Design Applicable 3D Microfluidic Functional Units Using 2D Topology Optimization with Length Scale Constraints

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Problem Statement
2.1. Fluid Flow Model
2.2. Electric Circuit Analogy Method
3. Numerical Experiments
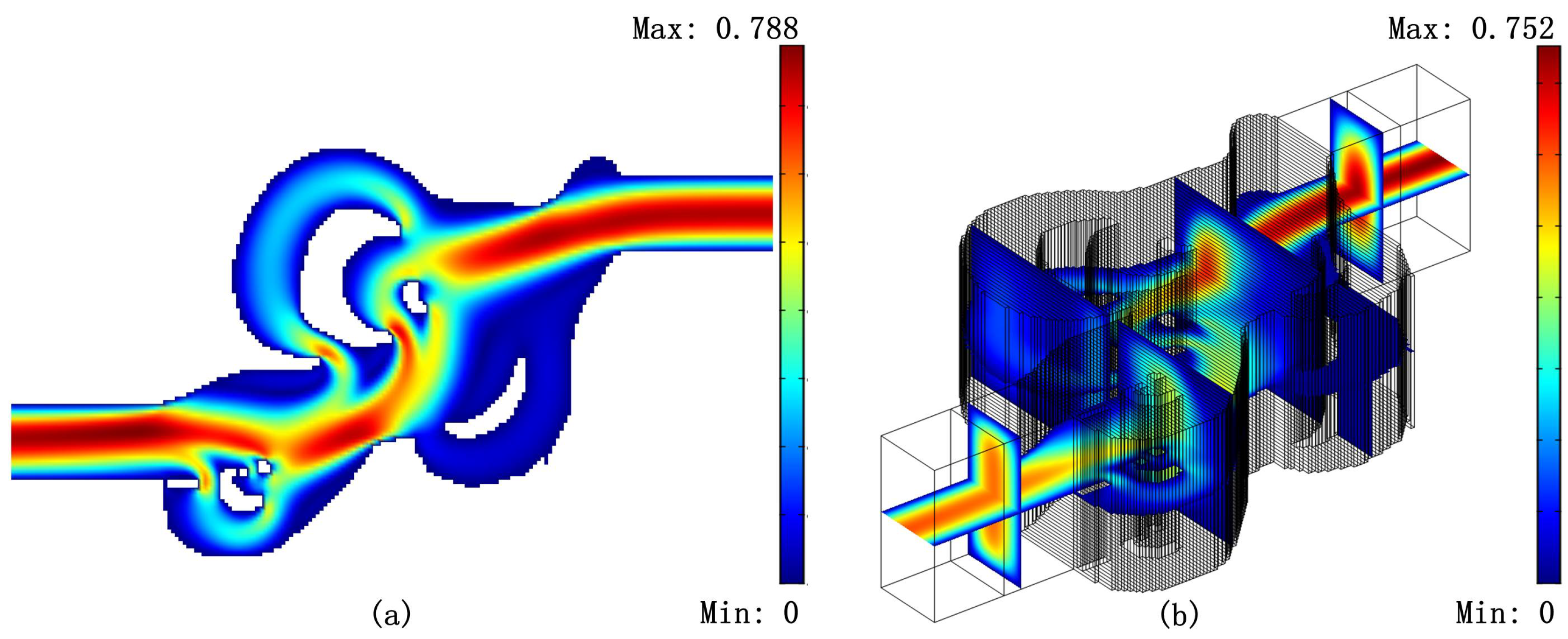
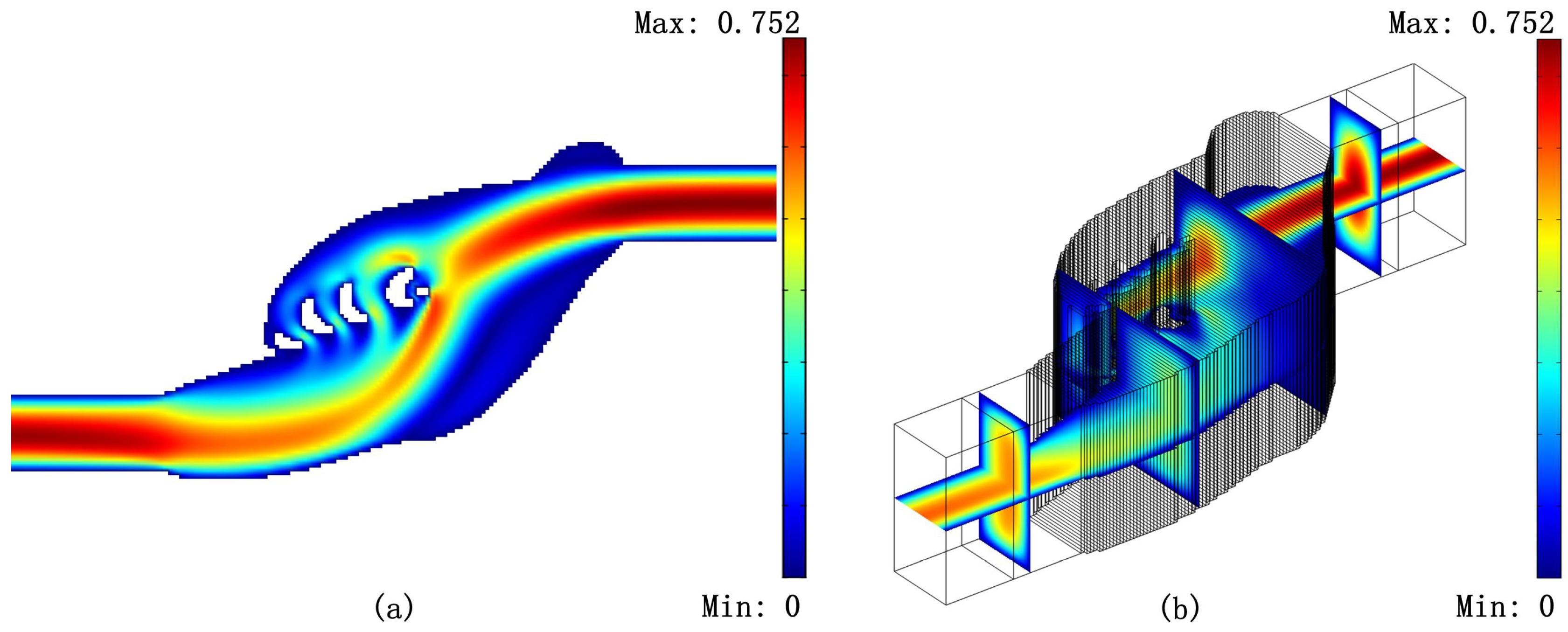
3.1. Tesla Valve
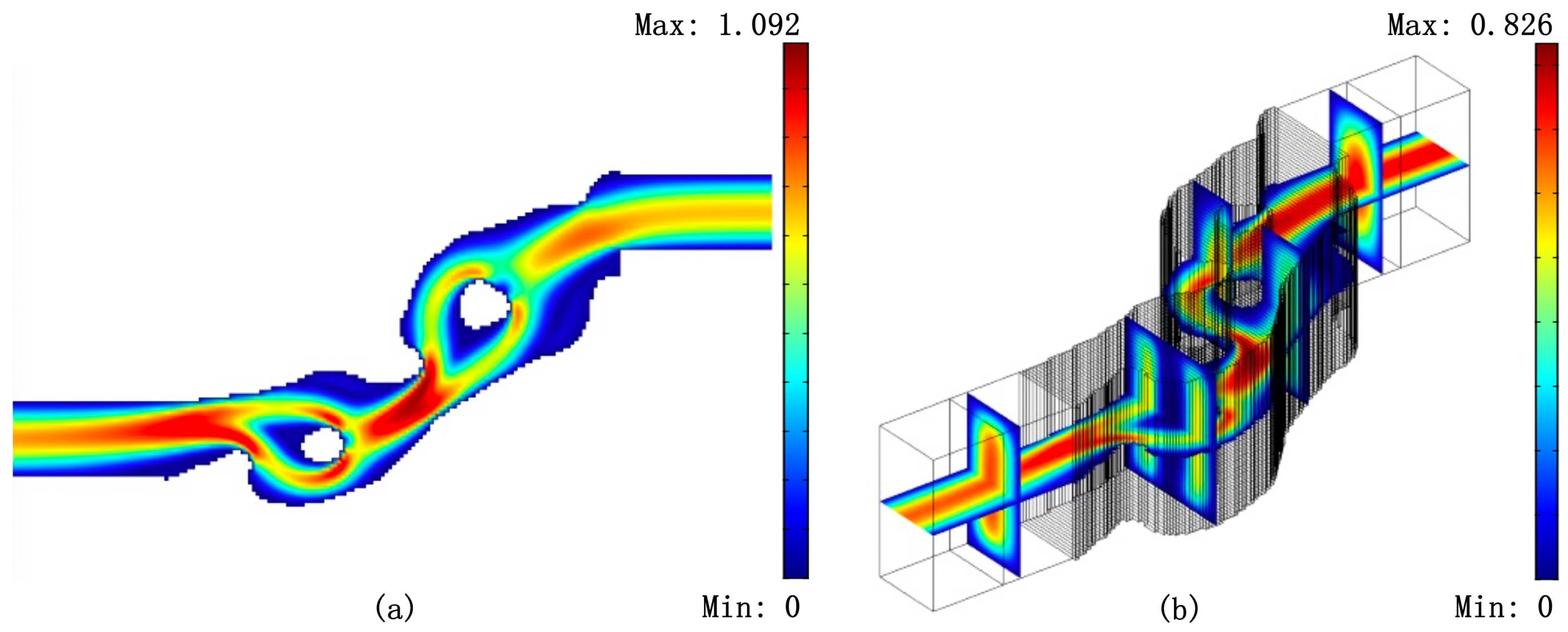
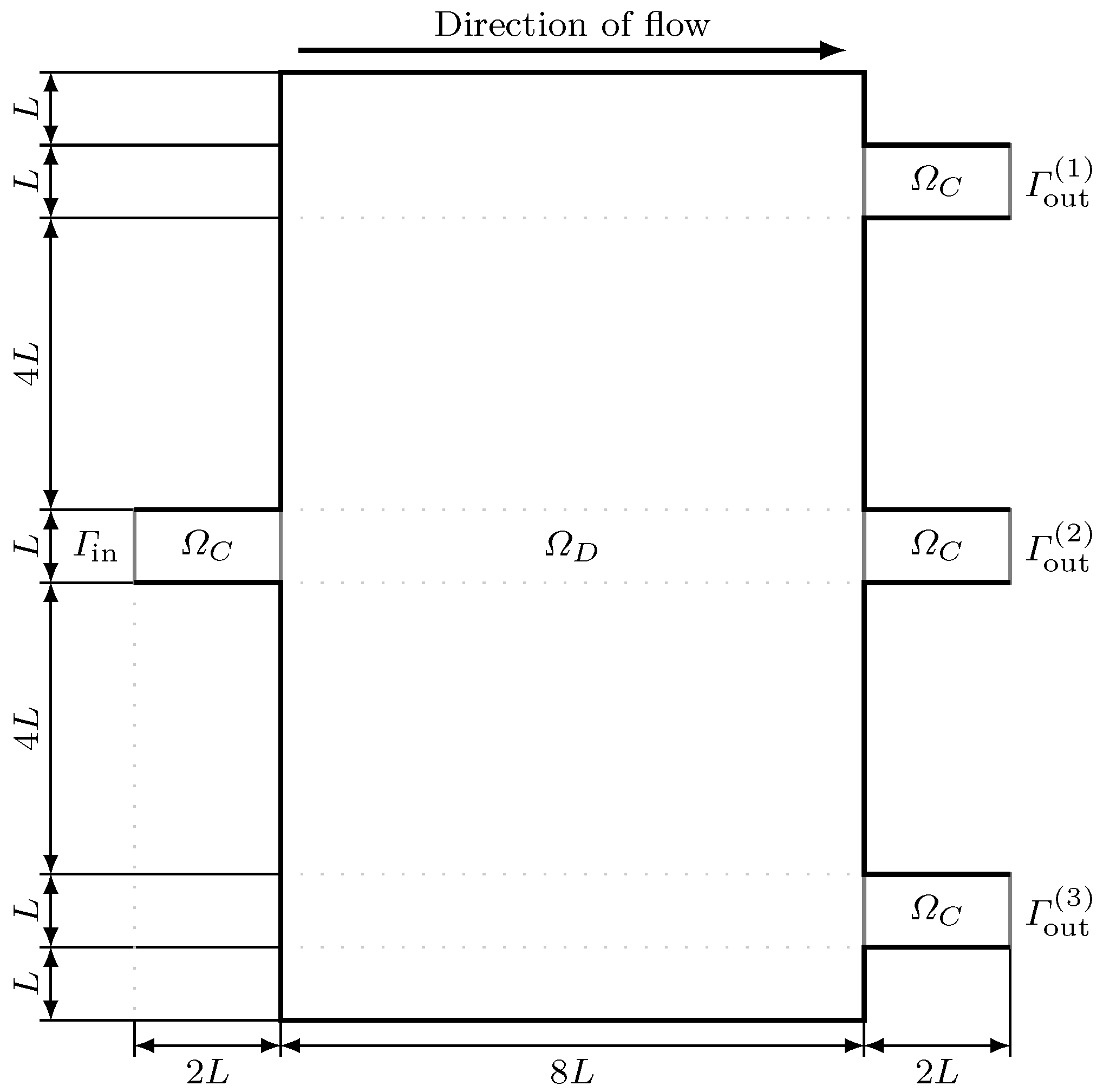
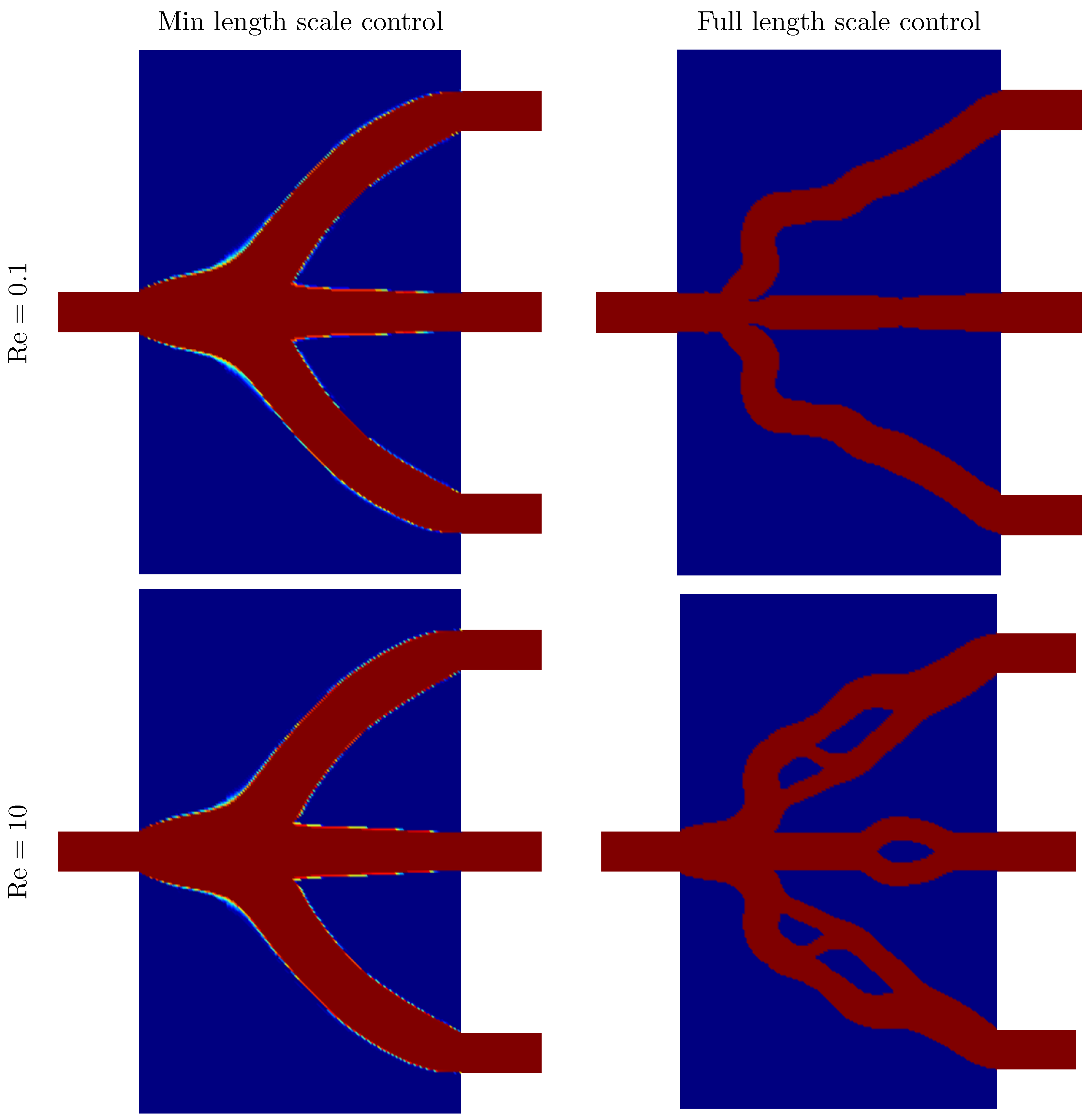
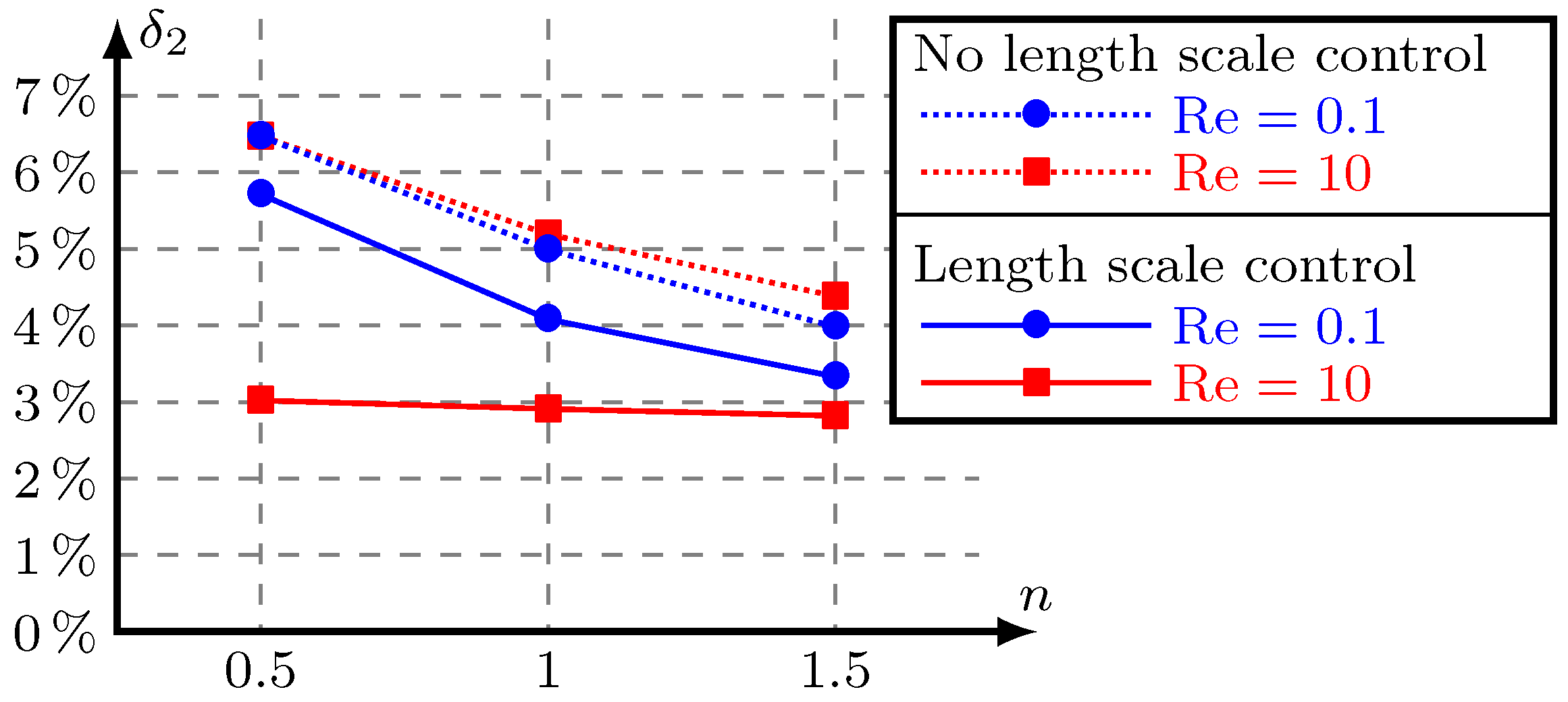
3.2. Microfluidic Splitters with Equivalent Outlet Flowrate
4. Discussion and Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Whitesides, G. The lab finally comes to the chip! Lab Chip 2014, 14, 3125–3126. [Google Scholar] [CrossRef] [PubMed]
- Laser, D.J.; Santiag, J.G. A review of micropumps. J. Micromechan. Microeng. 2004, 14, R35–R64. [Google Scholar] [CrossRef]
- Oh, K.W.; Ahn, C.H. A review of microvalves. J. Micromechan. Microeng. 2006, 16, R13–R39. [Google Scholar] [CrossRef]
- Cai, G.; Xue, L.; Zhang, H.; Lin, J. A Review on Micromixers. Micromachines 2017, 8, 274. [Google Scholar] [CrossRef] [PubMed]
