1. Introduction
In this paper, we continue our previous work on the dielectrophoresis (DEP) behavior of highly and low conductive 2D spheres, which we modeled from the system’s-perspective in the classical plane-versus-pointed electrode configuration [
1]. The model also accounts for experimental findings of very high forces observed in the trapping of viruses and proteins in field cages or at electrode edges, where the dipole approach cannot explain sufficiently high forces to overcome disruptive Brownian motion [
2,
3,
4,
5,
6].
Our new model considers DEP as a “conditioned polarization process” that causes a steady, irreversible increase in the total polarizability of DEP suspension systems following the law of maximum entropy production (LMEP) [
7,
8]. While the field energy invested in the polarization of usual dielectrics, e.g., that of a capacitor, is stored and recovered during discharge, the energy invested in the “conditioned polarization” is dissipated. It cannot be recovered during discharge, although the polarizability of the system has been increased.
We were able to show that the LMEP provides a powerful phenomenological criterion for describing AC-electrokinetic torques and forces [
1,
9,
10]. The criterion is the basis of our new DEP model that simplifies the computation of the DEP behavior in complex field environments, something which is especially important in microchambers, where complicated field distribution and inhomogeneous object polarization are typical, because the objects are relatively large for the chamber [
11,
12,
13,
14,
15,
16]. The simple Clausius-Mossotti factor (induced dipole) description becomes problematic [
5,
6,
17,
18] because the total force results from the superposition of contributions from the entire volume of the inhomogeneously polarized object with the inhomogeneous field.
In the first DEP model from the system’s perspective, we derived the classical dipole force expression from the capacitive charge-work gradient on a suspension of a single object in an inhomogeneous field [
10]. In the previous paper, we extended this approach by introducing a conductance field for the entire DEP chamber, which describes the effective polarizability of the DEP system in the form of the DC conductance dependent on the object’s position [
1]. The conductance field is one version of a “polarizability field”, which can be calculated from a matrix containing the overall chamber conductance for each accessible position of the object center. The capacitance field is the high-frequency equivalent of the conductance field.
Both fields are identical for the same conductance or permittivity ratios between the object and medium. The same ratios would also reflect the same effective polarizability differences at the low- and high-frequency limits, respectively. At these limits no out-of-phase (imaginary) components occur and the conductance and capacitance fields describe the DEP behavior of the objects in full. The fields inherently account for inhomogeneous object polarization, mirror charges, electrode shielding effects, etc. However, out-of-phase components may contribute to the system’s overall charge