Modeling and Experimental Study of Double-Row Bow-Type Micro-Displacement Amplifier for Direct-Drive Servo Valves

Abstract
:1. Introduction
2. Static Analysis of Double-Row Bow-type Micro-Displacement Amplifier (DBMA)
3. Kinetic Analysis of DBMA
4. Simulation Research on DBMA
5. Experimental Verification of DBMA
6. Discussion
- (a)
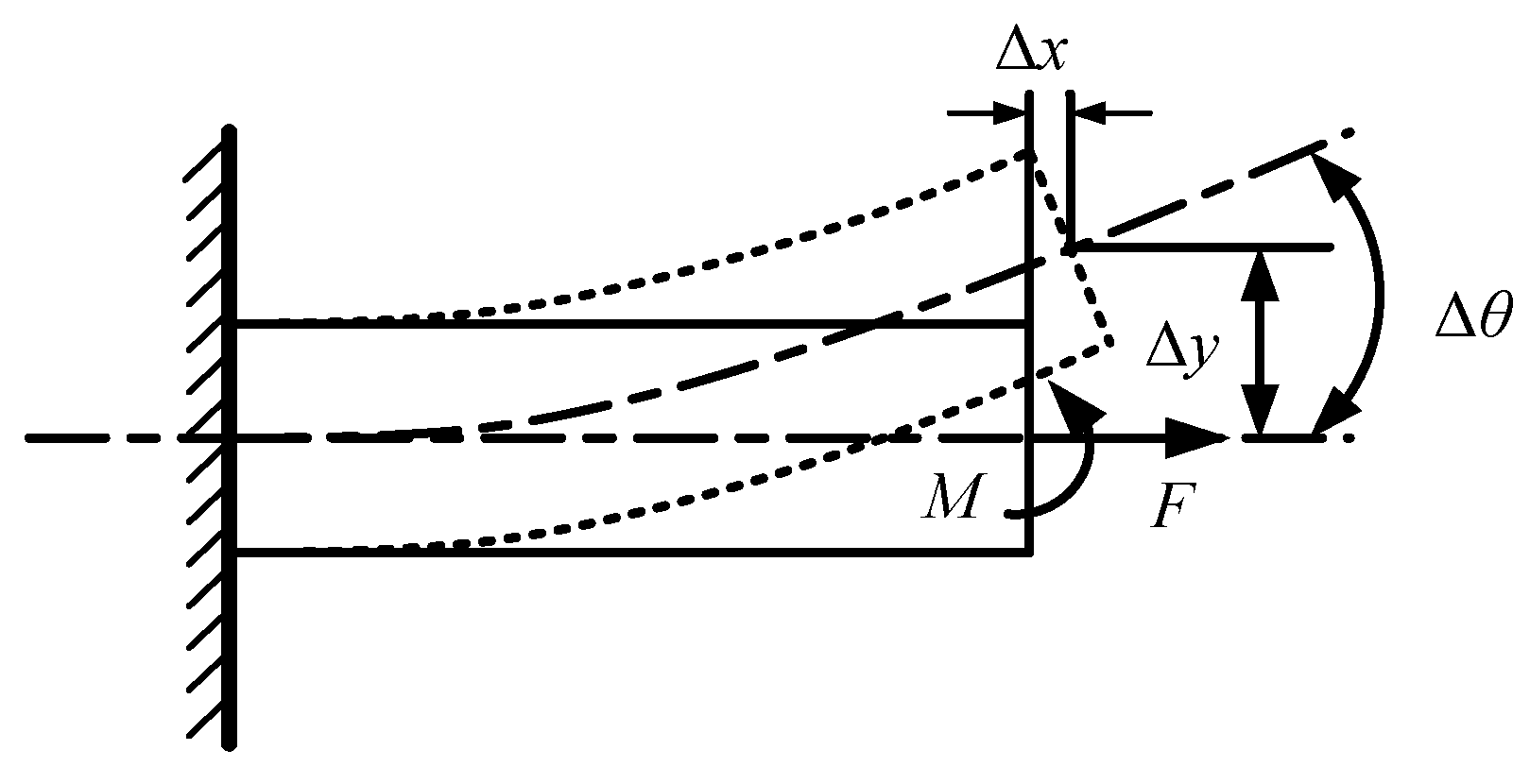
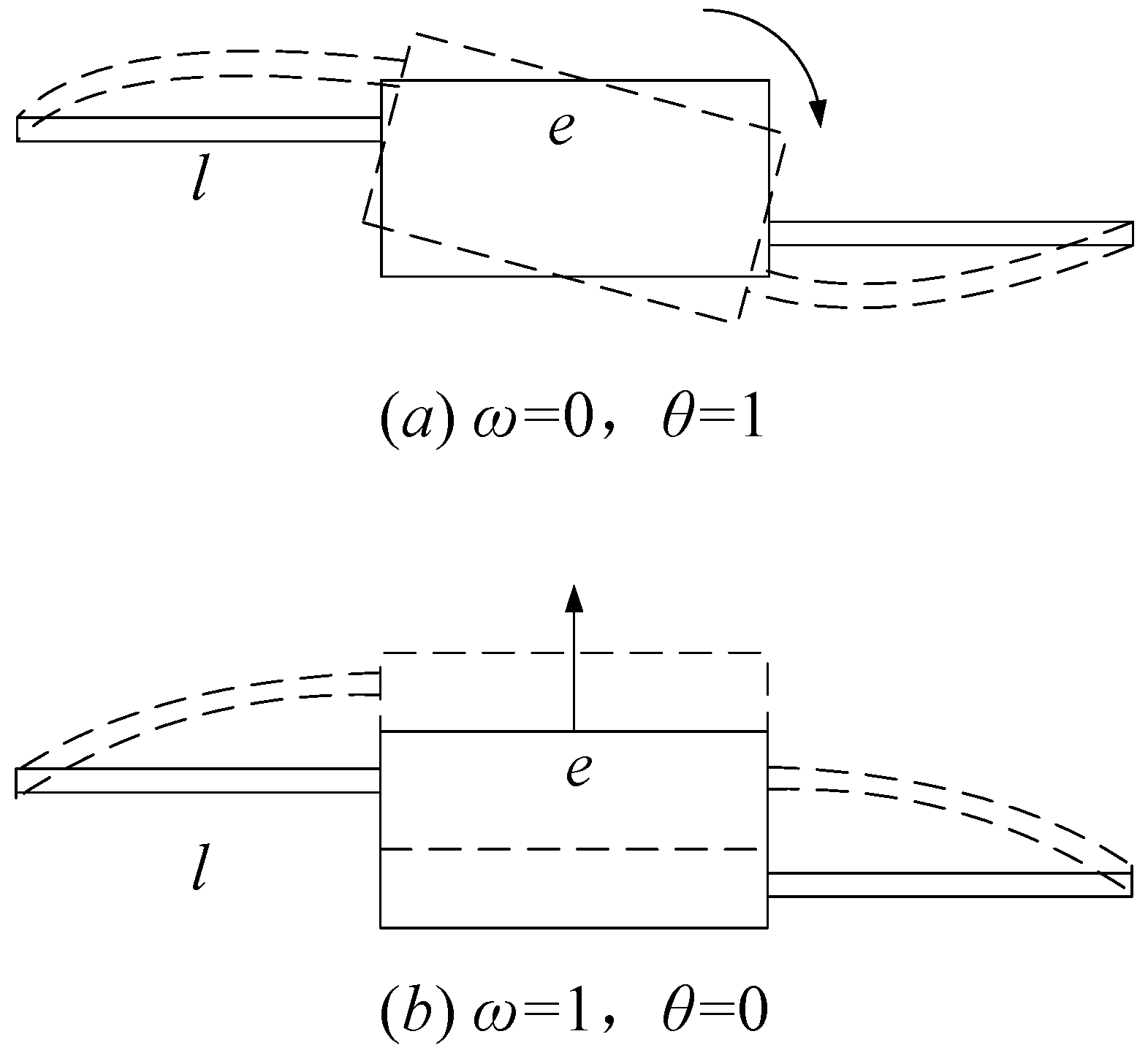
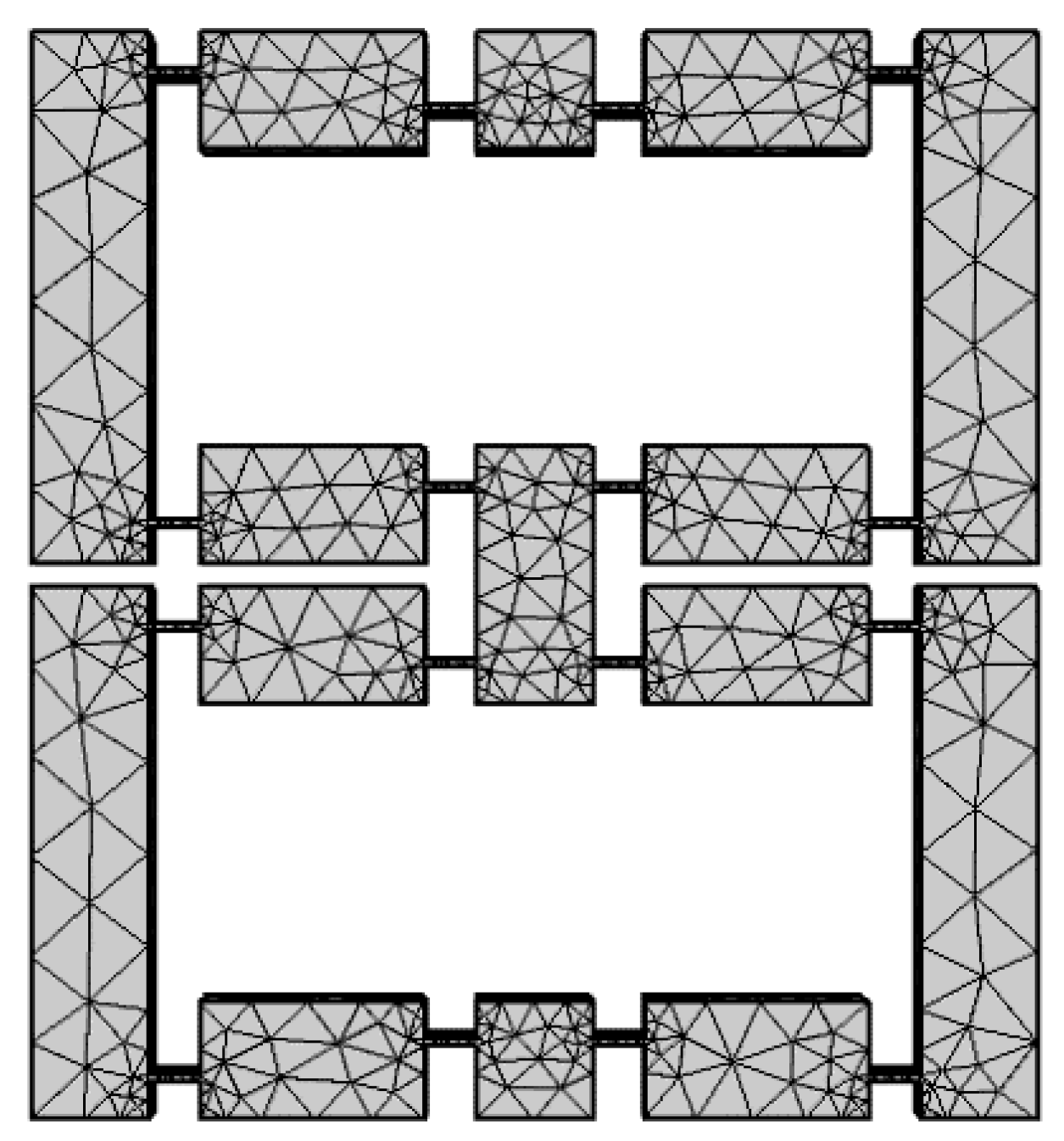
- In mathematical modeling, we did not discuss the size of the model, so mathematical models were established at the micron and millimeter levels. However, it should be noted that the condition for the assumption in Figure 4 was that the thickness of the arm needed to be much larger than the flexure hinge, in order to treat the arm as a rigid body, and the flexure hinge as a thin plate with fixed ends to simplify the model.
