3.1. Design of the Proposed Structure at Both Ends of the Kirigami Structure to Increase the Uniform Deformation Region
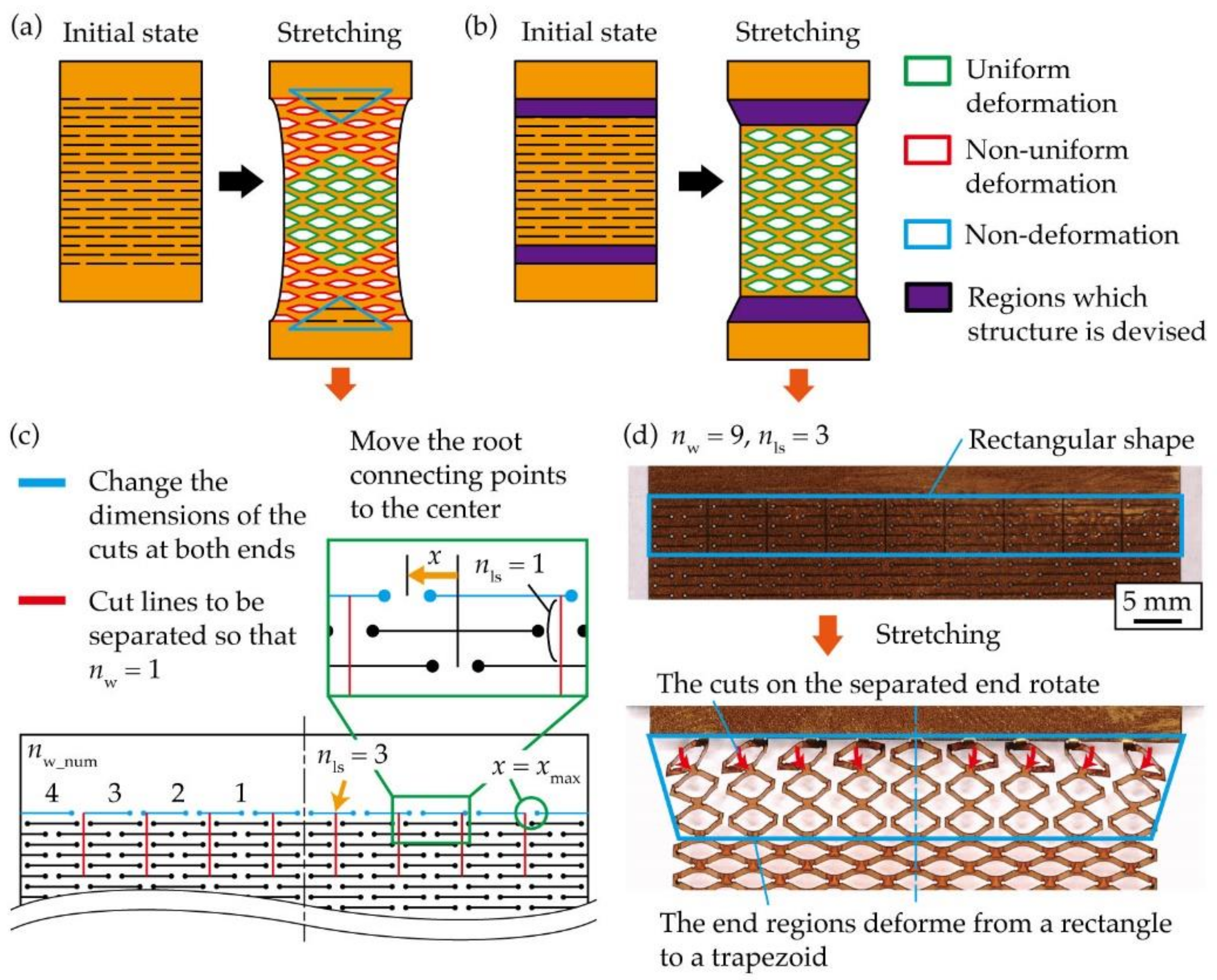
A structure was proposed to be applied at both ends of the kirigami structure to increase the uniform deformation region during stretching. As shown in
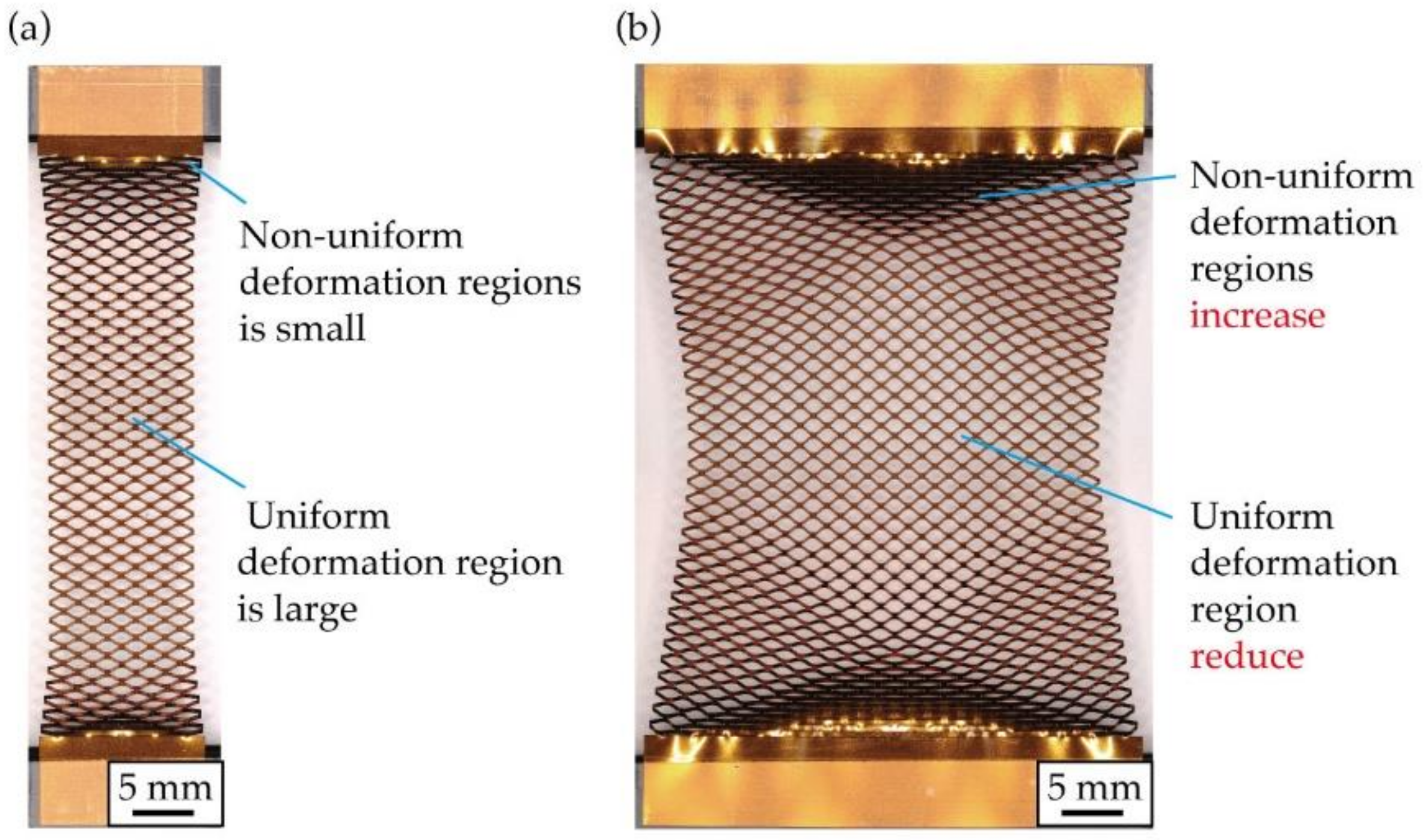
Figure 6a, when the kirigami structure is stretched, the contact points at the roots of the kirigami structure cannot move. Therefore, the amount of constriction in the width direction differs between the center and both ends, resulting in non-uniform deformation and non-deformation regions. If the difference in width constriction between the center and ends of the kirigami structure can be reduced, the uniform deformation region can be increased. If both ends of the kirigami structure can undergo shear deformation during stretching, where they only extend in the width direction, the difference in the amount of contraction in the width direction can be reduced. However, even if in-plane shear deformation can be achieved, it is difficult to achieve shear deformation at both ends of the structure because the out-of-plane deformation causes the entire substrate to tilt. Therefore, we considered a method of transforming both ends from a rectangular to a trapezoidal shape during stretching, as shown in
Figure 6b. Therefore, the difference in width constriction between the center and ends can be reduced by deforming the ends of the kirigami structure from a rectangle to a trapezoidal shape. In a case of the conventional kirigami structure shown in
Figure 6a, the stress distribution gradually becomes uniform from both ends, as in the case of general materials, and cuts are uniformly deformed near the center. In a case of the kirigami structure with the newly designed structure at both ends, shown in
