
Stop-Flow Lithography for the Continuous Production of Degradable Hydrogel Achiral Crescent Microswimmers

 , , ,
, , , 
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Materials and Methods
2.1. Preparation of Magnetic Hydrogel Nanocomposite
2.2. Fabrication of Microfluidic Chips
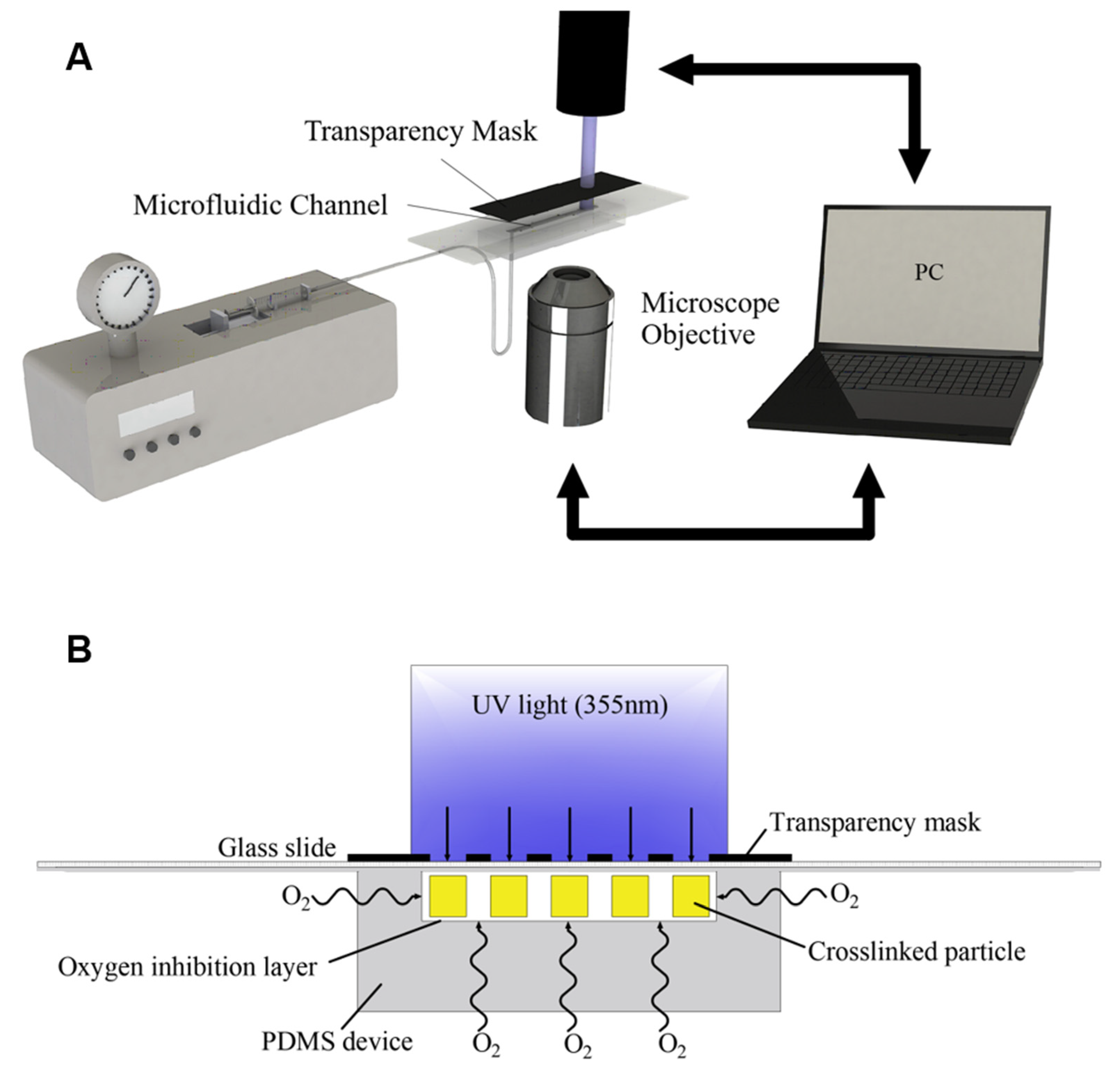
2.3. Stop-Flow-Lithography Setup
2.4. Fabrication of Hydrogel Crescent Microswimmers
2.5. Structural Characterization
2.6. Degradation Test
2.7. Cell Culture
2.8. Cell Viability
2.9. Motion Control Tests
3. Results
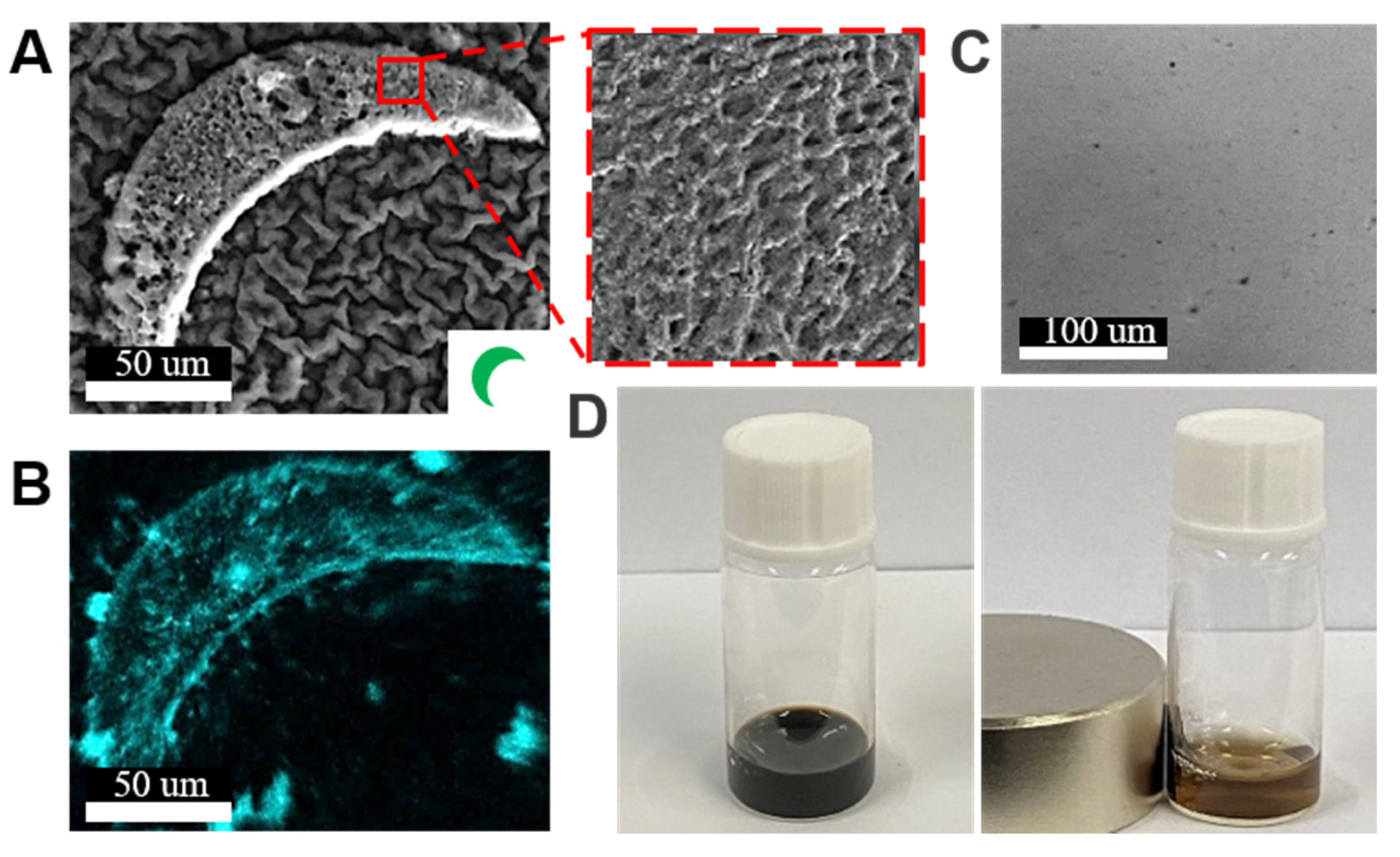
3.1. Characterization of Hydrogel Crescent Microswimmers
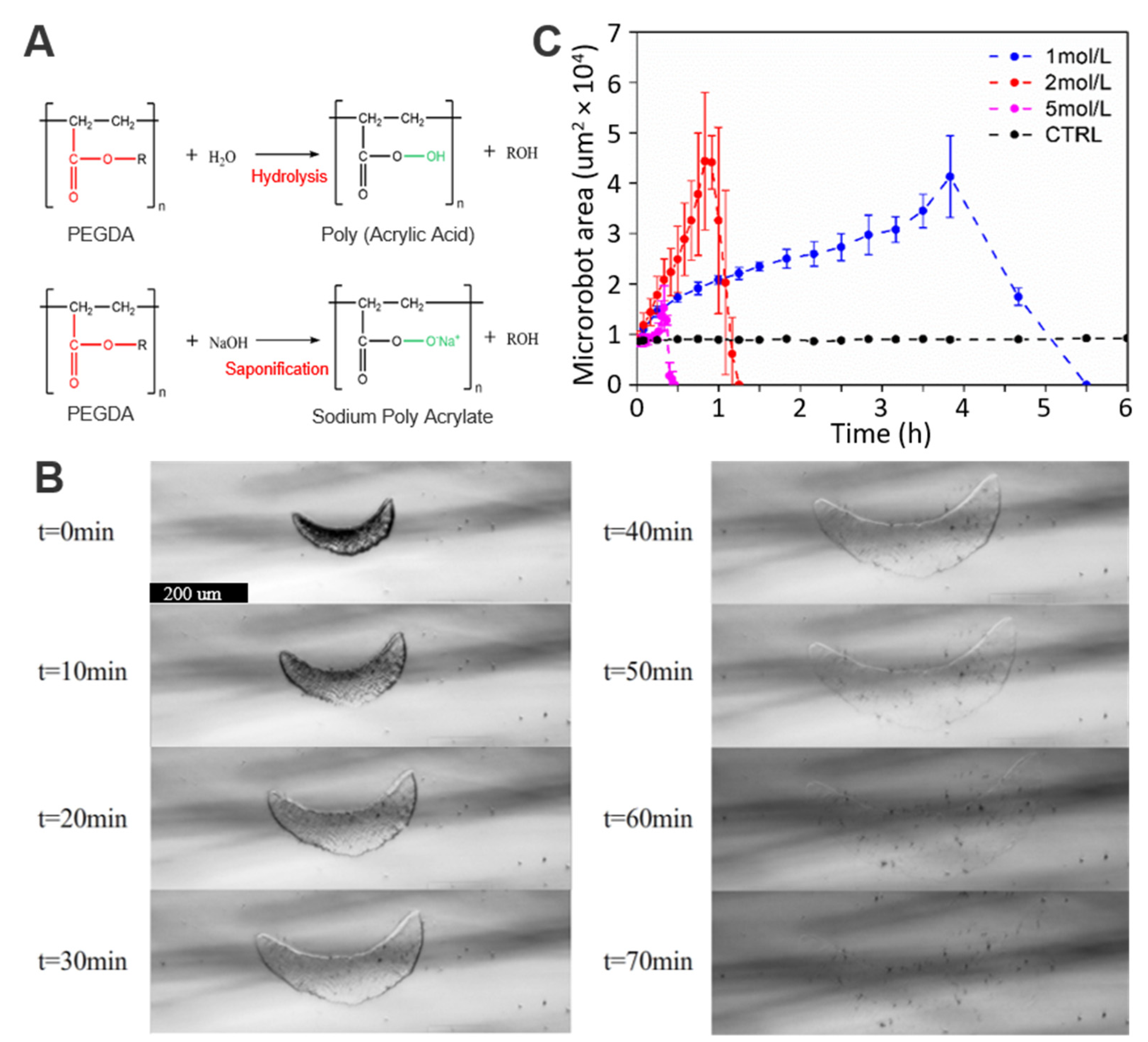
3.2. Degradability of the Hydrogel Crescent Microswimmers
3.3. Biocompatibility of the Hydrogel Crescent Microswimmers
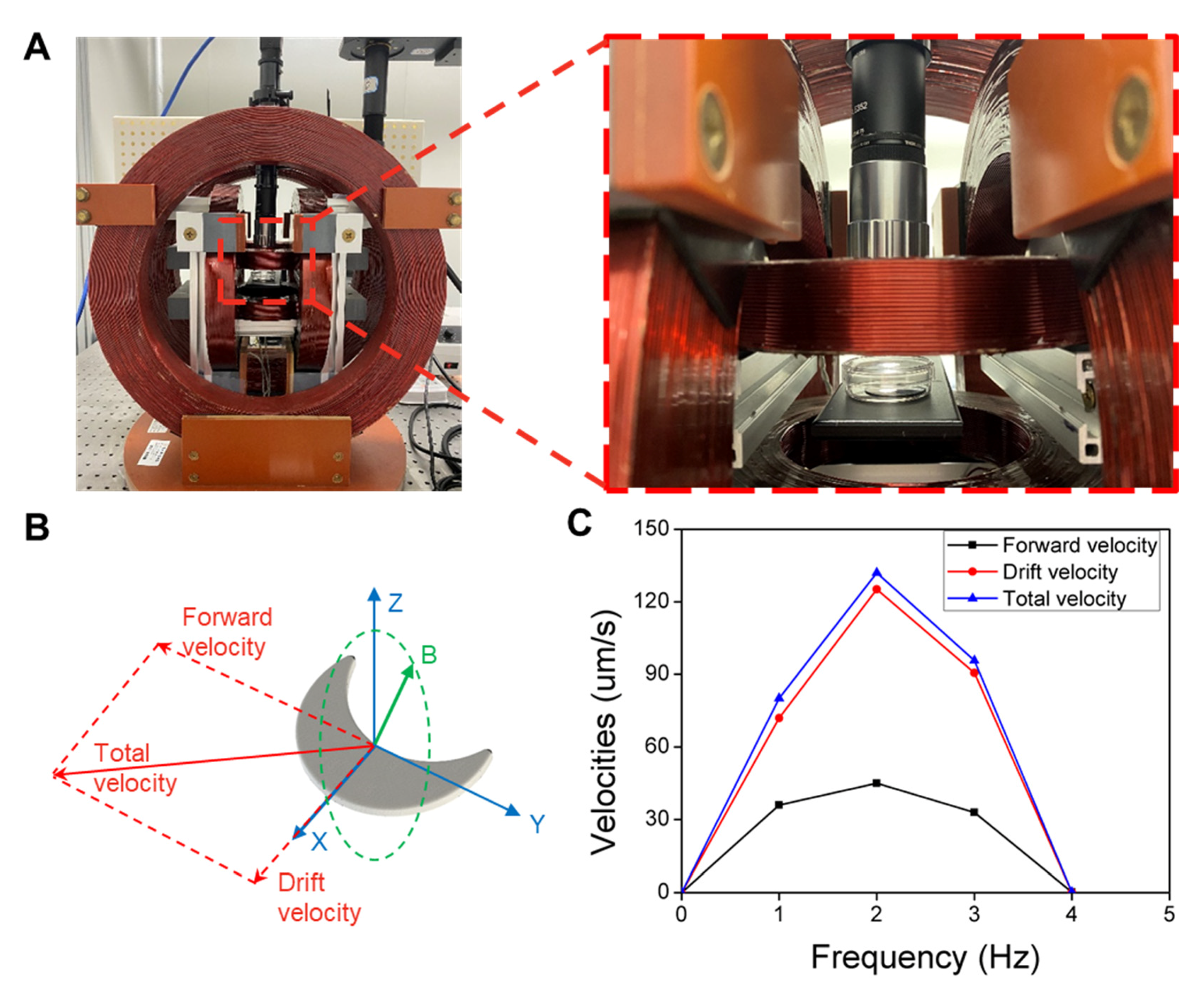
3.4. Magnetic Actuation of the Hydrogel Microswimmers
4. Conclusions
Supplementary Materials
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Nelson, B.J.; Kaliakatsos, I.K.; Abbott, J.J. Microrobots for Minimally Invasive Medicine. Annu. Rev. Biomed. Eng. 2010, 12, 55–85. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Kagan, D.; Laocharoensuk, R.; Zimmerman, M.; Clawson, C.; Balasubramanian, S.; Kong, D.; Bishop, D.; Sattayasamitsathit, S.; Zhang, L.F.; Wang, J. Rapid Delivery of Drug Carriers Propelled and Navigated by Catalytic Nanoshuttles. Small 2010, 6, 2741–2747. [Google Scholar] [CrossRef] [PubMed]
