A Review of Design and Fabrication of the Bionic Flapping Wing Micro Air Vehicles



Abstract
:1. Introduction
2. FWMAVs with Different Actuation Mechanisms
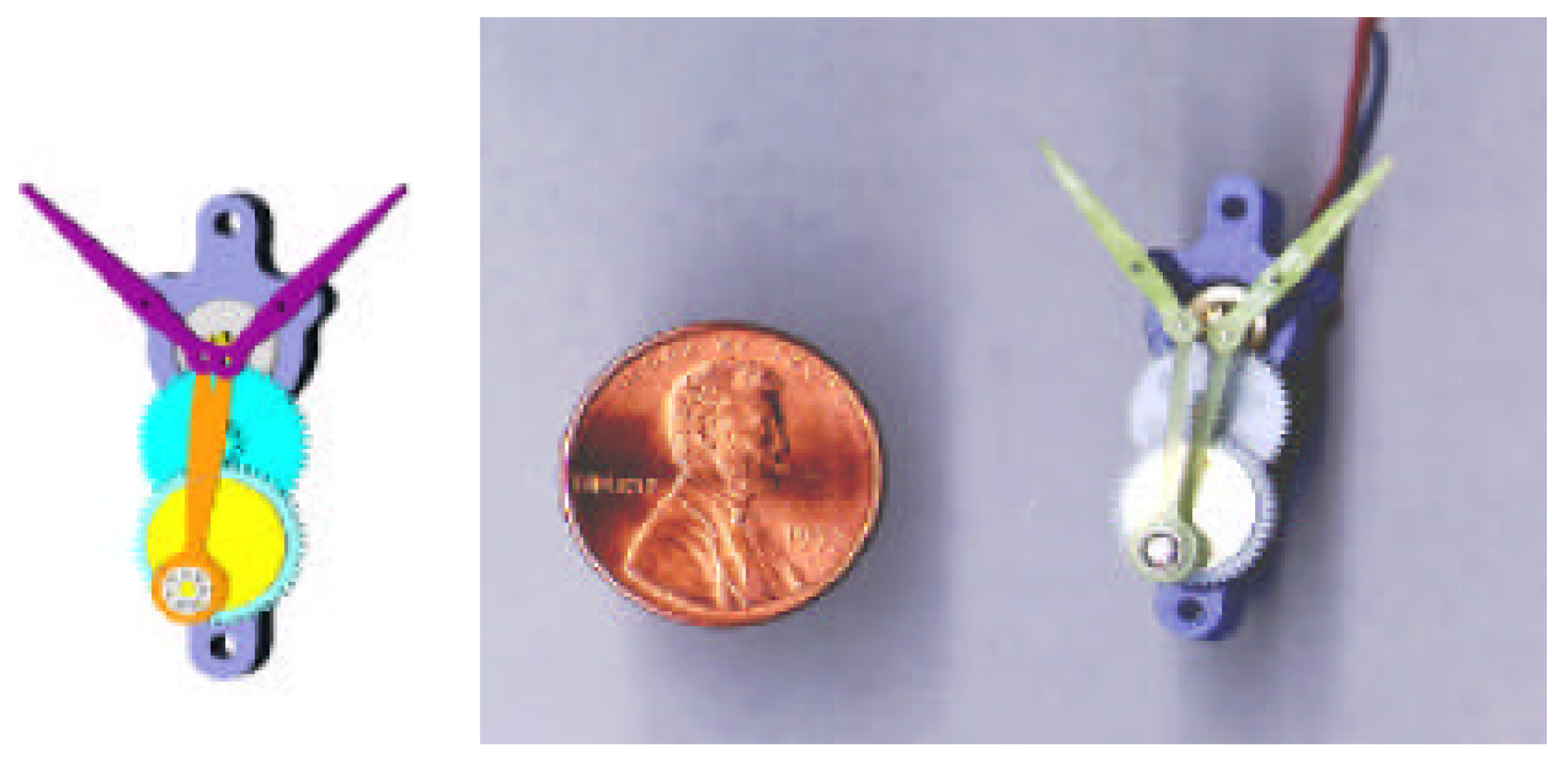
2.1. Electrical Motor-Driven Method
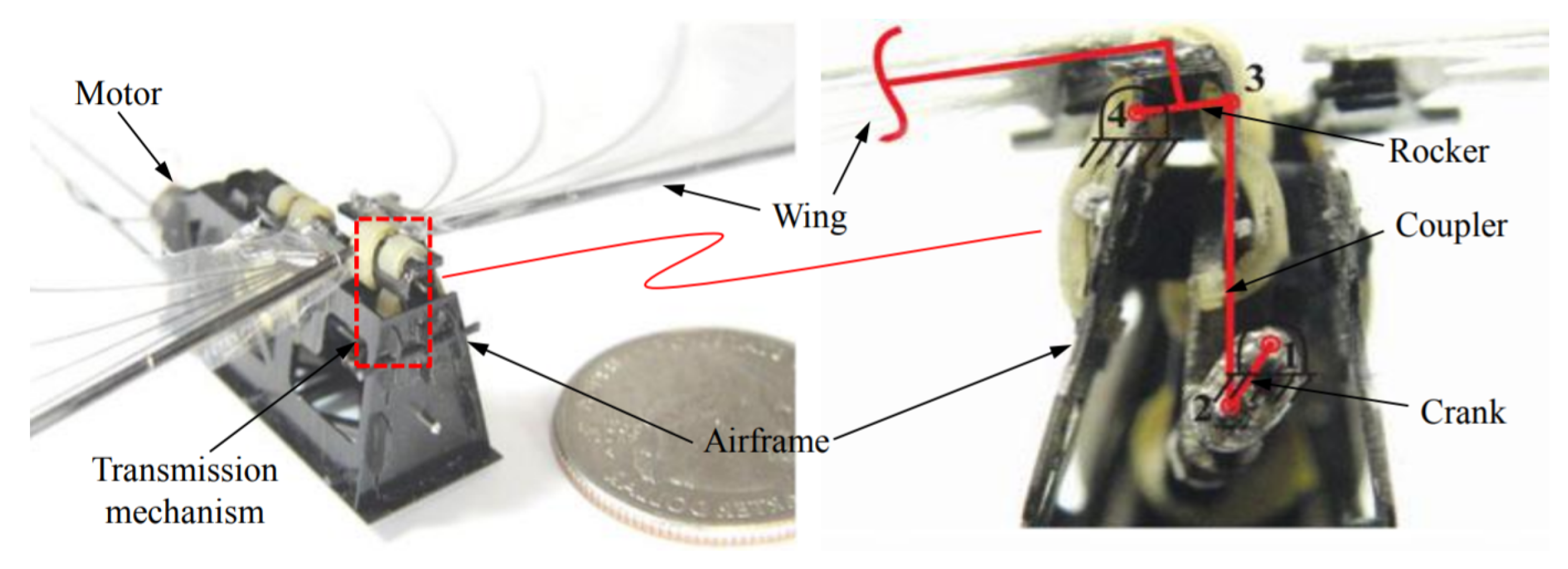
2.2. Mechanical Transmission-Driven Method
2.3. “Artificial Muscle” Material-Driven Method
3. Aerodynamic Mechanism Bases
- 1.
- Delayed stall mechanism. For an in-depth study on the aerodynamic mechanism of flapping wings of insects, see that conducted by biologists C. P. Ellington and C. van den Ber et al. on insect behavior [33]. They used scaled-up model of hawkmoth wings for experiments. The front edge of the hawkmoth wing was equipped with a smoke-releasing device and a high-speed camera to record the changing formation of the air flow of its wings during flapping. The study indicated that the large lift produced by the hawkmoth’s wings during flapping is due to the presence of delayed stalls. The angle of attack is much larger than the conventionally critical angle of attack, a difference that cannot be explained by classically aerodynamic principles. However, the experiment revealed that the formation of a vortex of circulating air flow at the leading edge is caused by the rapid movement of the wings. A low-pressure area will be generated because the vortex is located above the wings. Thus, generating a large lift force is beneficial. The observed phenomenon is consistent with the basic theoretical calculation, which is in line with the study of Liu H. [34].
- 2.
