1. Introduction
Additive manufacturing (AM) is widely used in several manufacturing sectors. Fused filament fabrication (FFF), especially, has advantages such as simplicity and cost-effectiveness [
1]. For example, strain sensors [
2], multiaxial force sensors [
3], and batteries [
4] have already been fabricated with this single-step FFF process. FFF can also be adopted in the textile field by printing plastics directly on textile substrates [
5] or by printing the whole textile composition [
6]. Moreover, it has been demonstrated that FFF with deformable plastics and substrates can be used in manufacturing stretchable electronics, which can be further laminated on textiles for wearable electronics [
7].
Recently, 3D-printed stretchable and wearable electronics have gained more attention, and rigid [
4] and stretchable wearables [
8] have been successfully fabricated. Still, stretchable electronics that are practically integrable into clothing have not yet been manufactured via 3D printing. For integrable stretchable and wearable electronics, carbon-filled polymers are an especially promising alternative for the creation of mechanically complex and thermally and electrically conductive structures [
2,
9]. These polymers can be modified using carbon-based additives with different form factors and dimensions, such as carbon fibers [
10], carbon nanotubes (CNTs) [
2,
3,
9], carbon black [
11], graphene [
12], and others [
13], with a wide variety of outcomes in terms of properties such as strength, thermal and electrical conductivity, piezoresistive behavior, and many others [
14,
15,
16]. These modified materials enable the fabrication of sensors, wearables, and other end-products, e.g., by providing higher strength, fire retardancy, or electrical properties. However, FFF polymers with fillers generally require a high nozzle diameter to prevent clogging, decreasing the printing quality [
2] and causing highly anisotropic printing results [
17]. Fillers also rapidly increase the Young’s modulus of the polymers, leading to a trade-off between stiffness and conductivity [
2].
In FFF polymers, the shape and size of carbon fillers influence the formation of the fillers’ conductive network, percolation threshold, and overall conductivity. For example, when the results from previous studies are converted into conductivity values, acrylonitrile butadiene styrene (ABS) filament consisting of 15 wt% nano-scale carbon black has 0.025 S/m conductivity [
11], and 5.6 wt% graphene flakes with a lateral size of 3–5-µm [
12] provide 0.001 S/m. CNTs were mixed into thermoplastic polyurethane (TPU) filaments (with a CNT content of 4 wt%) of in 9.5 nm diameter and 1.5 µm in length, providing 32 S/m conductivity after the 3D-printing process (with a 0.6 mm nozzle) [
2]. Furthermore, Tzounis et al. blended TPU and CNTs (5 wt%, 9.5 nm diameter, 3.0 µm length), which resulted in higher conductivity, approximately 100 S/m, but this required a less accurate 0.8 mm nozzle [
17]. Spoerk et al. 3D-printed polypropylene (PP) filaments filled with short carbon fibers (7 µm in diameter and 250 µm in length) at proportions of up to 10 wt% with a 0.6 mm nozzle [
18] for thermally conductive structures. Even longer millimeter-scale fibers can be added during the filament manufacturing process, but these are chopped to the micrometer-scale during the process [
10].
Furthermore, continuous carbon fiber filaments are used in FFF by feeding them into molten-state polymers during extrusion [
19,
20], increasing an object’s carbon fiber content. However, this process requires a larger nozzle [
19,
20]. Another alternative is to impregnate carbon fiber filaments before printing, enabling more complex [
21] and precise [
22] printing with filaments.
Feeding carbon fillers and carbon filaments through a 3D printer’s nozzle makes them compatible with readily available FFF printers. Furthermore, carbon semi-products, such as laminates and inks, can be integrated into the 3D printing process semi-automatically or automatically by pausing the process. Carbon fiber sheets can be laminated on top of objects to form durable and lightweight composite structures [
23] or inside them to address porosity and layer adhesion issues [
13]. Moreover, integrated carbon fiber tows can be used to monitor a matrix’s structural health via the tows’ resistance changes [
24]. Other electrical and thermal properties can be created by spray-depositing the 3D-printed surface with CNTs, and a 19-nm layer thickness on the smoothened surface is possible [
25,
26]. Furthermore, the direct ink writing (DIW) method can be combined with FFF to print carbon black ink electrodes for 3D printed supercapacitors [
27]. The FFF process even allows the manual or automatic integration of printed circuit board (PCB) components inside an object [
8], which, along with other placement methods, enables versatile 3D-printed electronics.
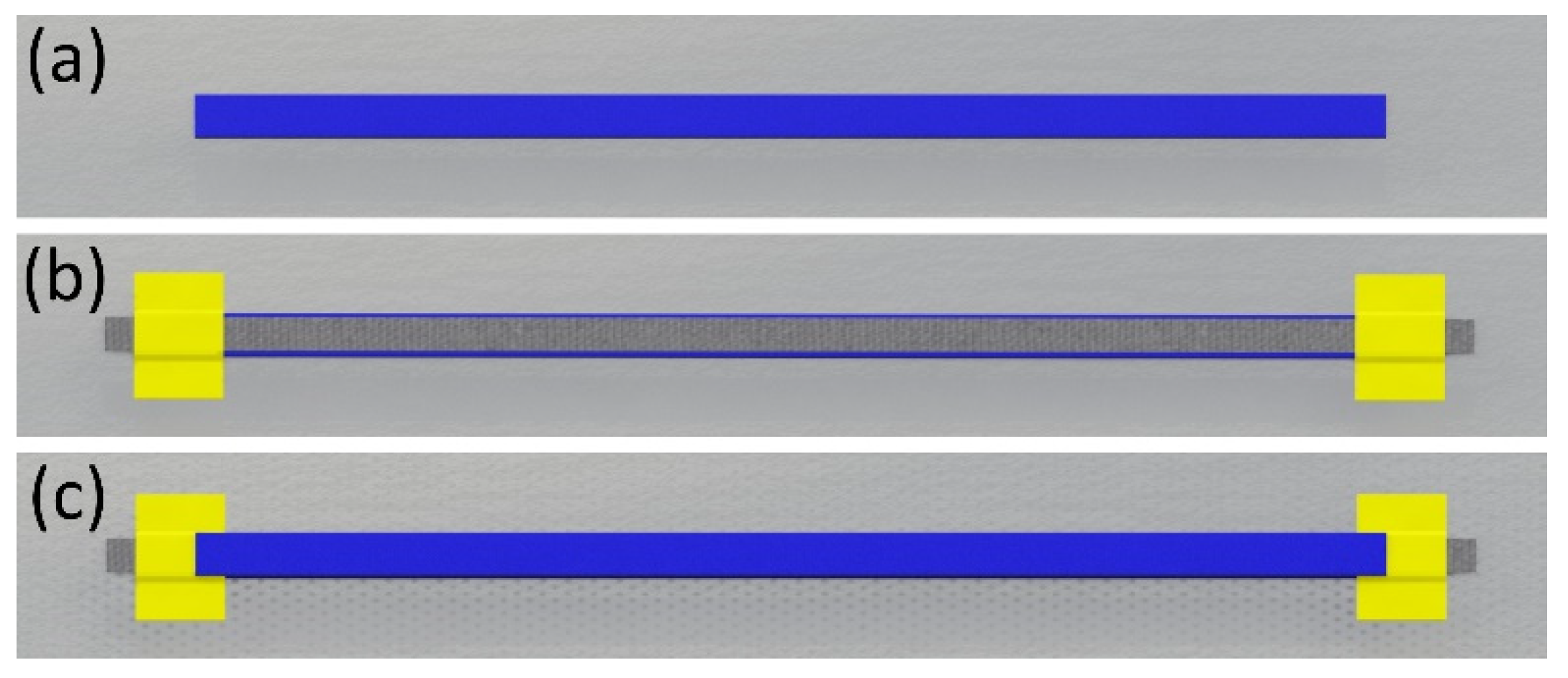
In this study, stretchable and wearable 3D-printed electronics components were made by adding sparse carbon fiber cloths (CFCs) inside a TPU matrix made with FFF. The advantages of this process are that CFCs with mechanical and electrical properties were (1) integrated inside the matrix without cavities or other 3D printing design modifications, and (2) adhesives were not required for their placement—it was sufficient to change the general 3D printing settings. Furthermore, CFCs embedded in this way inside the structure (3) do not decrease the adhesion between the TPU layers, and (4) they can be cut into different shapes, which can be used as functional elements in fabricating stretchable and wearable electronics. Furthermore, integrated CFCs can create (5) more isotropic and detailed objects than those created through FFF with carbon fiber filaments.
