurement Techniques VI, Zurich, Switzerland, 22–25 September 2003; pp. 330–337.
- Paparoditis, N.; Papelard, J.-P.; Cannelle, B.; Devaux, A.; Soheilian, B.; David, N.; Houzay, E. Stereopolis II: A multi-purpose and multi-sensor 3D mobile mapping system for street visualisation and 3D metrology. Rev. Fr. Photogramm. Télédétec. 2012, 200, 69–79. [Google Scholar]
- Toschi, I.; Rodríguez-Gonzálvez, P.; Remondino, F.; Minto, S.; Orlandini, S.; Fuller, A. Accuracy evaluation of a mobile mapping system with advanced statistical methods. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2015, XL-5/W4, 245–253. [Google Scholar] [CrossRef]
- Lague, D.; Brodu, N.; Leroux, J. Accurate 3D comparison of complex topography with terrestrial laser scanner: Application to the Rangitikei canyon (N-Z). ISPRS J. Photogramm. Remote Sens. 2013, 82, 10–26. [Google Scholar] [CrossRef]
- Höhle, J. The assessment of the absolute planimetric accuracy of airborne lasers canning. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2011, XXXVIII-5/W12, 145–150. [Google Scholar]
- Rodríguez-Gonzálvez, P.; Garcia-Gago, J.; Gomez-Lahoz, J.; González-Aguilera, D. Confronting passive and active sensors with non-gaussian statistics. Sensors 2014, 14, 13759–13777. [Google Scholar] [CrossRef] [PubMed]
- Cloud Compare v.2.7.0. Available online: www.danielgm.net/cc/ (accessed on 7 October 2016).
- Rodríguez-Gonzálvez, P.; González-Aguilera, D.; Hernández-López, D.; González-Jorge, H. Accuracy assessment of airborne laser scanner dataset by means of parametric and non-parametric statistical methods. IET Sci. Meas. Technol. 2015, 9, 505–513. [Google Scholar] [CrossRef]
- Levin, D. The approximation power of moving least-squares. Math. Comput. Am. Math. Soc. 1998, 67, 1517–1531. [Google Scholar] [CrossRef]
- Serna, M. Walls: Speaking of Towers, Battlements, Gates. Diario de Ávila, 13 October 2002. [Google Scholar]
- Mancera-Taboada, J.; Rodríguez-Gonzálvez, P.; González-Aguilera, D.; Muñoz-Nieto, Á.; Gómez-Lahoz, J.; Herrero-Pascual, J.; Picón-Cabrera, I. On the use of laser scanner and photogrammetry for the global digitization of the medieval walls of Avila. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2010, XXXVIII, 169–174. [Google Scholar]
- Haala, N.; Peter, M.; Cefalu, A.; Kremer, J. Mobile lidar mapping for urban data capture. In Proceedings of the 14th International Conference on Virtual Systems and Multimedia, Limassol, Cyprus, 20–25 October 2008; pp. 95–100.
- Rodríguez-Gonzálvez, P.; Nocerino, E.; Menna, F.; Minto, S.; Remondino, F. 3D surveying & modeling of underground passages in WWI fortifications. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2015, XL-5/W4, 17–24. [Google Scholar]
- Kurkin, A.; Pelinovsky, E.; Tyugin, D.; Kurkina, O.; Belyakov, V.; Makarov, V.; Zeziulin, D. Coastal remote sensing using unmanned ground vehicles. Int. J. Environ. Sci. 2016, 1, 183–189. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| MLS Technical Parameters | |
|---|---|
| X, Y position | 0.020 m |
| Z position | 0.050 m |
| Roll and pitch | 0.005° |
| True heading | 0.015° |
| Measuring principle | Time of Flight (ToF) |
| Maximum range | 200 m |
| Range precision | 8 mm (1σ) |
| Range accuracy | ±10 mm (1σ) |
| Laser measurement rate | 75–500 kHz |
| Measurement per laser pulse | Up to 4 simultaneous |
| Scan frequency | 80–200 Hz |
| Laser wavelength | 1550 nm (near infrared) |
| Scanner field of view | 360° |