- Rotational circulation mechanism. Dickinson M. H. et al. completed the experiment using a mechanical device to obtain the equations of the wings’ flapping motion captured by the camera [36,37,38]. They simulated the movement of insect wings by driving the model wings placed in the cylinder and utilized a sensor to measure the lift and drag acting on the airfoil. As a result, they found that the translational force generated by the wing attack was not sufficient, whereas they discovered rotational circulation mechanism generated more lift, usually two to three times the chord length. The theory of rotational circulation mechanism is that the wing of the fruit fly generates a reverse vortex when the wings are flapping forward at the end. So the airflow velocity above the fly is faster than at the bottom, forming a pressure difference and producing enough lift.
- 3.
- Added mass effect mechanism. This is known to play a substantial role in defining the hydrodynamic forces acting on moving bodies because the movement of the surrounding fluid requires an additional force over and above what is necessary to accelerate the body itself [39]. Moreover, the mechanism was later devoted mostly to fast oscillating motions in view of flutter and stability studies. Andro J. Y. and Jacqin L. recently analyzed the added mass effect on a harmonically heaving airfoil by using 2-D direct numerical simulations [40]. Basing on previous studies, Giesing J. P. developed an unsteady panel method for calculating the forces acting on an airfoil executing arbitrary motions and calculated the added mass coefficients [41]. A fairly good agreement was found between the numerical and analytical values of the coefficients. Although many researchers made some achievements, the theoretical model to explain a variety of complex parameters still requires further improvement.