Figure 6b, the stress distribution is non-uniform only in the designed structure regions at both ends and becomes uniform in the other regions, resulting in a uniform deformation of cuts.
Figure 6c shows the structure at both ends that can be transformed from a rectangular to a trapezoidal shape when stretched. First, to open a cut of the non-deformation regions at both ends during stretching, cut lines were provided to separate the widthwise cuts periodically so that
nw = 1 at both ends. We defined the number of cycles to be separated as
nls, as shown in
Figure 6c. Second, we considered moving the position of the contacts to the center to encourage the deformation of the shape at both ends from a rectangle to a trapezoid. As shown in
Figure 6c, the positions of the contacts at both ends were moved to the center.
Figure 6d shows photographs of the kirigami structure with the proposed structure at both ends during the initial state and stretching. The number of cut cycles in the kirigami structure is
nls = 2, with
nl = 35 and
nw = 9.
Figure 6d shows that the separation line encourages the opening of a cut of the non-deformation regions. In addition,
Figure 6d shows that the position of the contacts is moved to the center, which encourages a row of ends to rotate and deform into a trapezoid. From the above results, we have proposed a structure at both ends that allows the shape of the kirigami structure to be transformed from a rectangular to a trapezoidal shape during stretching.
Subsequently, we geometrically defined the deformation under elongation by modeling the kirigami structure to calculate the displacement
x [mm] of the contact, as shown in
Figure 6c.
x is equal to the amount of movement owing to the width contraction of the kirigami structure when it was stretched such that
ε.
