
Modeling of a Rope-Driven Piezoelectric Vibration Energy Harvester for Low-Frequency and Wideband Energy Harvesting



Abstract
:1. Introduction
- (a)
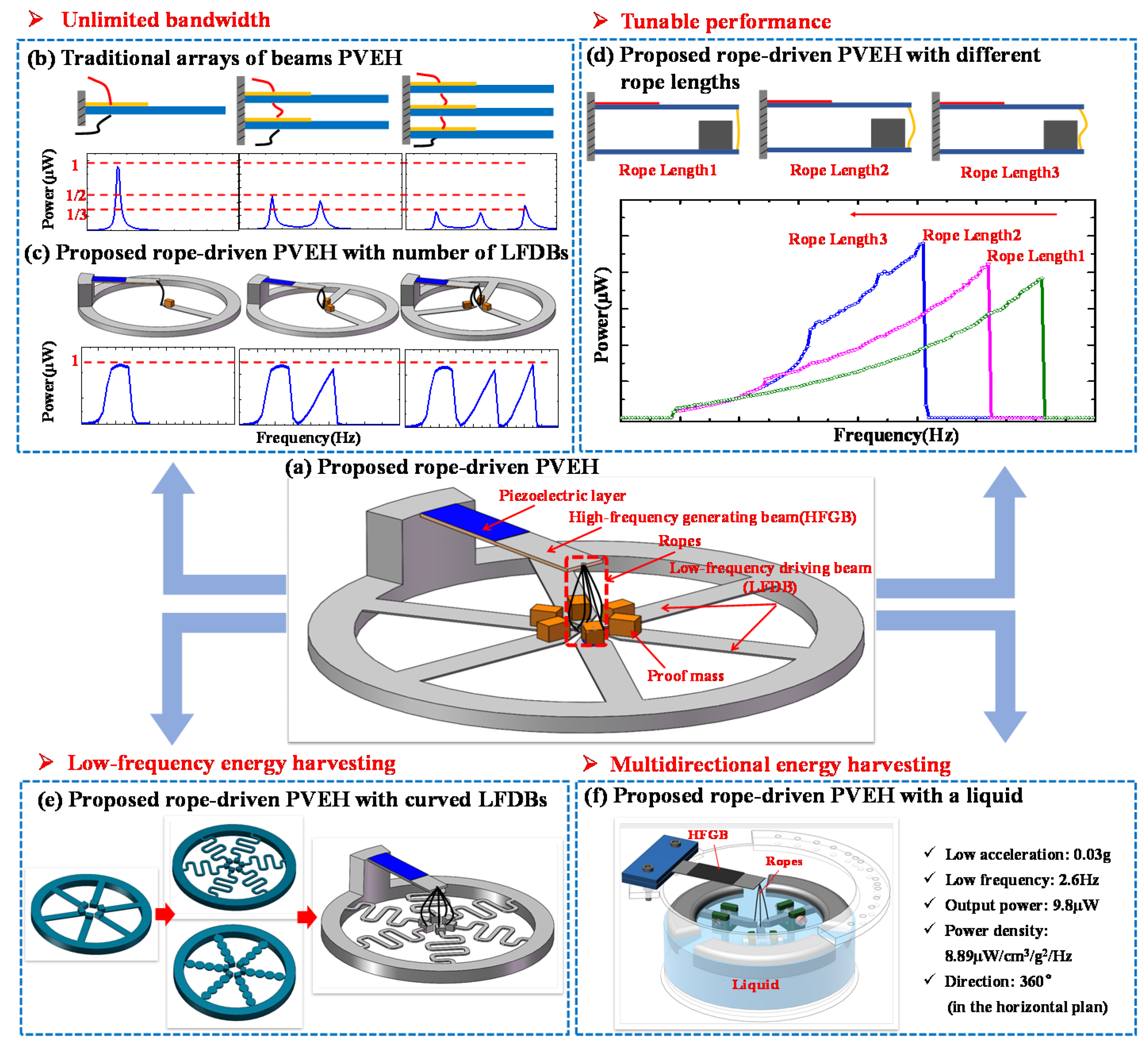
- Wider or even unlimited bandwidth could be achieved if the number of LFDBs are continuously increased. Unlike wideband PVEH based on an array piezoelectric beams in serial/parallel connection, the output performance of proposed PVEH will not deteriorate with the changing number of LFDBs, which has theoretically and experimentally been proved, and Figure 1b,c show a typical experimental result [57].
