Novel Decomposition Scheme for Characterizing Urban Air Quality with MODIS



Abstract
:
1. Introduction
2. Methodology
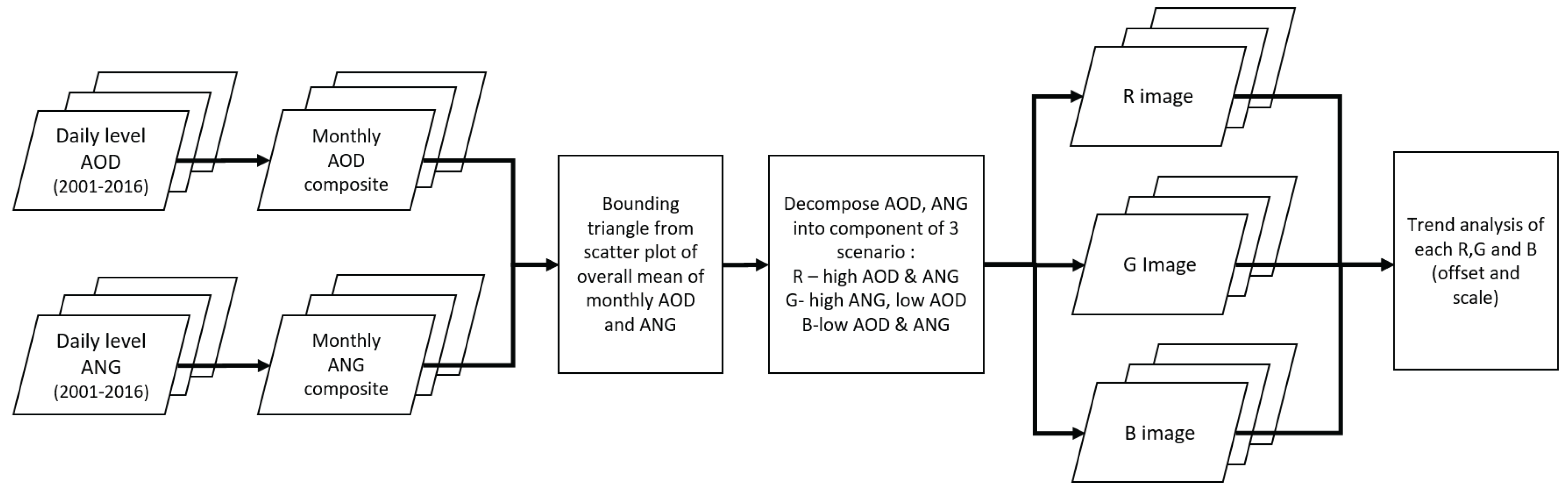
2.1. Study Location and Flowchart
2.2. Datasets Used
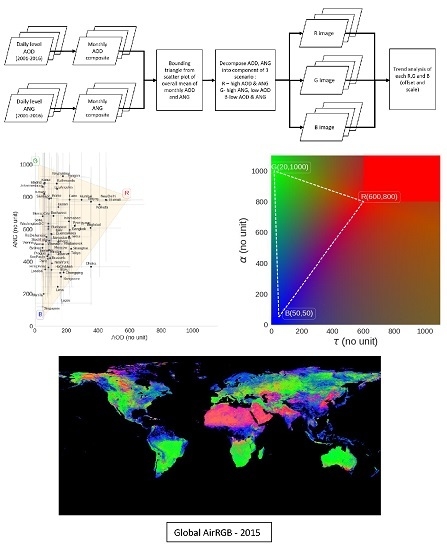
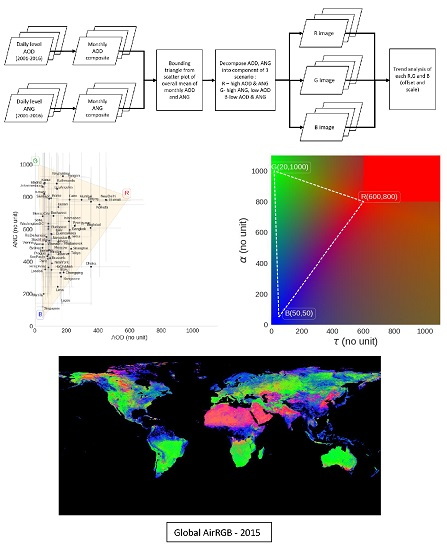
2.3. AirRGB Decomposition and Visualization
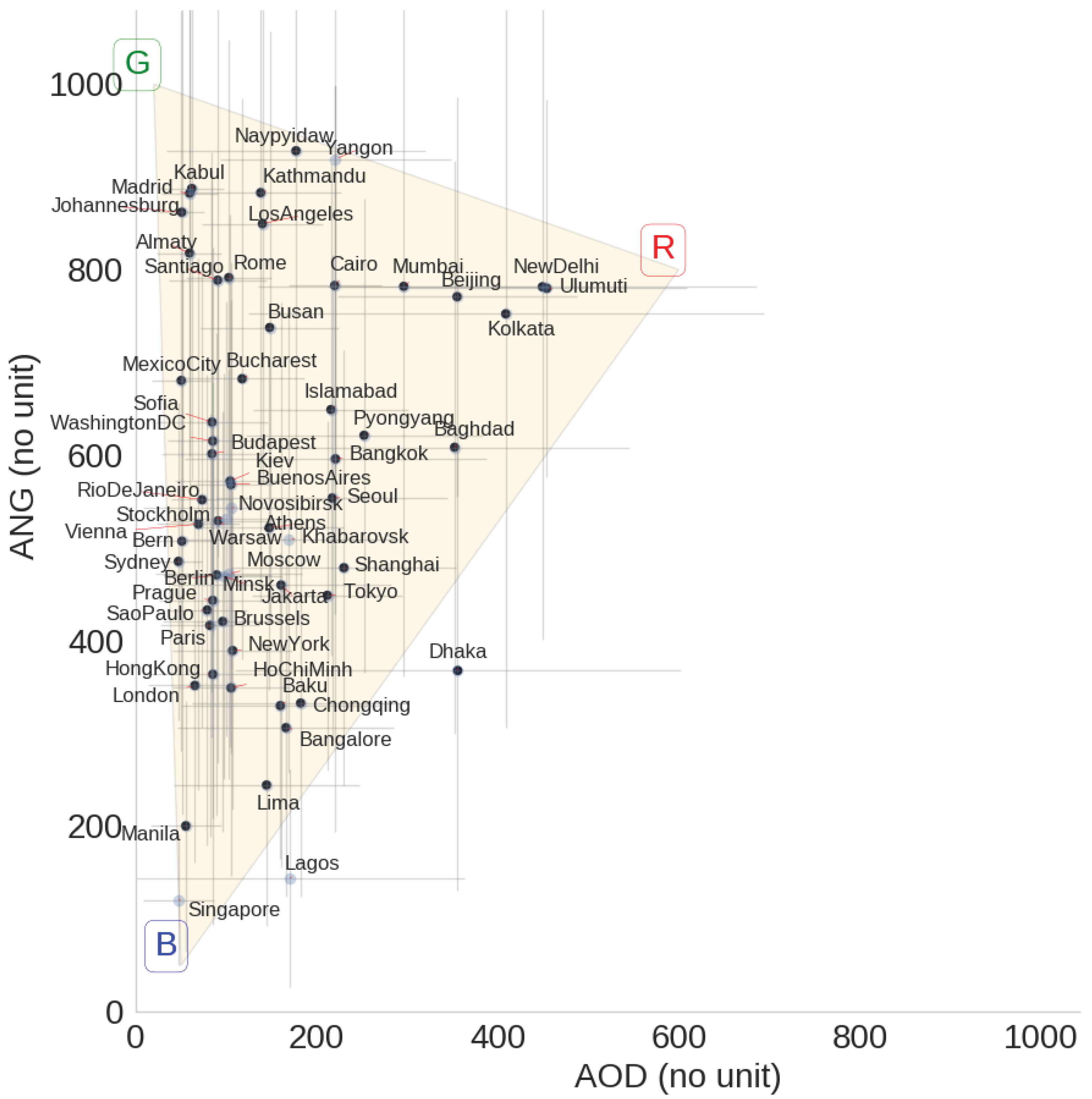
- For each urban location, the overall mean of monthly (from year 2001 to 2016) and AOD values of its central pixel were plotted on y and x-axis, respectively. The central pixel refers to the pixel corresponding to the city center. It was chosen to deal with cities (specially megacities) that are spread across several MODIS pixels (e.g., New York). This scheme is unlikely to affect the AOD and estimates since neighboring pixels have similar values over an urban area [44].
