Adaptive Estimation of Crop Water Stress in Nectarine and Peach Orchards Using High-Resolution Imagery from an Unmanned Aerial Vehicle (UAV)


 ,
,  , ,
, ,
Abstract
:
1. Introduction
2. Materials and Methods
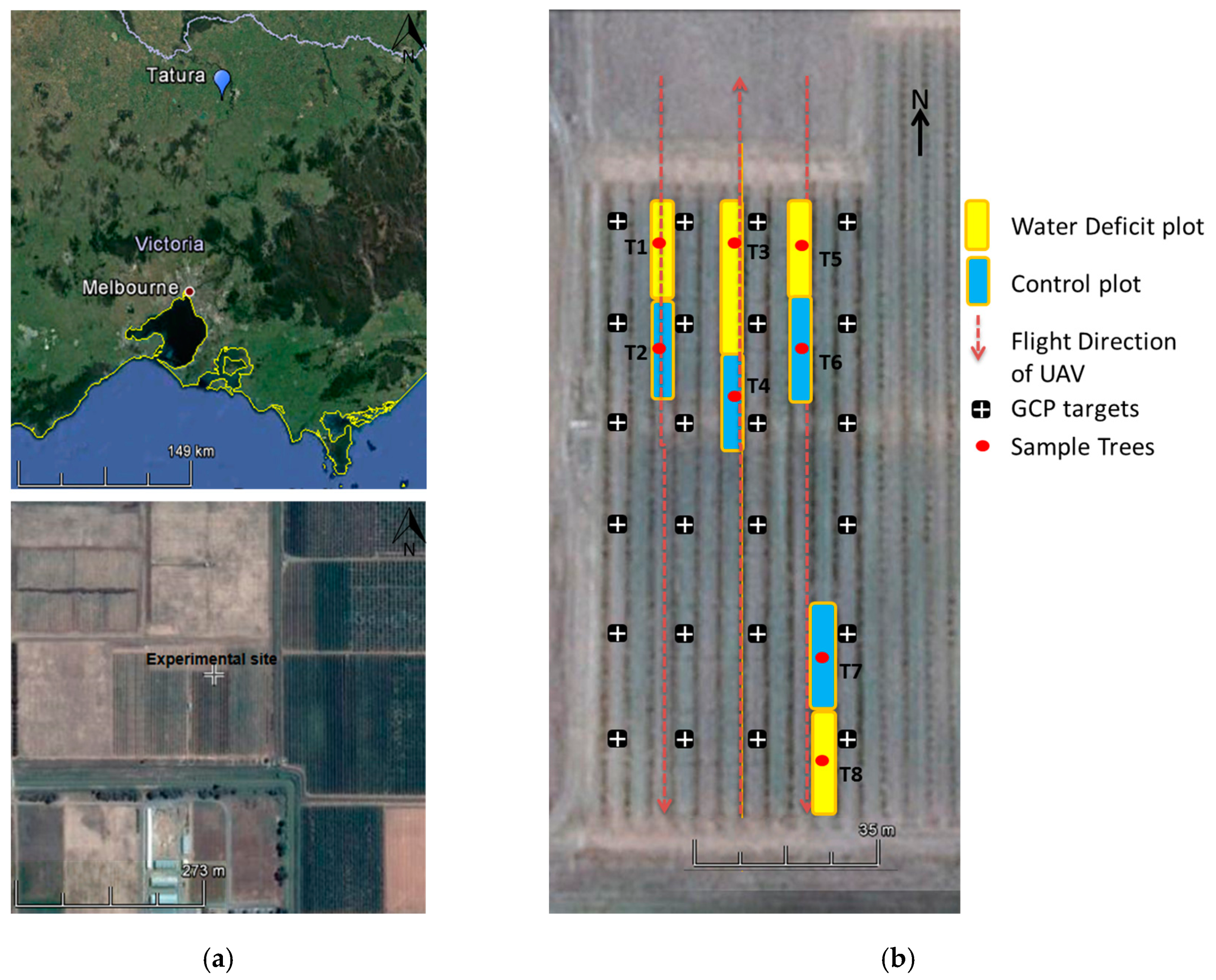
