Bending Setups for Reliability Investigation of Flexible Electronics


Abstract
:1. Introduction
2. Substrates for Flexible Electronics
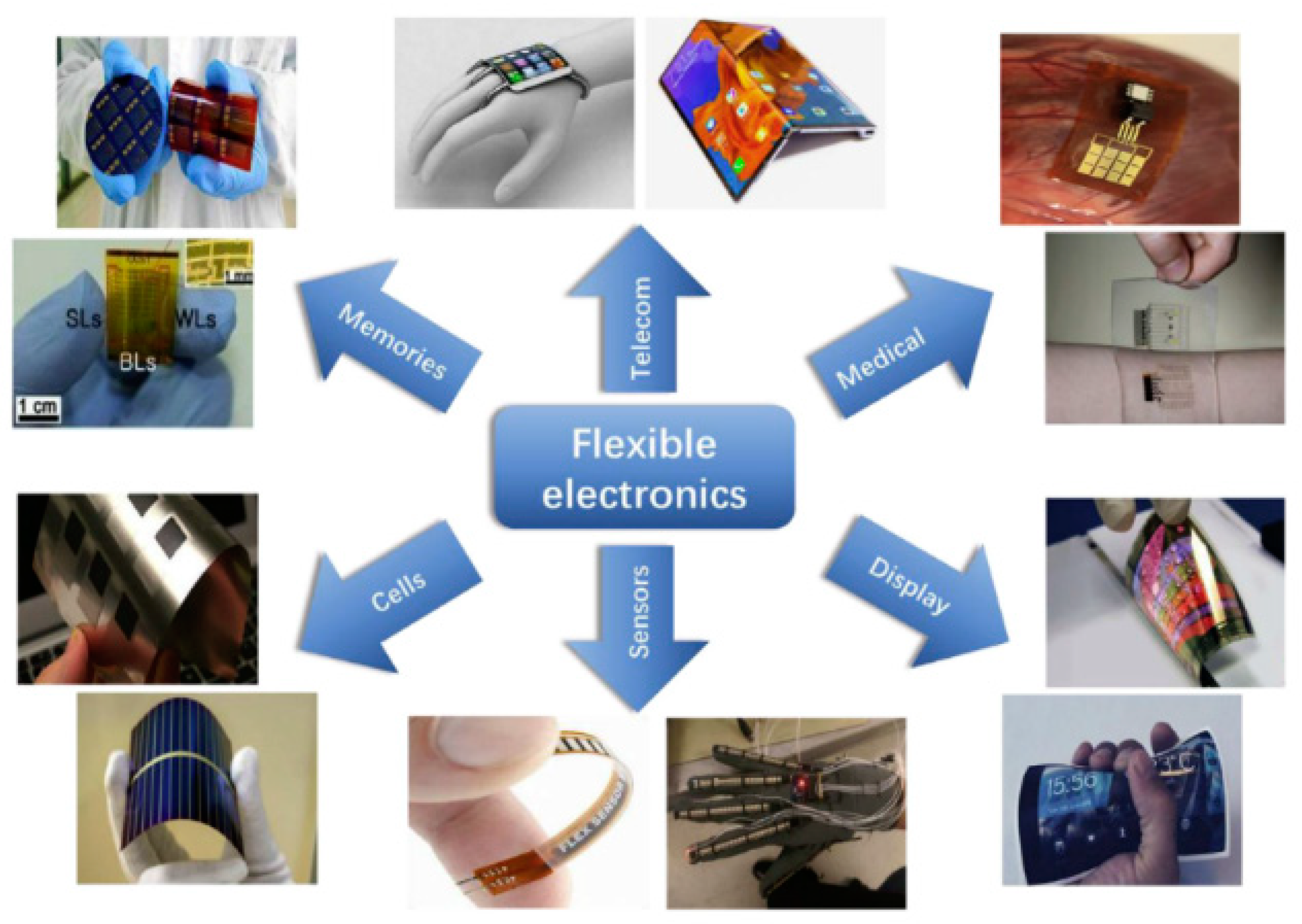
3. Application of Flexible Electronics
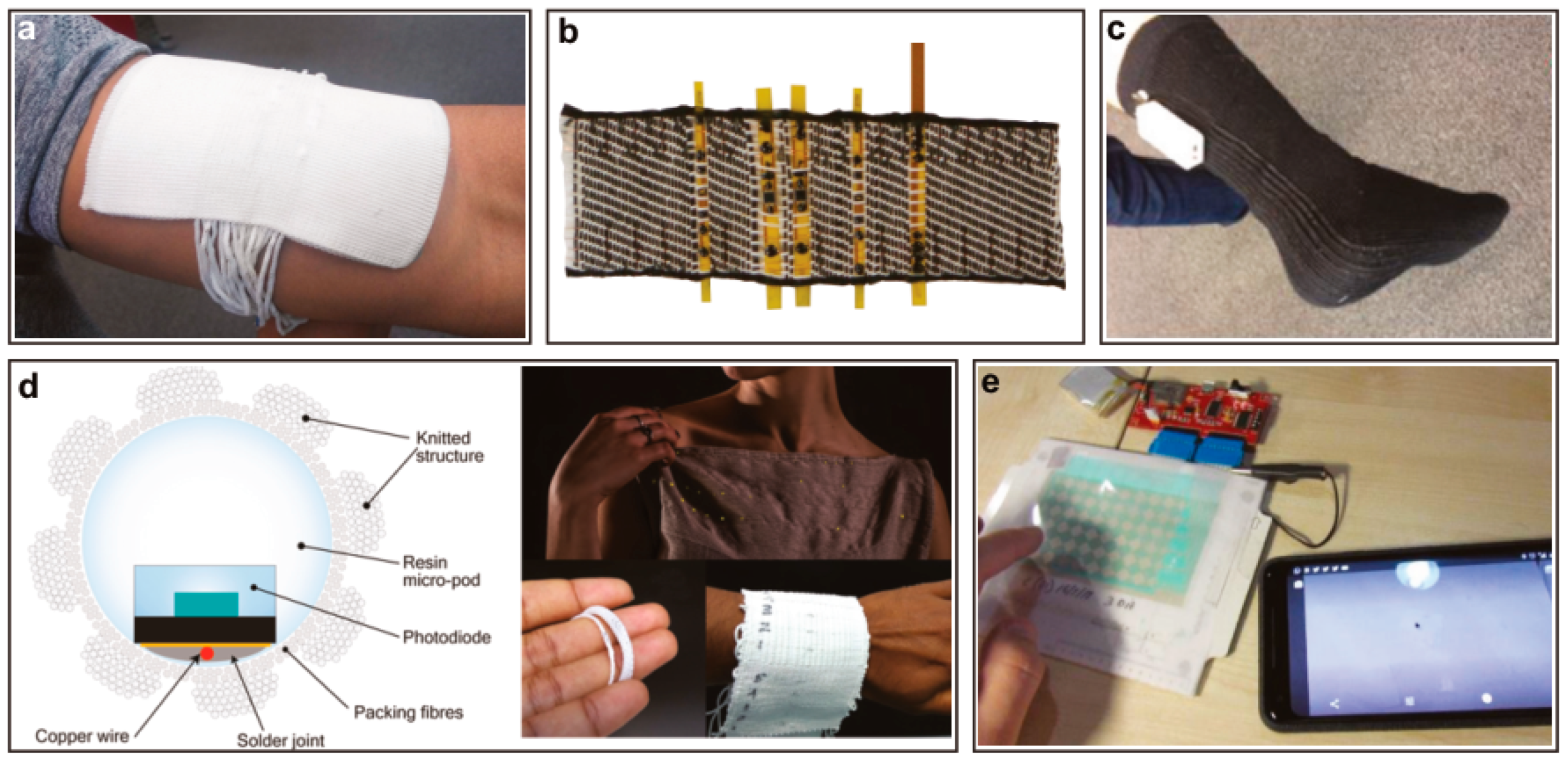
3.1. Wearables and E-Textiles
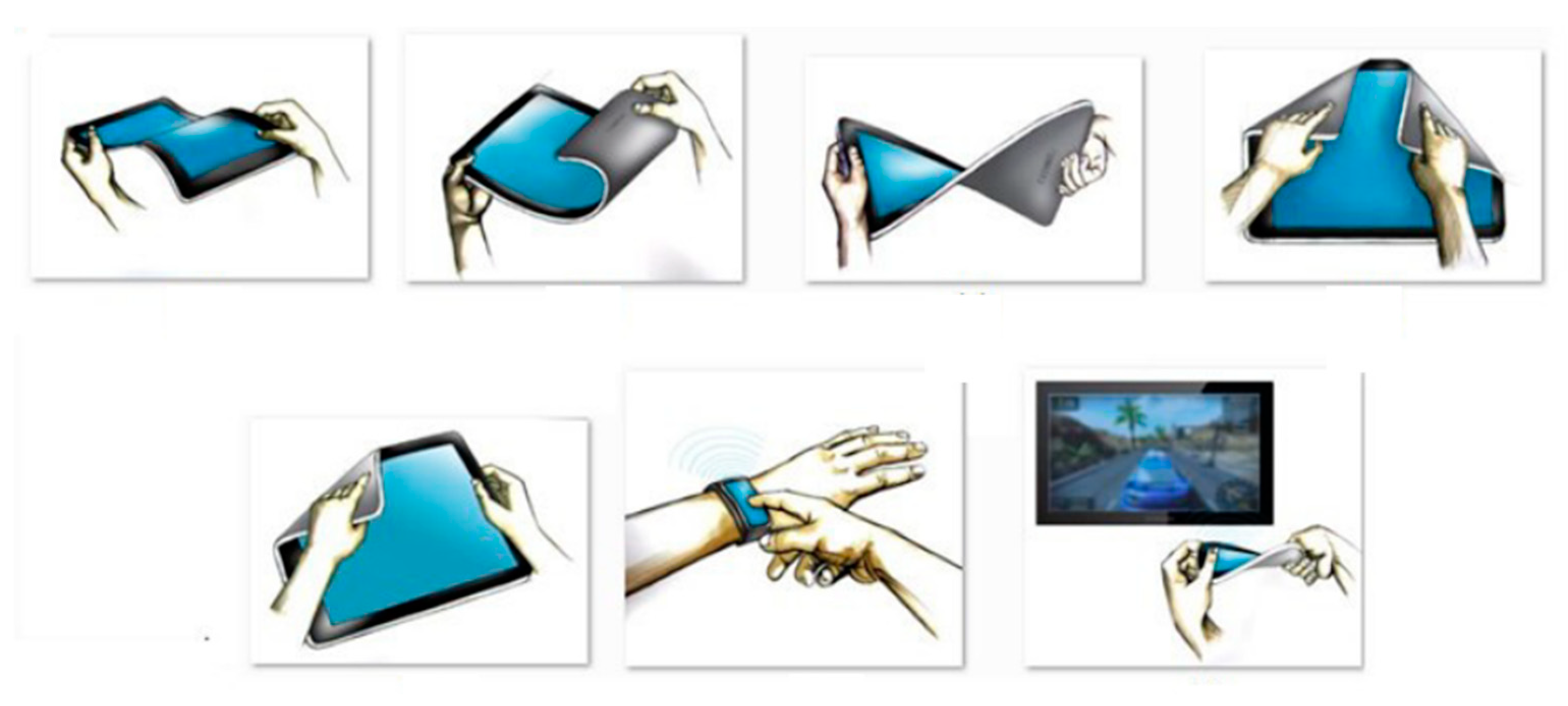
3.2. Flexible Displays
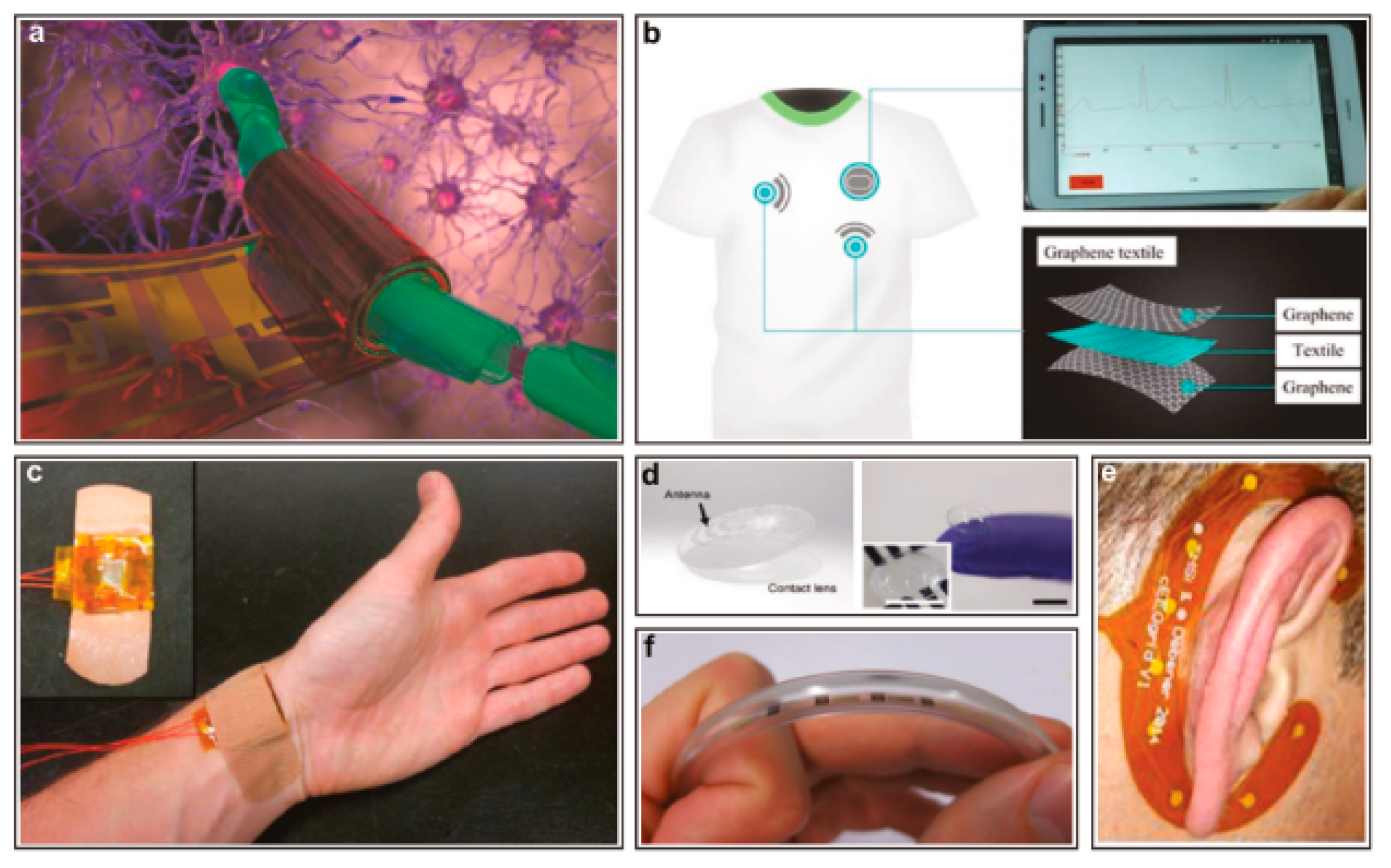
3.3. Diagnostics and Healthcare
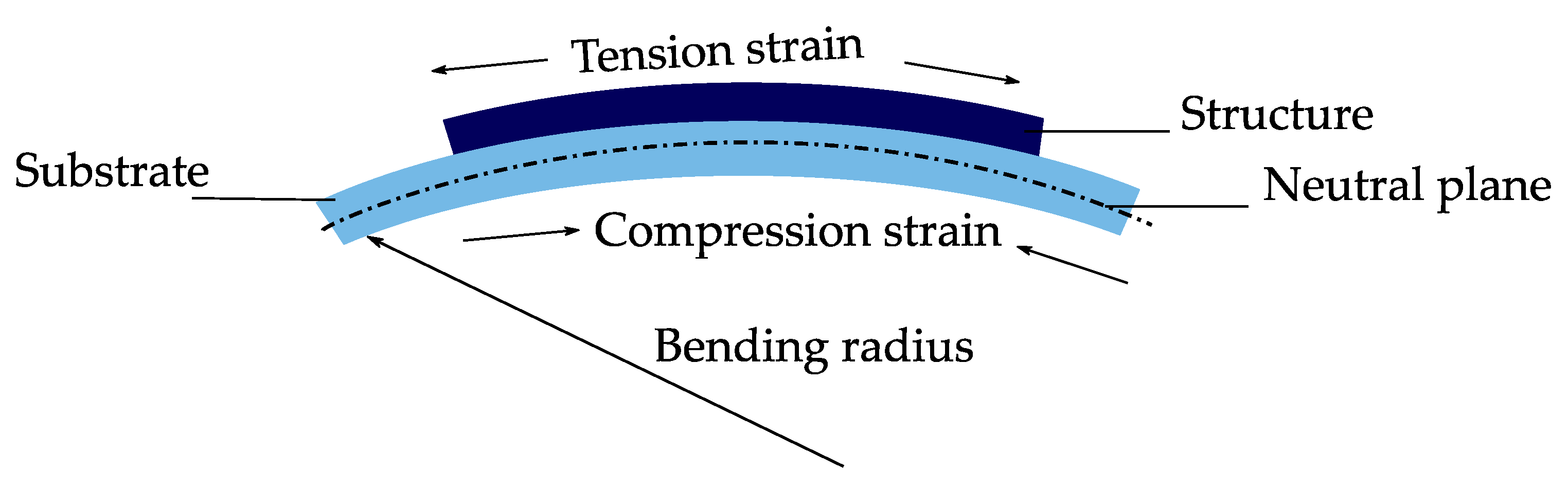
4. Mechanics of Bending
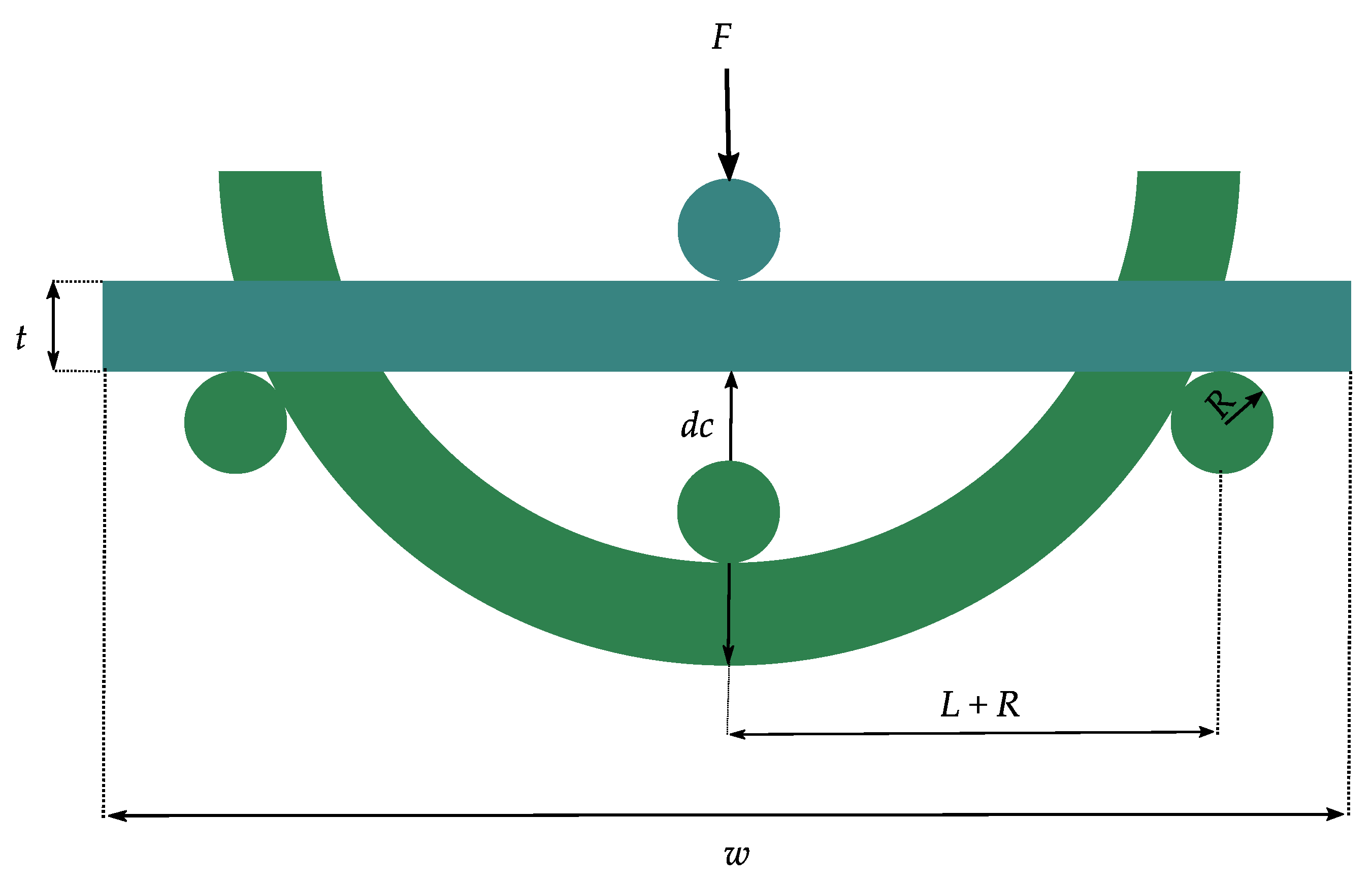
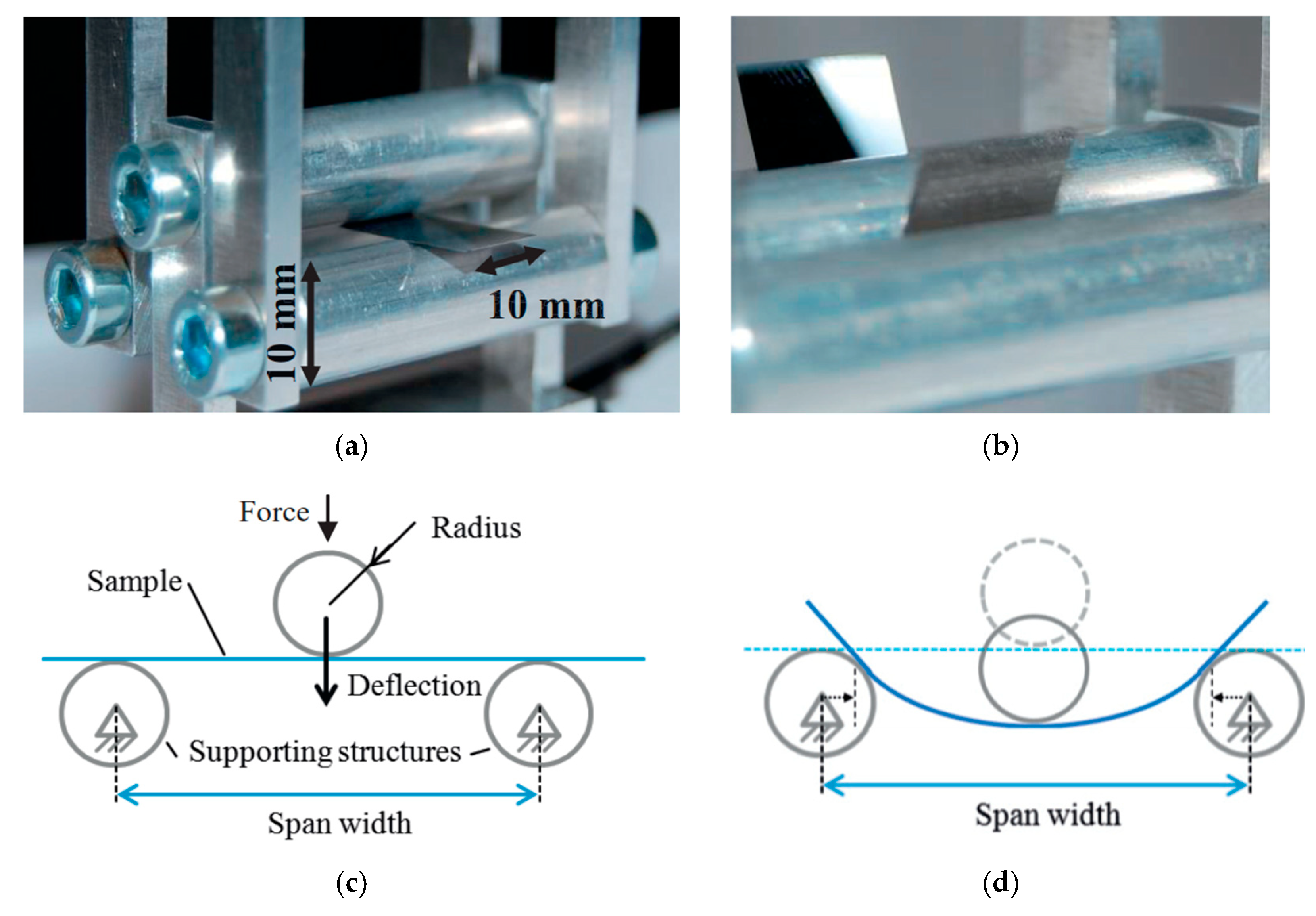
4.1. Three-Point Bending
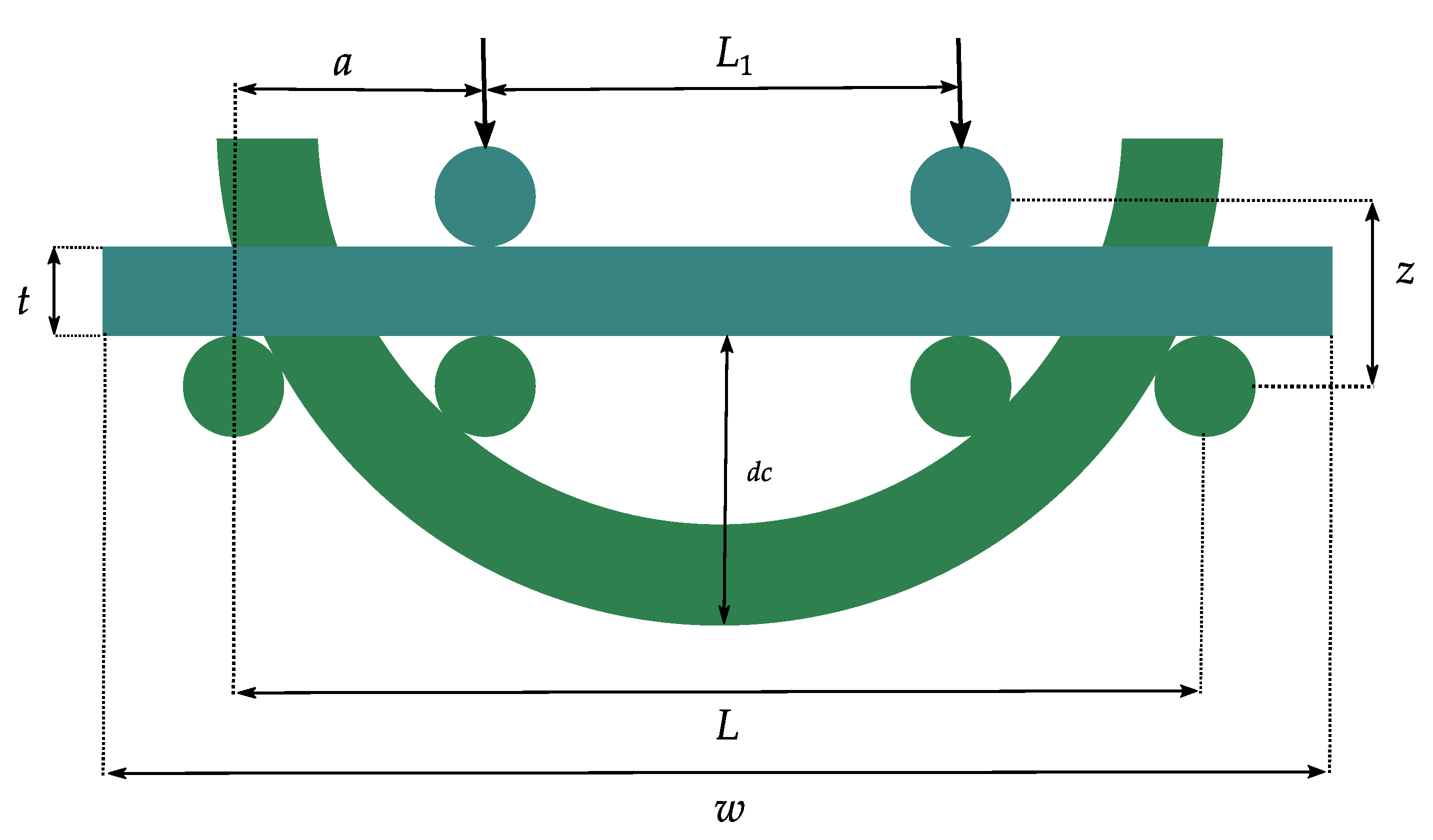
4.2. Four-Point Bendings
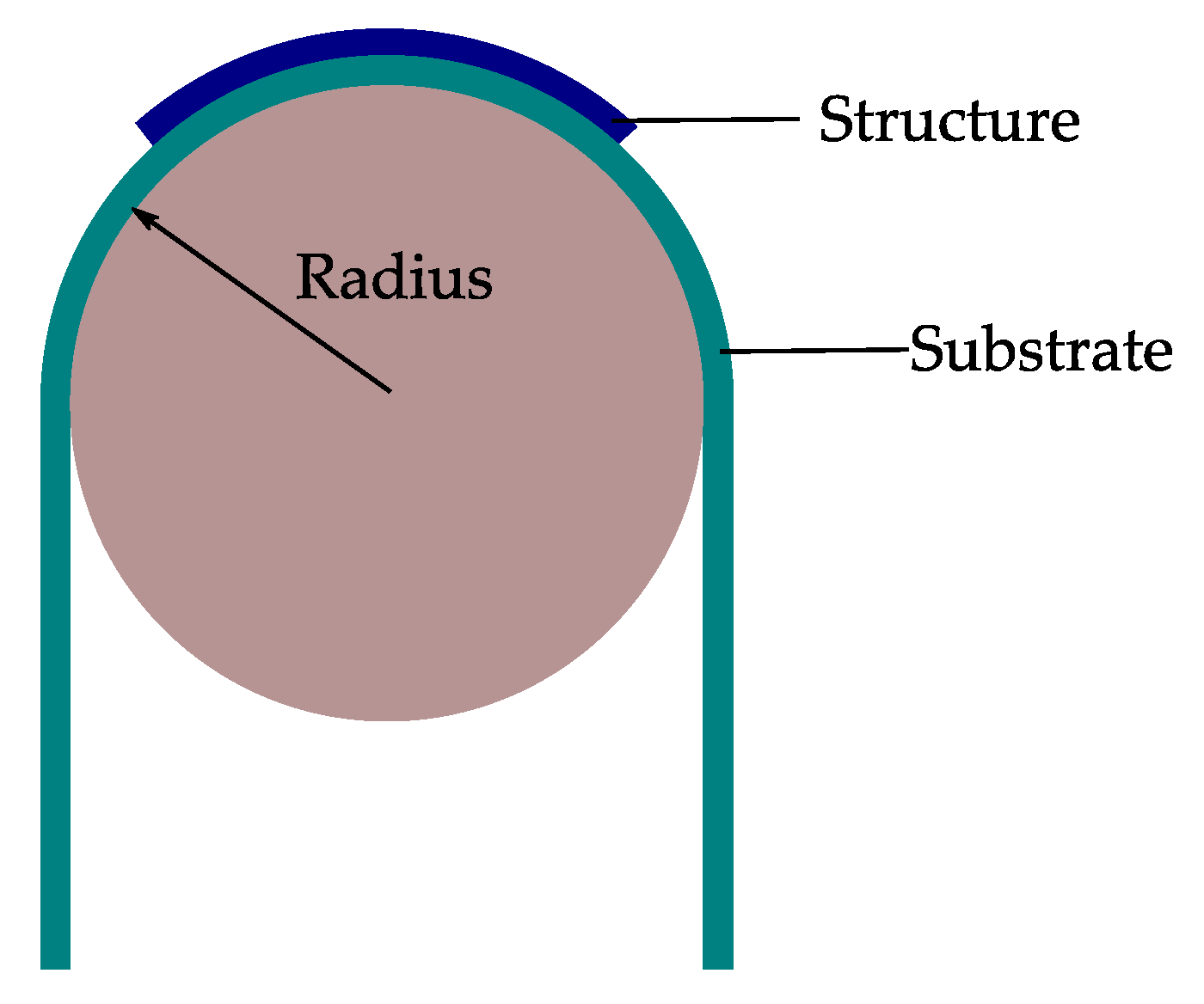
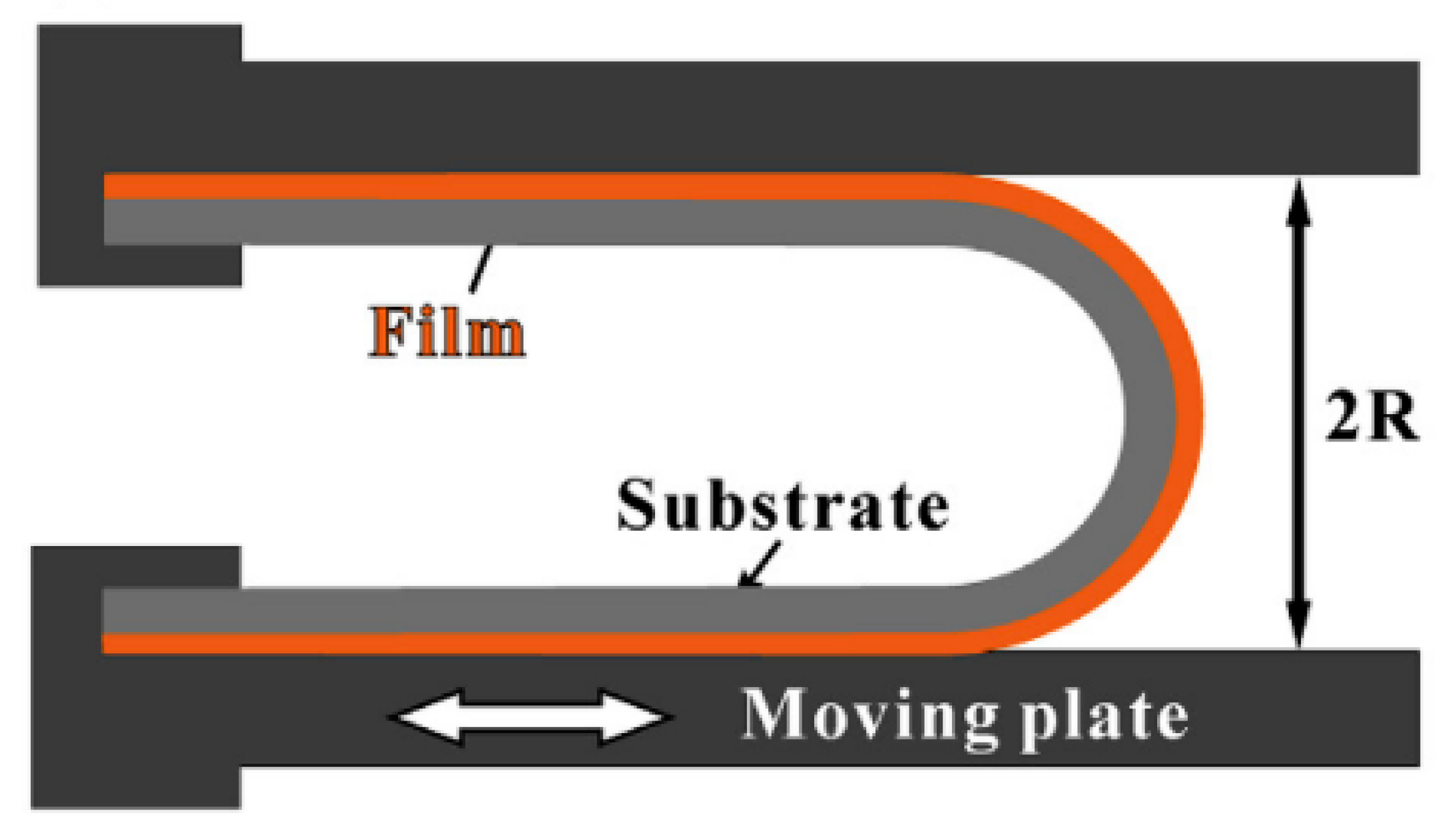
4.3. Push and Roll to Flex
5. Bending Machines
5.1. Static versus Dynamic Bending
5.2. Three-Point Bending versus Four-Point Bending
5.3. Push to Flex versus Roll to Flex Bending
6. Discussion
6.1. Three- and Four-Point Bending
6.2. Push to Flex Bending
6.3. Roll to Flex Bending
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Bedjaoui, M.; Martin, S.; Salot, R. Interconnection of Flexible Lithium Thin Film Batteries for Systems-in-Foil. In Proceedings of the 2016 IEEE 66th Electronic Components and Technology Conference (ECTC), Las Vegas, NV, USA, 31 May–3 June 2016; pp. 2082–2088. [Google Scholar]
- Logothetidis, S. Handbook of Flexible Organic Electronics; Woodhead Puplishing, Elsevier: Amesterdam, The Netherlands, 2015; ISBN 9781782420354. [Google Scholar]
- Gupta, S.; Navaraj, W.T.; Lorenzelli, L.; Dahiya, R. Ultra-thin chips for high-performance flexible electronics. NPJ Flex. Electron. 2018, 2, 8. [Google Scholar] [CrossRef]
- Nathan, B.A.; Ieee, F.; Ahnood, A.; Cole, M.T.; Lee, S.; Ieee, M.; Suzuki, Y.; Hiralal, P.; Bonaccorso, F.; Hasan, T.; et al. Flexible Electronics: The Next Ubiquitous Platform. Proc. IEEE 2012, 100, 1486–1517. [Google Scholar] [CrossRef]
- Tong, G.; Jia, Z.; Chang, J. Flexible Hybrid Electronics: Review and Challenges. Proc. IEEE Int. Symp. Circuits Syst. 2018, 2018, 1–5. [Google Scholar]
- Li, H.U.; Jackson, T.N. Flexibility testing strategies and apparatus for flexible electronics. IEEE Trans. Electron Devices 2016, 63, 1934–1939. [Google Scholar] [CrossRef]
- GrandViewResearch. Flexible Electronics Market by Components (Display, Battery, Sensors, Memory), by Application (Consumer Electronics, Automotive, Healthcare, Industrial) And Segment Forecast to 2024. 2016. Available online: https://www.grandviewresearch.com/industry-analysis/flexible-electronics-market (accessed on 30 April 2020).
- Dyson, M.; Ghaffarzadeh, K. Flexible Hybrid Electronics 2020–2030: Applications, Challenges, Innovations and Forecasts; IDTechEx: Cambridge, UK, 2020. [Google Scholar]
- Someya, T.; Sekitani, T.; Iba, S.; Kato, Y.; Kawaguchi, H.; Sakurai, T. A large-area, flexible pressure sensor matrix with organic field-effect transistors for artificial skin applications. Proc. Natl. Acad. Sci. USA 2004, 101, 9966–9970. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Kim, J.H.; Lee, T.I.; Shin, J.W.; Kim, T.S.; Paik, K.W. Bending Properties of Anisotropic Conductive Films Assembled Chip-in-Flex Packages for Wearable Electronics Applications. IEEE Trans. Compon. Packag. Manuf. Technol. 2016, 6, 208–215. [Google Scholar] [CrossRef]
- Gao, W.; Zhu, Y.; Wang, Y.; Yuan, G.; Liu, J.M. A review of flexible perovskite oxide ferroelectric films and their application. J. Mater. 2020, 6, 1–16. [Google Scholar] [CrossRef]