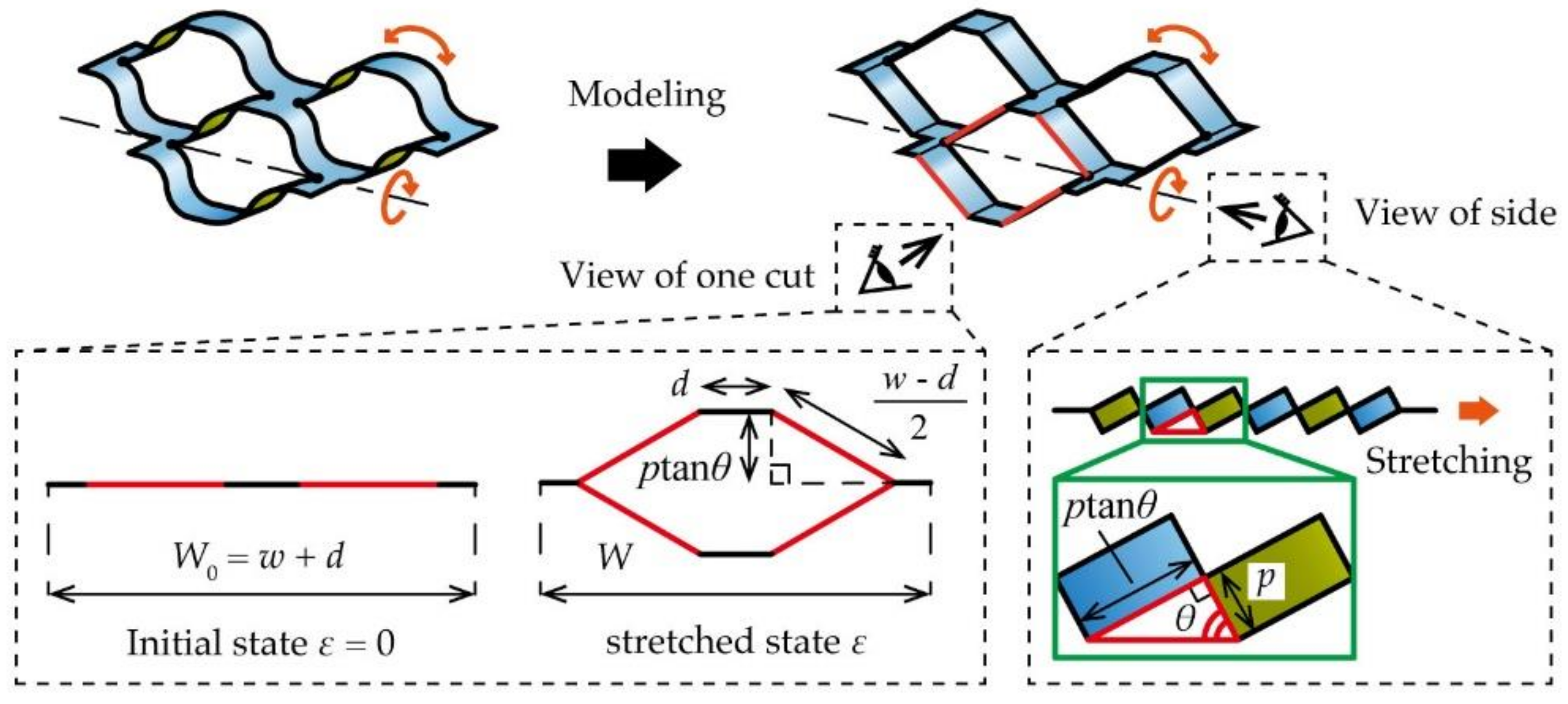
Figure 7 shows a model that considers the kirigami structure as a combination of a rigid body and pin joint. On that basis, a constriction in the width direction is defined geometrically. From
Figure 7, it can be observed that the substrate tilted owing to out-of-plane deformation when the kirigami structure was stretched. We defined the local tilt angle in this case as
θ [rad]. It is known that
θ is a parameter that varies with the strain of the stretched kirigami structure only, regardless of the dimensional parameters [
13].
θ is described by
ε as follows:
where
θ is increased with an increase in
ε and converges to
θ = п. As shown in
Figure 7, the width
W [mm] of the kirigami structure is represented using
θ and the shape parameters of the kirigami structure.
W is described by the shape parameters of the kirigami structure as follows:
where
W is reduced with an increase in
θ. As shown in
Figure 6c, we defined
nw_num, which is the number of contacts of the kirigami structure counting from the center. The
x at some
nw_num is described in
Figure 7 and Equation (6):
where
x increases as
ε increases. As shown in
Figure 6c, there is a limited amount of movement
xmax [mm] in a contact movement
x because of the separate line at both ends of the kirigami structure.
xmax is described by the shape parameters of the kirigami structure as follows:
where
