
Modelling of Electrowetting-Induced Droplet Detachment and Jumping over Topographically Micro-Structured Surfaces


Abstract
:1. Introduction
2. Materials and Methods
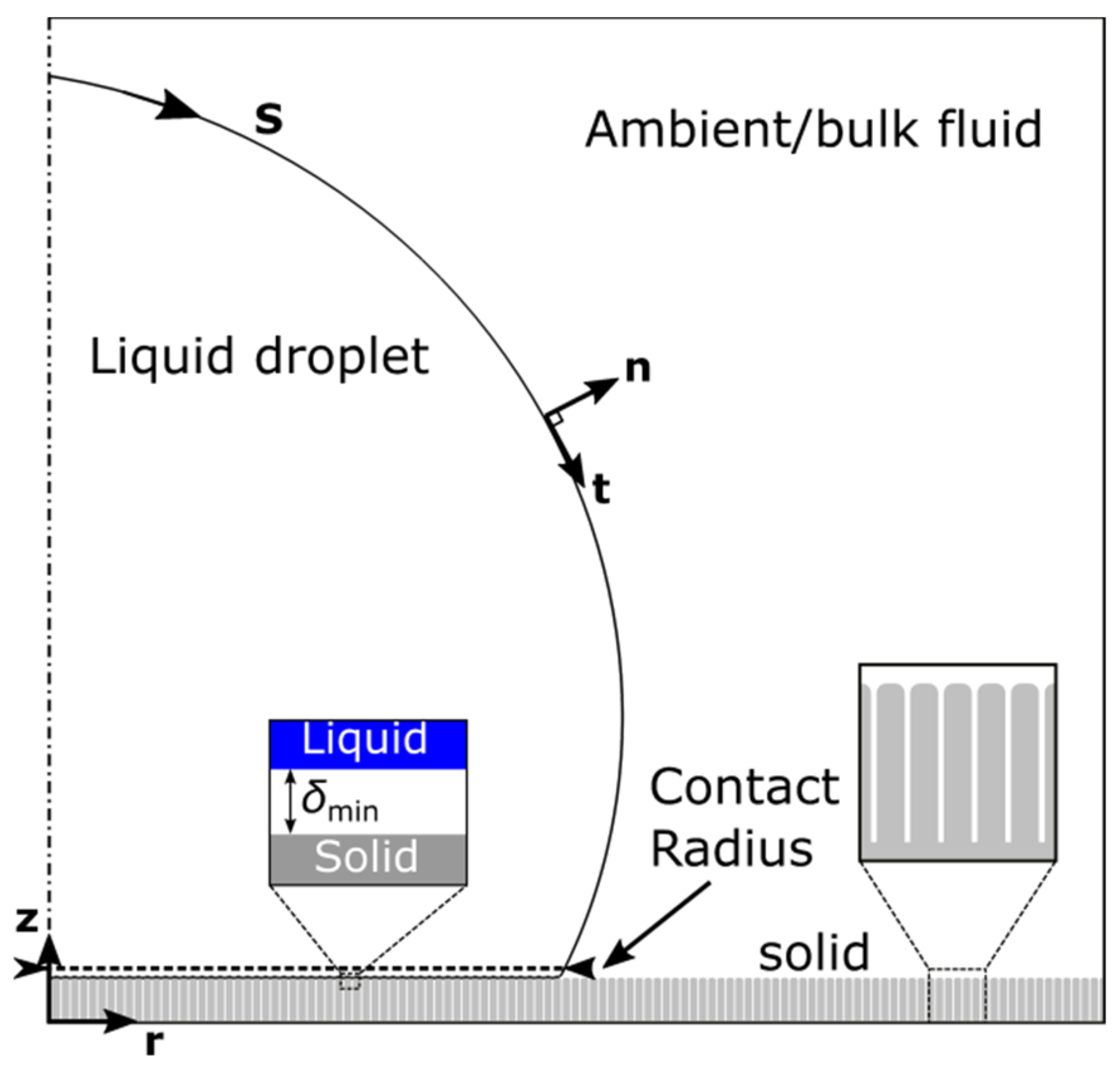
2.1. Hydrodynamic Model
2.2. Energy Calculations
3. Results and Discussion
3.1. Validation of Computational Model
3.2. Micro-Structured Surfaces
4. Conclusions
Supplementary Materials
Author Contributions
Funding
Conflicts of Interest
References
- Yager, P.; Edwards, T.; Fu, E.; Helton, K.; Nelson, K.; Tam, M.R.; Weigl, B.H. Microfluidic Diagnostic Technologies for Global Public Health. Nature 2006, 442, 412–418. [Google Scholar] [CrossRef]
- Zhu, P.; Wang, L. Passive and Active Droplet Generation with Microfluidics: A Review. Lab Chip 2016, 17, 34–75. [Google Scholar] [CrossRef] [PubMed]
- Nguyen, N.-T.; Wereley, S.; Shaegh, S.A.M. Fundamentals and Applications of Microfluidics, 3rd ed.; Artech House: Norwood, MA, USA, 2019; ISBN 978-1-63081-364-2. [Google Scholar]
- Zhang, K.; Li, Z.; Maxey, M.; Chen, S.; Karniadakis, G.E. Self-Cleaning of Hydrophobic Rough Surfaces by Coalescence-Induced Wetting Transition. Langmuir 2019, 35, 2431–2442. [Google Scholar] [CrossRef] [Green Version]
- Rykaczewski, K.; Scott, J.H.J.; Rajauria, S.; Chinn, J.; Chinn, A.M.; Jones, W. Three Dimensional Aspects of Droplet Coalescence during Dropwise Condensation on Superhydrophobic Surfaces. Soft Matter 2011, 7, 8749–8752. [Google Scholar] [CrossRef]
- Boreyko, J.B.; Chen, C.-H. Vapor Chambers with Jumping-Drop Liquid Return from Superhydrophobic Condensers. Int. J. Heat Mass Transf. 2013, 61, 409–418. [Google Scholar] [CrossRef]
- Foulkes, T.; Sett, S.; Sokalski, P.; Oh, J.; Miljkovic, N. Fundamental Limits of Jumping Droplet Heat Transfer. Appl. Phys. Lett. 2020, 116, 93701. [Google Scholar] [CrossRef]
- Zamuruyev, K.O.; Bardaweel, H.K.; Carron, C.J.; Kenyon, N.J.; Brand, O.; Delplanque, J.-P.; Davis, C.E. Continuous Droplet Removal upon Dropwise Condensation of Humid Air on a Hydrophobic Micropatterned Surface. Langmuir 2014, 30, 10133–10142. [Google Scholar] [CrossRef] [Green Version]
- Edalatpour, M.; Liu, L.; Jacobi, A.M.; Eid, K.F.; Sommers, A.D. Managing Water on Heat Transfer Surfaces: A Critical Review of Techniques to Modify Surface Wettability for Applications with Condensation or Evaporation. Appl. Energy 2018, 222, 967–992. [Google Scholar] [CrossRef]
- Hao, P.; Lv, C.; Yao, Z. Droplet Detachment by Air Flow for Microstructured Superhydrophobic Surfaces. Langmuir 2013, 29, 5160–5166. [Google Scholar] [CrossRef]
- Carroll, B.; Hidrovo, C. Droplet Detachment Mechanism in a High-Speed Gaseous Microflow. J. Fluids Eng. 2013, 135. [Google Scholar] [CrossRef]
