
Orthogonal Optimal Design of Multiple Parameters of a Magnetically Controlled Capsule Robot

Abstract
:1. Introduction
2. Working Principle and Related Parameters of Capsule Robot
3. Numerical Calculation Method
3.1. Mathematical Model of Numerical Calculation
3.2. Fluid Turbulent Intensity
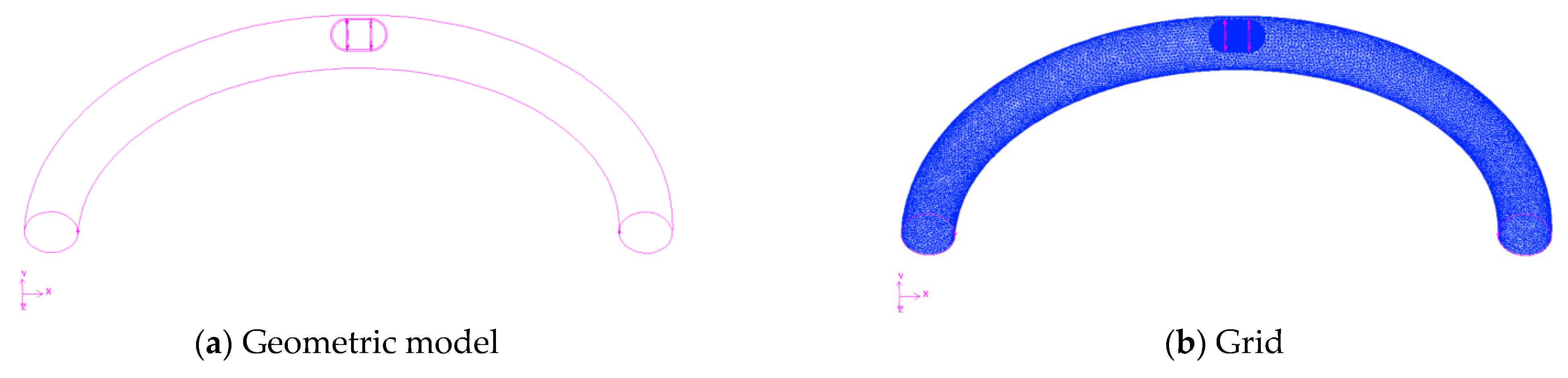
3.3. System Modeling
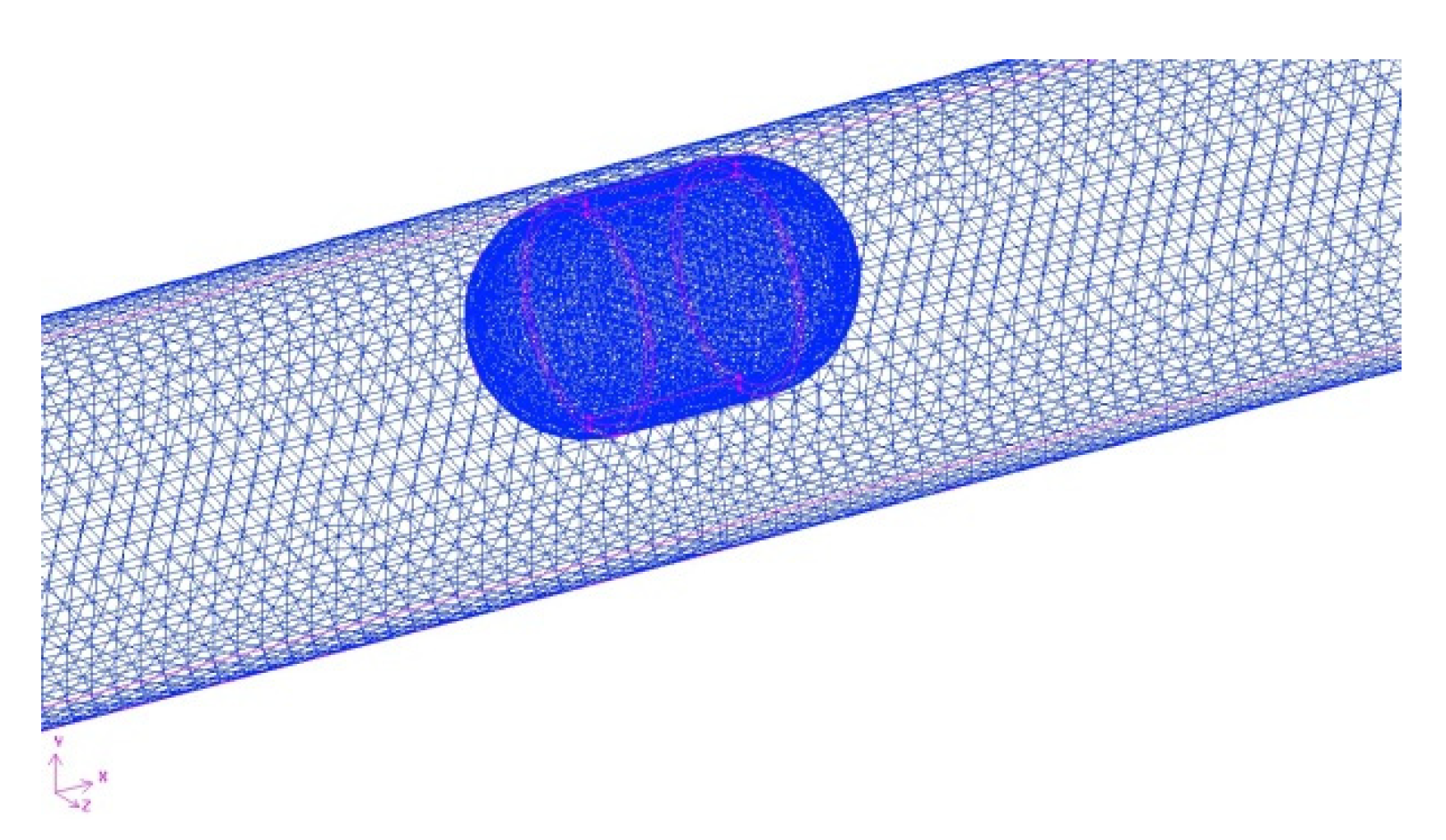
3.4. Grid Division
3.5. Boundary Condition and Parameter Setting
4. Experimental Measurement
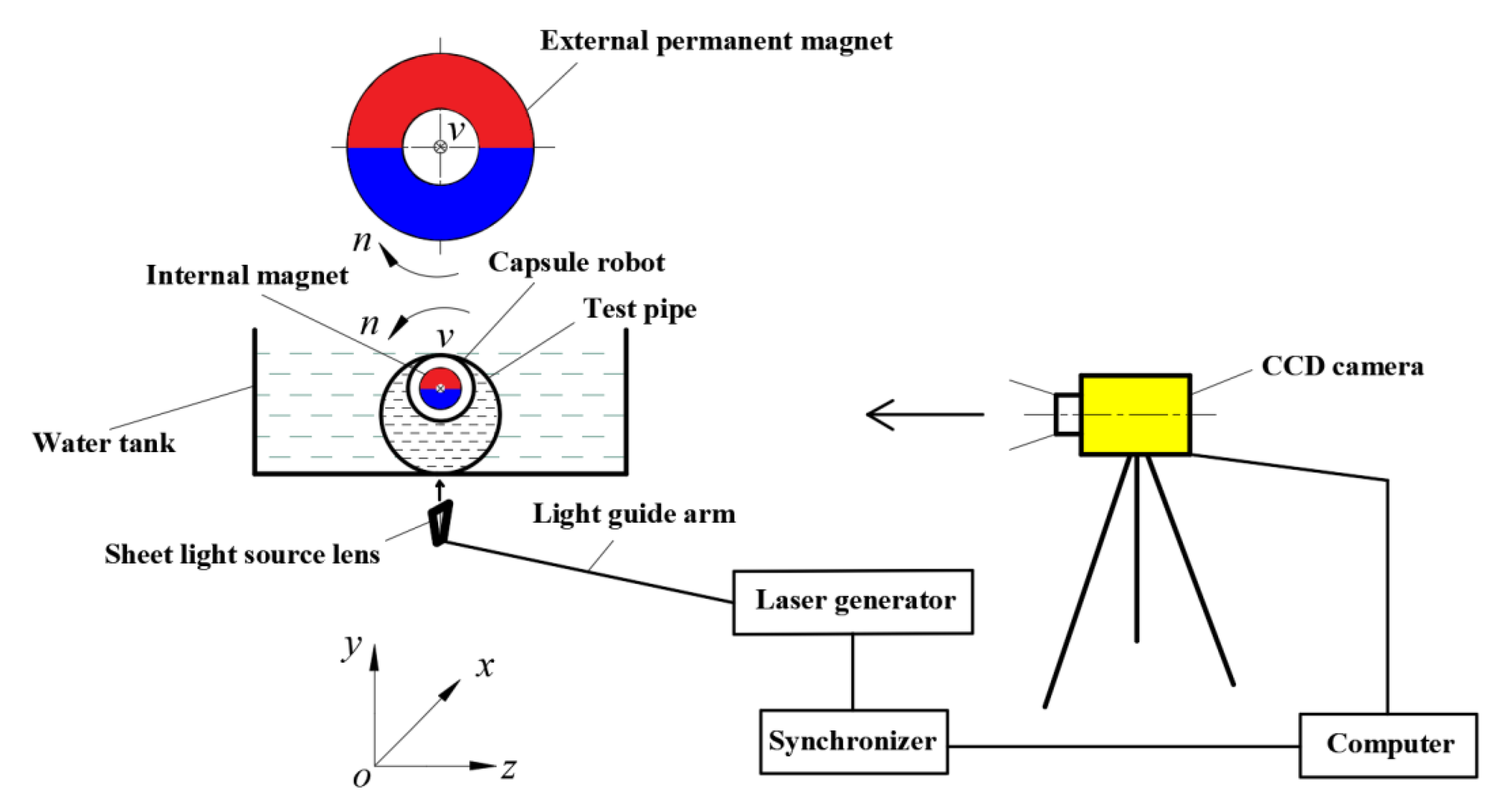
4.1. Measurement System
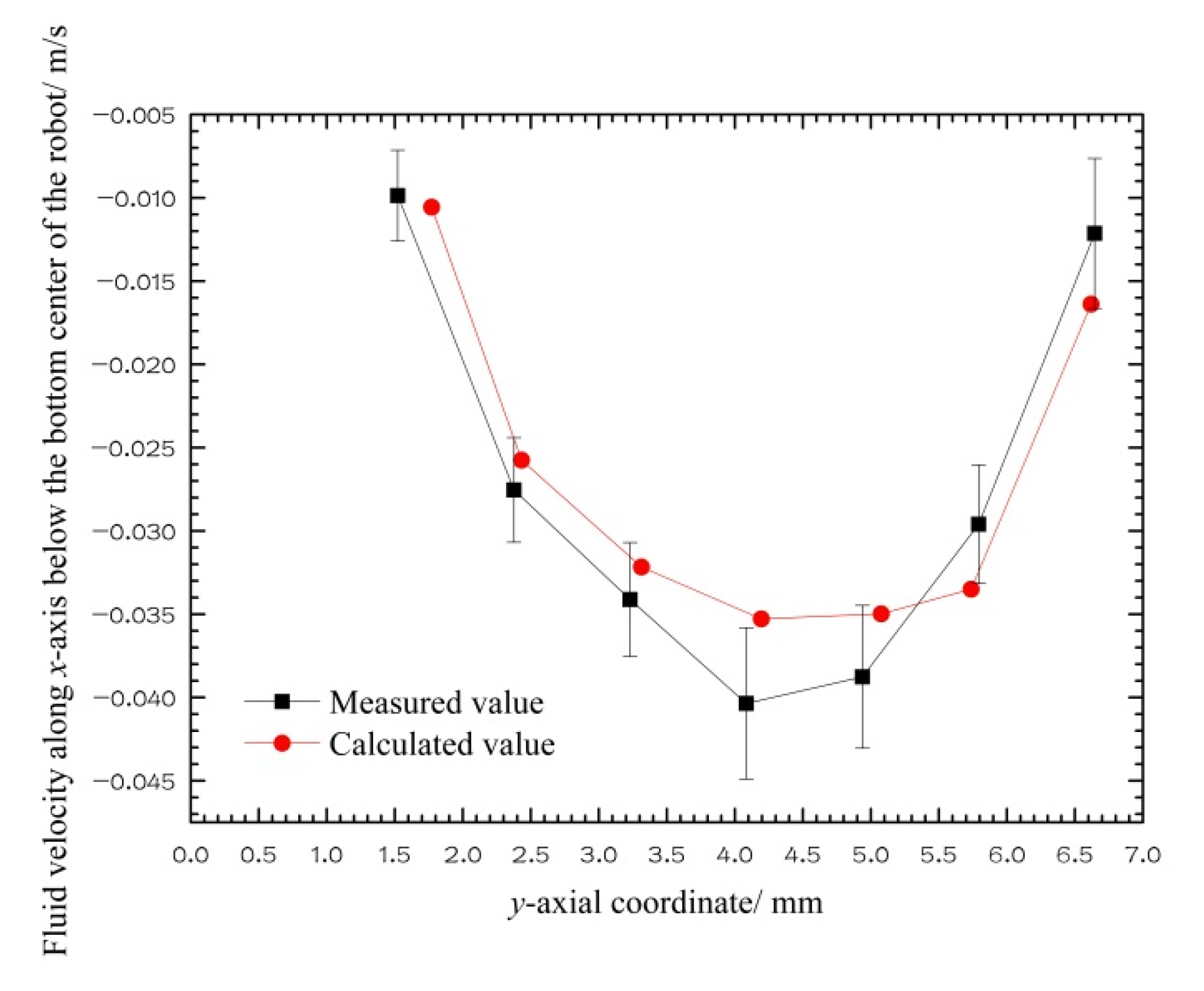
4.2. Comparison between Numerical Calculation and Experimental Measurement
5. Performance Analysis of Capsule Robot in Complex Environment
5.1. Curved Pipe
5.2. Peristaltic Environment
6. Orthogonal Calculation and Analysis of Multi-Parameters of Capsule Robot
