1. Introduction
Thermoelectric generators (TEGs) are devices used to convert thermal energy into electrical energy using the Seebeck effect by providing a temperature difference to thermoelectric (TE) elements [
1,
2]. Recently, the distribution of many sensors in various places in the environment has been proposed, and TEGs represent a potential power source for those sensors [
3,
4,
5,
6]. For example, there have been reports of bendable TEGs [
7,
8,
9,
10,
11,
12,
13,
14,
15] and stretchable TEGs [
16,
17] for IoT devices or wearable devices that attach to curved heat sources (such as piping, car bodies, and the human body). In particular, a stretchable TEG is needed so that it can be attached with low thermal contact resistance to curved heat sources and harvest energy from them [
16]. Furthermore, the TEG’s heat radiation performance is also important for power generation. Generally, the heat radiation performance is improved by attaching a heat radiation fin to the TEG. It is, however, difficult to attach a conventional heat radiation fin while maintaining stretchability because conventional fins are made from rigid and non-stretchable materials such as metals or ceramics. Thus, a stretchable TEG integrated with a fin for heat radiation has been necessitated. In previous studies, although the production of stretchable TEGs that used a folded substrate was reported, the folded substrate was not considered to be a heat radiation fin [
17]. Therefore, we decided to develop a stretchable TEG with a high heat radiation performance that uses a folded substrate as a heat radiation fin.
In this paper, we fabricated TEGs with origami-fins and measured their output voltage. In addition, the output voltage of the TEGs was simulated using a finite element method (FEM) model. Based on the output voltage obtained from both the measurements and the simulation, and the heat transfer coefficient between the origami-fin and air that was calculated from those results, the heat radiation performance of the origami-fin and the stability of the TEG during stretching were evaluated.
2. Design and Fabrication
Figure 1 shows the TEG with the origami-fin which we proposed. The stretchability of the TEG was produced by placing an origami-fin, which is a folded substrate, between the TE elements. In addition, the origami-fin acted as a heat radiation fin because its folding increased the surface area of the substrate. The local bending of the substrate within the origami-fin made the whole device stretchable, so the substrate material was not required to have inherent stretchability. Therefore, we were able to achieve a high heat radiation performance by using a substrate material with a high thermal conductivity. We used non-stretchable copper-polyimide film as the substrate material because it has a higher thermal conductivity than stretchable elastomeric substrate materials. Furthermore, since the origami-fin contains an undeformable flat plate region, it was possible to use rigid TE elements that exhibited a high thermoelectric conversion performance. In this study, a BiTe-based element, which is known to have a high figure of merit (
ZT) of approximately 1, was selected.
Figure 2 shows the fabrication process of the TEG with the origami-fin. We first fabricated the upper and lower substrates using copper-polyimide films (polyimide: 25 μm-thick, copper: 8 μm-thick). Using a UV laser processor (OPI Corporation, OLMUV-335-5A-K, Saitama, Japan), the copper layer of the film was scratched and patterned. Then, the film was cut by a UV laser processer. After the substrates were folded manually, a single pair of TE elements (TOSHIMA Manufacturing, Saitama, Japan, p-type: Bi
0.3Sb
1.7Te
3, n-type: Bi
2Te
3, 1.5 mm × 1.5 mm × 1 mm) and wirings were soldered onto the substrates. The TE elements were assembled in a π-type structure, which is a typical structure of the out-of-plane TEGs, electrically in series and thermally in parallel [
2].