- (b)
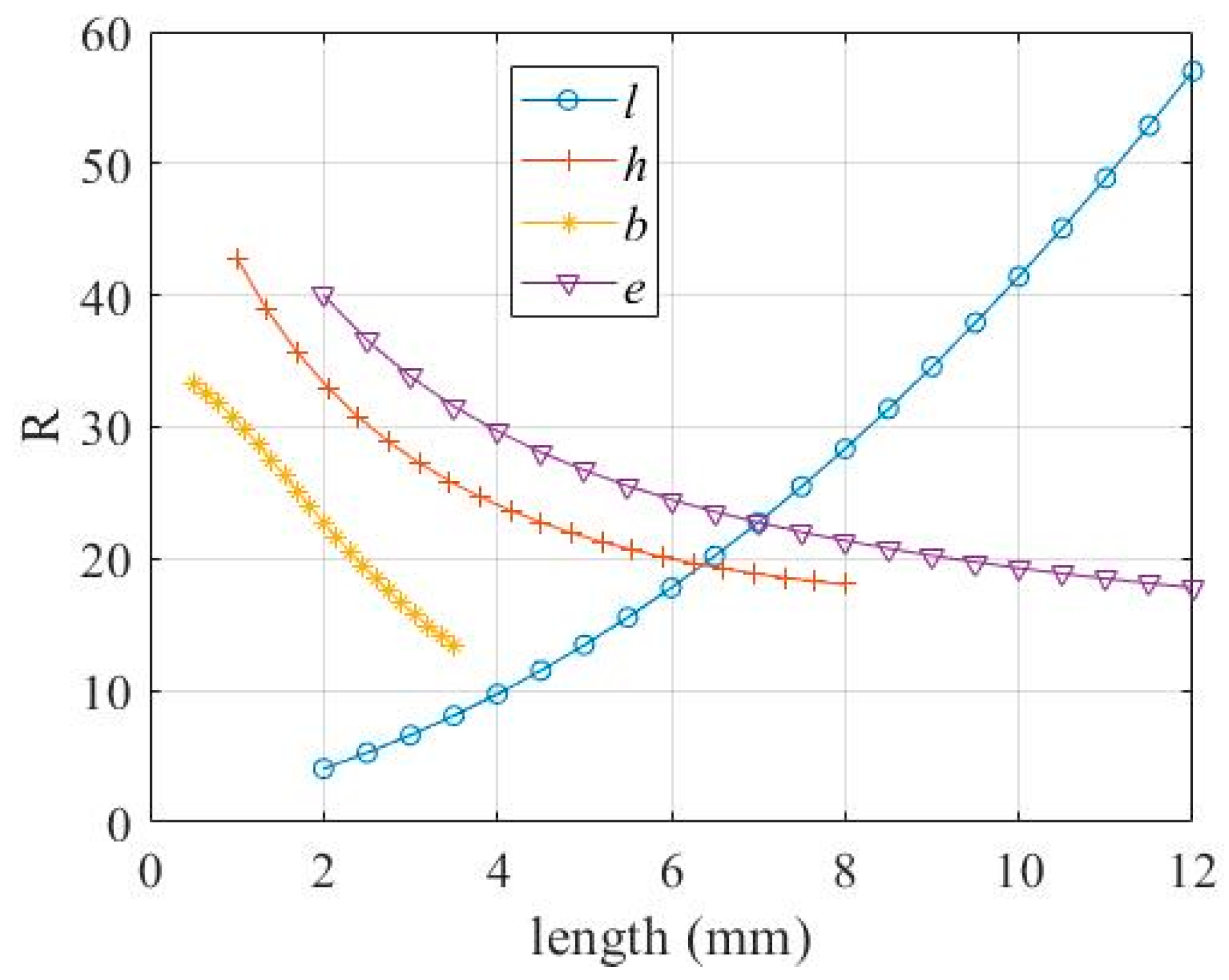
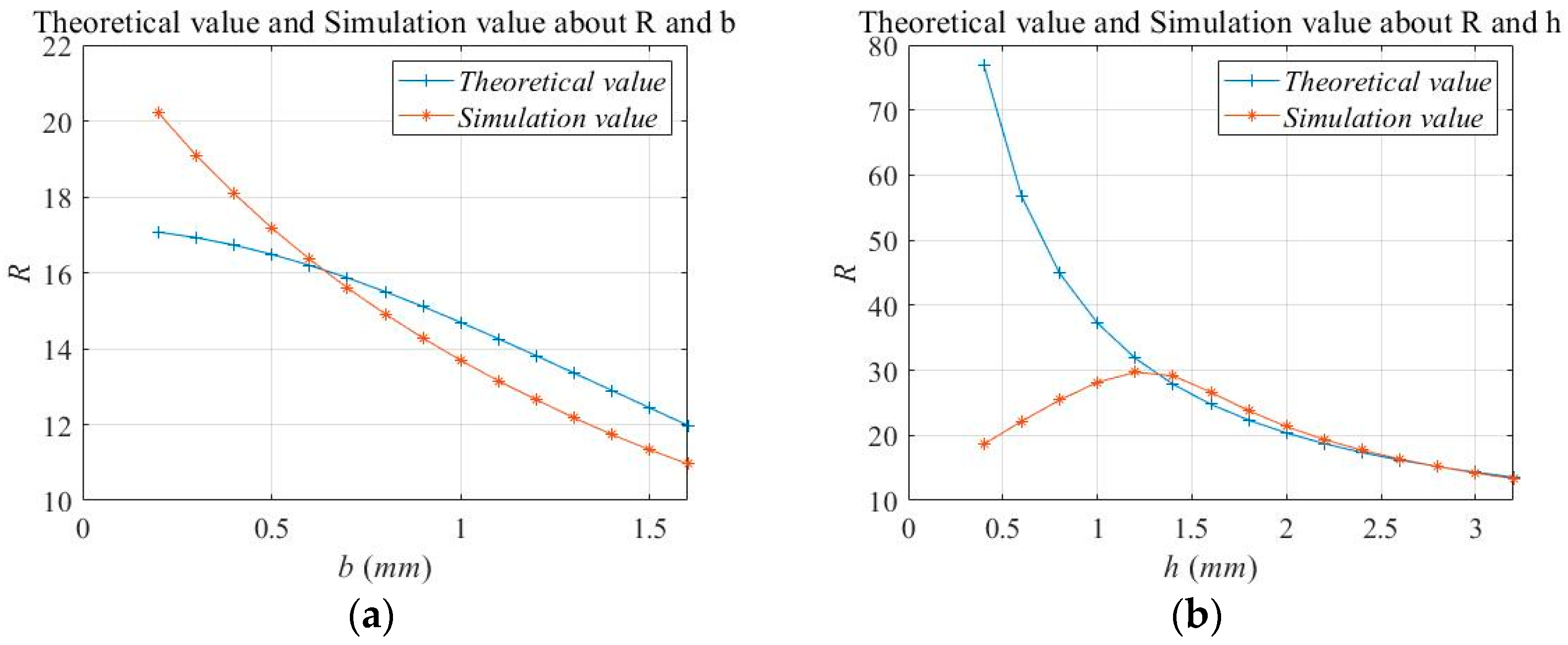
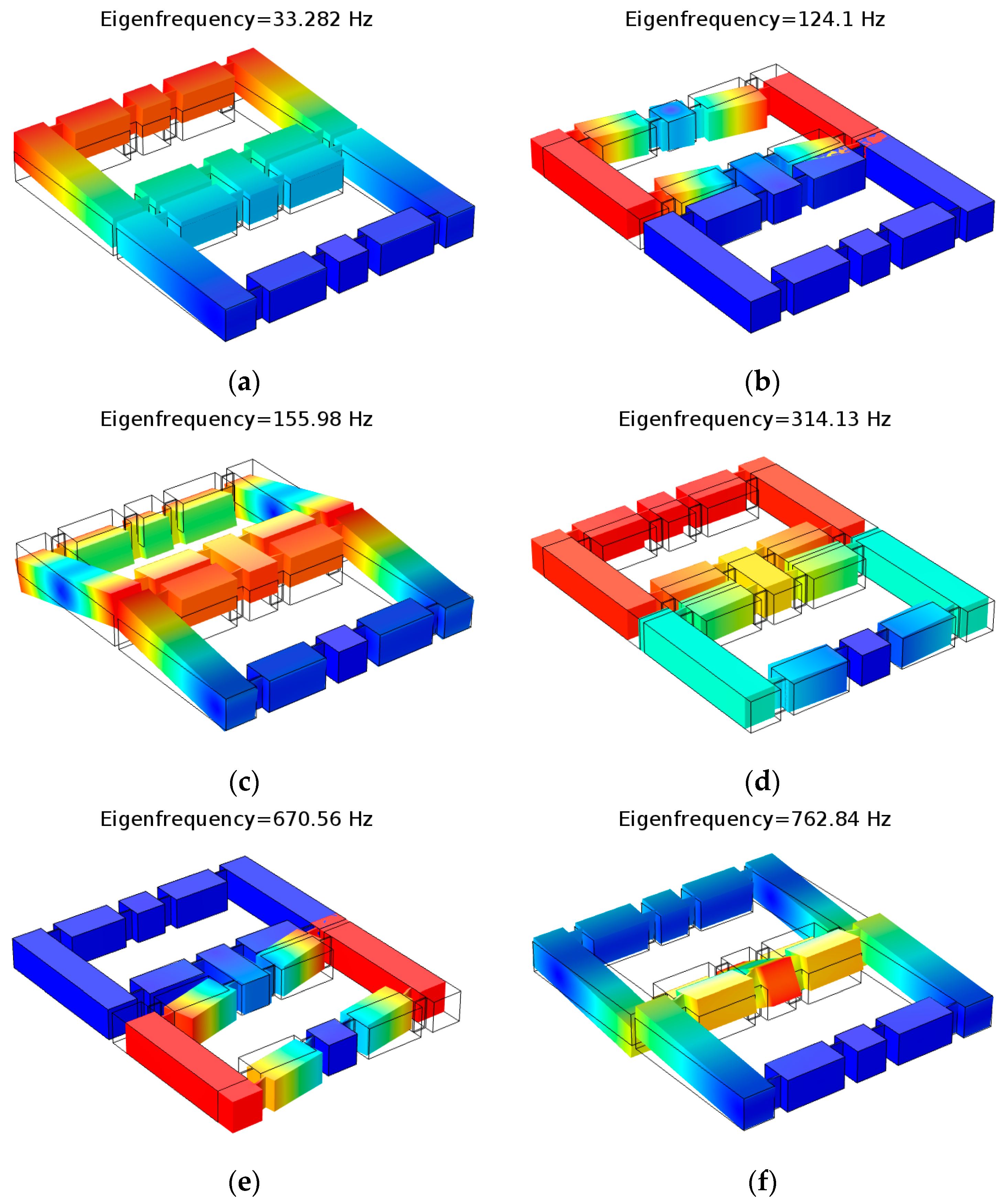
- In the simulation analysis, we actually established more than one size model. The simulation results show that when all the size parameters of the model were enlarged or reduced in proportion, there was no effect on the amplification ratio. When only a few parameters were changed, the results changed. These results are shown in Figure 9, Figure 10 and Figure 13.
- (c)
- Since the size of the actuator of the giant magnetostrictive servo valve reached the millimeter level and an amplifier was used with the actuator, we did not make a smaller prototype for experiments. However, from the results of mathematical modeling and simulation, we believe that such structures and modeling methods would be correct at larger or smaller sizes.
7. Conclusions
- This paper establishes a pseudo-rigid model of DBMA, analyzes the stress form of flexure hinge, and derives the stiffness matrix of flexure hinge by the influence coefficient method.
- A static and kinetic analysis of DBMA was carried out, and a formula of displacement magnification was derived. Using Castigliano’s second theorem, a formula of equivalent stiffness and natural frequency of DBMA were derived. The effects of different parameters on the magnification, equivalent stiffness, and natural frequency were analyzed, respectively.