- Wasan, D.T.; Nikolov, A.D. Spreading of Nanofluids on Solids. Nature 2003, 423, 156–159. [Google Scholar] [CrossRef]
- Jun Lee, S.; Lee, S.; Hyoung Kang, K. Droplet Jumping by Electrowetting and Its Application to the Three-Dimensional Digital Microfluidics. Appl. Phys. Lett. 2012, 100, 81604. [Google Scholar] [CrossRef] [Green Version]
- Lapierre, F.; Coffinier, Y.; Boukherroub, R.; Thomy, V. Electro-(de)Wetting on Superhydrophobic Surfaces. Langmuir 2013, 29, 13346–13351. [Google Scholar] [CrossRef]
- Lee, S.J.; Hong, J.; Kang, K.H.; Kang, I.S.; Lee, S.J. Electrowetting-Induced Droplet Detachment from Hydrophobic Surfaces. Langmuir 2014, 30, 1805–1811. [Google Scholar] [CrossRef]
- Wang, Q.; Xu, M.; Wang, C.; Gu, J.; Hu, N.; Lyu, J.; Yao, W. Actuation of a Nonconductive Droplet in an Aqueous Fluid by Reversed Electrowetting Effect. Langmuir 2020, 36, 8152–8164. [Google Scholar] [CrossRef] [PubMed]
- Weng, N.; Wang, Q.; Gu, J.; Li, J.; Wang, C.; Yao, W. The Dynamics of Droplet Detachment in Reversed Electrowetting (REW). Colloids Surf. A Physicochem. Eng. Asp. 2021, 616, 126303. [Google Scholar] [CrossRef]
- Cavalli, A.; Preston, D.J.; Tio, E.; Martin, D.W.; Miljkovic, N.; Wang, E.N.; Blanchette, F.; Bush, J.W.M. Electrically Induced Drop Detachment and Ejection. Phys. Fluids 2016, 28, 22101. [Google Scholar] [CrossRef] [Green Version]
- Ashoke Raman, K.; Jaiman, R.K.; Lee, T.-S.; Low, H.-T. A Numerical Study on Electrowetting-Induced Jumping and Transport of Droplet. Int. J. Heat Mass Transf. 2016, 99, 805–821. [Google Scholar] [CrossRef]
- Islam, M.A.; Tong, A.Y. A Numerical Study on Electrowetting-Induced Droplet Detachment from Hydrophobic Surface. J. Heat Transf. 2018, 140. [Google Scholar] [CrossRef]
- Merdasi, A.; Moosavi, A.; Shafii, M.B. Electrowetting-Induced Droplet Jumping over Topographically Structured Surfaces. Mater. Res. Express 2019, 6, 86333. [Google Scholar] [CrossRef]
- Cox, R.G. The Dynamics of the Spreading of Liquids on a Solid Surface. Part 1. Viscous Flow. J. Fluid Mech. 1986, 168, 169–194. [Google Scholar] [CrossRef]
- Karapetsas, G.; Chamakos, N.T.; Papathanasiou, A.G. Efficient Modelling of Droplet Dynamics on Complex Surfaces. J. Phys. Condens. Matter 2016, 28, 85101. [Google Scholar] [CrossRef]
- Chamakos, N.T.; Kavousanakis, M.E.; Boudouvis, A.G.; Papathanasiou, A.G. Droplet Spreading on Rough Surfaces: Tackling the Contact Line Boundary Condition. Phys. Fluids 2016, 28, 22105. [Google Scholar] [CrossRef]
- Chamakos, N.T.; Sema, D.G.; Papathanasiou, A.G. Progress in Modeling Wetting Phenomena on Structured Substrates. Arch. Computat. Methods Eng. 2020. [Google Scholar] [CrossRef]
