
Mapping the Expansion of Boom Crops in Mainland Southeast Asia Using Dense Time Stacks of Landsat Data

 , and
, and
Abstract
:
1. Introduction
2. Materials and Methods
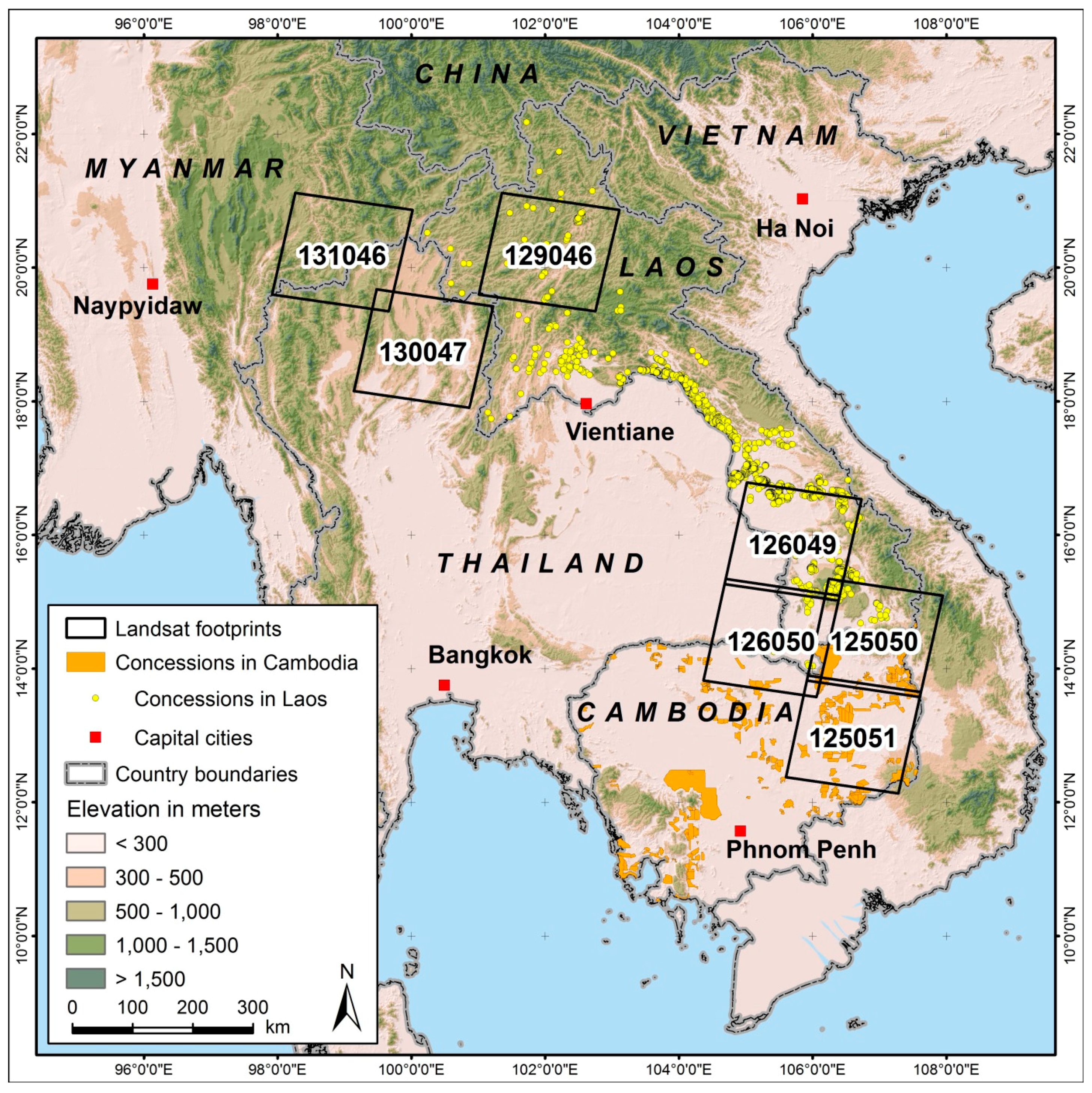
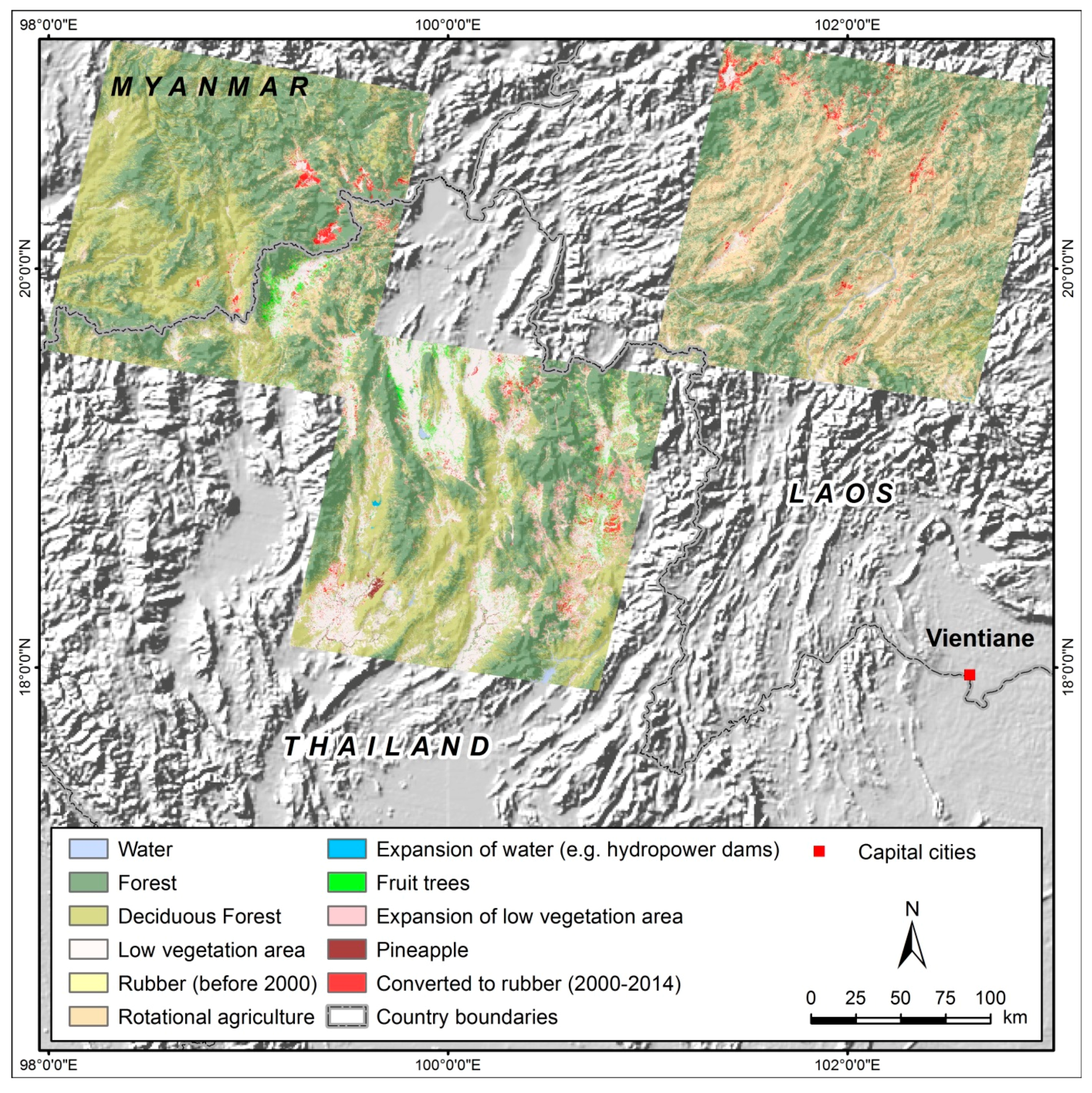
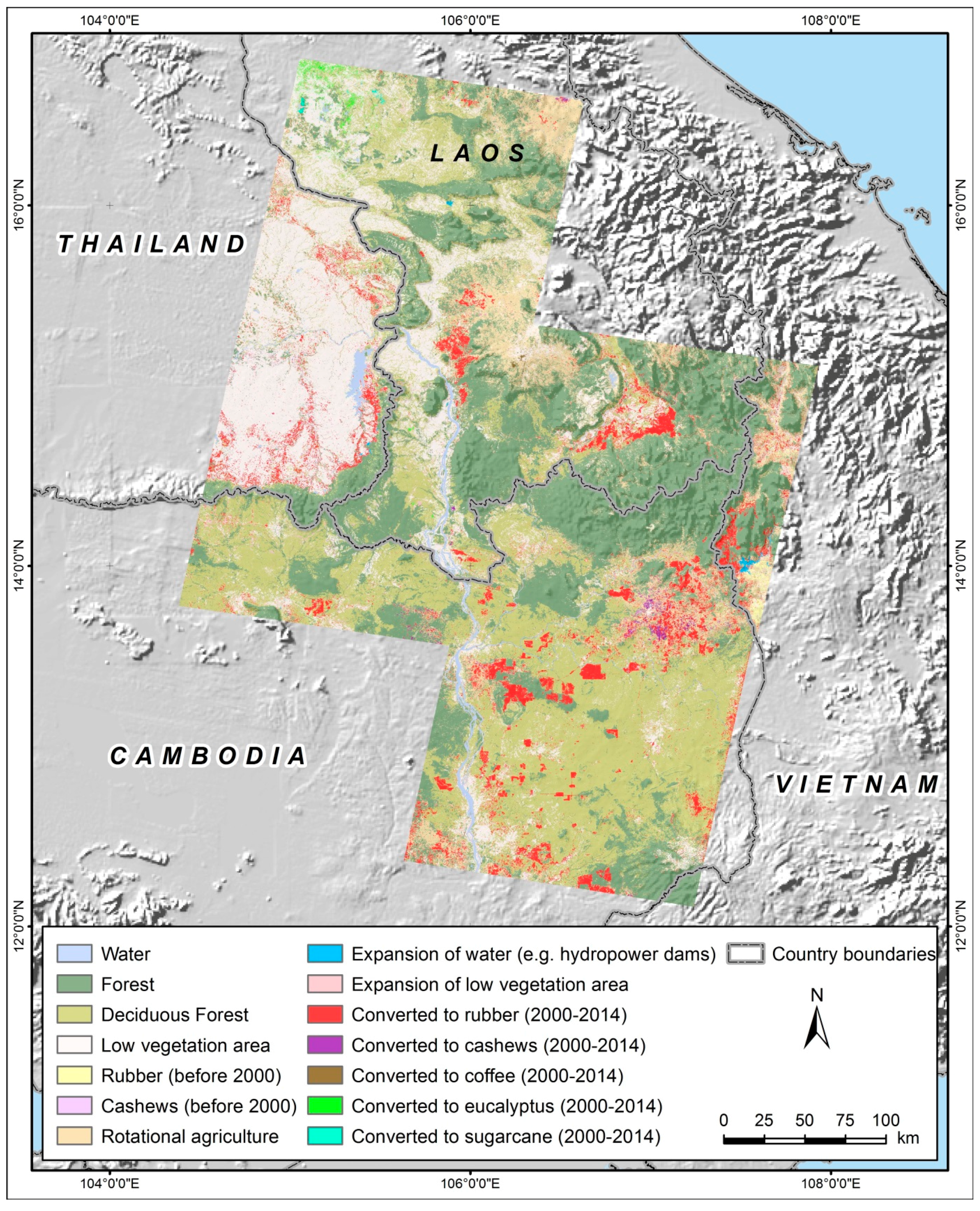
2.1. Study Area
2.2. Data Sets and Initial Processing
2.3. Classification Scheme and Training and Verification Data
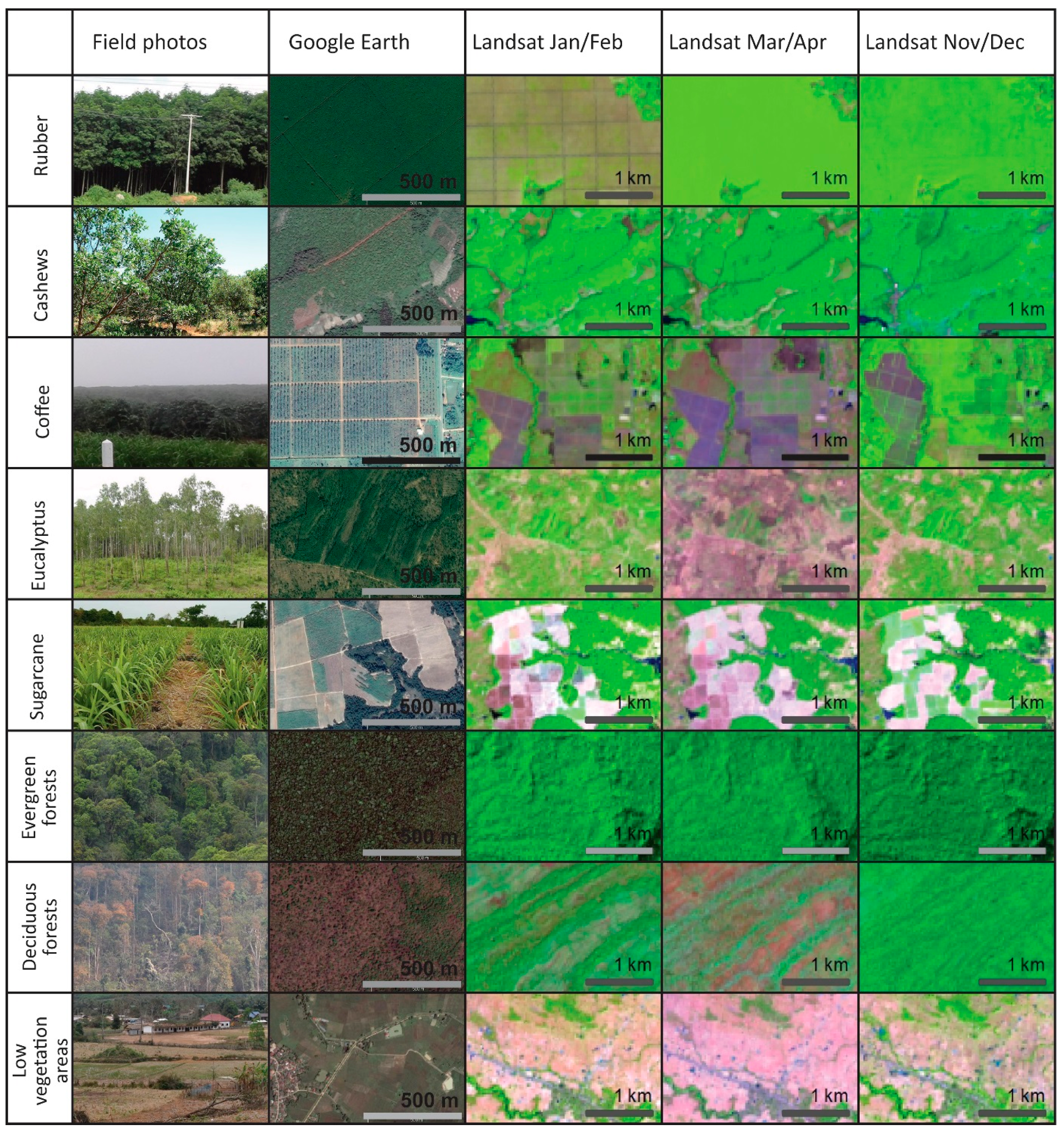
- We linked the field photos and concession inventories with Google Earth high resolution images and multi-seasonal NDVI composites of Landsat data. Visual interpretation of plantation structures (e.g., tree alignment and distance, canopy shapes) in the high resolution data and specific colors of multi-seasonal NDVI composites (visualizing land-cover phenology) allowed us to identify and label land-cover in locations where field photos or concession inventories were not available.
- Next, we checked the historic high resolution images and the Landsat time series year by year for land-cover changes.
- After defining the time and location of changed areas, we used the multi-seasonal NDVI composites and historic high resolution data (when available) to label the land-cover prior to conversion.