- Feng, X.; Ren, Y.; Hou, L.; Tao, Y.; Jiang, T.; Li, W.; Jiang, H. Tri-fluid mixing in a microchannel for nanoparticle synthesis. Lab Chip 2019, 19. [Google Scholar] [CrossRef]
- Borrvall, T.; Petersson, J. Topology optimization of fluids in Stokes flow. Int. J. Num. Methods Fluids 2003, 41, 77–107. [Google Scholar] [CrossRef]
- Gersborg–Hansen, A.; Sigmund, O.; Haber, R.B. Topology optimization of channel flow problems. Struct. Multidiscip. Optim. 2005, 30, 181–192. [Google Scholar] [CrossRef]
- Olesen, L.H.; Okkels, F.; Bruus, H. A high-level programming-language implementation of topology optimization applied to steady-state Navier—Stokes flow. Int. J. Num. Methods Eng. 2006, 65, 975–1001. [Google Scholar] [CrossRef] [Green Version]
- Zhou, T.; Liu, T.; Deng, Y.; Chen, L.; Qian, S.; Liu, Z. Design of microfluidic channel networks with specified output flow rates using the CFD-based optimization method. Microfluid. Nanofluid. 2017, 21. [Google Scholar] [CrossRef]
- Deng, Y.; Liu, Z.; Zhang, P.; Liu, Y.; Wu, Y. Topology optimization of unsteady incompressible Navier—Stokes flows. J. Comput. Phys. 2011, 230, 6688–6708. [Google Scholar] [CrossRef]
