


Design and Implementation of a Fully-Actuated Integrated Aerial Platform Based on Geometric Model Predictive Control



Abstract
:1. Introduction
Motivation and Background
- A control scheme is carefully designed such that it is singularity-free and can deal with the non-Euclidean configuration space, state and input constraints, hence is suitable for the IAP system. The control scheme is designed based on model predictive control and the dynamics of the IAP.
- The stability of the IAP under the control of the proposed MPC-based controller along with the existing flight controller of each individual sub-UAV is proved. This provides theoretical basis for the development of the IAP.
- By developing the hardware and the software system of the IAP, the proposed control scheme is successfully implemented in a prototype of IAP. To the best of the authors’ knowledge, this is the first time that the geometric model predictive control-based control scheme was successfully implemented in the real IAP prototype. The advantage of the proposed control scheme is shown through the comparison.
2. Configuration and Dynamic Modeling of IAP
3. Controller Design and Analysis
3.1. Overall Architecture
3.2. Outer Loop of the MPC Controller
3.2.1. Terminal Set Constraints and Terminal Control of Attitude Motion
- (1)
- is invariant,
- (2)
- , wherewhere , , and r are all positive constants.
- (3)
- holds for all .
3.2.2. Terminal Set Constraints and Terminal Control of Position Motion
- (1)
- is invariant.
- (2)
- , wherewhere , , and are all positive constants.