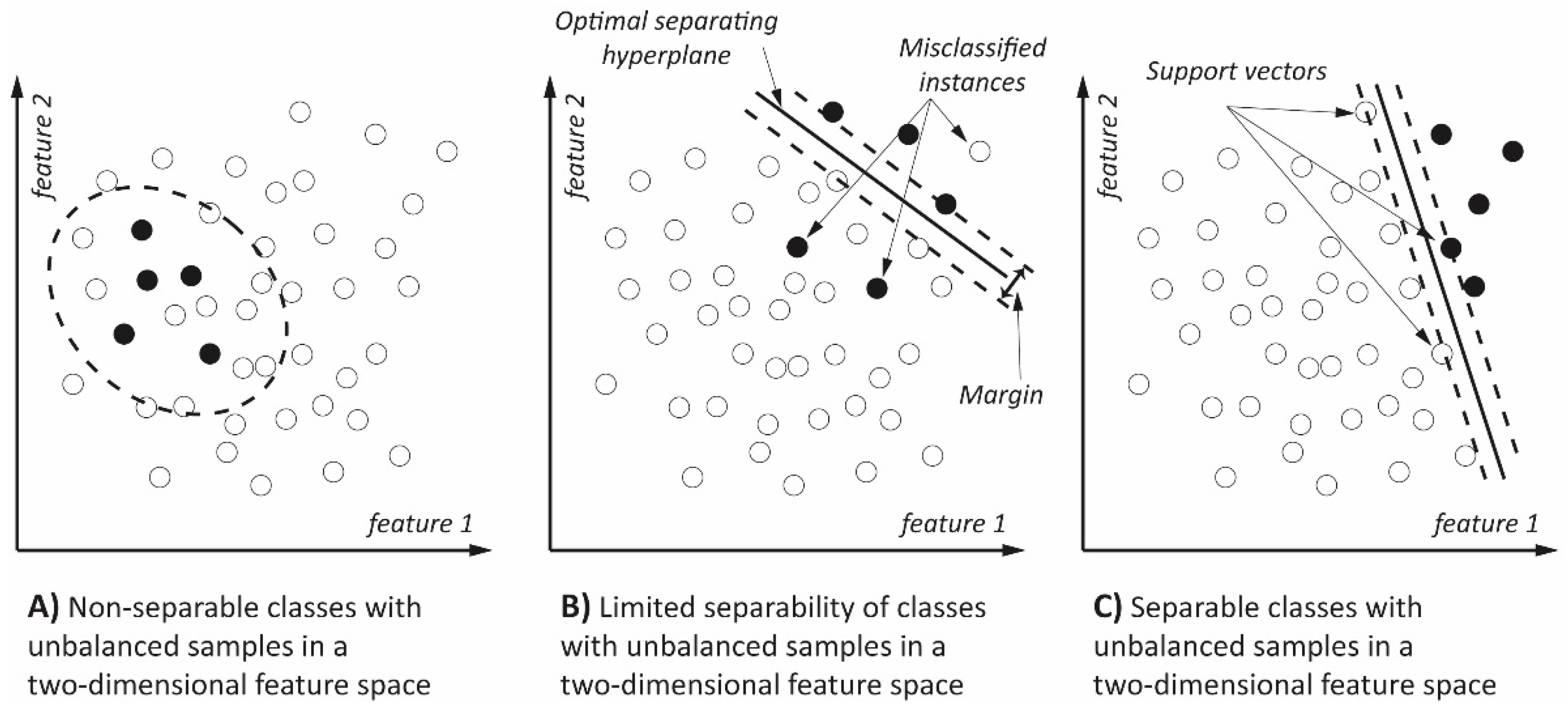
2.4. Support Vector Machines for Change Detection
3. Results
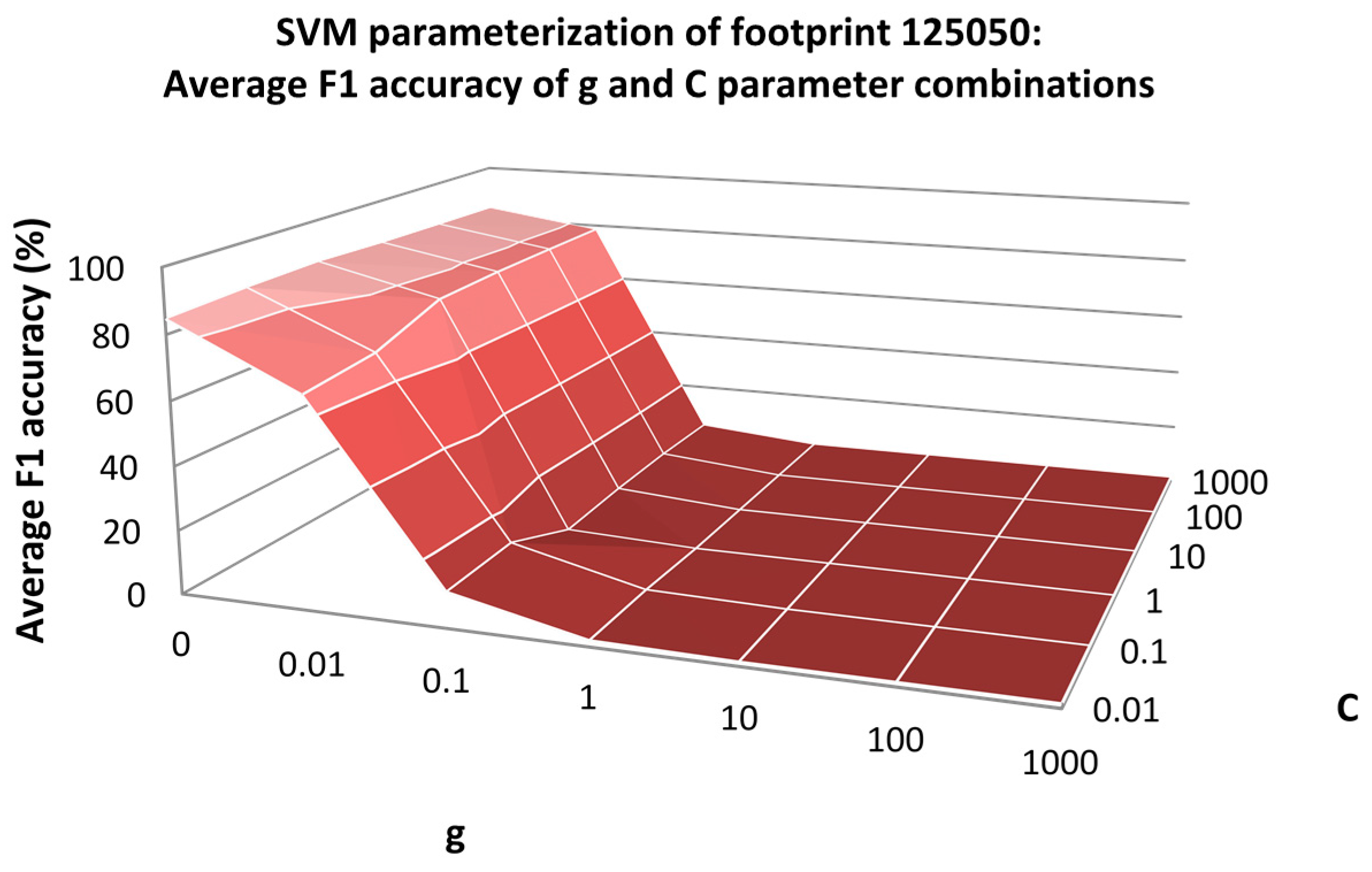
3.1. Parameterization of the Classifier
3.2. Accuracy Assessment
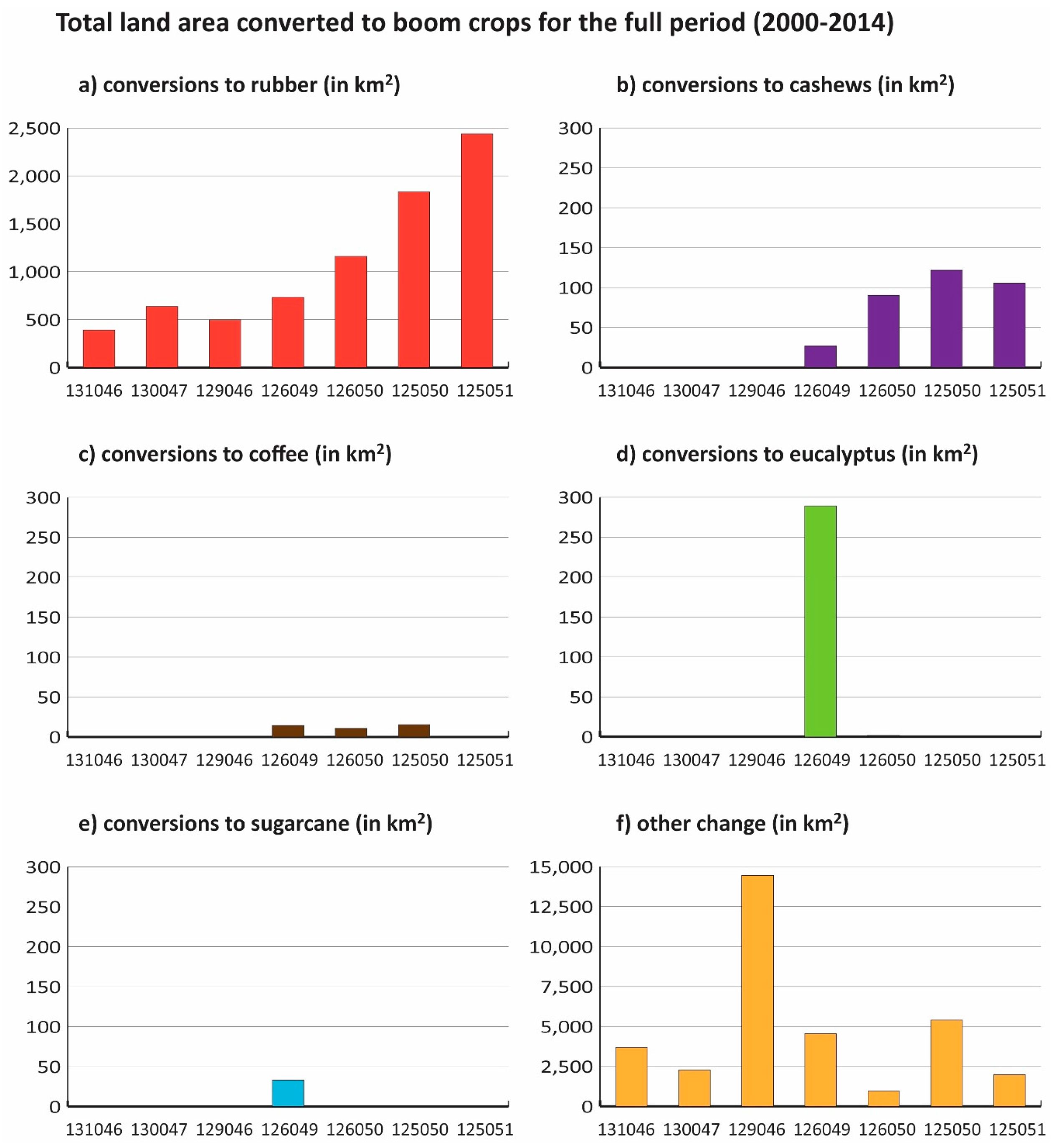
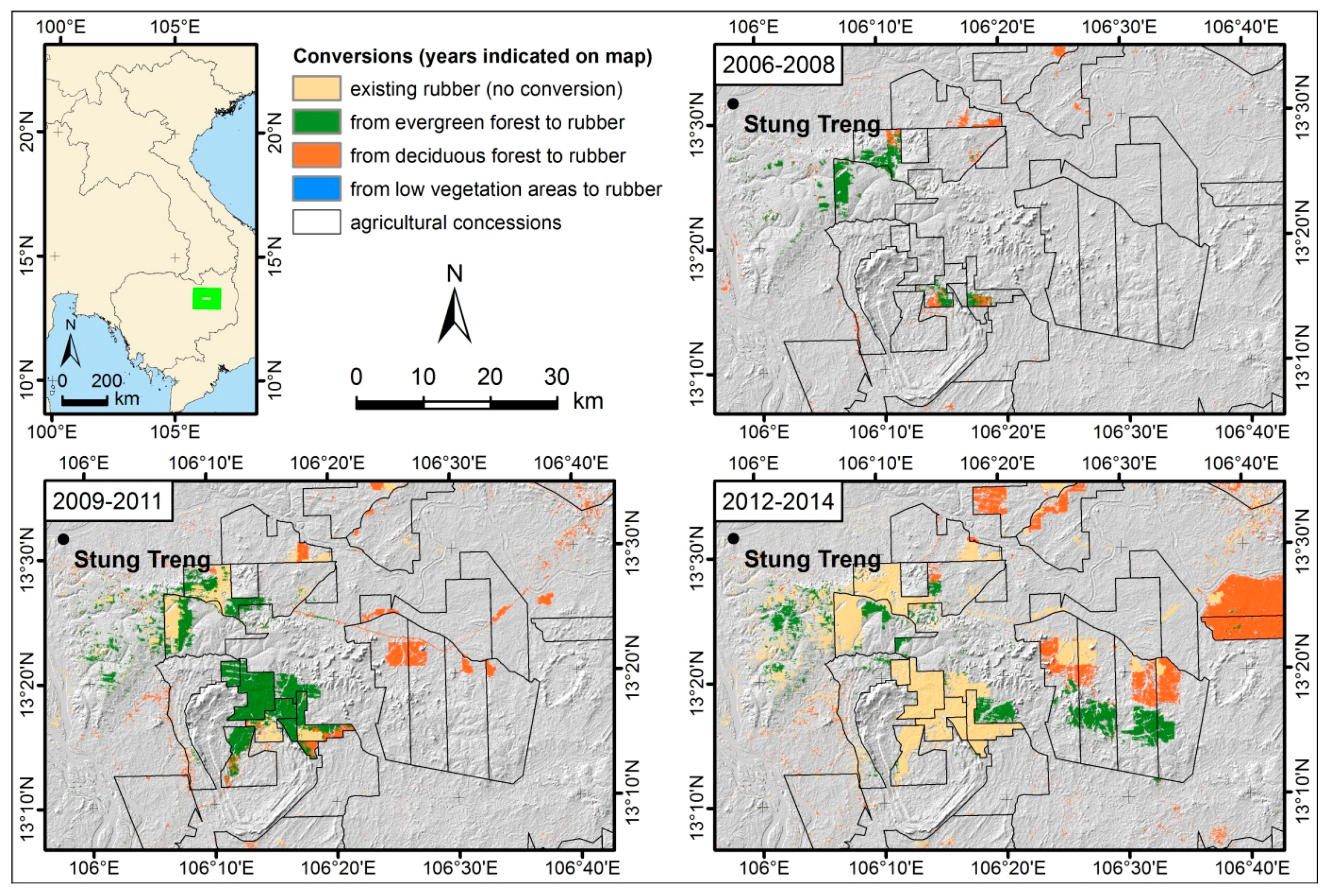
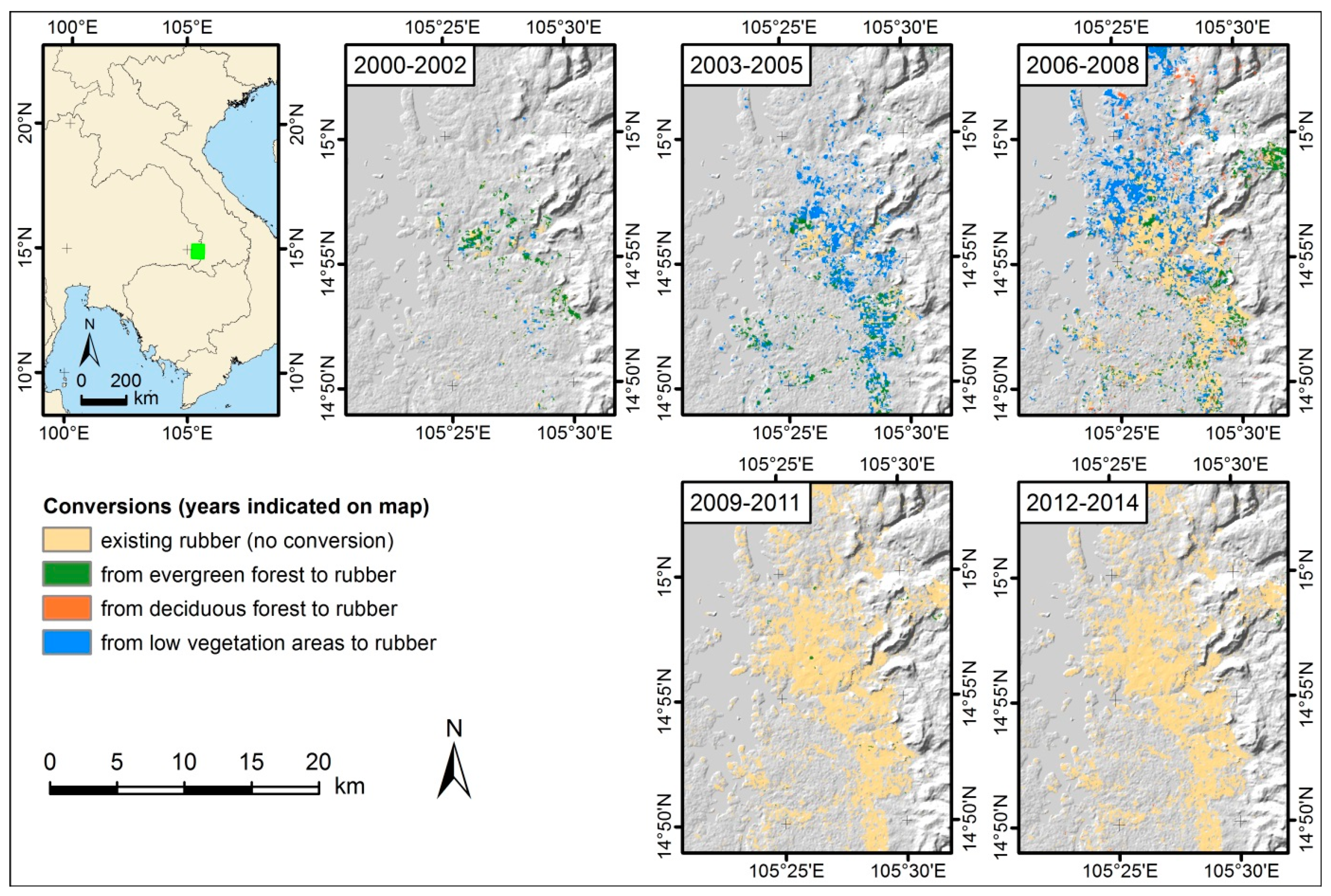
3.3. Land-Cover Change Trajectories
4. Discussion
5. Conclusions
Supplementary Materials
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Fox, J.; Castella, J.C. Expansion of rubber (Hevea brasiliensis) in Mainland Southeast Asia: What are the prospects for smallholders? J. Peasant Stud. 2013, 40, 155–170. [Google Scholar] [CrossRef]
- Heinimann, A.; Hett, C.; Hurni, K.; Messerli, P.; Epprecht, M.; Jørgensen, L.; Breu, T. Socio-Economic Perspectives on Shifting Cultivation Landscapes in Northern Laos. Hum. Ecol. 2013, 41, 51–62. [Google Scholar] [CrossRef]
- Schönweger, O.; Heinimann, A.; Epprecht, M.; Lu, J.; Thalongsengchanh, P. Concessions and Leases in the Lao PDR: Taking Stock of Land Investments; Centre for Development and Environment (CDE), University of Bern: Bern, Switzerland, 2012; p. 87. [Google Scholar]
- Hall, D.; Hirsch, P.; Li, T.M. Powers of Exclusion: Land Dilemmas in Southeast Asia; University of Hawaii Press: Honolulu, HI, USA, 2011; p. 320. [Google Scholar]
- Hall, D. The International Political Ecology of Industrial Shrimp Aquaculture and Industrial Plantation Forestry in Southeast Asia. J. Southeast Asian Stud. 2003, 34, 251–264. [Google Scholar] [CrossRef]
- Li, Z.; Fox, J.M. Integrating Mahalanobis typicalities with a neural network for rubber distribution mapping. Remote Sens. Lett. 2011, 2, 157–166. [Google Scholar] [CrossRef]
- Barney, K. Laos and the making of a ‘relational’ resource frontier. Geogr. J. 2009, 175, 146–159. [Google Scholar]
- Baird, I.G. Land, rubber and people: Rapid agrarian change and responses in Southern Laos. J. Lao Stud. 2010, 1, 47. [Google Scholar]
- Baird, I.G. Turning Land into Capital, Turning People into Labor: Primitive Accumulation and the Arrival of Large-Scale Economic Land Concessions in the Lao People’s Democratic Republic. New Propos. 2011, 5, 16. [Google Scholar]
