
Design and Development of a Traveling Wave Ferro-Microfluidic Device and System Rig for Potential Magnetophoretic Cell Separation and Sorting in a Water-Based Ferrofluid

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
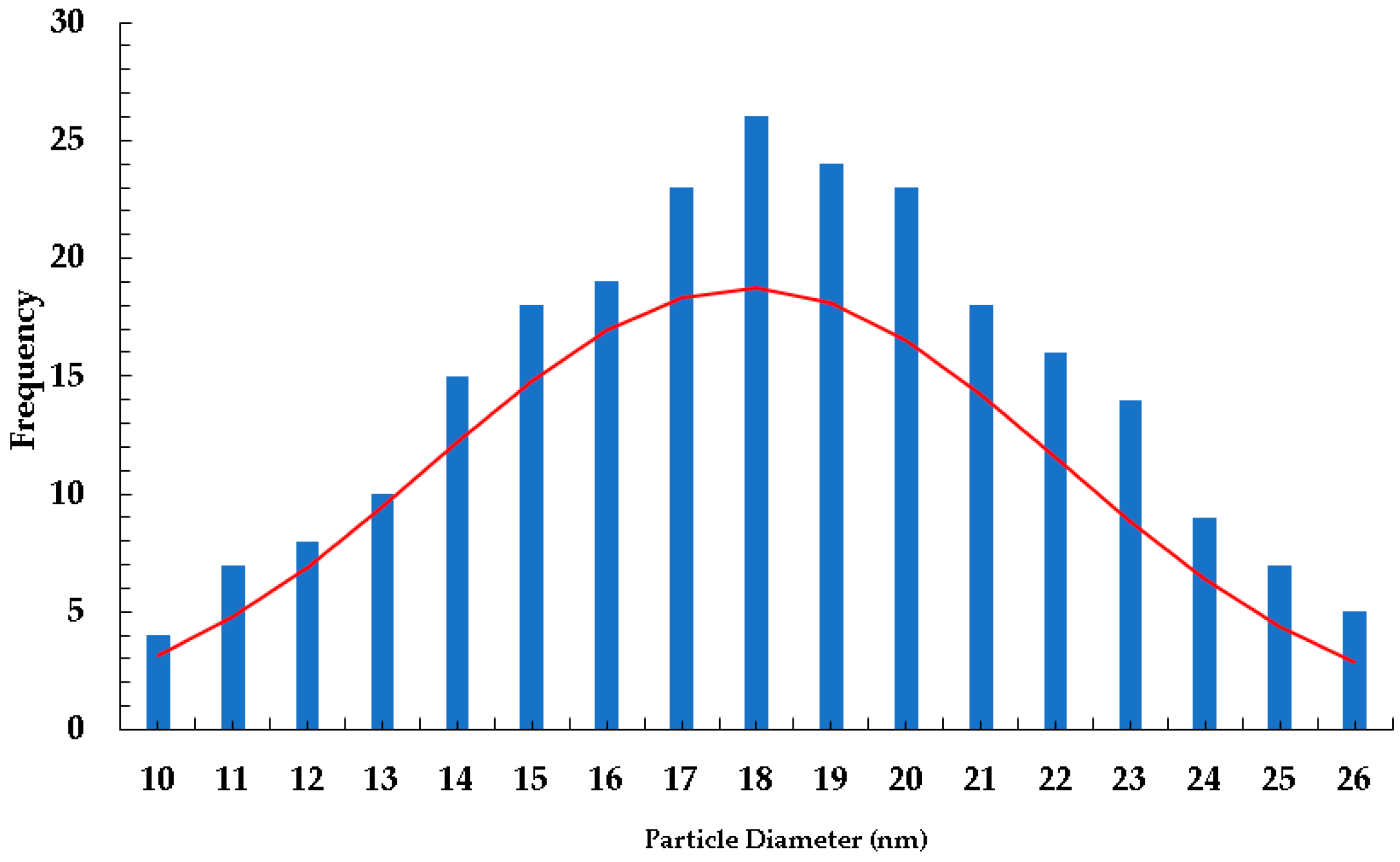
- A method for tailoring preferred size range (10–20 nm) magnetic cobalt ferrite magnetic nanoparticles.
- The development of a ferro-microfluidic device for potentially separating cells and magnetic microparticles without detrimental thermal effects.
- The development of a water-based ferrofluid with magnetic and non-magnetic particles as surrogates for biological cells.