xmax is varied only with
w. We set
x =
xmax when
x in Equation (7) was larger than
xmax in Equation (8).
3.2. Evaluation of the Kirigami Structure with the Proposed Structure at Both Ends
This subsection evaluates the performance of the kirigami structure with the proposed structure at both ends, as shown in
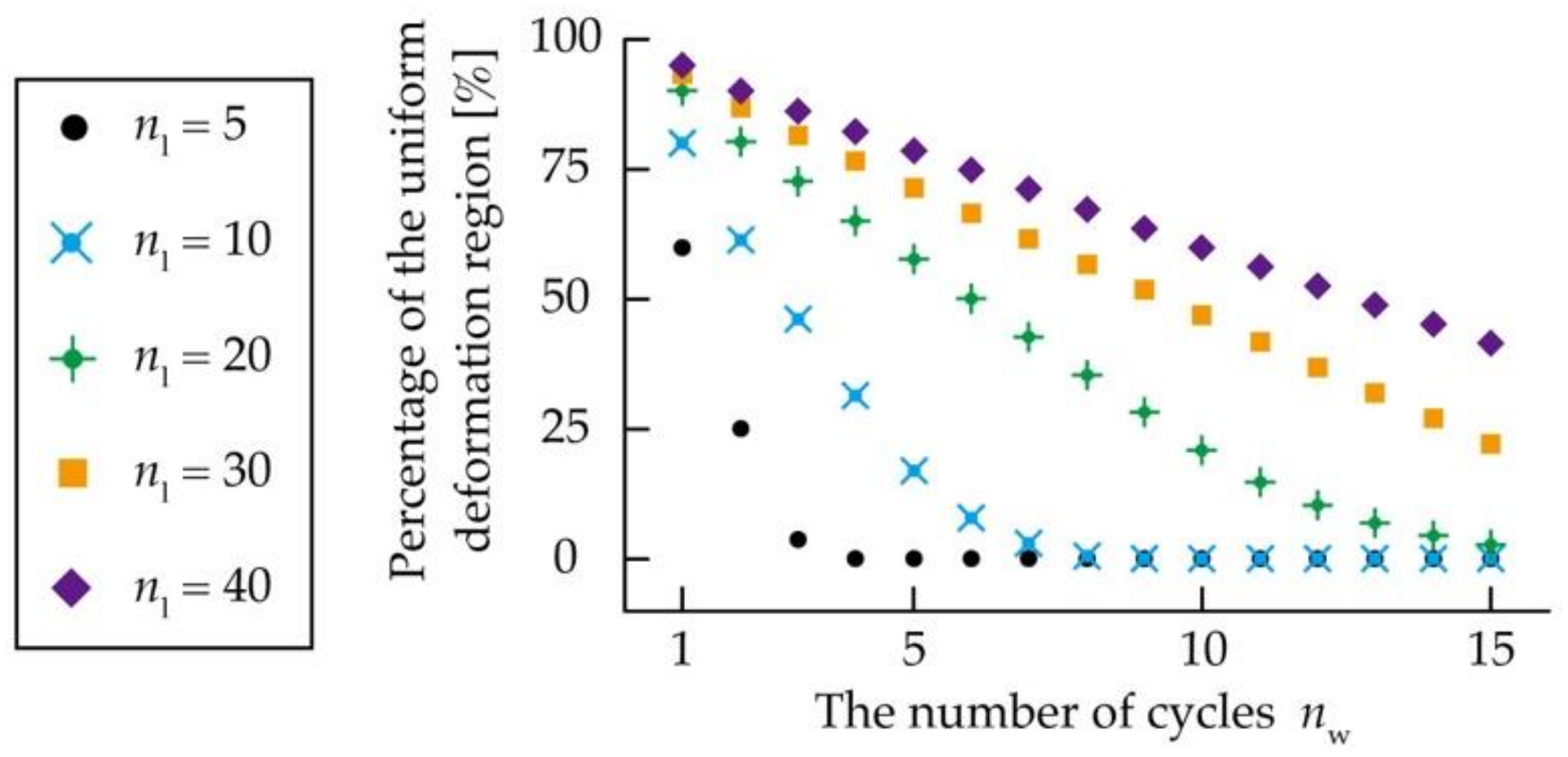
Figure 6c. We measured the amount of increase in the uniform deformation region of the kirigami structure with the proposed structural change at both ends compared to the conventional kirigami structure. From Equation (7), when
nw increases, the value of
x at the end of a row at both ends increases, and finally becomes
xmax. Consequently, we considered increasing
nls when
nw was large. Therefore, we considered that the percentage of each deformed region changes with
nls. A few test objects were fabricated with different kirigami structures and
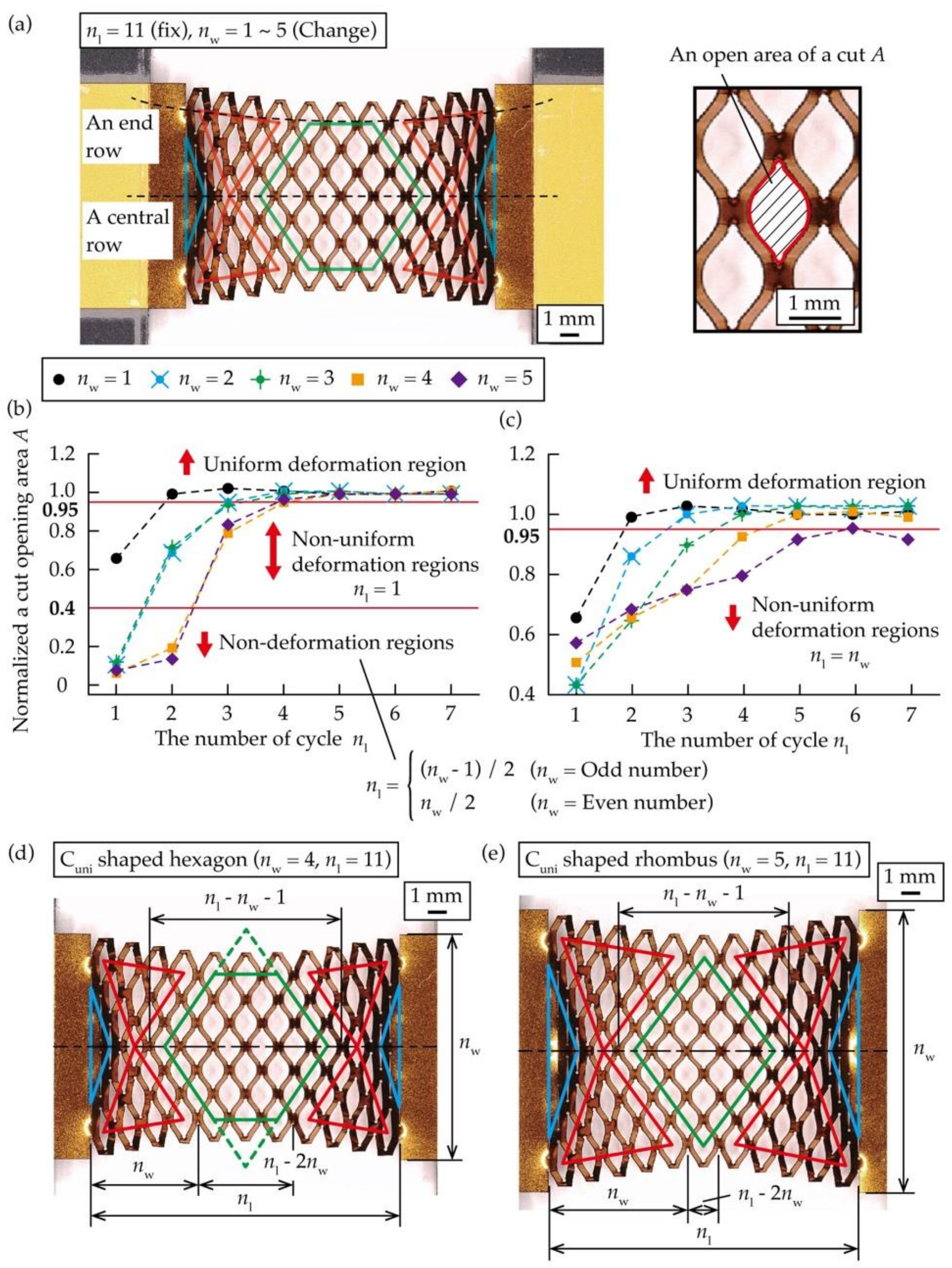
nls. Subsequently, the percentage of each deformation region was calculated by measuring
A at
ε = 0.5. The number of cut cycles of the kirigami structure in the test object was set to
nl = 35 and
nw = 15. The positions of the contacts at both ends were designed based on Equations (7) and (8), assuming that they were stretched so that
ε = 0.5. Nine different test objects, numbered from 0 to 8, were prepared, where
nls = 0 refers to the conventional kirigami structure.
