1. Introduction
Compliant mechanisms have been adopted in several applications for centuries, because of several well-known advantages, such as the absence of sliding friction, backlash, and significant wear, with the advantage of requiring minimum effort assembly. The first complete and systematic description of their characteristics appeared in the literature about thirty years ago, around 1994, when Midha and Howell introduced a classification [
1] that has been used until today. Another significant step forward in developing the compliant mechanisms was taken a couple of years later, when the Pseudo-Rigid-Body equivalent Model (PRBM) was introduced to evaluate the elasticity of compliant mechanisms with significant deflection capabilities [
2]. More materials concerning the compliant mechanisms were presented in 2001 [
3].
Compliant mechanisms are nowadays used in many fields [
4], as, for instance, for the development of aerospace [
5] and biomedical [
6,
7] devices, compliant bistable mechanisms [
8,
9,
10,
11], grasping and releasing micro-objects devices [
12], precision engineering [
13], MEMS [
14,
15,
16,
17,
18,
19], polishing and deburring [
20,
21,
22], lab-on-chip micro and nanosystems [
23], and automotive devices [
24,
25].
The actual configuration of a compliant mechanism depends not only on the applied forces and torques but also on its geometric characteristics, with kinematic and mechanical coupling and non-linearity problems that especially arise in case of large deformations.
A comprehensive survey on many recent techniques for modeling the kinetostatic and dynamic behavior of flexure-based compliant mechanisms has been recently presented [
26].
Kinetostatic models of complex plane compliant mechanisms have been developed in both micro and macro scale devices by using a wide variety of different linear and non-linear methods, such as, for only representative example, those based on: Loop-closure equations and the static equilibrium conditions for multi-loops compliant mechanisms [
27]; chained beam constraint model and geometric parameter optimization, specially conceived for translational motion [
28]; a combination of a beam constraint model, load equilibrium conditions, and geometric compatibility equations, specially conceived for 3-PPR compliant parallel mechanisms [
29]; a kinetostatic modeling approach that integrates the screw theory with the energy method, with consequent avoidance of the problem of finding a solution to the equilibrium equations of nodal forces and the possibility of taking into account the parasitic deformations in space [
30]; an extension of the chained beam constraint model specially revisited to analyze flexible beams of effective variable length [
31]; a mathematical formulation of the compliance matrix method, combined with the inverse kinematic, specially introduced for modeling the flexure-based parallel compliant mechanisms with multiple actuation forces [
32]; the adoption of three representations of multiple segments 2D beam models, namely, beam constraint model, linear Euler–Bernoulli beam, and PRBM [
33]; the adoption of a new two-colored digraph representation of planar flexure-based compliant mechanisms for the automatic generation of the kinetostatic equations [
34]; the introduction of virtual flexure hinges, link-flexure incidence matrices, and path matrices to generate automatically the formulation of the kinetostatic equations [
35].
A more specific contribution has been dedicated in 2013 [
36] to the solution of the problem of inverse kinetostatic analysis of a compliant four-bar linkage with flexible circular joints and pseudo-rigid bodies. This problem was attacked by extensively applying the theory of curved beams to the flexible parts, which gave rise to the closed-form symbolic expression of the compliance matrix, and by applying the static balance equations to both the elastic and pseudo-rigid parts.
The present investigation explores the opposite problem of direct kinetostatic analysis of a planar gripper with circular flexures. Two possible models based on the static balance of flexures are provided. The first linear model considers the static equilibrium in the undeformed configuration, while the second considers the balance in the deformed configuration. Both models simplify the fully non-linear model by exploiting a constant stiffness matrix of the undeformed curved beam element. These models allow us to find the tangent stiffness matrix in closed form as the sum of different contributions. Furthermore, dividing the tangent stiffness matrix into its contributions allows for evaluating each term’s importance and setting strategies to speed up convergence. Furthermore, through a validation process of the fully non-linear model results performed on a case study, it will be possible to ascertain how the simplifications still provide accurate values in almost the entire mechanism’s range of motion. As known, the tangent stiffness matrix is the heart of an iterative solving method. It is the basis of many implicit integrators widely used for the study of flexible mechanisms, such as the generalized
-method [
37] or the HHT-method [
38].
The main target of this article is to create two simplified models:
Solving the problem of the direct kinetostatic analysis of planar grippers with curved beams;
Being reliable in terms of motion accuracy and actuation forces;
Being computationally efficient to extend the formulation for real-time applications.
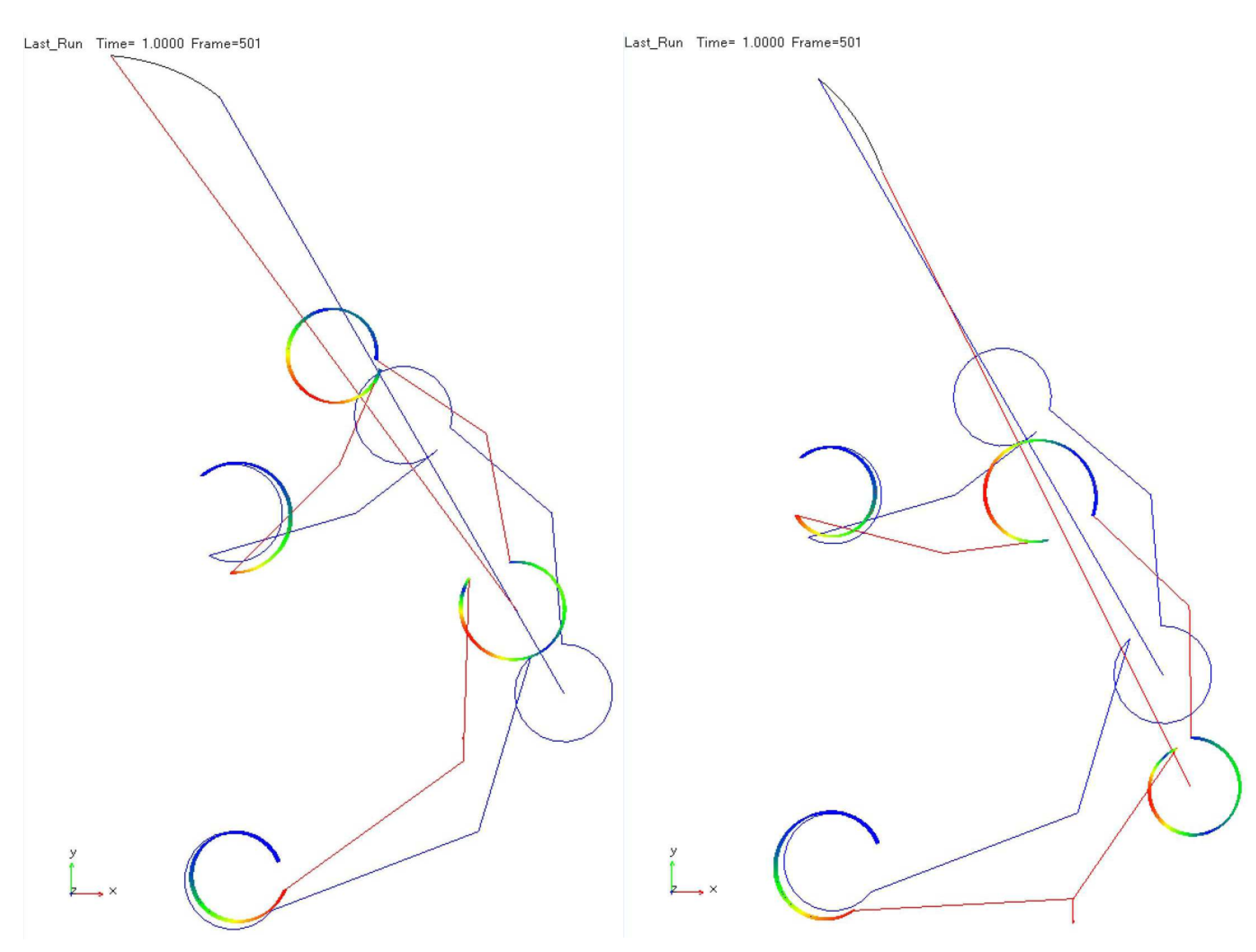
Any Finite Element Analysis (FEA) or Multibody Dynamics Simulation (MBDS) package is very reliable for solving any general problem in kinetostatic analysis numerically. Despite this, the availability of a ready-to-use independent algorithm to solve the direct kinetostatic problem gives rise to the possibility of implementing it in any real-time applications. Nevertheless, the MBDS Adams software has been used herein for validation purposes.