- The design and development of a rig for producing the electric field within the ferro-micro fluidic device for magnetizing the magnetic nanoparticles and manipulating nanoparticles in static and dynamic flow while efficiently removing heat from the electrode base.
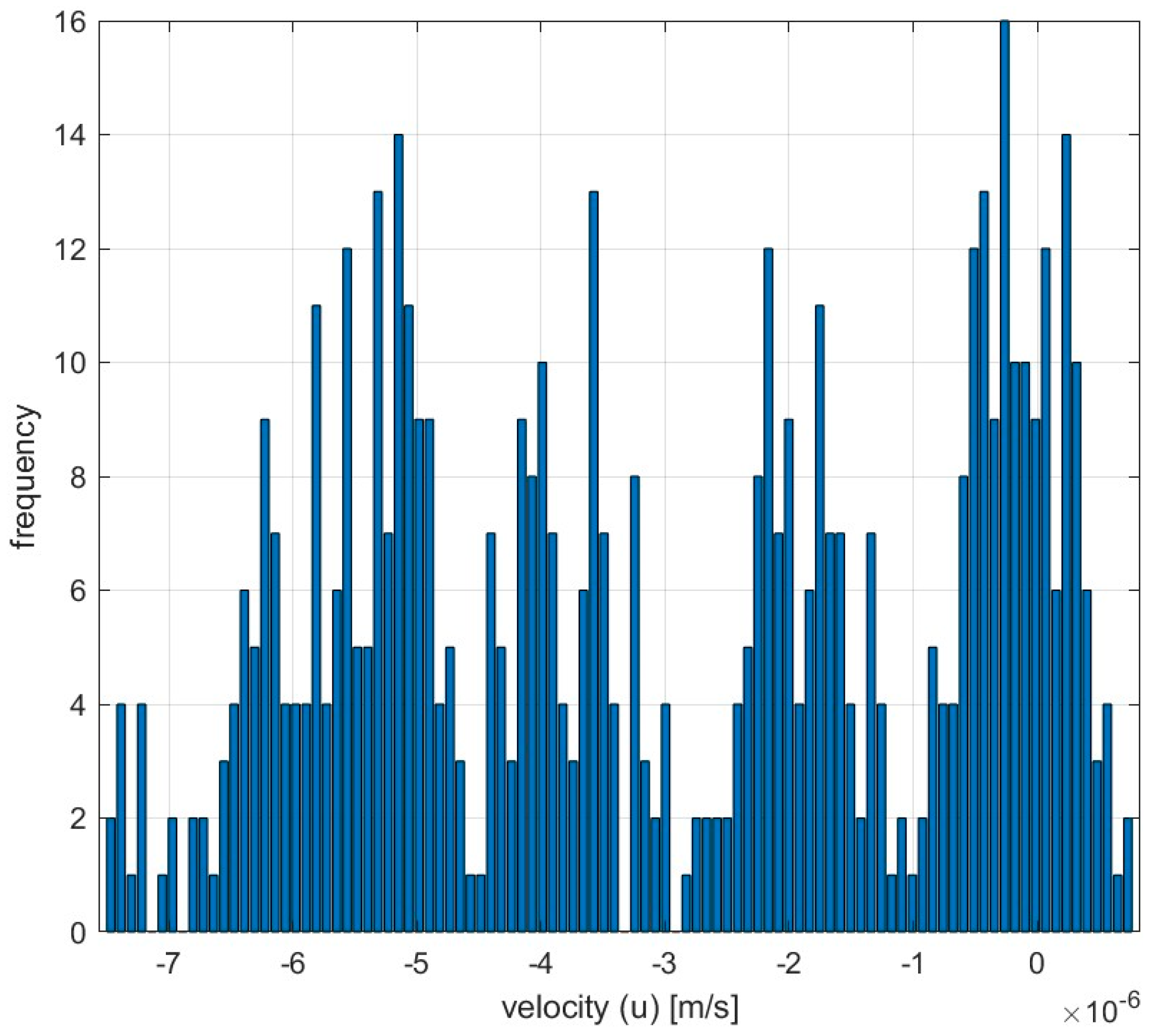
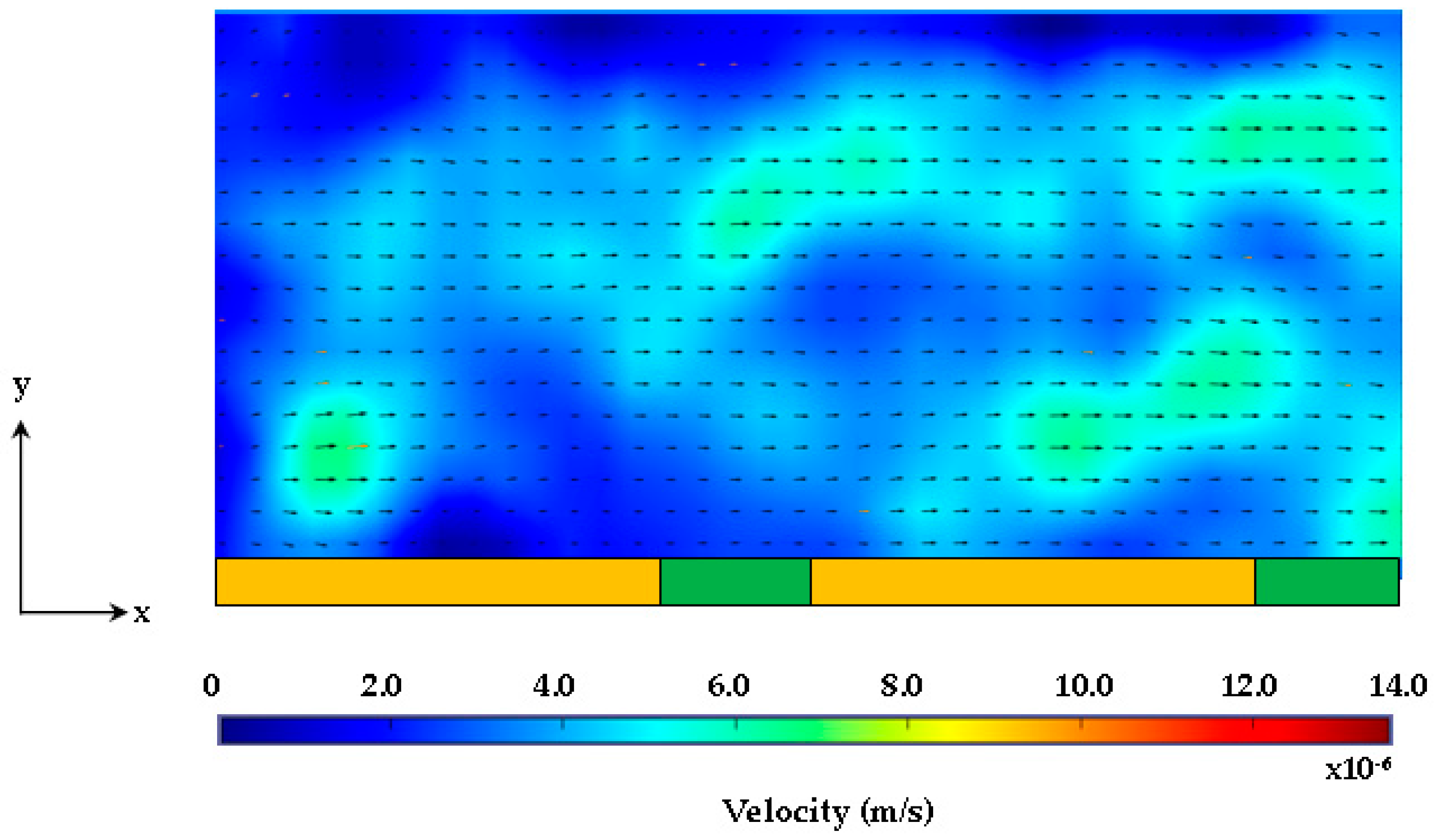