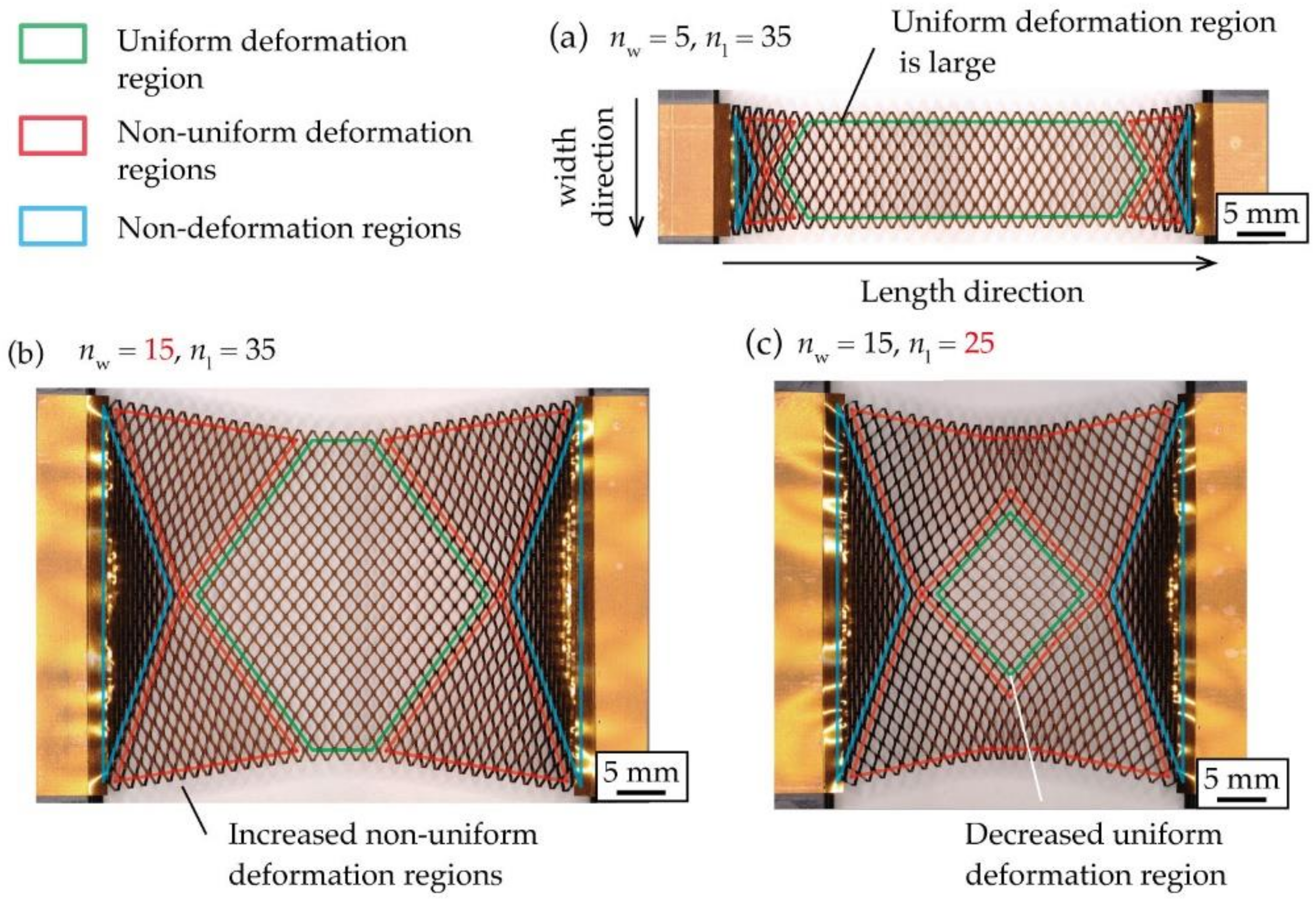
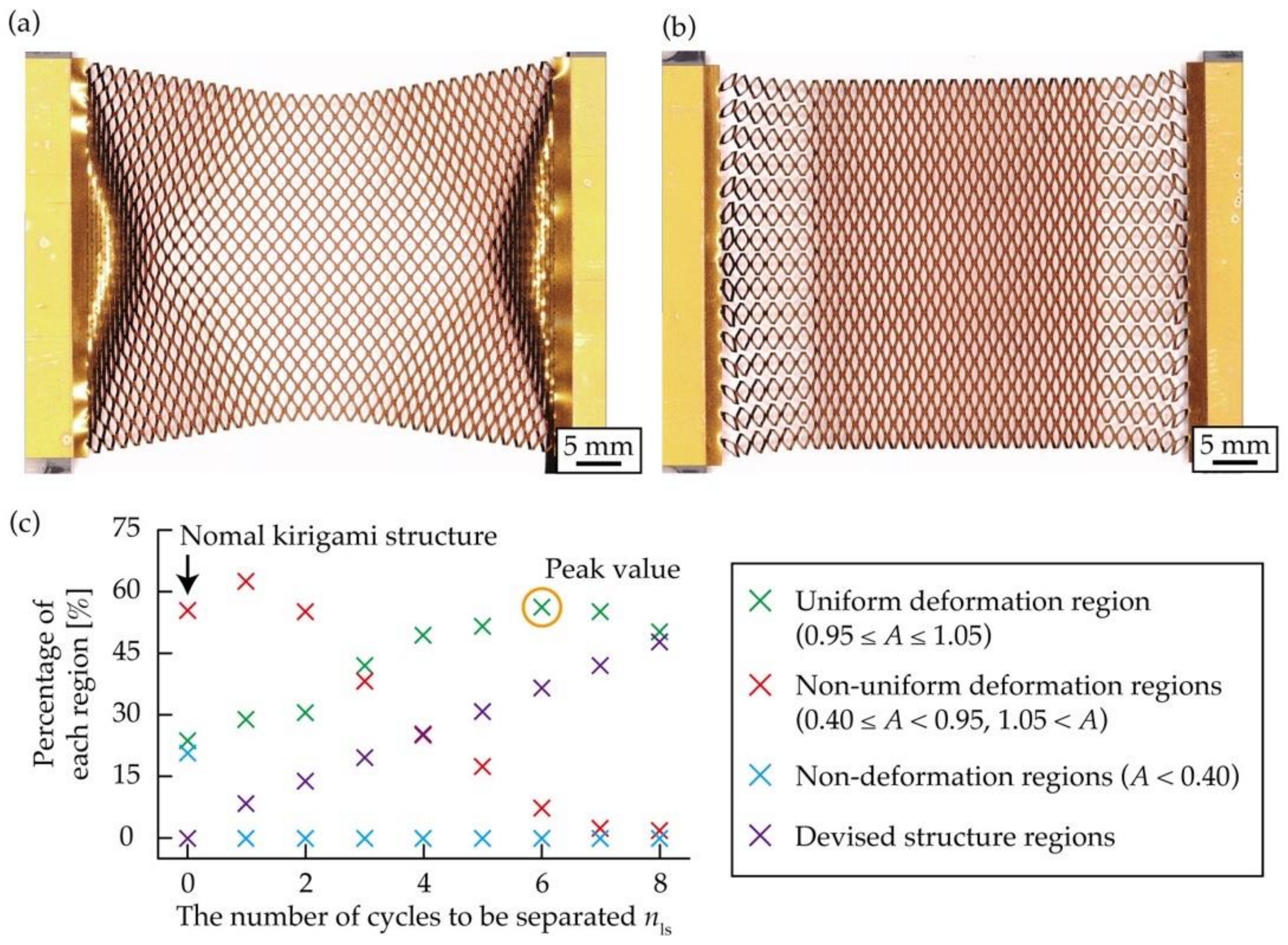
Figure 8a,b show photographs of the conventional and designed kirigami structures stretched to
ε = 0.5. By comparing
Figure 8a,b, it becomes clear that the proposed kirigami structure has a larger uniform deformation region.