To the authors’ knowledge, permeable CFC has never been used to improve the electrical and mechanical properties of FFF objects. The measured properties of CFC compare favorably to those of carbon-filler filaments and can be used to provide stretchable and conductive composite matrices. The obtained results prove that matrices with CFC can sustain large numbers of deformation cycles with minimal changes in their resistance behavior, thanks to the combined mechanical and adhesion properties of the materials involved. We studied the characteristics and advantages of this new method by conducting quasi-static and cyclic electromechanical tests, which we further analyzed using digital image correlation (DIC) techniques to attain information about the local deformation field in the samples. Finally, the properties of the structure for sensor applications were estimated.
2. Materials and Methods
CFCs with centimeter-scale fibers are traditionally used in composite manufacturing to increase the Young’s modulus of materials with a minimal increase in density, i.e., to improve the specific modulus of materials. As well as mechanical features, CFCs are thermally and electrically conductive, thus having the potential to be used in wearable electronics. The stretchability that wearable electronics require was achieved by combining sparse CFCs and a highly stretchable TPU matrix. Single pull-up tests were first used to study the mechanical properties of the CFC matrices. Then cyclic tensile tests were conducted to measure the electromechanical features. Finally, the samples’ behavior was further analyzed with DIC.
2.1. Composition and Preparation of Samples
The CFCs used in this work were provided by ACP Composites [
28], and the reported average single carbon fiber length was 25.4 mm. The carbon fibers were processed from polyacrylonitrile (PAN) to promote their electrochemical properties [
29]. CFCs with two grades of nominal thicknesses, 0.0021” (53 µm) and 0.006” (153 µm), were tested. Thin CFCs were also tested as two- and three-layered plies to further improve their electrical conductivity. The single-layer CFCs and the two- and three-layered plies were laminated to make them flat and fixed together for the 3D printing process, which can decrease the nominal thicknesses of CFCs. Furthermore, plain zero samples without CFCs were tested for comparison. The composition of the carbon fiber and its nominal thickness in the electromechanical samples are presented in
Table 1.
A TPU filament was used as a 3D-printed backbone for the fabricated structure. TPU is a widely used material in 3D printing and stretchable electronics because of its high deformability and stability [
2,
3,
7]. For example, TPU-based stretchable films have also been used in wearable and printed electronics in combination with screen-printable conductive silver inks. Using TPU filaments is a convenient choice for developing 3D-printed stretchable and wearable electronics because of the ease of integration in these types of systems. Blue Ultimaker TPU 95A filament (Ultimaker B.V., Utrecht, The Netherlands) by Ultimaker B.V. (nominal diameter: 2.85 mm) was used in the tests, as it is more reliable to 3D print compared to the thinner 1.75 mm diameter FFF filaments, which are prone to bend and jam during 3D printing.
A commercial Ultimaker S5 FFF printer (Ultimaker B.V., Utrecht, The Netherlands) with an official air management unit accessory, with the Cura slicer program (version 4.4.0, Ultimaker B.V., Utrecht, The Netherlands) from Ultimaker B.V., was used in the 3D printer setup. The nozzle diameter was 0.4 mm, and the layer thickness was 0.15 mm. The nozzle temperature was 240 °C and the bed temperature was 60 °C, enabling good adhesion on a clean glass building plate. The printing speed was 25 mm/s, and the cooling fan was off. The number of walls was two, the infill ratio was 100%, and the infill shape was 45° lines. Furthermore, the infill was printed before the walls so that the CFC piece was smoothly fixed on the printed surface. As well as the typical printing settings, a script was added in the middle of the printing program to pause the printing automatically to manually insert the CFC piece. Furthermore, a prime tower feature was used before printing on top of the applied CFC piece to avoid uncontrolled leaking of the molten TPU from the nozzle onto the sample.
FFF was used to fabricate samples, of which the target dimensions were 10 mm wide, 200 mm long, and 1 mm thick. In the middle of the samples, an 8-mm-wide and 230-mm-long piece of CFC was placed longitudinally. CFCs were cut in the machine direction orientation (MDO), their loose ends serving as electrical contacts. Then, the CFC was fixed with two strips of Kapton tape to avoid using an adhesive and to reinforce the electrical contacts. The placed CFCs affected the samples’ dimensions, measured with a digital Vernier caliper with ± 0.01 mm measurement resolution. The sample preparation steps, drawn in Solidworks 3D design software (version 2021, Dassault Systèmes SolidWorks Corporation, Waltham, MA, USA), are presented in
Figure 1.