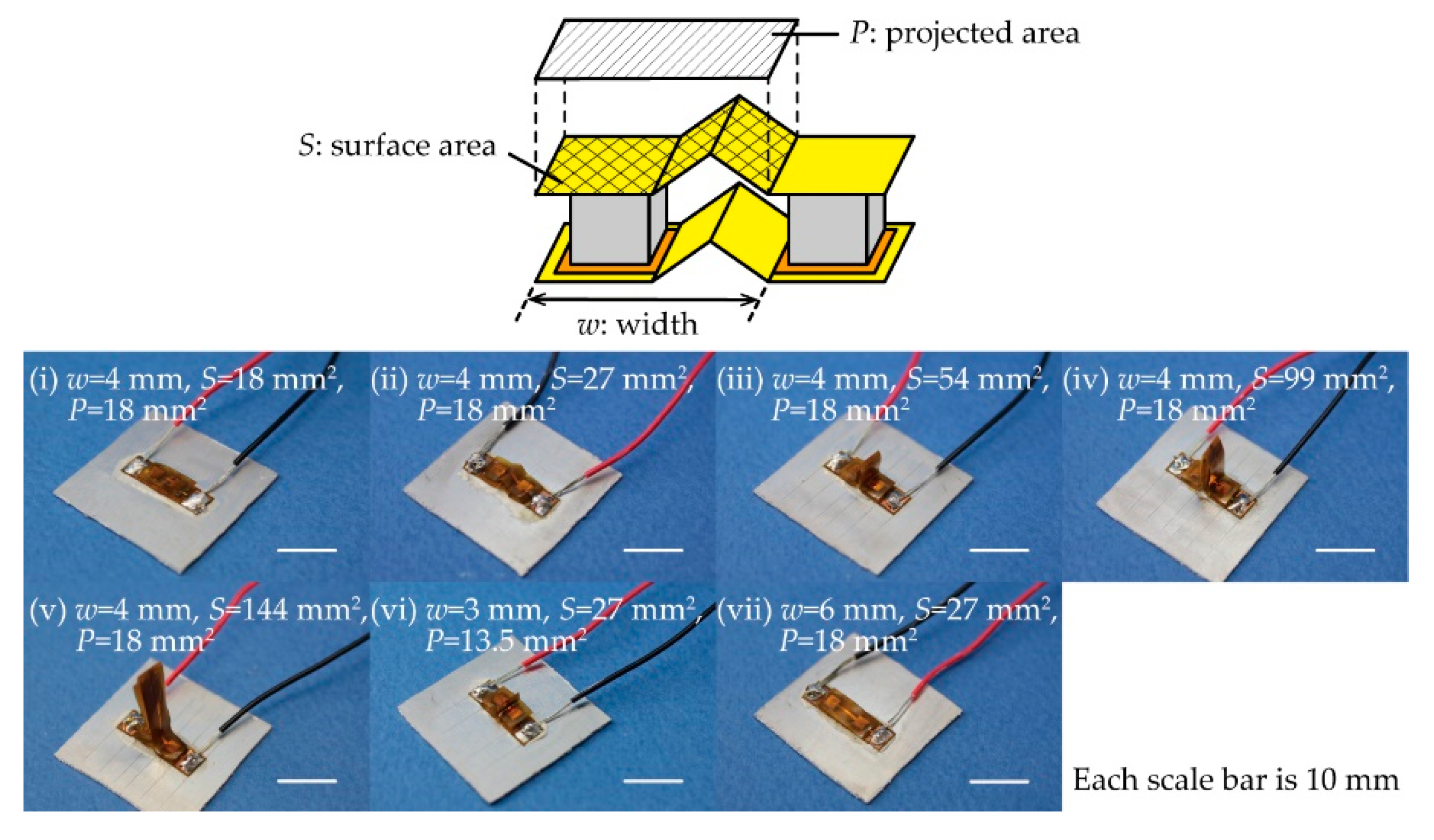
The fabricated TEGs are shown in
Figure 3. As shown in the top of
Figure 3, we defined an evaluation unit to contain one flat plate region and one folded region and defined the width as
w (mm), the substrate surface area as
S (mm
2), and the substrate projected area as
P (mm
2). Each TEG was fixed to an aluminum plate (25 mm × 25 mm × 0.5 mm) with an adhesive that had high thermal conductivity (Cemedine, SX1008, Tokyo, Japan) to maintain its shape and facilitate repeated experiments. First, in order to evaluate the heat radiation performance of the origami-fin, five types of TEGs containing origami-fins with various surface areas (
S of 18 mm
2, 27 mm
2, 54 mm
2, 99 mm
2, and 144 mm
2), were fabricated (
Figure 3i–v). All of these devices had a width of 4 mm, which means that all the projected areas were equal. The TEG with
S of 18 mm
2 was configured in a flat state with the same projected and surface area. The other four TEGs had larger surface areas that ranged from 1.5 to 8 times the projected area. Next, in order to evaluate the stability of the output when the origami-fins were stretched and contracted, three types of TEGs with origami-fins that had the same surface area and different widths were fabricated. Those TEGs had widths of 3 mm, 4 mm, and 6 mm, respectively, and were fabricated from a substrate with
S of 27 mm
2 (
Figure 3ii,vi,vii). The TEG with
w of 6 mm was maximally stretched so that it became flat, and the other two TEGs were contracted by folding the origami-fin.
