
Study of the Influencing Factors on the Small-Quantity Fuel Injection of Piezoelectric Injector


Abstract
:1. Introduction
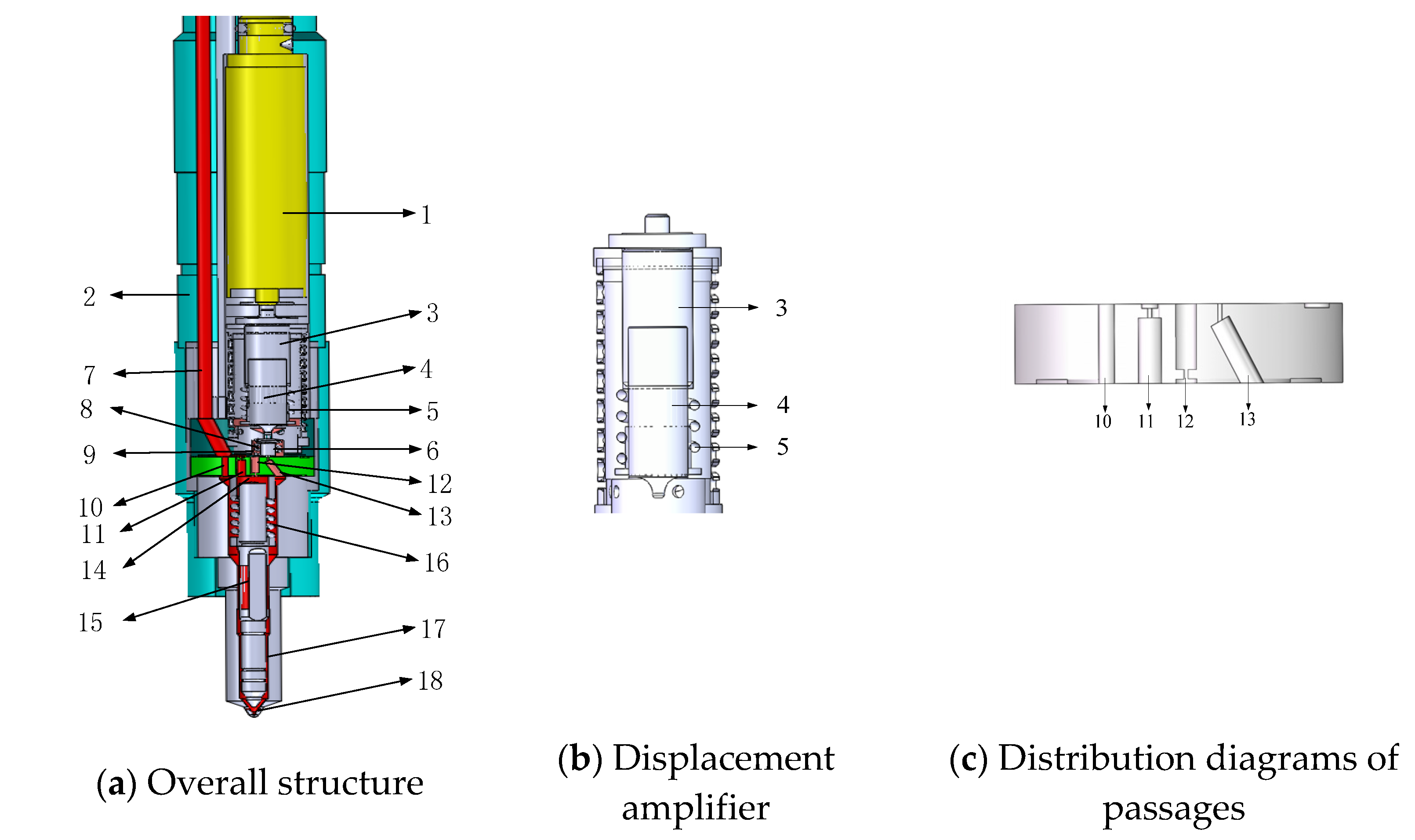
2. Piezoelectric Injector Working Principle
3. Piezoelectric Injector Model
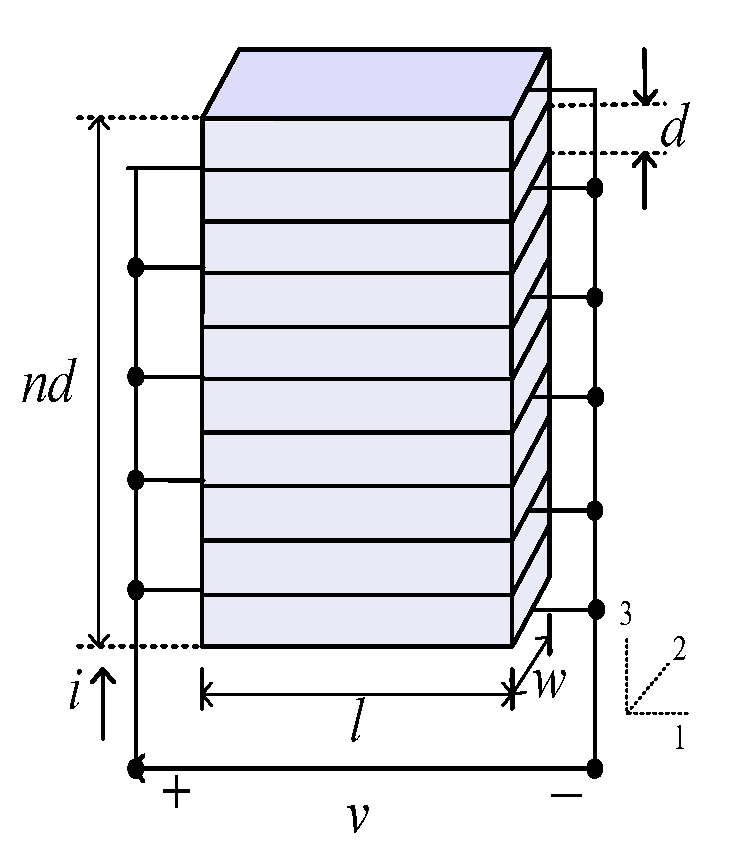
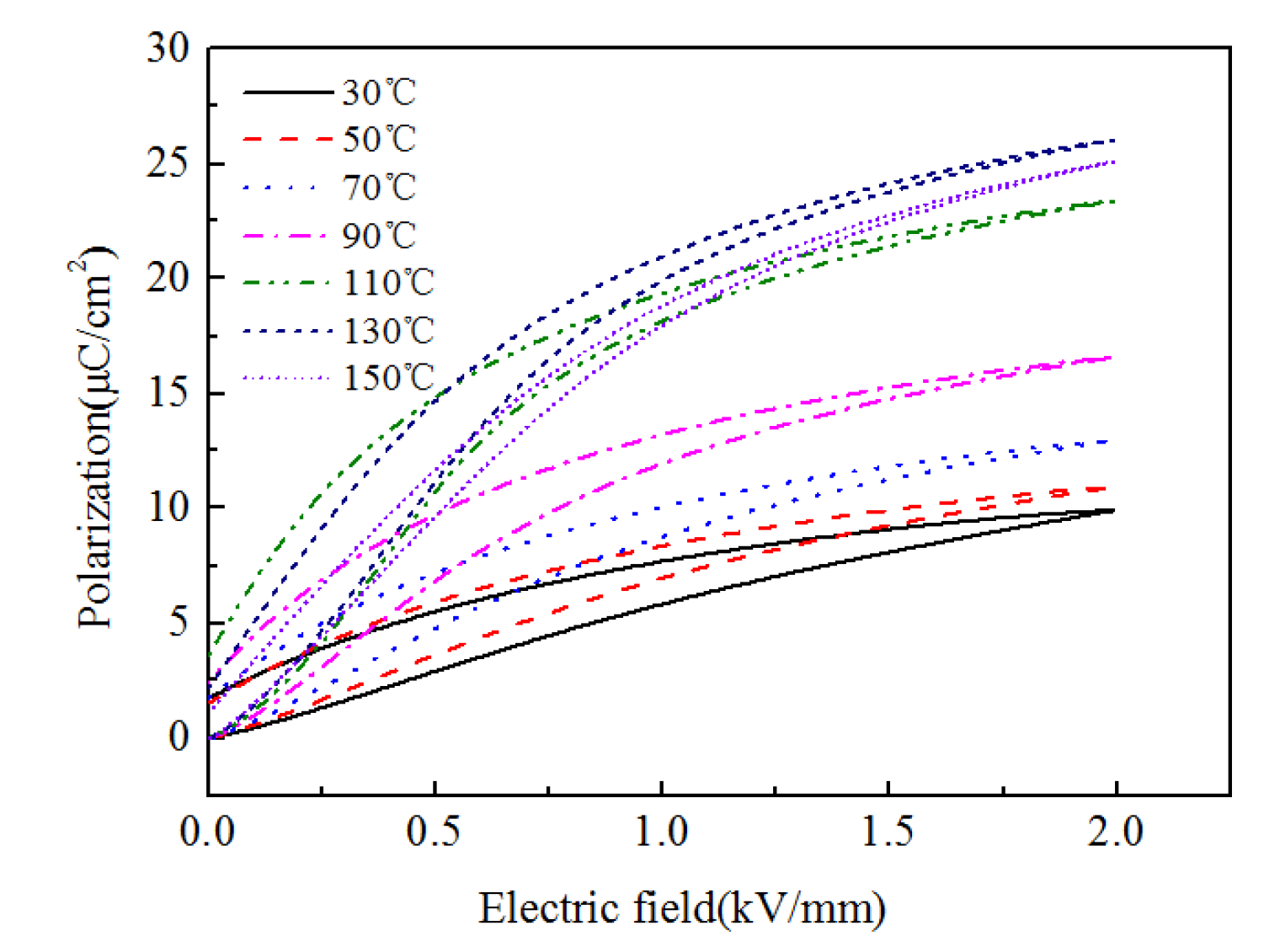
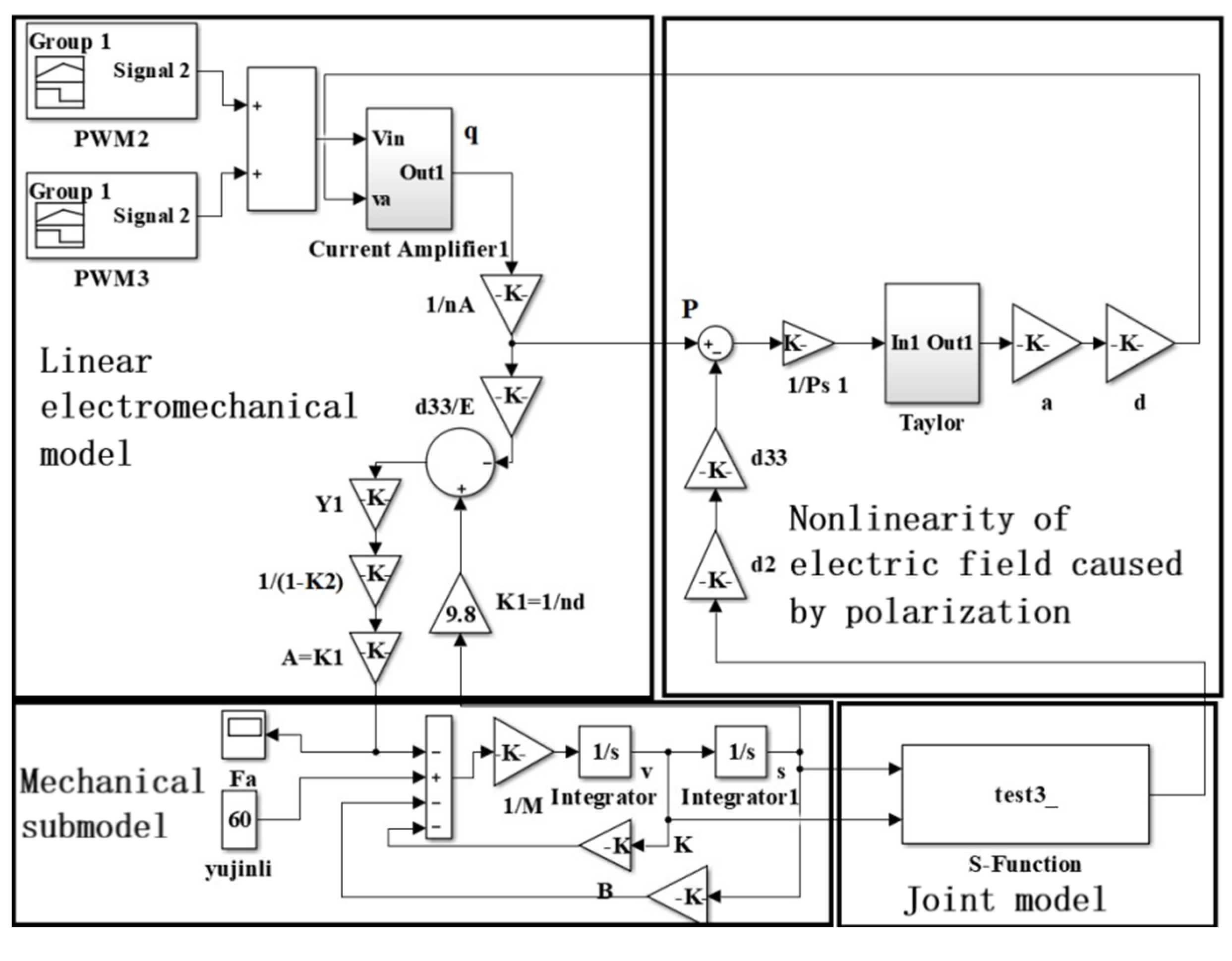
3.1. Mathematical Sub-Model of Piezoelectric Actuators
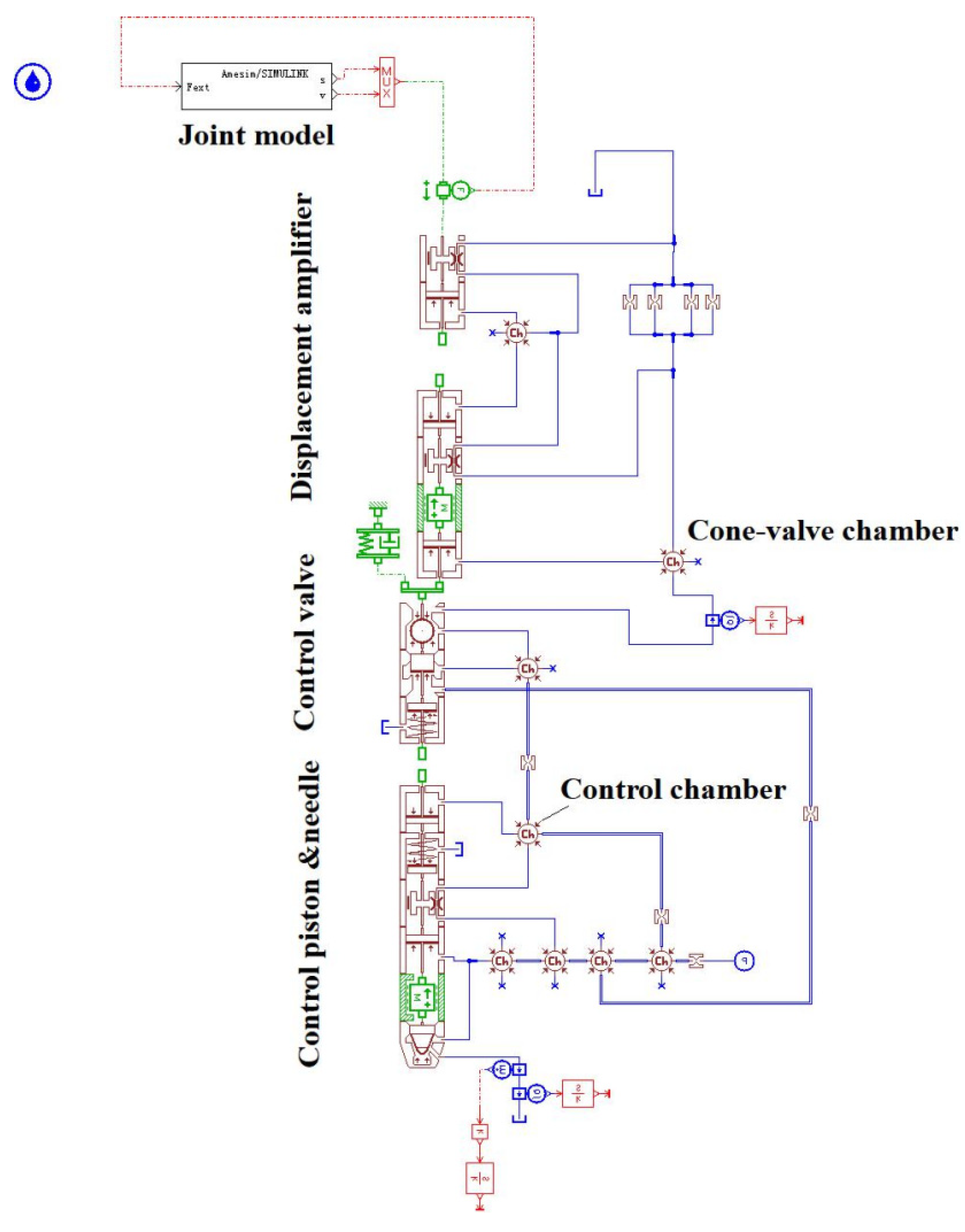
3.2. Models of Mechanical Hydraulic Components
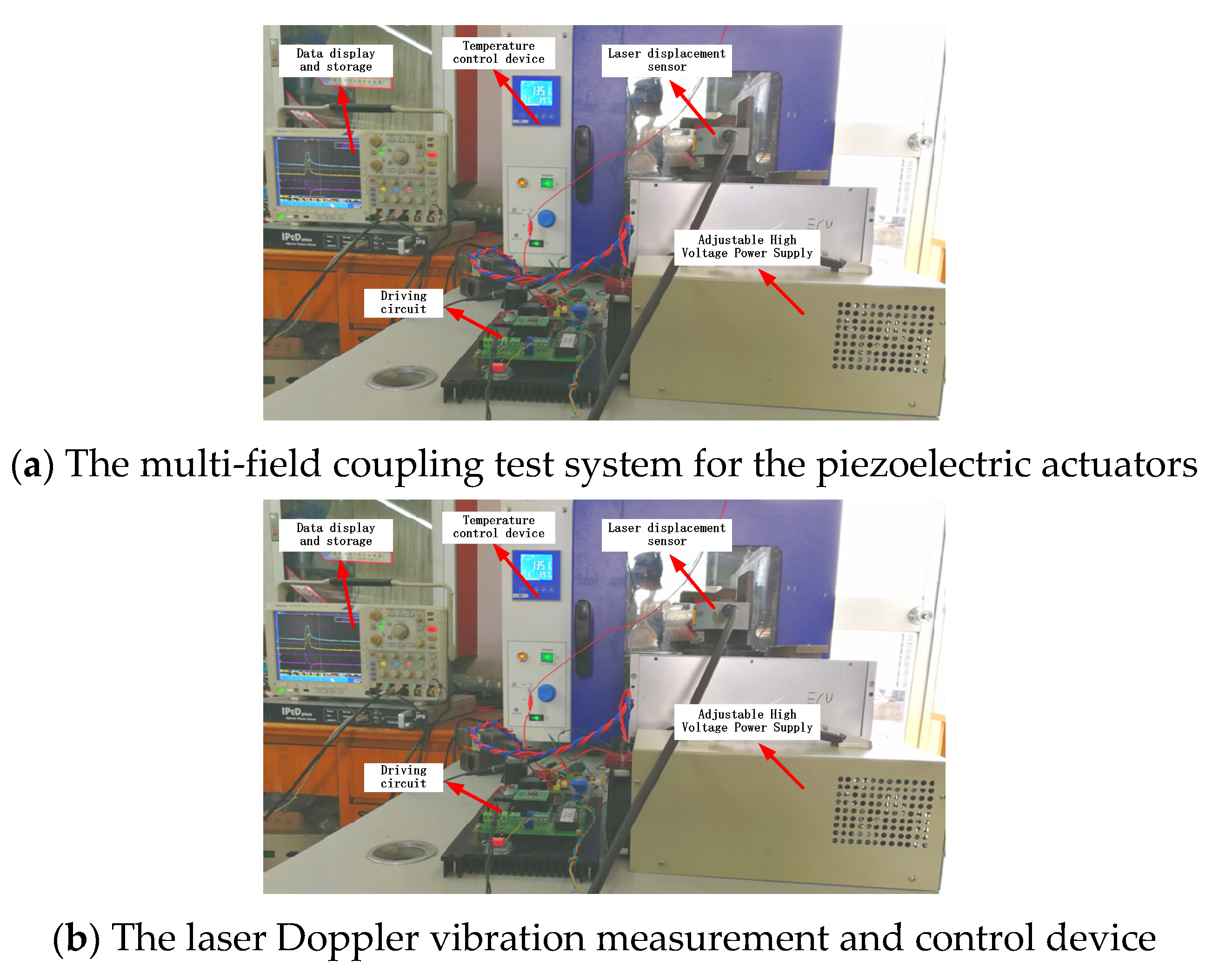
3.3. Model Validation
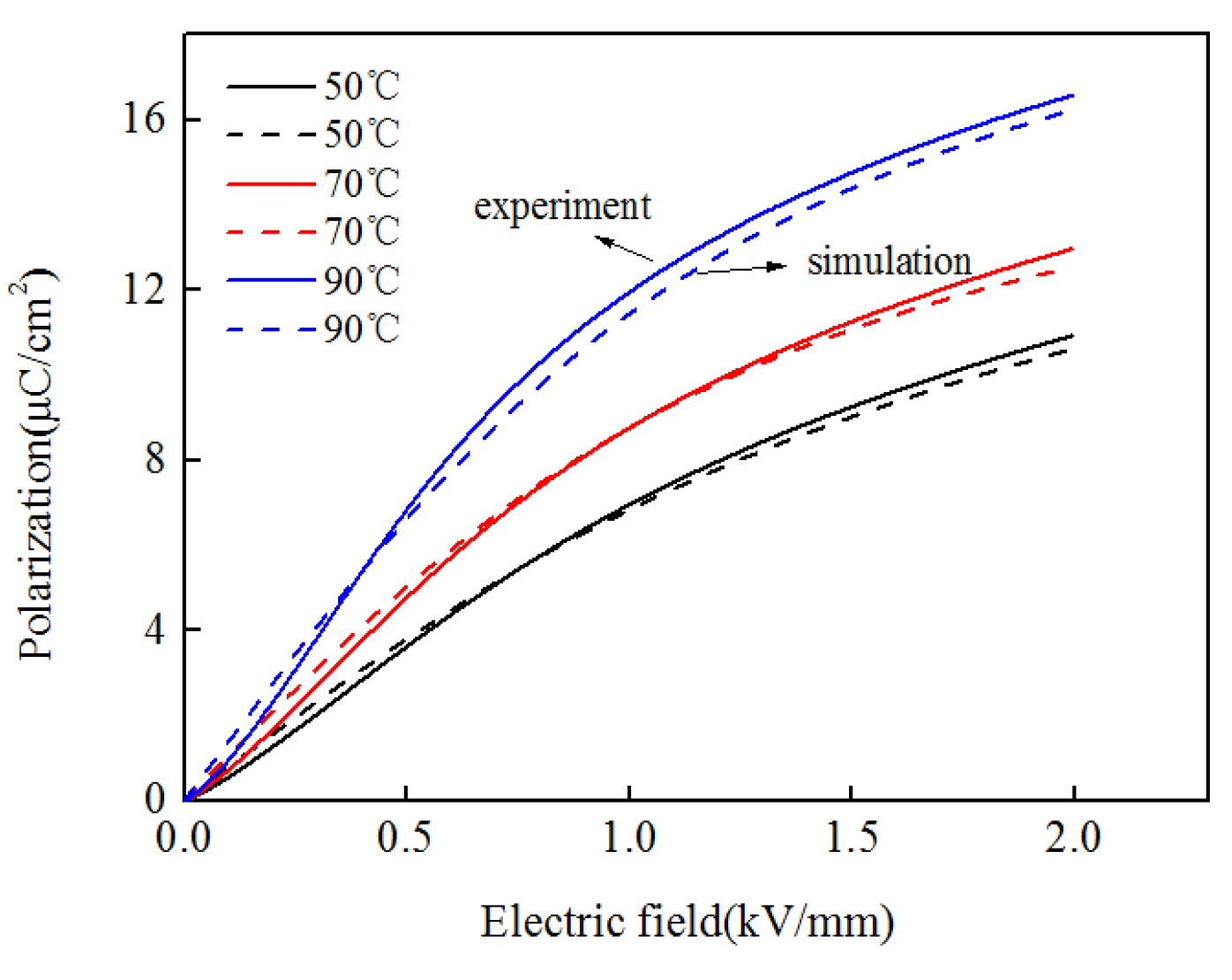
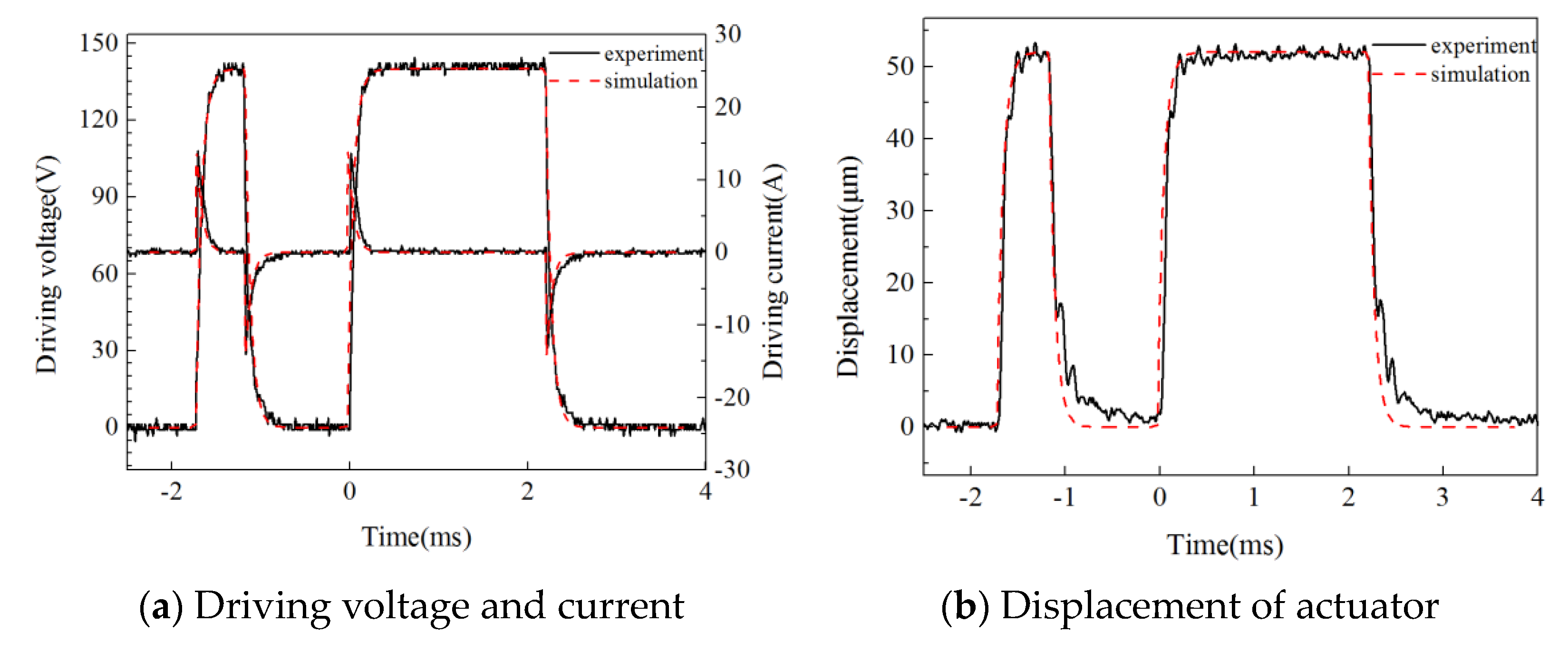
3.3.1. Model Validation of the Piezoelectric Actuator
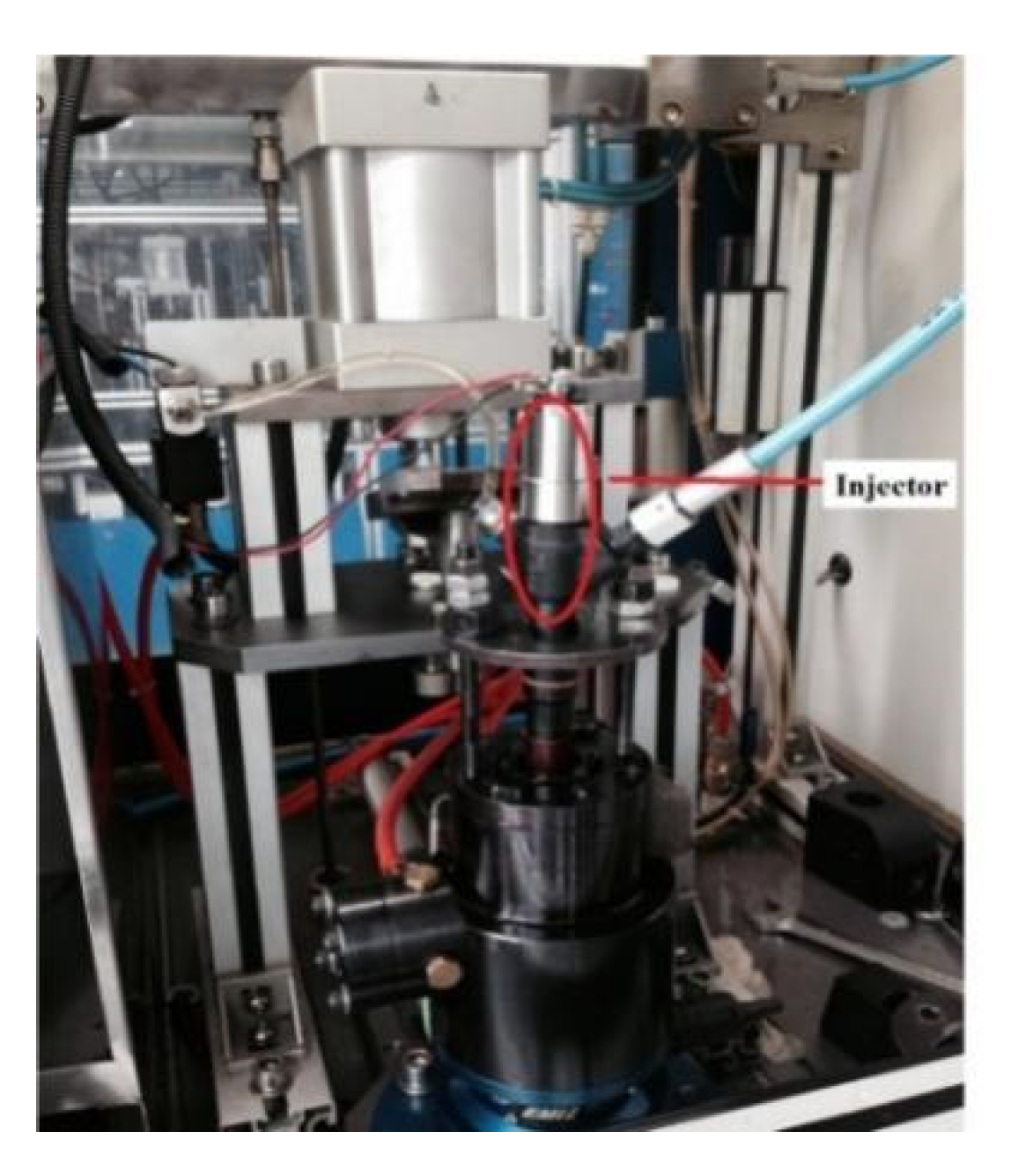
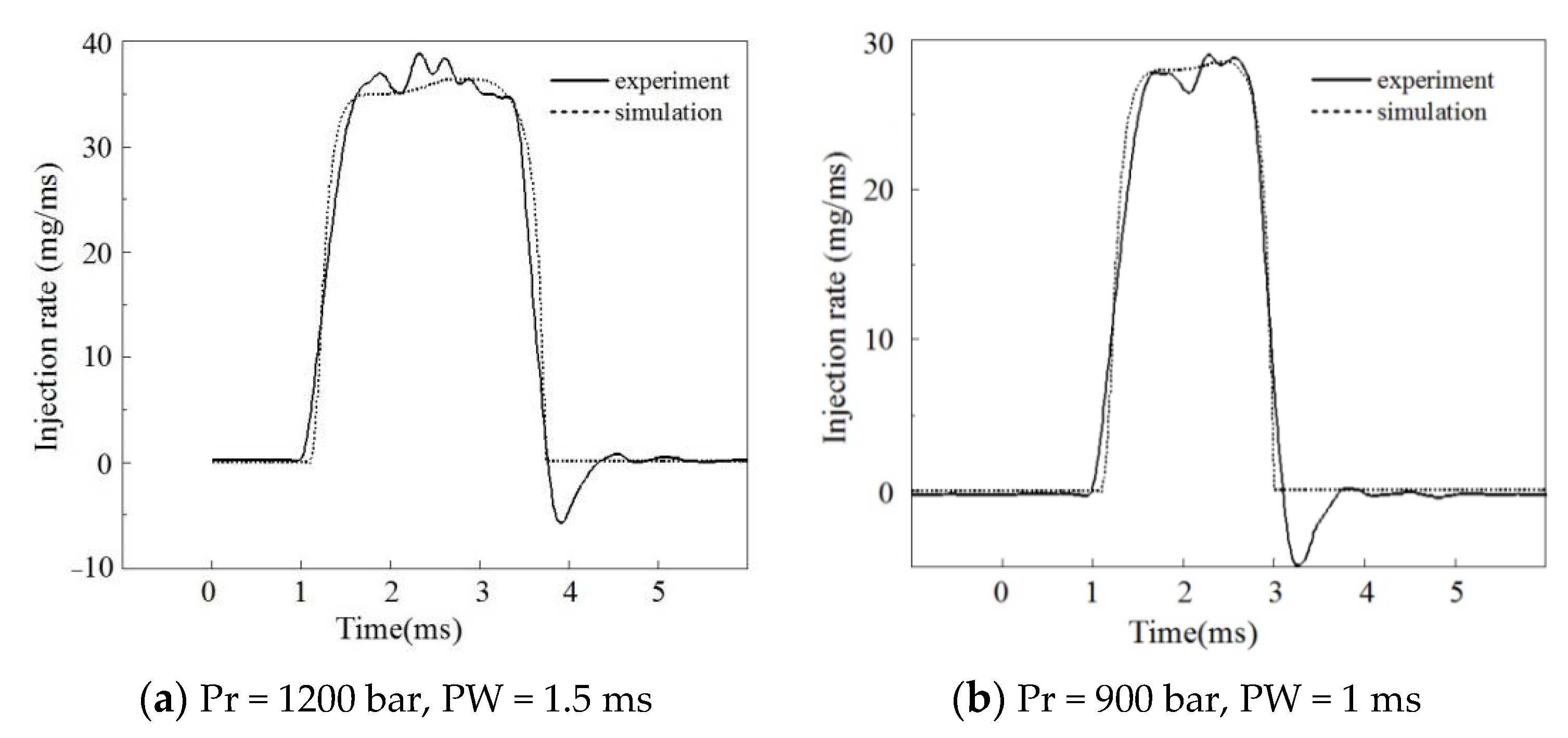
3.3.2. Model Validation of the Injector
4. Injection Characteristics Analysis of the Piezoelectric Injector