| Operating temperature | 10–40 °C |
| Angular resolution | 0.001° |
| TLS Technical Parameters | |
|---|---|
| Measuring principle | Time of Flight (ToF) |
| Laser wavelength | 534 nm (visible-green) |
| Scanner field of view | 360° H × 60° V |
| Range precision | 1.4 mm at 50 m |
| Measurement range | 2–350 m |
| Spot size (beam diameter) | 3 mm a 50 m |
| Scanning speed | 5000 points/sec |
| Parameter | Value |
|---|---|
| Perimeter | 2516 m |
| No. of towers | 87 |
| No. of Battlement elements (current/original) | 2113/2379 |
| No. of gates | 9 |
| Width of the wall | Between 2.6 and 2.8 m |
| Average height of the wall | 11.5 m |
| Average height of the towers | 15 m |
| Trimble GX | LYNX Mobile Mapper | |
|---|---|---|
| Measuring principle | Time of Flight (ToF) | Time of Flight (ToF) |
| Range | 350 m to 90% reflectivity | 250 m to 10% reflectivity |
| 200 m to 35% reflectivity | ||
| 155 m to 18% reflectivity | ||
| Resolution | 15 mm | 60 mm |
| Scanning speed | up to 5000 points per second | up to 500 lines/sec |
| Scanned area (approximate) | 30,000 m2 | 250,000 m2 |
| No. of stations | 98 | 1 |
| No. of points | 300,000,000 | 185,000,000 |
| No. of images | 215 | 420 |
| Geodetic reference system-projection | ETRS89 and UTM30 | ETRS89 and UTM30 |
| Acquisition time | 150 h (laser) + 4 h (camera) + 5 h (GNSS) | 1 h |
| Processing time | 435 h | 15 h |
| Statistics | Value | ||
|---|---|---|---|
| East | South | Global | |
| Mean | 0.003 m | 0.008 m | 0.005 m |
| Standard deviation | ±0.026 m | ±0.017 m | ±0.023 m |
| Median | 0.003 m | 0.007 m | 0.005 m |
| MAD | ±0.015 m | ±0.006 m | ±0.011 m |
| Quantile 25 | −0.011 m | 0.000 m | −0.006 m |
| Quantile 75 | 0.019 m | 0.013 m | 0.016 m |
| Cluster Curvature | Classification Legend | Initial Points | Components * | Reallocated Components | Reallocated Points | Final Points |
|---|---|---|---|---|---|---|
| Low | Blue | 236,832 | 2022 | 1975 (97.7%) | 13,716 (5.8%) | 223,116 |
| Medium | Green | 263,580 | 1610 | 1563 (97.1%) | 18,576 (7.0%) | 258,720 |
| High | Red | 20,654 | - | - | - | 39,230 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license ( http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Rodríguez-Gonzálvez, P.; Jiménez Fernández-Palacios, B.; Muñoz-Nieto, Á.L.; Arias-Sanchez, P.; Gonzalez-Aguilera, D. Mobile LiDAR System: New Possibilities for the Documentation and Dissemination of Large Cultural Heritage Sites. Remote Sens. 2017, 9, 189. https://doi.org/10.3390/rs9030189
Rodríguez-Gonzálvez P, Jiménez Fernández-Palacios B, Muñoz-Nieto ÁL, Arias-Sanchez P, Gonzalez-Aguilera D. Mobile LiDAR System: New Possibilities for the Documentation and Dissemination of Large Cultural Heritage Sites. Remote Sensing. 2017; 9(3):189. https://doi.org/10.3390/rs9030189
Chicago/Turabian StyleRodríguez-Gonzálvez, Pablo, Belén Jiménez Fernández-Palacios, Ángel Luis Muñoz-Nieto, Pedro Arias-Sanchez, and Diego Gonzalez-Aguilera. 2017. "Mobile LiDAR System: New Possibilities for the Documentation and Dissemination of Large Cultural Heritage Sites" Remote Sensing 9, no. 3: 189. https://doi.org/10.3390/rs9030189
APA StyleRodríguez-Gonzálvez, P., Jiménez Fernández-Palacios, B., Muñoz-Nieto, Á. L., Arias-Sanchez, P., & Gonzalez-Aguilera, D. (2017). Mobile LiDAR System: New Possibilities for the Documentation and Dissemination of Large Cultural Heritage Sites. Remote Sensing, 9(3), 189. https://doi.org/10.3390/rs9030189