
Numerical and Experimental Investigation on the Optical Manipulation from an Axicon Lensed Fiber

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Principle for Optical Force Calculation
3. Results and Discussions
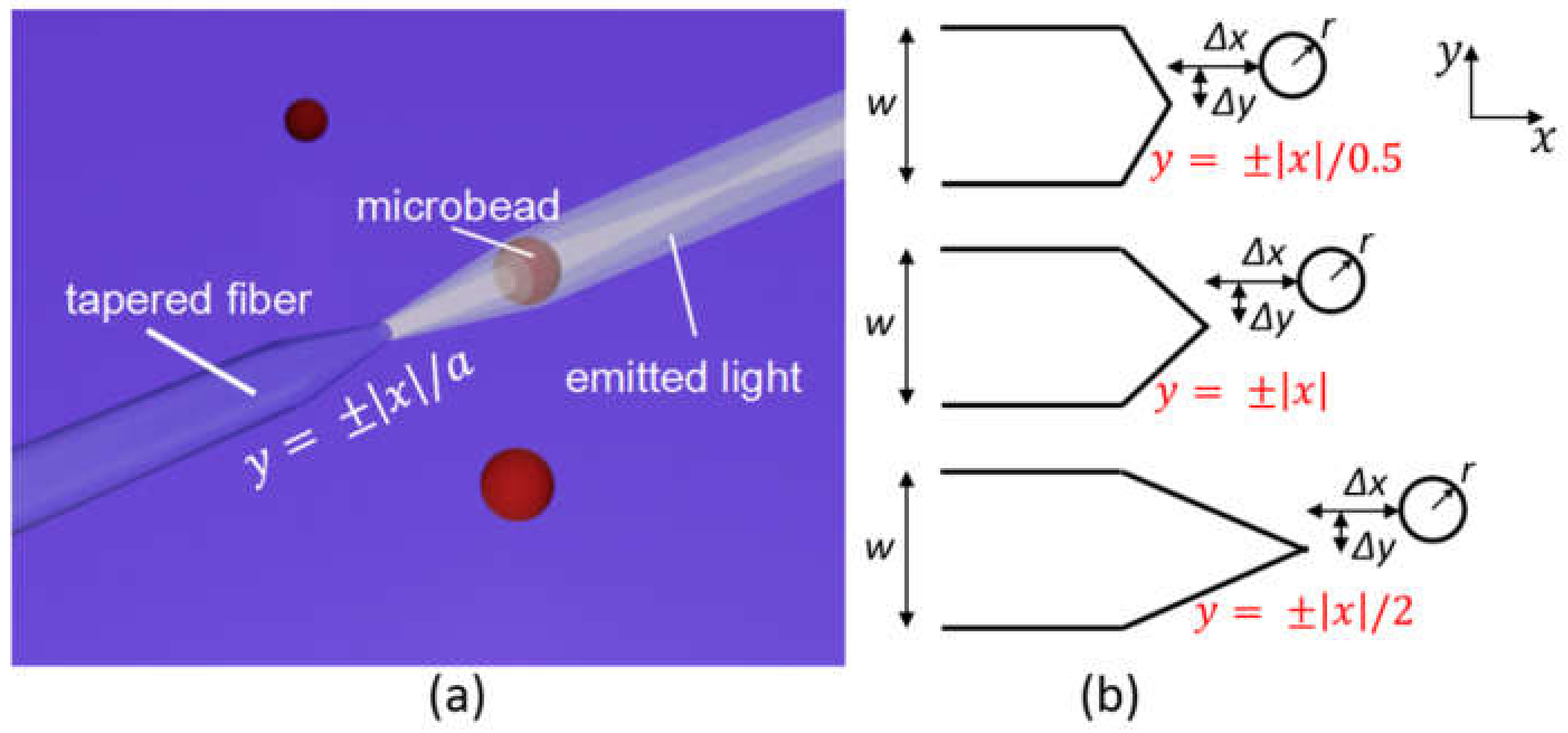
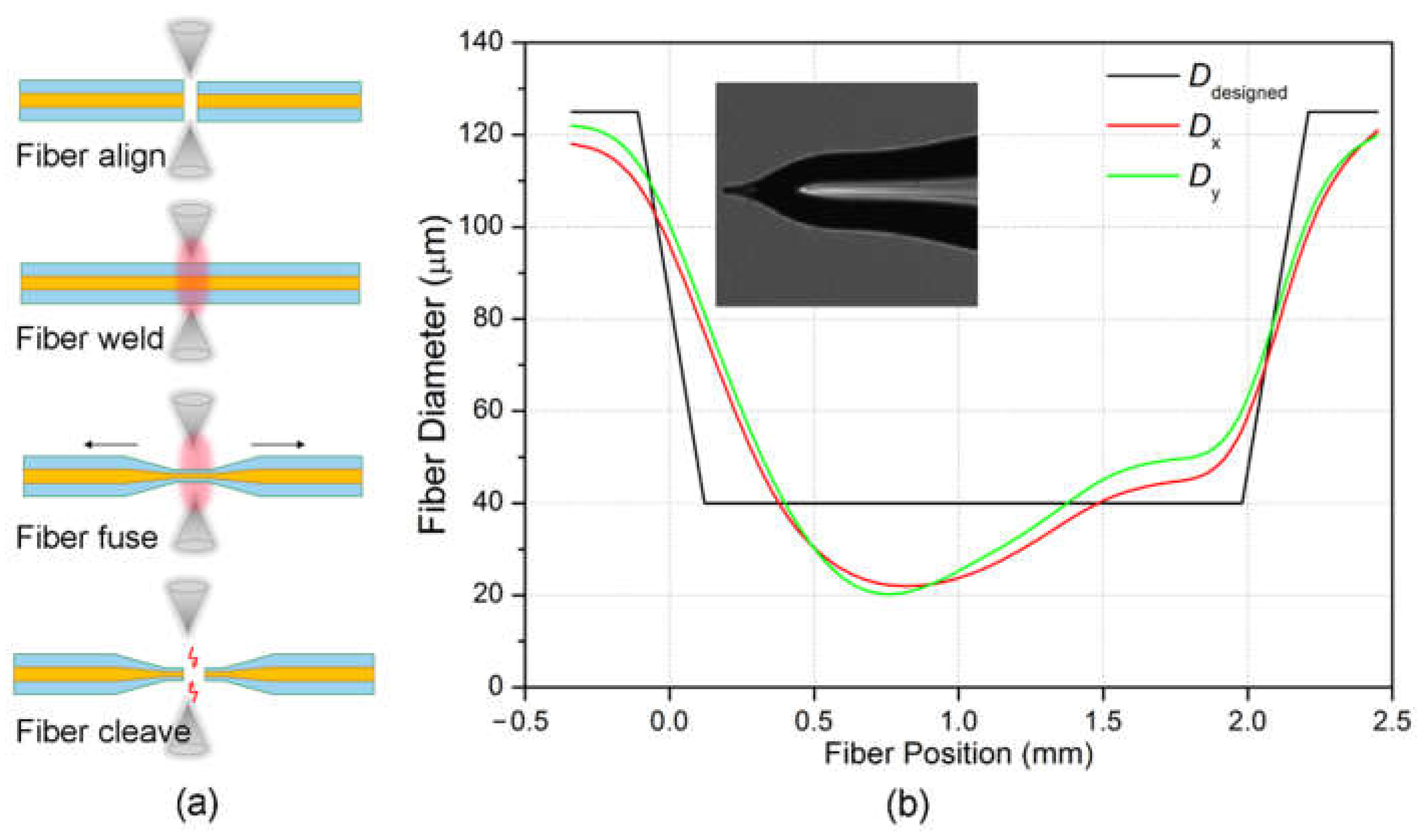
3.1. Axicon Lensed Optical Fiber Design
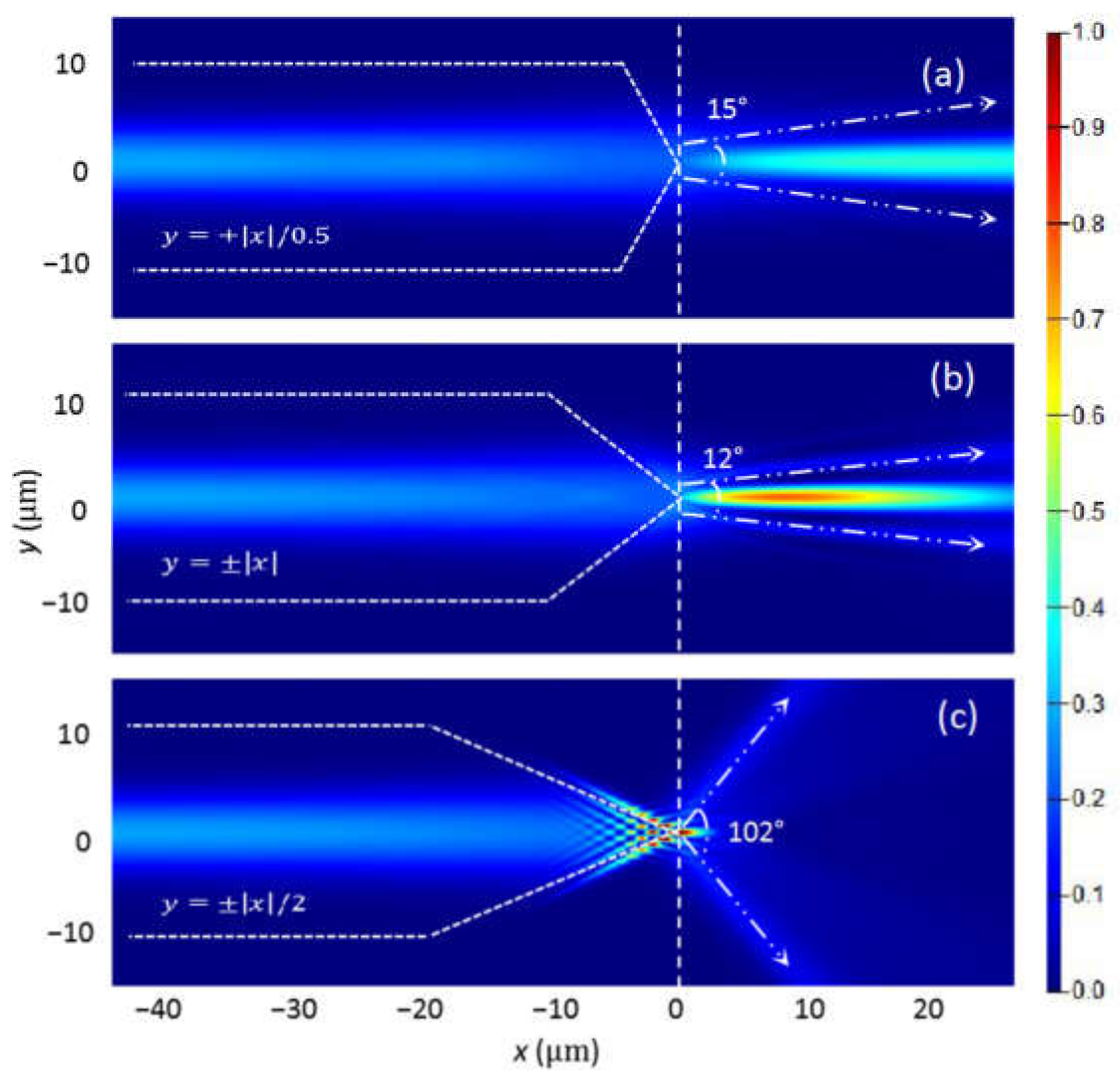
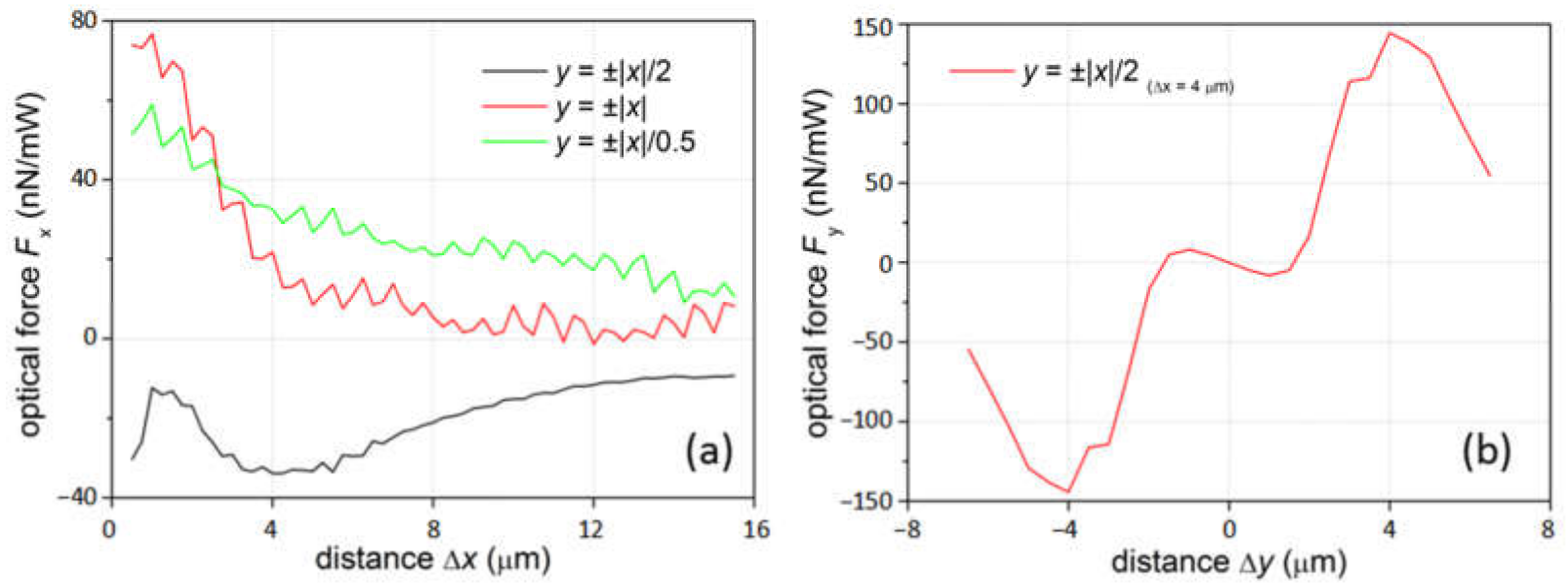
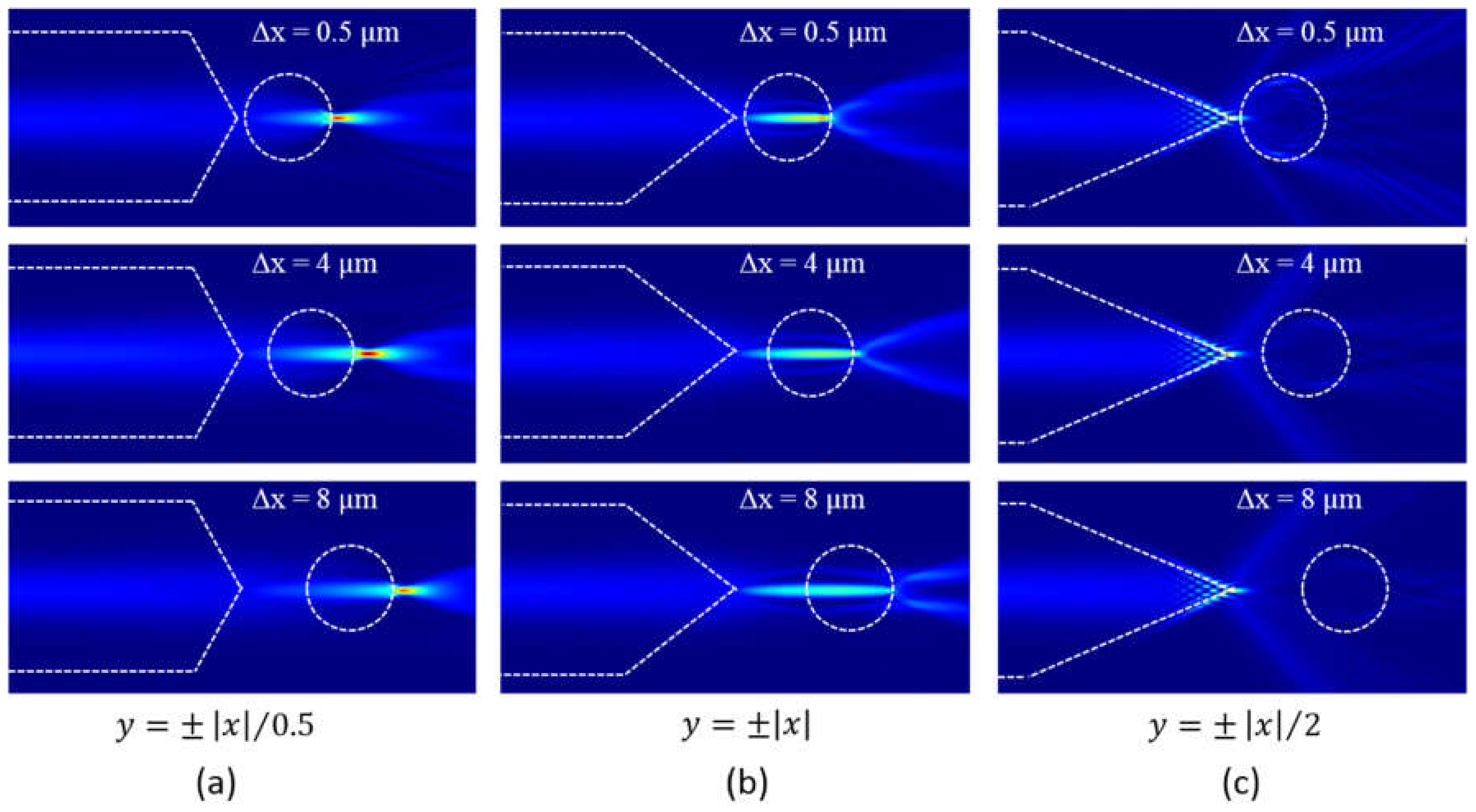
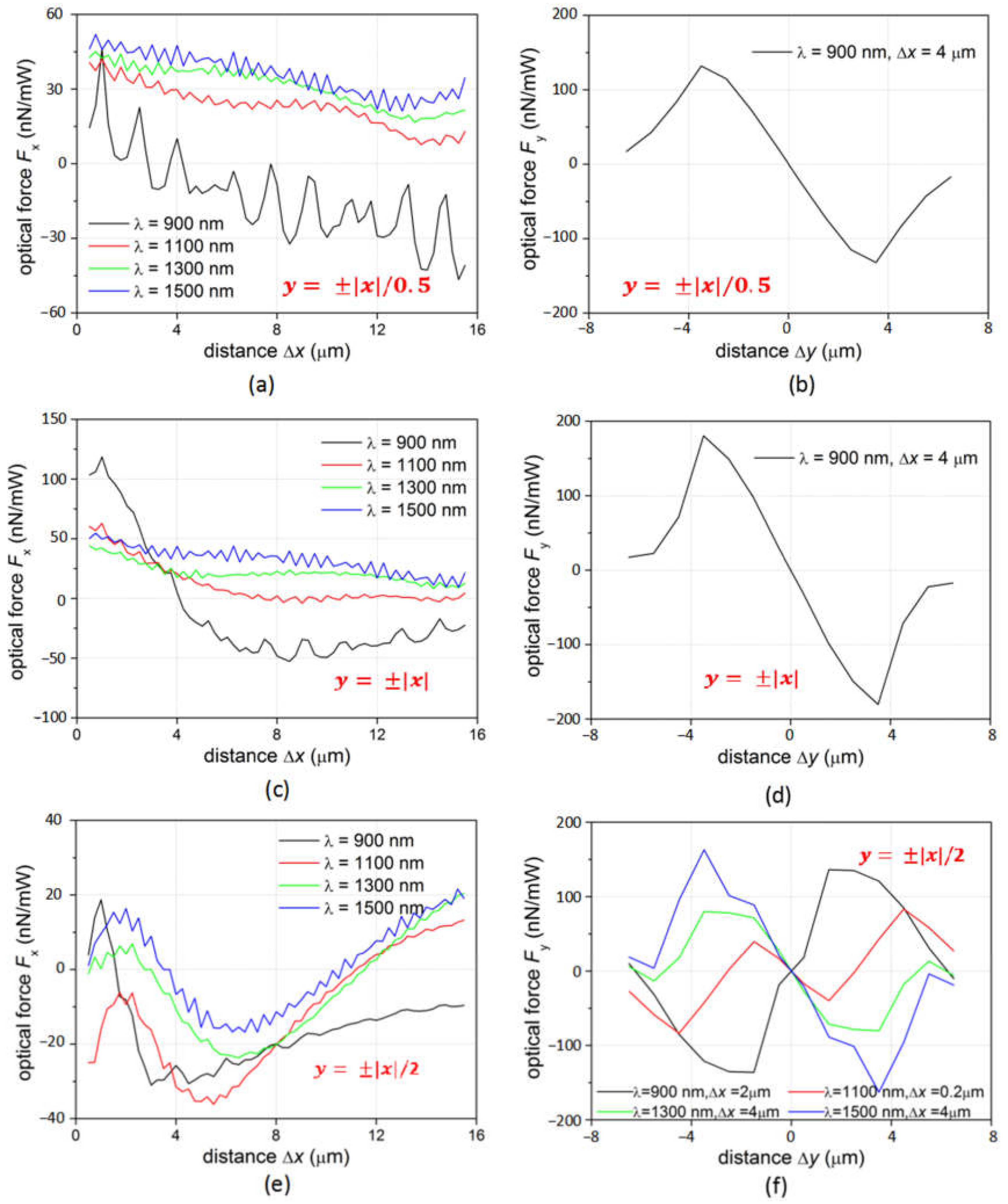
3.2. Numerical Calculation and Analysis
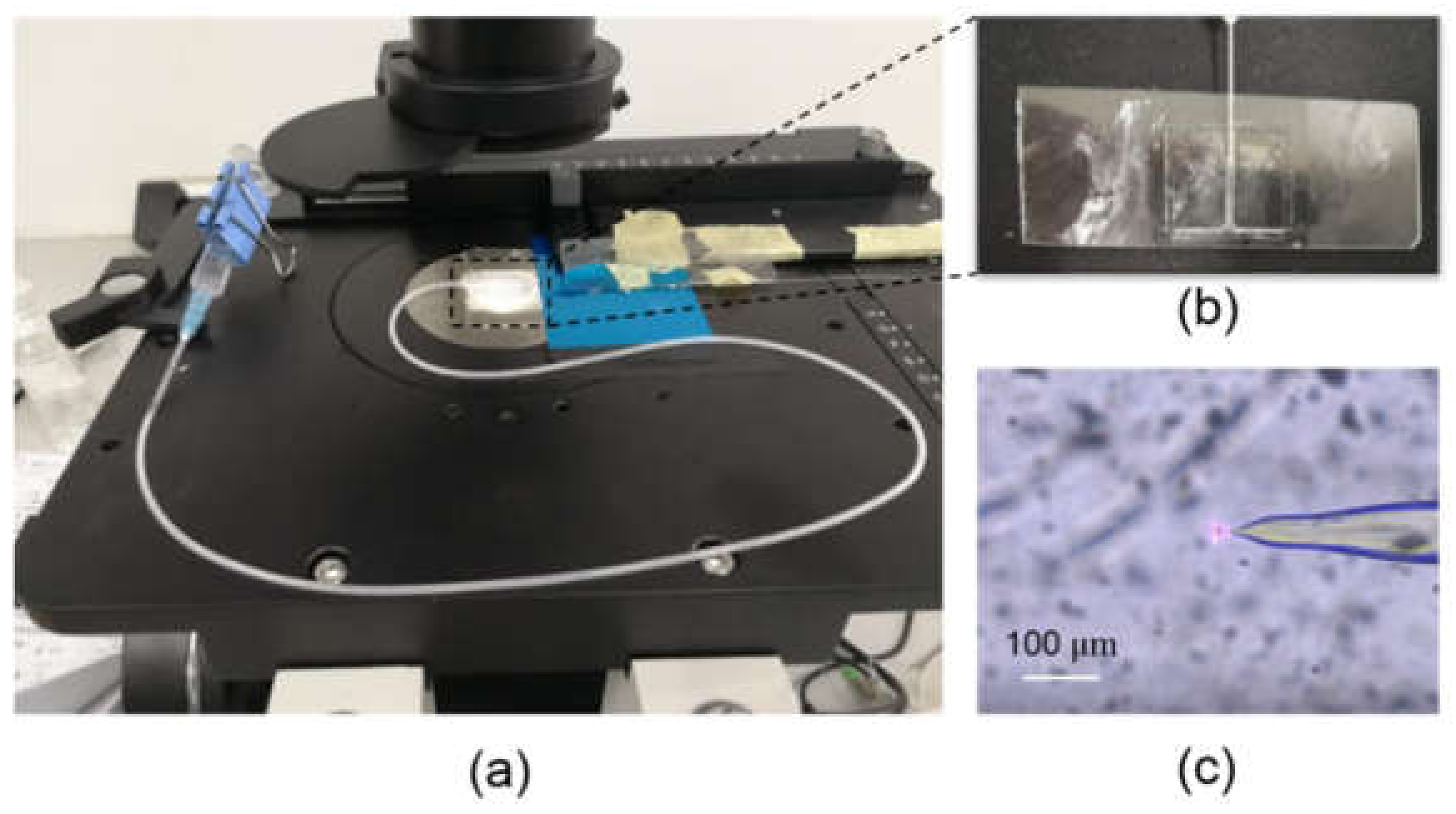
3.3. Tapered Fiber Fabrication and Experimental Results
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Nichols, E.F.; Hull, G.F. A Preliminary Communication on the Pressure of Heat and Light Radiation. Phys. Rev. 1901, 13, 307–320. [Google Scholar] [CrossRef] [Green Version]