6.1. Orthogonal Numerical Calculation
6.2. Range Analysis of the Operating Performance Indicators of the Capsule Robot
6.3. Variance Analysis of the Operating Performance of the Capsule Robot
6.4. Parameter Optimization of the Capsule Robot System
7. Conclusions
- (1)
- A set of drive systems for a capsule robot in a pipe driven by an external permanent magnet, and a measurement system of the fluid flow field in the pipe during the robot’s precession, were designed and manufactured. The velocity of the fluid in the pipe of the capsule robot was calculated using the CFD method and measured using PIV technology. The numerical calculation values and experimental measurement values were similar, which verifies that the CFD method used in this paper is feasible and accurate. Furthermore, the performance of the capsule robots was numerically analyzed and compared in complex environments of a curved pipe and peristaltic flow;
- (2)
- Range and variance analysis in orthogonal design was used to analyze the relative degree and significance of the influence of pipe diameter, robotic translational speed, robotic rotational speed, and fluid viscosity on the three performance indicators of the capsule robot. The fluid viscosity is an important factor that affects all the operating performance indicators of the capsule robot;
- (3)
- Using the best passing capacity and operating stability of the capsule robot, and the minimum damage to the pipe, as the optimization objectives, the optimal combinations of various parameters of the capsule robot system were designed;
- (4)
- Numerous factors affect the operating performance of the capsule robot, such as structural parameters of the robot, pipe characteristics, and magnetic field parameters. These parameters need to be studied. In addition, the interaction of various factors was not considered in this study. These issues will be studied in the future;
- (5)
- The CFD method, PIV technology, and orthogonal design method used in this paper can be widely used in the calculation, measurement, and optimization of the fluid field of in-pipe capsule robots in a liquid environment.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Rahman, I.; Pioche, M.; Shim, C.S.; Lee, S.P.; Sung, I.-K.; Saurin, J.-C.; Patel, P. Magnetic-assisted capsule endoscopy in the upper GI tract using a novel navigation system (with video). Gastrointest. Endosc. 2016, 5, 889–895.e1. [Google Scholar] [CrossRef]
- OMOM NC100. 2021. Available online: https://www.jinshangroup.com/info/1651.html (accessed on 6 June 2021).