- (3)
- holds for all .
3.3. Solvability and Stability of the Closed Loop IAP
4. Simulation and Real-World Tests
4.1. Simulation System Construction
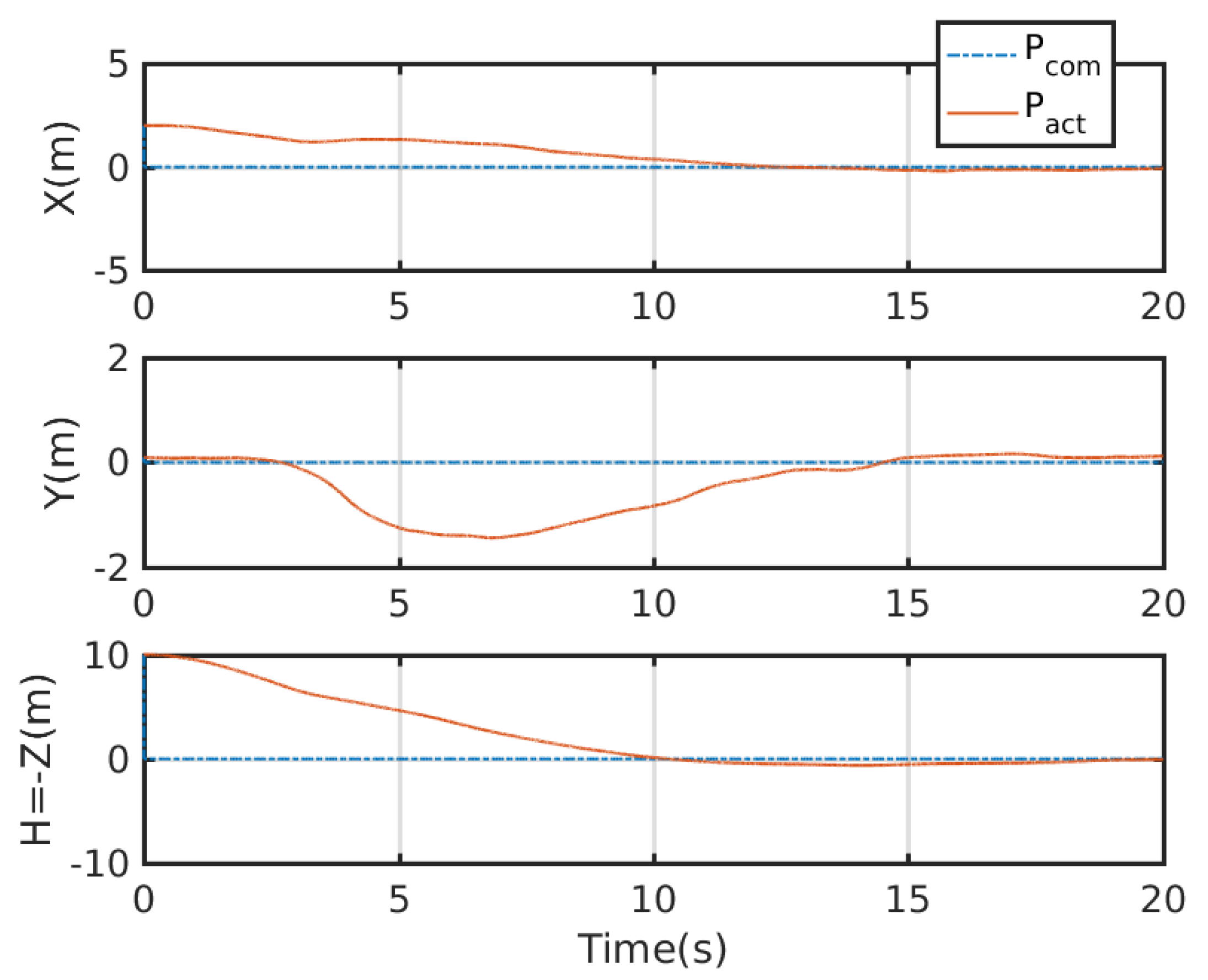
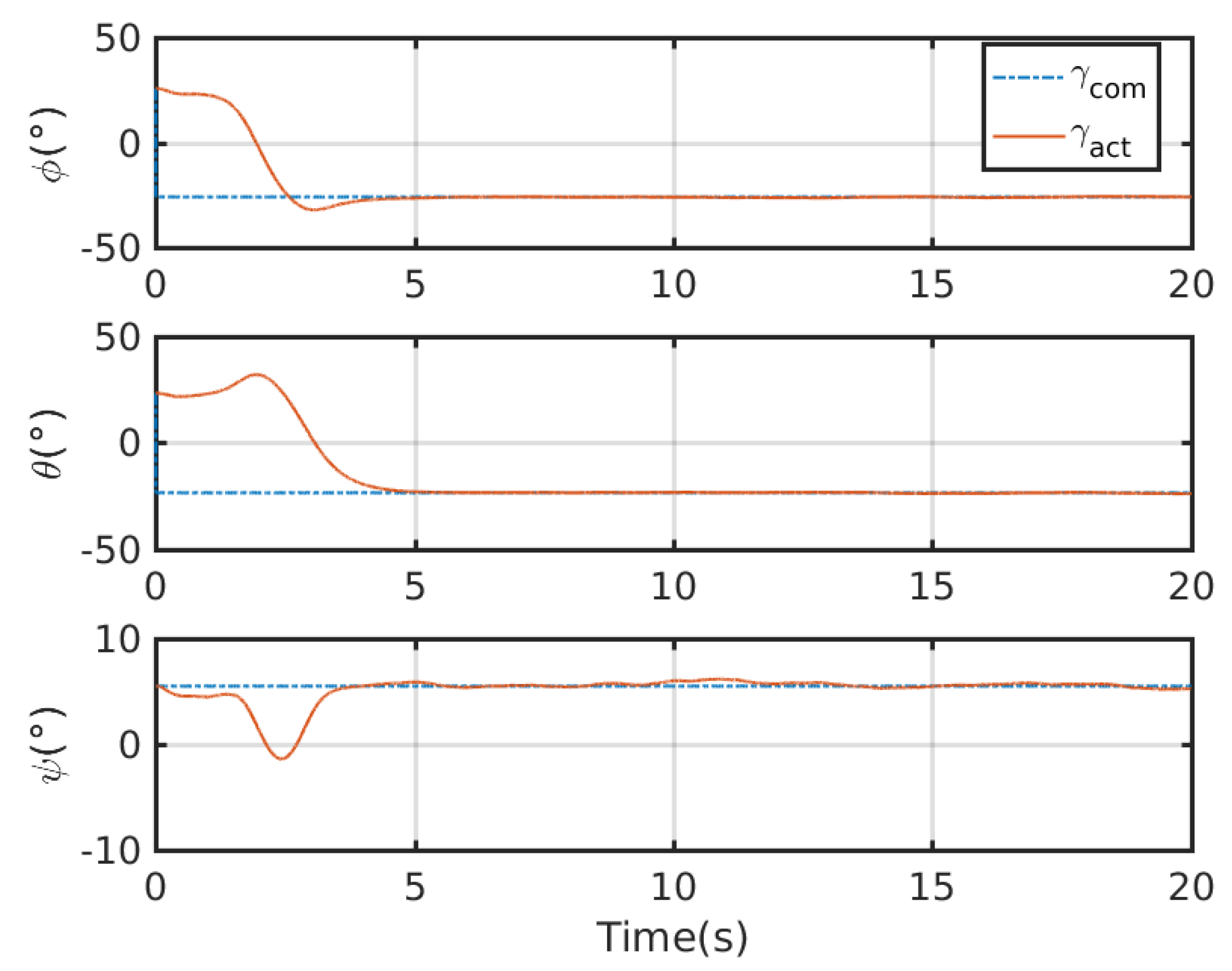
4.2. Simulation Results
4.3. Development of an IAP Prototype Consisting of Software and Hardware Systems
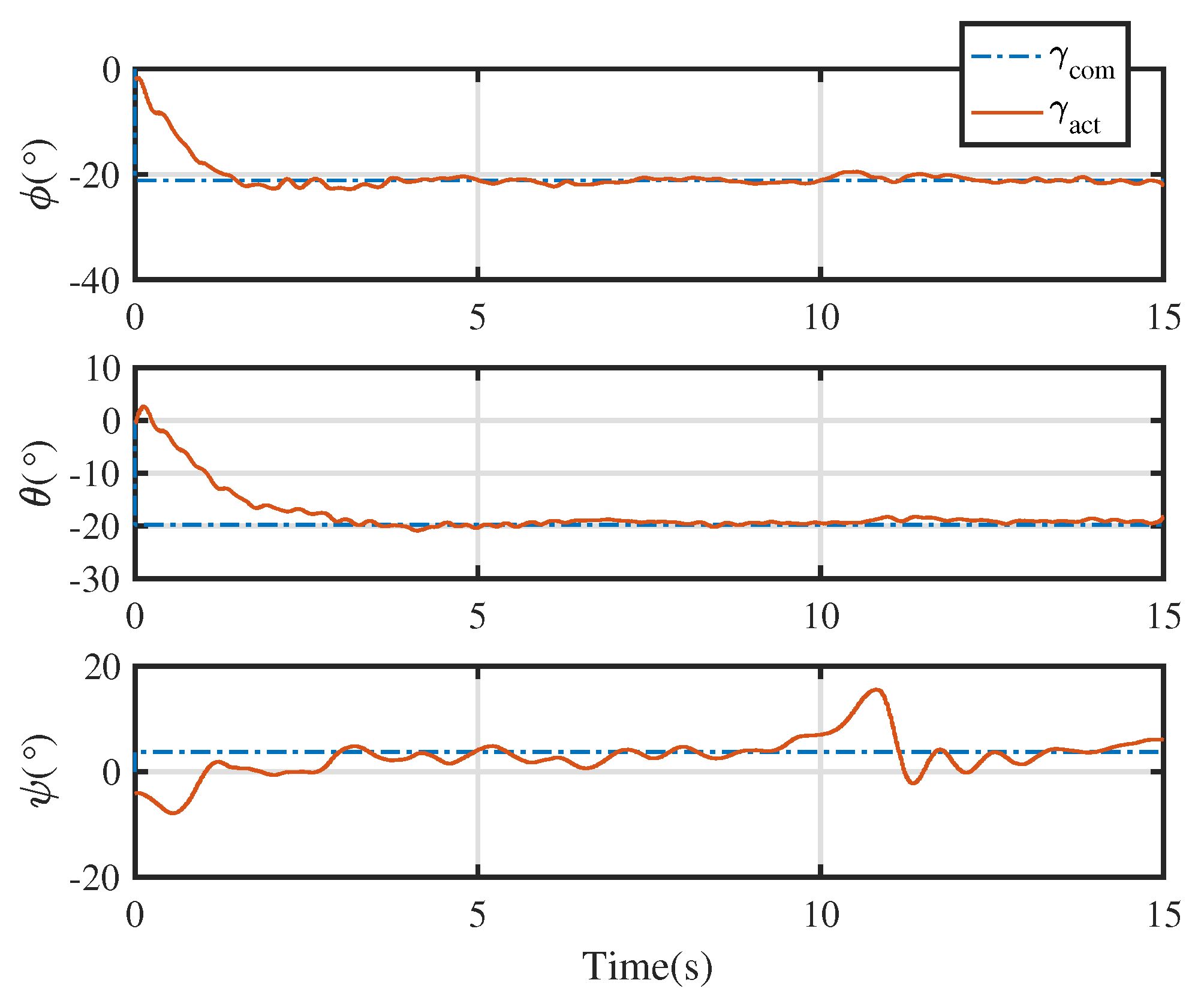
4.4. Real-World Test Results
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Kim, S.J.; Lee, D.Y.; Jung, G.P.; Cho, K.J. An origami-inspired, self-locking robotic arm that can be folded flat. Sci. Robot. 2018, 3, eaar2915. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Estrada, M.A.; Mintchev, S.; Christensen, D.L.; Cutkosky, M.R.; Floreano, D. Forceful manipulation with micro air vehicles. Sci. Robot. 2018, 3, eaau6903. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Xilun, D.; Pin, G.; Kun, X.; Yushu, Y. A review of aerial manipulation of small-scale rotorcraft unmanned robotic systems. Chin. J. Aeronaut. 2019, 32, 200–214. [Google Scholar]
- Ruggiero, F.; Lippiello, V.; Ollero, A. Aerial manipulation: A literature review. IEEE Robot. Autom. Lett. 2018, 3, 1957–1964. [Google Scholar] [CrossRef] [Green Version]
- Jimenez-Cano, A.E.; Sanchez-Cuevas, P.J.; Grau, P.; Ollero, A.; Heredia, G. Contact-based bridge inspection multirotors: Design, modeling, and control considering the ceiling effect. IEEE Robot. Autom. Lett. 2019, 4, 3561–3568. [Google Scholar] [CrossRef]