- Kröninger, W.J.; Ossowski, L. Successful processing of thinned silicon chips thresholds and limits in mechanical properties. In Proceedings of the 2004 IEEE/SEMI Advanced Semiconductor Manufacturing Conference and Workshop (IEEE Cat. No. 04CH37530), Boston, MA, USA, 4–6 May 2004; pp. 232–236. [Google Scholar]
- Van Den Ende, D.A.; Van De Wiel, H.J.; Kusters, R.H.L.; Sridhar, A.; Schram, J.F.M.; Cauwe, M.; Van Den Brand, J. Mechanical and electrical properties of ultra-thin chips and flexible electronics assemblies during bending. Microelectron. Reliab. 2014, 54, 2860–2870. [Google Scholar] [CrossRef]
- Harendt, C.; Kostelnik, J.; Kugler, A.; Lorenz, E.; Saller, S.; Schreivogel, A.; Yu, Z.; Burghartz, J.N. Hybrid Systems in Foil (HySiF) exploiting ultra-thin flexible chips. Solid State Electron. 2015, 113, 101–108. [Google Scholar] [CrossRef]
- Rogers, J.A.; Someya, T.; Huang, Y. Materials and mechanics for stretchable electronics. Science (80-) 2010, 327, 1603–1607. [Google Scholar] [CrossRef] [Green Version]
- Kunkel, G.; Debski, T.; Burkard, H.; Link, J.; Petersen, A.E.; Christiaens, W.; Vanfleteren, J. Ultra-flexible and ultra-thin embedded medical devices on large area panels. In Proceedings of the 3rd Electronics System Integration Technology Conference ESTC, Berlin, Germany, 13–16 September 2010. [Google Scholar] [CrossRef]
- Servati, A.; Zou, L.; Jane Wang, Z.; Ko, F.; Servati, P. Novel flexible wearable sensor materials and signal processing for vital sign and human activity monitoring. Sensors 2017, 17, 1622. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Loher, T.; Seckel, M.; Pahl, B.; Böttcher, L.; Ostmann, A.; Reichl, H. Highly integrated flexible electronic circuits and modules. In Proceedings of the 2008 3rd International Microsystems, Packagaging, Assembly and Circuits Technology Conference, IMPACT 2008, Tabie, Taiwen, 22–24 October 2008; pp. 86–89. [Google Scholar]
- Harris, K.D.; Elias, A.L.; Chung, H.J. Flexible electronics under strain: A review of mechanical characterization and durability enhancement strategies. J. Mater. Sci. 2016, 51, 2771–2805. [Google Scholar] [CrossRef]
- Dahiya, R.S.; Gennaro, S. Bendable ultra-thin chips on flexible foils. IEEE Sens. J. 2013, 13, 4030–4037. [Google Scholar] [CrossRef]
- Su, Y.; Liu, Z.; Kim, S.; Wu, J.; Huang, Y.; Rogers, J.A. Mechanics of stretchable electronics with high fill factors. Int. J. Solids Struct. 2012, 49, 3416–3421. [Google Scholar] [CrossRef] [Green Version]
- Hamasha, M.M.; Alzoubi, K.; Switzer, J.C.; Lu, S.; Poliks, M.D.; Westgate, C.R. Reliability of sputtered aluminum thin film on flexible substrate under high cyclic bending fatigue conditions. IEEE Trans. Compon. Packag. Manuf. Technol. 2012, 2, 2007–2016. [Google Scholar] [CrossRef]
- Janek, F.; Saller, E.; Müller, E.; Meißner, T.; Weser, S.; Barth, M.; Eberhardt, W.; Zimmermann, A. Feasibility study of an automated assembly process for ultrathin chips. Micromachines 2020, 11, 654. [Google Scholar] [CrossRef] [PubMed]
- Akinwande, D.; Petrone, N.; Hone, J. Two-dimensional flexible nanoelectronics. Nat. Commun. 2014, 5, 5678. [Google Scholar] [CrossRef]
- Palavesam, N.; Landesberger, C.; Kutter, C.; Bock, K. Finite element analysis of uniaxial bending of ultra-thin silicon dies embedded in flexible foil substrates. In Proceedings of the 2015 11th Conference on Ph.D. Research Microelectronics and Electronics (PRIME 2015), Glasgow, UK, 29 June–2 July 2015; pp. 137–140. [Google Scholar]
- Burghartz, J.N. Ultra-Thin Chip Technology and Applications; Burghartz, J., Ed.; Springer: New York, NY, USA, 2011; Volume 53, ISBN 978-1-4419-7275-0. [Google Scholar]