- Iddan, G.; Meron, G.; Glukhovsky, A.; Swain, P. Wireless capsule endoscopy. Nature 2000, 405, 417. [Google Scholar] [CrossRef]
- Guo, J.; Bao, Z.; Fu, Q.; Guo, S. Design and implementation of a novel wireless modular capsule robotic system in pipe. Med. Biol. Eng. Comput. 2020, 58, 2305–2324. [Google Scholar] [CrossRef]
- Liang, L.; Peng, H.; Chen, B.; Tang, Y.; Xu, Y. Performance analysis and parameter optimization of an inner spiral in-pipe robot. Robotica 2016, 34, 361–382. [Google Scholar] [CrossRef]
- Huda, M.N.; Liu, P.; Saha, C.; Yu, H. Modelling and motion analysis of a pill-sized hybrid capsule robot. J. Intell. Robot. Syst. 2020, 100, 753–764. [Google Scholar] [CrossRef] [Green Version]
- Yma, B.; Gya, B.; Pja, B.; Zab, K.; Wab, W.; Fca, B.; Hza, B. A novel wireless power transfer system with two parallel opposed coils for gastrointestinal capsule robot. Sens. Actuators A Phys. 2020, 321, 112413. [Google Scholar]
- Hoang, M.C.; Le, V.H.; Kim, J.; Choi, E.; Kim, C.S. Untethered robotic motion and rotating blade mechanism for actively locomotive biopsy capsule endoscope. IEEE Access 2019, 7, 93364–93374. [Google Scholar] [CrossRef]
- Mousa, A.; Feng, L.; Dai, Y.; Tovmachenko, O. Self-driving 3-legged crawling prototype capsule robot with orientation controlled by external magnetic field. In Proceedings of the 2018 WRC Symposium on Advanced Robotics and Automation, Beijing, China, 16 August 2018; pp. 243–248. [Google Scholar]
- Gao, J.Y.; Yan, G.Z.; Shi, Y.B.; Cao, H.L.; Huang, K.; Liu, J. Optimization design of extensor for improving locomotion efficiency of inchworm-like capsule robot. Sci. China Technol. Sci. 2019, 62, 1930–1938. [Google Scholar] [CrossRef]
- Son, D.; Dong, X.; Sitti, M. A simultaneous calibration method for magnetic robot localization and actuation systems. IEEE Trans. Robot. 2018, 35, 343–352. [Google Scholar] [CrossRef]
- Yuan, S.; Wan, Y.; Mao, Y.; Song, S.; Meng, Q.H. Design of a novel electromagnetic actuation system for actuating magnetic capsule robot. In Proceedings of the 2019 IEEE International Conference on Robotics and Biomimetics, Dali, China, 6–8 December 2019; pp. 1513–1519. [Google Scholar]
- Li, J.; Barjuei, E.S.; Ciuti, G.; Hao, Y.; Zhang, P.; Menciassi, A.; Huang, Q.; Dario, P. Magnetically-driven medical robots: An analytical magnetic model for endoscopic capsules design. J. Magn. Magn. Mater. 2018, 452, 278–287. [Google Scholar] [CrossRef]
- Pittiglio, G.; Barducci, L.; Martin, J.W.; Norton, J.; Avizzano, C.A.; Obstein, K.; Valdastri, P. Magnetic levitation for soft-tethered capsule colonoscopy actuated with a single permanent magnet: A dynamic control approach. IEEE Robot. Autom. Lett. 2019, 4, 1224–1231. [Google Scholar] [CrossRef] [Green Version]