work and dissipation at frequencies between the limiting cases. In such cases, the DEP force cannot simply be calculated from the difference in the overall capacitive charge work or dissipation between the two DEP positions because the dissipation of out-of-phase components, which do not contribute to DEP, depend on the position of the object. Therefore, these components are not nullified in the charge work or dissipation differences used to calculate the DEP force and must be considered separately [
10].
Here, we use “conductance fields” calculated using the conductance matrix values as interpolation points for the MatLab
® quiver-line function [
1]. For each given start position, the complex trajectories of the sphere’s center follow the conductance gradient, i.e., each step increases the overall conductance of the DEP system and hence the dissipation of electric field energy.
In the classical dipole model, objects with an effective conductivity lower or higher than that of the suspension medium usually show negative or positive DEPs; in other words, they move counter to or in the direction of the field gradient. In the dipole model, the DEP force is:
where
,
,
,
,
and
are the induced dipole moment, the effective external field, the permittivities of vacuum and external medium, the volume of an ellipsoidal object, and the real part of its Clausius-Mossotti factor along the semiaxis oriented in field direction [
10]. The small level of inhomogeneity induced in the object by the weakly inhomogeneous external field is neglected. The shape and frequency dependence of the dipole moment of ellipsoidal or cylindrical objects is summarized by the unitless (usually complex) Clausius-Mossotti factor. Its real, in-phase part governs DEP. Moreover, 3D cylinders oriented perpendicular to the field plane and 2D spheres have depolarizing coefficients of 1/2. Using the effective conductivities for the external
and object
media, then according to [
19,
20] the real part of the Clausius-Mossotti factor is:
Equation (1) contains the complete volume term to clearly reflect the DEP force’s ponderomotive (bodily) nature. Accordingly, the Clausius-Mossotti factor of Equation (2) is three times larger than the common expression because the depolarizing coefficient of the 3D sphere of 1/3 has not been extracted and canceled out for the 1/3 in the volume term; a step that is only a simplification for 3D spheres [
5].
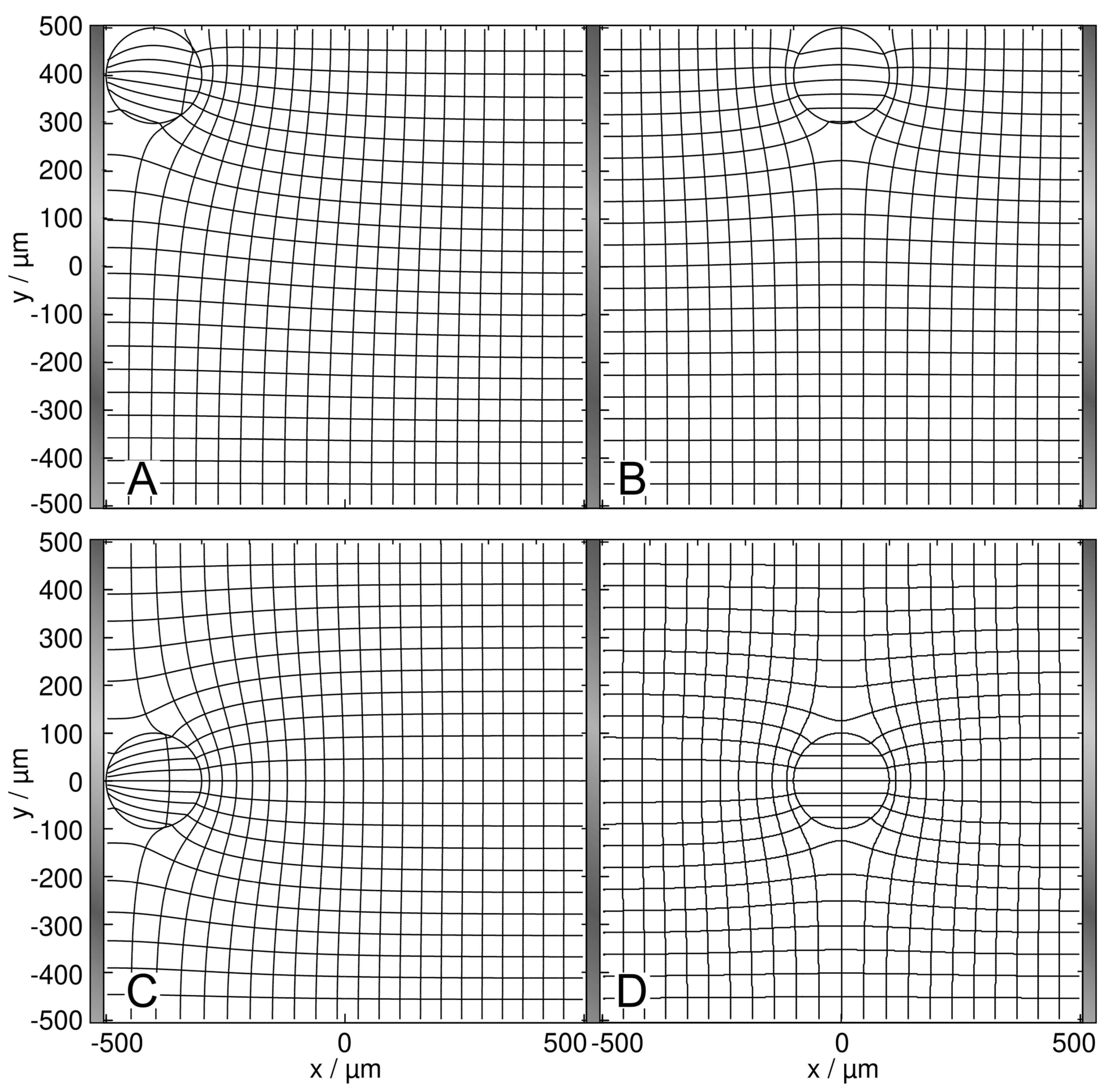
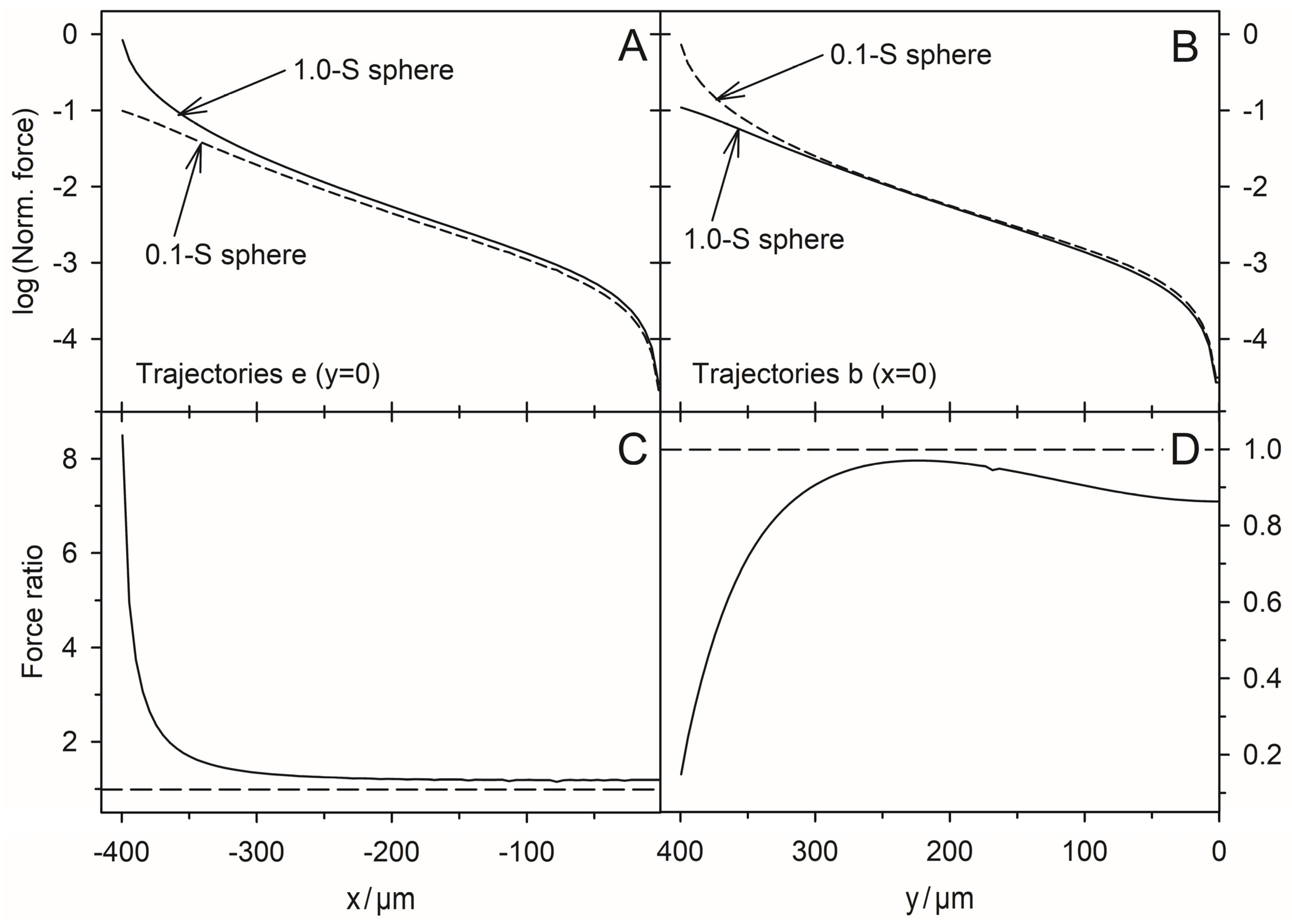
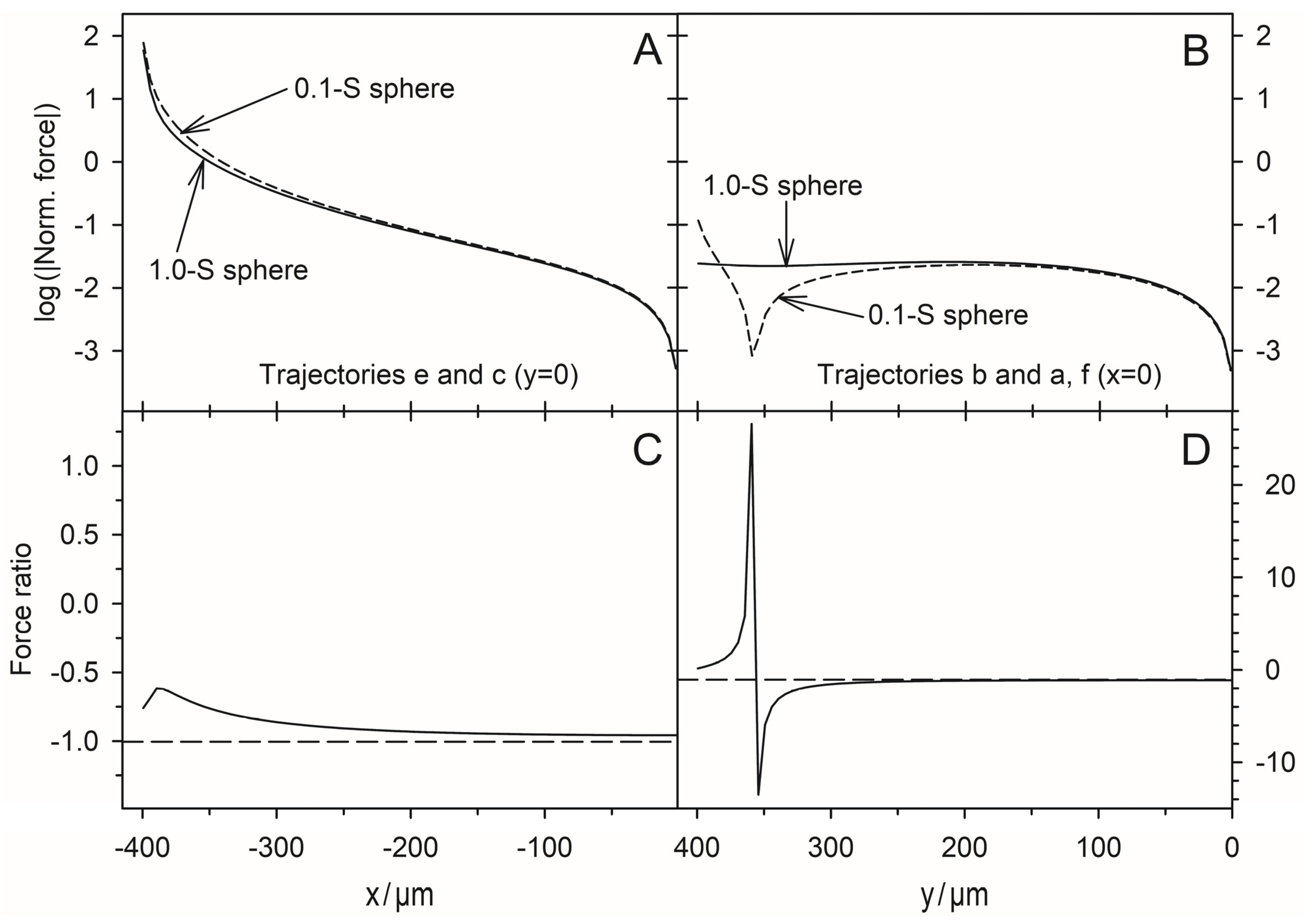
However, any real polarization ratio of an object and external medium, as well as the resulting Clausius-Mossotti factors occurring for frequency-dependent properties of homogeneous objects at a given frequency can be obtained by combinations of appropriate DC conductivities for the external and object media. As in the previous manuscript, we combine a tenfold ratio of external conductivity and object conductivity (1.0 S/m with 0.1 S/m and vice versa) corresponding to 2D conductances of 1.0 S and 0.1 S for the sphere and external medium. These parameters yield Clausius-Mossotti factors of −1.64 and 1.64 for 2D spheres.