The paper is divided into the following sections.
Section 2 gives the fundamentals of the curved beam model.
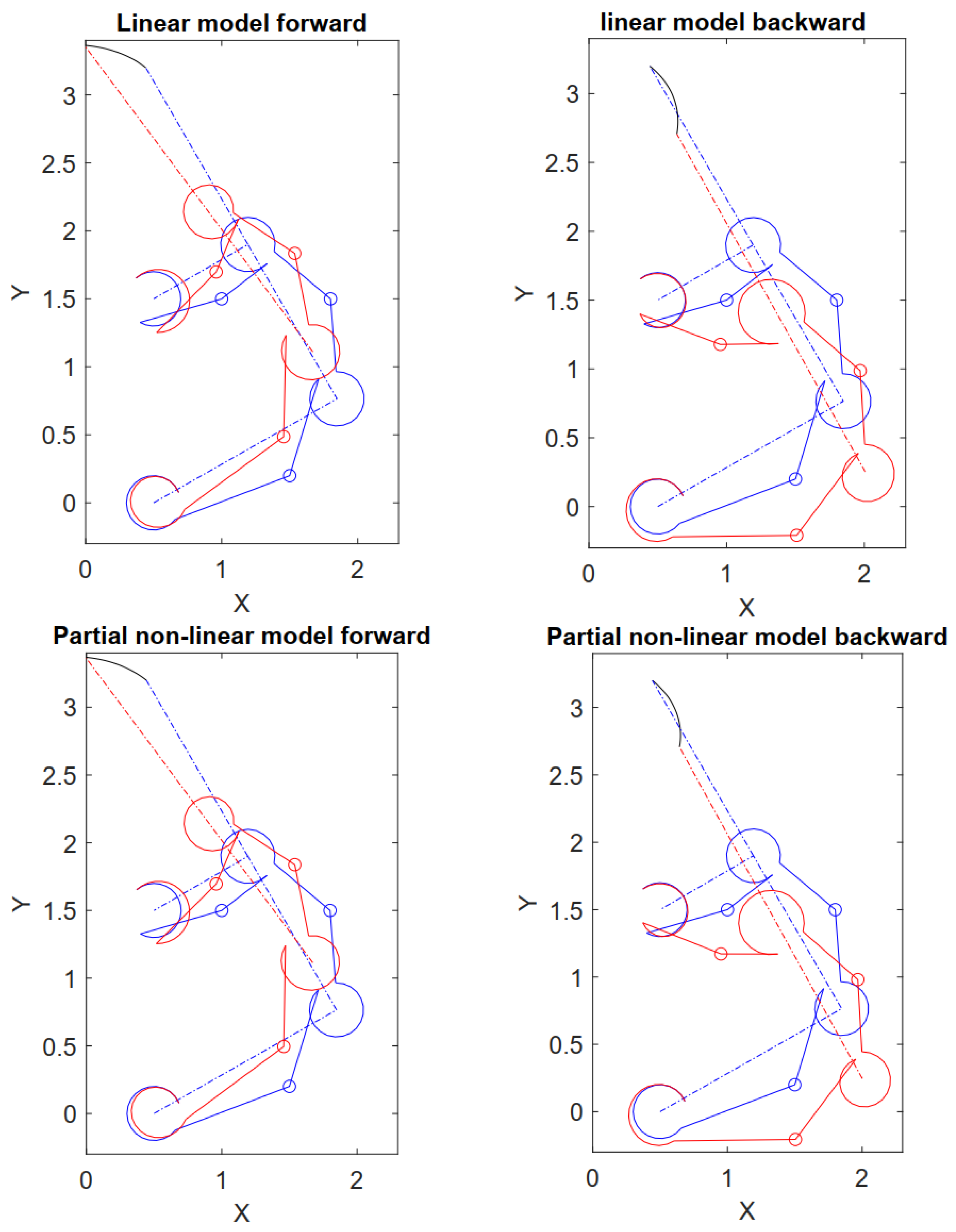
Section 3 outlines the kinetostatic analysis. Two simplified linear and partial non-linear models are developed, and their tangent stiffness matrices are obtained in closed form.
Section 4 includes a detailed case study description.