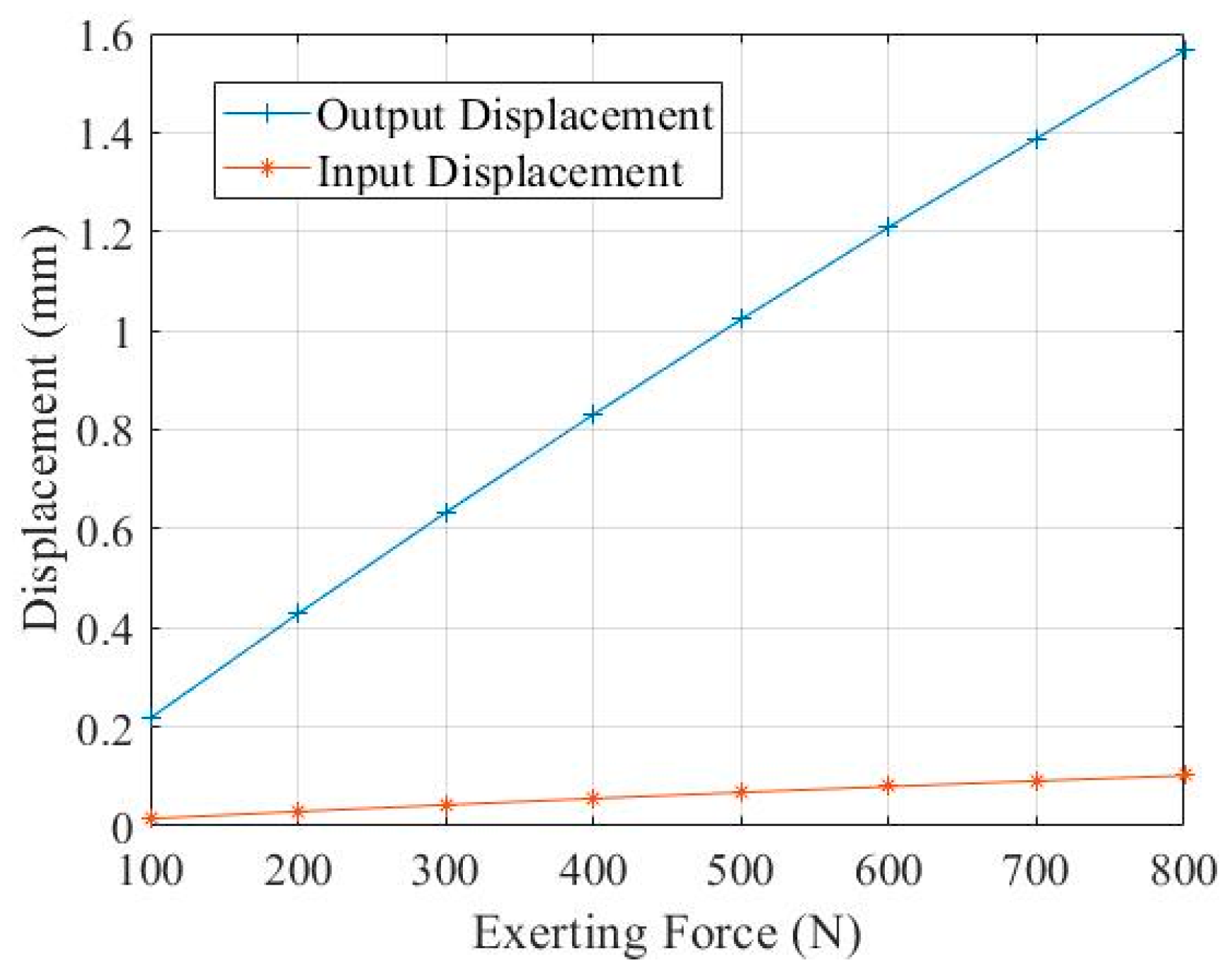
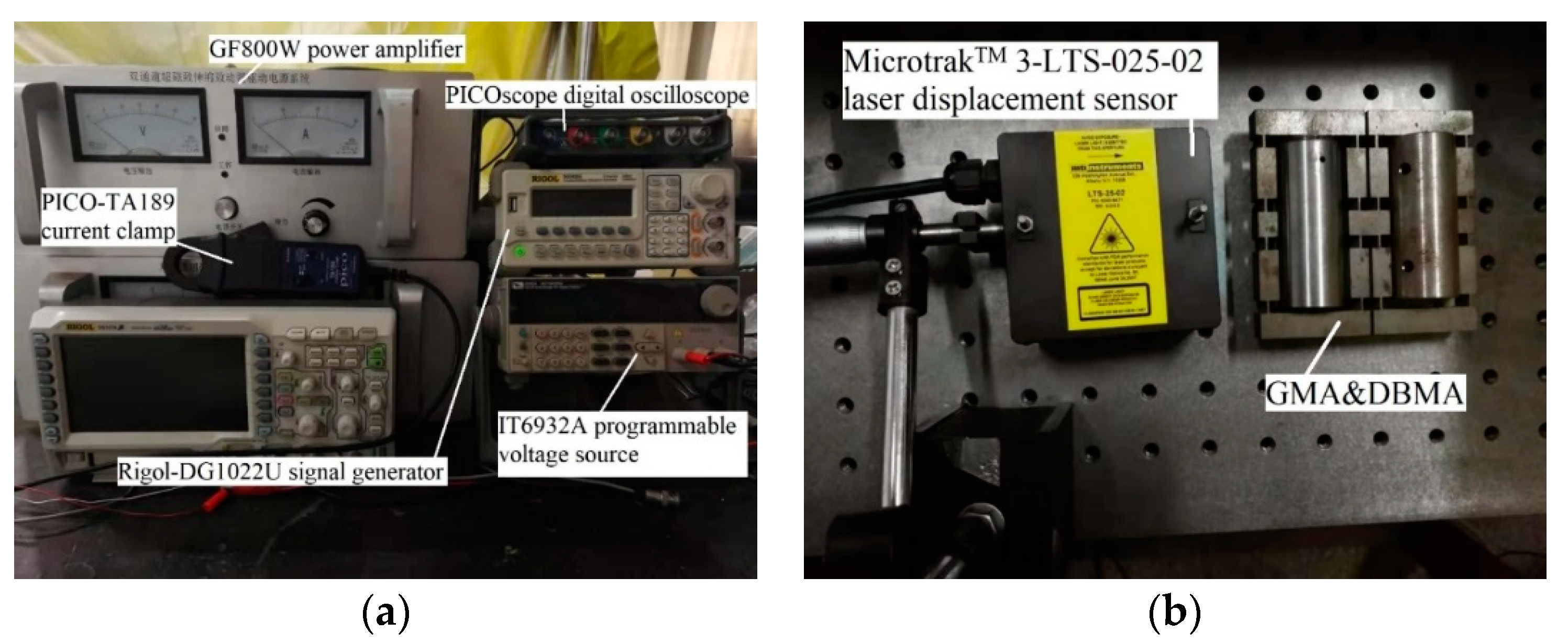
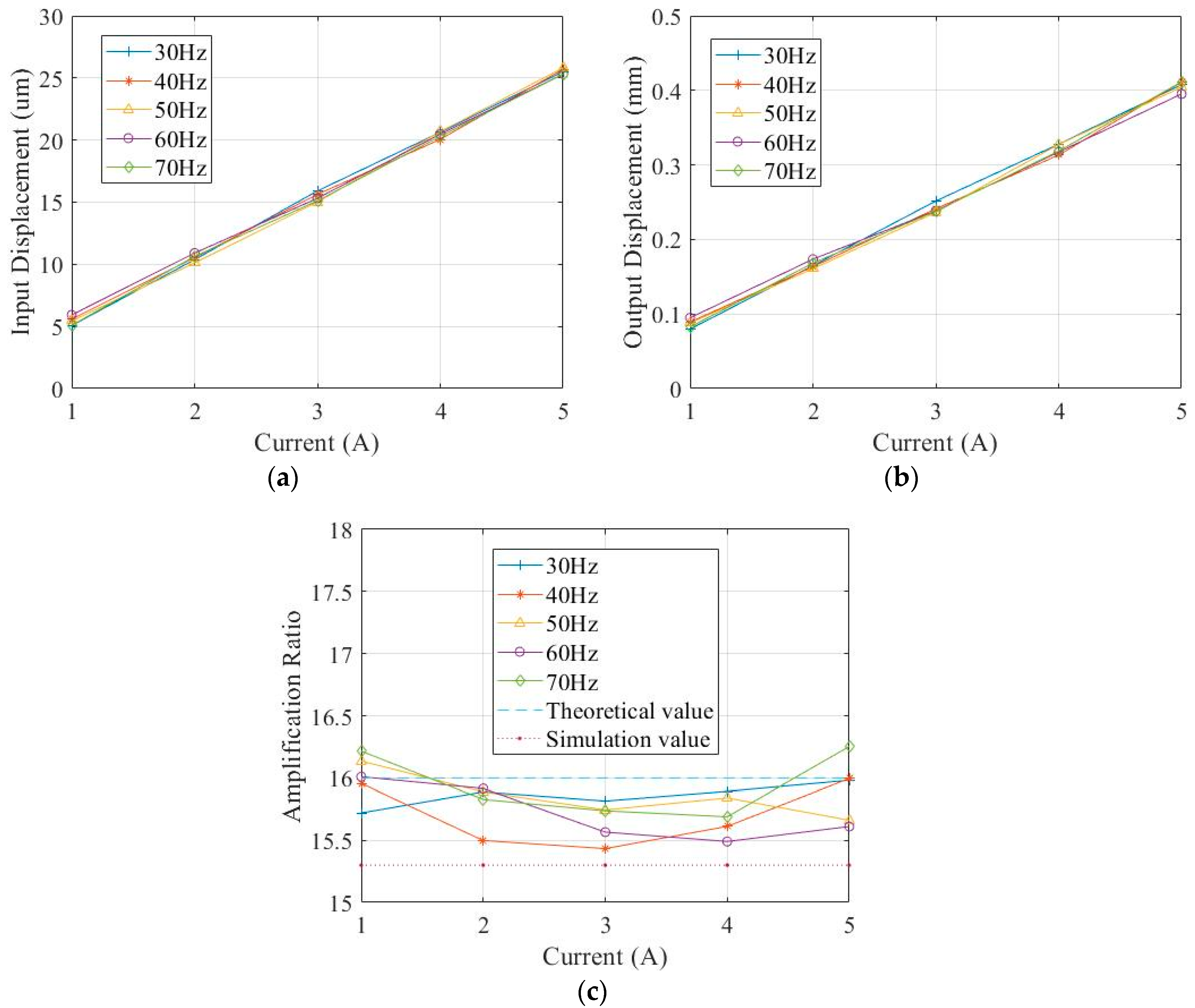
- A simulation of DBMA was carried out using FEM simulation software. A prototype of DBMA was fabricated, a corresponding test system was built, and experimental research was conducted. Errors of theoretical calculation, simulation results, and experimental