- Mhanna, R.; Qiu, F.M.; Zhang, L.; Ding, Y.; Sugihara, K.; Zenobi-Wong, M.; Nelson, B.J. Artificial Bacterial Flagella for Remote-Controlled Targeted Single-Cell Drug Delivery. Small 2014, 10, 1953–1957. [Google Scholar] [CrossRef] [PubMed]
- Chen, C.R.; Mou, F.Z.; Xu, L.L.; Wang, S.F.; Guan, J.G.; Feng, Z.P.; Wang, Q.W.; Kong, L.; Li, W.; Wang, J.; et al. Light-Steered Isotropic Semiconductor Micromotors. Adv. Mater. 2017, 29, 1603374. [Google Scholar] [CrossRef] [PubMed]
- Kim, H.; Cheang, U.K.; Kim, M.J. Autonomous dynamic obstacle avoidance for bacteria-powered microrobots (BPMs) with modified vector field histogram. PLoS ONE 2017, 12, e0185744. [Google Scholar] [CrossRef] [Green Version]
- Ceylan, H.; Yasa, I.C.; Yasa, O.; Tabak, A.F.; Giltinan, J.; Sitti, M. 3D-Printed Biodegradable Microswimmer for Theranostic Cargo Delivery and Release. ACS Nano 2019, 13, 3353–3362. [Google Scholar] [CrossRef] [Green Version]
- Park, J.; Jin, C.; Lee, S.; Kim, J.Y.; Choi, H. Magnetically Actuated Degradable Microrobots for Actively Controlled Drug Release and Hyperthermia Therapy. Adv. Healthc. Mater. 2019, 8, 1900213. [Google Scholar] [CrossRef]