- Orsag, M.; Korpela, C.; Bogdan, S.; Oh, P. Dexterous aerial robots—Mobile manipulation using unmanned aerial systems. IEEE Trans. Robot. 2017, 33, 1453–1466. [Google Scholar] [CrossRef]
- Zhang, G.; He, Y.; Dai, B.; Gu, F.; Yang, L.; Han, J.; Liu, G.; Qi, J. Grasp a moving target from the air: System & control of an aerial manipulator. In Proceedings of the 2018 IEEE International Conference on Robotics and Automation (ICRA), Brisbane, QLD, Australia, 21–25 May 2018; IEEE: Piscataway, NJ, USA, 2018; pp. 1681–1687. [Google Scholar]
- Lippiello, V.; Fontanelli, G.A.; Ruggiero, F. Image-based visual-impedance control of a dual-arm aerial manipulator. IEEE Robot. Autom. Lett. 2018, 3, 1856–1863. [Google Scholar] [CrossRef]
- Yu, Y.; Wang, K.; Guo, R.; Lippiello, V.; Yi, X. A framework to design interaction control of aerial slung load systems: Transfer from existing flight control of under-actuated aerial vehicles. Int. J. Syst. Sci. 2021, 52, 2845–2857. [Google Scholar] [CrossRef]
- Welde, J.; Paulos, J.; Kumar, V. Dynamically feasible task space planning for underactuated aerial manipulators. IEEE Robot. Autom. Lett. 2021, 6, 3232–3239. [Google Scholar] [CrossRef]
- Yu, Y.; Li, P.; Gong, P. Finite-time geometric control for underactuated aerial manipulators with unknown disturbances. Int. J. Robust Nonlinear Control. 2020, 30, 5040–5061. [Google Scholar] [CrossRef]
- Park, S.; Lee, J.; Ahn, J.; Kim, M.; Her, J.; Yang, G.H.; Lee, D. ODAR: Aerial Manipulation Platform Enabling Omnidirectional Wrench Generation. IEEE/ASME Trans. Mechatron. 2018, 23, 1907–1918. [Google Scholar] [CrossRef]