data were all within 8%, which supported the correctness of the model.
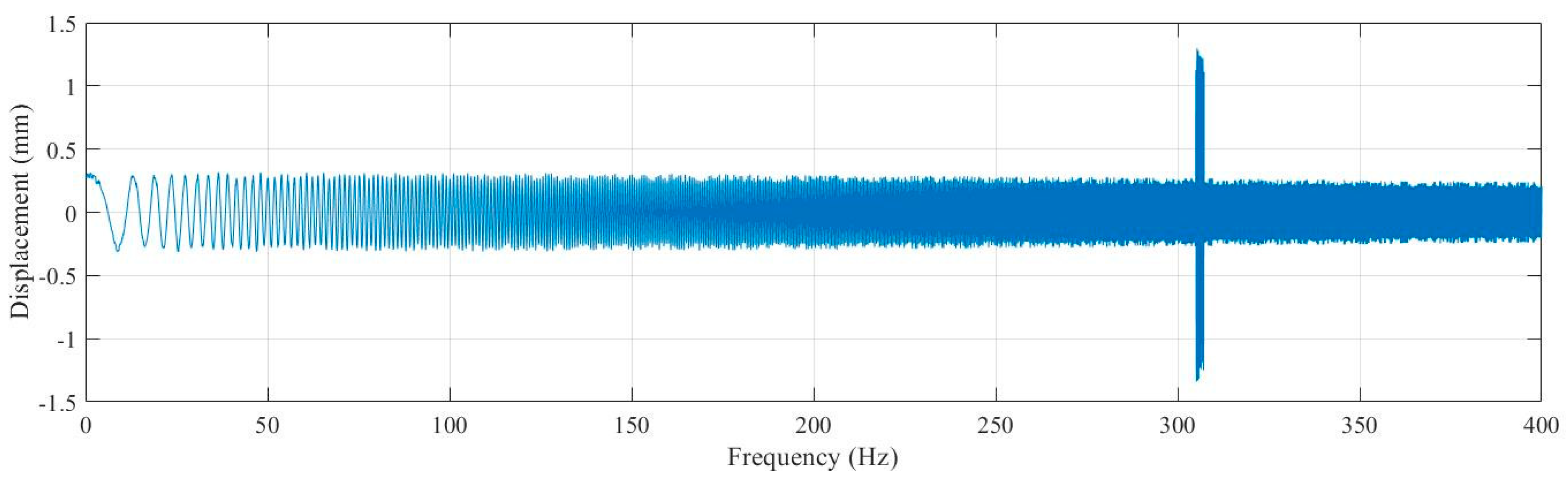
- Theoretical research and experimental results show that the displacement amplification ratio of DBMA was stable at about 15.5, the natural frequency is about 305Hz to 314Hz, and the response bandwidth was up to 300 Hz, which satisfy the servo valve output requirements.