2.2. Electrical Measurement of the Samples
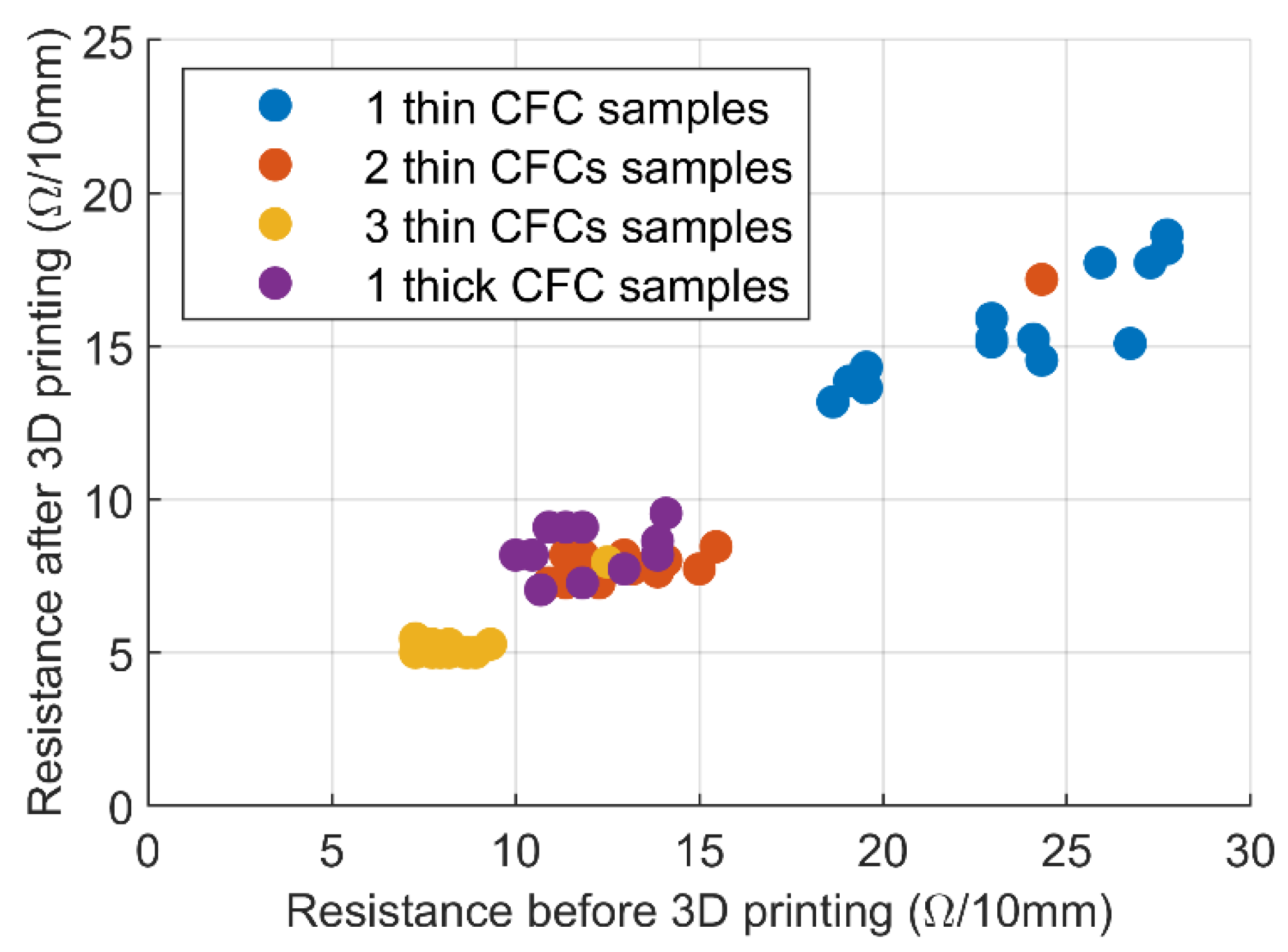
The CFC pieces were electrically conductive. Based on the amount of carbon fibers they contained, they provided different levels of electrical conductivity in the 3D-printed matrix. In the sample preparation, the resistance of the CFC pieces was measured twice: before their placement inside the sample and after the 3D printing process. The resistance was measured using a Fluke 183 multimeter (Elfa Distrelec Oy, Helsinki, Finland) by firmly pressing the multimeter probes on the CFC pieces to achieve a stable reading (<5 Ω variation). The distance between the probes was 220 mm. The comparability of the results to those of previous studies was enabled by converting resistance to conductivity. The conductivity was calculated with the equation
where
σ is the conductivity in S/m,
R is the resistance in Ω,
A is the cross-sectional area of CFC in m
2, and
L is the distance between probes in m. The cross-sectional area was calculated based on the nominal width and thickness of CFCs, as reported in
Table 1. Note that the conductivity here does not refer to the carbon fiber’s conductivity but to the average conductivity of the macroscopic sample’s CFC material.
2.3. Mechanical Tests
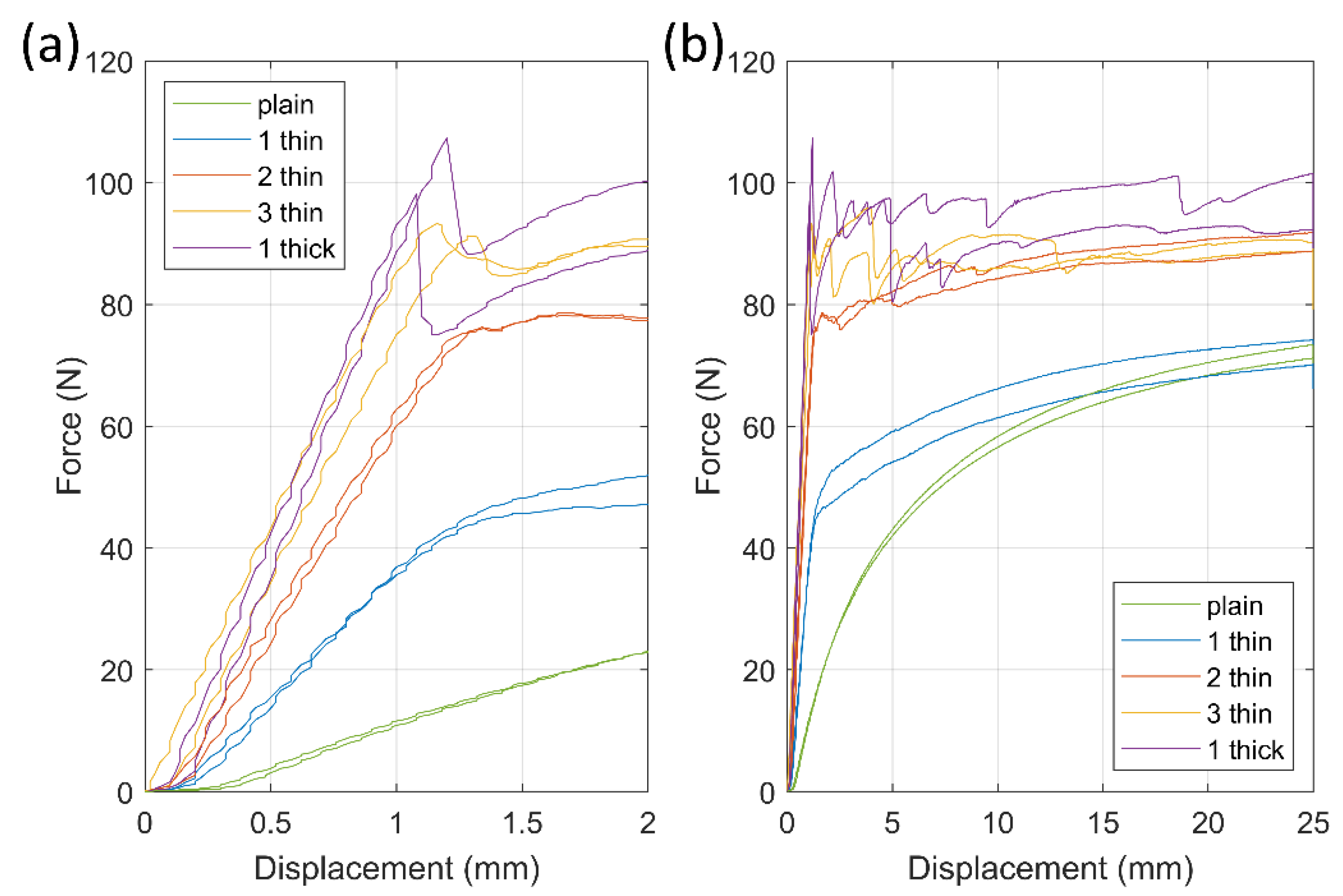
The mechanical behavior of the 3D-printed samples and the effect of the quantity of the integrated CFCs on the failure behavior was evaluated with an ESM303 tensile tester (Mark-10 Corporation, Copiague, NY, USA), equipped with a 500 N load cell. The distance of the clamps was 50 mm; the movement speed of the upper clamp was 25 mm/min. From each sample series, two samples were elongated 50% (25 mm) with a single pull-up test.