- Ye, B.; Zhang, W.; Sun, Z.J.; Lin, G.; Chao, D.; Chen, Y.Q.; Zhang, H.H.; Sheng, L. Study on a magnetic spiral-type wireless capsule endoscope controlled by rotational external permanent magnet. J. Magn. Magn. Mater. 2015, 395, 316–323. [Google Scholar] [CrossRef]
- Guo, B.; Liu, Y.; Prasad, S. Modelling of capsule–intestine contact for a self-propelled capsule robot via experimental and numerical investigation. Nonlinear Dyn. 2019, 98, 3155–3167. [Google Scholar] [CrossRef] [Green Version]
- Zhou, H.; Alici, G.; Than, T.D.; Li, W. Modeling and experimental characterization of propulsion of a spiral-type microrobot for medical use in gastrointestinal tract. IEEE Trans. Biomed. Eng. 2012, 60, 1751–1759. [Google Scholar] [CrossRef]
- Wang, Z.; Guo, S.; Fu, Q.; Jian, G. Characteristic evaluation of a magnetic-actuated microrobot in pipe with screw jet motion. Microsyst. Technol. 2019, 25, 719–727. [Google Scholar] [CrossRef]
- Zhang, Y.; Yang, H.; Yang, D.; Liu, X.; Liu, Z. Polynomial profile optimization method of a magnetic petal-shaped capsule robot. Mechatronics 2020, 65, 102309. [Google Scholar] [CrossRef]
- Nguyen, K.T.; Hoang, M.C.; Choi, E.; Kang, B.; Kim, C.S. Medical microrobot-a drug delivery capsule endoscope with active locomotion and drug release mechanism: Proof of concept. Int. J. Control Autom. Syst. 2020, 18, 65–75. [Google Scholar] [CrossRef]
- Hoang, M.C.; Le, V.H.; Nguyen, K.T.; Nguyen, V.D.; Kim, J.; Choi, E.; Bang, S.; Kang, B.; Park, J.O.; Kim, C.S. A robotic biopsy endoscope with magnetic 5-DOF locomotion and a retractable biopsy punch. Micromachines 2020, 11, 98. [Google Scholar] [CrossRef] [Green Version]
- Tang, P.H.; Liang, L.; Xiang, Y.H. Measurement and simulation of fluid flow field in the pipe of magnetic capsule robot. Adv. Mech. Eng. 2020, 12, 1–13. [Google Scholar]
- Zhang, H.; Wang, Y.; Vasilescu, S.; Gu, Z.; Tao, S. Bio-inspired enhancement of friction and adhesion at the polydimethylsiloxane-intestine interface and biocompatibility characterization. Mat. Sci. Eng. C 2017, 74, 246–252. [Google Scholar] [CrossRef]
- Liang, L.; Chen, B.; Tang, Y.; Xu, Y.; Liu, Y. Operational performance analysis of spiral capsule robot in multiphase fluid. Robotica 2019, 37, 213–232. [Google Scholar] [CrossRef]
- Wang, F.J. Computational Fluid Dynamics Analysis—CFD Software Theory and Application; Tsinghua University Press: Beijing, China, 2004. [Google Scholar]
- Liu, X.L.; Han, Y.; Wu, G.X. Dimethicone power applied under endoscopy in examination of upper gastrointestinal tract. China J. Endosc. 2016, 22, 44–46. [Google Scholar]
- Li, J.; Zhang, H.H.; Zhang, H.L.; Xu, Y.J.; Lai, Y.Q. Numerical simulation on vortical structures of electrolyte flow field in large aluminium reduction cells. Chin. J. Nonferr. Met. 2012, 22, 2082–2089. [Google Scholar]