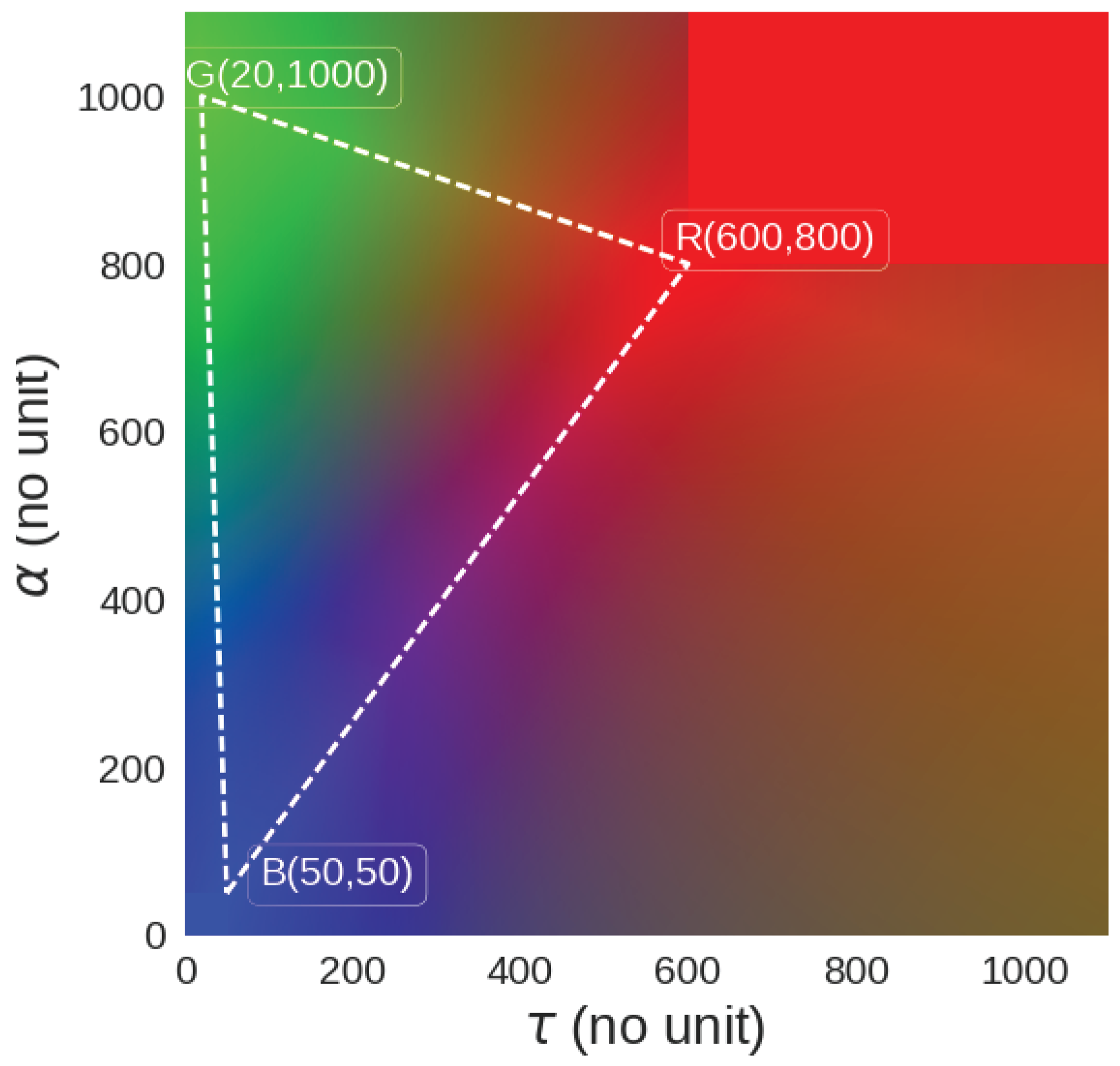
- Consider a bounding triangle, , such that its vertices corresponding to a) high and high AOD, (b) high and low AOD and, (c) low and low AOD are labeled as , , and , respectively. and B correspond to the colors red, green and blue (the color assigned to the vertex is irrelevant, but, in this paper, it is considered in the same fashion to ensure consistency).