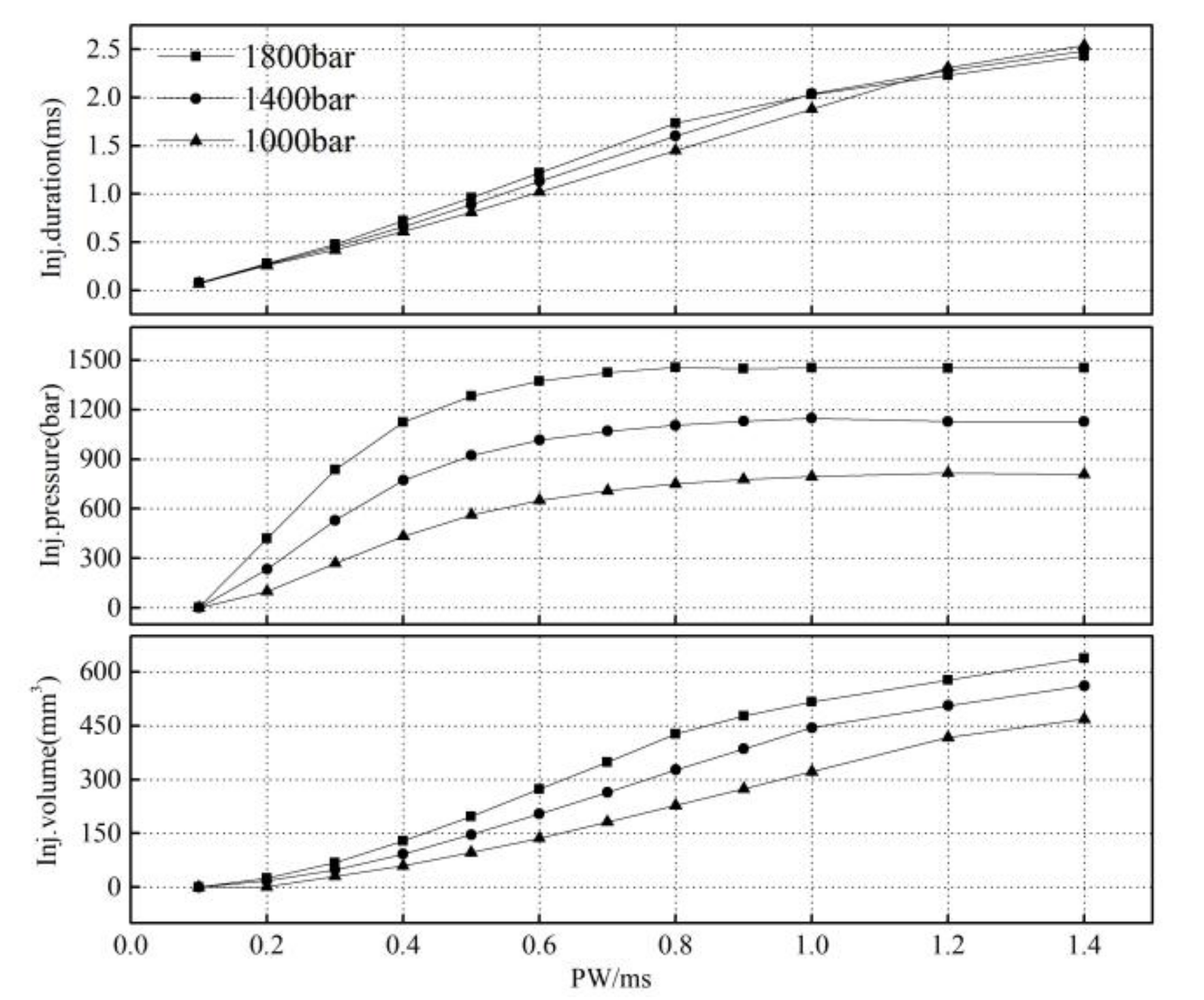
4.1. Analysis of the Fuel Quantity Characteristics of the Injector
4.2. Analysis of the Influence Factors on the Small-Quantity Fuel Injection
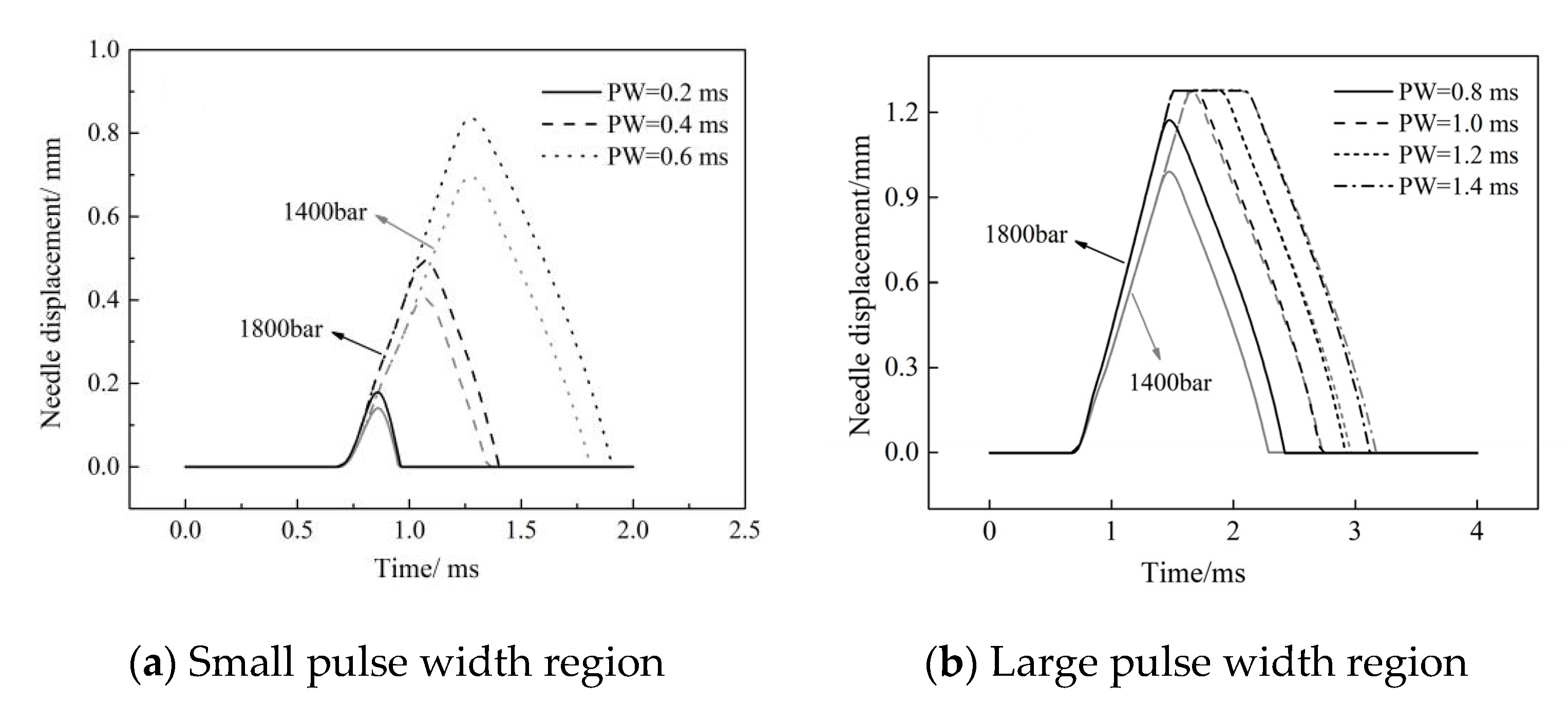
4.2.1. Influence of the Control Parameters
4.2.2. Influence of the Structure Parameters
- (1)
- Influence of the bypass valve
- (2)
- Influence of the inlet and outlet orifices
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
Nomenclature
| S3 | Strain |
| T3 | Stress, Pa |
| E3 | The electric field strength, V/mm |
| Y33 | Elastic modulus of the piezoelectric ceramic |
| D3 | The potential shift, C/m |
| ε33 | The dielectric constant of the piezoelectric ceramic |
| d33 | The piezoelectric constant |
| C | Equivalent capacitance of each ceramic slice, F |
| A | The area of the electrode surface of the ceramic sheet, m2 |