- Magdanz, V.; Guix, M.; Hebenstreit, F.; Schmidt, O.G. Dynamic Polymeric Microtubes for the Remote-Controlled Capture, Guidance, and Release of Sperm Cells. Adv. Mater. 2016, 28, 4084–4089. [Google Scholar] [CrossRef]
- Song, X.; Chen, Z.; Zhang, X.; Xiong, J.; Jiang, T.; Wang, Z.; Geng, X.; Cheang, U.K. Magnetic tri-bead microrobot assisted near-infrared triggered combined photothermal and chemotherapy of cancer cells. Sci. Rep. 2021, 11, 7907. [Google Scholar] [CrossRef]
- Park, J.; Kim, J.Y.; Pane, S.; Nelson, B.J.; Choi, H. Acoustically Mediated Controlled Drug Release and Targeted Therapy with Degradable 3D Porous Magnetic Microrobots. Adv. Healthc. Mater. 2021, 10, 2001096. [Google Scholar] [CrossRef] [PubMed]
- Sun, H.C.M.; Liao, P.; Wei, T.Y.; Zhang, L.; Sun, D. Magnetically Powered Biodegradable Microswimmers. Micromachines 2020, 11, 404. [Google Scholar] [CrossRef] [PubMed]
- Lee, H.; Kim, D.I.; Kwon, S.H.; Park, S. Magnetically Actuated Drug Delivery Helical Microrobot with Magnetic Nanoparticle Retrieval Ability. Acs Appl. Mater. Interfaces 2021, 13, 19633–19647. [Google Scholar] [CrossRef] [PubMed]
- Ding, A.X.; Jeon, O.; Cleveland, D.; Gasvoda, K.L.; Wells, D.; Lee, S.J.; Alsberg, E. Jammed Micro-Flake Hydrogel for Four-Dimensional Living Cell Bioprinting. Adv. Mater. 2022, 34, 2109394. [Google Scholar] [CrossRef] [PubMed]