Because clothing-integrated stretchable and wearable components endure thousands of stretching cycles during their lifetime [
30], cyclic tensile loading was chosen as a more realistic testing method. The cyclic electromechanical behavior of the samples was tested with the simultaneous use of the tensile tester and a custom-built resistance measurement system (Tampere University, Tampere, Finland). In the cyclic electromechanical tests, the movement speed of the upper clamp was 240 mm/min.
A custom-built resistance measurement system was constructed using an Arduino Uno board. The system used Arduino Uno’s 10-bit AD converter for two-wire measurements to calculate real-time voltage values over the samples, which were converted to resistance values and recorded. The system had three measurement channels that used 3470 Ω resistors as a reference. Based on the reference resistor values, the system’s accuracy was ±3 Ω. A threshold of 3000 Ω was used to indicate the total sample failure. The probes of the resistance measurement system were fixed to the samples’ contacts with anisotropic conductive adhesive film (ACF), and were further clamped to ensure stable electrical connections.
Since the conducting material’s structure is not homogeneous but is rather an interconnected network of fibers with small contact points between the fibers, the current density may influence the sample’s resistance. Nevertheless, no such effect was observed with the low (less than 100 mA) measured DC currents. With higher frequencies (in MHz range) or high currents (several A), the influence of current density on the resistance would probably be observed, in alignment with previously reported results [
31].
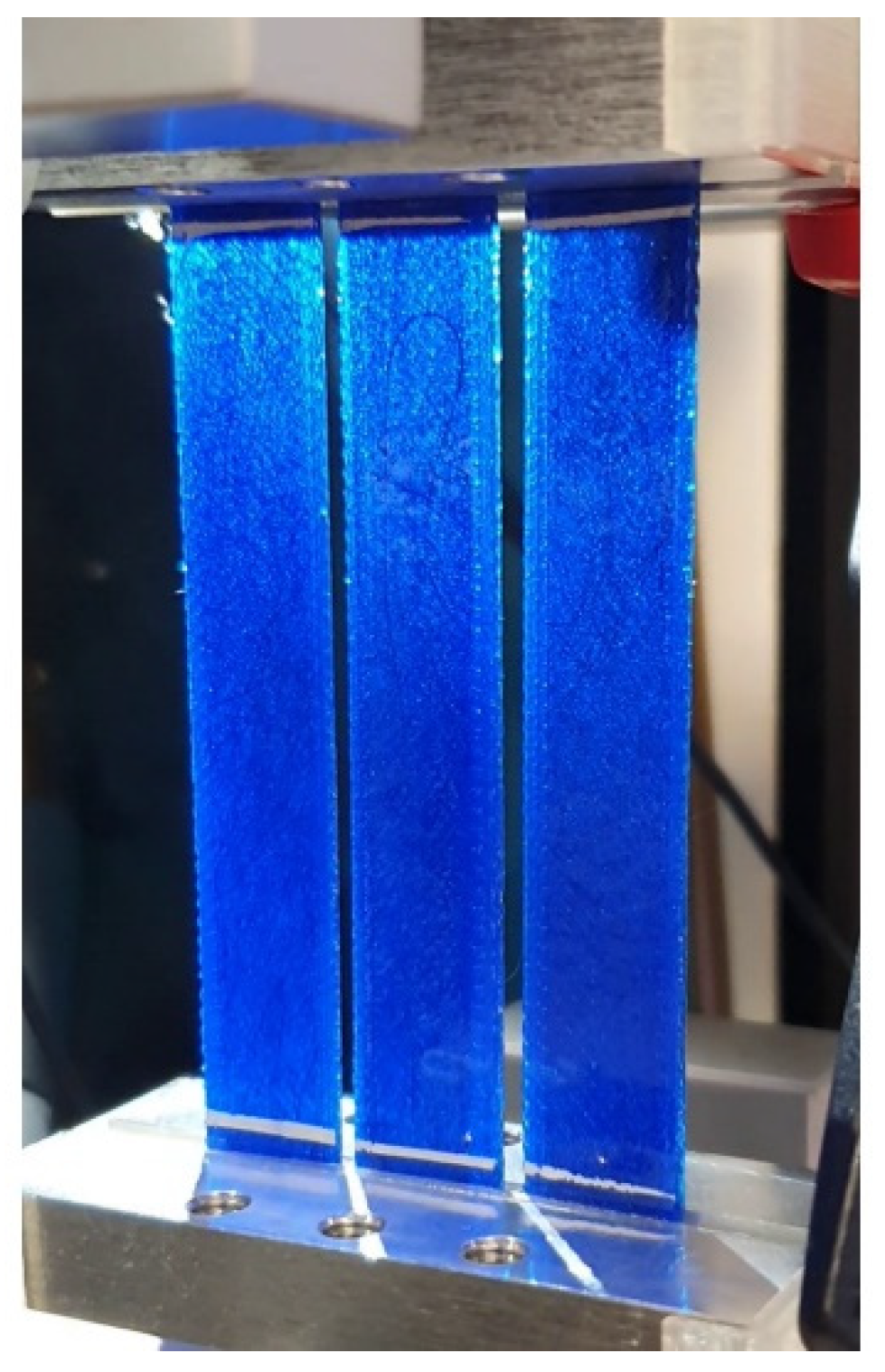
In the cyclic tests, three samples from the same category were fixed together in the 50-mm-wide clamps and simultaneously stretched 10,000 times. During testing, the tensile tester measured the average force and displacement of three samples, and the resistance measurement system measured each sample’s resistance. For every sample series in
Table 1, five degrees of tensile deformations were tested (10%, 20%, 30%, 40%, and 50%), and 25 cyclic tests were conducted.