- Schoenfelder, S.; Ebert, M.; Landesberger, C.; Bock, K.; Bagdahn, J. Investigations of the influence of dicing techniques on the strength properties of thin silicon. Microelectron. Reliab. 2007, 47, 168–178. [Google Scholar] [CrossRef]
- Endler, S.; Angelopoulos, E.A.; Harendt, C.; Hoang, T.; Rempp, H.; Burghartz, J.N. Bestimmung der mechanischen Stabilität ultradünner Chips. In Mikrosystemtechnik Kongress 2011; VDE Verlag GmbH: Berling, Germany, 2011; pp. 737–740. [Google Scholar]
- Palavesam, N.; Landesberger, C.; Bock, K. Investigations of the fracture strength of thin silicon dies embedded in flexible foil substrates. In Proceedings of the 2014 IEEE 20th International Symposium for Design and Technology in Electronic Packaging (SIITME), Bucharest, Romania, 23–26 October 2014; pp. 267–271. [Google Scholar]
- Endler, S.; Hoang, T.; Angelopoulos, E.A.; Rempp, H.; Harendt, C.; Burghart, J.N. Mechanical characterisation of ultra-thin chips. In Proceedings of the IEEE—2011 Semiconductor Conference Dresden: Technology, Design, Packaging, Simulation and Test, SCD 2011—International Conference, Workshop and Table-Top Exhibition, Dresden, Germany, 27–28 September 2011; pp. 3–6. [Google Scholar]
- Al Ahmar, J.; Wiss, E.; Wiese, S. Four-point-bending experiments on multilayer ceramic capacitors: Microstructural details on crack initiation and propagation. In Proceedings of the 2018 19th International Conference on Thermal, Mechanical and Multi-Physics Simulation and Experiments in Microelectronics and Microsystems (EuroSimE), Toulouse, France, 15–18 April 2018; pp. 1–6. [Google Scholar]
- Costa, J.C.; Spina, F.; Lugoda, P.; Garcia-Garcia, L.; Roggen, D.; Münzenrieder, N. Flexible Sensors—From Materials to Applications. Technologies 2019, 7, 35. [Google Scholar] [CrossRef] [Green Version]
- Mark, J.E. (Ed.) Polymer Data Handbook; Oxford University Press: Oxford, UK, 1999; ISBN 9780195107890. [Google Scholar]
- Qin, Y.; Howlader, M.M.R.; Deen, M.J.; Haddara, Y.M.; Selvaganapathy, P.R. Polymer integration for packaging of implantable sensors. Sens. Actuators B Chem. 2014, 202, 758–778. [Google Scholar] [CrossRef]
- Rizvi, M.J.; Yin, C.Y.; Bailey, C. Modeling the effect of lead-free soldering on flexible substrates. In Proceedings of the 2006 International Conference on Electronic Materials and Packaging, Kowloon, China, 11–14 December 2006. [Google Scholar]
- Alavi, G.; Hassan, M.; Harendt, C.; Burghartz, J.N. Compensation of Stress-Induced Warpage for Polymer Embedding of Ultra-thin Chips Compensation of Stress–Induced Warpage for Polymer Embedding of Ultra–Thin Chips. In Proceedings of the Conference Paper: ICT.OPEN 2015, Amersfoort, The Netherlands, 24–25 March 2015. [Google Scholar]
- Sivapurapu, S.; Chen, R.; Mehta, C.; Zhou, Y.; Bellaredj, M.L.F.; Jia, X.; Kohl, P.; Huang, T.-C.; Sitaraman, S.K.; Swaminathan, M. Multi-physics Modeling & Characterization of Components on Flexible Substrates. IEEE Trans. Compon. Packag. Manuf. Technol. 2019, 9, 1. [Google Scholar]
- Palavesam, N.; Marin, S.; Hemmetzberger, D.; Landesberger, C.; Bock, K.; Kutter, C. Roll-to-roll processing of film substrates for hybrid integrated flexible electronics. Flex. Print. Electron. 2018, 3, 014002. [Google Scholar] [CrossRef]
- Lötters, J.; Olthuis, W.; Veltink, P.; Bergveld, P. The mechanical properties of the rubber elastic polymer polydimethylsiloxane for sensor applications. J. Micromechanics Microengineering 1997, 7, 145–147. [Google Scholar] [CrossRef]
- Stieglitz, T.; Beutel, H.; Schuettler, M.; Meyer, J. Micromachined, polyimide-based devices for flexible neural interfaces. Biomed. Microdevices 2000, 2, 283–294. [Google Scholar] [CrossRef]