- Ding, A.X.; Lee, S.J.; Ayyagari, S.; Tang, R.; Huynh, C.T.; Alsberg, E. 4D biofabrication via instantly generated graded hydrogel scaffolds. Bioact. Mater. 2022, 7, 324–332. [Google Scholar] [CrossRef]
- Zieliński, P.S.; Gudeti, P.K.R.; Rikmanspoel, T.; Włodarczyk-Biegun, M.K. 3D printing of bio-instructive materials: Toward directing the cell. Bioact. Mater. 2023, 19, 292–327. [Google Scholar] [CrossRef]
- Peters, C.; Hoop, M.; Pane, S.; Nelson, B.J.; Hierold, C. Degradable Magnetic Composites for Minimally Invasive Interventions: Device Fabrication, Targeted Drug Delivery, and Cytotoxicity Tests. Adv. Mater. 2016, 28, 533–538. [Google Scholar] [CrossRef] [Green Version]
- Wang, X.; Qin, X.-H.; Hu, C.; Terzopoulou, A.; Chen, X.-Z.; Huang, T.-Y.; Maniura-Weber, K.; Pané, S.; Nelson, B.J. 3D Printed Enzymatically Biodegradable Soft Helical Microswimmers. Adv. Funct. Mater. 2018, 28, 1804107. [Google Scholar] [CrossRef]
- Appleyard, D.C.; Chapin, S.C.; Srinivas, R.L.; Doyle, P.S. Bar-coded hydrogel microparticles for protein detection: Synthesis, assay and scanning. Nat. Protoc. 2011, 6, 1761–1774. [Google Scholar] [CrossRef]
- Panda, P.; Ali, S.; Lo, E.; Chung, B.G.; Hatton, T.A.; Khademhosseini, A.; Doyle, P.S. Stop-flow lithography to generate cell-laden microgel particles. Lab Chip 2008, 8, 1056–1061. [Google Scholar] [CrossRef]