- Baird, I.G.; Fox, J. How Land Concessions Affect Places Elsewhere: Telecoupling, Political Ecology, and Large-Scale Plantations in Southern Laos and Northeastern Cambodia. Land 2015, 4, 436–453. [Google Scholar] [CrossRef]
- Dwyer, M. Turning Land into Capital. A Review of Recent Research on Land Concessions for Investment in the Lao PDR; CIDSE-Laos, Plan International: Vientiane, Laos, 2007. [Google Scholar]
- Chen, B.Q.; Cao, J.H.; Wang, J.K.; Wu, Z.X.; Tao, Z.L.; Chen, J.M.; Yang, C.; Xie, G.S. Estimation of rubber stand age in typhoon and chilling injury afflicted area with Landsat TM data: A case study in Hainan Island, China. For. Ecol. Manag. 2012, 274, 222–230. [Google Scholar] [CrossRef]
- Li, H.; Aide, T.M.; Ma, Y.; Liu, W.; Cao, M. Demand for rubber is causing the loss of high diversity rain forest in SW China. Biodivers. Conserv. 2007, 16, 1731–1745. [Google Scholar] [CrossRef]
- Suratman, M.N.; Bull, G.Q.; Leckie, D.G.; Lemay, V.M.; Marshall, P.L. Modeling stand volume of rubber (Hevea Brasiliensis) plantations in Malaysia using Landsat TM. Sci. Lett. 2004, 1, 65–71. [Google Scholar]
- Kumagai, T.; Mudd, R.G.; Giambelluca, T.W.; Kobayashi, N.; Miyazawa, Y.; Lim, T.K.; Liu, W.; Huang, M.Y.; Fox, J.M.; Ziegler, A.D.; et al. How do rubber (Hevea Brasiliensis) plantations behave under seasonal water stress in northeastern Thailand and central Cambodia? Agric. For. Meteorol. 2015, 213, 10–22. [Google Scholar] [CrossRef]
- Phompila, C.; Lewis, M.; Clarke, K.; Ostendorf, B. Monitoring expansion of plantations in Lao tropical forests using Landsat time series. In Proceedings of the SPIE Conference on Land Surface Remote Sensing II, Beijing, China, 13 October 2014. [Google Scholar]
- Fan, H.; Fu, X.H.; Zhang, Z.; Wu, Q. Phenology-Based Vegetation Index Differencing for Mapping of Rubber Plantations Using Landsat OLI Data. Remote Sens. 2015, 7, 6041–6058. [Google Scholar] [CrossRef]
- Grogan, K.; Pflugmacher, D.; Hostert, P.; Kennedy, R.; Fensholt, R. Cross-border forest disturbance and the role of natural rubber in mainland Southeast Asia using annual Landsat time series. Remote Sens. Environ. 2015, 169, 438–453. [Google Scholar] [CrossRef]
- Dong, J.; Xiao, X.; Chen, B.; Torbick, N.; Jin, C.; Zhang, G.; Biradar, C. Mapping deciduous rubber plantations through integration of PALSAR and multi-temporal Landsat imagery. Remote Sens. Environ. 2013, 134, 392–402. [Google Scholar] [CrossRef]