4. Transmission Mechanism Policies
- 1.
- Piezoelectric actuators: Piezoelectric actuators are devices that use inverse piezoelectric effects [44] (Figure 8). The drive voltage of a piezoelectric actuator is typically in the range of a few tens to several hundreds of volts. The operating voltage of piezoceramic stack actuators is realized by stacking monolithic multilayer elements in the range of 60–200 V and a higher required voltage of approximately 1000 V for discrete stack actuators. When in conjunction with a mechanical transmission, the actuator is capable of enhanced stroke amplitude and reciprocating motion for flapping flight [45,46]. In addition, piezoelectric actuators have high displacement, fast response [47,48] and high efficiency at high deformation frequency [49]. Therefore, piezoelectric materials are an optimal choice for use as an actuator in FWMAVs.
- 2.
- Dielectric elastomers: DEA is polymer material with flexible electrodes that have a large electromechanical response to the applied electric field (Figure 9) [53,54]. DEA typically operates at very high voltages (about 1–10 kV) with an electric field of approximately 100 MV/m and produces large strain at high working density [55,56]. In reference [57], DEA was used to drive approximately 15 g of FWMAV that extends the limitation of the artificial muscle to the level of energy required for a heavyweight aerial vehicle. However, the application is limited by the challenge of a high electric field requirement in the development of DEA.
- 3.
- Electrostatic elastomer: Electrostatic and piezoelectric actuators both offer efficient compliant actuation and are capable of providing high working densities [48]. Piezoelectric bimorph actuators have been successfully implemented for centimeter-scale robots [47] but the performance of thin film required by millimeter-scale robots deteriorates [58]. To make up for this disadvantage, electrostatic actuators are generally fabricated in chip level with Microelectromechanical Systems (MEMS) technique, which provide an excellent choice for mobile microrobots (Figure 10) [59].
- 4.
- Electromagnetic actuators: Electromagnetic actuators convert electrical energy to mechanical energy and vice versa by using electromagnetic mechanical principles. Electromagnetic actuators exhibit good performance owing to their quick response, simple structure, easy control and low voltage requirement from 0 to 24 V [60,61]. Electromagnetic actuators mainly consist of an electromagnetic coil, a permanent magnet rotor and a “virtual spring” magnet pair. Deng et al. [62] recently used a 2.6 g electromagnetic actuator to drive a FWMAV with wing-beat frequency, as shown in Figure 11.
5. Power Electronic Interfaces
5.1. Power Electronic Interfaces for Current-Mode Actuators
5.2. Power Electronic Interfaces for Voltage-Mode Actuators
5.3. Drive Stage
5.4. Control of Proposed Power Electronic Interfaces
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Whitney, J.P.; Wood, R.J. Aeromechanics of passive rotation in flapping flight. J. Fluid Mech. 2010, 660, 197–220. [Google Scholar] [CrossRef]
- Li, L.; Wu, Z. Research on automatic navigation of unmanned aerial vehicle based on 3D laser scanning. Laser J. 2018, 39, 91–95. [Google Scholar]
- Wood, R.J.; Steltz, E.; Fearing, R.S. Optimal energy density piezoelectric bending actuators. Sens. Actuators A Phys. 2005, 119, 476–488. [Google Scholar] [CrossRef]
- Karpelson, M.; Wei, G.; Wood, R.J. Milligram-scale high-voltage power electronics for piezoelectric microrobots. In Proceedings of the IEEE International Conference on Robotics and Automation, Kobe, Japan, 12–17 May 2009; pp. 2217–2224. [Google Scholar]