- Tian, Y.; Wang, L.Q. Complex three-dimensional microparticles from microfluidic lithography. Electrophoresis 2020, 41, 1491–1502. [Google Scholar] [CrossRef]
- Sharan, P.; Maslen, C.; Altunkeyik, B.; Rehor, I.; Simmchen, J.; Montenegro-Johnson, T.D. Fundamental Modes of Swimming Correspond to Fundamental Modes of Shape: Engineering I-, U-, and S-Shaped Swimmers. Adv. Intell. Syst. 2021, 3, 2100068. [Google Scholar] [CrossRef]
- Noren, B.E.; Shaha, R.K.; Stenquist, A.T.; Frick, C.P.; Oakey, J.S. Cell Printing in Complex Hydrogel Scaffolds. IEEE T Nanobiosci. 2019, 18, 265–268. [Google Scholar] [CrossRef] [PubMed]
- Nam, S.M.; Kim, K.; Kang, I.S.; Park, W.; Lee, W. Generation of 3D Microparticles in Microchannels with Non-rectangular Cross Sections. Biochip J. 2019, 13, 226–235. [Google Scholar] [CrossRef]
- Huang, S.H.; Lin, C.K. Stop-flow Lithography to Continuously Fabricate Microlens Structures Utilizing an Adjustable Three-Dimensional Mask. Micromachines 2014, 5, 667–680. [Google Scholar] [CrossRef] [Green Version]
- Tottori, S.; Nelson, B.J. Controlled Propulsion of Two-Dimensional Microswimmers in a Precessing Magnetic Field. Small 2018, 14, 1800722. [Google Scholar] [CrossRef] [PubMed]