- Dong, J.; Xiao, X.; Sheldon, S.; Biradar, C.; Xie, G. Mapping tropical forests and rubber plantations in complex landscapes by integrating PALSAR and MODIS imagery. ISPRS J. Photogramm. Remote Sens. 2012, 74, 20–33. [Google Scholar] [CrossRef]
- Kou, W.L.; Xiao, X.M.; Dong, J.W.; Gan, S.; Zhai, D.L.; Zhang, G.L.; Qin, Y.W.; Li, L. Mapping Deciduous Rubber Plantation Areas and Stand Ages with PALSAR and Landsat Images. Remote Sens. 2015, 7, 1048–1073. [Google Scholar] [CrossRef]
- Chen, B.; Li, X.; Xiao, X.; Zhao, B.; Dong, J.; Kou, W.; Qin, Y.; Yang, C.; Wu, Z.; Sun, R.; et al. Mapping tropical forests and deciduous rubber plantations in Hainan Island, China by integrating PALSAR 25-m and multi-temporal Landsat images. Int. J. Appl. Earth Obs. Geoinf. 2016, 50, 117–130. [Google Scholar] [CrossRef]
- Torbick, N.; Ledoux, L.; Salas, W.; Zhao, M. Regional Mapping of Plantation Extent Using Multisensor Imagery. Remote Sens. 2016, 8. [Google Scholar] [CrossRef]
- Li, Z.; Fox, J.M. Mapping rubber tree growth in mainland Southeast Asia using time-series MODIS 250 m NDVI and statistical data. Appl. Geogr. 2012, 32, 420–432. [Google Scholar] [CrossRef]
- Senf, C.; Pflugmacher, D.; van der Linden, S.; Hostert, P. Mapping Rubber Plantations and Natural Forests in Xishuangbanna (Southwest China) Using Multi-Spectral Phenological Metrics from MODIS Time Series. Remote Sens. 2013, 5, 2795–2812. [Google Scholar] [CrossRef]
- Inoue, Y.; Kiyono, Y.; Asai, H.; Ochiai, Y.; Qi, J.; Olioso, A.; Shiraiwa, T.; Horie, T.; Saito, K.; Dounagsavanh, L. Assessing land-use and carbon stock in slash-and-burn ecosystems in tropical mountain of Laos based on time-series satellite images. Int. J. Appl. Earth Obs. Geoinf. 2010, 12, 287–297. [Google Scholar] [CrossRef]
- Kontgis, C.; Schneider, A.; Ozdogan, M. Mapping rice paddy extent and intensification in the Vietnamese Mekong River Delta with dense time stacks of Landsat data. Remote Sens. Environ. 2015, 169, 255–269. [Google Scholar] [CrossRef]
- Scholarspace of the University of Hawaii (Download of the Classification Samples and Maps). Available online: https://scholarspace.manoa.hawaii.edu/handle/10125/43976 (accessed on 7 March 2017).