- (b)
- Similar to the impact-driven FUC wideband PVEH using a stopper, when an individual LFDB pulls the HFGB to oscillate it can achieve wideband energy harvesting, named as rope-driven FUC mechanism. Additionally, impact and rope-driven FUC mechanism can occur in the proposed PVEH by properly setting the length of rope, thus a much wider bandwidth could be achieved compared with the conventional impact-based FUC nonlinear wideband PVEH. Moreover, the working frequency of proposed PVEH can be tuned without re-fabricating or damaging the original structure by simply changing the rope length, which is ultra-convenient for practical applications. All these features of proposed PVEH has been experimentally verified, as shown in Figure 1d [58].
- (c)
- Only HFGB is used for output in the proposed PVEH, which does not require a piezoelectric layer on LFDB, allowing great flexibility on the structure design of LFDB for various applications. For example, LFDB can adopted a curved shape shown in Figure 1e, which makes it easy to achieve low-frequency energy harvesting in a vibration environment, such as human motion, engine vibration, moving vehicles, and wave motion. Moreover, ultralow frequency, low intensity, and multidirectional vibration energy harvesting in a horizontal plane can be achieved if a liquid-based system is used as LFDB (see Figure 1f), which is difficult to be realized with traditional PVEHs [59].
2. Modeling
3. Experiment and Simulation Procedure
4. Results and Discussion
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Guan, M.J.; Liao, W.H. On the efficiencies of piezoelectric energy harvesting circuits towards storage device voltages. Smart Mater. Struct. 2007, 16, 498–505. [Google Scholar] [CrossRef]
- Jiang, L.; Yang, Y.; Chen, R.; Lu, G.; Li, R.; Xing, J.; Shung, K.K.; Humayun, M.S.; Zhu, J.; Chen, Y.; et al. Ultrasound-Induced Wireless Energy Harvesting for Potential Retinal Electrical Stimulation Application. Adv. Funct. Mater. 2019, 29, 1–13. [Google Scholar] [CrossRef]
- Yang, Y.; Hu, H.; Chen, Z.; Wang, Z.; Jiang, L.; Lu, G.; Li, X.; Chen, R.; Jin, J.; Kang, H.; et al. Stretchable Nanolayered Thermoelectric Energy Harvester on Complex and Dynamic Surfaces. Nano Lett. 2020, 20, 4445–4453. [Google Scholar] [CrossRef] [PubMed]
- Sardini, E.; Serpelloni, M. An efficient electromagnetic power harvesting device for low-frequency applications. Sens. Actuators A Phys. 2011, 172, 475–482. [Google Scholar] [CrossRef]
- Halim, M.A.; Park, J.Y. Modeling and experiment of a handy motion driven, frequency up-converting electromagnetic energy harvester using transverse impact by spherical ball. Sens. Actuators A Phys. 2015, 229, 50–58. [Google Scholar] [CrossRef]
- Foisal, A.R.M.; Hong, C.; Chung, G.-S. Multi-frequency electromagnetic energy harvester using a magnetic spring cantilever. Sens. Actuators A Phys. 2012, 182, 106–113. [Google Scholar] [CrossRef]
- Zhang, Y.; Wang, T.; Luo, A.; Hu, Y.; Li, X.; Wang, F. Micro electrostatic energy harvester with both broad bandwidth and high normalized power density. Appl. Energy 2018, 212, 362–371. [Google Scholar] [CrossRef]
- Boisseau, S.; Despesse, G.; Ricart, T.; Defay, E.; Sylvestre, A. Cantilever-based electret energy harvesters. Smart Mater. Struct. 2011, 20, 105013–105023. [Google Scholar] [CrossRef]