- For any coordinate C () lying inside , decompose it over 3-band RGB-scale by first computing its distance metric from each vertex ( and B) as and . Thereafter, a distance vector l is derived by normalizing each distance metric by the side opposite to the corresponding vertex in , i.e., and , respectively. l is given for a general point coordinate C as:whereFor intuitive understanding of Equation (3), suppose that proximity of C is increasing to a vertex of . Then, components of l corresponding to other vertices will start decreasing to zero. The distance components for any vertex is in fact the sum of the area of two rectangles formed between C and each of the other vertices. For example, in Figure 3, component is the sum of yellow and green rectangles. Note that as C approaches towards either R or B vertices, linearly reduces to zero.
- For RGB color representation, values for channel [R, G, B] are normalized by maximum possible distance vector and multiplied by 100. It is given as:where
- For locations whose aerosol coordinates lie outside , is set as per the following rule:
2.4. Uncertainty Estimation and Validation
3. Result and Discussion
3.1. AirRGB Decomposition Parameters
3.2. Global AirRGB Visualization
3.3. AirRGB Trend of Cities
3.4. Global AirRGB Component Trend
3.4.1. Global Trend of R
3.4.2. Global Trend of G
3.4.3. Global Trend of B
3.5. Uncertainty and Validation
3.5.1. Uncertainty
3.5.2. Validation
4. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- United Nations General Assembly. Transforming Our World: The 2030 Agenda for Sustainable Development. 2015. Available online: http://www.un.org/ga/search/viewdoc.asp?symbol=A/RES/70/1 (accessed on 2 August 2017).
- World Health Organization. Ambient (Outdoor) Air Pollution in Cities Database 2014. Available online: http://www.who.int/phe/healthtopics/outdoorair/databases/cities-2014/en/ (accessed on 2 August 2017).
- Takemura, T.; Uno, I.; Nakajima, T.; Higurashi, A.; Sano, I. Modeling study of long-range transport of Asian dust and anthropogenic aerosols from East Asia. Geophys. Res. Lett. 2002, 29, 11-1–11-4. [Google Scholar]
- Mayer, H. Air pollution in cities. Atmos. Environ. 1999, 33, 4029–4037. [Google Scholar]
- Mage, D.; Ozolins, G.; Peterson, P.; Webster, A.; Orthofer, R.; Vandeweerd, V.; Gwynne, M. Urban Air Pollution in Megacities of the World. Atmos. Environ. 1996, 30, 681–686. [Google Scholar]
- Srivastava, A.; Gupta, S.; Jain, V.K. Source Apportionment of Total Suspended Particulate Matter in Coarse and Fine Size Ranges Over Delhi. Aerosol Air Qual. Res. 2008, 8, 188–200. [Google Scholar]
- Begum, B.A.; Biswas, S.K.; Hopke, P.K. Key issues in controlling air pollutants in Dhaka, Bangladesh. Atmos. Environ. 2011, 45, 7705–7713. [Google Scholar]