- FAOSTAT—Food and Agricutlure Organization of the United Nations—Statistics Division. Available online: http://faostat3.fao.org/ (accessed on 15 April 2016).
- Delarue, J.; Chambon, B. La Thailande: Premier exportateur de caoutchouc naturel grâce à ses agriculteurs familiaux. Économie Rurale 2012, 330–331, 191–213. [Google Scholar] [CrossRef]
- Trébuil, G.; Ekasingh, B.; Ekasingh, M. Agricultural Commercialisation, Diversification, and Conservation of Renewable Resources in Northern Thailand Highlands. Moussons 2006, 9–10, 131–155. [Google Scholar] [CrossRef]
- Meyfroidt, P.; Vu, T.P.; Hoang, V.A. Trajectories of deforestation, coffee expansion and displacement of shifting cultivation in the Central Highlands of Vietnam. Glob. Environ. Chang. 2013, 23, 1187–1198. [Google Scholar]
- Fujita, Y.; Phanvilay, K. Land and Forest Allocation in Lao People’s Democratic Republic: Comparison of Case Studies from Community-Based Natural Resource Management Research. Soc. Nat. Resour. 2008, 21, 120–133. [Google Scholar] [CrossRef]
- Alton, C.; Blum, D.; Sananikone, S. Para Rubber Study: Hevea Brasiliensis Lao PDR; GTZ, Lao German Program for Rural Development in Mountainous Areas of Northern Lao PDR: Vientiane, Laos, 2005; p. 108. [Google Scholar]
- Neef, A.; Touch, S.; Chiengthong, J. The Politics and Ethics of Land Concessions in Rural Cambodia. J. Agric. Environ. Ethics 2013, 26, 1085–1103. [Google Scholar] [CrossRef]
- Open Development Cambodia (ODC). Available online: http://www.opendevelopmentcambodia.net/ (accessed on 10 August 2016).
- Kattelus, M.; Rahaman, M.M.; Varis, O. Myanmar under reform: Emerging pressures on water, energy and food security. Nat. Resour. Forum 2014, 38, 85–98. [Google Scholar] [CrossRef]
- Woods, K. Ceasefire capitalism: Military–private partnerships, resource concessions and military–state building in the Burma–China borderlands. J. Peasant Stud. 2011, 38, 747–770. [Google Scholar]
- Bunyavejchevin, S. Analysis of the Tropical Dry Deciduous Forest of Thailand, I. Characteristics of the Dominance-Types. Nat. Hist. Bull. Siam Soc. 1983, 31, 14. [Google Scholar]
- Le Maire, G.; Marsden, C.; Nouvellon, Y.; Grinand, C.; Hakamada, R.; Stape, J.-L.; Laclau, J.-P. MODIS NDVI time-series allow the monitoring of Eucalyptus plantation biomass. Remote Sens. Environ. 2011, 115, 2613–2625. [Google Scholar] [CrossRef]
- Tucker, C.J.; Grant, D.M.; Dykstra, J.D. NASA’s global orthorectified landsat data set. Photogramm. Eng. Remote Sens. 2004, 70, 313–322. [Google Scholar] [CrossRef]
- U.S.G.S. EarthExplorer. Available online: https://earthexplorer.usgs.gov/ (accessed on 7 April 2015).
- Schneider, A. Monitoring land cover change in urban and pen-urban areas using dense time stacks of Landsat satellite data and a data mining approach. Remote Sens. Environ. 2012, 124, 689–704. [Google Scholar] [CrossRef]
- Castrence, M.; Nong, D.; Tran, C.; Young, L.; Fox, J. Mapping Urban Transitions Using Multi-Temporal Landsat and DMSP-OLS Night-Time Lights Imagery of the Red River Delta in Vietnam. Land 2014, 3, 148–166. [Google Scholar] [CrossRef]
- Landsat Processing Details. Available online: http://landsat.usgs.gov/Landsat_Processing_Details.php (accessed on 18 February 2016).
- Song, C.; Woodcock, C.E.; Seto, K.C.; Lenney, M.P.; Macomber, S.A. Classification and Change Detection Using Landsat TM Data: When and How to Correct Atmospheric Effects? Remote Sens. Environ. 2001, 75, 230–244. [Google Scholar]
- U.S. Geological Survey (USGS). Product Guide: Landsat 4–7 Climate Data Record (CDR) Surface Reflectance. Volume 6.1; U.S. Geological Survey: Reston, VA, USA, 2015; p. 27.
- U.S. Geological Survey (USGS). Product Guide: Provisional Landsat 8 Surface Reflectance Product. Version 1.8; U.S. Geological Survey: Reston, VA, USA, 2015; p. 27.