- Pornsin-Sirirak, T.N.; Tai, Y.C.; Ho, C.M.; Keennon, M. Microbat: A palm-sized electrically powered ornithopter. In Proceedings of the NASA/JPL Workshop on Biomorphic Robotics, Simi Valley, CA, USA, 14–16 August 2001; pp. 14–17. [Google Scholar]
- Keennon, M.; Klingebiel, K.; Won, H. Development of the nano hummingbird: A tailless flapping wing micro air vehicle. In Proceedings of the 50th AIAA Aerospace Sciences Meeting Including the New Horizons Forum and Aerospace Exposition, Nashville, TN, USA, 9–12 January 2012; pp. 8634–8657. [Google Scholar]
- Li, X. Laser Power Beaming for UAVs. Laser J. 2013, 34, 18–19. [Google Scholar]
- Rose, C.; Fearing, R.S. Comparison of ornithopter wind tunnel force measurements with free flight. In Proceedings of the IEEE International Conference on Robotics and Automation, Hong Kong, China, 31 May–7 June 2014; pp. 1816–1821. [Google Scholar]
- Krashanitsa, R.Y.; Silin, D.; Shkarayev, S.V.; Abate, G. Flight dynamics of a flapping-wing air vehicle. Int. J. Micro Air Veh. 2009, 1, 35–49. [Google Scholar] [CrossRef]
- Liu, F.; Lin, J.; Wang, Y.; Chen, C. The design of High Precision QCL Driver for Micro Laser Impulsed Unmanned Aerial Vehicle. Laser J. 2014, 35, 75–77. [Google Scholar]
- Gerdes, J.; Holness, A.; Perez-Rosado, A.; Roberts, L.; Greisinger, A.; Barnett, E.; Kempny, J.; Lingam, D.; Yeh, C.H.; Bruck, H.A.; et al. Robo Raven: A flapping-wing air vehicle with highly compliant and independently controlled wings. Soft Robot. 2014, 1, 275–288. [Google Scholar] [CrossRef]
- Mackenzie, D. A flapping of wings. Science 2012, 335, 1430–1433. [Google Scholar] [CrossRef] [PubMed]
- Tijmons, S.; De Wagter, C.; Remes, B.; de Croon, G. Autonomous Door and Corridor Traversal with a 20-Gram Flapping Wing MAV by Onboard Stereo Vision. Aerospace 2018, 5, 69. [Google Scholar] [CrossRef]
- De Croon, G.C.; Groen, M.A.; De Wagter, C.; Remes, B.; Ruijsink, R.; Van Oudheusden, B.W. Design, aerodynamics and autonomy of the DelFly. Bioinspir. Biomim. 2012, 7, 025003. [Google Scholar] [CrossRef] [PubMed]
- Karásek, M.; Muijres, F.T.; De Wagter, C.; Remes, B.D.; de Croon, G.C. A tailless aerial robotic flapper reveals that flies use torque coupling in rapid banked turns. Science 2018, 361, 1089–1094. [Google Scholar] [CrossRef] [PubMed]
- De Croon, G.C.H.E.; Perçin, M.; Remes, B.D.W.; Ruijsink, R.; De Wagter, C. The DelFly: Design, Aerodynamics, and Artificial Intelligence of a Flapping Wing Robot; Springer: Cham, Switzerland, 2016. [Google Scholar]
- Phan, H.V.; Truong, Q.T.; Park, H.C. Implementation of initial passive stability in insect-mimicking flapping-wing micro air vehicle. Int. J. Intell. Unmanned Syst. 2015, 3, 18–38. [Google Scholar] [CrossRef]
- Ramezani, A.; Chung, S.J.; Hutchinson, S. A biomimetic robotic platform to study flight specializations of bats. Sci. Robot. 2017, 2, eaal2505. [Google Scholar] [CrossRef]
- Roshanbin, A.; Altartouri, H.; Karásek, M.; Preumont, A. COLIBRI: A hovering flapping twin-wing robot. Int. J. Micro Air Veh. 2017, 9, 270–282. [Google Scholar] [CrossRef]
- Hsiao, F.Y.; Yang, L.J.; Lin, S.H.; Chen, C.L.; Shen, J.F. Autopilots for ultra lightweight robotic birds: Automatic altitude control and system integration of a sub-10 g weight flapping-wing micro air vehicle. IEEE Control Syst. 2012, 32, 35–48. [Google Scholar]
- Hamilton, S.L. UAVs: Unmanned Aerial Vehicles; ABDO Publishing Company: Mankato, MN, USA, 2012. [Google Scholar]
- Tanaka, H.; Shimoyama, I. Forward flight of swallowtail butterfly with simple flapping motion. Bioinspir. Biomim. 2010, 5, 026003. [Google Scholar] [CrossRef]
- Sahai, R.; Galloway, K.C.; Wood, R.J. Elastic element integration for improved flapping-wing micro air vehicle performance. IEEE Trans. Robot. 2013, 29, 32–41. [Google Scholar] [CrossRef]
- Hines, L.; Campolo, D.; Sitti, M. Liftoff of a motor-driven, flapping-wing microaerial vehicle capable of resonance. IEEE Trans. Robot. 2014, 30, 220–232. [Google Scholar] [CrossRef]