- Tao, K.; Lye, S.W.; Miao, J.; Tang, L.; Hu, X. Out-of-plane electret-based MEMS energy harvester with the combined nonlinear effect from electrostatic force and a mechanical elastic stopper. J. Micromech. Microeng. 2015, 25, 104014–104024. [Google Scholar] [CrossRef]
- Jung, I.; Shin, Y.H.; Kim, S.; Choi, J.Y.; Kang, C.Y. Flexible piezoelectric polymer-based energy harvesting system for roadway applications. Appl. Energy 2017, 197, 222–229. [Google Scholar] [CrossRef]
- Liu, H.; Lee, C.; Kobayashi, T.; Tay, C.J.; Quan, C. Piezoelectric MEMS-based wideband energy harvesting systems using a frequency-up-conversion cantilever stopper. Sens. Actuators A Phys. 2012, 186, 242–248. [Google Scholar] [CrossRef]
- Liu, S.; Cheng, Q.; Zhao, D.; Feng, L. Theoretical modeling and analysis of two-degree-of-freedom piezoelectric energy harvester with stopper. Sens. Actuators A Phys. 2016, 245, 97–105. [Google Scholar] [CrossRef]
- Zeng, Y.; Jiang, L.; Sun, Y.; Yang, Y.; Quan, Y.; Wei, S.; Lu, G.; Li, R.; Rong, J.; Chen, Y.; et al. 3D-printing piezoelectric composite with honeycomb structure for ultrasonic devices. Micromachines 2020, 11, 713. [Google Scholar] [CrossRef] [PubMed]
- Ma, Z.; Ai, J.; Shi, Y.; Wang, K.; Su, B. A Superhydrophobic Droplet-Based Magnetoelectric Hybrid System to Generate Electricity and Collect Water Simultaneously. Adv. Mater. 2020, 1–9. [Google Scholar] [CrossRef]
- Cheng, T.; Gao, Q.; Wang, Z.L. The Current Development and Future Outlook of Triboelectric Nanogenerators: A Survey of Literature. Adv. Mater. Technol. 2019, 1–7. [Google Scholar] [CrossRef]
- Wang, Z.L. Triboelectric nanogenerators as new energy technology and self-powered sensors - Principles, problems and perspectives. Faraday Discuss. 2014, 176, 447–458. [Google Scholar] [CrossRef] [PubMed]
- Wang, Y.; Yang, Y.; Wang, Z.L. Triboelectric nanogenerators as flexible power sources. NPJ Flex. Electron. 2017, 1, 1–10. [Google Scholar] [CrossRef] [Green Version]
- Saadon, S.; Sidek, O. A review of vibration-based MEMS piezoelectric energy harvesters. Energy Convers. Manag. 2011, 52, 500–504. [Google Scholar] [CrossRef]
- Wang, L.; Wang, Z.L. Advances in piezotronic transistors and piezotronics. Nano Today 2021, 37, 101108. [Google Scholar] [CrossRef]
- Karan, S.K.; Maiti, S.; Lee, J.H.; Mishra, Y.K.; Khatua, B.B.; Kim, J.K. Recent Advances in Self-Powered Tribo-/Piezoelectric Energy Harvesters: All-In-One Package for Future Smart Technologies. Adv. Funct. Mater. 2020, 30, 1–52. [Google Scholar] [CrossRef]
- Kuang, Y.; Ruan, T.; Chew, Z.J.; Zhu, M. Energy harvesting during human walking to power a wireless sensor node. Sens. Actuators A Phys. 2017, 254, 69–77. [Google Scholar] [CrossRef]
- Jeon, Y.B.; Sood, R.; Jeong, J.H.; Kim, S.G. MEMS power generator with transverse mode thin film PZT. Sens. Actuators A Phys. 2005, 122, 16–22. [Google Scholar] [CrossRef]
- Renaud, M.; Sterken, T.; Schmitz, A.; Fiorini, P.; Van Hoof, C.; Puers, R. Piezoelectric harvesters and MEMS technology: Fabrication, modeling and measurements. In Proceedings of the Solid-State Sensors, Actuators & Microsystems Conference, Transducers International, Lyon, France, 10–14 June 2007; pp. 891–894. [Google Scholar]
- Shen, D.; Park, J.; Ajitsaria, J.; Choe, S.; Iii, H.C.W.; Kim, D. The design, fabrication and evaluation of a MEMS PZT cantilever with an integrated Si proof mass for vibration energy harvesting. J. Microelectromech. Syst. 2008, 18, 055017. [Google Scholar] [CrossRef]