- Boussema, M.R.; Naceur, M.S.; Elmannai, H. Perceptron nonlinear blind source separation for feature extraction and image classification. In Proceedings of the 3rd International Conference on Image Processing Theory, Tools and Applications, Istanbul, Turkey, 15–18 October 2012; pp. 259–263. [Google Scholar]
- Melgani, F.; Bruzzone, L. Classification of hyperspectral remote sensing images with support vector machines. IEEE Trans. Geosci. Remote Sens. 2004, 42, 1778–1790. [Google Scholar] [CrossRef]
- Villa, A.; Fauvel, M.; Chanussot, J.; Gamba, P.; Benediktsson, J.A. Gradient Optimization for multiple kernel’s parameters in support vector machines classification. In Proceedings of the IEEE International Geoscience and Remote Sensing Symposium, Boston, MA, USA, 7–11 July 2008. [Google Scholar]
- Van der Linden, S.; Rabe, A.; Held, M.; Wirth, F.; Suess, S.; Okujeni, A.; Hostert, P. ImageSVM Classification, Manual for Applicaton: ImageSVM Version 3.0; Humboldt-Universität zu Berlin: Berlin, Germany, 2014. [Google Scholar]
- Mountrakis, G.; Im, J.; Ogole, C. Support vector machines in remote sensing: A review. ISPRS J. Photogramm. Remote Sens. 2011, 66, 247–259. [Google Scholar] [CrossRef]
- Attarchi, S.; Gloaguen, R. Classifying Complex Mountainous Forests with L-Band SAR and Landsat Data Integration: A Comparison among Different Machine Learning Methods in the Hyrcanian Forest. Remote Sens. 2014, 6, 3624–3647. [Google Scholar] [CrossRef]
- Chen, Z.X.; Wang, L.M.; Wu, W.B.; Jiang, Z.W.; Li, H. Monitoring Plastic-Mulched Farmland by Landsat-8 OLI Imagery Using Spectral and Textural Features. Remote Sens. 2016, 8, 353. [Google Scholar] [CrossRef]
- Huang, C.; Davis, L.S.; Townshend, J.R.G. An assessment of support vector machines for land cover classification. Int. J. Remote Sens. 2002, 23, 725–749. [Google Scholar] [CrossRef]
- Jia, K.; Liang, S.L.; Wei, X.Q.; Yao, Y.J.; Su, Y.R.; Jiang, B.; Wang, X.X. Land Cover Classification of Landsat Data with Phenological Features Extracted from Time Series MODIS NDVI Data. Remote Sens. 2014, 6, 11518–11532. [Google Scholar] [CrossRef]
- Kumar, P.; Prasad, R.; Choudhary, A.; Mishra, V.N.; Gupta, D.K.; Srivastava, P.K. A statistical significance of differences in classification accuracy of crop types using different classification algorithms. Geocarto Int. 2017, 32, 206–224. [Google Scholar]
- Laurin, G.V.; Puletti, N.; Hawthorne, W.; Liesenberg, V.; Corona, P.; Papale, D.; Chen, Q.; Valentini, R. Discrimination of tropical forest types, dominant species, and mapping of functional guilds by hyperspectral and simulated multispectral Sentinel-2 data. Remote Sens. Environ. 2016, 176, 163–176. [Google Scholar] [CrossRef]
- Nooni, I.K.; Duker, A.A.; Van Duren, I.; Addae-Wireko, L.; Jnr, E.M.O. Support vector machine to map oil palm in a heterogeneous environment. Int. J. Remote Sens. 2014, 35, 4778–4794. [Google Scholar] [CrossRef]
- Vanonckelen, S.; Lhermitte, S.; Van Rompaey, A. The effect of atmospheric and topographic correction on pixel-based image composites: Improved forest cover detection in mountain environments. Int. J. Appl. Earth Obs. Geoinf. 2015, 35, 320–328. [Google Scholar] [CrossRef]
- Brown, M.; Gunn, S.R.; Lewis, H.G. Support vector machines for optimal classification and spectral unmixing. Ecol. Model. 1999, 120, 167–179. [Google Scholar] [CrossRef]
- libSVM. RBF SVM Parameters. Available online: http://scikit-learn.org/stable/auto_examples/svm/plot_rbf_parameters.html (accessed on 18 February 2016).
- Rabe, S.; van der Linden, S.; Hostert, P. Imagesvm, Version 3.0; Humboldt-Universität zu Berlin: Berlin, Germany, 2014. [Google Scholar]
- ENVI. Support Vectore Machine Background. Available online: http://www.exelisvis.com/docs/BackgroundSVM.html (accessed on 22 February 2016).
- Hsu, C.W.; Chang, C.C.; Lin, C.J. A Practical Guide to Support Vector Classification; Department of Computer Science, National Taiwan University: Taipei, Taiwan, 2010. [Google Scholar]
- Smith, J.H.; Stehman, S.V.; Wickham, J.D.; Yang, L. Effects of landscape characteristics on land-cover class accuracy. Remote Sens. Environ. 2003, 84, 342–349. [Google Scholar] [CrossRef]
- Burges, C.J.C. A Tutorial on Support Vector Machines for Pattern Recognition. Data Min. Knowl. Discov. 1998, 2, 121–167. [Google Scholar] [CrossRef]
- Fox, J.; McMahon, D.; Poffenberger, M.; Vogler, J. Land for My Grandchildren: Land Use and Tenure Change in Ratanakiri: 1989–2007; Community Forestry International: Phnom Penh, Cambodia, 2008; p. 75. [Google Scholar]
- Cohen, W.; Fiorella, M. Comparison of methods for detecting conifer forest change with Thematic Mapper imagery. In Remote Sensing Change Detection: Environmental Monitoring Methods and Applications; Lunetta, R.S., Elvidge, C.D., Eds.; Ann Arbor Press: Chelsea, MI, USA, 1998; pp. 89–102. [Google Scholar]
- Coppin, P.; Jonckheere, I.; Nackaerts, K.; Muys, B.; Lambin, E. Digital change detection methods in ecosystem monitoring: A review. Int. J. Remote Sens. 2004, 25, 1565–1596. [Google Scholar] [CrossRef]
- Hall, R.J.; Crown, P.H.; Titus, S.J. Change Detection Methodology for Aspen Defoliation with Landsat Mss Digital Data. Can. J. Remote Sens. 1984, 10, 135–142. [Google Scholar] [CrossRef]
- Rogan, J.; Chen, D. Remote sensing technology for mapping and monitoring land-cover and land-use change. Prog. Plan. 2004, 61, 301–325. [Google Scholar] [CrossRef]
- Kontgis, C.; Schneider, A.; Fox, J.; Saksena, S.; Spencer, J.H.; Castrence, M. Monitoring peri-urbanization in the greater Ho Chi Minh City metropolitan area. Appl. Geogr. 2014, 53, 377–388. [Google Scholar] [CrossRef]
- Nong, D.; Fox, J.; Miura, T.; Saksena, S. Built-up Area Change Analysis in Hanoi Using Support Vector Machine Classification of Landsat Multi-Temporal Image Stacks and Population Data. Land 2015, 4. [Google Scholar] [CrossRef]