- Castanho, D.A.A.; Artaxo, P. Wintertime and summertime Sao Paulo aerosol source apportionment study. Atmos. Environ. 2001, 35, 4889–4902. [Google Scholar]
- Zhang, R.; Jing, J.; Tao, J.; Hsu, S.; Wang, G.; Cao, J.; Lee, C.; Zhu, L.; Chen, Z.; Zhao, Y.; et al. Chemical characterization and source apportionment of PM2.5 in Beijing: Seasonal perspective. Atmos. Chem. Phys. 2013, 13, 7053–7074. [Google Scholar]
- Belis, C.A.; Karagulian, F.; Larsen, B.R.; Hopke, P.K. Critical review and meta-analysis of ambient particulate matter source apportionment using receptor models in Europe. Atmos. Environ. 2013, 69, 94–108. [Google Scholar]
- Baldasano, J.M.; Valera, E.; Jiménez, P. Air quality data from large cities. Sci. Total Environ. 2003, 307, 141–165. [Google Scholar]
- Gupta, P.; Christopher, S.A.; Wang, J.; Gehrig, R.; Lee, Y.; Kumar, N. Satellite remote sensing of particulate matter and air quality assessment over global cities. Atmos. Environ. 2006, 40, 5880–5892. [Google Scholar]
- Gurjar, B.R.; Butler, T.M.; Lawrence, M.G.; Lelieveld, J. Evaluation of emissions and air quality in megacities. Atmos. Environ. 2008, 42, 1593–1606. [Google Scholar]
- Ångström, A. On the atmospheric transmission of Sun radiation and on dust in the air. Geogr. Ann. 1929, 11, 156–166. [Google Scholar]
- Dubovik, O.; Holben, B.; Eck, T.F.; Smirnov, A.; Kaufman, Y.J.; King, M.D.; Tanré, D.; Slutsker, I. Variability of Absorption and Optical Properties of Key Aerosol Types Observed in Worldwide Locations. J. Atmos. Sci. 2002, 59, 590–608. [Google Scholar]
- Eck, T.F.; Holben, B.N.; Reid, J.S.; Dubovik, O.; Smirnov, A.; O’Neill, N.T.; Slutsker, I.; Kinne, S. Wavelength dependence of the optical depth of biomass burning, urban, and desert dust aerosols. J. Geophys. Res. 1999, 104, 31333. [Google Scholar]
- Nakajima, T.; Higurashi, A. A use of two-channel radiances for an aerosol characterization from space. Geophys. Res. Lett. 1998, 25, 3815–3818. [Google Scholar]
- Eldering, A.; Cass, G.R. An air monitoring network using continuous particle size distribution monitors: Connecting properties to visibility via Mie scattering calculations. Atmos. Environ. 1994, 28, 2733–2749. [Google Scholar]
- Baumer, D.; Vogel, B.; Versick, S.; Rinke, R.; Mohler, O.; Schnaiter, M. Relationship of visibility, aerosol optical thickness and aerosol size distribution in an ageing air mass over South-West Germany. Atmos. Environ. 2008, 42, 989–998. [Google Scholar]
- NASA Worldview. Available online: https://worldview.earthdata.nasa.gov/ (accessed on 2 August 2017).
- NASA Earthdata Giovanni. Available online: https://giovanni.gsfc.nasa.gov/giovanni/ (accessed on 2 August 2017).