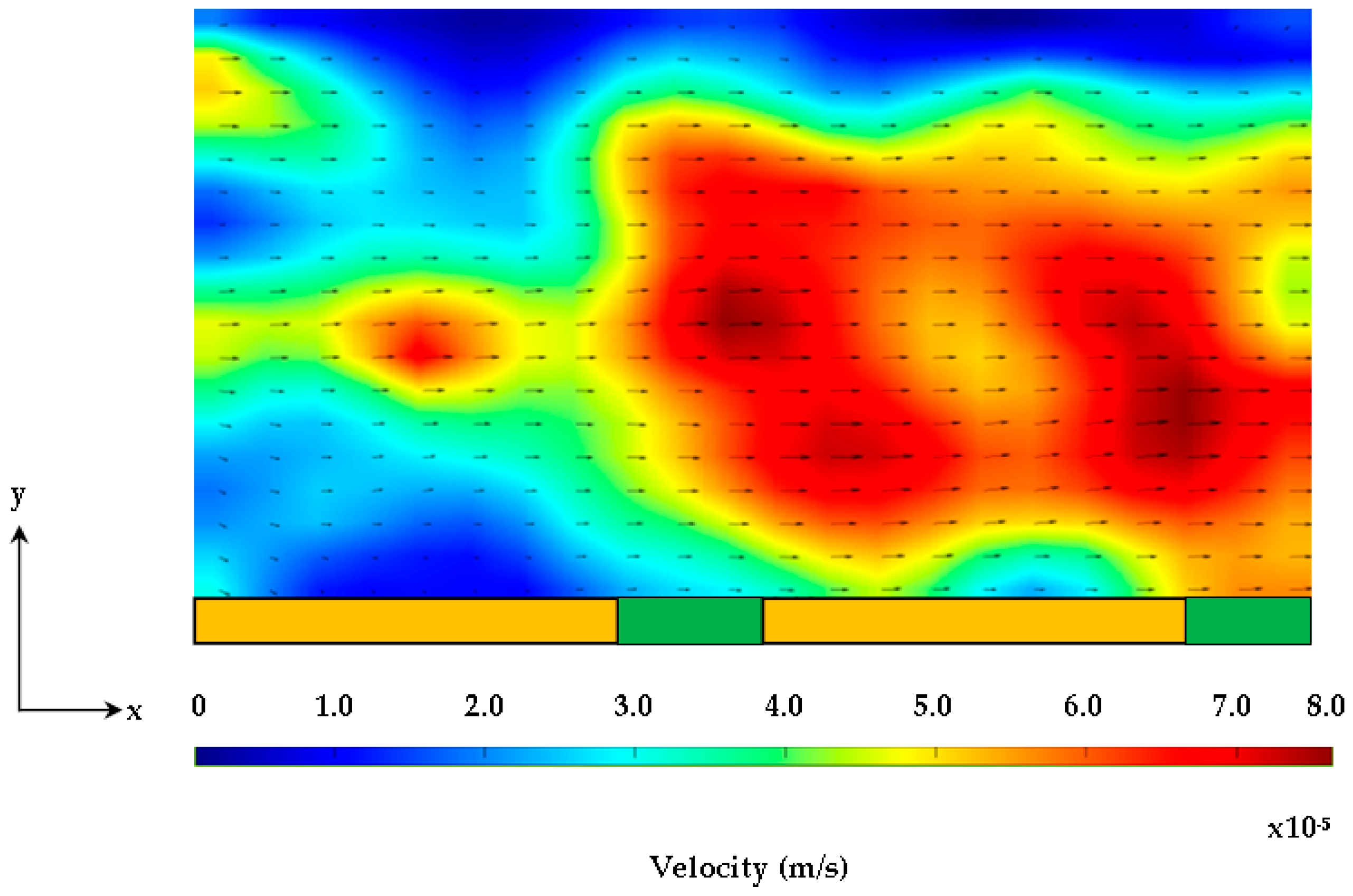
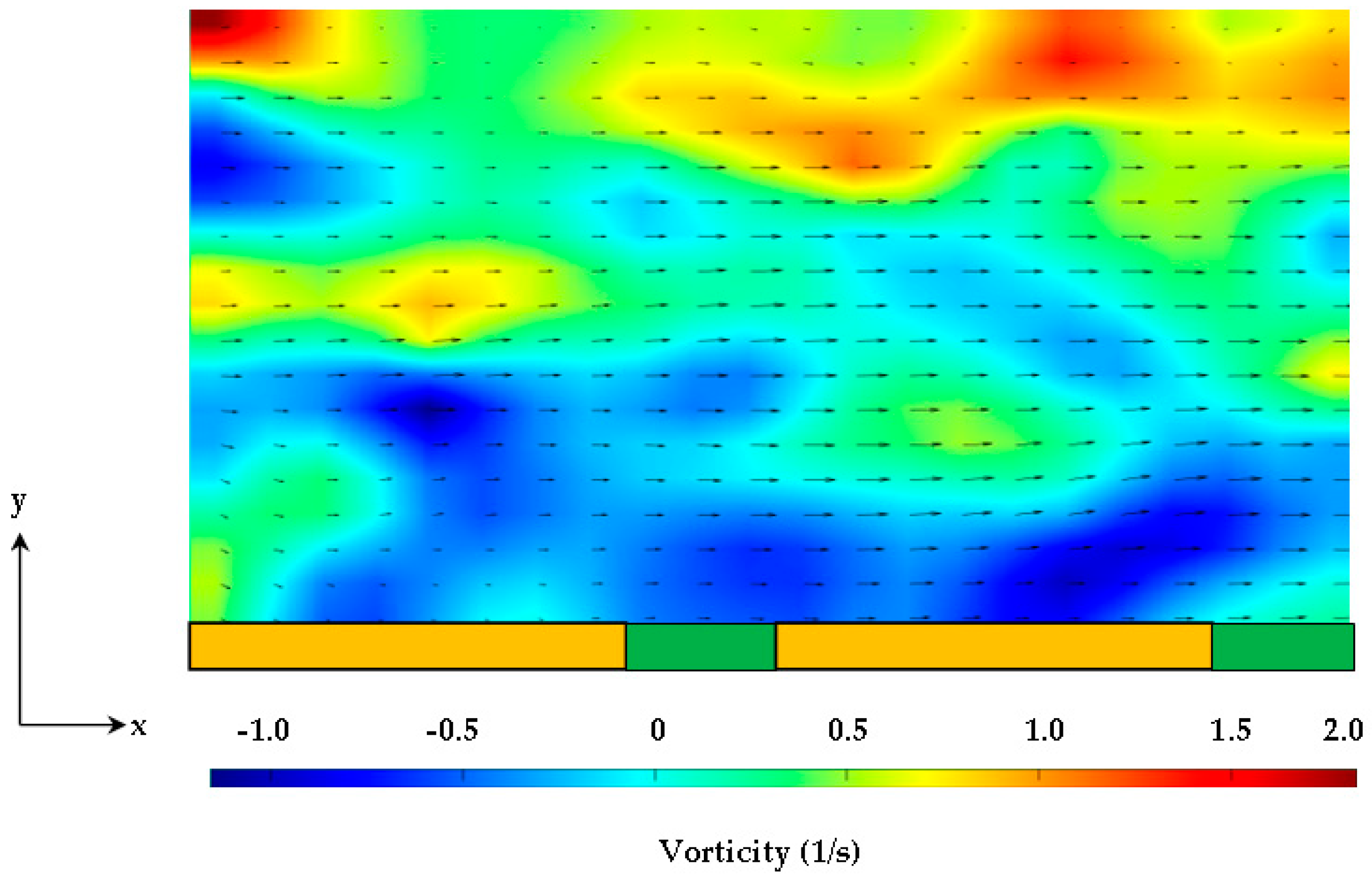
- A method for measuring the surrounding