- Li, Y.; Zheng, L.; Wang, X. Flexible and wearable healthcare sensors for visual reality health-monitoring. Virtual Real. Intell. Hardw. 2019, 1, 411–427. [Google Scholar] [CrossRef]
- Lumelsky, V.J.; Shur, M.S.; Wagner, S. Sensitive skin. IEEE Sens. J. 2001, 1, 41–51. [Google Scholar] [CrossRef]
- Mannsfeld, S.C.B.; Tee, B.C.-K.; Stoltenberg, R.M.; Chen, C.V.H.-H.; Barman, S.; Muir, B.V.O.; Sokolov, A.N.; Reese, C.; Bao, Z. Highly sensitive flexible pressure sensors with microstructured rubber dielectric layers. Nat. Mater. 2010, 9, 859–864. [Google Scholar] [CrossRef]
- Hayward, J. E-Textiles and Smart Clothing 2020–2030: Technologies, Markets and Players; IDTechEx: Cambridge, UK, 2020. [Google Scholar]
- Lugoda, P.; Hughes-Riley, T.; Morris, R.; Dias, T. A Wearable Textile Thermograph. Sensors 2018, 18, 2369. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Zysset, C.; Nasseri, N.; Büthe, L.; Münzenrieder, N.; Kinkeldei, T.; Petti, L.; Kleiser, S.; Salvatore, G.A.; Wolf, M.; Tröster, G. Textile integrated sensors and actuators for near-infrared spectroscopy. Opt. Express 2013, 21, 3213. [Google Scholar] [CrossRef] [Green Version]
- Hughes-Riley, T.; Lugoda, P.; Dias, T.; Trabi, C.; Morris, R. A Study of Thermistor Performance within a Textile Structure. Sensors 2017, 17, 1804. [Google Scholar] [CrossRef] [Green Version]
- Satharasinghe, A.; Hughes-Riley, T.; Dias, T. Photodiodes embedded within electronic textiles. Sci. Rep. 2018, 8, 16205. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Ferri, J.; Perez Fuster, C.; Llinares Llopis, R.; Moreno, J.; Garcia-Breijo, E. Integration of a 2D Touch Sensor with an Electroluminescent Display by Using a Screen-Printing Technology on Textile Substrate. Sensors 2018, 18, 3313. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- An, B.W.; Heo, S.; Ji, S.; Bien, F.; Park, J.U. Transparent and flexible fingerprint sensor array with multiplexed detection of tactile pressure and skin temperature. Nat. Commun. 2018, 9, 2458. [Google Scholar] [CrossRef]
- Lee, S.M.; Kwon, J.H.; Kwon, S.; Choi, K.C. A Review of Flexible OLEDs Toward Highly Durable Unusual Displays. IEEE Trans. Electron Devices 2017, 64, 1922–1931. [Google Scholar] [CrossRef]
- Forrest, S.R. The path to ubiquitous and low-cost organic electronic appliances on plastic. Nature 2004, 428, 911–918. [Google Scholar] [CrossRef]
- Gelinck, G.H.; Huitema, H.E.A.; Van Veenendaal, E.; Cantatore, E.; Schrijnemakers, L.; Van Der Putten, J.B.P.H.; Geuns, T.C.T.; Beenhakkers, M.; Giesbers, J.B.; Huisman, B.H.; et al. Flexible active-matrix displays and shift registers based on solution-processed organic transistors. Nat. Mater. 2004, 3, 106–110. [Google Scholar] [CrossRef]
- Nagaraju, S. Shapers: Capturing free form shapes for bendable device interactions. Procedia Comput. Sci. 2014, 39, 158–161. [Google Scholar] [CrossRef] [Green Version]
- Im, H.G.; Jung, S.H.; Jin, J.; Lee, D.; Lee, J.; Lee, D.; Lee, J.Y.; Kim, I.D.; Bae, B.S. Flexible transparent conducting hybrid film using a surface-embedded copper nanowire network: A highly oxidation-resistant copper nanowire electrode for flexible optoelectronics. ACS Nano 2014, 8, 10973–10979. [Google Scholar] [CrossRef]
- Ivanov, A. Implementation of Flexible Displays for Smart Textiles Using Processes of Printed Electronics. In Proceedings of the 2019 IMAPS Nordic Conference Microelectronics Packaging (NordPac), Copenhagen, Denmark, 11–13 June 2019; pp. 21–28. [Google Scholar]
- Huang, W.H.S.; Wang, Y.C.; Hsu, P.C.; Wang, W.C.; Cavalier, A.; Huang, T.H.; Shen, C.L. Flexible LED Displays for Electronic Textiles. In Proceedings of the 2018 International Flexible Electronics Technology Conference (IFETC), Ottawa, ON, Canada, 7–9 August 2018; Volume 2, pp. 4–6. [Google Scholar]