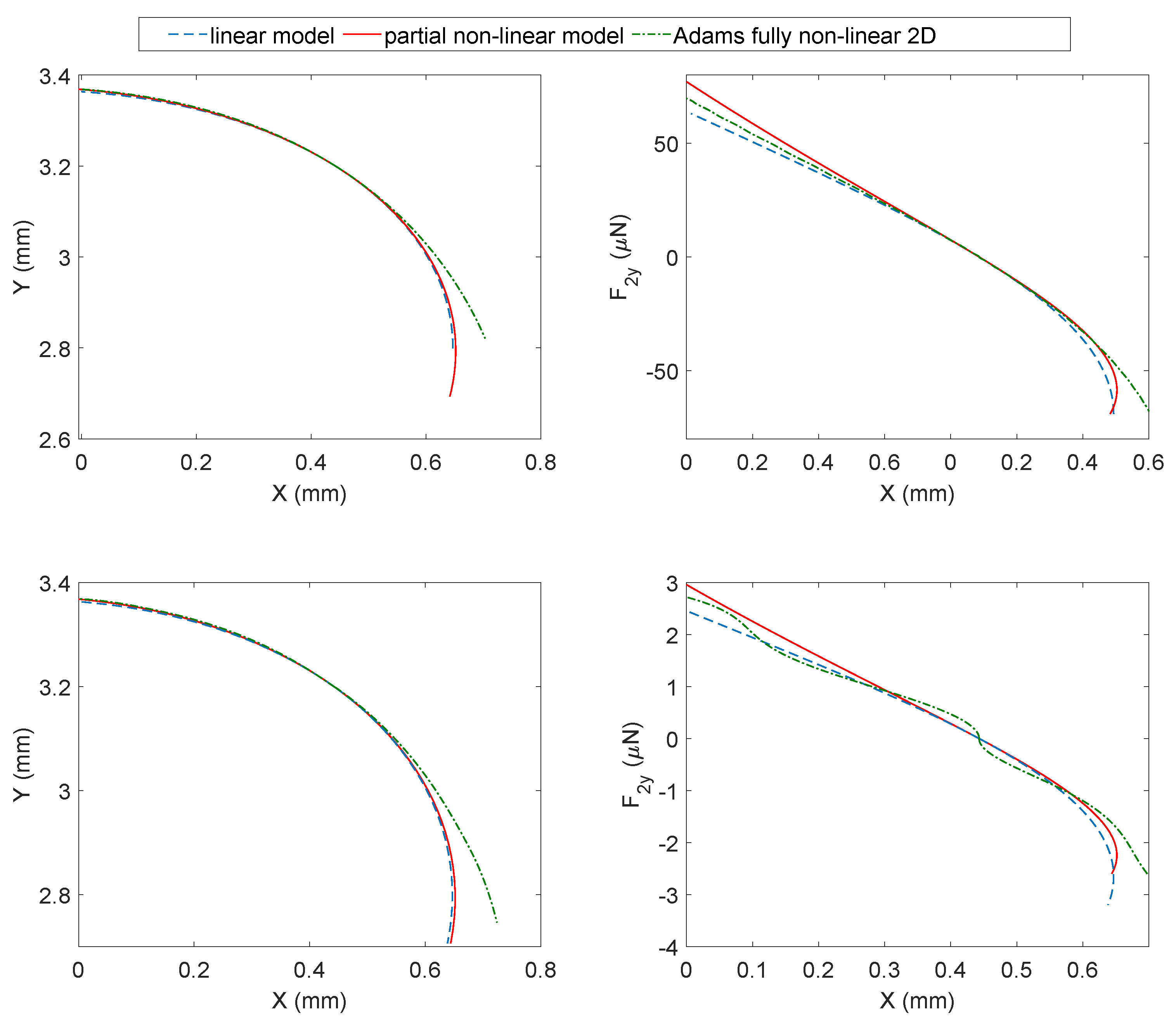
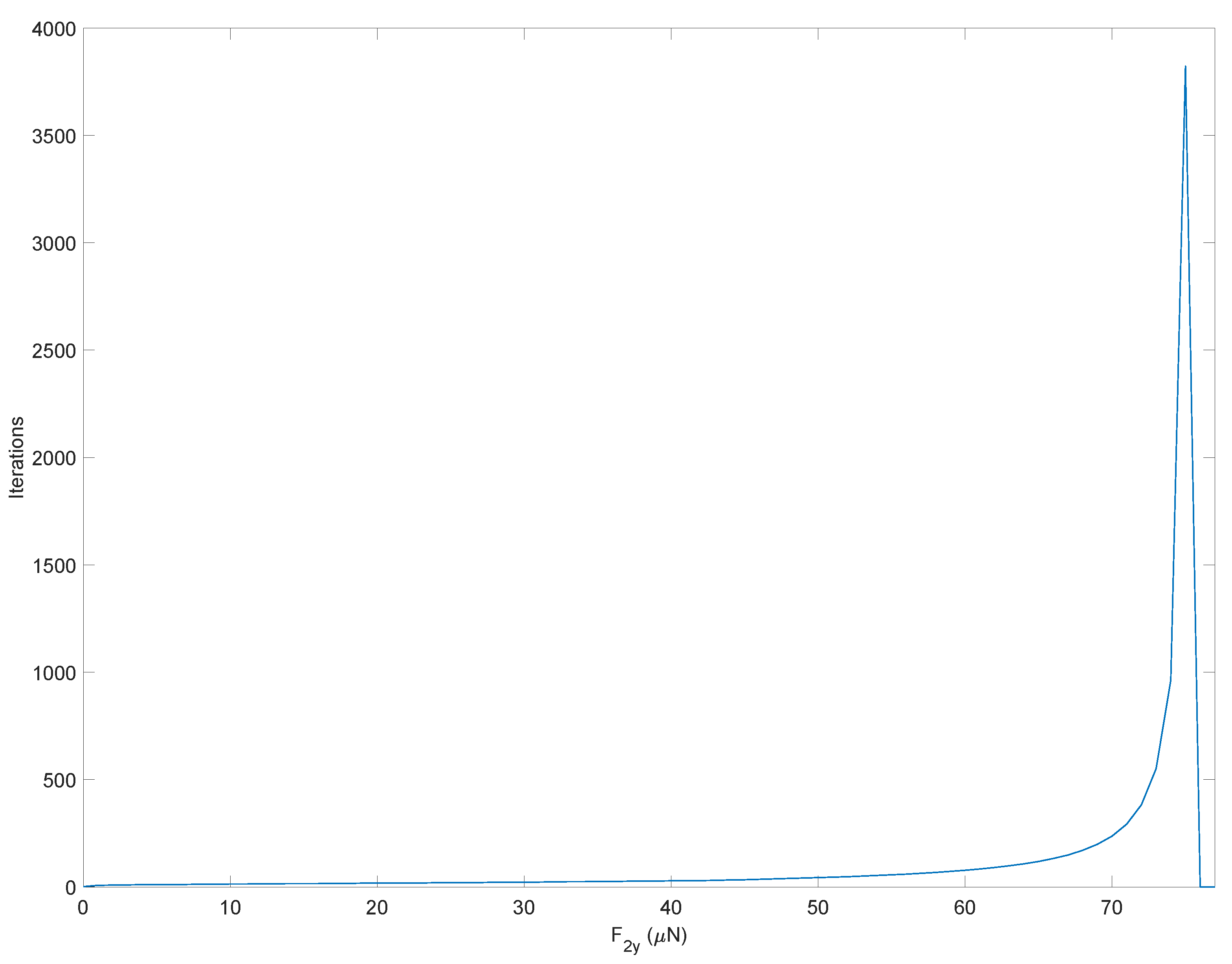
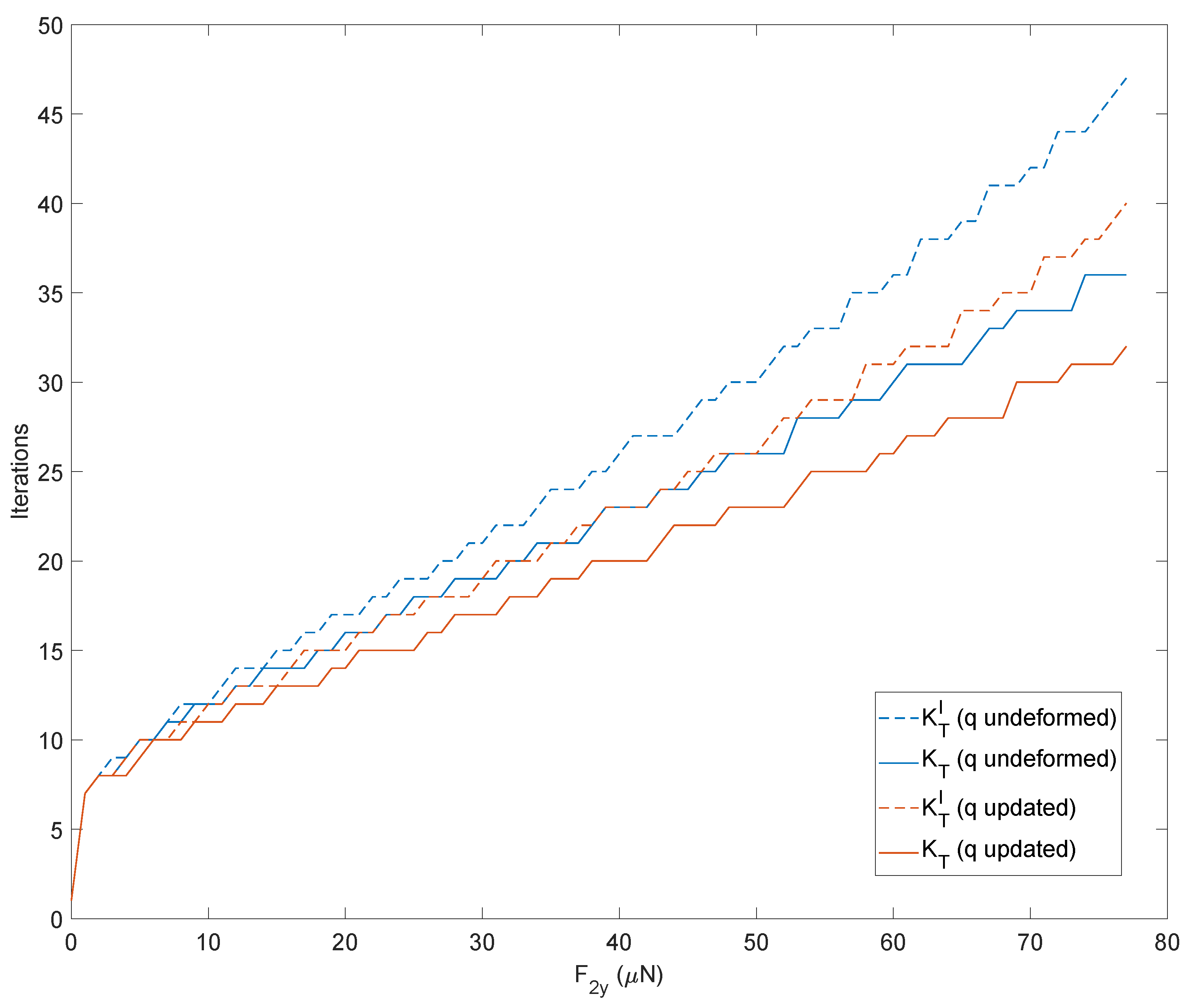
Section 5 compares and validates the two models and gives essential insights into convergence and computational burden. Finally,
Section 6 gives the concluding remarks.
2. The Adopted Curved Beam Model
Flexures employed in this context are curved beams. It has been demonstrated that curved beams can provide large rotations while maintaining small errors in terms of displacements of its center [
39], as it is typical for classic revolute pairs. This feature is important to guarantee finite rotations of the end-effector in monolithic structures such as MEMS-based grippers. Furthermore, a linear model is capable of faithfully reproducing the displacements and in-plane rotation of the curved beam tip up to rotations of approximately
. This feature has the considerable advantage of using a constant stiffness matrix, as will be recalled below.
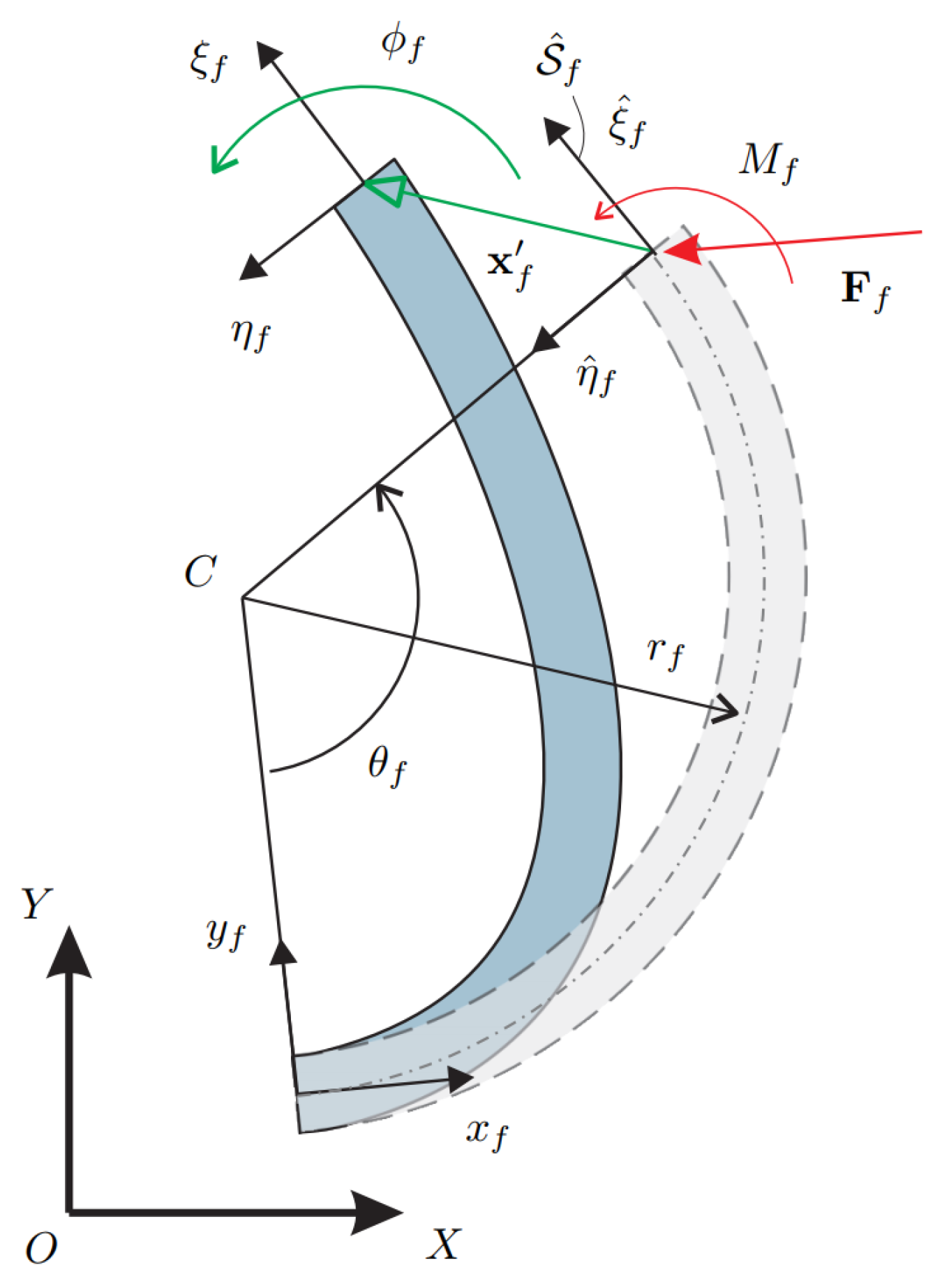
In the following, the curved beam compliance matrix, and its inverse stiffness matrix, will be recalled from [
36]. Let us consider a curved beam with a circular profile of radius
and beam characteristic angle
, as displayed in
Figure 1. First, let us consider the generalized displacement array
containing the displacement
and the rotation angle
of the end section due to the deformation. Then, introducing the generalized wrench array
containing the force vector and the torque applied to the end section, the compliance matrix
, derived in [
36], follows from
and depends only on the geometric and structural parameters of the curved beam, i.e.,
where
E is Young’s modulus and
I is the area moment of inertia, assumed both constant for the circular profile. In the following sections, the inverse of the compliance matrix
, i.e., the stiffness matrix
will be employed to write the kinetostatic equations of planar mechanisms with curved beams. Furthermore, the stiffness matrix will be expressed in its locale frame
attached to the end-section of the curved beam in the undeformed configuration, as shown in
Figure 1.