- United Nations. World Economic Situation Prospects 2014; United Nations Publication: New York, NY, USA, 2014. [Google Scholar]
- Hsu, N.C.; Tsay, S.C.; King, M.D.; Member, S.; Herman, J.R. Aerosol Properties Over Bright-Reflecting Source Regions. IEEE Trans. Geosci. Remote Sens. 2004, 42, 557–569. [Google Scholar]
- Bibi, H.; Alam, K.; Chishtie, F.; Bibi, S.; Shahid, I.; Blaschke, T. Intercomparison of MODIS, MISR, OMI, and CALIPSO aerosol optical depth retrievals for four locations on the Indo-Gangetic plains and validation against AERONET data. Atmos. Environ. 2015, 111, 113–126. [Google Scholar]
- Ginoux, P.; Prospero, J.M.; Gill, T.E.; Hsu, N.C.; Zhao, M. Global-scale attribution of anthropogenic and natural dust sources and their emission rates based on modis deep blue aerosol products. Rev. Geophys. 2012, 50, 1–36. [Google Scholar]
- Payra, S.; Soni, M.; Kumar, A.; Prakash, D.; Verma, S. Intercomparison of Aerosol Optical Thickness Derived from MODIS and in Situ Ground Datasets over Jaipur, a Semi-arid Zone in India. Environ. Sci. Technol. 2015, 49, 9237–9246. [Google Scholar]
- Hsu, N.C.; Jeong, M.J.; Bettenhausen, C.; Sayer, A.M.; Hansell, R.; Seftor, C.S.; Huang, J.; Tsay, S.C. Enhanced Deep Blue aerosol retrieval algorithm: The second generation. J. Geophys. Res. Atmos. 2013, 118, 9296–9315. [Google Scholar]
- Tao, M.; Chen, L.; Wang, Z.; Tao, J.; Che, H.; Wang, X.; Wang, Y. Comparison and evaluation of the MODIS Collection 6 aerosol data in China. J. Geophys. Res. Atmos. 2015, 120, 6992–7005. [Google Scholar]
- Bilal, M.; Nichol, J.E. Evaluation of MODIS aerosol retrieval algorithms over the Beijing-Tianjin-Hebei region during low to very high pollution events. J. Geophys. Res. Atmos. 2015, 120, 7941–7957. [Google Scholar]
- Sayer, A.M.; Hsu, N.C.; Bettenhausen, C.; Jeong, M.J.; Meister, G. Effect of MODIS Terra radiometric calibration improvements on Collection 6 Deep Blue aerosol products: Validation and Terra/Aqua consistency. J. Geophys. Res. Atmos. 2015, 120, 157–174. [Google Scholar]
- Sayer, A.M.; Hsu, N.C.; Bettenhausen, C.; Jeong, M. Validation and uncertainty estimates for MODIS Collection 6 “Deep Blue” aerosol data. J. Geophys. Res. Atmos. 2013, 118, 7864–7872. [Google Scholar]
- Sayer, A.M.; Munchak, L.A.; Hsu, N.C.; Levy, R.C.; Bettenhausen, C.; Jeong, M. MODIS Collection 6 aerosol products: Comparison between Aqua’s e-Deep Blue, Dark Target, and “merged” data sets, and usage recommendations. J. Geophys. Res. Atmos. 2014, 119, 13965–13989. [Google Scholar]
- Roy, D.P.; Lewis, P.; Schaaf, C.B.; Devadiga, S.; Boschetti, L. The global impact of clouds on the production of MODIS bidirectional reflectance model-based composites for terrestrial monitoring. IEEE Geosci. Remote Sens. Lett. 2006, 3, 452–456. [Google Scholar]
- Hubanks, P.; Platnick, S.; King, M.; Ridgway, B. MODIS Atmosphere L3 Gridded Product Plgorithm Pheoretical Basis Document (ATBD) & Users Guide. 2016. Available online: https://modis-images.gsfc.nasa.gov/_docs/L3_ATBD_C6.pdf (accessed on 2 August 2017).
- Levy, R.C.; Leptoukh, G.G.; Kahn, R.; Zubko, V.; Gopalan, A.; Remer, L.A. A critical look at deriving monthly aerosol optical depth from satellite data. IEEE Trans. Geosci. Remote Sens. 2009, 47, 2942–2956. [Google Scholar]
- U.S. Department of State. U.S Embassy Beijing Air Quality Monitor. Available online: https://china.usembassy-china.org.cn/embassy-consulates/beijing/air-quality-monitor (accessed on 2 August 2017).
- U.S. Department of State. Beijing—PM2.5. Available online: http://www.stateair.net/web/post/1/1 (accessed on 2 August 2017).