2.1. Study Site Description and Experimental Design
2.1.1. Site Description
2.1.2. Experiment Design
2.2. Aerial Thermal Infrared Imagery Acquisition
2.2.1. Aerial Images
2.2.2. Ground Targets
2.3. Physiological Data Acquisition
2.3.1. Leaf Temperature and Gas Exchange Measurements
2.3.2. Stem Water Potential Measurements
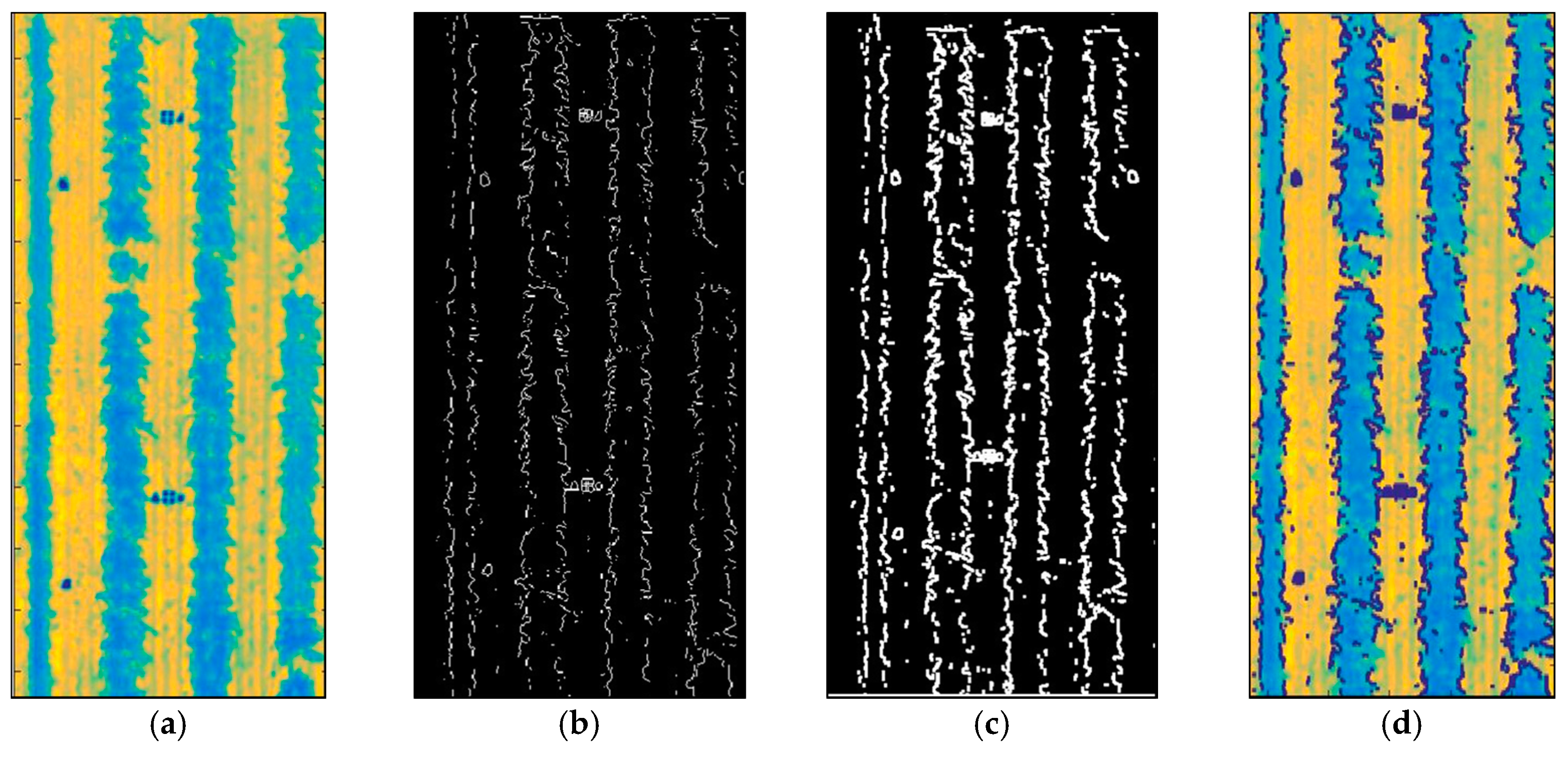
2.4. Aerial TIR Image Processing
2.5. Feature Extraction
2.6. Adaptive Crop Water Stress Index (CWSI)
2.6.1. CWSI Calculation
2.6.2. Adaptive and
3. Results
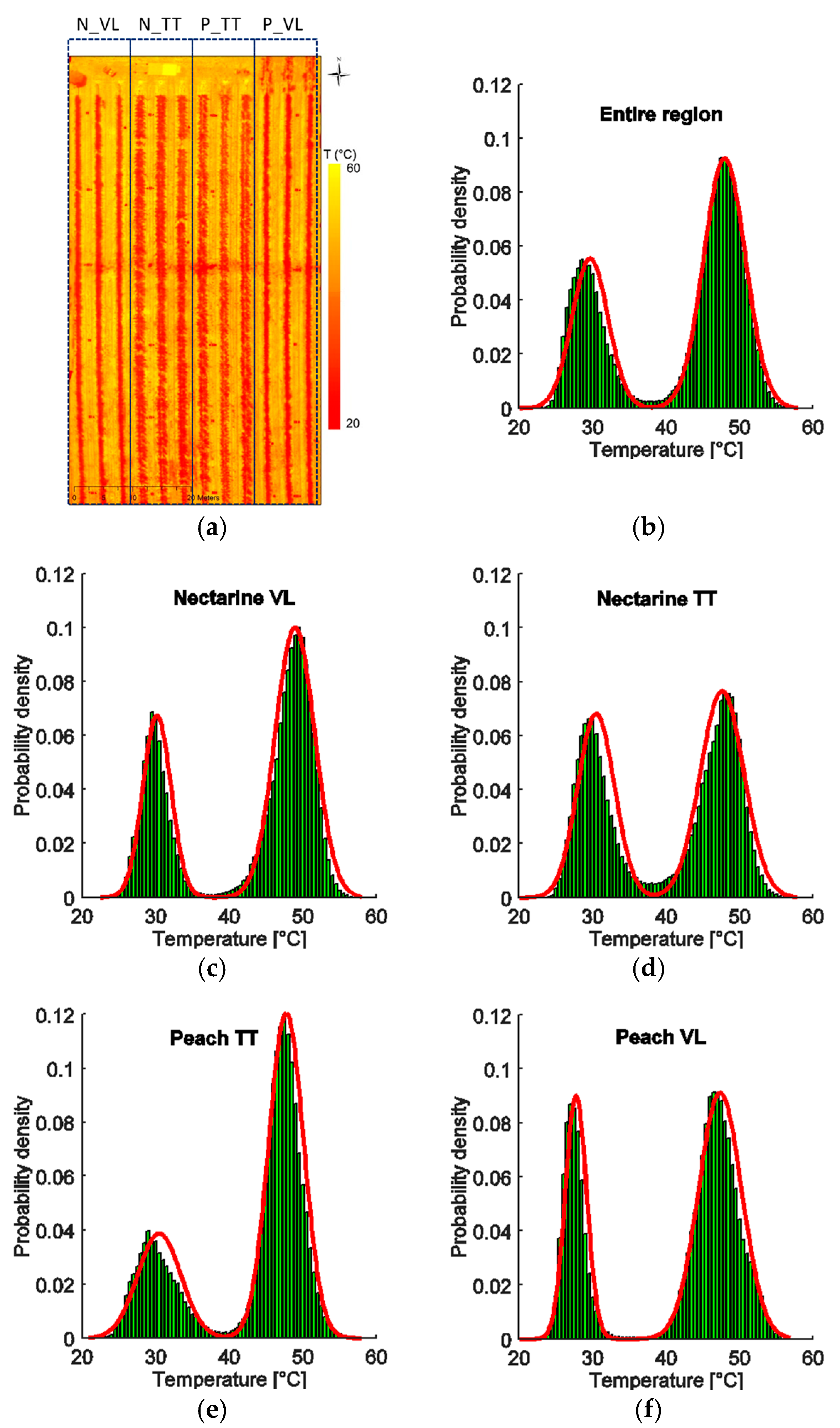