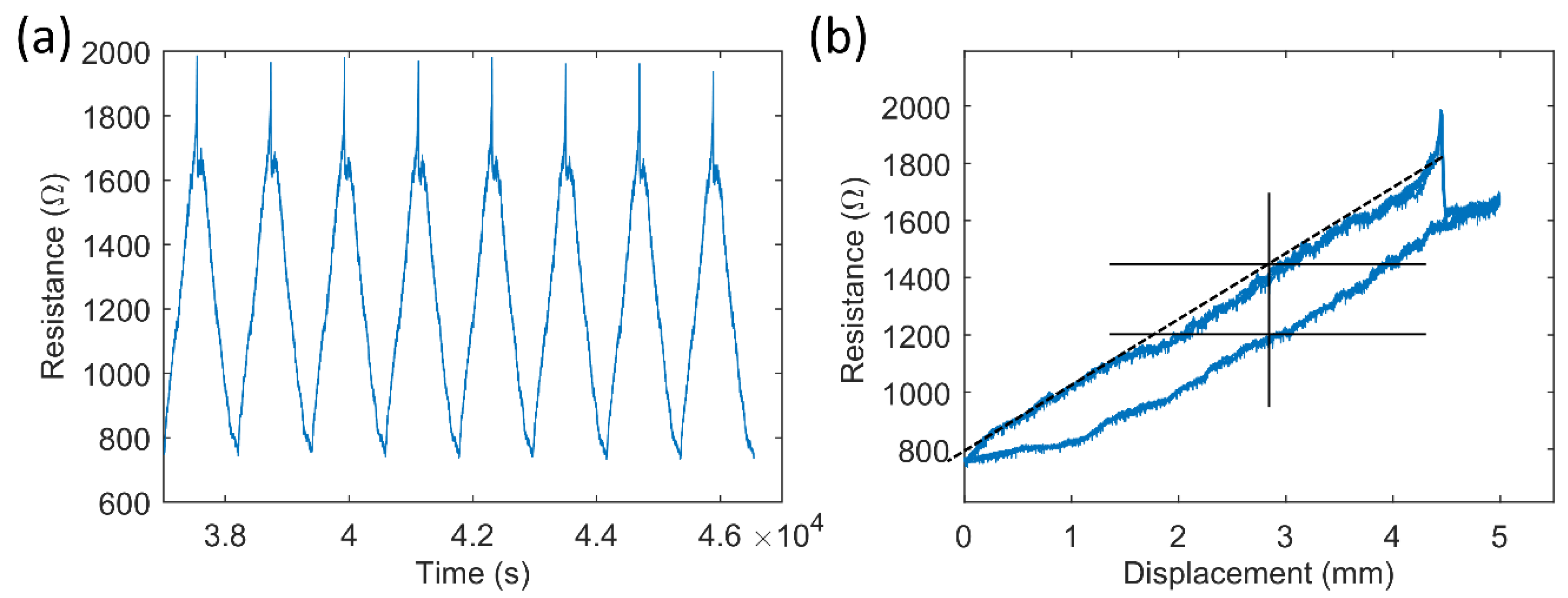
Figure 2 presents the clamped cyclic test samples with background light. After the cyclic tests, a strain sensor test was carried out with the cyclic test setup and a previously tested (50% elongated) cyclic test sample with a 153 µm nominally thick carbon fiber layer. The sample was elongated repeatedly up to 10% with a speed of 0.5 mm/min.
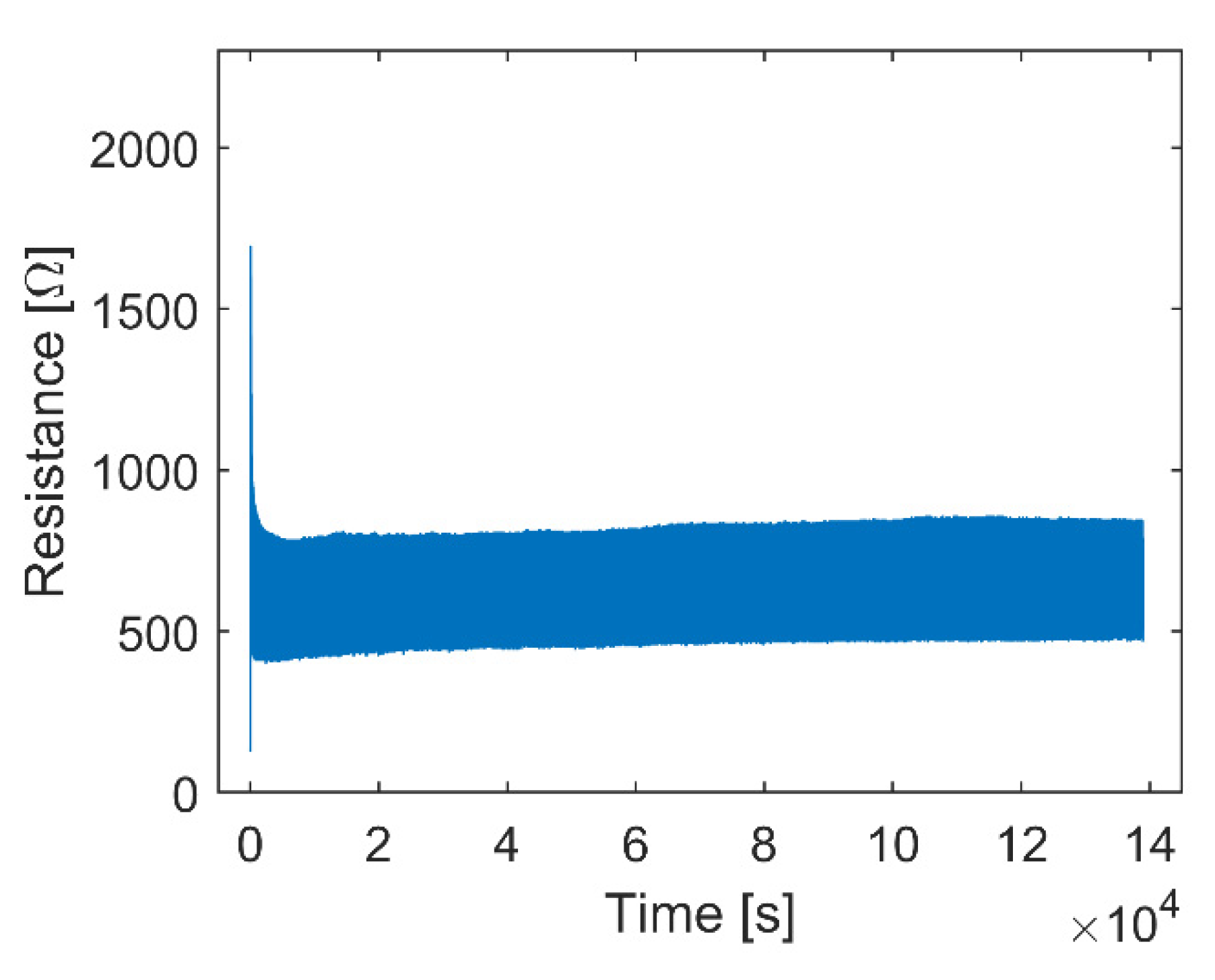
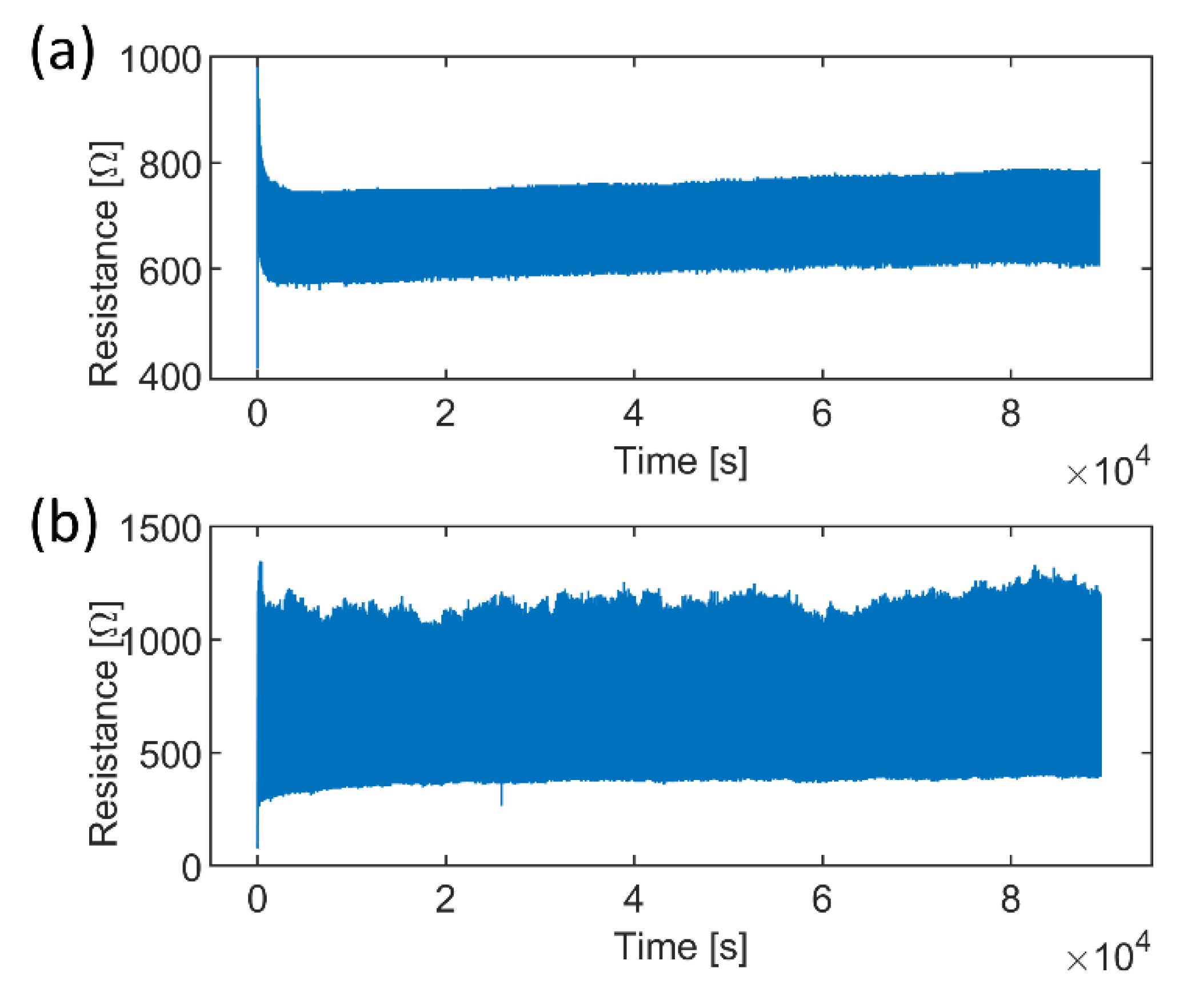
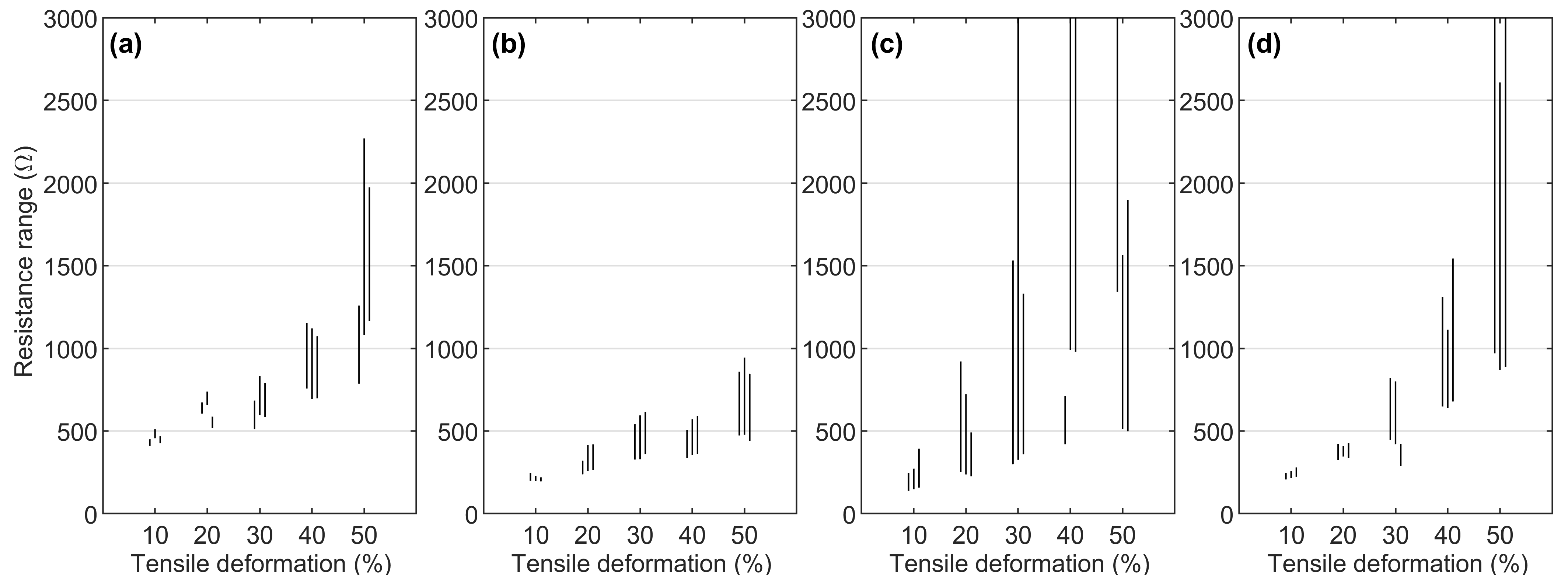
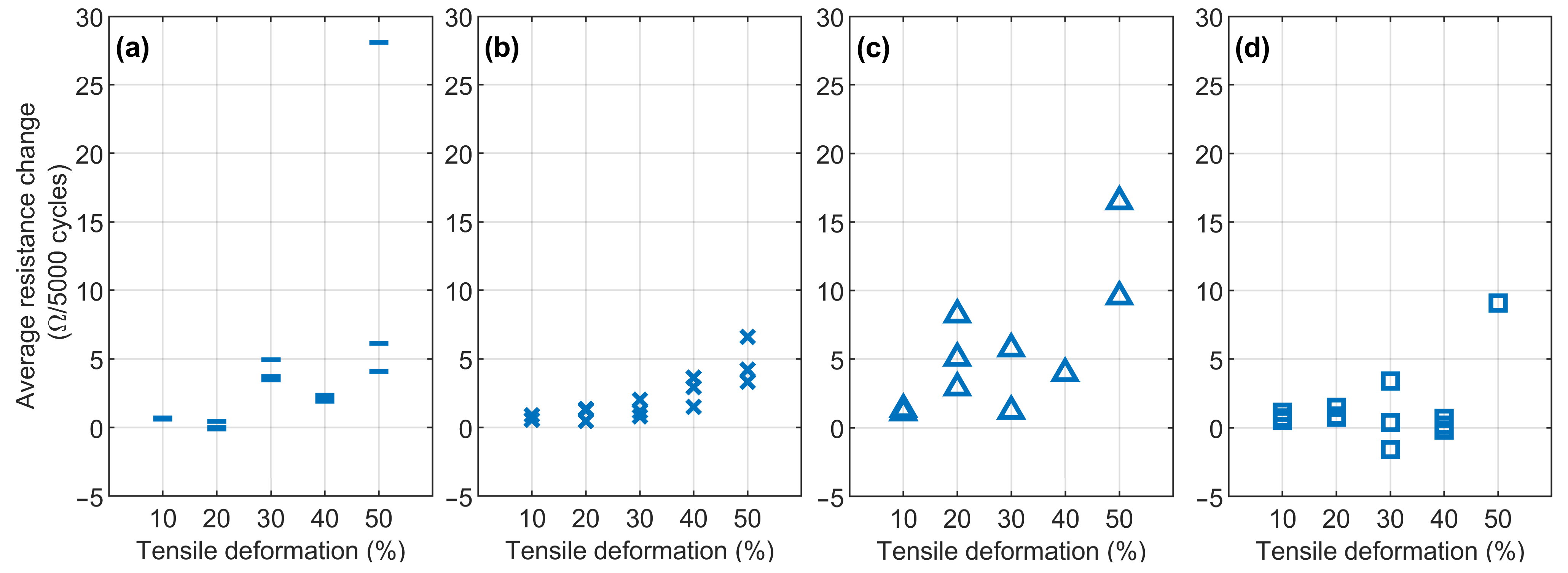
The cyclic test analysis was performed using Matlab (version R2021b, MathWorks, Inc., Natick, MA, USA). Maximum and minimum resistance values during cyclic loading were extracted from the test data by averaging the steady-state results obtained after the first thousand cycles, and a high variation in the sample resistance was observed, presumably due to fiber reorientation in the CFC layer. The change in the samples’ resistance was then calculated based on the two parameters extracted above. Furthermore, the average change in the resistance of the cyclically loaded samples was calculated by dividing the testing time into ten cycle periods and calculating the average resistances of each period. After that, the average resistance data from the last 5000 cycles, with which the increase in resistance versus the cycle could be linearized, were fitted using a linear relationship through the polyfit Matlab function (n = 1) to obtain the average resistance change per cycle.
2.4. DIC Analyzes
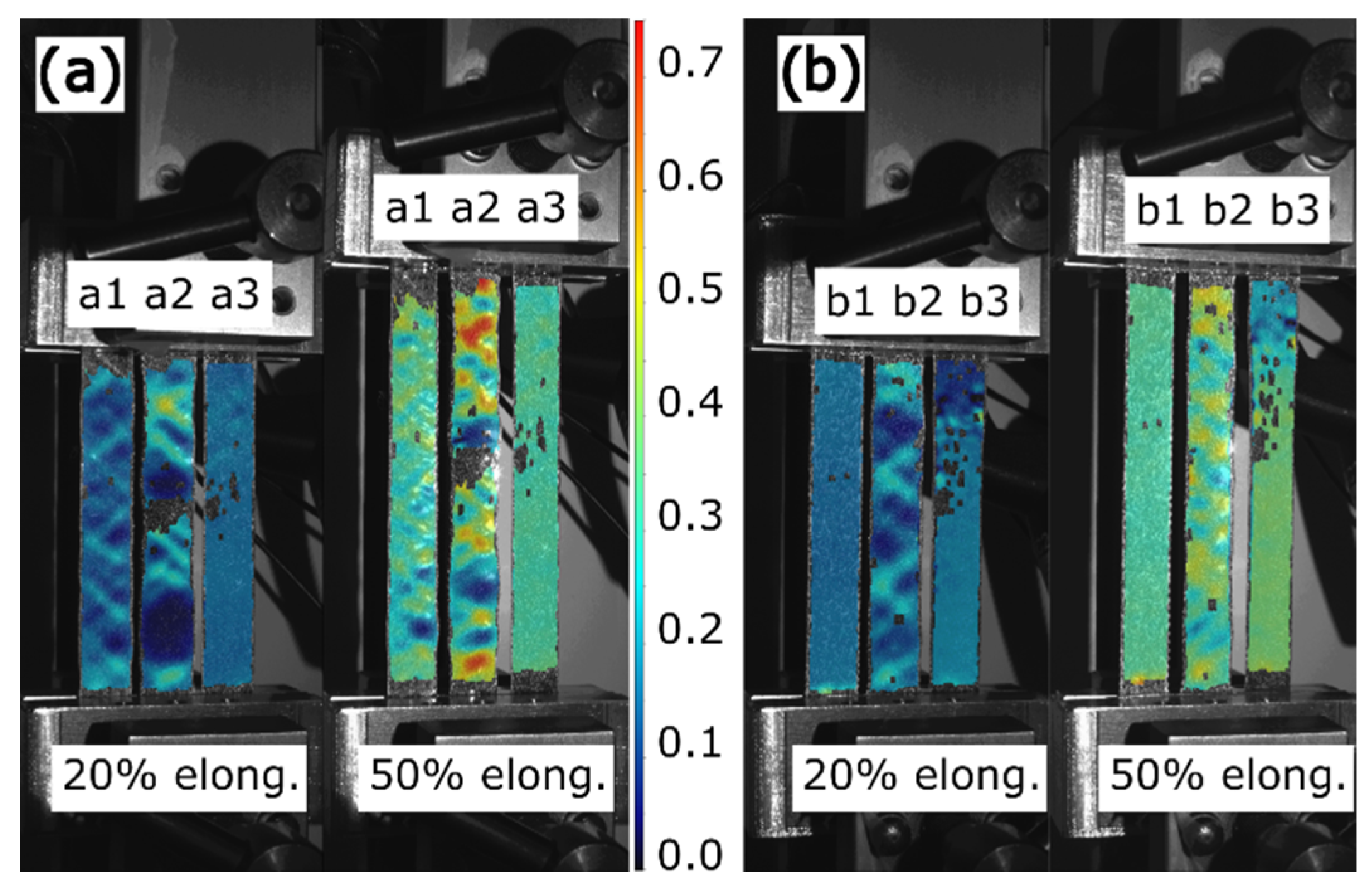
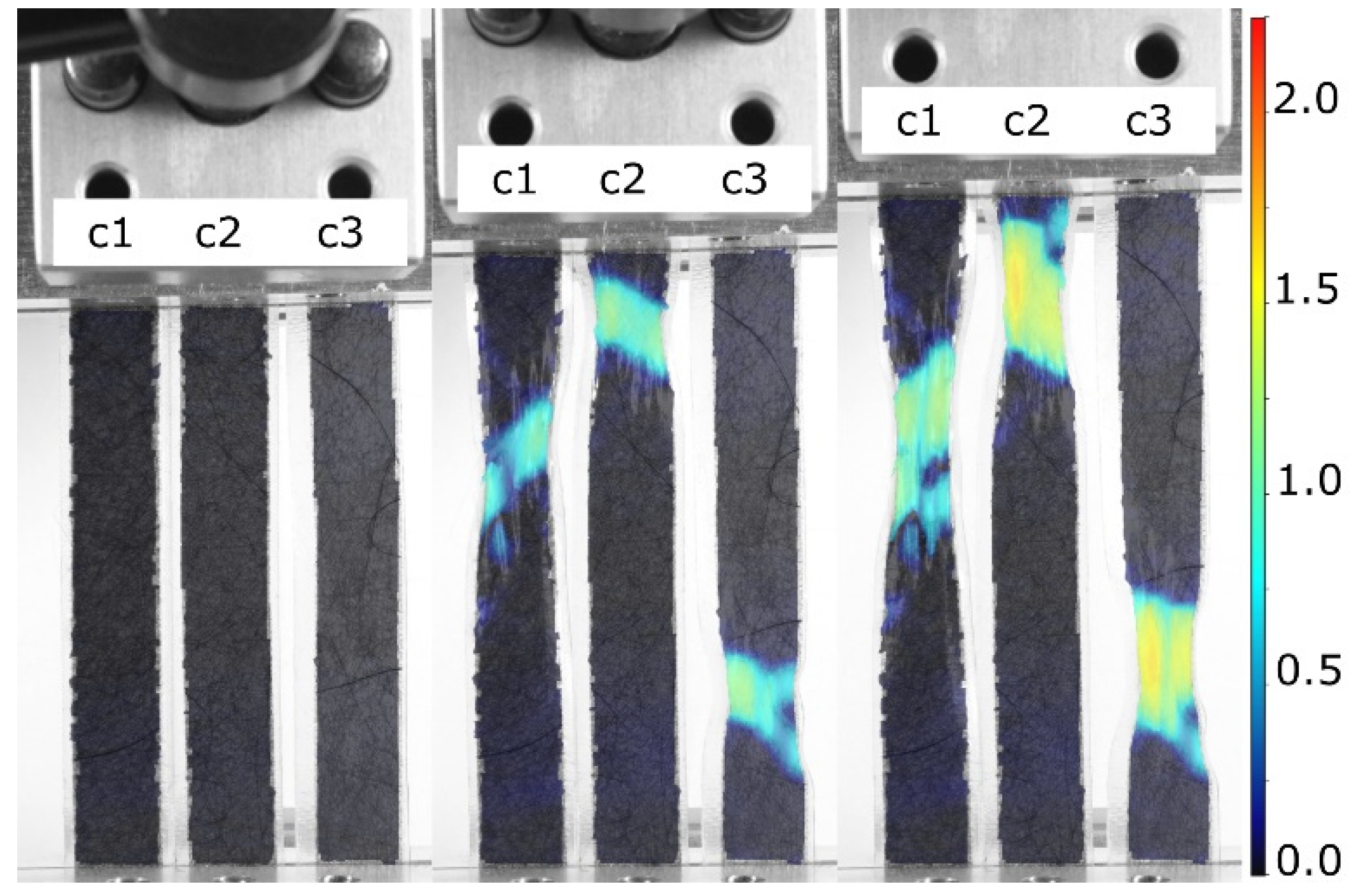