Figure 8c shows a graph where the percentage of each deformation region is plotted on the vertical axis and the
nls on the horizontal axis.
Figure 8c shows that no non-deformation regions appeared in the proposed kirigami structure. As
nls increased, the percentage of the uniform deformation region increased, peaked at
nls = 6, and then decreased. The reason for this pattern is the monotonic increase in the uniform deformation region in the proposed structure at both ends with increasing
nls, and the decrease in the non-uniform deformation regions, which converges to 0%. The uniform deformation region was 23.7% for the conventional kirigami structure and 56.3% for the proposed kirigami structure of
nls = 6, which is the optimal
nls. The uniform deformation region was increased by a factor of 2.38. Therefore, it is clear that it is not enough to simply increase the size of
nls, and it is necessary to provide an optimal
nls for a given
nw.
To provide an optimal
nls for a given
nw, we calculated the percentage of the uniform deformation region for varying
nls by fabricating the kirigami structure with multiple
nw. The number of cut cycles of the kirigami structure in the test objects was fixed at
nl = 35,
nw = 15, 13, 11, 9, and 7. The positions of the contacts at both ends were designed based on Equations (7) and (8), assuming that they were stretched so that
ε = 0.5. The percentage of the uniform deformation region was calculated for each test object by measuring
A when the
nls values were varied and stretched to
ε = 0.5. The percentage of the uniform deformation region is presented in
Table 1 when the kirigami structures were stretched so that
ε = 0.5.
Table 1 shows that the percentage of the uniform deformation region takes a peak value at a particular
nls for each
nw. In addition, the optimal
nls was increased monotonically with the increase of
nw.
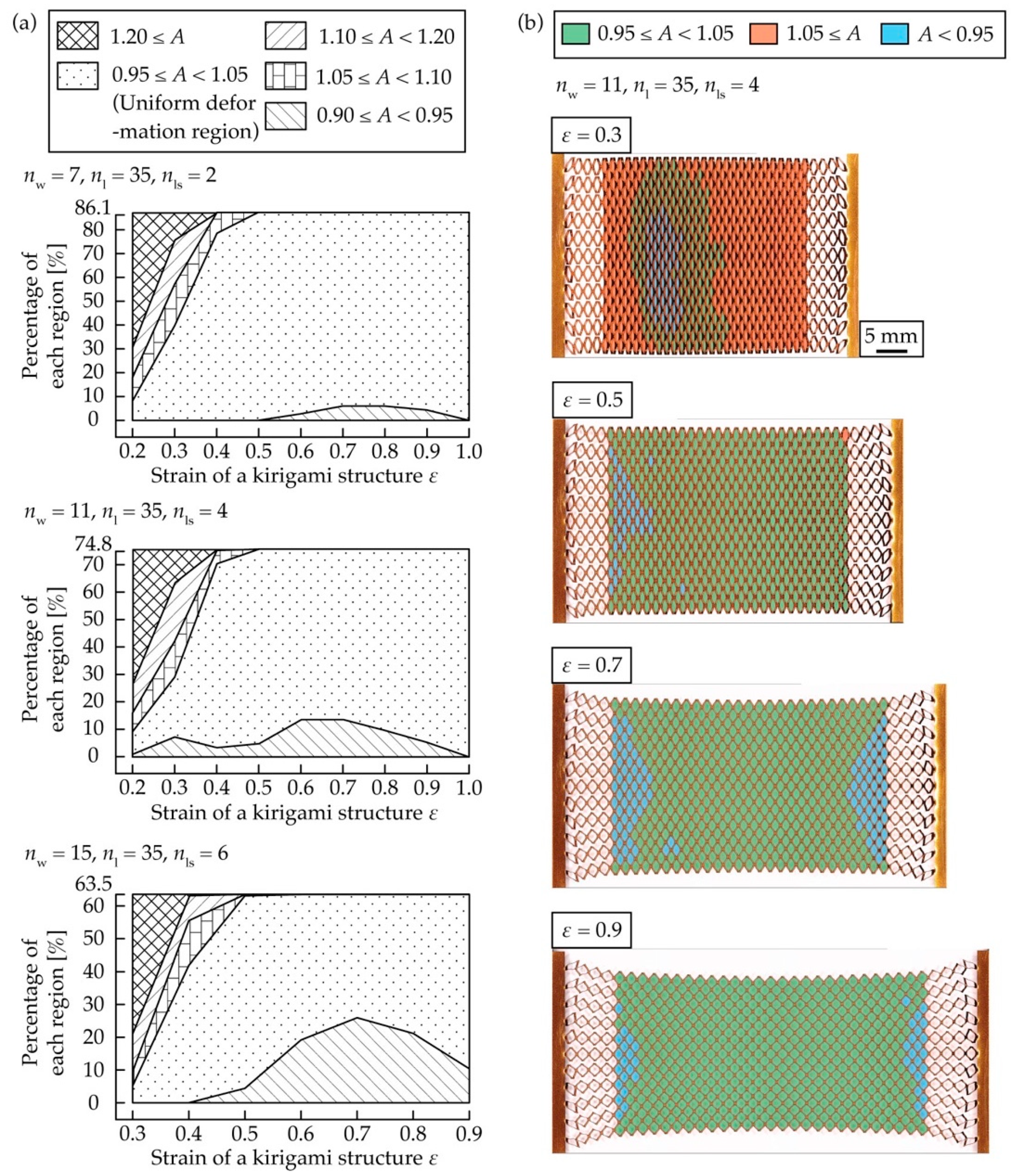
We checked how the uniform deformation region of the kirigami structure with an optimal
nls for a given
nw changes with
ε during stretching. The number of cut cycles of the kirigami structure in a test object was set to
nw = 7,
nls = 2,
nw = 11,
nls = 4,
nw = 15, and
nls = 6, with the optimal
nls according to
Table 1, with
nl = 35 as the fixed number of cut cycles. The positions of the contacts at both ends were designed based on Equations (7) and (8), assuming that they were stretched so that
ε = 0.5. The kirigami structure was stretched from
ε = 0.2 to 1.0, and
A was measured for every
ε = 0.1.