- Zhu, J.M. Bioactive modification of poly(ethylene glycol) hydrogels for tissue engineering. Biomaterials 2010, 31, 4639–4656. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Wahajuddin, S.A. Superparamagnetic iron oxide nanoparticles: Magnetic nanoplatforms as drug carriers. Int. J. Nanomed. 2012, 7, 3445–3471. [Google Scholar] [CrossRef] [Green Version]
- Mu, X.L.; Wang, Z.H.; Zhong, Y.K.; Jiang, T.; Cheang, U.K. Development of 2D MOF-Based Microrobots under Annealing Treatment and Their Biomedical Application. Ind. Eng. Chem. Res. 2021, 60, 9465–9474. [Google Scholar] [CrossRef]
- Sachs, J.; Morozov, K.I.; Kenneth, O.; Qiu, T.; Segreto, N.; Fischer, P.; Leshansky, A.M. Role of symmetry in driven propulsion at low Reynolds number. Phys. Rev. E 2018, 98, 063105. [Google Scholar] [CrossRef] [Green Version]
- Cohen, K.J.; Rubinstein, B.Y.; Kenneth, O.; Leshansky, A.M. Unidirectional Propulsion of Planar Magnetic Nanomachines. Phys. Rev. Appl. 2019, 12, 014025. [Google Scholar] [CrossRef] [Green Version]
- Cheang, U.K.; Kim, H.; Milutinovic, D.; Choi, J.; Kim, M.J. Feedback Control of an Achiral Robotic Microswimmer. J. Bionic. Eng. 2017, 14, 245–259. [Google Scholar] [CrossRef]
- Peters, C.; Ergeneman, O.; Garcia, P.D.W.; Muller, M.; Pane, S.; Nelson, B.J.; Hierold, C. Superparamagnetic Twist-Type Actuators with Shape-Independent Magnetic Properties and Surface Functionalization for Advanced Biomedical Applications. Adv. Funct. Mater. 2014, 24, 5269–5276. [Google Scholar] [CrossRef]