- Ashkin, A. Acceleration and Trapping of Particles by Radiation Pressure. Phys. Rev. Lett. 1970, 24, 156–159. [Google Scholar] [CrossRef] [Green Version]
- Ashkin, A. Recent experiments with optical levitation. Opt. Commun. 1976, 18, 190–191. [Google Scholar] [CrossRef]
- Ashkin, A.; Dziedzic, J.M.; Bjorkholm, J.E.; Chu, S. Observation of a single-beam gradient force optical trap for dielectric particles. Opt. Lett. 1986, 11, 288–290. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Ashkin, A.; Dziedzic, J.M.; Yamane, T. Optical trapping and manipulation of single cells using infrared laser beams. Nature 1987, 330, 769–771. [Google Scholar] [CrossRef] [PubMed]
- Aist, J.R.; Liang, H.; Berns, M.W. Astral and spindle forces in PtK2 cells during anaphase B: A laser microbeam study. J. Cell Sci. 1993, 104, 1207–1216. [Google Scholar] [PubMed]
- Wang, H.; Liu, X.; Li, Y.; Han, B.; Lou, L.; Wang, K. Isolation of a single rice chromosome by optical micromanipulation. J. Opt. A Pure Appl. Opt. 2003, 6, 89–93. [Google Scholar] [CrossRef]