3.1. Canopy Temperatures from Sub-Regions
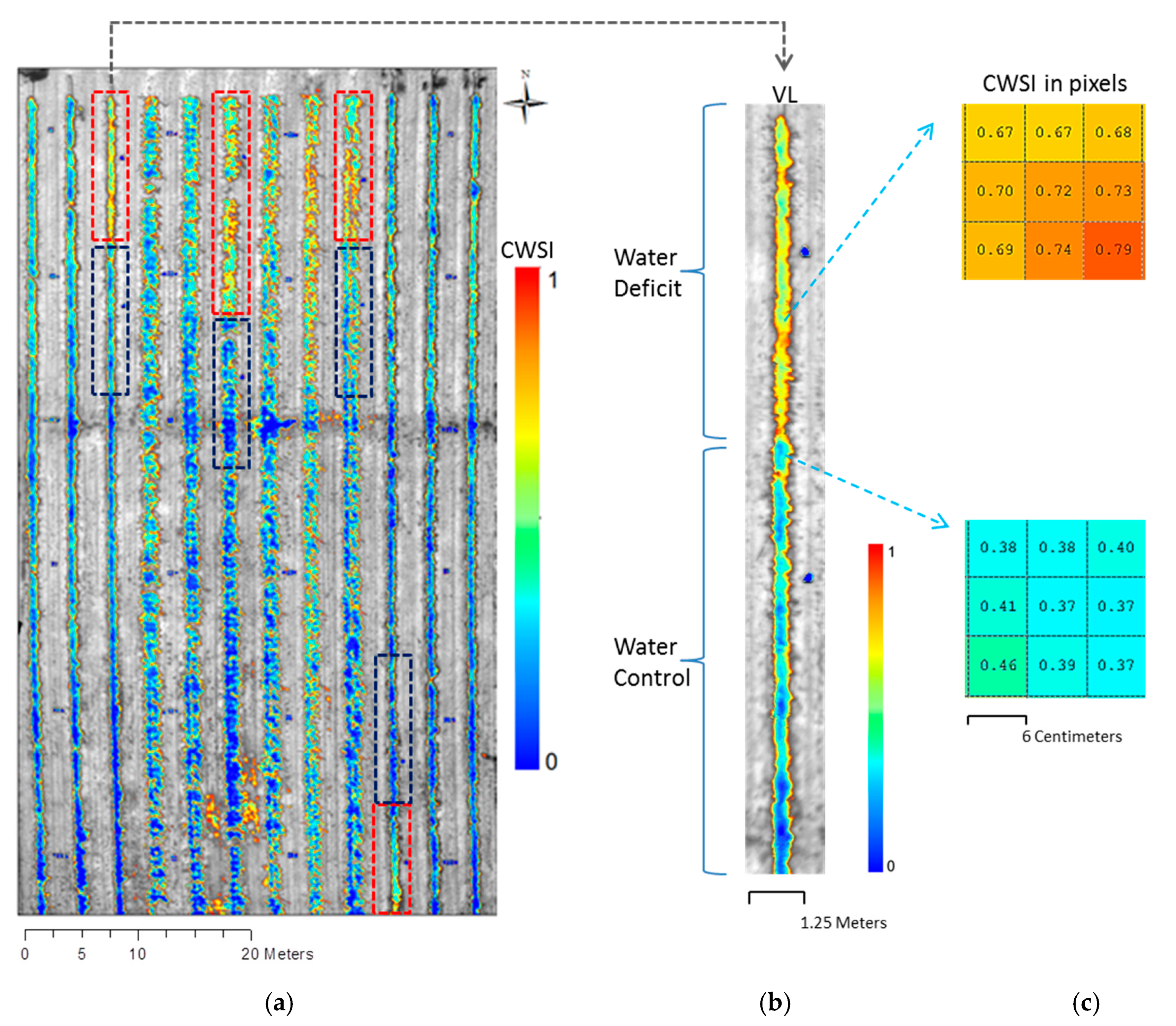
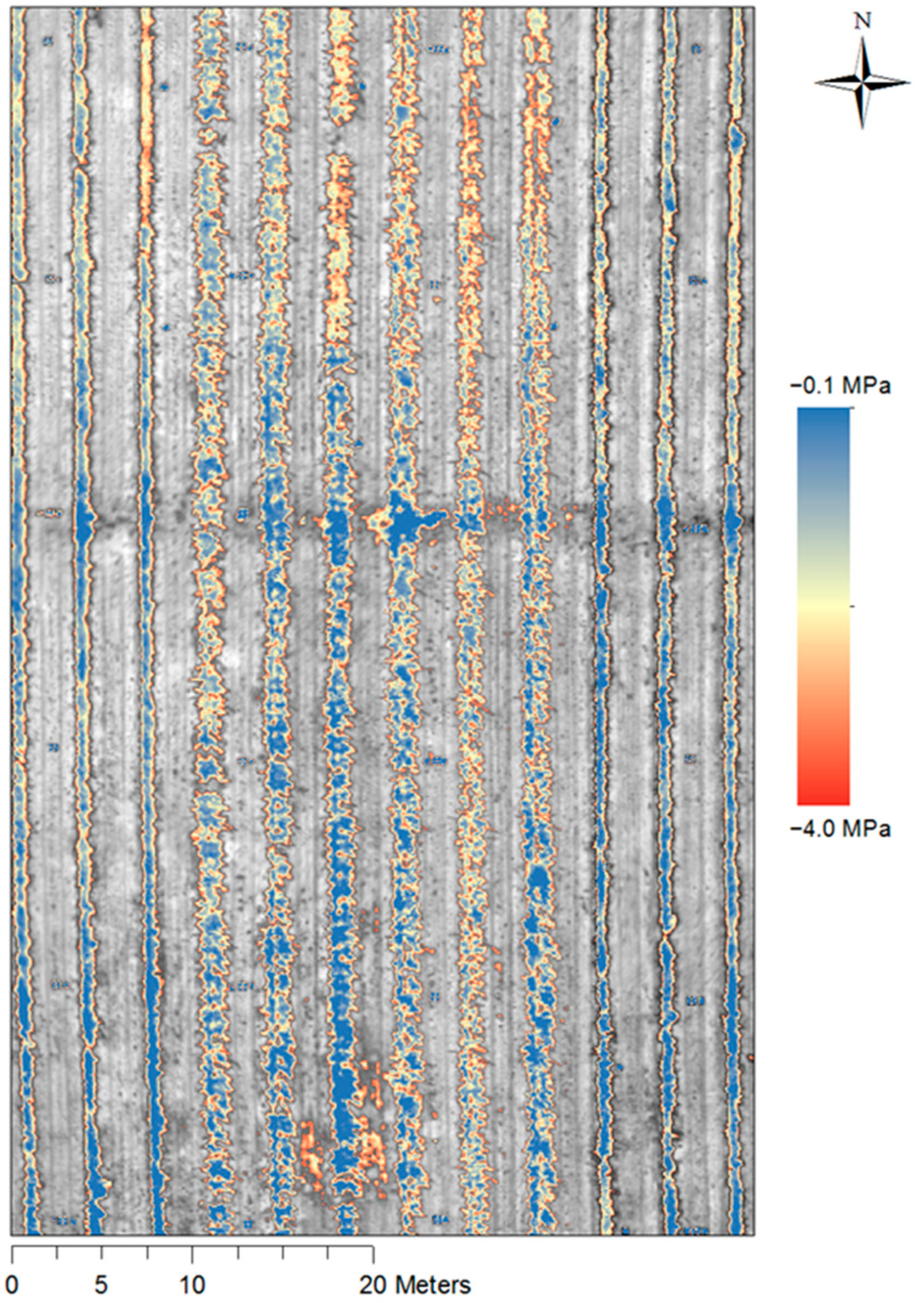
3.2. Mapping Adaptive CWSI
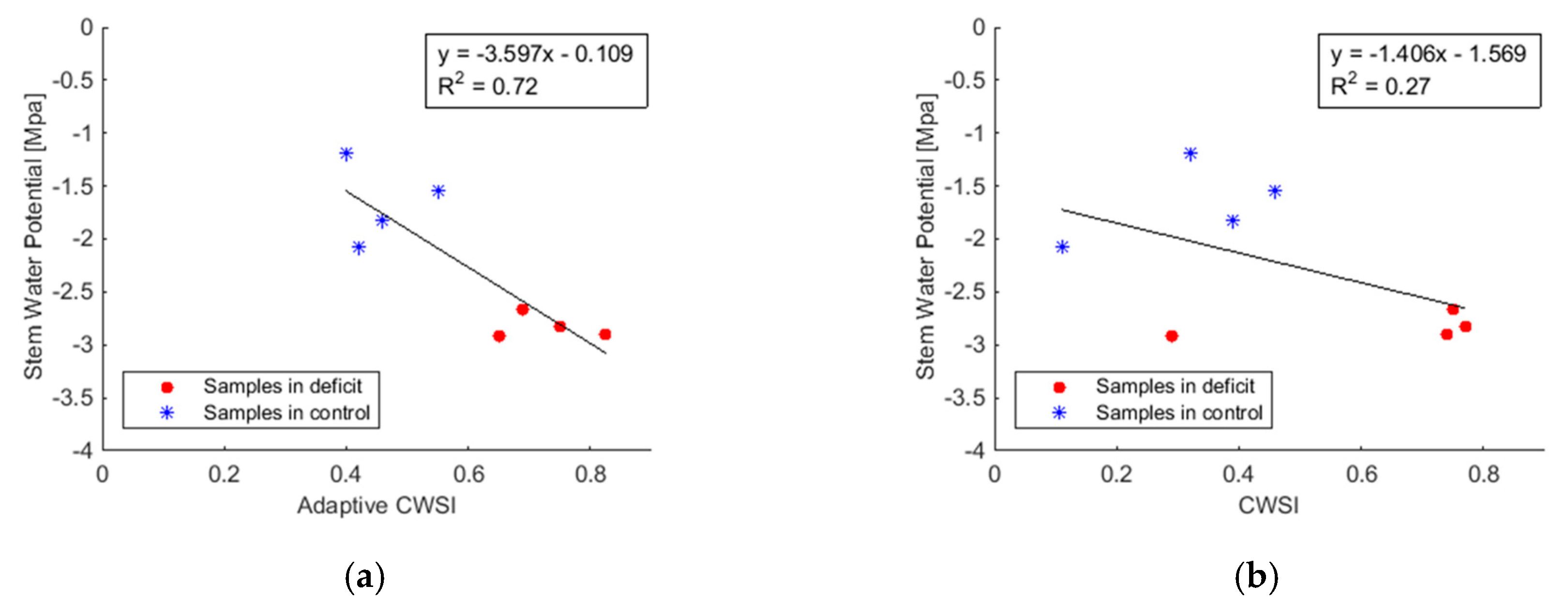
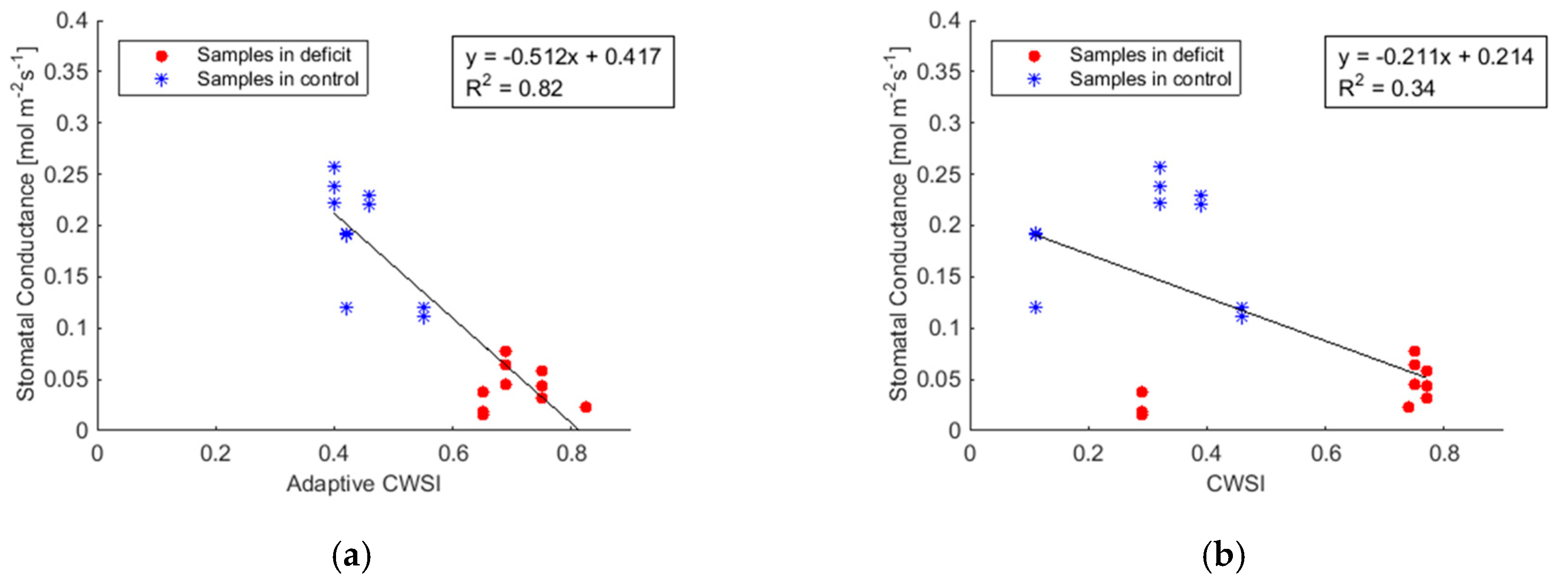
3.3. Validation of Adaptive CWSI
4. Discussion
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Glover, J.; Johnson, H.; Lizzio, J.; Wesley, V.; Hattersley, P.; Knight, C. Australia’s Crops and Pastures in a Changing Climate—Can Biotechnology Help? Australian Government Bureau of Rural Sciences: Canberra, Australia, 2008.