- Gao, W.; Peng, X.M.; Pei, A.; Kane, C.R.; Tam, R.; Hennessy, C.; Wang, J. Bioinspired Helical Microswimmers Based on Vascular Plants. Nano Lett. 2014, 14, 305–310. [Google Scholar] [CrossRef] [PubMed] [Green Version]





Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xiong, J.; Song, X.; Cai, Y.; Liu, J.; Li, Y.; Ji, Y.; Guo, L.; Cheang, U.K. Stop-Flow Lithography for the Continuous Production of Degradable Hydrogel Achiral Crescent Microswimmers. Micromachines 2022, 13, 798. https://doi.org/10.3390/mi13050798
Xiong J, Song X, Cai Y, Liu J, Li Y, Ji Y, Guo L, Cheang UK. Stop-Flow Lithography for the Continuous Production of Degradable Hydrogel Achiral Crescent Microswimmers. Micromachines. 2022; 13(5):798. https://doi.org/10.3390/mi13050798
Chicago/Turabian StyleXiong, Junfeng, Xiaoxia Song, Yuhang Cai, Jiahe Liu, Yangyuan Li, Yaqiang Ji, Liang Guo, and U Kei Cheang. 2022. "Stop-Flow Lithography for the Continuous Production of Degradable Hydrogel Achiral Crescent Microswimmers" Micromachines 13, no. 5: 798. https://doi.org/10.3390/mi13050798
APA StyleXiong, J., Song, X., Cai, Y., Liu, J., Li, Y., Ji, Y., Guo, L., & Cheang, U. K. (2022). Stop-Flow Lithography for the Continuous Production of Degradable Hydrogel Achiral Crescent Microswimmers. Micromachines, 13(5), 798. https://doi.org/10.3390/mi13050798