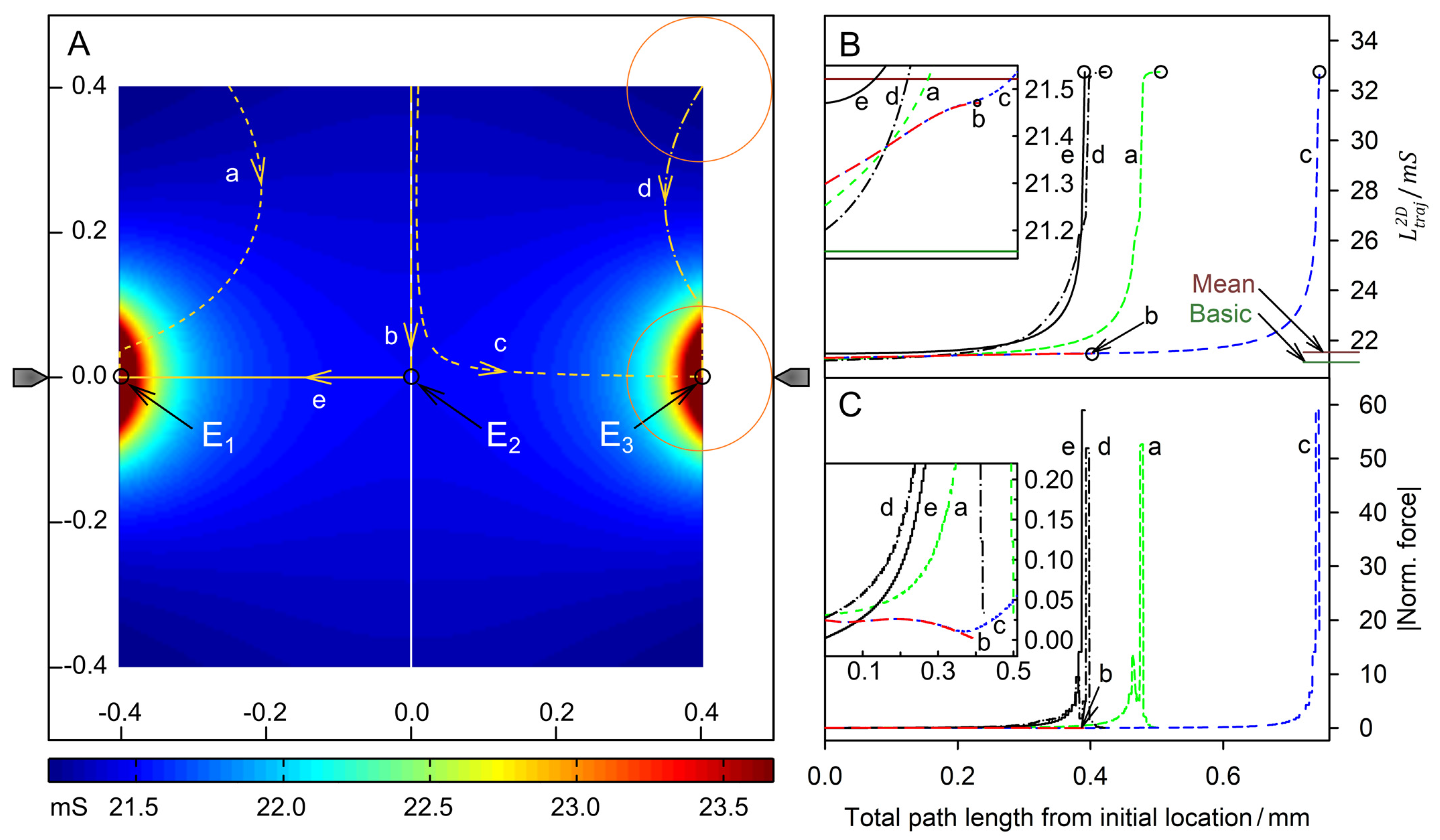
Equation (2) suggests the perfect reversal of the DEP force (Equation (1)) for inverse object and suspension medium properties. We have used this property for a “reversibility criterion” to check our model for consistency with the classical dipole model. We found that outside DEP chamber regions where dipole effects dominate, mirror charges may prevail, leading to the attraction of the highly polarizable object by the plane electrode against the field gradient. In the vicinity of the pointed electrode, inhomogeneous polarization of the 2D spheres resulted in extraordinarily high attractive and repulsive forces for the high and low-conductive spheres that were more than a thousand and five hundred times higher than in the dipole range, respectively. These high forces may explain experimental findings such as the accumulation of viruses and proteins in field cages or at electrode edges, where the dipole approach cannot account for forces high enough to overcome Brownian motion [
2,
3,
4,
5,
6].
2. Theory: Conductance Change and DEP Force
The effective conductivity and the effective dielectric constant are measures of the polarizability of a suspension. DEP leads to a steady increase in both parameters [
10]. At the low (
) and high (
) frequencies, the imaginary parts of the parameters and the reactive components in the conductive work and the capacitive charge work disappear, simplifying the modeling of the DEP force with either of the two work approaches. The following brief derivation introduces the parameters for the conductive work approach. A detailed derivation can be found in [
1].
A chamber of cuboid shape with plane-parallel rectangular
by
electrodes of distance
is to be filled with a medium of specific conductivity
. The conductance of the chamber is:
The cell constant
is the generalized geometry factor relating the conductance for chambers of any given geometry to the conductivity of the measured medium. For example, by combining the 3D suspension conductivity with a thickness of
, we obtain the specific sheet conductance
in Siemens and the unitless 2D cell constant
. Equation (3) reads:
For a 2D-DEP system with a single object suspended at locations
and
, for example, before and after a DEP step, the effective conductance of the 2D suspension is
and
. The system conductance is:
The electrical work exerted on the system can induce DEP, which causes the dissipation of electrical energy to increase steadily. The difference in the total power dissipation at the two locations can be attributed to the DEP [
10]:
is the DC or rms AC voltage applied to the electrodes of the DEP chamber. For the fastest increase in the overall polarizability of the system, the DEP step from location
to
must be oriented in the direction of the maximum differential quotient of the electric work or, more generally, in the direction of the conductive work gradient, i.e., the power dissipation (cf. LMEP). With the step width
calculated from the location vectors
and
, the DEP force is proportional to:
where
defines the unit vector pointing in the direction of DEP translation. The DEP-induced differences in the Rayleigh dissipation (Joule’s heat) and in the overall conductance of the DEP system are always positive.