3. Evaluation and Discussion
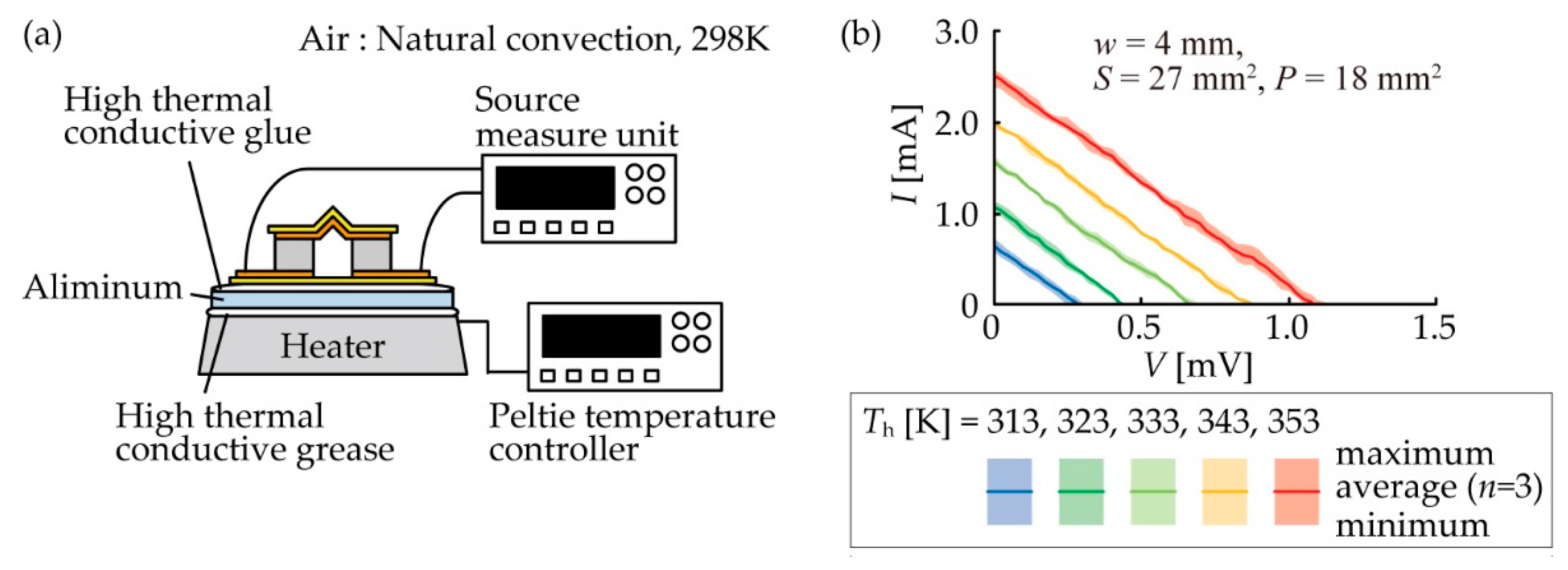
We obtained the open-circuit voltage (
VTEG) (V) of the TEGs by measurement and simulation to evaluate the heat radiation performance of the origami-fin and the dependence of the output stability on stretching. We first measured the current (
I) and voltage (
V) characteristics of the fabricated TEGs using the measurement setup shown in
Figure 4a and then calculated the
VTEG of the TEGs from the measured
I–V characteristics. The TEG with an origami-fin that was fixed to an aluminum plate was placed on a heater using grease that had high thermal conductivity (Shin-Etsu Silicones, G-747, Tokyo, Japan). The temperature of the heater was controlled by a Peltier temperature controller (VICS, VTH1.8K-70S, Tokyo, Japan) and was increased from 313 K to 353 K in increments of 10 K. The room temperature was approximately 298 K while these measurements were made. The output current was measured by sweeping the applied voltage to the device using a source measurement unit (Keithley Instruments, 2614B, Cleveland, OH, USA). Three experiments were performed using each device. The measured
I–V characteristics of the TEG with
w of 4 mm and
S of 27 mm
2 are shown in
Figure 4b as an example. We obtained the
VTEG from the
x-intercept of the regression line calculated by the least squares method. Measurements were taken at different temperatures to examine the dependence of the TEGs on temperature, but we set the
VTEG at 323 K for evaluation.