- Yuk, H.; Shin, J.H.; Jo, S. Design and control of thermal SMA based small crawling robot mimicking C. elegans. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, Taipei, Taiwan, 18–22 October 2010; pp. 407–412. [Google Scholar]
- Gilpin, K.; Torres-Jara, E.; Rus, D. Controlling Closed-Chain Robots with Compliant SMA Actuators: Algorithms and Experiments; Experimental Robotics; Springer: Heidelberg/Berlin, Germany, 2007. [Google Scholar]
- Chen, C.; Tang, Y.; Khaligh, A.; Newcomb, R.W. A Low-power and High-gain Converter for Driving Dielectric Elastomer Actuators. In Proceedings of the Twenty-Eighth Annual IEEE Applied Power Electronics Conference and Exposition, Long Beach, CA, USA, 17–21 March 2013; pp. 2755–2760. [Google Scholar]
- Jung, K.; Koo, J.C.; Lee, Y.K.; Choi, H.R. Artificial annelid robot driven by soft actuators. Bioinspir. Biomim. 2007, 2, S42. [Google Scholar] [CrossRef]
- Steltz, E.; Avadhanula, S.; Fearing, R.S. High Lift Force with 275 Hz Wing Beat in MFI. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, Berkeley, CA, USA, 29 October–2 November 2007; pp. 3987–3992. [Google Scholar]
- Jayaram, K.; Jafferis, N.; Doshi, N.; Goldberg, B.; Wood, R.J. Concomitant Sensing and Actuation for Piezoelectric Microrobots. Smart Mater. 2018, 27, 065028. [Google Scholar] [CrossRef]
- Wood, R.J. Liftoff of a 60mg flapping-wing MAV. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, Berkeley, CA, USA, 29 October–2 November 2007; pp. 1889–1894. [Google Scholar]
- Ma, K.Y.; Chirarattananon, P.; Fuller, S.B.; Wood, R.J. Controlled flight of a biologically inspired, insect-scale robot. Science 2013, 340, 603–607. [Google Scholar] [CrossRef] [PubMed]
- Van den Berg, C.; Ellington, C.P. The vortex wake of a ‘hovering’model hawkmoth. Philos. Trans. R. Soc. B Biol. Sci. 1997, 352, 317–328. [Google Scholar] [CrossRef]
- Liu, H.; Ellington, C.P.; Kawachi, K.; Van Den Berg, C.; Willmott, A.P. A computational fluid dynamic study of hawkmoth hovering. J. Exp. Biol. 1998, 201, 461–477. [Google Scholar] [PubMed]
- Weis-Fogh, T. Unusual mechanisms for the generation of lift in flying animals. Sci. Am. 1975, 233, 80–87. [Google Scholar] [CrossRef]
- Dickinson, M. The effects of wing rotation on unsteady aerodynamic performance at low Reynolds numbers. J. Exp. Biol. 1994, 192, 179–206. [Google Scholar] [PubMed]
- Dickinson, M.H.; Gotz, K.G. Unsteady aerodynamic performance of model wings at low Reynolds numbers. J. Exp. Biol. 1993, 174, 45–64. [Google Scholar]
- Dickinson, M.H.; Lehmann, F.O.; Sane, S.P. Wing rotation and the aerodynamic basis of insect flight. Science 1999, 284, 1954–1960. [Google Scholar] [CrossRef] [PubMed]
- Gardano, P.; Dabnichki, P. Application of boundary element method to modelling of added mass and its effect on hydrodynamic forces. CMES Comput. Model. Eng. Sci. 2006, 15, 87–98. [Google Scholar]
- Andro, J.Y.; Jacquin, L. Frequency effects on the aerodynamic mechanisms of a heaving airfoil in a forward flight configuration. Aerosp. Sci. Technol. 2009, 13, 71–80. [Google Scholar] [CrossRef]
- Giesing, J.P. Nonlinear two-dimensional unsteady potential flow with lift. J. Aircr. 1968, 5, 135–143. [Google Scholar] [CrossRef]
- Carpi, F.; Roy, K.; Peter, S.; Gursel, A. Electroactive polymer actuators as artificial muscles: Are they ready for bioinspired applications? Bioinspir. Biomim. 2011, 6, 045006. [Google Scholar] [CrossRef]
- Kornbluh, R.D.; Pelrine, R.; Pei, Q.; Heydt, R.; Stanford, S.; Oh, S.; Eckerle, J. Electroelastomers: Applications of dielectric elastomer transducers for actuation, generation, and smart structures. In Proceedings of the SPIE’s 9th Annual International Symposium on Smart Structures and Materials, San Diego, CA, USA, 9 July 2002; pp. 254–271. [Google Scholar]