- Chamakos, N.T.; Sema, D.G.; Papathanasiou, A.G. Highlighting the Role of Dielectric Thickness and Surface Topography on Electrospreading Dynamics. Micromachines 2019, 10, 93. [Google Scholar] [CrossRef] [Green Version]
- Deen, W.M. Analysis of Transport Phenomena; Oxford University Press: New York, NY, USA, 1998; ISBN 978-0-19-508494-8. [Google Scholar]
- Schrader, M.E. Young-Dupre Revisited. Langmuir 1995, 11, 3585–3589. [Google Scholar] [CrossRef]
- Bormashenko, E.; Bormashenko, Y. Wetting of Composite Surfaces: When and Why Is the Area Far from The Triple Line Important? J. Phys. Chem. C 2013, 117, 19552–19557. [Google Scholar] [CrossRef]
- Kavousanakis, M.E.; Chamakos, N.T.; Papathanasiou, A.G. Connection of Intrinsic Wettability and Surface Topography with the Apparent Wetting Behavior and Adhesion Properties. J. Phys. Chem. C 2015, 119, 15056–15066. [Google Scholar] [CrossRef]
- Warsi, Z.U.A. Fluid Dynamics: Theoretical and Computational Approaches, 2nd ed.; CRC Press: Boca Raton, FL, USA, 1998; ISBN 978-0-8493-2407-9. [Google Scholar]
- Deng, X.; Mammen, L.; Butt, H.-J.; Vollmer, D. Candle Soot as a Template for a Transparent Robust Superamphiphobic Coating. Science 2012, 335, 67–70. [Google Scholar] [CrossRef] [PubMed]
- Kavousanakis, M.E.; Chamakos, N.T.; Ellinas, K.; Tserepi, A.; Gogolides, E.; Papathanasiou, A.G. How to Achieve Reversible Electrowetting on Superhydrophobic Surfaces. Langmuir 2018, 34, 4173–4179. [Google Scholar] [CrossRef]
- Papathanasiou, A.G. Progress toward Reversible Electrowetting on Geometrically Patterned Superhydrophobic Surfaces. Curr. Opin. Colloid Interface Sci. 2018, 36, 70–77. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Flat | Stripes I | Stripes II | |
|---|---|---|---|
| Voltage ON | |||
| Voltage OFF | |||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sourais, A.G.; Papathanasiou, A.G. Modelling of Electrowetting-Induced Droplet Detachment and Jumping over Topographically Micro-Structured Surfaces. Micromachines 2021, 12, 592. https://doi.org/10.3390/mi12060592
Sourais AG, Papathanasiou AG. Modelling of Electrowetting-Induced Droplet Detachment and Jumping over Topographically Micro-Structured Surfaces. Micromachines. 2021; 12(6):592. https://doi.org/10.3390/mi12060592
Chicago/Turabian StyleSourais, Alexandros G., and Athanasios G. Papathanasiou. 2021. "Modelling of Electrowetting-Induced Droplet Detachment and Jumping over Topographically Micro-Structured Surfaces" Micromachines 12, no. 6: 592. https://doi.org/10.3390/mi12060592
APA StyleSourais, A. G., & Papathanasiou, A. G. (2021). Modelling of Electrowetting-Induced Droplet Detachment and Jumping over Topographically Micro-Structured Surfaces. Micromachines, 12(6), 592. https://doi.org/10.3390/mi12060592