- Alexandersen, J.; WAage, N.; Andreasen, C.S.; Sigmund, O. Topology optimisation for natural convection problems. Int. J. Num. Methods Fluids 2014, 76, 699–721. [Google Scholar] [CrossRef] [Green Version]
- Deng, Y.; Wu, Y.; Xuan, M.; Korvink, J.G.; Liu, Z. Dynamic Optimization of Valveless Micropump. In Solid-State Sensors, Proceedings of the Actuators and Microsystems Conference, Beijing, China, 5–9 June 2011; IEEE: Piscataway, NJ, USA, 2011. [Google Scholar] [CrossRef]
- Deng, Y.; Liu, Z.; Zhang, P.; Wu, Y.; Korvink, J.G. Optimization of no-moving part fluidic resistance microvalves with low Reynolds number. In Proceedings of the 2010 IEEE 23rd International Conference on Micro Electro Mechanical Systems (MEMS), Hong Kong, China, 24–28 January 2010. [Google Scholar] [CrossRef]
- Lin, S.; Zhao, L.; Guest, J.K.; Weihs, T.P.; Liu, Z. Topology Optimization of Fixed-Geometry Fluid Diodes. J. Mech. Des. 2015, 13, 081402. [Google Scholar] [CrossRef]
- Guo, Y.; Xu, Y.; Deng, Y.; Liu, Z. Topology optimization of passive micromixers based on Lagrangian mapping method. Micromachines 2018, 9, 137. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Zeng, S.; Kanargi, B.; Lee, P.S. Experimental and numerical investigation of a mini channel forced air heat sink designed by topology optimization. Int. J. Heat Mass Transf. 2018, 121, 663–679. [Google Scholar] [CrossRef]
- Haertel, J.; Engelbrecht, K.; Lazarov, B.; Sigmund, O. Topology optimization of a pseudo 3D thermofluid heat sink model. Int. J. Heat Mass Transf. 2018, 121, 1073–1088. [Google Scholar] [CrossRef] [Green Version]
- Kobayashi, H.; Yaji, K.; Yamasaki, S.; Fujita, K. Freeform winglet design of fin-and-tube heat exchangers guided by topology optimization. Appl. Therm. Eng. 2019. [Google Scholar] [CrossRef]
- Yan, S.; Wang, F.; Hong, J.; Sigmund, O. Topology optimization of microchannel heat sink using a two-layer model. Int. J. Heat Mass Transf. 2019, 143, 118462. [Google Scholar] [CrossRef]
- Zhao, X.; Zhou, M.; Sigmund, O.; Andreasen, C.S. A “poor man’s approach” to topology optimization of cooling channels based on a Darcy flow model. Int. J. Heat Mass Transf. 2018, 116, 1108–1123. [Google Scholar] [CrossRef] [Green Version]