Figure 9a shows a graph of plotted measured values, where the horizontal axis is
ε and the vertical axis is the percentage of the range of each
A relative to the entire area. For the test object with
nw = 15 and
nls = 6, measurement values were not available for
ε = 0.2 because cuts did not open, except for the proposed structure, and for
ε = 1.0 because the test object broke down.
From
Figure 9a, for all test pieces, the percentage of the uniform deformation region has a low value up to
ε = 0.3, which is less than half of the design value of
ε = 0.5, and is similar to the design value of
ε = 0.5 from
ε = 0.4 to
ε = 1.0. This is due to the fact that the range of 1.10 ≤
A is larger when
ε = 0.2 and 0.3.
Figure 9b shows photographs with a color histogram of the range of each
A for the test pieces with
nw = 11 and
nls = 4 at
ε = 0.3, 0.5, 0.7, and 0.9. The decrease in the percentage of the uniform deformation region to
ε = 0.3 was probably because the regions with the proposed structure at both ends were stretched compared to the central region, and the difference in the amount of the deformation of cuts was large, as can be seen in the photograph for
ε = 0.3 in
Figure 9b. The easy deformation of the structural devising region was due to the fact that cut lines were provided to periodically separate the widthwise cuts so that
nw = 1 at both ends. Excessive contraction in the width direction occurred in the region with the designed structure at both ends compared to the center. As a result, cuts connected to the region with the designed structure at both ends were deformed more than those in the center, and the amount of deformation gradually decreased as it approached the center, as shown in
Figure 9b. As
ε increased, the percentage of the uniform deformation region increased because the difference in the amount of deformation between the cuts in the region with the designed structure at both ends and the central region became smaller.
Figure 9b shows that at
ε = 0.7 and 0.9, the amount of deformation of the cuts at both ends connected to the region with the designed structure at both ends was smaller than that of the central cuts. However, the difference in
A is not a big problem since it was only a few percent, as shown in
Figure 9a.
Figure 9a,b show that the designed kirigami structure was stretched so that
ε = 0.5 did not expand the uniform deformation region in the small strain region up to approximately
ε = 0.3; however, it did expand the uniform deformation region in the strain region to greater than
ε = 0.4. The results show that the deformation should be stretched at a higher
ε than the design value because the percentage of the uniform deformation region becomes extremely small below the design value of
ε.
To confirm an optimal
nls for the change in
ε, we calculated the percentage of the uniform deformation region for varying
nls by stretching the kirigami structure to various
ε. The number of cut cycles of the kirigami structure in the test objects was fixed at
nl = 35 and
nw = 7. The positions of the contacts at both ends were designed based on Equations (7) and (8), assuming that they were stretched so that
ε = 0.3, 0.5, 0.7, and 0.9. The percentage of the uniform deformation region was calculated for each test object by measuring
A when the
nls values were varied and stretched to
ε = 0.3, 0.5, 0.7, and 0.9. The corresponding percentage of the uniform deformation regions is presented in
Table 2. The measurement error of
A at
ε = 0.3 was large, so that three measurements were made on different test pieces at
ε = 0.3, and the average values are shown in
Table 2; the optimal
nls does not change when
ε is changed and
nw = 7.