Author Contributions
Funding
Conflicts of Interest
References
- Olabi, A.-G.; Grunwald, A. Design and application of magnetostrictive materials. Mater. Des. 2008, 29, 469–483. [Google Scholar] [CrossRef] [Green Version]
- Engdahl, G. Handbook of Giant Magnetostrictive Materials; Academic Press: Cambridge, MA, USA, 2000. [Google Scholar]
- Janocha, H. Application potential of magnetic field driven new actuators. Sens. Actuators A Phys. 2001, 91, 126–132. [Google Scholar] [CrossRef]
- Goodfriend, M.; Sewell, J.; Jones, C. Application of a magnetostrictive alloy, terfenol-D to direct control of hydraulic valves. SAE Trans. 1990, 364–369. [Google Scholar]
- Goodfriend, M. Material Breakthrough Spurs Actuator Design. Mach. Des. 1991, 63, 147–150. [Google Scholar]
- Urai, T.; Tanaka, H. Development of a Giant Magnetostrictive Actuator and the Application to a Servo valve. Trans. Jpn. Hydraul. Pneumatics Soc. 2001, 32, 53–57. [Google Scholar]
- Richard, J.A. Magnetostrictive Valve Assembly. U.S. Patent 7,469,878, 30 December 2008. [Google Scholar]
- Karunanidhi, S.; Singaperumal, M. Design, analysis and simulation of magnetostrictive actuator and its application to high dynamic servo valve. Sens. Actuators A 2010, 157, 185–197. [Google Scholar] [CrossRef]
- Wang, C. Giant magnetostrictive actuator in servo valve and micro pipe robot. Chin. J. Mech. Eng. 2005, 18, 10. [Google Scholar] [CrossRef]
- Li, L.; Zhang, C.; Yan, B.; Li, X. Research of a Giant Magnetostrictive Value with Internal Cooling Structure. IEEE Trans. Magn. 2011, 47, 2897–2900. [Google Scholar] [CrossRef]
- Zhu, Y.; Li, Y. A novel jet pipe serve valve driven by giant magnetostrictive actuator. Piezoelectr. Acoustoopt. 2010, 32, 574–577. [Google Scholar]
- Tanaka, H.; Urai, T. Development of a Giant Magnetostrictive Tandem Actuator and the Application to a Servo Valve. Trans. ISCIE 2001, 14, 110–116. [Google Scholar]
- Sun, T.; Li, G.; Lou, J.; Qiu, H. Design of a New Fast Servo Tool Based Flexible Hinges. J. Vib. Shock 2016, 35, 160–166. [Google Scholar]
- Yoon, H.-S.; Washington, G.; Eyabi, P.; Radhamohan, M.; Woodard, S.W.; Dayton, R. A Millimeter-Stroke Piezoelectric Hybrid Actuator using Hydraulic Displacement Amplification Mechanism. In Proceedings of the 2006 IEEE International Symposium on Industrial Electronics, Montreal, QC, Canada, 9–13 July 2006; pp. 2809–2813. [Google Scholar]
- Yu, J. Design and Simulation Study on New Servo Valve Direct Driven by Piezoelectric Actuator Using Hydraulic Amplification. J. Mech. Eng. 2013, 49, 151. [Google Scholar] [CrossRef]
- Paros, J.M.; Weisboro, L. How to design flexure hinges. Mach. Des. 1965, 37, 151–157. [Google Scholar]
- Xue, S.; Li, Q. Design of Precision Instruments; Tsinghua University Press: Beijing, China, 1991. [Google Scholar]
- Pardeshi, S.; Kandharkar, S.; Deshmukh, B. Monolithic compliant slider crank mechanism for motion amplification. Mater. Today Proc. 2017, 4, 1677–1682. [Google Scholar] [CrossRef]
- Huang, W.; Shi, X.; Wang, Y. Design of diamond piezoelectric micro displacement amplification mechanism. Opt. Precis. Eng. 2015, 23, 803–809. (In Chinese) [Google Scholar] [CrossRef]
- Huang, Z.; Mei, J.; Ming, T.; Hu, J.; Chen, D. Design and Analysis of Micro-displacement Mechanism Based on Flexure Hinge. Hoisting Conveying Mach. 2017, 3, 15–19. [Google Scholar]