- Fang, K.T.; Mam, C.X. Orthogonal and Uniform Experimental Design; Scientific Press: Beijing, China, 2001. [Google Scholar]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Environment and Difference | Forward Resistance of the Robot/ mN | Fluid Turbulent Intensity Near the Robot/% | Maximum Fluid Pressure to the Pipe Wall/Pa |
|---|---|---|---|
| Straight pipe | 3.51 | 12.11 | 17.32 |
| Curved pipe | 3.62 | 12.34 | 17.13 |
| Proportion of difference | 3.13% | 1.90% | 1.1% |
| Type | Fluid Flow State | Forward Resistance of the Robot/mN | Fluid Turbulent Intensity Near the Robot/% | Maximum Fluid Pressure to the Pipe Wall/Pa |
|---|---|---|---|---|
| Active capsule robot | Static flow | 3.51 | 12.11 | 17.32 |
| Positive flow | 3.50 | 12.14 | 3.89 | |
| Reverse flow | 5.27 | 12.83 | −0.44 | |
| Passive capsule | Positive flow | −0.09 | 9.60 | 7.35 |
| Reverse flow | 1.77 | 10.21 | −0.33 |
| Level | Factor | |||
|---|---|---|---|---|
| A (d)/mm | B (v)/m/s | C (n)/r/min | D (η)/Pa·s | |
| 1 | 14 | 0.02 | 60 | 0.005 |
| 2 | 16 | 0.03 | 90 | 0.01 |
| 3 | 18 | 0.04 | 120 | 0.02 |
| 4 | 20 | 0.05 | 150 | 0.05 |
| 5 | 22 | 0.06 | 180 | 0.1 |
| No. | A (d) /mm | B (v) /m/s | C (n) /r/min | D (η) /Pa·s | Factor Combination | Forward Resistance of the Robot Fr/mN | Fluid Turbulent Intensity Near the Robot It/% | Maximum Fluid Pressure to the Pipe Wall Pm/Pa |
|---|---|---|---|---|---|---|---|---|
| 1 | 14 | 0.02 | 60 | 0.005 | A1B1C1D1 | 1.17 | 6.55 | 5.72 |
| 2 | 14 | 0.03 | 90 | 0.01 | A1B2C2D2 | 2.57 | 8.21 | 15.39 |
| 3 | 14 | 0.04 | 120 | 0.02 | A1B3C3D3 | 5.25 | 11.05 | 30.57 |
| 4 | 14 | 0.05 | 150 | 0.05 | A1B4C4D4 | 13.17 | 17.08 | 78.94 |
| 5 | 14 | 0.06 | 180 | 0.1 | A1B5C5D5 | 29.06 | 25.15 | 163.77 |
| 6 | 16 | 0.02 | 90 | 0.02 | A2B1C2D3 | 1.58 | 9.60 | 7.35 |
| 7 | 16 | 0.03 | 120 | 0.05 | A2B2C3D4 | 4.03 | 13.50 | 18.47 |
| 8 | 16 | 0.04 | 150 | 0.1 | A2B3C4D5 | 8.81 | 19.32 | 42.31 |
| 9 | 16 | 0.05 | 180 | 0.005 | A2B4C5D1 | 2.27 | 8.89 | 10.65 |
| 10 | 16 | 0.06 | 60 | 0.01 | A2B5C1D2 | 3.72 | 10.30 | 20.47 |
| 11 | 18 | 0.02 | 120 | 0.1 | A3B1C3D5 | 2.99 | 16.91 | 18.40 |
| 12 | 18 | 0.03 | 150 | 0.005 | A3B2C4D1 | 1.24 | 9.40 | 4.54 |
| 13 | 18 | 0.04 | 180 | 0.01 | A3B3C5D2 | 2.09 | 10.66 | 10.03 |
| 14 | 18 | 0.05 | 60 | 0.02 | A3B4C1D3 | 3.51 | 12.11 | 17.32 |
| 15 | 18 | 0.06 | 90 | 0.05 | A3B5C2D4 | 6.91 | 16.97 | 30.73 |
| 16 | 20 | 0.02 | 150 | 0.01 | A4B1C4D2 | 1.01 | 11.01 | 3.53 |
| 17 | 20 | 0.03 | 180 | 0.02 | A4B2C5D3 | 1.90 | 12.86 | 6.48 |
| 18 | 20 | 0.04 | 60 | 0.05 | A4B3C1D4 | 3.57 | 13.81 | 14.18 |
| 19 | 20 | 0.05 | 90 | 0.1 | A4B4C2D5 | 6.73 | 19.32 | 28.43 |
| 20 | 20 | 0.06 | 120 | 0.005 | A4B5C3D1 | 2.93 | 12.73 | 8.45 |
| 21 | 22 | 0.02 | 180 | 0.05 | A5B1C5D4 | 1.65 | 15.90 | 18.00 |
| 22 | 22 | 0.03 | 60 | 0.1 | A5B2C1D5 | 3.26 | 15.63 | 19.59 |
| 23 | 22 | 0.04 | 90 | 0.005 | A5B3C2D1 | 1.74 | 10.10 | 5.66 |