- Lin, J.; Yan, B.; Wu, X.; Ren, T.; Liu, L. Stretchable interconnections for flexible electronic systems. In Proceedings of the 31st Annual International Conference of the IEEE Engineering in Medicine and Biology Society: Engineering the Future of Biomedicine, EMBS 2009, Minneapolis, MN, USA, 2–6 September 2009; pp. 4124–4127. [Google Scholar]
- Nathan, A.; Park, B.; Sazonov, A.; Tao, S.; Chan, I.; Servati, P.; Karim, K.; Charania, T.; Striakhilev, D.; Ma, Q.; et al. Amorphous silicon detector and thin film transistor technology for large-area imaging of X-rays. Microelectronics J. 2000, 31, 883–891. [Google Scholar] [CrossRef]
- Jin, H.-C.; Abelson, J.R.; Erhardt, M.K.; Nuzzo, R.G. Soft lithographic fabrication of an image sensor array on a curved substrate. J. Vac. Sci. Technol. B Microelectron. Nanom. Struct. 2004, 22, 2548. [Google Scholar] [CrossRef]
- Ko, H.C.; Stoykovich, M.P.; Song, J.; Malyarchuk, V.; Choi, W.M.; Yu, C.J.; Geddes, J.B.; Xiao, J.; Wang, S.; Huang, Y.; et al. A hemispherical electronic eye camera based on compressible silicon optoelectronics. Nature 2008, 454, 748–753. [Google Scholar] [CrossRef] [PubMed]
- Karnaushenko, D.; Münzenrieder, N.; Karnaushenko, D.D.; Koch, B.; Meyer, A.K.; Baunack, S.; Petti, L.; Tröster, G.; Makarov, D.; Schmidt, O.G. Biomimetic Microelectronics for Regenerative Neuronal Cuff Implants. Adv. Mater. 2015, 27, 6797–6805. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Lou, C.; Li, R.; Li, Z.; Liang, T.; Wei, Z.; Run, M.; Yan, X.; Liu, X. Flexible Graphene Electrodes for Prolonged Dynamic ECG Monitoring. Sensors 2016, 16, 1833. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Schwartz, G.; Tee, B.C.-K.; Mei, J.; Appleton, A.L.; Kim, D.H.; Wang, H.; Bao, Z. Flexible polymer transistors with high pressure sensitivity for application in electronic skin and health monitoring. Nat. Commun. 2013, 4, 1859. [Google Scholar] [CrossRef]
- Kim, J.; Kim, M.; Lee, M.S.; Kim, K.; Ji, S.; Kim, Y.T.; Park, J.; Na, K.; Bae, K.H.; Kim, H.K.; et al. Wearable smart sensor systems integrated on soft contact lenses for wireless ocular diagnostics. Nat. Commun. 2017, 8, 14997. [Google Scholar] [CrossRef] [Green Version]
- Debener, S.; Emkes, R.; De Vos, M.; Bleichner, M. Unobtrusive ambulatory EEG using a smartphone and flexible printed electrodes around the ear. Sci. Rep. 2015, 5, 16743. [Google Scholar] [CrossRef] [Green Version]
- Kinkeldei, T.; Zysset, C.; Münzenrieder, N.; Petti, L.; Tröster, G. In Tube Integrated Electronic Nose System on a Flexible Polymer Substrate. Sensors 2012, 12, 13681–13693. [Google Scholar] [CrossRef] [Green Version]
- Shin, S.H.; Ji, S.; Choi, S.; Pyo, K.H.; An, B.W.; Park, J.; Kim, J.; Kim, J.Y.; Lee, K.S.; Kwon, S.Y.; et al. Integrated arrays of air-dielectric graphene transistors as transparent active-matrix pressure sensors for wide pressure ranges. Nat. Commun. 2017, 8, 14950. [Google Scholar] [CrossRef] [Green Version]
- Gao, W.; Ota, H.; Kiriya, D.; Takei, K.; Javey, A. Flexible Electronics toward Wearable Sensing. Acc. Chem. Res. 2019, 52, 523–533. [Google Scholar] [CrossRef]
- Khan, Y.; Garg, M.; Gui, Q.; Schadt, M.; Gaikwad, A.; Han, D.; Yamamoto, N.A.D.; Hart, P.; Welte, R.; Wilson, W.; et al. Flexible Hybrid Electronics: Direct Interfacing of Soft and Hard Electronics for Wearable Health Monitoring. Adv. Funct. Mater. 2016, 26, 8764–8775. [Google Scholar] [CrossRef]