- Muralt, P.; Marzencki, M.; Belgacem, B.; Calame, F.; Basrour, S. Vibration Energy Harvesting with PZT Micro Device. Procedia Chem. 2009, 1, 1191–1194. [Google Scholar] [CrossRef] [Green Version]
- Elfrink, R.; Renaud, M.; Kamel, T.M.; De Nooijer, C.; Jambunathan, M.; Goedbloed, M.; Hohlfeld, D.; Matova, S.; Pop, V.; Caballero, L.; et al. Vacuum-packaged piezoelectric vibration energy harvesters: Damping contributions. J. Micromech. Microeng. 2010, 20, 104001. [Google Scholar] [CrossRef]
- Park, J.C.; Member, S.; Park, J.Y.; Lee, Y. Modeling and Characterization of Piezoelectric d33 Mode MEMS Energy Harvester. J. Microelectromech. Syst. 2010, 19, 1215–1222. [Google Scholar] [CrossRef]
- Fang, H.B.; Liu, J.Q.; Xu, Z.Y.; Dong, L.; Wang, L.; Chen, D.; Cai, B.C.; Liu, Y. Fabrication and performance of MEMS-based piezoelectric power generator for vibration energy harvesting. Microelectron. J. 2006, 37, 1280–1284. [Google Scholar] [CrossRef]
- Kanno, I.; Ichida, T.; Adachi, K.; Kotera, H.; Shibata, K. Power-generation performance of lead-free (K,Na)NbO3 piezoelectric thin-film energy harvesters. Sens. Actuators A Phys. 2012, 179, 132–136. [Google Scholar] [CrossRef]
- Roundy, S.; Wright, P.K.; Rabaey, J. A study of low level vibrations as a power source for wireless sensor nodes. Comput. Commun. 2003, 26, 1131–1144. [Google Scholar] [CrossRef]
- Li, H.; Tian, C.; Deng, Z.D.; Li, H.; Tian, C.; Deng, Z.D. Energy harvesting from low frequency applications using piezoelectric materials. Appl. Phys. Rev. 2014, 1, 041301. [Google Scholar] [CrossRef] [Green Version]
- Leland, E.S.; Wright, P.K. Resonance tuning of piezoelectric vibration energy scavenging generators using compressive axial preload. Smart Mater. Struct. 2006, 15, 1413–1420. [Google Scholar] [CrossRef]
- Eichhorn, C.; Goldschmidtboeing, F.; Woias, P. Bidirectional frequency tuning of a piezoelectric energy converter based on a cantilever beam. J. Micromech. Microeng. 2009, 19. [Google Scholar] [CrossRef]
- Liu, H.; Fu, H.; Sun, L.; Lee, C.; Yeatman, E.M. Hybrid energy harvesting technology: From materials, structural design, system integration to applications. Renew. Sustain. Energy Rev. 2020, 137, 1–25. [Google Scholar] [CrossRef]
- Tran, N.; Ghayesh, M.H.; Arjomandi, M. Ambient vibration energy harvesters: A review on nonlinear techniques for performance enhancement. Int. J. Eng. Sci. 2018, 127, 162–185. [Google Scholar] [CrossRef]
- Daqaq, M.F.; Masana, R.; Erturk, A.; Dane Quinn, D. On the Role of Nonlinearities in Vibratory Energy Harvesting: A Critical Review and Discussion. Appl. Mech. Rev. 2014, 66, 040801. [Google Scholar] [CrossRef]
- Xue, H.; Hu, Y.; Wang, Q.M. Broadband piezoelectric energy harvesting devices using multiple bimorphs with different operating frequencies. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2008, 55, 2104–2108. [Google Scholar] [CrossRef]
- Liu, J.Q.; Fang, H.B.; Xu, Z.Y.; Mao, X.H.; Shen, X.C.; Chen, D.; Liao, H.; Cai, B.C. A MEMS-based piezoelectric power generator array for vibration energy harvesting. Microelectron. J. 2008, 39, 802–806. [Google Scholar] [CrossRef]
- Li, X.; Upadrashta, D.; Yu, K.; Yang, Y. Analytical modeling and validation of multi-mode piezoelectric energy harvester. Mech. Syst. Signal Process. 2019, 124, 613–631. [Google Scholar] [CrossRef]