Numerically, the DEP trajectory of a single object can be calculated from the maxima of the differential quotients of the DC conductance (Equation (7)). To compare forces between the different chamber setups, Equation (7) was normalized to the square of the chamber voltage, the depth of
perpendicular to the sheet plane, and
the system’s sheet conductance without object.
Here, a unit less, normalized force is obtained. However, obtaining a “Newton” force to interpret experiments is important. This can be achieved either by normalizing the 3D version of Equation (7) to the force obtained at a location where the classical dipole approach remains applicable [
1] or by deriving the force directly from the capacitive charge work of the system [
10].
A linear counter force can initially be assumed throughout the bulk medium, generated by Stokes’ friction in order to interpret experimental DEP velocities. This approach neglects the nonlinear friction effects in the immediate vicinity of the electrode and chamber surfaces. However, once the object attaches to the surface, the hard surface generates the counterforce to the normal force component.
3. Materials and Methods
3.1. Software, Data Processing and Presentation
A 2D numerical solver based on the finite-volume method was implemented in MatLab
® (version R2018b). It was developed to simulate the potential distributions, current paths, and total conductance for arbitrary geometries and conductivity distributions with current sources [
21]. The total conductance data for the 2D system with 199 × 199 2D voxels were stored in a matrix and used as interpolation points for the MatLab
® quiver-line function to calculate the conductance field.
SigmaPlot 14.0 (Systat Software GmbH, Erkrath, Germany) was used for postprocessing and plotting data in line graphs. Inkscape 1.2.2 (GNU General Public License, version 3) was used to create graphical images and overlays of graphs with matrix images.
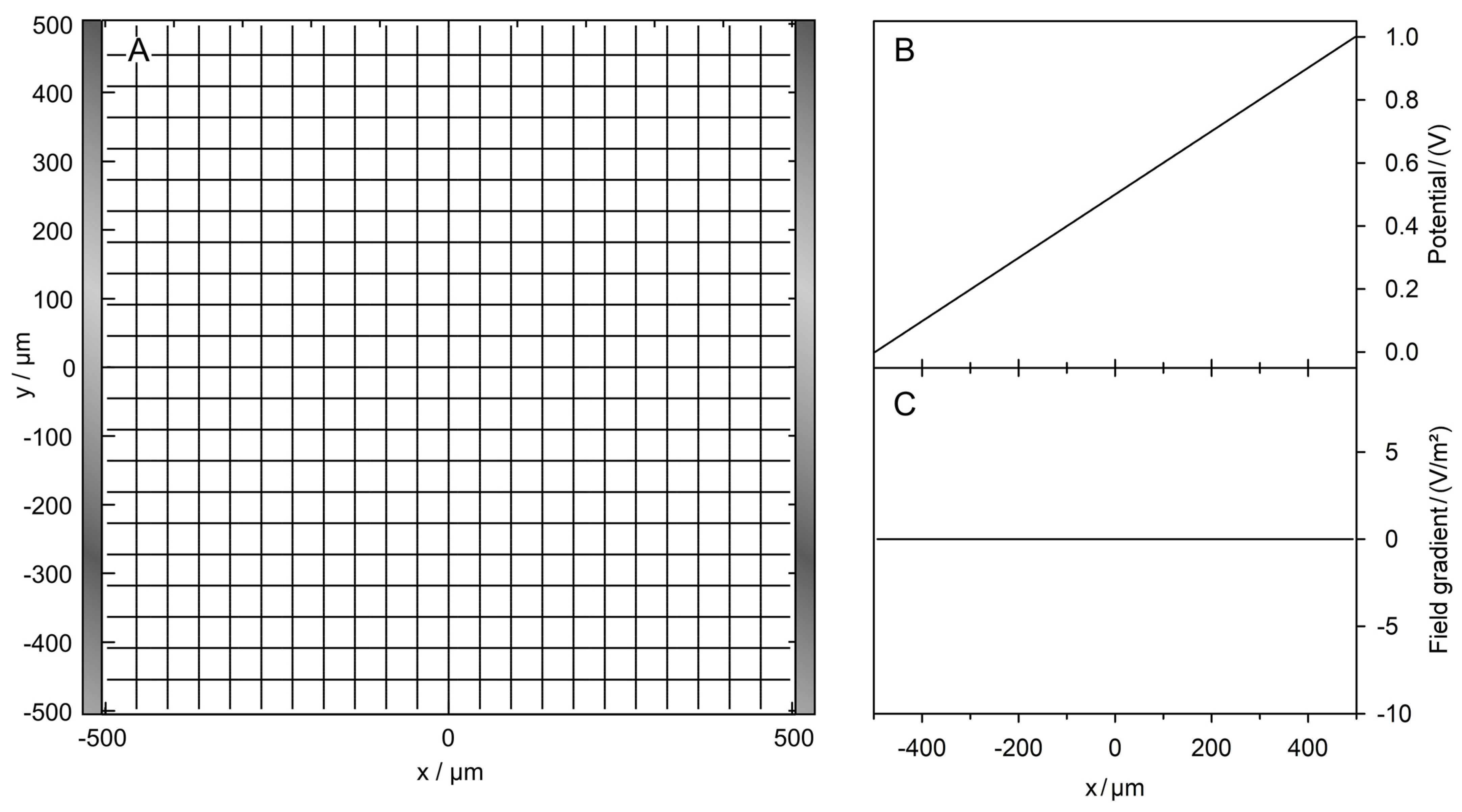
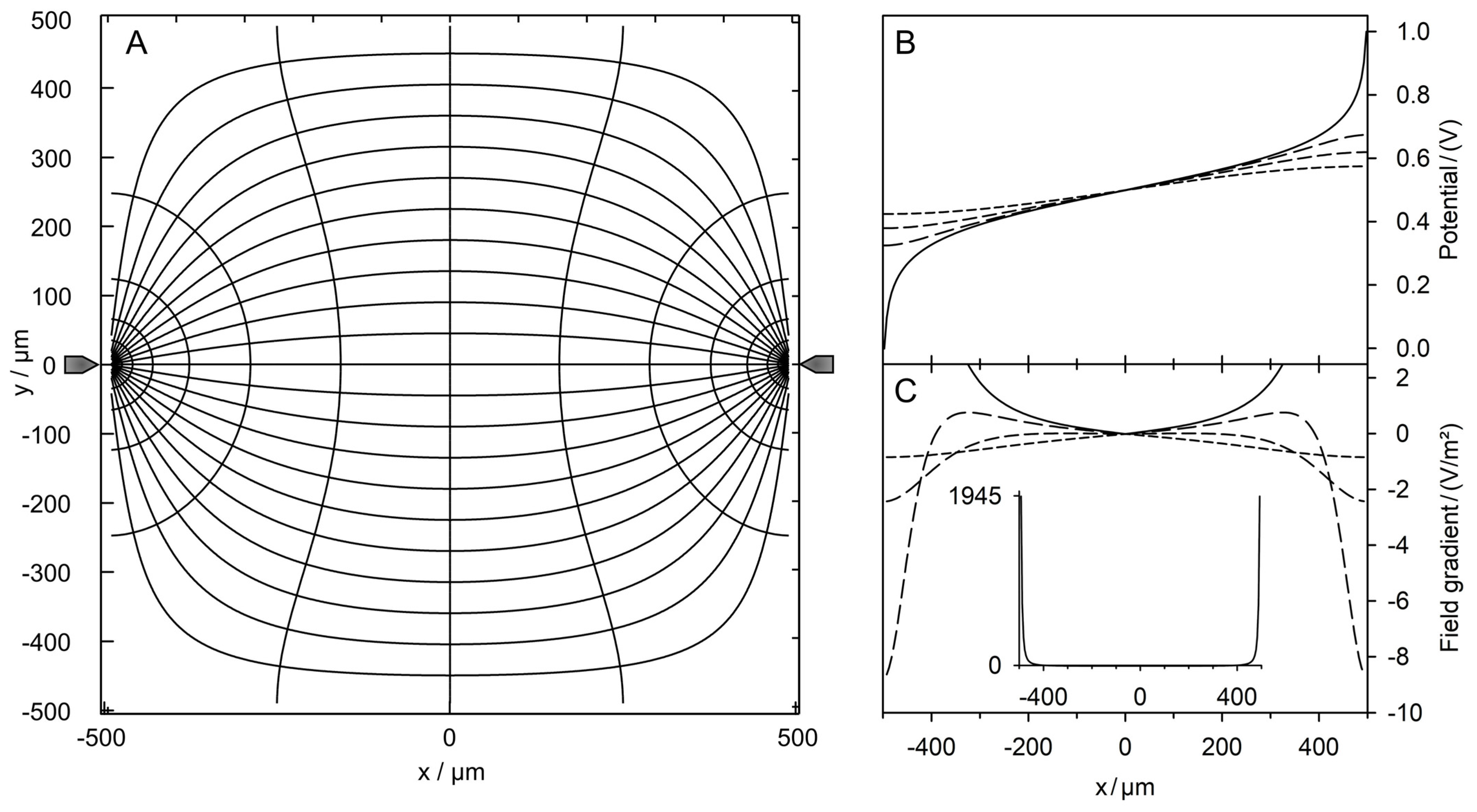
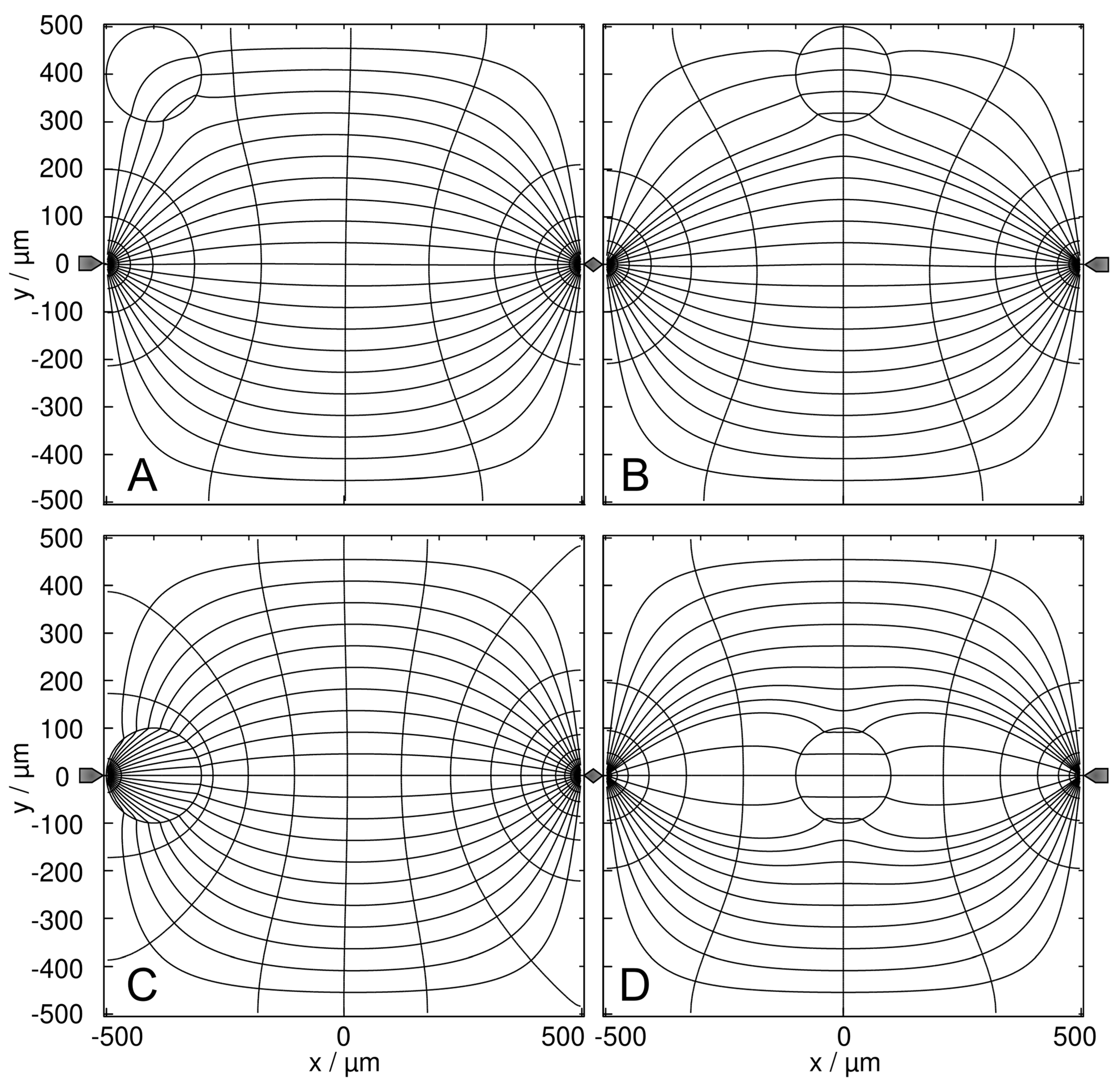
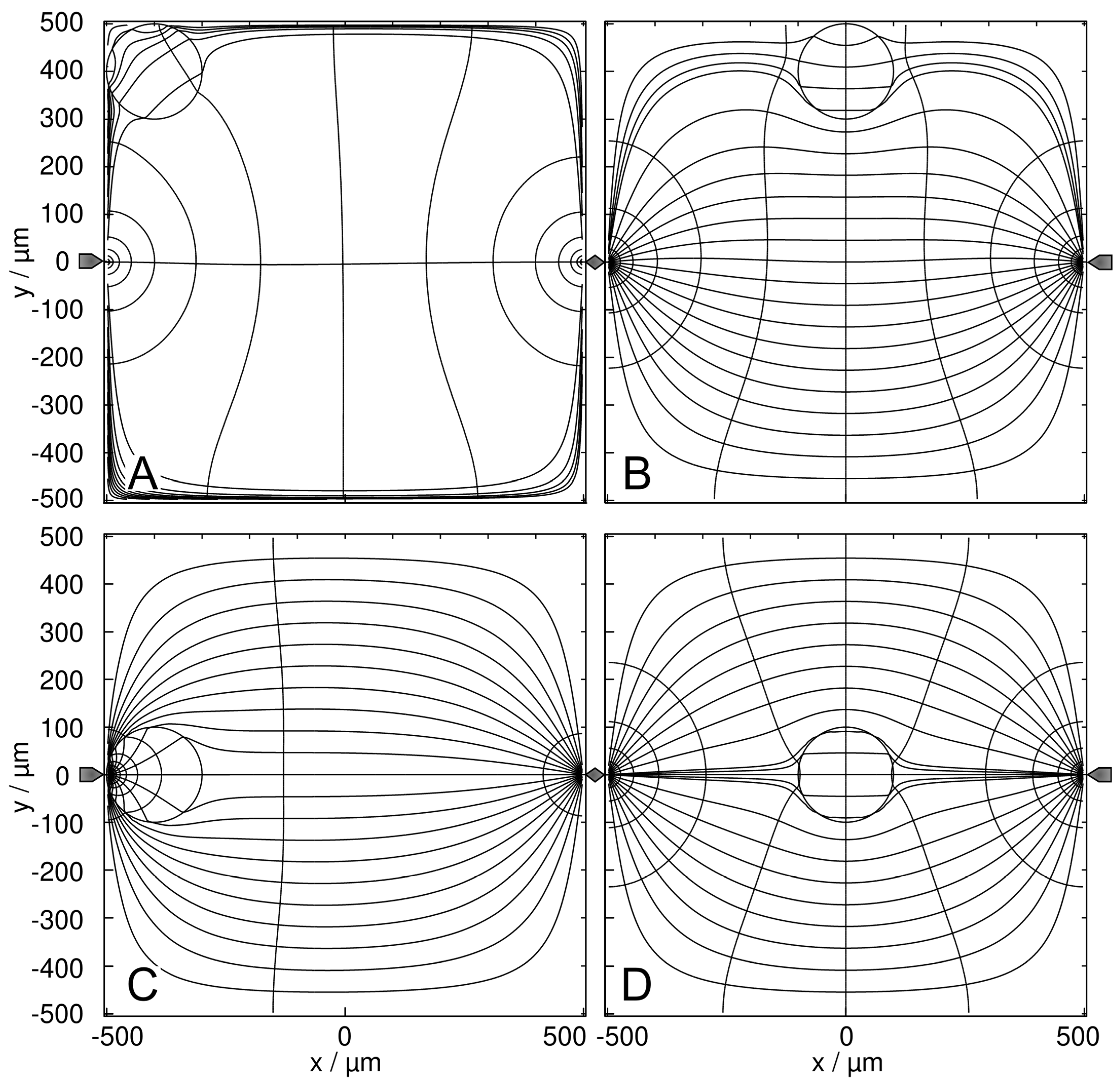
In the plots, 21 equipotential lines have been combined with 21 current lines instead of field lines. This permits a more precise presentation of the inhomogeneous polarization inside the objects because the current lines do not end on interfacial charges as the field lines. Accordingly, their mutual distance does not encode the field strength. A specific x-coordinate between the electrodes of the square volume was chosen where the current lines have been equidistantly distributed.