- Wang, X.; Liu, Z.; Zhang, T. Flexible Sensing Electronics for Wearable/Attachable Health Monitoring. Small 2017, 13, 1602790. [Google Scholar] [CrossRef] [PubMed]
- Nath, M.M.; Gupta, G. Characterization of a Flexible Device using a 3-Point Rolling Test. In Proceedings of the 2018 International Flexible Electronics Technology Conference (IFETC), Ottawa, ON, Canada, 7–9 August 2018; pp. 1–5. [Google Scholar]
- Suo, Z.; Ma, E.Y.; Gleskova, H.; Wagner, S. Mechanics of rollable and foldable film-on-foil electronics. Appl. Phys. Lett. 1999, 74, 1177–1179. [Google Scholar] [CrossRef]
- Luo, X.; Zhang, B.; Zhang, G. Fatigue of metals at nanoscale: Metal thin films and conductive interconnects for flexible device application. Nano Mater. Sci. 2019, 1, 198–207. [Google Scholar] [CrossRef]
- Endler, S.; Angelopoulos, E.A.; Harendt, C.; Hoang, T.; Rempp, H.; Burghartz, J.N. Ultradünne Chips in flexibler Elektronik. In Elektronische Baugruppen Und Leiterplatten 2012; 14.–15.02.2012 Fellbach; VDE Verlag GmbH: Berling, Germany, 2012; pp. 73–77. [Google Scholar]
- Kröninger, W.; Mariani, F. Thinning and singulation of silicon: Root causes of the damage in thin chips. In Proceedings of the 56th Electronic Components and Technology Conference 2006, San Diego, CA, USA, 30 May–2 June 2006; pp. 1317–1322. [Google Scholar]
- Harman, M.; Nguyen, X.; Sirois, E.; Sun, W. Three-point bending device for flexure testing of soft tissues. In Proceedings of the 2009 IEEE 35th Annual Northeast Bioengineering Conference, Boston, MA, USA, 3–5 April 2009; pp. 1–2. [Google Scholar]
- Käsewieter, J.; Kajari-Schröder, S.; Niendorf, T.; Brendel, R. Failure stress of epitaxial silicon thin films. Energy Procedia 2013, 38, 926–932. [Google Scholar] [CrossRef] [Green Version]
- Ferwana, S.; Angelopoulos, E.A.; Endler, S.; Harendt, C.; Burghartz, J.N. A flexible stress sensor using a sub-10 μm silicon chip technology. In Proceedings of the 2013 Transducers & Eurosensors XXVII: The 17th International Conference on Solid-State Sensors, Actuators and Microsystems (TRANSDUCERS & EUROSENSORS XXVII), Barcelona, Spain, 16–20 June 2013; pp. 2628–2631. [Google Scholar]
- Landesberger, C.; Klink, G.; Schwinn, G.; Aschenbrenner, R. New dicing and thinning concept improves mechanical reliability of ultra thin silicon. In Proceedings of the International Symposium on Advanced Packaging Materials Processes, Properties and Interfaces (IEEE Cat. No.01TH8562), Braselton, GA, USA, 11–14 March 2001; pp. 92–97. [Google Scholar]
- Pilkey, W.D. Formulas for Stress, Strain, and Structural Matrices; John Wiley & Sons: Hoboken, NJ, USA, 2005; ISBN 0-471-03221-2. [Google Scholar]
- Zhu, X.; Li, X.; Nistala, R.R.; Zhao, S.P.; Xie, J.; Myo, M.T.; Park, J.S. 4-point-bending characterization of interfacial adhesion strength of SiN/Cu Film Stack. In Proceedings of the 2017 IEEE 24th International Symposium on the Physical and Failure Analysis of Integrated Circuits (IPFA), Chengdu, China, 4–7 July 2017; pp. 1–4. [Google Scholar]
- Lund, E.; Finstad, T.G. Design and construction of a four-point bending based set-up for measurement of piezoresistance in semiconductors. Rev. Sci. Instrum. 2004, 75, 4960–4966. [Google Scholar] [CrossRef]
- Liu, Y.; Yu, H.; Hiblot, G.; Kruv, A.; Schaekers, M.; Horiguchi, N.; Velenis, D.; De Wolf, I. Study of the Mechanical Stress Impact on Silicide Contact Resistance by 4-Point Bending. In Proceedings of the 2019 IEEE International Reliability Physics Symposium (IRPS), Monterey, CA, USA, 31 March–4 April 2019; pp. 1–5. [Google Scholar]
- Matthewson, M.J.; Nelson, G.J. A novel four-point bend test for strength measurement of optical fibers and thin beams. II. Statistical analysis. J. Lightwave Technol. 1996, 14, 564–571. [Google Scholar] [CrossRef]