- Wang, J.F.; Hu, M.G.; Xu, C.D.; Christakos, G.; Zhao, Y. Estimation of Citywide Air Pollution in Beijing. PLoS ONE 2013, 8, 1–6. [Google Scholar]
- Jiang, J.; Zhou, W.; Cheng, Z.; Wang, S.; He, K.; Hao, J. Particulate Matter Distributions in China during a Winter Period with Frequent Pollution Episodes (January 2013). Aerosol Air Qual. Res. 2015, 10, 494–503. [Google Scholar]
- Putman, W.M.; Ott, L.; Darmenov, A.; da Silva, A. A global perspective of atmospheric carbon dioxide concentrations. Parallel Comput. 2016, 55, 2–8. [Google Scholar]
- Penning de Vries, M.J.M.; Beirle, S.; Hörmann, C.; Kaiser, J.W.; Stammes, P.; Tilstra, L.G.; Tuinder, O.N.E. A global aerosol classification algorithm incorporating multiple satellite data sets of aerosol and trace gas abundances. Atmos. Chem. Phys. 2015, 15, 10597–10618. [Google Scholar]
- Mukai, S.; Nishina, M.; Sano, I.; Mukai, M.; Iguchi, N.; Mizobuchi, S. Suspended particulate matter sampling at an urban AERONET site in Japan, part 1: Clustering analysis of aerosols. J. Appl. Remote Sens. 2007, 1, 13518. [Google Scholar]
- Sano, I.; Mukai, M.; Iguchi, N.; Mukai, S. Suspended particulate matter sampling at an urban AERONET site in Japan, part 2: Relationship between column aerosol optical thickness and PM2.5 concentration. J. Appl. Remote Sens. 2010, 4, 43504. [Google Scholar]
- Mi, W.; Li, Z.; Xia, X.; Holben, B.; Levy, R.; Zhao, F.; Chen, H.; Cribb, M. Evaluation of the Moderate Resolution Imaging Spectroradiometer aerosol products at two Aerosol Robotic Network stations in China. J. Geophys. Res. 2007, 112, 1–14. [Google Scholar]
- Levy, R.C.; Remer, L.A.; Kleidman, R.G.; Mattoo, S.; Ichoku, C.; Kahn, R.; Eck, T.F. Global evaluation of the Collection 5 MODIS dark-target aerosol products over land. Atmos. Chem. Phys. 2010, 10, 10399–10420. [Google Scholar] [Green Version]
- Klimont, Z.; Smith, S.J.; Cofala, J. The last decade of global anthropogenic sulfur dioxide: 2000–2011 emissions. Environ. Res. Lett. 2013, 8, 1–6. [Google Scholar]
- McLinden, C.A.; Fioletov, V.; Shephard, M.W.; Krotkov, N.; Li, C.; Martin, R.V.; Moran, M.D.; Joiner, J. Space-based detection of missing sulfur dioxide sources of global air pollution. Nat. Geosci. 2016, 9, 1–7. [Google Scholar]
- Borge, R.; Lumbreras, J.; Pérez, J.; de la Paz, D.; Vedrenne, M.; de Andrés, J.M.; Rodríguez, M.E. Emission inventories and modeling requirements for the development of air quality plans. Application to Madrid (Spain). Sci. Total Environ. 2014, 466–467, 809–819. [Google Scholar]
- Wang, S.; Zhao, M.; Xing, J.; Wu, Y.; Zhou, Y.; Lei, Y.; He, K.; Fu, L.; Hao, J. Quantifying the air pollutants emission reduction during the 2008 olympic games in Beijing. Environ. Sci. Technol. 2010, 44, 2490–2496. [Google Scholar]
- Begum, B.A.; Biswas, S.K.; Hopke, P.K. Assessment of trends and present ambient concentrations of PM2.2 and PM10 in Dhaka, Bangladesh. Air Qual. Atmos. Heal. 2008, 1, 125–133. [Google Scholar]
- Chaloulakou, A.; Kassomenos, P.; Spyrellis, N.; Demokritou, P.; Koutrakis, P. Measurements of PM10 and PM2.5 particle concentrations in Athens, Greece. Atmos. Environ. 2003, 37, 649–660. [Google Scholar]