3.2. Numerical 2D Model
Without an object, a square chamber of confined by plane-parallel electrodes with a depth of 1 m perpendicular to the sheet plane has a (sheet) conductance of 0.1 and 1 S for volume conductivities of 0.1 and 1 S/m, respectively. The same sheet conductance results for square cm- or µm-size chambers with a depth of 1 m (Figure 1). Since only the conductance and no size-related, frequency-dependent polarizabilities are considered, the 2D model is independent of a specific dimension on the x–y plane. We assume an area of 1 × 1-mm2 for the DEP chamber, which is formed by 199 × 199 square elements to recognize microfluidic geometries. Each element, which we refer to as “2D voxels” was assigned a homogeneous sheet conductance.
The electrodes are located outside the chamber volume. The pointed and plane electrodes were formed by a single and a row of 199 highly conductive 500-S voxels, respectively. The sheet conductance of the chamber was calculated for all positions accessible to a single 200-µm 2D sphere with a diameter of 39 voxels [
1]. The odd number symmetry defines a single central voxel and allows precise localization with respect to the electrodes.
Equipotential lines and current lines were used to characterize the field distributions in the chambers. The basic conductance values of the chamber without an object were calculated with media of 0.1 S and 1.0 S from voltage and current using a MatLab® routine. The cell constants of the chambers were calculated from Equation (4) with negligible numerical differences for the two conductances.
5. Conclusions and Outlook
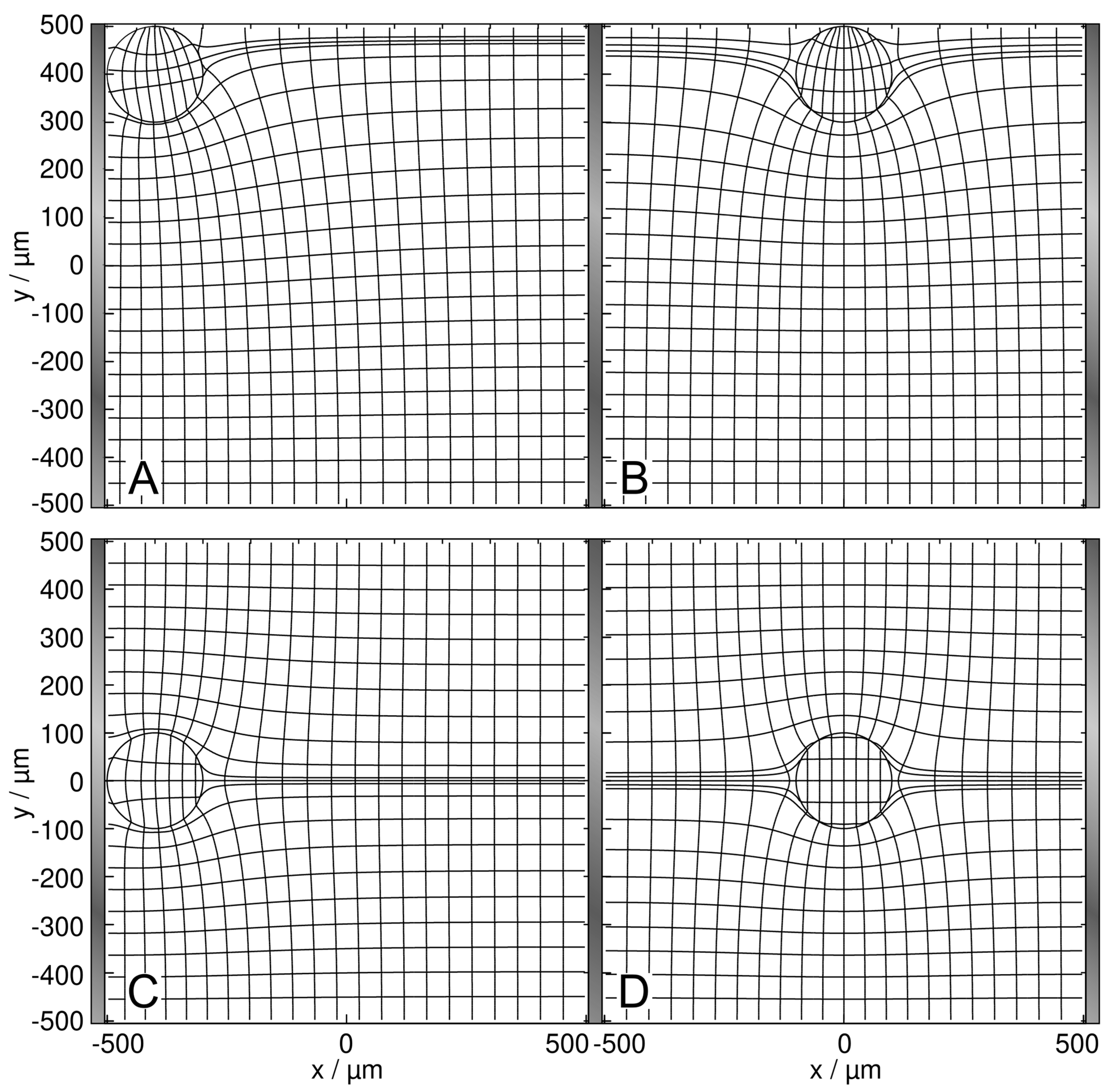
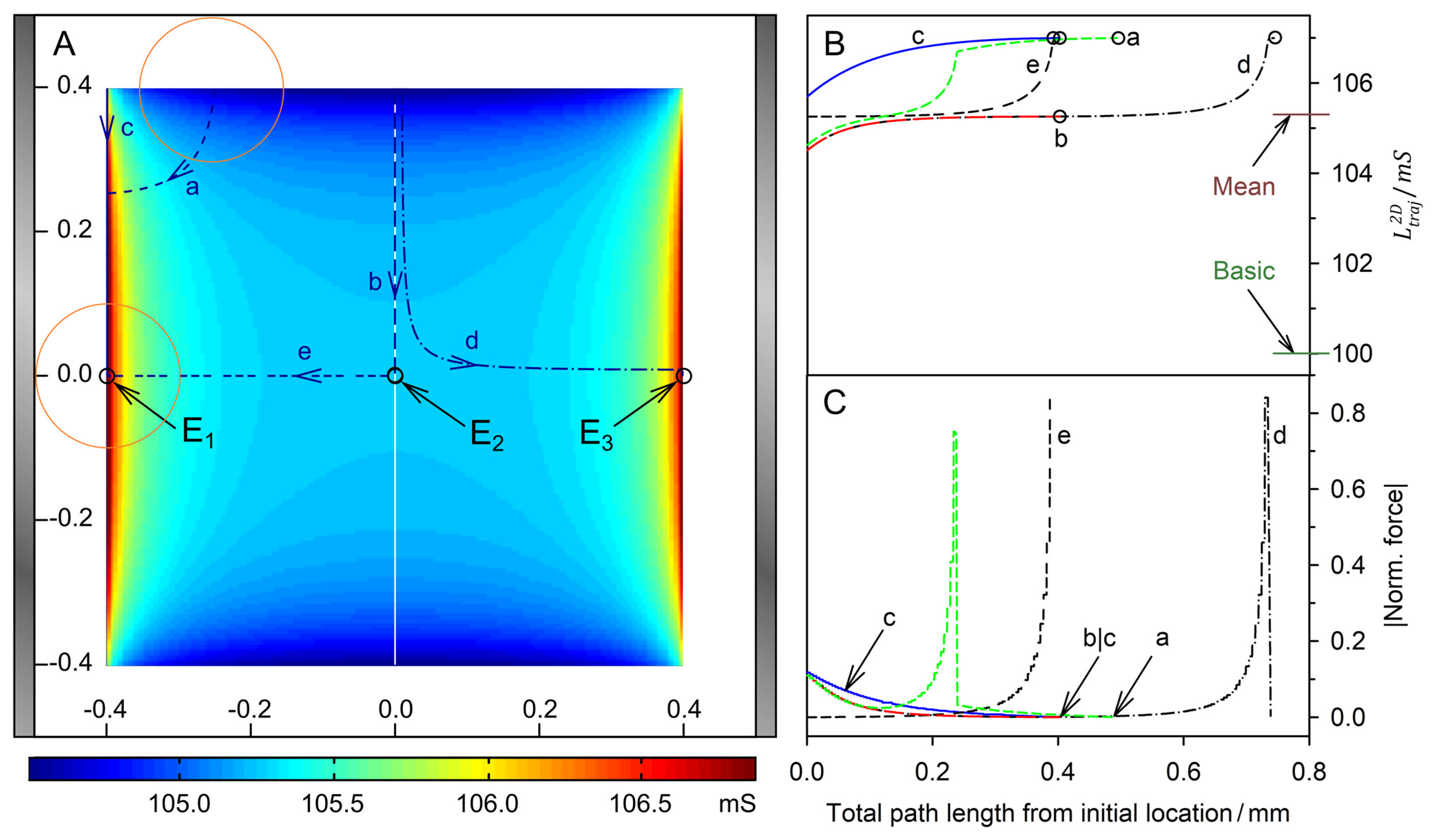
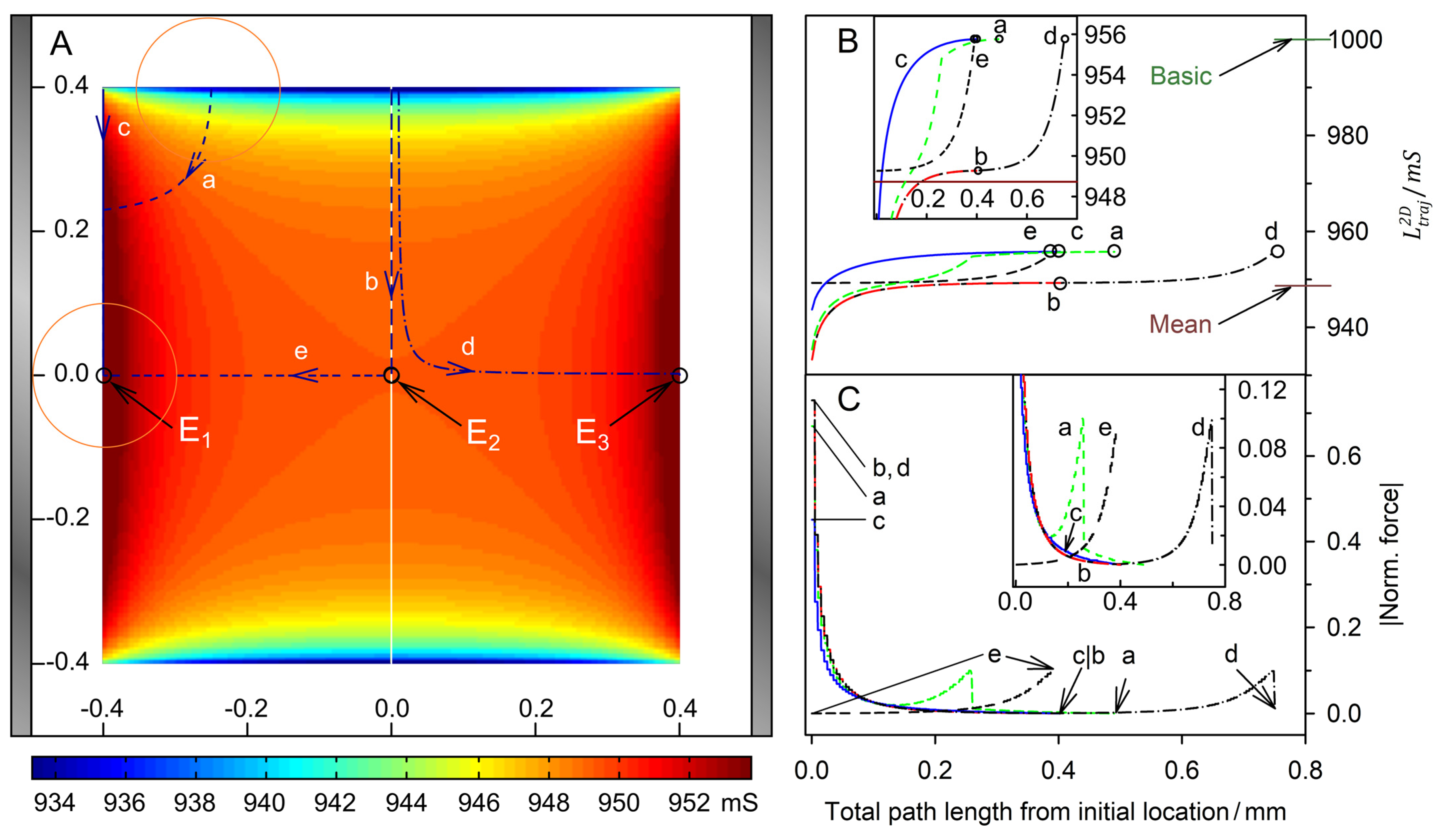
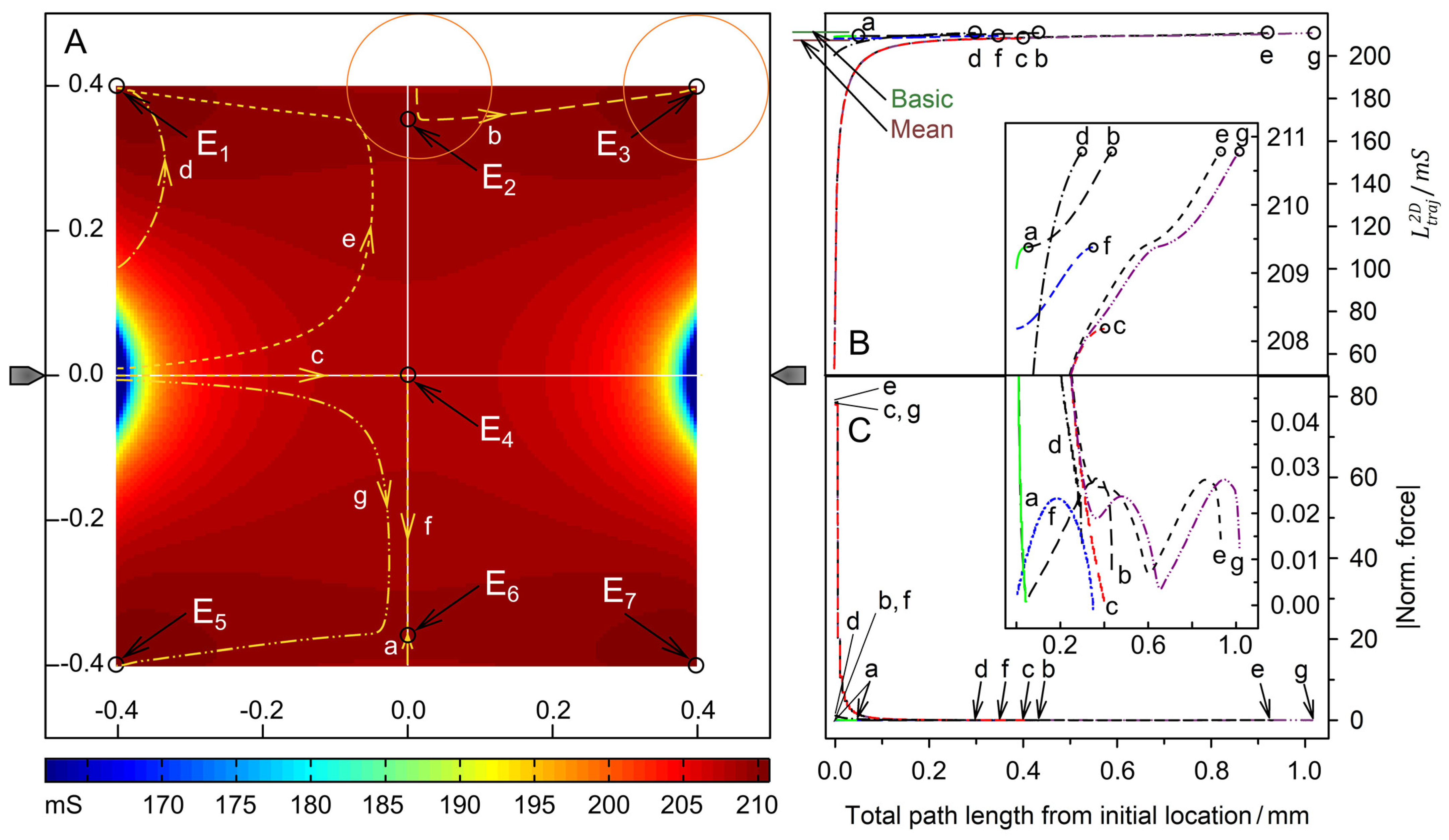
It seems to be a general phenomenon that high force peaks appear in the final steps along a projected conductance gradient (e.g., trajectories d in
Figure 5 and
Figure 6) before the sphere arrives at the surface of the electrode or the chamber wall. Movement along a projected conductance gradient causes a greater increase in conductance and, consequently, a higher force than the deflected movement in the attached state. Once the sphere reaches a surface, the counterforce to the DEP force is split into two vectorial components, the normal component generated by the counter-pressure of the electrode or wall, and the tangential component that is generated by surface and Stokes friction. Although the normal force component does not contribute to the shape of the trajectory, it does affect wall friction and is of interest for numerous other field phenomena.