3. Kinetostatic Analysis
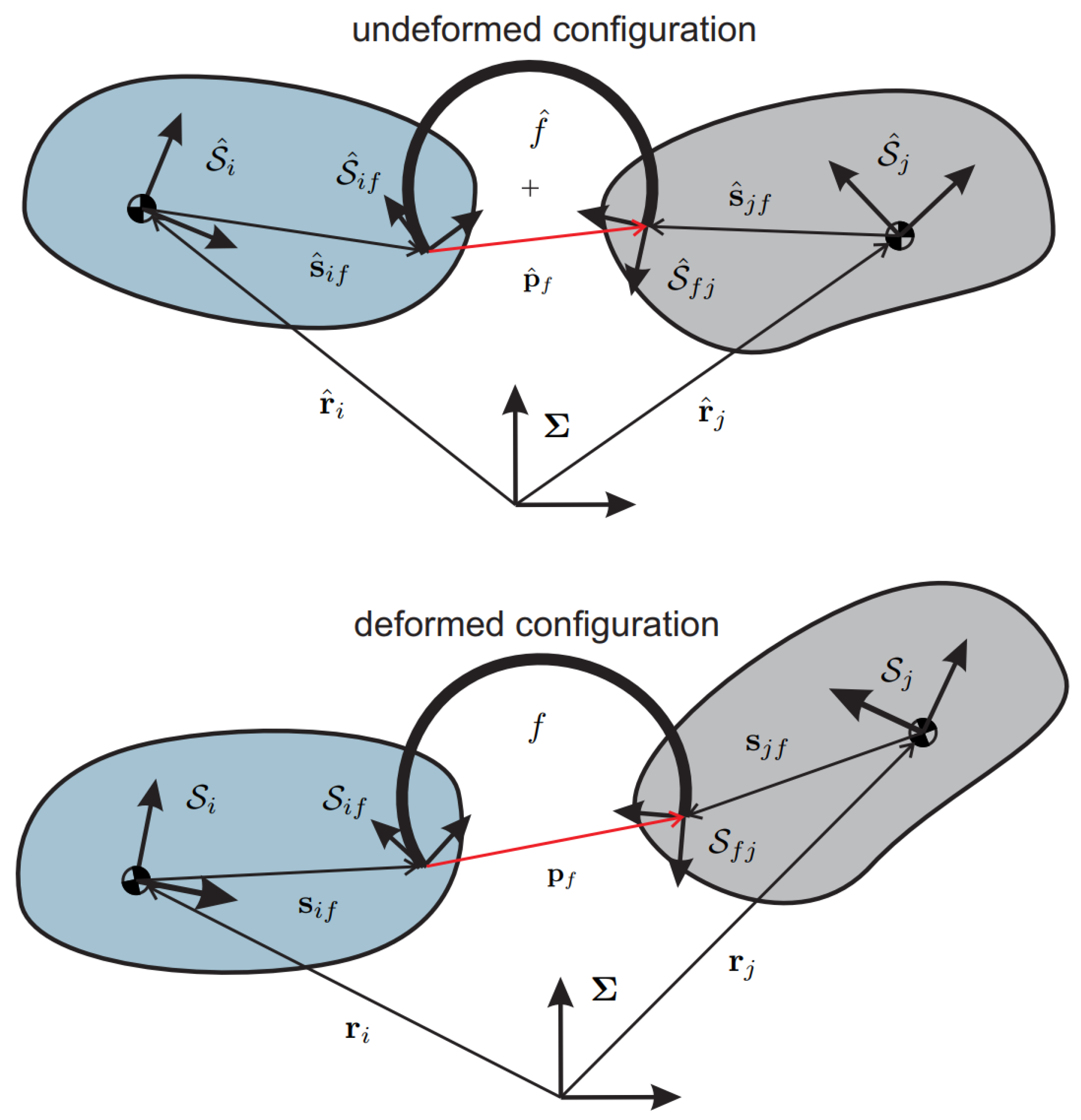
Hereafter, all vectors denoted with the hat will refer to the undeformed configuration, while the same vectors will indicate the deformed configuration without the hat. Position vectors of local frames as well as rotation matrices of frames describing the orientation of bodies in the undeformed configuration are constant.
A curved beam links two components, as it happens for the two bodies displayed in
Figure 2. First, consider the undeformed system composed of two rigid bodies, identified by the reference frames
and
, and by the flexure
. The vectors
and
denote the positions of the body reference frame origins with respect to the fixed reference frame
. In contrast, the vectors
and
, respectively, indicate the distance vectors going from the body-reference frame origins to the attachment points of the curved beam to the bodies.
In the undeformed configuration, the position vector
going from the attachment point on body
i to that on body
j is obtained through the following expression
Then, consider a generic configuration in which the bodies undergo finite displacements and rotations, and the flexure is deformed. For the assumption of rigid bodies, it follows that
and
where the superscript denotes the reference frame in which the vector is expressed. In the previous expressions,
and
have been introduced to simplify the notation. Then, the following closure equation stands,
where
and
are the rotation matrices mapping
and
into
and
is the distance vector between the two flexure extremities in the deformed configuration.
Let us introduce the deformation vector
containing the deformations of the flexure due to the displaced configuration described in
Section 2. As known from the continuum mechanics, this vector can be represented using either the material or the spatial description of motion. In the following, only the material description is implemented. Therefore, expressing
in the frame
of
Figure 2, it follows
where
has been pulled back to the undeformed configuration as required in the material description of motion.
Then, as recalled in
Section 2, the circular flexure model requires
to be expressed in the frame
instead of
, therefore
where
is the constant rotation matrix mapping
into
. The rotation angle
due to the flexure deformation reads
where
and
, respectively, are the rotation angles of the bodies in the spatial and material configurations and
,
denote the corresponding relative rotation angles. The generalized displacement array of the curved beam
f, already introduced in
Section 2, becomes
3.1. Jacobian of the Deformation Vector
Since the direct kinetostatic analysis will be solved using an iterative procedure, the variation of the generalized displacement array must be calculated. Using Equation (
5), the variation
is
where
while
,
are the variations of the body coordinates in the deformed configuration. The variation
is evaluated in the reference frame
but can be easily expressed in
remembering that
and
in Equation (
6) are constant, i.e.,
Considering the angles, the variation of Equation (
7), leads to
Finally, the variations can be combined to form the variation of the generalized deformation vector
. The latter satisfies the following expression
where
is a 6-dimensional vector containing the variations of the body coordinates of bodies
i and
j and
is the (
) Jacobian matrix, defined as
In deriving
, the property
has been employed, being
a particular skew-symmetric matrix used to define the cross-product in the planar case.