- Idso, S.B.; Jackson, R.D.; Pinter, J.P.J.; Reginato, R.J.; Hatfield, J.L. Normalizing the stress-degree-day parameter for environmental variability. Agric. Meteorol. 1981, 24, 45–55. [Google Scholar] [CrossRef]
- Jackson, R.D.; Idso, S.B.; Reginato, R.J.; Pinter, P.J., Jr. Canopy temperature as a crop water stress indicator wheat. Water Resour. Res. 1981, 17, 1133–1138. [Google Scholar] [CrossRef]
- Jones, H.G. Plants and Microclimate: A Quantitative Approach to Environmental Plant Physiology, 2nd ed.; Cambridge University Press: New York, NY, USA, 1992. [Google Scholar]
- Moran, M.S.; Clarke, T.R.; Inoue, Y.; Vidal, A. Estimating crop water deficit using the relation between surface-air temperature and spectral vegetation index. Remote Sens. Environ. 1994, 49, 246–263. [Google Scholar] [CrossRef]
- Leinonen, I.; Jones, H.G. Combining thermal and visible imagery for estimating canopy temperature and identifying plant stress. J. Exp. Bot. 2004, 55, 1423–1431. [Google Scholar] [CrossRef] [PubMed]
- Alchanatis, V.; Cohen, Y.; Cohen, S.; Moller, M.; Sprinstin, M.; Meron, M.; Tsipris, J.; Saranga, Y.; Sela, E. Evaluation of different approaches for estimating and mapping crop water status in cotton with thermal imaging. Precis. Agric. 2010, 11, 27–41. [Google Scholar] [CrossRef]
- Fuentes, S.; Bei, R.; Pech, J.; Tyerman, S. Computational water stress indices obtained from thermal image analysis of grapevine canopies. Irrig. Sci. 2012, 30, 523–536. [Google Scholar] [CrossRef]
- Berni, J.A.J.; Zarco-Tejada, P.J.; Sepulcre-Cantó, G.; Fereres, E.; Villalobos, F. Mapping canopy conductance and cwsi in olive orchards using high resolution thermal remote sensing imagery. Remote Sens. Environ. 2009, 113, 2380–2388. [Google Scholar] [CrossRef]
- Zarco-Tejada, P.J.; González-Dugo, V.; Berni, J.A.J. Fluorescence, temperature and narrow-band indices acquired from a uav platform for water stress detection using a micro-hyperspectral imager and a thermal camera. Remote Sens. Environ. 2012, 117, 322–337. [Google Scholar] [CrossRef]
- Bellvert, J.; Zarco-Tejada, P.; Girona, J.; Fereres, E. Mapping crop water stress index in a ‘pinot-noir’ vineyard: Comparing ground measurements with thermal remote sensing imagery from an unmanned aerial vehicle. Precis. Agric. 2014, 15, 361–376. [Google Scholar] [CrossRef]
- Acevedo-Opazo, C.; Tisseyre, B.; Taylor, J.A.; Ojeda, H.; Guillaume, S. A model for the spatial prediction of water status in vines (vitis vinifera L.) using high resolution ancillary information. Precis. Agric. 2010, 11, 358–378. [Google Scholar]
- Acevedo-Opazo, C.; Valdés-Gómez, H.; Taylor, J.A.; Avalo, A.; Verdugo-Vásquez, N.; Araya, M.; Jara-Rojas, F.; Tisseyre, B. Assessment of an empirical spatial prediction model of vine water status for irrigation management in a grapevine field. Agric. Water Manag. 2013, 124, 58–68. [Google Scholar] [CrossRef]