Figure S1 (in Supplementary Materials) shows that the normal components can be estimated simply from the difference between the first two columns in the Excel spreadsheets.
The peak forces induced in the two chamber geometries are almost two orders of magnitude higher in front of the pointed electrodes than in front of the plane electrodes and more than three orders of magnitude higher than the ordinary dipole forces, which cannot overcome Brownian motion for viruses and proteins. Thus, the peak forces in front of the pointed electrodes can explain the accumulation of viruses and proteins in field cages or at electrode edges [
2,
5,
6].
From the point of view of the system, the work conducted on a volume of material can be stored (i) as electric field energy, (ii) as magnetic field energy, or (iii) dissipated according to Rayleigh’s dissipation function [
19,
26]. Our model considers the dissipation of electrical energy in the DEP system, which increases proportionally to its total conductance. Only a small proportion is “dissipated” in the friction effects of DEP translation itself, while this translation increases the conductance of the system. The thermodynamic aspects and approaches to explain the connections with the classical electrostatic approaches in AC-electrokinetics have been discussed in previous papers [
1,
10]. Regarding the electroorientation of homogeneous spheroids, it has been theoretically demonstrated that the field-induced torques are proportional to the induced increase in the system’s conductivity [
9].
From the object’s perspective, the DEP force is generated by the interaction of the inhomogeneous or, in the dipole approach, simplistically assumed homogeneous polarization of the object with the inhomogeneous external field. The system’s perspective provides a more general picture of the DEP by, for example, also taking into account inhomogeneities of the external field that are only generated by the presence of the object. The approach resolves the contributions of effects such as induced multipoles, mirror charges, electrode shielding, etc., which are tedious to model in object approaches, for example in the case of inhomogeneous object polarization in the plate capacitor’s homogeneous field.