3.2. Kinetostatic Equations
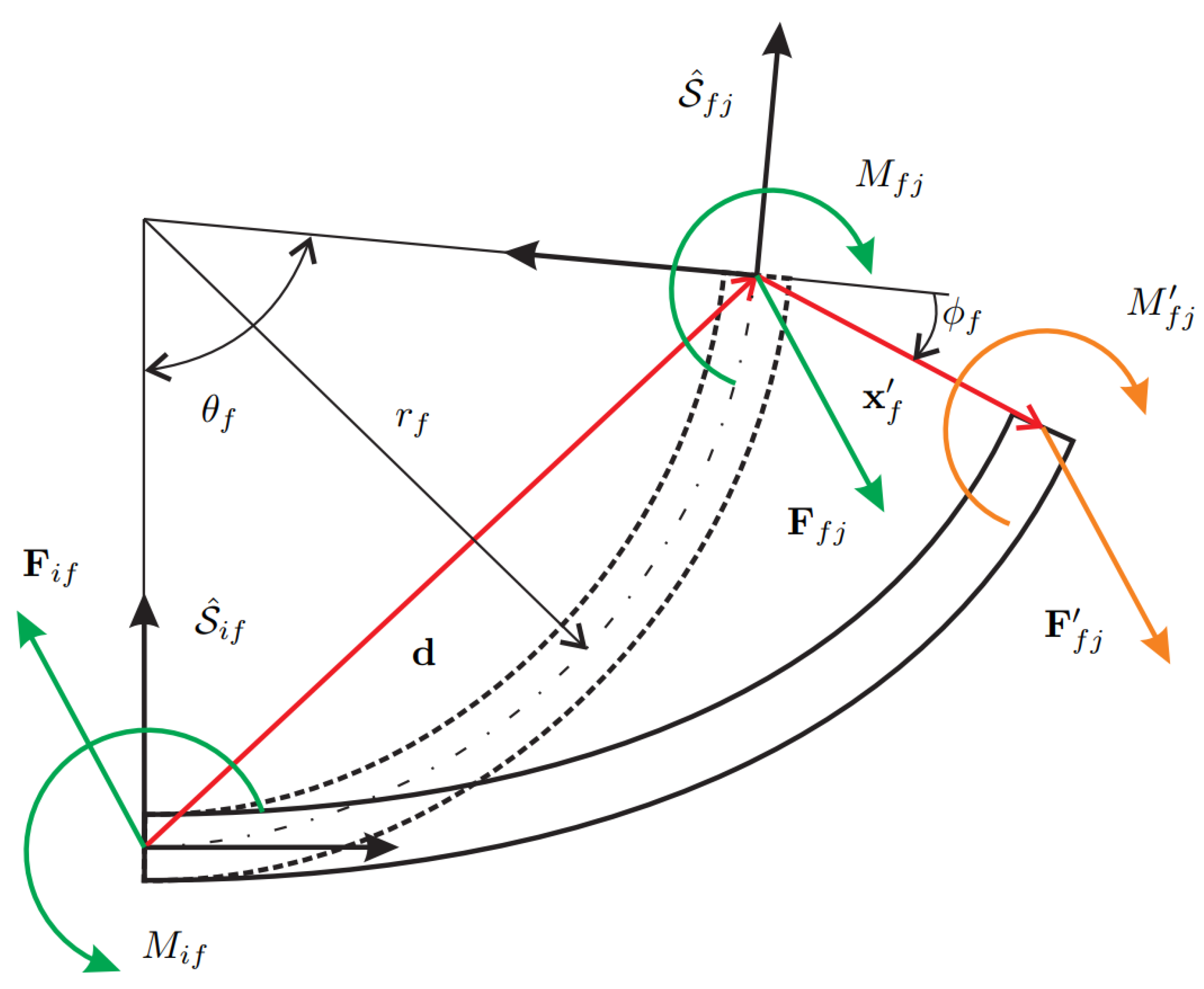
The kinetostatic equations of the system require the static equilibrium of a curved beam. Consider the layout of
Figure 3 showing the static balance of a curved beam connecting the bodies
i and
j. The deformation of the beam yields force and moment applied on the section
that must be equilibrated at section
. A first simplified model, hereafter referred to as the
linear model, performs the balance in the undeformed configuration and leads to the following expressions
where
is the rotation matrix mapping
to
and
is the distance vector between the two sections, respectively, defined as
In
Section 2, the stiffness matrix of the curved beam has been derived considering the undeformed configuration, meaning that the stiffness model is linear and cannot capture the geometrical non-linearity coming from the change of configuration during the beam deformation. Despite this, the balance in the deformed configuration can be modified including the tip displacement due to deformation. Referring to
Figure 3, the tip displacement can be included in deriving the moment
at the first section
, therefore modifying the previous Equation (
15) into
where
and
are referred to the deformed configuration. It is noteworthy that this
partial non-linear model is not the geometrically exact fully non-linear model of the curved beam since the forces and moment at section
are still obtained using a linear stiffness model for the curved beam.
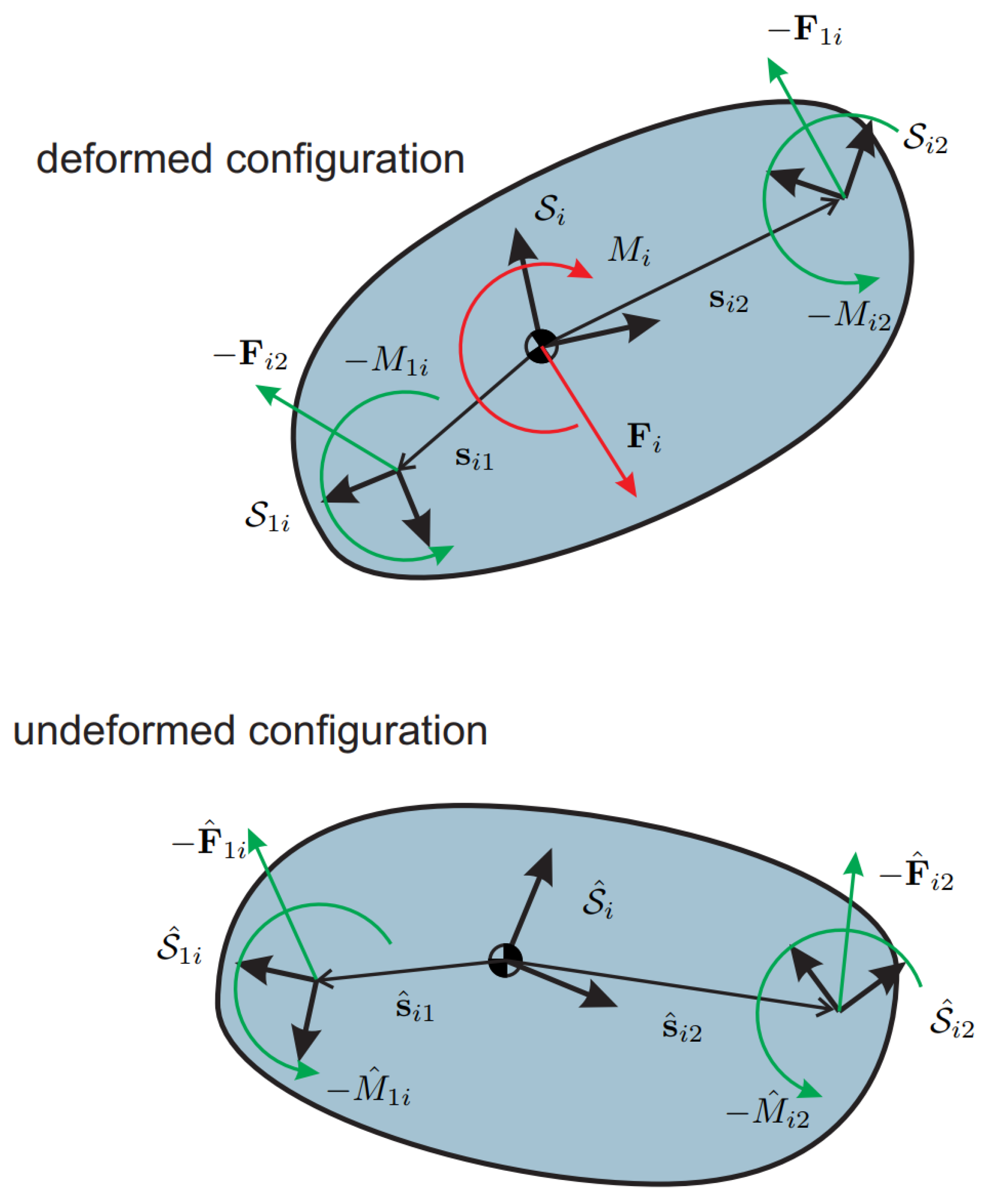
In the following, either the linear or the partial non-linear model will be included to derive the kinetostatic equations of a planar mechanism. Let us consider the body
i in its deformed configuration, as displayed in
Figure 4. The flexures have been removed and replaced with their reaction forces and torques where the minus signs come from Newton’s third law. The static balance of body
i requires that the following system be satisfied
where
and
are the external force and torque applied to body
i, respectively. From the balance Equations (
15) and (
17), the forces and moments coming from the flexures have been expressed in the undeformed configuration and are now turned into the deformed one. From
Figure 4, it can be found that
and
, hence it follows that
Considering the frame invariance of the scalar equation of moments, the final system reads
or in matrix form
Then, denoting with
and with
the residual vector of body
i, the final kinetostatic model is
where
is the generalized force vector or wrench acting on body
i,
and
are the stiffness matrices of the curved beams connected to the body, and
is the matrix defined in Equation (