| ρ | Fuel density, kg/m3 |
| v | Voltage applied across the piezoelectric ceramic, V |
| a | The electric field scale coefficient |
References
- Lee, J.; Min, K. Effect of needle response on spray characteristics in a high-pressure injector driven by piezo-actuator for the CR injection system. J. Mech. Sci. Technol. 2005, 19, 1194–1205. [Google Scholar] [CrossRef]
- Suh, H.K.; Park, S.W.; Lee, C.S. Effect of piezo-driven injection system on the macroscopic and microscopic atomization characteristics of diesel fuel spray. Fuel 2007, 86, 2833–2845. [Google Scholar] [CrossRef]
- Bianchi, G.M.; Pelloni, P.; Filicori, F.; Vannini, G.O. Ptimization of the solenoid valve behavior in CR injection systems. SAE Int. 2000, 109, 2130–2139. [Google Scholar]
- Taylor, C.; Washington, G. Comprehensive Piezoceramic Actuator Review. In Proceedings of the SPIE-The International Society for Optical Engineering, San Diego, CA, USA, 15 July 2002; 4701, pp. 443–444. [Google Scholar]
- Jinsu, K.; Juwan, K.; Seokcheol, J.; Han, S.; Lee, S. Effects of different piezo-acting mechanism on two-stage fuel injection and CI combustion in a CRDiengine. J. Mech. Sci. Technol. 2016, 30, 5727–5737. [Google Scholar]
- Klügl, W.; Boll, C.; Krüger, G.; Nigrin, U. New Piezo Injection System for Increased Efficiency of Diesel Engines. MTZ Worldw. 2016, 77, 46–49. [Google Scholar] [CrossRef]
- Park, S.H.; Kim, H.J.; Lee, C.S. Effect of Multiple Injection Strategies on Combustion and Emission Characteristics in a Diesel Engine. Energy Fuels 2016, 30, 810–818. [Google Scholar] [CrossRef]
- Wei, J.; Zengyang, W.; Roberts, W.L.; Fang, T. Spray combustion of biomass-based renewable diesel fuel using multipleinjection strategy in a constant volume combustion chamber. Fuel 2016, 181, 718–728. [Google Scholar]