- Oh, K.W.; Lee, K.; Ahn, B.; Furlani, E.P. Design of pressure-driven microfluidic networks using electric circuit analogy. Lab Chip 2012, 12, 515–545. [Google Scholar] [CrossRef]
- Lazarov, B.S.; Wang, F. Maximum length scale in density based topology optimization. Comput. Methods Appl. Mech. Eng. 2017, 318, 826–844. [Google Scholar] [CrossRef] [Green Version]
- Wang, F.; Lazarov, B.S. On projection methods, convergence and robust formulations in topology optimization. Struct. Multidisc. Optim. 2011, 43, 767–784. [Google Scholar] [CrossRef]
- Hägg, L.; Wadbro, E. Nonlinear filters in topology optimization: Existence of solutions and efficient implementation for minimum compliance problems. Struct. Multidiscip. Optim. 2017, 55, 1017–1028. [Google Scholar] [CrossRef] [Green Version]
- Cornish, R.J. Flow in a pipe of rectangular cross-section. Proc. R. Soc. Lond. Ser. A 1928, 120, 691–700. [Google Scholar]
- Svanberg, K. The method of moving asymptotes—A new method for structural optimization. Int. J. Num. Methods Eng. 1987, 24, 359–373. [Google Scholar] [CrossRef]
- Heijmans, H. Mathematical morphology: A modern approach in image processing based on algebra and geometry. SIAM Rev. 1995, 37, 1–36. [Google Scholar] [CrossRef] [Green Version]
- Sigmund, O. Morphology-based black and white filters for topology optimization. Struct. Multidiscip. Optim. 2007, 33, 401–424. [Google Scholar] [CrossRef] [Green Version]
- Svanberg, K.; Svärd, H. Density filters for topology optimization based on the Pythagorean means. Struct. Multidiscip. Optim. 2013, 48, 859–875. [Google Scholar] [CrossRef]
- Wadbro, E.; Hägg, L. On quasi-arithmetic mean based filters and their fast evaluation for large-scale topology optimization. Struct. Multidiscip. Optim. 2015, 52, 879–888. [Google Scholar] [CrossRef]
- Schevenels, M.; Sigmund, O. On the implementation and effectiveness of morphological close—Open and open— Close filters for topology optimization. Struct. Multidiscip. Optim. 2016, 54, 15–21. [Google Scholar] [CrossRef] [Green Version]
- Sato, Y.; Yaji, K.; Izui, K.; Yamada, T.; Nishiwaki, S. Topology optimization of a no-moving-part valve incorporating Pareto frontier exploration. Struct. Multidiscip. Optim. 2017. [Google Scholar] [CrossRef]