17). If the latter is replaced by the matrix
of the linear model in Equation (
15), the kinetostatic model turns into
The kinetostatic equations of a complex multibody system are derived by assembling the residual vectors of all rigid bodies. The final system can be cast in the form
where
indicates the global residual vector,
is the global wrench of external forces and torques, and
is the global vector of generalized coordinates. The elastostatics model offers two types of analyses: the inverse and the direct kinetostatic analysis. The deformed configuration is the input, and the global wrench is the output in the inverse analysis, as has been already described in [
36]. The solution of the inverse kinetostatic analysis is straightforward and does not require an iterative procedure. In the direct kinetostatic analysis, the forces and moments applied to the system are known, while the final configuration of the deformed mechanism is sought. This highly non-linear problem can be solved using an iterative procedure such as the Newton–Raphson method described in Algorithm 1.
| Algorithm 1 Newton–Raphson iterative method |
- 1:
given threshold to terminate iterations - 2:
iteration number - 3:
set the solution guess value - 4:
procedureNewton–Raphson iterative method(,,) - 5:
calculate the residuals as in Equation ( 24) - 6:
calculate the tangent stiffness matrix as in Equation ( 26) - 7:
update the solution - 8:
if then - 9:
DKP solution - 10:
exit procedure - 11:
else - 12:
- 13:
goto step 4 - 14:
end if - 15:
end procedure
|
3.3. Tangent Stiffness Matrix Determination
Suppose that the external forces and moments are fixed in space. Then, considering the residual of the partial non-linear model of Equation (
23), the tangent stiffness matrix is
where
If the residual of the linear model of Equation (
24) is used instead, the tangent stiffness matrix turns into
The
Appendix A reports the expressions for the terms of
.
4. Case Study: The Four-Bar Linkage
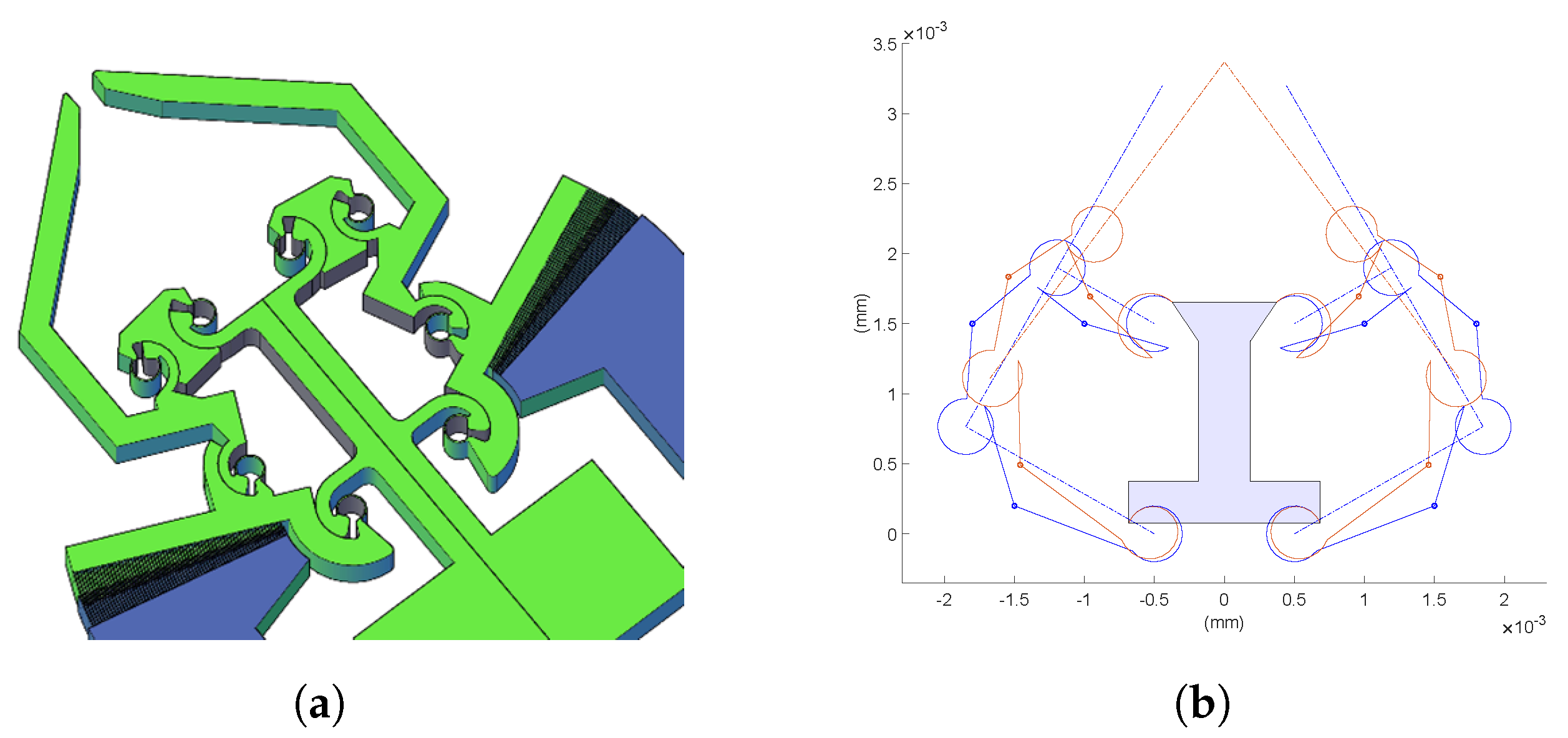
In this section, a compliant gripper with curved beams, shown in
Figure 5a, is studied. The monolithic structure of the mechanism can be reduced to two in-parallel four-bar linkages, as revealed in
Figure 5b. For symmetry along the vertical axis, only half a mechanism will be analyzed, i.e., the right side of
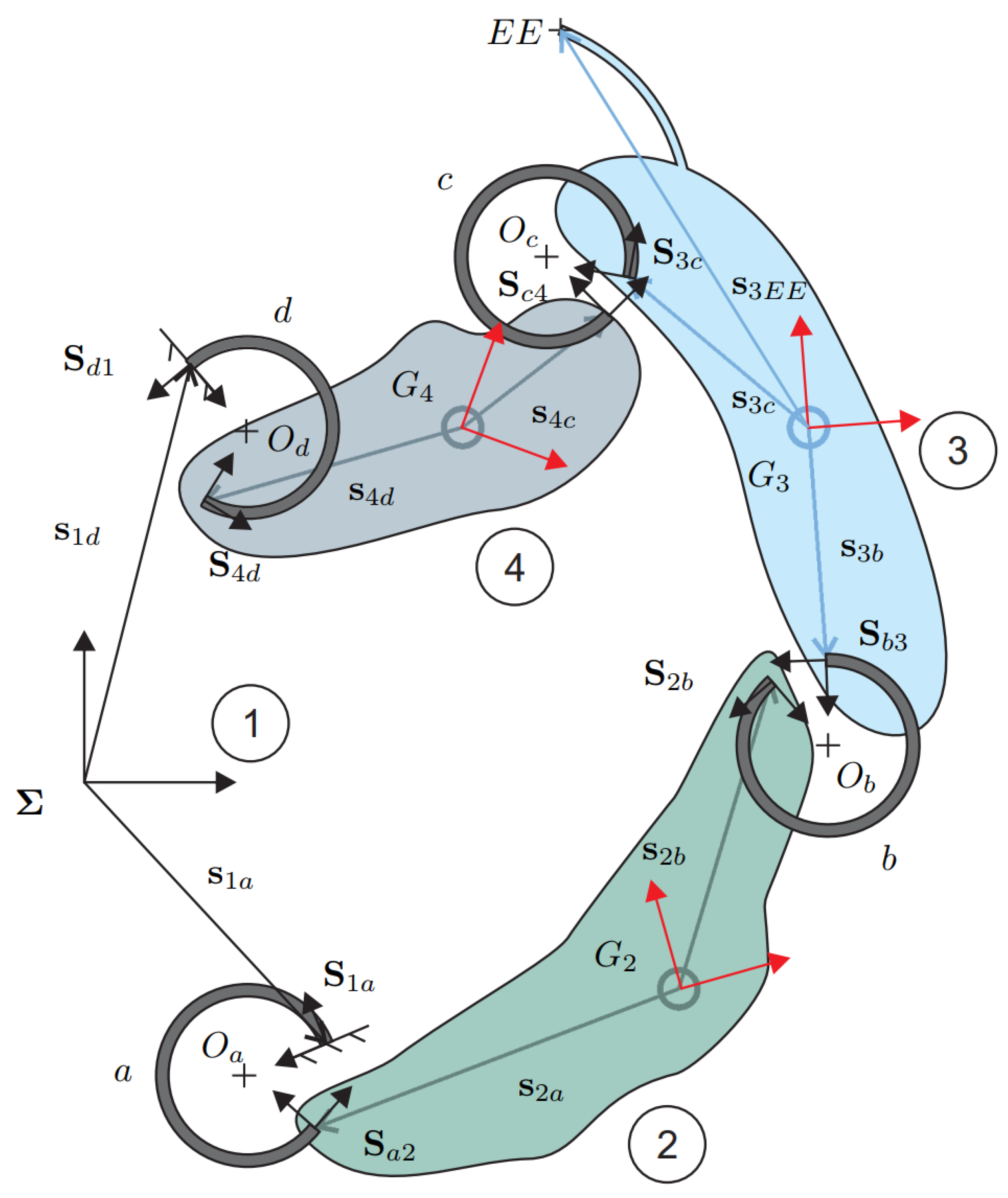
Figure 5b. The layout of
Figure 6 has been plotted following the notation presented in
Section 3. Body 1 is the frame, here considered fixed, while bodies 2, 3, and 4 are moving rigid bodies. Considering grippers with CSFH joints, one link is a part of the monolithic structure enclosed between two circular beams. In an MEMS device, the entire monolithic structure can deform. However, the assumption of rigid links coupled to flexible circular beams has been verified using FE models. It is fully justified since the links are at least one order of magnitude stiffer than the circular beam flexures.