- Li, C.-Y.; Cao, D.; Song, C.-Y.; Xu, C.-M.; Ma, X.-Y.; Zhang, Z.-L.; Pang, D.-W.; Tang, H.-W. Integrating optical tweezers with up-converting luminescence: A non-amplification analytical platform for quantitative detection of microRNA-21 sequences. Chem. Commun. 2017, 53, 4092–4095. [Google Scholar] [CrossRef]
- Han, Y.L.; Ronceray, P.; Xu, G.; Malandrino, A.; Kamm, R.D.; Lenz, M.; Broedersz, C.P.; Guo, M. Cell contraction induces long-ranged stress stiffening in the extracellular matrix. Proc. Natl. Acad. Sci. USA 2018, 115, 4075–4080. [Google Scholar] [CrossRef] [Green Version]
- Neupane, K.; Hoffer, N.Q.; Woodside, M.T. Measuring the Local Velocity along Transition Paths during the Folding of Single Biological Molecules. Phys. Rev. Lett. 2018, 121, 018102. [Google Scholar] [CrossRef]
- Zhang, X.; Halvorsen, K.; Zhang, C.-Z.; Wong, W.P.; Springer, T.A. Mechanoenzymatic Cleavage of the Ultralarge Vascular Protein von Willebrand Factor. Science 2009, 324, 1330–1334. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Wen, J.-D.; Lancaster, L.; Hodges, C.; Zeri, A.-C.; Yoshimura, S.H.; Noller, H.F.; Bustamante, C.; Tinoco, I., Jr. Following translation by single ribosomes one codon at a time. Nature 2008, 452, 598–603. [Google Scholar] [CrossRef] [Green Version]
- Chen, I.W.; Papagiakoumou, E.; Emiliani, V. Towards circuit optogenetics. Curr. Opin. Neurobiol. 2018, 50, 179–189. [Google Scholar] [CrossRef]
- Xu, S.H.; Li, Y.M.; Lou, L.R.; Sun, Z.W. Computer simulation of the collision frequency of two particles in optical tweezers. Chin. Phys. 2005, 14, 382–385. [Google Scholar]
- Preece, D.; Warren, R.; Evans, R.M.L.; Gibson, G.M.; Padgett, M.J.; Cooper, J.M.; Tassieri, M. Optical tweezers: Wideband microrheology. J. Opt. 2011, 13, 044022. [Google Scholar] [CrossRef] [Green Version]