- Wu, M.; Ou, Y.; Mao, H.; Li, Z.; Liu, R.; Ming, A.; Ou, W. Multi-resonant wideband energy harvester based on a folded asymmetric M-shaped cantilever. AIP Adv. 2015, 104, 077149. [Google Scholar] [CrossRef]
- Zhou, S.; Zuo, L. Nonlinear dynamic analysis of asymmetric tristable energy harvesters for enhanced energy harvesting. Commun. Nonlinear Sci. Numer. Simulat. 2018, 61, 271–284. [Google Scholar] [CrossRef]
- Tang, L.; Yang, Y.; Soh, C.K. Toward Broadband Vibration-based Energy Harvesting. J. Intell. Mater. Syst. Struct. 2010, 21, 1867–1897. [Google Scholar] [CrossRef]
- Halim, M.A.; Park, J.Y. Theoretical modeling and analysis of mechanical impact driven and frequency up-converted piezoelectric energy harvester for low-frequency and wide-bandwidth operation. Sens. Actuators A Phys. 2014, 208, 56–65. [Google Scholar] [CrossRef]
- Zhou, S.; Cao, J.; Inman, D.J.; Lin, J.; Li, D. Harmonic balance analysis of nonlinear tristable energy harvesters for performance enhancement. J. Sound Vib. 2016, 373, 223–235. [Google Scholar] [CrossRef]
- Liu, H.; Lee, C.; Kobayashi, T.; Tay, C.J.; Quan, C. Investigation of a MEMS piezoelectric energy harvester system with a frequency-widened-bandwidth mechanism introduced by mechanical stoppers. Smart Mater. Struct. 2012, 21. [Google Scholar] [CrossRef]
- Halim, M.A.; Khym, S.; Park, J.Y. Frequency up-converted wide bandwidth piezoelectric energy harvester using mechanical impact. J. Appl. Phys. 2013, 114, 044902. [Google Scholar] [CrossRef]
- Gu, L.; Livermore, C. Impact-driven, frequency up-converting coupled vibration energy harvesting device for low frequency operation. Smart Mater. Struct. 2011, 20, 45004. [Google Scholar] [CrossRef]
- Halim, M.A.; Park, J.Y. Piezoceramic based wideband energy harvester using impact-enhanced dynamic magnifier for low frequency vibration. Ceram. Int. 2015, 41, S702–S707. [Google Scholar] [CrossRef]
- Vijayan, K.; Friswell, M.I.; Haddad Khodaparast, H.; Adhikari, S. Non-linear energy harvesting from coupled impacting beams. Int. J. Mech. Sci. 2015, 96–97, 101–109. [Google Scholar] [CrossRef] [Green Version]
- Wickenheiser, A.M.; Garcia, E. Broadband vibration-based energy harvesting improvement through frequency up-conversion by magnetic excitation. Smart Mater. Struct. 2010, 19, 1–11. [Google Scholar] [CrossRef]
- Tang, Q.; Li, X. Two-stage wideband energy harvester driven by multimode coupled vibration. IEEE/ASME Trans. Mechatron. 2015, 20, 115–121. [Google Scholar] [CrossRef]
- Tang, Q.C.; Yang, Y.L.; Li, X. Bi-stable frequency up-conversion piezoelectric energy harvester driven by non-contact magnetic repulsion. Smart Mater. Struct. 2011, 20, 1–6. [Google Scholar] [CrossRef]
- Külah, H.; Najafi, K. Energy scavenging from low-frequency vibrations by using frequency up-conversion for wireless sensor applications. IEEE Sens. J. 2008, 8, 261–268. [Google Scholar] [CrossRef]
- Wang, C.; Zhang, Q.; Wang, W.; Feng, J. A low-frequency, wideband quad-stable energy harvester using combined nonlinearity and frequency up-conversion by cantilever-surface contact. Mech. Syst. Signal Process. 2018, 112, 305–318. [Google Scholar] [CrossRef]
- Zhou, S.; Cao, J.; Inman, D.J.; Lin, J.; Liu, S.; Wang, Z. Broadband tristable energy harvester: Modeling and experiment verification. Appl. Energy 2014, 133, 33–39. [Google Scholar] [CrossRef]
