
Fractional-Order Approximation of PID Controller for Buck–Boost Converters

 ,
, 
 and
and 
Abstract
:1. Introduction
2. Materials and Methods
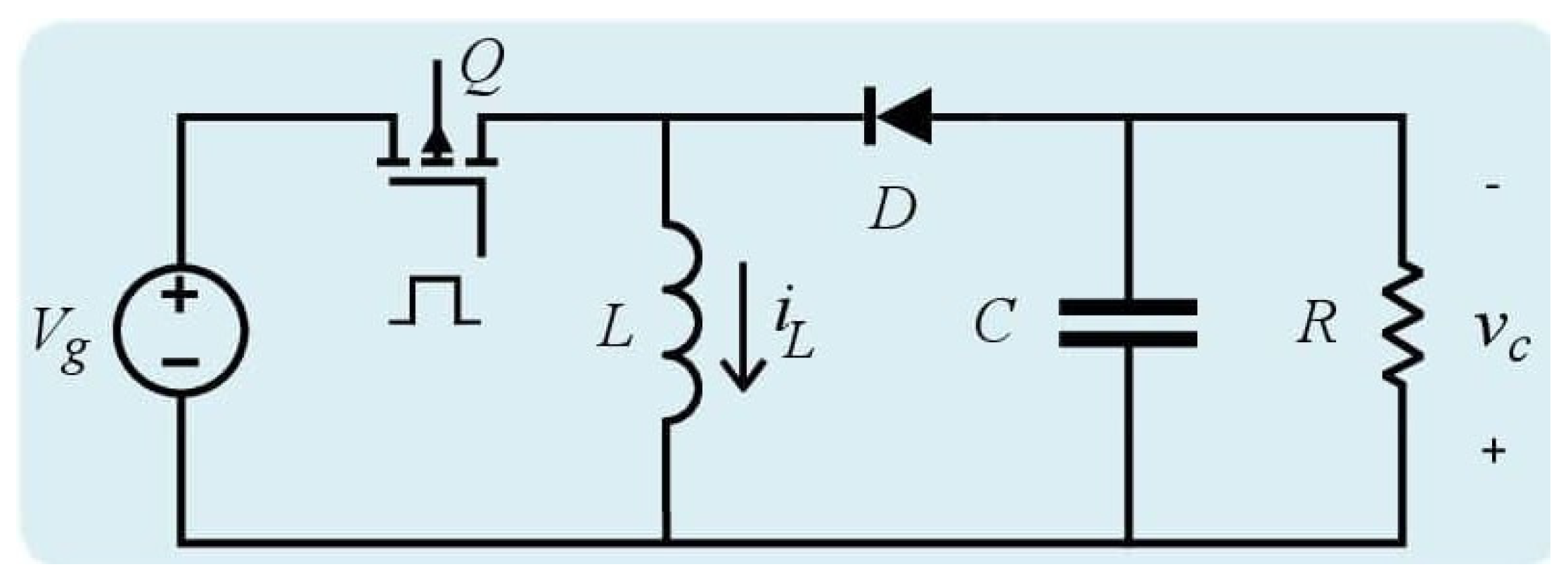
2.1. Buck–Boost Converter Model
2.2. Fractional-Order Approximation of Laplacian Operator
2.3. Synthesis of Fractional-Order PID Approximation
3. Results
3.1. Control Design and Numerical Results
- Consider buck–boost converter transfer function divided into minimum and non-minimum phase parts.
- Think on the minimum phase transfer function as the plant to be controlled.
- Determine uncontrolled plant phase and the phase margin .
- Compute the required controller fractional-order through (15).
- Compute fractional-order approximation through (9).
- Generate controller structure as a function of integral time constant and gain .
- Determine and values that produce the required effect.
- Determine regulation/tracking performance of the closed-loop response.