- Stefanov, W.L.; Ramsey, M.S.; Christensen, P.R. Monitoring urban land cover change: An expert system approach to land cover classification of semiarid to arid urban centers. Remote Sens. Environ. 2001, 77, 173–185. [Google Scholar] [CrossRef]
- Shao, Y.; Lunetta, R.S. Comparison of support vector machine, neural network, and CART algorithms for the land-cover classification using limited training data points. ISPRS J. Photogramm. Remote Sens. 2012, 70, 78–87. [Google Scholar] [CrossRef]
- Woodcock, C.E.; Macomber, S.A.; Pax-Lenney, M.; Cohen, W.B. Monitoring large areas for forest change using Landsat: Generalization across space, time and Landsat sensors. Remote Sens. Environ. 2001, 78, 194–203. [Google Scholar] [CrossRef]
- Knorn, J.; Rabe, A.; Radeloff, V.C.; Kuemmerle, T.; Kozak, J.; Hostert, P. Land cover mapping of large areas using chain classification of neighboring Landsat satellite images. Remote Sens. Environ. 2009, 113, 957–964. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
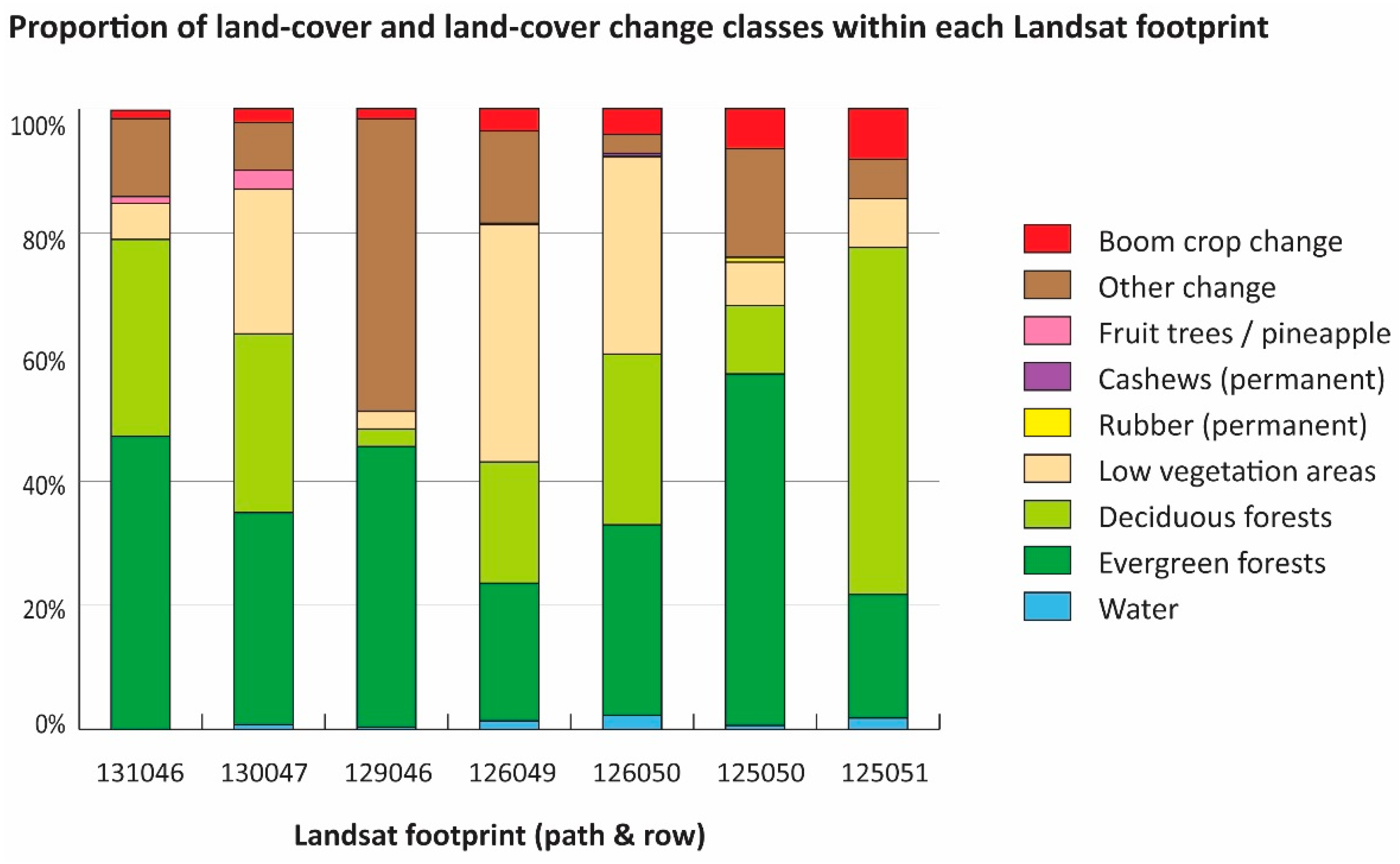
| Landsat Footprint | Countries | Primary Land Use/Land Cover Types | Primary Boom Crops |
|---|---|---|---|
| 131046 | Myanmar, Thailand | Evergreen and deciduous forests, low vegetation areas with mainly agriculture (Thailand) | Rubber, fruit trees (Thailand) |
| 130047 | Thailand | Low vegetation areas with mainly agriculture, evergreen and deciduous forests | Rubber, fruit trees, pineapple |
| 129046 | Laos | Evergreen forests, cropland/fallow land mosaic (rotational agriculture) | Rubber |
| 126049 | Laos, Thailand | Low vegetation areas with mainly agriculture, evergreen and deciduous forests, cropland/fallow land mosaic (rotational agriculture, Laos) | Rubber, sugarcane, eucalyptus (Laos) |
| 126050 | Cambodia, Laos, Thailand | Low vegetation areas with mainly agriculture, evergreen and deciduous forests | Rubber, cashews, eucalyptus |
| 125050 | Cambodia, Laos, Vietnam | Evergreen and deciduous forests | Rubber, coffee (Laos), cashews (Cambodia) |
| 125051 | Cambodia | Evergreen and deciduous forests | Rubber, cashews |
| 2000–2002 | 2003–2005 | 2006–2008 | 2009–2011 | 2012–2014 | |
|---|---|---|---|---|---|
| No change | Water | ||||
| Evergreen forests (EF) | |||||
| Deciduous forests (DF) | |||||
| Low vegetation areas (LVA) | |||||
| Rubber | |||||
| Cashews | |||||
| Pineapple | |||||
| Orchards/fruit trees | |||||
| Boom crop change | Rubber from EF | Rubber from EF | Rubber from EF | Rubber from EF | Rubber from EF |
| Rubber from DF | Rubber from DF | Rubber from DF | Rubber from DF | Rubber from DF | |
| Rubber from LVA | Rubber from LVA | Rubber from LVA | Rubber from LVA | Rubber from LVA | |
| Cashews from EF | Cashews from EF | Cashews from EF | Cashews from EF | Cashews from EF | |
| Cashews from DF | Cashews from DF | Cashews from DF | Cashews from DF | Cashews from DF | |
| Cashews from LVA | Cashews from LVA | Cashews from LVA | Cashews from LVA | Cashews from LVA | |
| Coffee from EF | Coffee from EF | Coffee from EF | Coffee from EF | Coffee from EF | |
| Coffee from DF | Coffee from DF | Coffee from DF | Coffee from DF | Coffee from DF | |
| Coffee from LVA | Coffee from LVA | Coffee from LVA | Coffee from LVA | Coffee from LVA | |
| Eucalyptus from EF | Eucalyptus from EF | Eucalyptus from EF | Eucalyptus from EF | Eucalyptus from EF | |
| Eucalyptus from DF | Eucalyptus from DF | Eucalyptus from DF | Eucalyptus from DF | Eucalyptus from DF | |
| Eucalyptus from LVA | Eucalyptus from LVA | Eucalyptus from LVA | Eucalyptus from LVA | Eucalyptus from LVA | |
| Sugarcane from EF | Sugarcane from EF | Sugarcane from EF | Sugarcane from EF | Sugarcane from EF | |
| Sugarcane from DF | Sugarcane from DF | Sugarcane from DF | Sugarcane from DF | Sugarcane from DF | |
| Sugarcane from LVA | Sugarcane from LVA | Sugarcane from LVA | Sugarcane from LVA | Sugarcane from LVA | |
| Other change | Rotational agriculture | ||||
| Expansion of low vegetation areas | |||||
| New hydropower dams | |||||
| Footprint | Overall Accuracy (%) | F1 Measure (%) | C | g | Number of Bands | Number of Classes | Number of Samples |
|---|---|---|---|---|---|---|---|
| 131046 | 86.6 | 86 | 1000 | 0 | 408 | 19 | 1816 |
| 130047 | 89.6 | 84.3 | 0.1 | 0 | 391 | 19 | 2389 |
| 129046 | 84.7 | 86 | 0.01 | 0 | 446 | 12 | 2805 |
| 126049 | 87.8 | 82.4 | 0.01 | 0 | 415 | 31 | 3108 |
| 126050 | 89.9 | 85.6 | 0.1 | 0 | 419 | 29 | 3173 |
| 125050 | 85.4 | 84.7 | 1 | 0 | 365 | 23 | 2316 |
| 125051 | 93.3 | 91.4 | 0.1 | 0 | 440 | 19 | 3528 |
| Footprint | No Change | Boom Crop Change | Other Change | |||
|---|---|---|---|---|---|---|
| UA (%) | PA (%) | UA (%) | PA (%) | UA (%) | PA (%) | |
| 131046 | 91.4 | 90.7 | 85.7 | 85.0 | 64.9 | 68.5 |
| 130047 | 92.7 | 96.6 | 84.0 | 84.0 | 91.3 | 55.3 |
| 129046 | 88.4 | 85.8 | 84.1 | 81.1 | 81.9 | 87.1 |
| 126049 | 92.3 | 92.8 | 89.0 | 85.1 | 69.1 | 80.7 |
| 126050 | 95.0 | 96.8 | 83.8 | 81.9 | 85.1 | 83.8 |
| 125050 | 85.9 | 87.1 | 87.3 | 89.0 | 73.2 | 63.1 |
| 125051 | 90.2 | 92.7 | 95.0 | 95.9 | 82.4 | 60.9 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hurni, K.; Schneider, A.; Heinimann, A.; Nong, D.H.; Fox, J. Mapping the Expansion of Boom Crops in Mainland Southeast Asia Using Dense Time Stacks of Landsat Data. Remote Sens. 2017, 9, 320. https://doi.org/10.3390/rs9040320
Hurni K, Schneider A, Heinimann A, Nong DH, Fox J. Mapping the Expansion of Boom Crops in Mainland Southeast Asia Using Dense Time Stacks of Landsat Data. Remote Sensing. 2017; 9(4):320. https://doi.org/10.3390/rs9040320
Chicago/Turabian StyleHurni, Kaspar, Annemarie Schneider, Andreas Heinimann, Duong H. Nong, and Jefferson Fox. 2017. "Mapping the Expansion of Boom Crops in Mainland Southeast Asia Using Dense Time Stacks of Landsat Data" Remote Sensing 9, no. 4: 320. https://doi.org/10.3390/rs9040320
APA StyleHurni, K., Schneider, A., Heinimann, A., Nong, D. H., & Fox, J. (2017). Mapping the Expansion of Boom Crops in Mainland Southeast Asia Using Dense Time Stacks of Landsat Data. Remote Sensing, 9(4), 320. https://doi.org/10.3390/rs9040320