- Möller, M.; Alchanatis, V.; Cohen, Y.; Meron, M.; Tsipris, J.; Naor, A.; Ostrovsky, V.; Sprintsin, M.; Cohen, S. Use of thermal and visible imagery for estimating crop water status of irrigated grapevine. J. Exp. Bot. 2007, 58, 827–838. [Google Scholar] [CrossRef] [PubMed]
- Meron, M.; Tsipris, J.; Orlov, V.; Alchanatis, V.; Cohen, Y. Crop water stress mapping for site-specific irrigation by thermal imagery and artificial reference surfaces. Precis. Agric. 2010, 11, 148–162. [Google Scholar] [CrossRef]
- Rud, R.; Cohen, Y.; Alchanatis, V.; Levi, A.; Brikman, R.; Shenderey, C.; Heuer, B.; Markovitch, T.; Dar, Z.; Rosen, C.; et al. Crop water stress index derived from multi-year ground and aerial thermal images as an indicator of potato water status. Precis. Agric. 2014, 15, 273–289. [Google Scholar] [CrossRef]
- Meron, M.; Sprintsin, M.; Tsipris, J.; Alchanatis, V.; Cohen, Y. Foliage temperature extraction from thermal imagery for crop water stress determination. Precis. Agric. 2013, 14, 467–477. [Google Scholar] [CrossRef]
- Poblete-Echeverría, C.; Sepulveda-Reyes, D.; Ortega-Farias, S.; Zuñiga, M.; Fuentes, S. Plant water stress detection based on aerial and terrestrial infrared thermography: A study case from vineyard and olive orchard. In XXIX International Horticultural Congress on Horticulture: Sustaining Lives, Livelihoods and Landscapes (IHC2014): International Symposia on Water, Eco-Efficiency and Transformation of Organic Waste in Horticultural Production; Acta Horticulturae: Leuven, Belgium, 2016; pp. 141–146. [Google Scholar]
- Jones, H.G. Use of infrared thermometry for estimation of stomatal conductance as a possible aid to irrigation scheduling. Agric. Forest Meteorol. 1999, 95, 139–149. [Google Scholar] [CrossRef]
- Irmak, S.; Haman, D.Z.; Bastug, R. Determination of crop water stress index for irrigation timing and yield estimation of corn. Agron. J. 2000, 92, 1221–1227. [Google Scholar] [CrossRef]
- Cohen, Y.; Alchanatis, V.; Meron, M.; Saranga, Y.; Tsipris, J. Estimation of leaf water potential by thermal imagery and spatial analysis. J. Exp. Bot. 2005, 56, 1843–1852. [Google Scholar] [CrossRef] [PubMed]
- López-López, R.; Ramírez, R.A.; Sánchez-Cohen, I.; Bustamante, W.O.; González-Lauck, V. Evapotranspiration and crop water stress index in mexican husk tomatoes (physalis ixocarpa brot). In Evapotranspiration from Measurements to Agricultural and Environmental Applications; InTech: Jiutepec, México, 2011. [Google Scholar]
- Allen, R.G.; Pereira, L.S.; Raes, D.; Smith, M. Crop Evapotranspiration: Guidelines for Computing Crop Water Requirements (FAO Irrigation and Drainage Papers); Food and Agriculture Organization of the United Nations: Rome, Italy, 1998. [Google Scholar]
- FLIR Systems. User’s Manual Flir ax5 Series; T559770; FLIR Systems: Wilsonville, OR, USA, 2013. [Google Scholar]
- Raman, M.; Himanshu, A. Study and comparison of various image edge detection techniques. Int. J. Image Process. 2009, 3, 1–11. [Google Scholar]