- Yoichi, M. Applications of piezoelectric actuator. NEC Tech. J. 2006, 1, 82–86. [Google Scholar]
- Karpelson, M.; Wei, G.Y.; Wood, R.J. Driving high voltage piezoelectric actuators in microrobotic applications. Sens. Actuators A Phys. 2012, 176, 78–89. [Google Scholar] [CrossRef]
- Roll, J.A.; Cheng, B.; Deng, X. An electromagnetic actuator for high-frequency flapping-wing microair vehicles. IEEE Trans. Robot. 2015, 31, 400–414. [Google Scholar] [CrossRef]
- Pang, G.; Deng, J.; Wang, F.; Zhang, J.; Pang, Z.; Yang, G. Development of Flexible Robot Skin for Safe and Natural Human–Robot Collaboration. Micromachines 2018, 9, 576. [Google Scholar] [CrossRef]
- Wood, R.J. The first takeoff of a biologically inspired at-scale robotic insect. IEEE Trans. Robot. 2008, 24, 341–347. [Google Scholar] [CrossRef]
- Feng, L.; Zhou, Q.; Song, B.; Feng, Y.; Cai, J.; Jiang, Y.; Zhang, D. Cell Injection Millirobot Development and Evaluation in Microfluidic Chip. Micromachines 2018, 9, 590. [Google Scholar] [CrossRef]
- Sreetharan, P.S.; Wood, R.J. Passive torque regulation in an underactuated flapping wing robotic insect. Auton. Robot. 2011, 31, 225. [Google Scholar] [CrossRef]
- Pérez-Arancibia, N.O.; Ma, K.Y.; Galloway, K.C.; Greenberg, J.D.; Wood, R.J. First controlled vertical flight of a biologically inspired microrobot. Bioinspir. Biomim. 2011, 6, 036009. [Google Scholar] [CrossRef]
- Lok, M.; Brooks, D.; Wood, R.; Wei, G.Y. Design and analysis of an integrated driver for piezoelectric actuators. In Proceedings of the IEEE Energy Conversion Congress and Exposition, Denver, CO, USA, 15–19 September 2013; pp. 2684–2691. [Google Scholar]
- Lok, M.; Zhang, X.; Helbling, E.F.; Wood, R.; Brooks, D.; Wei, G.Y. A power electronics unit to drive piezoelectric actuators for flying microrobots. In Proceedings of the IEEE Custom Integrated Circuits Conference, San Jose, CA, USA, 28–30 September 2015; pp. 1–4. [Google Scholar]
- Li, Q.; Hao, X.; He, J.; Li, X.; Wang, J.; Li, H. The Influences of Refractive Index Sensing of Metamaterials with Different Size of Dielectric Layer. Laser J. 2016, 37, 14–17. [Google Scholar]
- Madden, J.D.; Vandesteeg, N.A.; Anquetil, P.A.; Madden, P.G.; Takshi, A.; Pytel, R.Z.; Hunter, I.W. Artificial muscle technology: Physical principles and naval prospects. IEEE J. Ocean. Eng. 2004, 29, 706–728. [Google Scholar] [CrossRef]
- Shintake, J.; Rosset, S.; Schubert, B.; Mintchev, S.; Floreano, D.; Shea, H. DEA for soft robotics: 1-gram actuator picks up a 60-gram egg. In Proceedings of the SPIE’s Smart Structures and Materials + Nondestructive Evaluation and Health Monitoring, San Diego, CA, USA, 1 April 2015; p. 94301S. [Google Scholar]
- Nicholas, S.; Baker, M.H.; Daniel, S.; Ryan, D. Design of a Flapping Wing Micro Air Vehicle Actuation System. In Proceedings of the 2012 ASEE North-Central Section Conference, Ada, OH, USA, 24 March 2012; pp. 23–24. [Google Scholar]
- Bronson, J.R.; Pulskamp, J.S.; Polcawich, R.G.; Kroninger, C.M.; Wetzel, E.D. PZT MEMS actuated flapping wings for insect-inspired robotics. In Proceedings of the IEEE 22nd International Conference on Micro Electro Mechanical Systems, Sorrento, Italy, 25–29 January 2009; pp. 1047–1050. [Google Scholar]
- Tang, Y.; Chen, C.; Khaligh, A.; Penskiy, I.; Bergbreiter, S. An ultracompact dual-stage converter for driving electrostatic actuators in mobile microrobots. IEEE Trans. Power Electron. 2014, 29, 2991–3000. [Google Scholar] [CrossRef]
- Meng, K.; Zhang, W.; Chen, W.; Li, H.; Chi, P.; Zou, C.; Chen, J. The design and micromachining of an electromagnetic MEMS flapping-wing micro air vehicle. Microsyst. Technol. 2012, 18, 127–136. [Google Scholar] [CrossRef]
- Roll, J.A.; Cheng, B.; Deng, X. Design, fabrication, and experiments of an electromagnetic actuator for flapping wing micro air vehicles. In Proceedings of the IEEE International Conference on Robotics and Automation, Karlsruhe, Germany, 6–10 May 2013; pp. 809–815. [Google Scholar]