| 24 | 22 | 0.05 | 120 | 0.01 | A5B4C3D2 | 2.76 | 12.18 | 9.61 |
| 25 | 22 | 0.06 | 150 | 0.02 | A5B5C4D3 | 4.45 | 15.32 | 17.88 |
| Performance Indicator | Influencing Factor | ||||
|---|---|---|---|---|---|
| d/mm | v/m/s | n/r/min | η/Pa·s | ||
| Fr /mN | Level 1 | 10.24 | 1.68 | 3.04 | 1.87 |
| Level 2 | 4.08 | 2.60 | 3.91 | 2.43 | |
| Level 3 | 3.35 | 4.29 | 3.59 | 3.34 | |
| Level 4 | 3.23 | 5.69 | 5.74 | 5.86 | |
| Level 5 | 2.77 | 9.41 | 7.39 | 10.17 | |
| Mean range | 7.47 | 7.73 | 4.35 | 8.30 | |
| It /% | Level 1 | 13.61 | 11.99 | 11.68 | 9.53 |
| Level 2 | 12.32 | 11.92 | 12.84 | 10.47 | |
| Level 3 | 13.21 | 12.99 | 13.27 | 12.19 | |
| Level 4 | 13.95 | 13.92 | 14.43 | 15.45 | |
| Level 5 | 13.83 | 16.09 | 14.69 | 19.27 | |
| Mean range | 1.62 | 4.17 | 3.01 | 9.73 | |
| Pm /Pa | Level 1 | 58.88 | 10.60 | 15.46 | 7.00 |
| Level 2 | 19.85 | 12.89 | 17.51 | 11.81 | |
| Level 3 | 16.20 | 20.55 | 17.10 | 15.92 | |
| Level 4 | 12.21 | 28.99 | 29.44 | 32.06 | |
| Level 5 | 14.15 | 48.26 | 41.79 | 54.50 | |
| Mean range | 46.66 | 37.66 | 26.33 | 47.50 | |
| Performance Indicator | Source of Variance | Square Sum | Degree of Freedom | Mean Square | F Value | Fα | Significance |
|---|---|---|---|---|---|---|---|
| Fr | d | 194.10 | 4 | 48.53 | 1.57 | F0.2(4,20) = 1.7 F0.1(4,20) = 2.25 F0.05(4,20) = 2.87 F0.01(4,20) = 4.43 | / |
| v | 184.42 | 4 | 46.11 | 1.49 | / | ||
| n | 64.65 | 4 | 16.16 | 0.52 | / | ||
| η | 231.33 | 4 | 57.83 | 1.87 | * | ||
| e | 123.72 | 4 | 30.93 | ||||
| It | d | 8.59 | 4 | 2.15 | 0.63 | / | |
| v | 59.20 | 4 | 14.80 | 4.34 | *** | ||
| n | 30.07 | 4 | 7.52 | 2.21 | * | ||
| η | 318.06 | 4 | 79.52 | 23.33 | **** | ||
| e | 13.63 | 4 | 3.41 | ||||
| Pm | d | 7650.56 | 4 | 1912.64 | 1.95 | * | |
| v | 4639.59 | 4 | 1159.90 | 1.18 | / | ||
| n | 2541.52 | 4 | 635.38 | 0.65 | / | ||
| η | 7488.94 | 4 | 1872.23 | 1.90 | * | ||
| e | 3932.26 | 4 | 983.06 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tang, P.; Liang, L.; Guo, Z.; Liu, Y.; Hu, G. Orthogonal Optimal Design of Multiple Parameters of a Magnetically Controlled Capsule Robot. Micromachines 2021, 12, 802. https://doi.org/10.3390/mi12070802
Tang P, Liang L, Guo Z, Liu Y, Hu G. Orthogonal Optimal Design of Multiple Parameters of a Magnetically Controlled Capsule Robot. Micromachines. 2021; 12(7):802. https://doi.org/10.3390/mi12070802
Chicago/Turabian StyleTang, Puhua, Liang Liang, Zhiming Guo, Yu Liu, and Guanyu Hu. 2021. "Orthogonal Optimal Design of Multiple Parameters of a Magnetically Controlled Capsule Robot" Micromachines 12, no. 7: 802. https://doi.org/10.3390/mi12070802
APA StyleTang, P., Liang, L., Guo, Z., Liu, Y., & Hu, G. (2021). Orthogonal Optimal Design of Multiple Parameters of a Magnetically Controlled Capsule Robot. Micromachines, 12(7), 802. https://doi.org/10.3390/mi12070802