To further analyze the electromechanical properties of the samples, DIC was used for separate cyclic tests to inspect surface deformations of the samples in 100 early cycles, in which the largest resistance changes typically occur. The surfaces of the samples were studied and compared in the first, 50th, and 100th cycles. For this purpose, the deformation of the samples during loading was recorded using the stereo 3D DIC imaging system 3D StrainMaster Compact 5M (LaVision GmbH, Göttingen, Germany) and analyzed using DaVis software (version 10.2.1, LaVision GmbH, Göttingen, Germany). The strain measure used through the DIC analyses—and thus the one shown in the figures in this work—was the logarithmic (Hencky) strain. For DIC, the speed of the upper clamp was 50 mm/min, and the maximum elongation of the samples was 50% (25 mm).
The CFC pieces were studied with DIC without the 3D-printed TPU matrix to observe the mechanical limits of the fabricated CFC pieces more closely. In these samples, each CFC piece was laminated between two clear TPU films (Platilon U 4201 AU by Covestro). The thickness of the films was 100 μm, width 10 mm, and length 200 mm. The film was transparent and notably more deformable under the same load levels compared to the 1-mm-thick 3D-printed TPU matrix, enabling the evaluation of the deformation of the CFC pieces.
5. Conclusions
Adding CFCs into the 3D printing process of a deformable TPU matrix represents a new way to make electrically conductive, stretchable, and wearable 3D-printed electronic devices. This method differs from current methods due to the possibility of creating structures with stretchability, excellent conductivity, printing accuracy, and isotropic layers. After studying the sample series during their fabrication phase, with single pull-up tests, electromechanical cyclic tests, and finally by analyzing them with DIC, the benefits of the addition of CFCs into the 3D-printed deformable matrix are obvious.