- American Lung Association. State of the Air 2016; American Lung Association: Chicago, IL, USA, 2016. [Google Scholar]
- Toledo, V.E.; Almeida, P.B.; Quiterio, S.L.; Arbilla, G.; Moreira, A.; Escaleira, V.; Moreira, J.C. Evaluation of levels, sources and distribution of toxic elements in PM10 in a suburban industrial region, Rio de Janeiro, Brazil. Environ. Monit. Assess. 2008, 139, 49–59. [Google Scholar]
- Bogo, H.; Otero, M.; Castro, P.; Ozafrán, M.J.; Kreiner, A.; Calvo, E.J.; Negri, R.M. Study of atmospheric particulate matter in Buenos Aires city. Atmos. Environ. 2003, 37, 1135–1147. [Google Scholar]
- Wingfors, H.; Hägglund, L.; Magnusson, R. Characterization of the size-distribution of aerosols and particle-bound content of oxygenated PAHs, PAHs, and n-alkanes in urban environments in Afghanistan. Atmos. Environ. 2011, 45, 4360–4369. [Google Scholar]
- Magnusson, R.; Hägglund, L.; Wingfors, H. Broad exposure screening of air pollutants in the occupational environment of Swedish soldiers deployed in Afghanistan. Mil. Med. 2012, 177, 318–325. [Google Scholar]
- Hamad, H.S.; Schauer, J.J.; Heo, J.; Kadhim, A.K.H. Source apportionment of PM2.5 carbonaceous aerosol in Baghdad, Iraq. Atmos. Res. 2015, 156, 80–90. [Google Scholar]
- Baklanov, A.; Schlünzen, K.; Suppan, P.; Baldasano, J.; Brunner, D.; Aksoyoglu, S.; Carmichael, G.; Douros, J. Online coupled regional meteorology chemistry models in Europe: Current status and prospects. Atmos. Chem. Phys. 2014, 14, 317–398. [Google Scholar]
- Katayama, N.; Takeuchi, W. Comparison between Nighttime Light and Socioeconomic Indicators an International Scale Using VIIRS Day-Night Band. In Proceedings of the 35th Asian Conference on Remote Sensing, Nay Pyi Taw, Myanmar, 27–31 October 2014. [Google Scholar]
- Misra, P.; Takeuchi, W. Analysis of air quality and nighttime light for Indian urban regions. IOP Conf. Ser. Earth Environ. Sci. 2016, 37, 12077. [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| PM2.5 Range (g/m) | Count | Mean PM2.5 (g/m) | Mean R | Mean G | Mean B |
|---|---|---|---|---|---|
| 0–25 | 301 | 13.72 | 13.12 | 60.16 | 26.7 |
| 26–50 | 196 | 36.7 | 29.79 | 44.7 | 25.49 |
| 51–75 | 129 | 61.79 | 51.93 | 30.26 | 17.79 |
| 76–100 | 97 | 86.72 | 64.62 | 20.93 | 14.44 |
| 101–125 | 61 | 111.72 | 74.68 | 16.2 | 9.11 |
| 126–150 | 66 | 137.59 | 80.78 | 10.57 | 8.64 |
| 151–175 | 37 | 161.91 | 88.04 | 6.88 | 5.06 |
| 176–200 | 25 | 189.48 | 95.47 | 2.13 | 2.38 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Misra, P.; Fujikawa, A.; Takeuchi, W. Novel Decomposition Scheme for Characterizing Urban Air Quality with MODIS. Remote Sens. 2017, 9, 812. https://doi.org/10.3390/rs9080812
Misra P, Fujikawa A, Takeuchi W. Novel Decomposition Scheme for Characterizing Urban Air Quality with MODIS. Remote Sensing. 2017; 9(8):812. https://doi.org/10.3390/rs9080812
Chicago/Turabian StyleMisra, Prakhar, Aya Fujikawa, and Wataru Takeuchi. 2017. "Novel Decomposition Scheme for Characterizing Urban Air Quality with MODIS" Remote Sensing 9, no. 8: 812. https://doi.org/10.3390/rs9080812
APA StyleMisra, P., Fujikawa, A., & Takeuchi, W. (2017). Novel Decomposition Scheme for Characterizing Urban Air Quality with MODIS. Remote Sensing, 9(8), 812. https://doi.org/10.3390/rs9080812