- Yang, A.H.J.; Moore, S.D.; Schmidt, B.S.; Klug, M.; Lipson, M.; Erickson, D. Optical manipulation of nanoparticles and biomolecules in sub-wavelength slot waveguides. Nature 2009, 457, 71–75. [Google Scholar] [CrossRef] [PubMed]
- Zhao, H.; Chin, L.K.; Shi, Y.; Nguyen, K.T.; Liu, P.Y.; Zhang, Y.; Zhang, M.; Zhang, J.; Cai, H.; Yap, E.P.H.; et al. Massive nanophotonic trapping and alignment of rod-shaped bacteria for parallel single-cell studies. Sens. Actuators B Chem. 2020, 306, 127562. [Google Scholar] [CrossRef]
- Zhao, H.; Chin, L.K.; Shi, Y.; Liu, P.Y.; Zhang, Y.; Cai, H.; Yap, E.P.H.; Ser, W.; Liu, A.-Q. Continuous optical sorting of nanoscale biomolecules in integrated microfluidic-nanophotonic chips. Sens. Actuators B Chem. 2021, 331, 129428. [Google Scholar] [CrossRef]
- Yuan, Y.; Lin, Y.; Gu, B.; Panwar, N.; Tjin, S.C.; Song, J.; Qu, J.; Yong, K.-T. Optical trapping-assisted SERS platform for chemical and biosensing applications: Design perspectives. Coord. Chem. Rev. 2017, 339, 138–152. [Google Scholar] [CrossRef]