- Nelson, G.J.; Matthewson, M.J.; Lin, B. A novel four-point bend test for strength measurement of optical fibers and thin beams—Part I: Bending analysis. J. Lightwave Technol. 1996, 14, 555–563. [Google Scholar] [CrossRef]
- Lavvafi, H.; Lewandowski, J.R.; Lewandowski, J.J. Flex bending fatigue testing of wires, foils, and ribbons. Mater. Sci. Eng. A 2014, 601, 123–130. [Google Scholar] [CrossRef]
- Hsueh, C.H. Modeling of elastic deformation of multilayers due to residual stresses and external bending. J. Appl. Phys. 2002, 91, 9652–9656. [Google Scholar] [CrossRef]
- Happonen, T.; Ritvonen, T.; Korhonen, P.; Häkkinen, J.; Fabritius, T. Bending reliability of printed conductors deposited on plastic foil with various silver pastes. Int. J. Adv. Manuf. Technol. 2016, 82, 1663–1673. [Google Scholar] [CrossRef]
- Gleskova, H.; Cheng, I.C.; Wagner, S.; Sturm, J.C.; Suo, Z. Mechanics of thin-film transistors and solar cells on flexible substrates. Sol. Energy 2006, 80, 687–693. [Google Scholar] [CrossRef]
- Kim, B.J.; Shin, H.A.S.; Jung, S.Y.; Cho, Y.; Kraft, O.; Choi, I.S.; Joo, Y.C. Crack nucleation during mechanical fatigue in thin metal films on flexible substrates. Acta Mater. 2013, 61, 3473–3481. [Google Scholar] [CrossRef]
- Vilouras, A.; Heidari, H.; Gupta, S.; Dahiya, R. Modeling of CMOS Devices and Circuits on Flexible Ultrathin Chips. IEEE Trans. Electron Devices 2017, 64, 2038–2046. [Google Scholar] [CrossRef] [Green Version]
- Bensaid, B.; Boddaert, X.; Benaben, P.; Gwoziecki, R.; Coppard, R. Reliability of OTFTs on flexible substrate: Mechanical stress effect. EPJ Appl. Phys. 2011, 55, 23907. [Google Scholar] [CrossRef]
- Wright, D.N.; Vardøy, A.S.B.; Belle, B.D.; Visser Taklo, M.M.; Hagel, O.; Xie, L.; Danestig, M.; Eriksson, T. Bending machine for testing reliability of flexible electronics. In Proceedings of the 2017 IMAPS Nordic Conference on Microelectronics Packaging (NordPac), Gothenburg, Sweden, 18–20 June 2017; pp. 47–52. [Google Scholar]
- Happonen, T.; Hakkinen, J.; Fabritius, T. Cyclic Bending Reliability of Silk Screen Printed Silver Traces on Plastic and Paper Substrates. IEEE Trans. Device Mater. Reliab. 2015, 15, 394–401. [Google Scholar] [CrossRef]
- Lewis, J. Material challenge for Outside of the active devices. Mater. Today 2006, 9, 38–45. [Google Scholar] [CrossRef]
- Chen, Q.; Xu, L.; Jing, C.; Xue, T.; Salo, A.; Ojala, K. Flexible device and component reliability study using simulations. In Proceedings of the EuroSimE 2008—International Conference on Thermal, Mechanical and Multi-Physics Simulation and Experiments in Microelectronics and Micro-Systems, Freiburg im Breisgau, Germany, 20–23 April 2008; pp. 1–5. [Google Scholar]
- Angelopoulos, E.A.; Zimmermann, M.; Appel, W.; Endler, S.; Ferwana, S.; Harendt, C.; Hoang, T.; Pruemm, A.; Burghartz, J.N. Ultra-thin chip technology for system-in-foil applications. In Proceedings of the 2010 International Electron Devices Meeting (IEDM), San Francisco, CA, USA, 6–8 December 2010; pp. 2.5.1–2.5.4. [Google Scholar]
- Kim, J.H.; Lee, T.I.; Yoon, D.J.; Kim, T.S.; Paik, K.W. Effects of Anisotropic Conductive Films (ACFs) Gap Heights on the Bending Reliability of Chip-In-Flex (CIF) Packages for Wearable Electronics Applications. In Proceedings of the 2017 IEEE 67th Electronic Components and Technology Conference (ECTC), Orlando, FL, USA, 30 May–2 June 2017; pp. 2161–2167. [Google Scholar]
- Zheng, S.X.; Luo, X.M.; Wang, D.; Zhang, G.P. A novel evaluation strategy for fatigue reliability of flexible nanoscale films. Mater. Res. Express 2018, 5, 035012. [Google Scholar] [CrossRef]