In the conductance and capacitance fields, energy gradients fully describe the object’s DEP behavior. However, frequency-dependent models require consideration of the active and reactive contributions to the total work done on the system [
10]. We have used frequency-independent properties to avoid, in particular, the introduction of apparent (i.e., complex) permittivities and conductivities for the object and suspension medium. As in electrical machines, only the active components perform mechanical work, i.e., generate the DEP force. The reactive components (capacitively stored on the objects) are out of phase with the active components and are dissipated as heat. For a related discussion on the contributions of electronic polarization to the total field energy in lossy dielectrics, see also [
27].
The theoretical description of electrokinetic alternating current effects such as electroorientation, DEP, electrorotation or mutual attraction usually relies on (quasi-) electrostatic approaches. However, for lossy media, the validity of the approach is not clear per se, since electrostatic systems are generally in an equilibrium state without energy dissipation. Moreover, the induced electrokinetic effects must themselves lead to energy dissipation. Despite these seemingly severe problems, the experimental observations interpreted via object-oriented electrostatic models and the systems approach seem to agree surprisingly well.
The system’s approach will simplify the calculation of DEP forces in complex field environments. It can be extended to non-spherical objects, multi-body systems, or Janus particles, for example, to compute combined translation, orientation, and aggregation patterns. However, such calculations are computationally expensive, especially for 3D systems, which will require combining them with such methods as Monte Carlo simulations. The behavior of the 2D sphere in a four-electrode field cage is described in a subsequent paper.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}