- Izadgoshasb, I.; Lim, Y.Y.; Tang, L.; Padilla, R.V.; Tang, Z.S.; Sedighi, M. Improving efficiency of piezoelectric based energy harvesting from human motions using double pendulum system. Energy Convers. Manag. 2019, 184, 559–570. [Google Scholar] [CrossRef]
- Zhang, J.; Kong, L.; Zhang, L.; Li, F.; Zhou, W.; Ma, S.; Qin, L. A Novel Ropes-Driven Wideband Piezoelectric Vibration Energy Harvester. Appl. Sci. 2016, 6, 402. [Google Scholar] [CrossRef] [Green Version]
- Zhang, J.; Qin, L. A tunable frequency up-conversion wideband piezoelectric vibration energy harvester for low-frequency variable environment using a novel impact- and rope-driven hybrid mechanism. Appl. Energy 2019, 240, 26–34. [Google Scholar] [CrossRef]
- Yang, F.; Zhang, J.; Lin, M.; Ouyang, S.; Qin, L. An ultralow frequency, low intensity, and multidirectional piezoelectric vibration energy harvester using liquid as energy-capturing medium. Appl. Phys. Lett. 2020, 117, 173901. [Google Scholar] [CrossRef]
- Chengliang, S.; Lifeng, Q.; Fang, L.; Wang, Q.M. Piezoelectric Energy Harvesting using Single Crystal Pb(Mg1/3Nb2/3)O3-xPbTiO3 (PMN-PT) Device. J. Intell. Mater. Syst. Struct. 2008, 20, 559–568. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| References | Effective Volume (mm3) | Power (µW) | Acceleration (g) | Frequency (Hz) |
|---|---|---|---|---|
| Jeon et al. [22] | 0.027 | 1.01 | 10.8 | 13,900 |
| Renaud et al. [23] | 1.845 | 40 | 1.9 | 1800 |
| Shen et al. [24] | 0.6520 | 2.15 | 2.0 | 462.5 |
| Muralt et al. [25] | 0.48 | 1.4 | 2.0 | 870 |
| Elfrink et al. [26] | 15 | 69 | 0.2 | 599 |
| Park et al. [27] | 1.05 | 1.1 | 0.39 | 528 |
| Fang et al. [28] | 0.78 | 2.16 | 1.0 | 608 |
| Kanno.et al. [29] | 0.168 | 1.1 | 1.0 | 1036 |
| Vibration Sources | Acceleration (g) | Frequency (Hz) |
|---|---|---|
| Vanitation pipe | 0.02–0.15 | 60 |
| Lathe | 1.0 | 70 |
| Truck/Car engine | 0.052–0.198 | 37 |
| Human walking | 0.2–0.3 | 2–3 |
| Car instrument panel | 0.3 | 13 |
| Three-axis machine | 1.0 | 70 |
| Office building near the road | 0.02–0.15 | 60–100 |
| Tunnel train secondary vibration | 0.0026 | 15–25 |
| Parameters | LFDB | HFGB | Rope |
|---|---|---|---|
| Length (mm) | 24.32 | 19.51 | 18.7 |
| Width (mm) | 6.00 | 6.00 | - |
| Thickness (mm) | 0.28 | 0.28 | - |
| Diameter (mm) | - | - | 0.1 |
| Proof mass (g) | 1.93 | 0.00 | - |
| Frequency (Hz) | 63.7 | 410.3 | - |
| Young modulus (Gpa) | 90 | 90 | 2.7 |
| Density(kg/m3) | 8800 | 8800 | - |
| Damping ratio | 2.56 × 10−3 | 5.79 × 10−3 | - |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, J.; Lin, M.; Zhou, W.; Luo, T.; Qin, L. Modeling of a Rope-Driven Piezoelectric Vibration Energy Harvester for Low-Frequency and Wideband Energy Harvesting. Micromachines 2021, 12, 305. https://doi.org/10.3390/mi12030305
Zhang J, Lin M, Zhou W, Luo T, Qin L. Modeling of a Rope-Driven Piezoelectric Vibration Energy Harvester for Low-Frequency and Wideband Energy Harvesting. Micromachines. 2021; 12(3):305. https://doi.org/10.3390/mi12030305
Chicago/Turabian StyleZhang, Jinhui, Maoyu Lin, Wei Zhou, Tao Luo, and Lifeng Qin. 2021. "Modeling of a Rope-Driven Piezoelectric Vibration Energy Harvester for Low-Frequency and Wideband Energy Harvesting" Micromachines 12, no. 3: 305. https://doi.org/10.3390/mi12030305
APA StyleZhang, J., Lin, M., Zhou, W., Luo, T., & Qin, L. (2021). Modeling of a Rope-Driven Piezoelectric Vibration Energy Harvester for Low-Frequency and Wideband Energy Harvesting. Micromachines, 12(3), 305. https://doi.org/10.3390/mi12030305