- Cheng, B.; Roll, J.A.; Deng, X. Modeling and optimization of an electromagnetic actuator for flapping wing micro air vehicle. In Proceedings of the IEEE International Conference on Robotics and Automation, Karlsruhe, Germany, 6–10 May 2013; pp. 4035–4041. [Google Scholar]
- Schneuwly, A. Charge ahead. Power Eng. 2005, 19, 34–37. [Google Scholar] [CrossRef]
- Bellew, C.L.; Hollar, S.; Pister, K.S.J. An SOI Process for Fabrication of Solar Cells, Transistors, and Electrostatic Actuators. In Proceedings of the 12th International Conference on Solid State Sensors, Actuators and Microsystems, Wilmington, MA, USA, 8–12 June 2003; pp. 1075–1079. [Google Scholar]
- Wilhelm, A.; Surgenor, B.W.; Pharoah, J.G. Evaluation of a Micro Fuel Cell as Applied to a Mobile Robot. In Proceedings of the IEEE International Confernce on Mecharonics and Automation, London, ON, Canada, 29 July–1 August 2005; pp. 32–36. [Google Scholar]
- Ortiz-Lopez, M.G.; Leyva-Ramos, J.E.; Carbajal-Gutierrez, E.; Morales-Saldana, J.A. Modelling and analysis of switch-mode cascade converters with a single active switch. IET Power Electron. 2008, 1, 478–487. [Google Scholar] [CrossRef]
- Lin, W.; Wang, J.; Huang, J.; Xu, Y. A Novel Tapped Inductor Bi-directional Buck-Boost Topology. In Proceedings of the 30th International Telecommunications Energy, San Francisco, CA, USA, 14–28 September 2008; pp. 1–5. [Google Scholar]
- Li, Q.; Hao, X.; Wang, J.; Li, X.; Li, H.; Li, H.; He, J. Metamaterials-based tunable perfect absorbers. Laser J. 2017, 38, 1–4. [Google Scholar]
- Karpelson, M.; Wei, G.; Wood, R.J. A Review of Actuation and Power Electronics Options for Flapping-Wing Robotic Insects. In Proceedings of the IEEE International Conference on Robotics and Automation, Pasadena, CA, USA, 19–23 May 2008; pp. 779–786. [Google Scholar]
- Steltz, E.; Seeman, M.; Avadhanula, S.; Fearing, R.S. Power Electronics Design Choice for Piezoelectric Microrobots. In Proceedings of the International Conference on Intelligent Robots and Systems, Beijing, China, 9–15 October 2006; pp. 1322–1328. [Google Scholar]
- Saheb, J.F.; Richard, J.F.; Sawan, M.; Meingan, R.; Savaria, Y. System integration of high voltage electrostatic MEMS actuators. Analog Integr. Circuits and Signal Process. 2007, 53, 27–34. [Google Scholar] [CrossRef]
- Chen, C.; Liu, M.; Wang, Y. A Dual Stage Low Power Converter Driving for Piezoelectric Actuator Applied in Micro Mobile Robot. Appl. Sci. 2018, 8, 1666. [Google Scholar] [CrossRef]
- Luo, F.L. Negative Output Luo-Converters, Voltage Lift Technique. IET Electr. Power 1999, 146, 208–224. [Google Scholar] [CrossRef]
- Luo, F.; Ye, H.; Rashid, M.H. Multiple-quadrant Luo-converters. IEE Proc. Electr. Power Appl. 2002, 149, 9–18. [Google Scholar] [CrossRef]
- Qin, A. Efficient application research on high frequency switching power supply. Laser J. 2017, 38, 208–211. [Google Scholar]
- Luo, F.L.; Ye, H. Positive output cascade boost converters. IEE Proc. Electr. Power Appl. 2004, 151, 590–606. [Google Scholar] [CrossRef]
- Chen, T.M.; Chen, C.L. Analysis and design of asymmetrical half bridge flyback converter. IEE Proc. Electr. Power Appl. 2002, 149, 433–440. [Google Scholar] [CrossRef]
- Jeong, G.Y. High efficiency asymmetrical half-bridge flyback converter using a new voltage-driven synchronous rectifier. IET Power Electron. 2010, 3, 18–32. [Google Scholar] [CrossRef]
- Chen, C.; Wang, Y. A review of fabrication options and power electronics for flapping-wing robotic insects. Int. J. Adv. Robot. Syst. 2013, 10, 151. [Google Scholar] [CrossRef]