- Park, S.; Lee, Y.; Heo, J.; Lee, D. Pose and posture estimation of aerial skeleton systems for outdoor flying. In Proceedings of the 2019 International Conference on Robotics and Automation (ICRA), Montreal, QC, Canada, 20–24 May 2019; pp. 704–710. [Google Scholar]
- Nguyen, H.; Park, S.; Park, J.; Lee, D. A Novel Robotic Platform for Aerial Manipulation Using Quadrotors as Rotating Thrust Generators. IEEE Trans. Robot. 2018, 34, 353–369. [Google Scholar] [CrossRef]
- Yu, Y.; Shi, C.; Shan, D.; Lippiello, V.; Yang, Y. A Hierarchical Control Scheme for Multiple Aerial Vehicle Transportation Systems with Uncertainties and State/Input Constraints. Appl. Math. Model. 2022, 109, 651–678. [Google Scholar] [CrossRef]
- Lee, T. Geometric Control of Quadrotor UAVs Transporting a Cable-Suspended Rigid Body. IEEE Trans. Control Syst. Technol. 2018, 26, 255–264. [Google Scholar] [CrossRef]
- Six, D.; Briot, S.; Chriette, A.; Martinet, P. The Kinematics, Dynamics and Control of a Flying Parallel Robot with Three Quadrotors. IEEE Robot. Autom. Lett. 2018, 3, 559–566. [Google Scholar] [CrossRef] [Green Version]
- Sanalitro, D.; Tognon, M.; Cano, A.J.; Cortes, J.; Franchi, A. Indirect Force Control of a Cable-Suspended Aerial Multi-Robot Manipulator. IEEE Robot. Autom. Lett. 2022, 7, 6726–6733. [Google Scholar] [CrossRef]
- Kendoul, F. Nonlinear Hierarchical Flight Controller for Unmanned Rotorcraft: Design, Stability, and Experiments. J. Guigance Control Dyn. 2009, 32, 1954–1958. [Google Scholar] [CrossRef]