- Ziman, W.; Miroslaw, L.W.; Hongming, X.; Abdullah, N.R.; Piaszyk, J. Fuel injection and combustion study by the combination of mass flow rate and heat release rate with single and multiple injection strategies. Fuel Process. Technol. 2015, 132, 118–132. [Google Scholar]
- Nao, H.; Jianguo, Y.; Peilin, Z.; Hu, Y. Study of the impact of structural parameters on the dynamic response of an electronic fuel injector. Energy Convers. Manag. 2017, 136, 202–219. [Google Scholar]
- Lee, J.; Min, K. Hydraulic Simulation and Experimental Analysis of NeedleResponse and Controlled Injection Rate Shape Characteristics in a Piezo-driven Diesel Injector; SAE Paper: Tornoto, ON, Canada, 2006. [Google Scholar]
- Satkoski, C.A.; Shaver, G.M.; More, R.; Meckl, P.; Memering, D. Dynamic Modeling of a Piezoelectric Actuated Fuel Injector. J. Dyn. Syst. Meas. Control. 2011, 133, 235–240. [Google Scholar] [CrossRef]
- Pogulyaev, Y.D.; Baitimerov, R.M.; Rozhdestvenskii, Y.V. Detailed dynamic modeling of common rail piezo injector. Procedia Eng. 2015, 129, 93–98. [Google Scholar] [CrossRef] [Green Version]
- Yifan, L.; Wenjun, Z. Study on Modeling and Control Technology for Piezoelectric Actuators. Piezoelectrics Acoustooptics 2016, 38, 363–366. [Google Scholar]
- Rui, X.; Miaolei, Z. Sliding mode control with sigmoid function for the motion tracking control of the piezo-actuated stages. Electron. Lett. 2017, 53, 75–77. [Google Scholar]
- Wang, X.; Reysett, A.; Valérie, P.B.; Gourinat, Y. A modified Preisach model and its inversion for hysteresis compensation in piezoelectric actuators. Multidiscip. Modeling Mater. Struct. 2014, 10, 122–142. [Google Scholar] [CrossRef]