- Scholander, P.F.; Hammel, H.T.; Bradstreet, E.D.; Hemmingsen, E.A. Sap pressure in vascular plants. Science 1965, 148, 339–346. [Google Scholar] [CrossRef] [PubMed]
- Choné, X.; van Leeuwen, C.; Dubourdieu, D.; Gaudillère, J.P. Stem water potential is a sensitive indicator of grapevine water status. Ann. Bot. 2001, 87, 477–483. [Google Scholar] [CrossRef]
- Naor, A. Irrigation scheduling of peach-deficit irrigation at different phenological stages and water stress assessment. In Proceedings of the VI International Peach Symposium, Santiago, Chile, 9–14 January 2005; pp. 339–350. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Plot | Crop Cultivar | Tree Training | Treatment |
|---|---|---|---|
| T1 | Nectarine 1 | Vertical Leader | Deficit |
| T2 | Vertical Leader | Control | |
| T3 | Tatura Trellis | Deficit | |
| T4 | Tatura Trellis | Control | |
| T5 | Peach 2 | Tatura Trellis | Deficit |
| T6 | Tatura Trellis | Control | |
| T7 | Vertical Leader | Control | |
| T8 | Vertical Leader | Deficit |
| Sub-Region | Crop Cultivar | Tree Training |
|---|---|---|
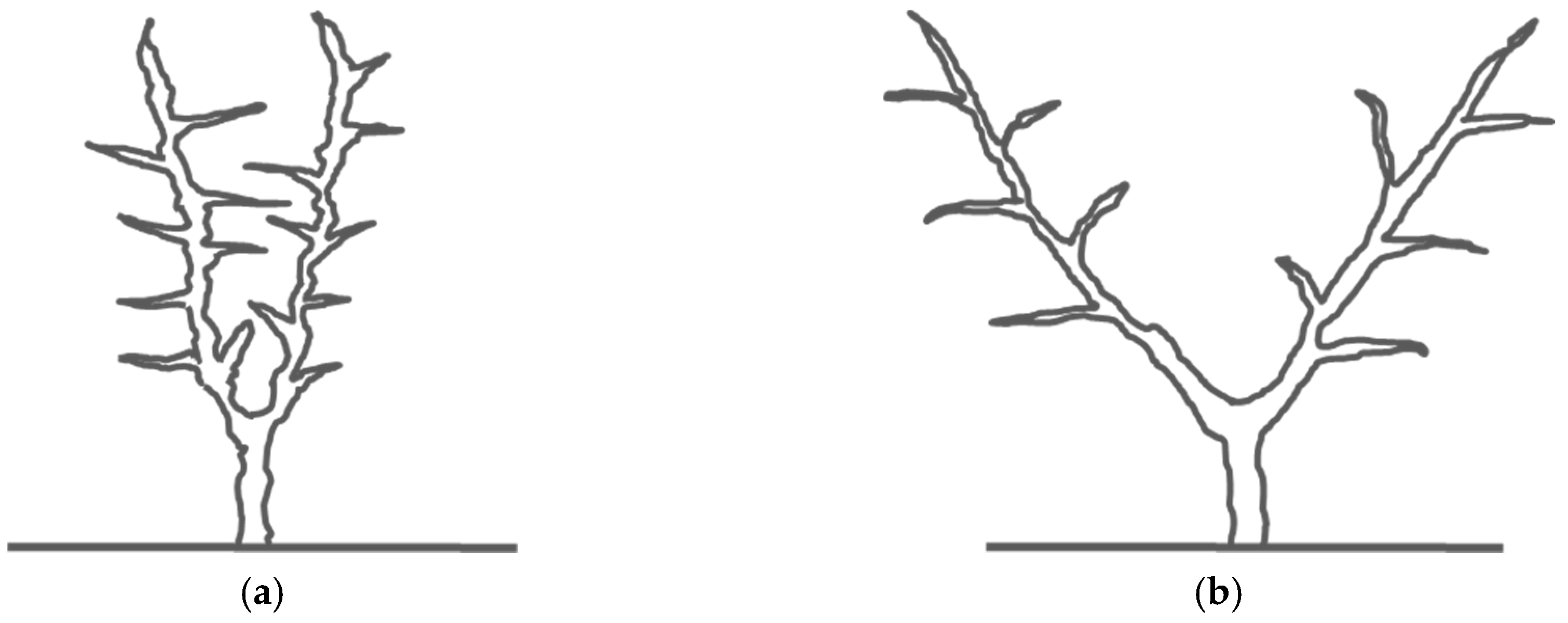
| 1. N_VL | Nectarine Autumn Bright (N) | Vertical Leader (VL) |
| 2. N_TT | Nectarine Autumn Bright (N) | Tatura Trellis (TT) |
| 3. P_TT | Peach August Flame (P) | Tatura Trellis (TT) |
| 4. P_VL | Peach August Flame (P) | Vertical Leader (VL) |
| Sub-Region | p 1 = 0.5 (°C) | Mean (°C) | SD 2 (°C) | 99% CI 3 (°C) | |
|---|---|---|---|---|---|
| Entire | 37.93 | 29.64 | 2.45 | 23.31 | 35.97 |
| 1_N_VL | 37.87 | 30.17 | 1.93 | 25.20 | 35.13 |
| 2_N_TT | 38.26 | 30.46 | 2.51 | 23.98 | 36.94 |
| 3_P_TT | 39.57 | 30.47 | 2.94 | 22.89 | 38.05 |
| 4_P_VL | 34.19 | 27.72 | 1.45 | 23.98 | 31.46 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Park, S.; Ryu, D.; Fuentes, S.; Chung, H.; Hernández-Montes, E.; O’Connell, M. Adaptive Estimation of Crop Water Stress in Nectarine and Peach Orchards Using High-Resolution Imagery from an Unmanned Aerial Vehicle (UAV). Remote Sens. 2017, 9, 828. https://doi.org/10.3390/rs9080828
Park S, Ryu D, Fuentes S, Chung H, Hernández-Montes E, O’Connell M. Adaptive Estimation of Crop Water Stress in Nectarine and Peach Orchards Using High-Resolution Imagery from an Unmanned Aerial Vehicle (UAV). Remote Sensing. 2017; 9(8):828. https://doi.org/10.3390/rs9080828
Chicago/Turabian StylePark, Suyoung, Dongryeol Ryu, Sigfredo Fuentes, Hoam Chung, Esther Hernández-Montes, and Mark O’Connell. 2017. "Adaptive Estimation of Crop Water Stress in Nectarine and Peach Orchards Using High-Resolution Imagery from an Unmanned Aerial Vehicle (UAV)" Remote Sensing 9, no. 8: 828. https://doi.org/10.3390/rs9080828
APA StylePark, S., Ryu, D., Fuentes, S., Chung, H., Hernández-Montes, E., & O’Connell, M. (2017). Adaptive Estimation of Crop Water Stress in Nectarine and Peach Orchards Using High-Resolution Imagery from an Unmanned Aerial Vehicle (UAV). Remote Sensing, 9(8), 828. https://doi.org/10.3390/rs9080828