To confirm the validity of the measurements, we simulated the
VTEG using an FEM. As shown in
Figure 5, we created 2D simulations that were the same size and constructed of the same materials as the TEGs we fabricated. We set the temperature of the bottom of the device at 323 K and the heat transfer coefficient at 20 W/m
2·K for the outer boundaries of the model. This value was set within an appropriate range for the value of the heat transfer coefficient between the solid material and natural convection air [
18]. The thermal contact resistances between each material were not included in the model. We used this model to simulate a steady-state temperature distribution and calculated the
VTEG by multiplying the temperature difference between the top and bottom of the BiTe-based TE element (Δ
T) by the Seebeck coefficient of the TE element. The Seebeck coefficient of the BiTe-based TE element at a temperature of 323 K was obtained from
Sp−
Sn = 317.2 × 10
−6 V/K by the material data sheet, where
Sp and
Sn are the Seebeck coefficients of the p-type and n-type elements, respectively.
In addition, we introduced a heat transfer coefficient between a fin and the surrounding air (
hfin) using the previously obtained
VTEG in order to understand the heat radiation performance of the origami-fin. To derive
hfin, we used a simple model with only a TE element as shown in
Figure 6a. The temperature of the bottom of the element was
Th (K), the temperature of the top of the element was
Tc (K), and the temperature of the surrounding air was
Tair (K). The thermal conductivity of the element was
κ (W/m·K) and the thickness of the element was
t (m). Assuming that heat flux is constant, if the heat transfer coefficient between the element and air is
h0 (W/m
2·K), the temperature difference Δ
T0 (=
Th−
Tc) occurring in the TE element can be obtained as follows:
Alternatively, when a fin was attached to the top of the element, we assumed the heat transfer coefficient between the fin and air was
hfin and the temperature difference applied to the element was Δ
Tfin. Then, Δ
Tfin can be obtained in the same way as Δ
T0:
where
Tc’ is the temperature of the top of the TE element with the fin. Therefore, the relationship between Δ
Tfin and Δ
T0 can be described as follows:
Note that the thermal conductivity of the BiTe-based TE element,
κ, is about 1 W/m·K. Thus, if the thickness of the element
t is about 1 mm, as it was in this study, the order of magnitude of
κ/
t is 10
3 W/m
2·K. In contrast, the heat transfer coefficient between the solid materials and air was reported to be in the order of 10