The results showed that the TPU matrix with just one nominally 53-µm-thin CFC layer provided 1500 S/m of conductivity—a result which has not been achieved with other carbon additives in the FFF process. When the thickness and number of interface areas were increased, the resistance of the CFC layers decreased to 5 Ω/10 mm, which has been conventionally achieved in the stretchable electronics field only with the use of metal-based materials.
The electromechanical properties of the CFC samples varied according to the thickness and structure of the CFC pieces, enabling versatile applications. The use of a thin and permeable CFC piece could support more stable and durable mechanical features, enabling the structure to deform based on the properties of the 3D-printed TPU matrix. The thick and multilayered CFC piece exhibited better electrical properties with low resistance and good mechanical stability, and the CFC’s stiffness governed the structure’s deformation. Between these extremes, the sample series with two thin CFCs and one interface area between the CFC plies demonstrated more balanced electromechanical properties. Small 45° failure bands with long carbon fibers absorbed tensile deformations while maintaining stable electrical properties.
These results show the potential of this novel production method to create 3D-printed stretchable electronics that can withstand high levels of deformation in a single pulling experiment and in numerous cycles. The use of one thin CFC increased the stiffness of the elastic phase but did not affect the plastic phase of 3D printed samples. The use of a high amount of CFCs increased the stiffness considerably and resulted in an irregular plastic phase, in which a 20% force decline was possible. In the cyclic testing, the samples with one thin CFC or two thin CFCs layers could reach even higher elongation than that measured at 50% for 10,000 cycles. This fabrication approach is easy to incorporate into current 3D printing practices, enabling the preparation of 3D-printed stretchable and wearable electronics with commercially available materials and methods. Varying the thickness and number of CFCs added into the 3D-printed matrix allows one to optimize the structures’ properties for different purposes. Additive-manufactured deformable CFC electronics can be used, for example, in sensors, interconnects, and circuit boards.
The use of CFCs inside 3D-printed structures has advantages, for example, using one thin CFC in several layers in FFF so that every printing layer adheres to only one layer of a thin CFC can be implemented to make highly reinforced structures that elongate steadily and which have intermediate electrical conductivity. Moreover, the CFCs on multiple layers can be shaped differently, enabling simple 3D PCBs that are stretchable and wearable. However, the manufacturing parameters of 3D-printed TPU matrices and CFCs of differing thicknesses require further optimization for sensor applications. Furthermore, the placement method of CFCs needs to be automated, for instance, with the use of a modified pick-and-place machine.

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}