- Liu, Z.; Deng, Y.; Lin, S.; Xuan, M. Optimization of micro Venturi diode in steady flow at low Reynolds number. Eng. Optim. 2012, 44, 1389–1404. [Google Scholar] [CrossRef]












© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Guo, Y.; Pan, H.; Wadbro, E.; Liu, Z. Design Applicable 3D Microfluidic Functional Units Using 2D Topology Optimization with Length Scale Constraints. Micromachines 2020, 11, 613. https://doi.org/10.3390/mi11060613
Guo Y, Pan H, Wadbro E, Liu Z. Design Applicable 3D Microfluidic Functional Units Using 2D Topology Optimization with Length Scale Constraints. Micromachines. 2020; 11(6):613. https://doi.org/10.3390/mi11060613
Chicago/Turabian StyleGuo, Yuchen, Hui Pan, Eddie Wadbro, and Zhenyu Liu. 2020. "Design Applicable 3D Microfluidic Functional Units Using 2D Topology Optimization with Length Scale Constraints" Micromachines 11, no. 6: 613. https://doi.org/10.3390/mi11060613
APA StyleGuo, Y., Pan, H., Wadbro, E., & Liu, Z. (2020). Design Applicable 3D Microfluidic Functional Units Using 2D Topology Optimization with Length Scale Constraints. Micromachines, 11(6), 613. https://doi.org/10.3390/mi11060613