- Cao, Y.; Chen, X. B. A Survey of Modeling and Control Issues for Piezo-Electric Actuators. J. Dyn. Syst. Meas. Control. 2015, 137, 1–13. [Google Scholar]
- Smith, R.C.; Hom, C.L. Domain Wall Model for Ferroelectric Hysteresis. In Proceedings of the SPIE-Smart Structures and Materials 1999 Conference, Newport Beach, CA, USA, 4 June 1999; 3667, pp. 150–161. [Google Scholar]






















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Longitudinal Piezoelectric Constant (m/V) | 850 |
| Dielectric constant (F/m) | 3.08 × 10−8 |
| Elastic modulus (N/m2) | 4.57 × 1010 |
| Layer number of ceramic sheets | 600 |
| Ceramic sheet thickness (m) | 9 × 10−5 |
| Electrode area (m2) | 25 × 10−6 |
| Equivalent capacitance (μF) | 5.13 |
| Equivalent impedance (Ω) | 0.62 |
| Mass (kg) | 0.042 |
| Stiffness coefficient (N/m) | 1.5 × 107 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, Z.; Liu, N.; Liu, J. Study of the Influencing Factors on the Small-Quantity Fuel Injection of Piezoelectric Injector. Micromachines 2022, 13, 813. https://doi.org/10.3390/mi13050813
Liu Z, Liu N, Liu J. Study of the Influencing Factors on the Small-Quantity Fuel Injection of Piezoelectric Injector. Micromachines. 2022; 13(5):813. https://doi.org/10.3390/mi13050813
Chicago/Turabian StyleLiu, Zhenming, Nan Liu, and Jingbin Liu. 2022. "Study of the Influencing Factors on the Small-Quantity Fuel Injection of Piezoelectric Injector" Micromachines 13, no. 5: 813. https://doi.org/10.3390/mi13050813
APA StyleLiu, Z., Liu, N., & Liu, J. (2022). Study of the Influencing Factors on the Small-Quantity Fuel Injection of Piezoelectric Injector. Micromachines, 13(5), 813. https://doi.org/10.3390/mi13050813