- Zhu, R.X.; Avsievich, T.; Popov, A.; Meglinski, I. Optical Tweezers in Studies of Red Blood Cells. Cells 2020, 9, 545. [Google Scholar] [CrossRef] [Green Version]
- Li, Y.; Liu, X.; Li, B. Single-cell biomagnifier for optical nanoscopes and nanotweezers. Light Sci. Appl. 2019, 8, 61. [Google Scholar] [CrossRef] [Green Version]
- Lou, Y.; Wu, D.; Pang, Y. Optical Trapping and Manipulation Using Optical Fibers. Adv. Fiber Mater. 2019, 1, 83–100. [Google Scholar] [CrossRef] [Green Version]
- Liu, Z.; Guo, C.; Yang, J.; Yuan, L. Tapered fiber optical tweezers for microscopic particle trapping: Fabrication and application. Opt. Express 2006, 14, 12510–12516. [Google Scholar] [CrossRef] [PubMed]
- Xin, H.; Xu, R.; Li, B. Optical trapping, driving, and arrangement of particles using a tapered fibre probe. Sci. Rep. 2012, 2, 818. [Google Scholar] [CrossRef] [Green Version]
- Zhao, X.; Zhao, N.; Shi, Y.; Xin, H.; Li, B. Optical Fiber Tweezers: A Versatile Tool for Optical Trapping and Manipulation. Micromachines 2020, 11, 114. [Google Scholar] [CrossRef] [Green Version]
- Liu, Z.L.; Liu, Y.X.; Tang, Y.; Zhang, N.; Wu, F.P.; Zhang, B. Fabrication and application of a non-contact double-tapered optical fiber tweezers. Opt. Express 2017, 25, 22480–22489. [Google Scholar] [CrossRef] [PubMed]
- Li, Y.-C.; Xin, H.-B.; Lei, H.-X.; Liu, L.-L.; Li, Y.-Z.; Zhang, Y.; Li, B.-J. Manipulation and detection of single nanoparticles and biomolecules by a photonic nanojet. Light Sci. Appl. 2016, 5, e16176. [Google Scholar] [CrossRef]







Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, W.; Lin, Y.; Gao, Y.; Guo, Z.; Li, X.; Hu, Y.; Dong, P.; Zhang, Q.; Fang, X.; Zhang, M. Numerical and Experimental Investigation on the Optical Manipulation from an Axicon Lensed Fiber. Micromachines 2021, 12, 187. https://doi.org/10.3390/mi12020187
Zhang W, Lin Y, Gao Y, Guo Z, Li X, Hu Y, Dong P, Zhang Q, Fang X, Zhang M. Numerical and Experimental Investigation on the Optical Manipulation from an Axicon Lensed Fiber. Micromachines. 2021; 12(2):187. https://doi.org/10.3390/mi12020187
Chicago/Turabian StyleZhang, Wu, Yanxiao Lin, Yusong Gao, Zekai Guo, Xiangling Li, Yuhong Hu, Pengcai Dong, Qifan Zhang, Xiaohui Fang, and Meng Zhang. 2021. "Numerical and Experimental Investigation on the Optical Manipulation from an Axicon Lensed Fiber" Micromachines 12, no. 2: 187. https://doi.org/10.3390/mi12020187
APA StyleZhang, W., Lin, Y., Gao, Y., Guo, Z., Li, X., Hu, Y., Dong, P., Zhang, Q., Fang, X., & Zhang, M. (2021). Numerical and Experimental Investigation on the Optical Manipulation from an Axicon Lensed Fiber. Micromachines, 12(2), 187. https://doi.org/10.3390/mi12020187