- Yu, Y.; Ding, X. A Global Tracking Controller for Underactuated Aerial Vehicles: Design, Analysis, and Experimental Tests on Quadrotor. IEEE/ASME Trans. Mechatron. 2016, 21, 2499–2511. [Google Scholar] [CrossRef]
- Lee, T. Geometric Tracking Control of the Attitude Dynamics of a Rigid Body on SO(3). In Proceedings of the American Control Conference, San Francisco, CA, USA, 29 June–1 July 2011; pp. 1200–1205. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Mass (kg) | Payload Capacity (kg) | Computing Unit | |
|---|---|---|---|
| Sub-UAV | 1.58 | 1.5 | PX4 open-source FCB |
| IAP | 6.24 | 3.02 | Nvidia nano OBC and PX4 open-source FCB |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shi, C.; Yu, Y. Design and Implementation of a Fully-Actuated Integrated Aerial Platform Based on Geometric Model Predictive Control. Micromachines 2022, 13, 1822. https://doi.org/10.3390/mi13111822
Shi C, Yu Y. Design and Implementation of a Fully-Actuated Integrated Aerial Platform Based on Geometric Model Predictive Control. Micromachines. 2022; 13(11):1822. https://doi.org/10.3390/mi13111822
Chicago/Turabian StyleShi, Chuanbeibei, and Yushu Yu. 2022. "Design and Implementation of a Fully-Actuated Integrated Aerial Platform Based on Geometric Model Predictive Control" Micromachines 13, no. 11: 1822. https://doi.org/10.3390/mi13111822
APA StyleShi, C., & Yu, Y. (2022). Design and Implementation of a Fully-Actuated Integrated Aerial Platform Based on Geometric Model Predictive Control. Micromachines, 13(11), 1822. https://doi.org/10.3390/mi13111822