fluid and particle velocity, vorticity, and characterizing particle dynamics in the developed ferrofluid.
2. Materials and Methods
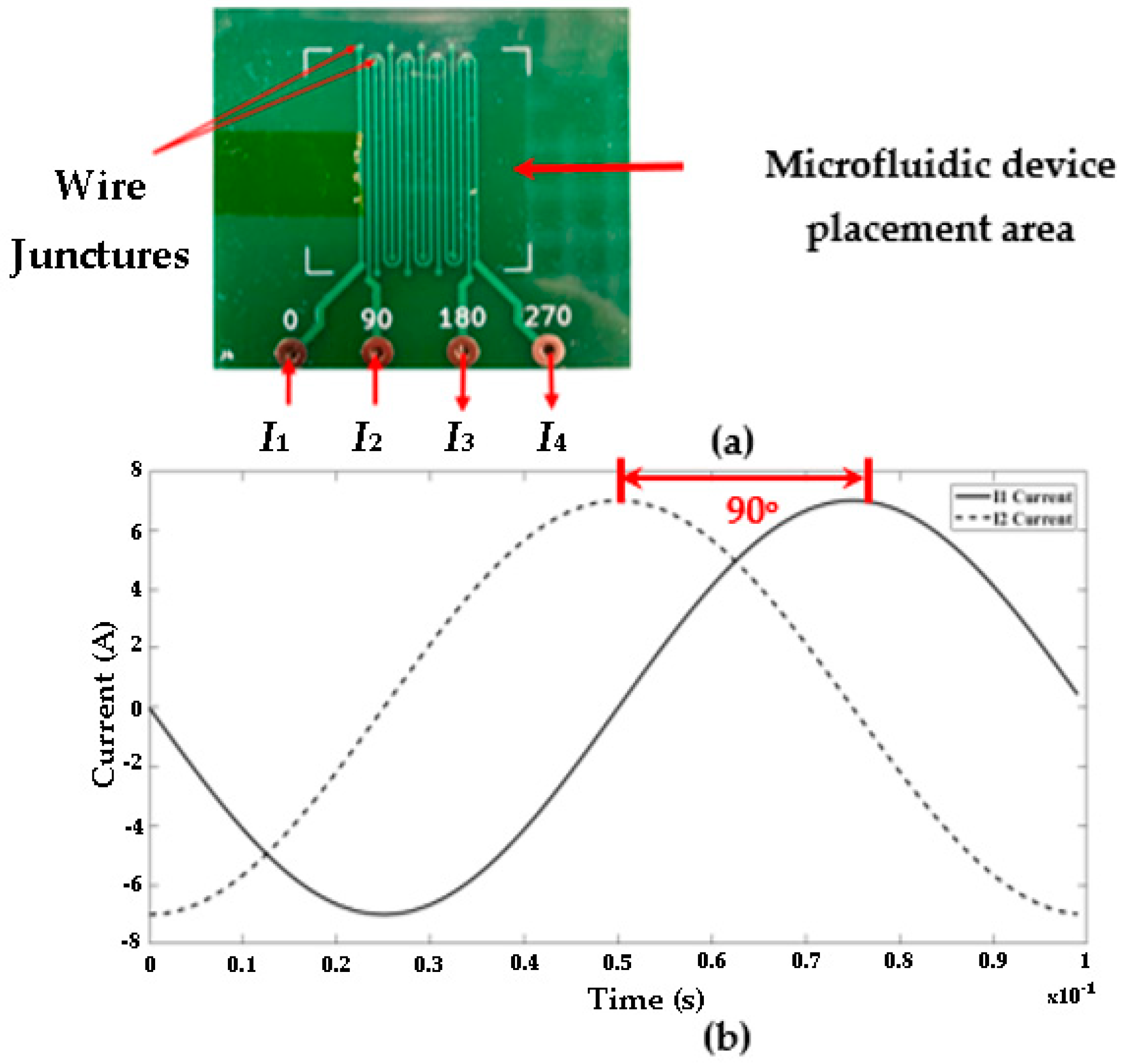
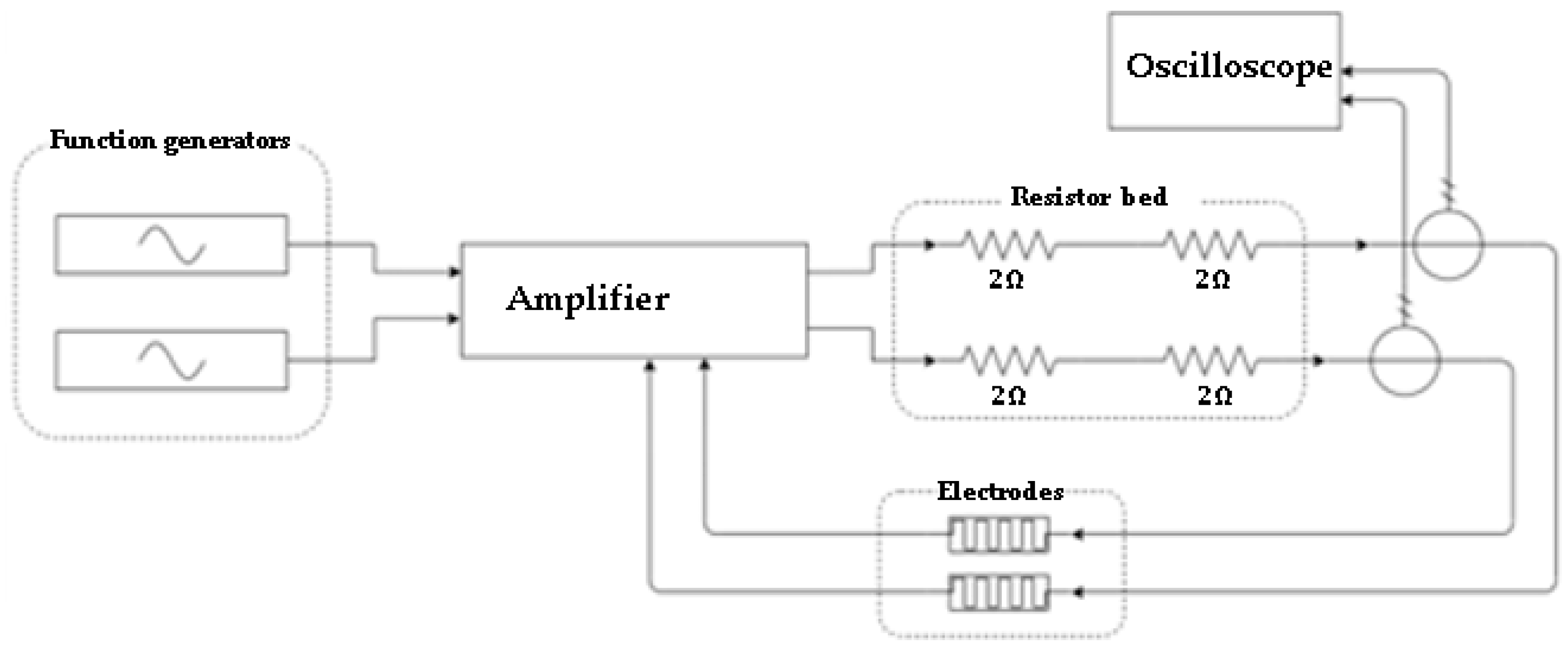