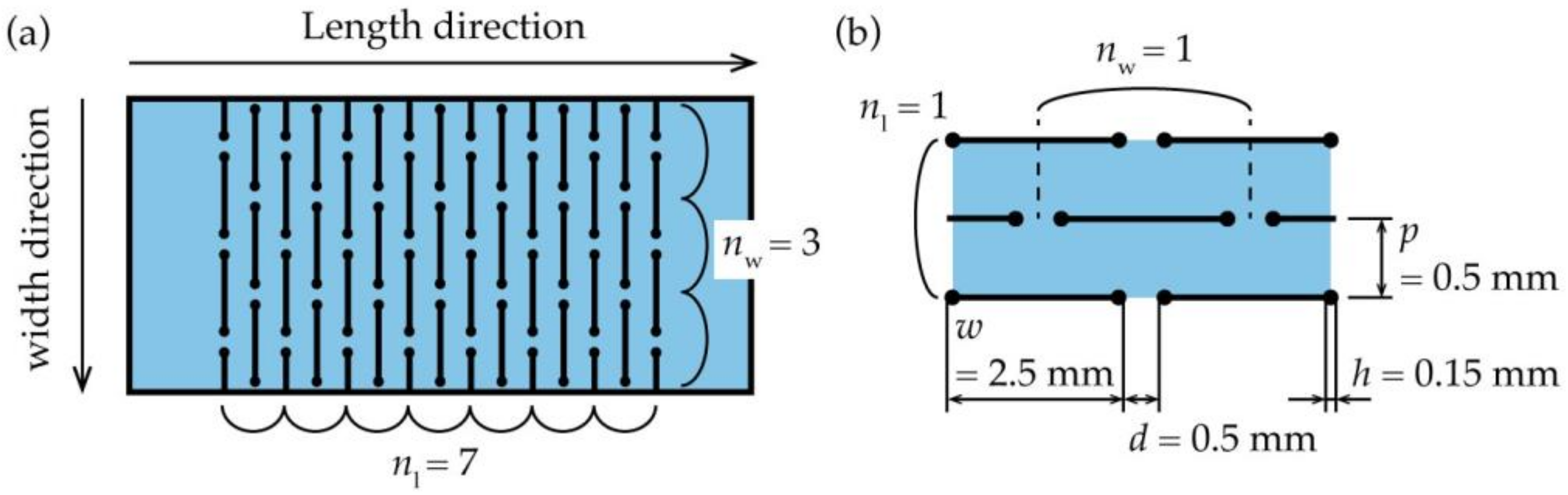
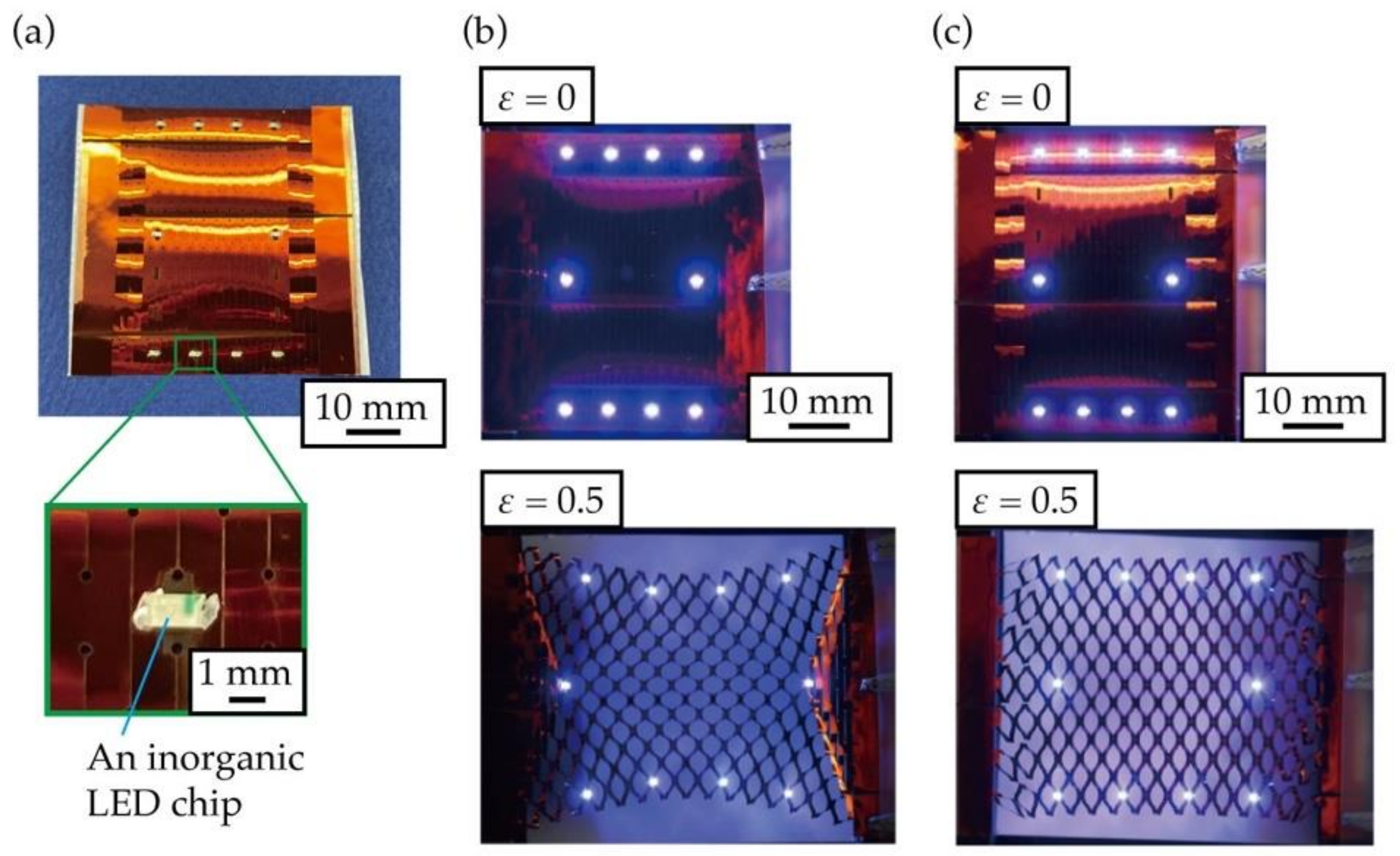
Finally, to demonstrate the usefulness of the designed kirigami structure at both ends, we fabricated an LED array with inorganic LEDs mounted on a substrate with the designed kirigami structure applied to a film-like electronic substrate. Polyimide copper substrates were used as the substrate material. The kirigami structure and copper wiring patterning were performed using a UV laser processing machine. The dimensions of the kirigami structure were
w = 5.5 mm,
d = 1.6 mm,
p = 1.2 mm, and
h = 0.15 mm. The number of cut cycles in the kirigami structure was set to
nl = 15,
nw = 7, and the optimal
nls from
Table 1 was
nls = 2. The positions of the contacts at both ends were designed based on Equations (7) and (8), assuming that they were stretched so that
ε = 0.5. We fabricated an LED array using inorganic LEDs on an electronic substrate with a conventional kirigami structure and the proposed kirigami structure. Further, the array was in the form of a rectangle shape. Photographs of the fabricated LED array are shown in
Figure 10a. Photographs of the fabricated LED arrays during stretching are shown in
Figure 10b,c.
Figure 10b shows that the rectangular shape made by the LEDs was distorted when the LED array was stretched in the conventional kirigami structure. In contrast, in the designed kirigami structure, shown in
Figure 10c, the rectangular shape represented by the LEDs was not distorted during stretching. Therefore, the designed kirigami structure placed the mounted functional elements evenly and uniformly, even when stretched. In summary, it was shown that the designed kirigami structure was useful for stretchable displays and sensor arrays where sensors need to be spaced evenly during stretching.













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}