3.2. Generalization of Controller for the Implementation
4. Discussion
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Kuwahara, K.; Asadi, F.; Ishibashi, T.; Eguchi, K. The Development of an LED Lighting Circuit Using High Gain Buck-Boost Converters. Int. J. Electr. Electron. Eng. Telecommun. 2019, 8, 262–267. [Google Scholar] [CrossRef]
- Ado, M.; BinArif, M.S.; Jusoh, A.; Mutawakkil, A.U.; Danmallam, I.M. Buck-boost converter with simple gate control for renewable energy applications. Energy Sources Part A Recover. Util. Environ. Eff. 2020, 1–13. [Google Scholar] [CrossRef]
- Rajavel, A.; Rathina Prabha, N. Fuzzy logic controller-based boost and buck-boost converter for maximum power point tracking in solar system. Trans. Inst. Meas. Control. 2020, 43, 945–957. [Google Scholar] [CrossRef]
- Gheisarnejad, M.; Farsizadeh, H.; Tavana, M.R.; Khooban, M.H. A Novel Deep Learning Controller for DC/DC Buck-Boost Converters in Wireless Power Transfer Feeding CPLs. IEEE Trans. Ind. Electron. 2020. [Google Scholar] [CrossRef]
- Sarikhani, A.; Allahverdinejad, B.; Hamzeh, M. A Non-Isolated Buck-Boost DC-DC Converter with Continuous Input Current for Photovoltaic Applications. IEEE J. Emerg. Sel. Top. Power Electron. 2020. [Google Scholar] [CrossRef]
- Park, J.; Jeong, M.G.; Kang, J.G.; Yoo, C. Solar Energy-Harvesting Buck–Boost Converter With Battery-Charging and Battery-Assisted Modes. IEEE Trans. Ind. Electron. 2020, 68, 2163–2172. [Google Scholar] [CrossRef]
- Co, M.L.; Khouzam, J.P.; Pour-Ghaz, I.; Minhas, S.; Ray, I.B. Emerging Technologies in Cardiac Pacing From Leadless Pacers to Stem Cells. Curr. Probl. Cardiol. 2021, 46, 100797. [Google Scholar] [CrossRef]
- Azimi, S.; Golabchi, A.; Nekookar, A.; Rabbani, S.; Amiri, M.H.; Asadi, K.; Abolhasani, M.M. Self-powered cardiac pacemaker by piezoelectric polymer nanogenerator implant. Nano Energy 2021, 83, 105781. [Google Scholar] [CrossRef]
- Adelstein, E.; Zhang, L.; Nazeer, H.; Loka, A.; Steckman, D. Increased incidence of electrical abnormalities in a pacemaker lead family. J. Cardiovasc. Electrophysiol. 2021, 32, 1111–1121. [Google Scholar] [CrossRef]
- Hajihosseini, M.; Andalibi, M.; Gheisarnejad, M.; Farsizadeh, H.; Khooban, M.H. DC/DC power converter control-based deep machine learning techniques: Real-time implementation. IEEE Trans. Power Electron. 2020, 35, 9971–9977. [Google Scholar] [CrossRef]
- Chanjira, P.; Tunyasrirut, S. Intelligent Control Using Metaheuristic Optimization for Buck-Boost Converter. J. Eng. 2020, 2020. [Google Scholar] [CrossRef]
- Noriyati, R.; Musyafa, A.; Rahmadiansah, A.; Utama, A.; Asy’ari, M.; Abdillah, M. Design and Implemented Buck-Boost Converter Based Fuzzy Logic Control on Wind Power Plant. Int. J. Mech. Mech. Eng. 2020, 20, 115–122. [Google Scholar]
- Soriano-Rangel, C.A.; He, W.; Mancilla-David, F.; Ortega, R. Voltage regulation in buck-boost converters feeding an unknown constant power load: An adaptive passivity-based control. IEEE Trans. Control. Syst. Technol. 2020, 29, 395–402. [Google Scholar] [CrossRef]
- Linares-Flores, J.; Barahona-Avalos, J.L.; Sira-Ramirez, H.; Contreras-Ordaz, M.A. Robust passivity-based control of a buck–boost-converter/DC-motor system: An active disturbance rejection approach. IEEE Trans. Ind. Appl. 2012, 48, 2362–2371. [Google Scholar] [CrossRef]
- Ghanghro, A.; Sahito, A.; Memon, M.; Soomro, A. Nonlinear Controller for Buck Boost Converter for Photovoltaic System. Int. J. Electr. Eng. Emerg. Technol. 2020, 3, 59–63. [Google Scholar]
- Albira, M.E.; Alzahrani, A.; Zohdy, M. Model Predictive Control of DC-DC Buck-Boost Converter with Various Resistive Load Values. In Proceedings of the 2020 IEEE Global Congress on Electrical Engineering (GC-ElecEng), Valencia, Spain, 4–6 September 2020; pp. 124–128. [Google Scholar]
- Arora, R.; Tayal, V.K.; Singh, H.; Singh, S. PSO optimized PID controller design for performance enhancement of hybrid renewable energy system. In Proceedings of the 2020 IEEE 9th Power India International Conference (PIICON), Sonepat, India, 28 February–1 March 2020; pp. 1–5. [Google Scholar]