First, vectors
can be calculated knowing the undeformed configuration, i.e.,
, therefore
Similarly, the vectors
of the flexures in the deformed configuration, i.e.,
, are
Since body 1 is the frame,
and
. Furthermore, if the frame
of body 1 is coincident with
, it follows that
and
. Here, these matrices are written for the sake of completeness.
Notice that
could be one of the iterative solutions
employed in the Newton–Raphson algorithm. The deformation vectors
in the material description and expressed in the local frames of the undeformed flexures are
The angular deformation
is obtained as
The expressions (31) and (32) allows for determining the flexure generalized deformations
,
,
, and
.
The transformation matrices
of Equation (
17) are defined as
where
and
can be found for each curved beam using Equation (
16). Expressions similar to
, not reported for brevity, can be written to determine
of Equation (
15).
Then, the matrices
of Equation (
22) are
Setting the external wrenches
applied at the mass centers
of the rigid bodies, the four residual vectors
,
, are
The residuals are employed to form a system of 12 non-linear kinetostatic equations, i.e.,
that must be solved using an iterative procedure. To calculate the tangent stiffness matrix necessary to apply the Newton–Raphson algorithm, let us define the Jacobians
, i.e.,
where
The Jacobians
can be mapped using Boolean matrices to the final dimension of the system, i.e.,
Then, following the expression (
A2) of
reported in the Appendix, it yields
The final expression for the first part of the tangent stiffness matrix is
The expressions for
can be obtained starting from
in Equation (
A7), i.e.,
where the matrices
of Equation (
A4) are defined as
Therefore,
becomes
Finally, the third part of the tangent stiffness matrix
is derived through the 6-dimensional vectors
of Equation (
A11), i.e.,
where
is obtained taking the force vector from the flexure wrench
. The block-matrices
, or
, are derived taking only the first two rows, i.e., the block of
, from the corresponding Jacobian matrices. Using the equations of (
A12), the matrices
can be obtained and therefore, the matrix
becomes
The final expression for the tangent stiffness matrix is
. If the DOFs of the first body, i.e., the fixed frame, are removed by imposing fixed boundary conditions, the final form of
will be a (
) matrix with the following pattern

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}