0 to 10
1 W/m
2·K during natural convection [
18], which is very small compared to
κ/
t and can therefore be ignored in the calculations. So, Equation (1) can be expressed as:
If the
VTEG of the flat TEG with the smallest surface area among the TEGs we simulated (
S of 18 mm
2) is
V0 and the
VTEGs of the other origami-fin devices are
Vfin, the ratio of
Vfin to
V0 can be described as follows:
This is possible because the
VTEG (V) is equal to the product of the temperature difference
ΔT (K) and the Seebeck coefficient of the element (
Sp−
Sn) (V/K). Therefore, from Equations (2) and (3), we can express
hfin using both the measured
V0 and
Vfin and an arbitrarily set
h0 as follows:
In this study, we set
h0 at 20 and calculated
hfin. The results with both measured and simulated
VTEG are shown in
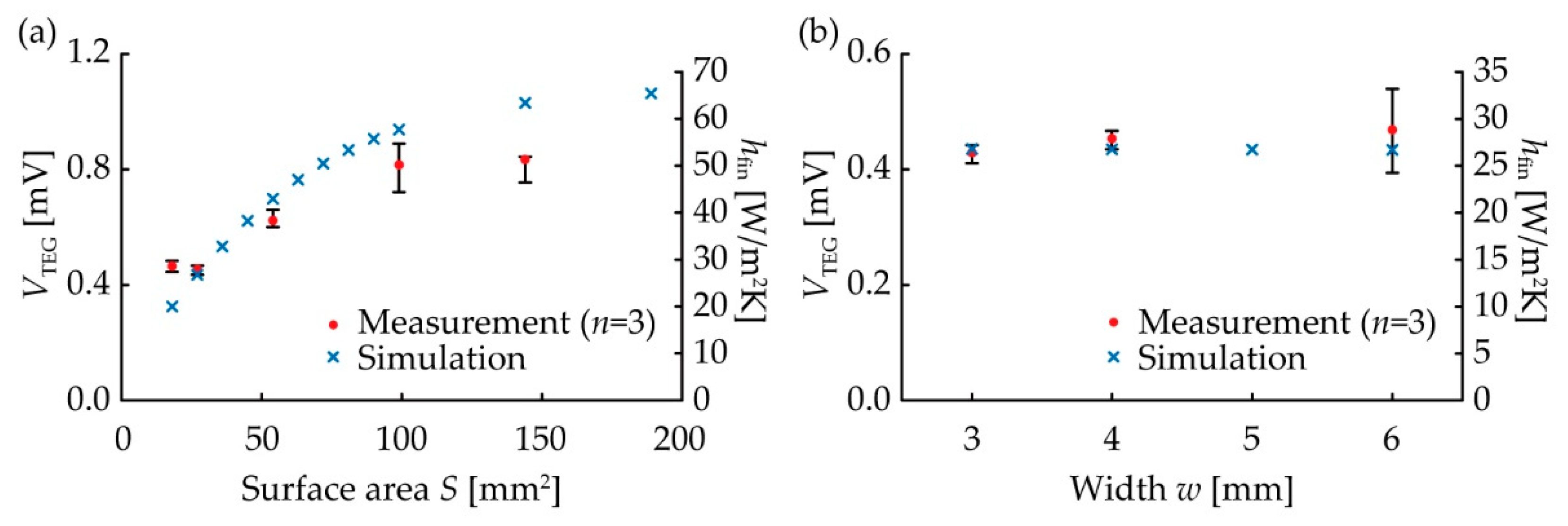
Figure 7.
As shown in
Figure 7a, both the measured and simulated
VTEG were improved by the origami-fin. This indicates that the origami-fin worked as a heat radiation fin. In the simulation, the
VTEG increased as
S increased. The measurement results showed that all TEGs with the origami-fin that had surface areas greater than 54 mm
2 showed a higher
VTEG than the flat TEG with a surface area of 18 mm
2. The
VTEG of the TEG with
S of 144 mm
2 was 1.9 times as high as that of the flat TEG. In other words, the heat radiation fin with an
hfin that was 1.9 times as large as that of the unfolded flat substrate was achieved by folding the substrate to increase its surface area. The value of the
VTEG changed when the type of TE element changed, but
hfin can be used as an index of the heat radiation performance of the origami-fin that does not change unless the setting of
h0 is changed. These results confirmed that the output of the TEG can be increased by the presence of an origami-fin because the origami-fin can function as a heat radiation fin. Next, regarding the relationship between width and
VTEG and
hfin (
Figure 7b), the measured and the simulated values were almost constant regardless of the device width. In the measurements, the
VTEG of the TEG with
w of 3 mm was 92% of the
VTEG of the flat TEG with
w of 6 mm. This means that even if the origami-fin width was reduced by 50%,
hfin would only decrease by 8%. These results confirmed that the stability of the origami-fin was not affected by deformation caused by stretching and contracting. This means that it was possible to use an origami-fin to construct a stretchable TEG integrated with a heat radiation fin.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}