- Ardhenta, L.; Ansyari, M.R.; Subroto, R.K.; Hasanah, R.N. DC Voltage Regulator using Buck-Boost Converter Based PID-Fuzzy Control. In Proceedings of the 2020 IEEE 10th Electrical Power, Electronics, Communications, Controls and Informatics Seminar (EECCIS), Malang, Indonesia, 26–28 August 2020; pp. 117–121. [Google Scholar]
- Almawlawe, M.D.; Kovandzic, M. A modified method for tuning PID controller for buck-boost converter. Int. J. Adv. Eng. Res. Sci. 2016, 3, 236938. [Google Scholar] [CrossRef]
- Erickson, R.W.; Maksimovic, D. Fundamentals of Power Electronics; Springer Science & Business Media: Berlin, Germany, 2007. [Google Scholar]
- Ang, S.; Oliva, A.; Griffiths, G.; Harrison, R. Continuous—Time modeling of switching converters. In Power–Switching Converters, 3rd ed.; CRC Press: Boca Raton, FL, USA, 2010. [Google Scholar]
- El-Khazali, R. Fractional-order PIλDμ controller design. Comput. Math. Appl. 2013, 66, 639–646. [Google Scholar] [CrossRef]
- El-Khazali, R. On the biquadratic approximation of fractional–order Laplacian operators. Analog Integr. Circuits Signal Process. 2015, 82, 503–517. [Google Scholar] [CrossRef]
- Podlubny, I.; Petráš, I.; Vinagre, B.M.; O’leary, P.; Dorčák, L. Analogue realizations of fractional-order controllers. Nonlinear Dyn. 2002, 29, 281–296. [Google Scholar] [CrossRef]
- Wallén, A.; ÅRström, K.; Hägglun, T. Loop-Shaping Design Of PID Controllers With Constant Ti/Td RATIO. Asian J. Control 2002, 4, 403–409. [Google Scholar] [CrossRef]
- Monje, C.A.; Vinagre, B.M.; Feliu, V.; Chen, Y. Tuning and auto-tuning of fractional order controllers for industry applications. Control Eng. Pract. 2008, 16, 798–812. [Google Scholar] [CrossRef] [Green Version]
- Ogata, K. Modern Control Engineering; Prentice Hall: Upper Saddle River, NJ, USA, 2009. [Google Scholar]
- Dorf, R.C.; Bishop, R.H. Modern Control Systems; Pearson: London, UK, 2011. [Google Scholar]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Element | Notation | Value |
|---|---|---|
| DC voltage source | 25 V | |
| Capacitor | C | 30 F |
| Inductor | L | 10 mH |
| Resistance | R | 10 |
| Switching frequency | 20 kHz |
| Parameter | Notation | Buck | Boost |
|---|---|---|---|
| Phase margin | 90.7 | 90.5 | |
| Uncontrolled plant phase | |||
| Fractional-order | 0.6745 | 0.6727 |
| Coefficient | Buck | Boost |
|---|---|---|
| / | / | / |
| / | / | / |
| / | / | / |
| / | / | / |
| k |
| Notation | FOPID | PID 1st Option | PID 2nd Option |
|---|---|---|---|
| 0 | 0 | 0 | |
| 10.6/3.03 s | 99.8/84.2 s | 98.4/8.27 s | |
| 11.6/3.31 s | 113/93.8 s | 99.5/8.29 s | |
| 30/8.55 s | 299/245 s | 286/21.9 s | |
| 134/38.3 s | 1.71/1.36 ms | 2.94/0.32 ms | |
| %M | 47% | 52/50% | 69/74% |
| 60 | 60 | 30 |
| Constant | Buck | Boost | Element | Buck | Boost |
|---|---|---|---|---|---|
| 100 | 10 | ||||
| 1.1981 | 1.2018 | 100 k | 100 k | ||
| 1.76 | 1.75 | ||||
| 17.6752 | 17.5233 | 0.12 | 0.12 | ||
| 0.4714 | 0.4749 | 1.2 k | 1.2 k | ||
| 17.7 k | 17.5 | ||||
| 471 | 475 | ||||
| R | 1 k | 1 k | |||
| 0.022 F | 0.063 F | ||||
| 0.142 F | 0.404 F | ||||
| 0.25 F | 0.712 F | ||||
| 1.602 F | 4.55 F |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
S. Sánchez, A.G.; Soto-Vega, J.; Tlelo-Cuautle, E.; Rodríguez-Licea, M.A. Fractional-Order Approximation of PID Controller for Buck–Boost Converters. Micromachines 2021, 12, 591. https://doi.org/10.3390/mi12060591
S. Sánchez AG, Soto-Vega J, Tlelo-Cuautle E, Rodríguez-Licea MA. Fractional-Order Approximation of PID Controller for Buck–Boost Converters. Micromachines. 2021; 12(6):591. https://doi.org/10.3390/mi12060591
Chicago/Turabian StyleS. Sánchez, Allan G., Josué Soto-Vega, Esteban Tlelo-Cuautle, and Martín Antonio Rodríguez-Licea. 2021. "Fractional-Order Approximation of PID Controller for Buck–Boost Converters" Micromachines 12, no. 6: 591. https://doi.org/10.3390/mi12060591
APA StyleS. Sánchez, A. G., Soto-Vega, J., Tlelo-Cuautle, E., & Rodríguez-Licea, M. A. (2021). Fractional-Order Approximation of PID Controller for Buck–Boost Converters. Micromachines, 12(6), 591. https://doi.org/10.3390/mi12060591