- Lobontiu, N.; Garcia, E. Analytical model of displacement amplification and stiffness optimization for a class of flexure-based compliant mechanisms. Comput. Struct. 2003, 81, 2797–2810. [Google Scholar] [CrossRef]
- Wan, J.; Zhong, L. Study and Analysis of Amplification Ratio Characteristics of Bridge Micro-displacement Amplification Mechanism. China Water Transp. 2018, 18, 117–119. [Google Scholar]
- Mikio, M.; Shin, S. Displacement Amplifier for Piezoelectric Actuator Based on Honeycomb Link Mechanism. Sens. Actuators A 2010, 157, 84–90. [Google Scholar]
- Dong, W.; Chen, F.; Gao, F.; Yang, M.; Sun, L.; Du, Z.; Tang, J.; Zhang, D. Development and analysis of a bridge-lever-type displacement amplifier based on hybrid flexure hinges. Precis. Eng. 2018, 54, 171–181. [Google Scholar] [CrossRef]
- Ling, M.; Cao, J.; Jiang, Z.; Lin, J. Theoretical modeling of attenuated displacement amplification for multistage compliant mechanism and its application. Sens. Actuators A 2016, 249, 15–22. [Google Scholar] [CrossRef]
- Chen, S.; Ling, M.; Zhang, X. Design and experiment of a millimeter-range and high-frequency compliant mechanism with two output ports. Mech. Mach. Theory 2018, 126, 201–209. [Google Scholar] [CrossRef]
- Zhang, Z.; Su, J.; Hu, H. Optimum Design of Bridge-Type Compliant Mechanism with Direct Coupling. Robot 2010, 32, 119–124. [Google Scholar] [CrossRef]
- Ye, G.; Li, W.; Wang, Y.; Yang, X.; Yu, L. Analysis on Displacement Amplification Ratio of a Flexible Bridge-Type Micro-Displacement Mechanism. Robot 2011, 33, 251–256. [Google Scholar] [CrossRef]
- Li, W.; Ye, G.; Wang, Y.; Yang, X. Study of Properties of a kind of Bridge-type Micro-displacement Mechanism. J. China Univ. Min. Technol. 2011, 40, 148–152. [Google Scholar]
- Liu, G.; He, Z.; Zheng, J.; Zhou, J.; Bai, G. The Development of Micro-displacement Amplifier Applied on Electrohydraulic Servo Valve. Chin. Hydraul. Pneum. 2020, 1, 66–73. (In Chinese) [Google Scholar]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
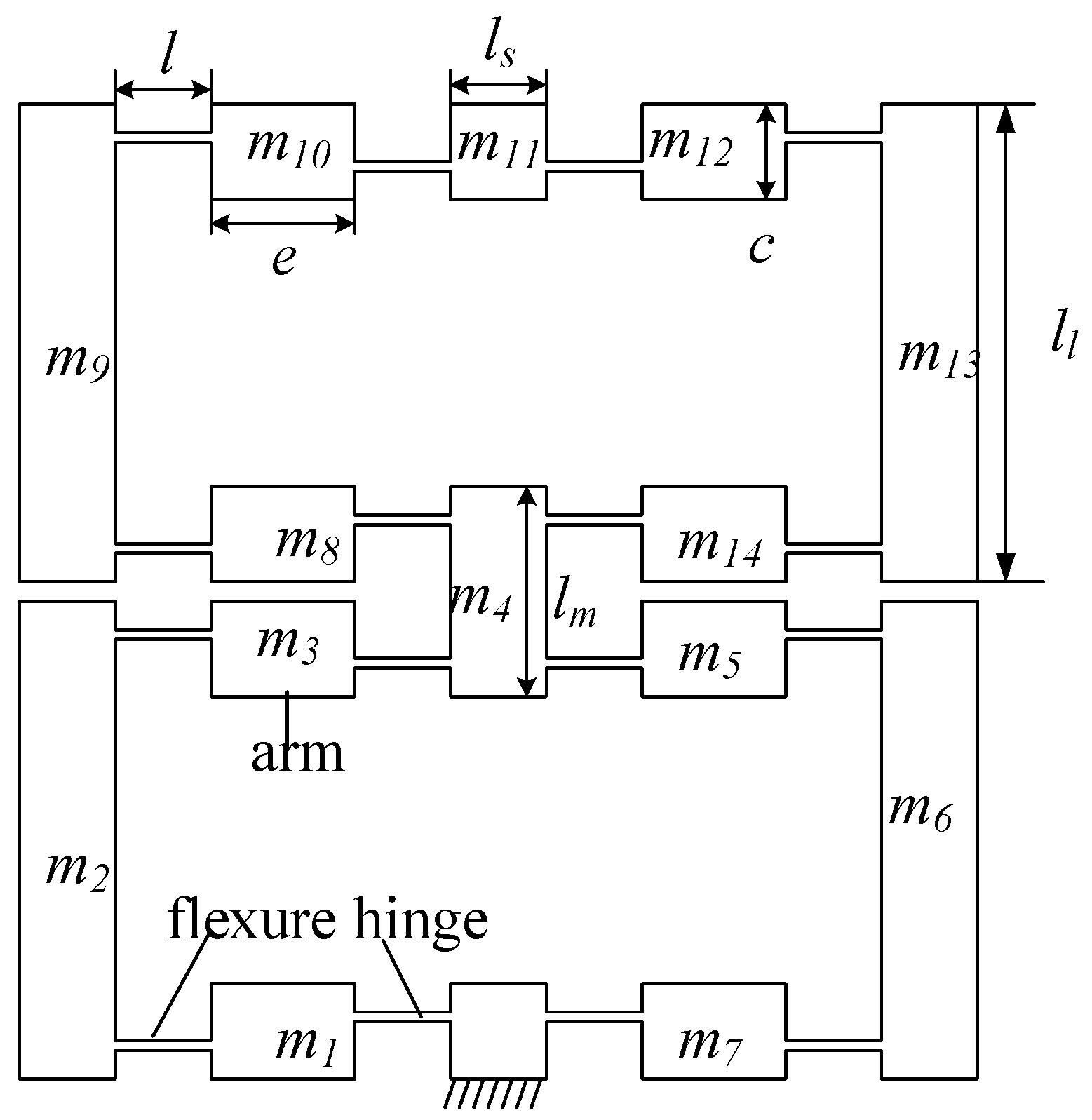
| Parameters | Description | Value |
|---|---|---|
| c | Width of arms 1,3,5,7,8,10,12,14 | 10 mm |
| a | Width of arms 2,6,9,13 | 10 mm |
| d | Thickness of the amplifier (also the width of the flexure hinge) | 10 mm |
| l | Length of the flexure hinge | 4.41 mm |
| e | Length of the arms 2,6,9,11 | 19.90 mm |
| ls | Width of arm 11 | 9 mm |
| ll | Length of arms 2,6,9,13 | 45.47 mm |
| E | Elastic modulus of the material | 215 Mpa |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, G.; He, Z.; Bai, G.; Zheng, J.; Zhou, J.; Chang, M. Modeling and Experimental Study of Double-Row Bow-Type Micro-Displacement Amplifier for Direct-Drive Servo Valves. Micromachines 2020, 11, 312. https://doi.org/10.3390/mi11030312
Liu G, He Z, Bai G, Zheng J, Zhou J, Chang M. Modeling and Experimental Study of Double-Row Bow-Type Micro-Displacement Amplifier for Direct-Drive Servo Valves. Micromachines. 2020; 11(3):312. https://doi.org/10.3390/mi11030312
Chicago/Turabian StyleLiu, Guoping, Zhongbo He, Guo Bai, Jiawei Zheng, Jingtao Zhou, and Ming Chang. 2020. "Modeling and Experimental Study of Double-Row Bow-Type Micro-Displacement Amplifier for Direct-Drive Servo Valves" Micromachines 11, no. 3: 312. https://doi.org/10.3390/mi11030312
APA StyleLiu, G., He, Z., Bai, G., Zheng, J., Zhou, J., & Chang, M. (2020). Modeling and Experimental Study of Double-Row Bow-Type Micro-Displacement Amplifier for Direct-Drive Servo Valves. Micromachines, 11(3), 312. https://doi.org/10.3390/mi11030312