- Dallago, E.; Danioni, A.; Ricotti, G.; Venchi, G. Single chip, Low Supply Voltage Piezoelectric Transformer Controller. In Proceedings of the 29th European Solid-State Circuits Conference, Estoril, Portugal, 16–18 September 2003; pp. 273–276. [Google Scholar]
- Campolo, D.; Sitti, M.; Fearing, R.S. Efficient charge recovery method for driving piezoelectric actuators with quasi-square waves. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2003, 50, 237–244. [Google Scholar] [CrossRef] [Green Version]
- Gahinet, P.; Arkadii, N.; Alan, J.L.; Mahmoud, C. The LMI control toolbox. In Proceedings of the 33th IEEE Conference on Decision and Control, Lake Buena Vista, FL, USA, 14–16 December 1994; pp. 2038–2041. [Google Scholar]
- Bouabdallah, S.; Andre, N.; Roland, S. PID vs LQ control techniques applied to an indoor micro quadrotor. In Proceedings of the IEEE International Conference on Intelligent Robots and Systems, Sendai, Japan, 28 September–2 October 2004; pp. 2451–2456. [Google Scholar]
- Clarke, D.W.; Peter, J.G. Self-tuning controller. Proc. Inst. Electr. Eng. 1975, 122, 929–934. [Google Scholar] [CrossRef]






















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Name/Manufacturer | Mass (g) | Wingspan (cm) | Flight Duration (min) |
|---|---|---|---|
| Microbat | 12.5 | 25 | 0.7 |
| Hummingbird | 19 | 16.5 | 4 |
| Phoenix | 1200 | - | - |
| H2bird | 13.6 | 26.5 | - |
| University of Arizona | 248 | 74 | 7 |
| University of Maryland | 425 | 107 | - |
| Robo Raven | 690 | 150 | 15 |
| Smart Bird | 450 | 50 | - |
| DelFly | 21 | 50 | - |
| DelFly Micro | 3.07 | 10 | - |
| Konkuk University | 7.36 | 12.5 | - |
| Bat Bot | 93 | 30 | - |
| Universite’ Libre de Bruxelles | 22 | 21 | 0.3 |
| Golden Snitch | 8 | 20 | 5 |
| Wasp AE | 1300 | 108 | 50 |
| Artificial Butterfly | - | - | A few seconds |
| Robobee (Harvard University) | 0.08 | 3 | - |
| Actuator Type | Maximum Strain (%) | Maximum Stress (MPa) | Specific Elastic Energy Density (J/g) | Maximum Efficiency (%) | Relative Speed |
|---|---|---|---|---|---|
| Dielectric elastomer (acrylic) | 380 | 7.2 | 3.4 | 60–80 | Medium |
| Dielectric elastomer (silicone) | 63 | 3.0 | 0.75 | 90 | Fast |
| Electrostatic | 50 | 0.03 | 0.0015 | >90 | Fast |
| Electromagnetic | 50 | 0.10 | 0.003 | >90 | Fast |
| Piezoelectric (ceramic) | 0.2 | 110 | 0.013 | 90 | Fast |
| Piezoelectric (single crystal) | 1.7 | 131 | 0.13 | 90 | Fast |
| Piezoelectric (polymer) | 0.1 | 4.8 | 0.0013 | 80 est. | Fast |
| Shape memory alloy | >5 | >200 | >15 | <10 | Slow |
| Shape memory polymer | 100 | 4 | 2 | <10 | Slow |
| Thermal polymer | 15 | 78 | 0.15 | <10 | Slow |
| Electro-chemo-mechanical Conducting polymer | 10 | 450 | 23 | <5% est. | Slow |
| Mechanochemical polymer | >40 | 0.3 | 0.06 | 30 | Slow |
| Components | Hybrid Voltage Multiplier | Tapped Inductor Boost Convertor | N-Stage Cascade Boost Converter | High Conversion Ratio Boost Converter | Class “E” Power Amplifier |
|---|---|---|---|---|---|
| Inductor | 1 | 1 | n | 1 | 1 |
| Capacitor | 2n | 1 | n | 3 | 1 |
| Diode | 2n + 1 | 1 | n + 1 | 3 | 2 |
| Switch | 1 | 1 | 1 | 1 | 1 |
| Gain | Fixed (≥100) |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, C.; Zhang, T. A Review of Design and Fabrication of the Bionic Flapping Wing Micro Air Vehicles. Micromachines 2019, 10, 144. https://doi.org/10.3390/mi10020144
Chen C, Zhang T. A Review of Design and Fabrication of the Bionic Flapping Wing Micro Air Vehicles. Micromachines. 2019; 10(2):144. https://doi.org/10.3390/mi10020144
Chicago/Turabian StyleChen, Chen, and Tianyu Zhang. 2019. "A Review of Design and Fabrication of the Bionic Flapping Wing Micro Air Vehicles" Micromachines 10, no. 2: 144. https://doi.org/10.3390/mi10020144
APA StyleChen, C., & Zhang, T. (2019). A Review of Design and Fabrication of the Bionic Flapping Wing Micro Air Vehicles. Micromachines, 10(2), 144. https://doi.org/10.3390/mi10020144