- Hu, X.; Meng, X.; Zhang, L.; Zhang, Y.; Cai, Z.; Huang, Z.; Su, M.; Wang, Y.; Li, M.; Li, F.; et al. A Mechanically Robust Conducting Polymer Network Electrode for Efficient Flexible Perovskite Solar Cells. Joule 2019, 3, 2205–2218. [Google Scholar] [CrossRef]
- Soman, V.V.; Khan, Y.; Zabran, M.; Schadt, M.; Hart, P.; Shay, M.; Egitto, F.D.; Papathomas, K.I.; Yamamoto, N.A.D.; Han, D.; et al. Reliability Challenges in Fabrication of Flexible Hybrid Electronics for Human Performance Monitors: A System-Level Study. IEEE Trans. Compon. Packag. Manuf. Technol. 2019, 9, 1872–1887. [Google Scholar] [CrossRef]
- Jeong, J.H.; Kim, J.H.; Oh, C.S. Quantitative evaluation of bending reliability for a flexible near-field communication tag. Microelectron. Reliab. 2017, 75, 121–126. [Google Scholar] [CrossRef]
- Ernst, D.; Zerna, T.; Wolter, K.J. Influences of organic materials on packaging technologies and their consideration for lifetime evaluation. In Proceedings of the 2011 34th International Spring Seminar on Electronics Technology (ISSE), Tratanska Lomnica, Slovakia, 11–15 May 2011; pp. 288–293. [Google Scholar]
- Lorenz, E.; Niemann, N.; Koyuncu, M.; Bock, K. Reliability characterization of blind-hole vias for a System-in-Foil. In Proceedings of the 5th Electronics System-integration Technology Conference (ESTC), Helsinki, Finland, 16–18 September 2014. [Google Scholar]




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Material | Polyethylene Naphthalate (PEN) | Polyethylene Terephthalate (PET) | Liquid-Crystal Polymer (LCP) | Polydimethyl-Siloxane (PDMS) | Polyimide (PI) |
|---|---|---|---|---|---|
| Density (g/cm3) | 1.39 [33] | 1.41 [33] | 1.38–1.95 [34] | 0.95–1.08 [34] | 1.06–1.45 [34] |
| Young’s modulus (MPa) | 2000 [33] | 1700 [33] | 5000–20,000 [34] | 0.36–0.87 [34] | 1800–15,000 [34] |
| Poisson ratio | 0.3–0.4 [2] | 0.3–0.4 [2] | 0.4 [35] | 0.5 [2] | 0.34 [2,36,37] |
| Glass transmission temperature (°C) | 116–120 [33] | 68–114 [33] | 82–280 [34] | −125 [34] | 290–430 [34] |
| Coefficient of thermal expansion (CTE) at 20 °C (ppm/K) | 10–14 [2] | 40–50 [2] | 4–38 [34] | 180–450 [34] | 3–50 [34,36] |
| Moisture absorption (%) | 0.3 [38] | 0.4 [38] | 0.02–0.04 [34] | 0.1–1.3 [34] | 2–4 [34] |
| Challenges | Lower thermal stability [26] | Lower thermal stability [26] | Lack of self-adhesion to metal [12,34] | High gas permeability [34,39] | High moisture-uptake, short of rigidity [34,40] |
| Substrate Thickness (µm) | Structure Thickness (µm) | Bending Radius (mm) | Strain (%) |
|---|---|---|---|
| 25 | 0.2 | 1 | 1.26 |
| 25 | 2 | 5 | 0.27 |
| 25 | 5 | 10 | 0.15 |
| 50 | 0.5 | 1 | 2.53 |
| 50 | 5 | 5 | 0.55 |
| 50 | 10 | 10 | 0.30 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Saleh, R.; Barth, M.; Eberhardt, W.; Zimmermann, A. Bending Setups for Reliability Investigation of Flexible Electronics. Micromachines 2021, 12, 78. https://doi.org/10.3390/mi12010078
Saleh R, Barth M, Eberhardt W, Zimmermann A. Bending Setups for Reliability Investigation of Flexible Electronics. Micromachines. 2021; 12(1):78. https://doi.org/10.3390/mi12010078
Chicago/Turabian StyleSaleh, Rafat, Maximilian Barth, Wolfgang Eberhardt, and André Zimmermann. 2021. "Bending Setups for Reliability Investigation of Flexible Electronics" Micromachines 12, no. 1: 78. https://doi.org/10.3390/mi12010078
APA StyleSaleh, R., Barth, M., Eberhardt, W., & Zimmermann, A. (2021). Bending Setups for Reliability Investigation of Flexible Electronics. Micromachines, 12(1), 78. https://doi.org/10.3390/mi12010078