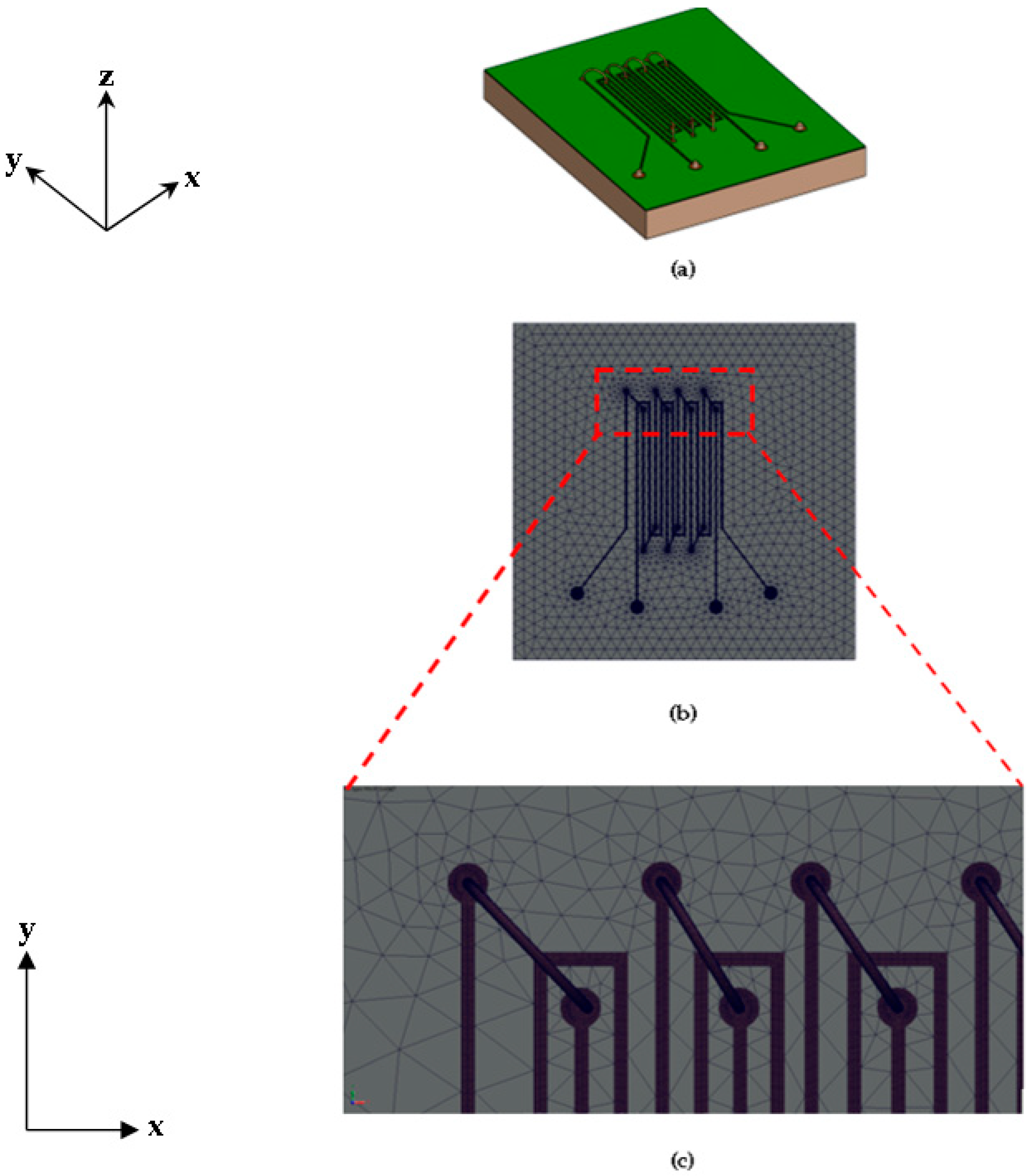
2.1. Device Development and Assembly Methodology
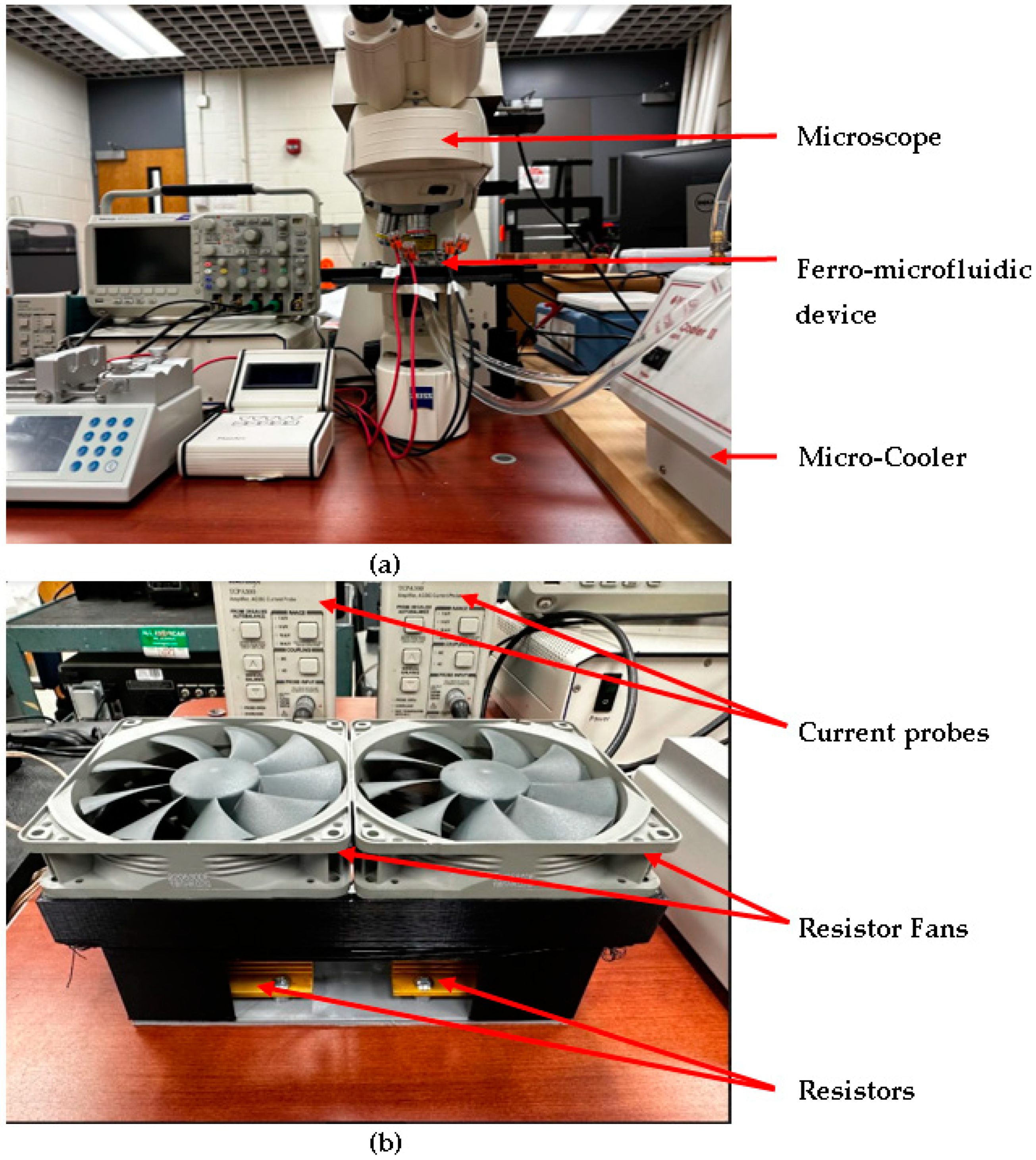
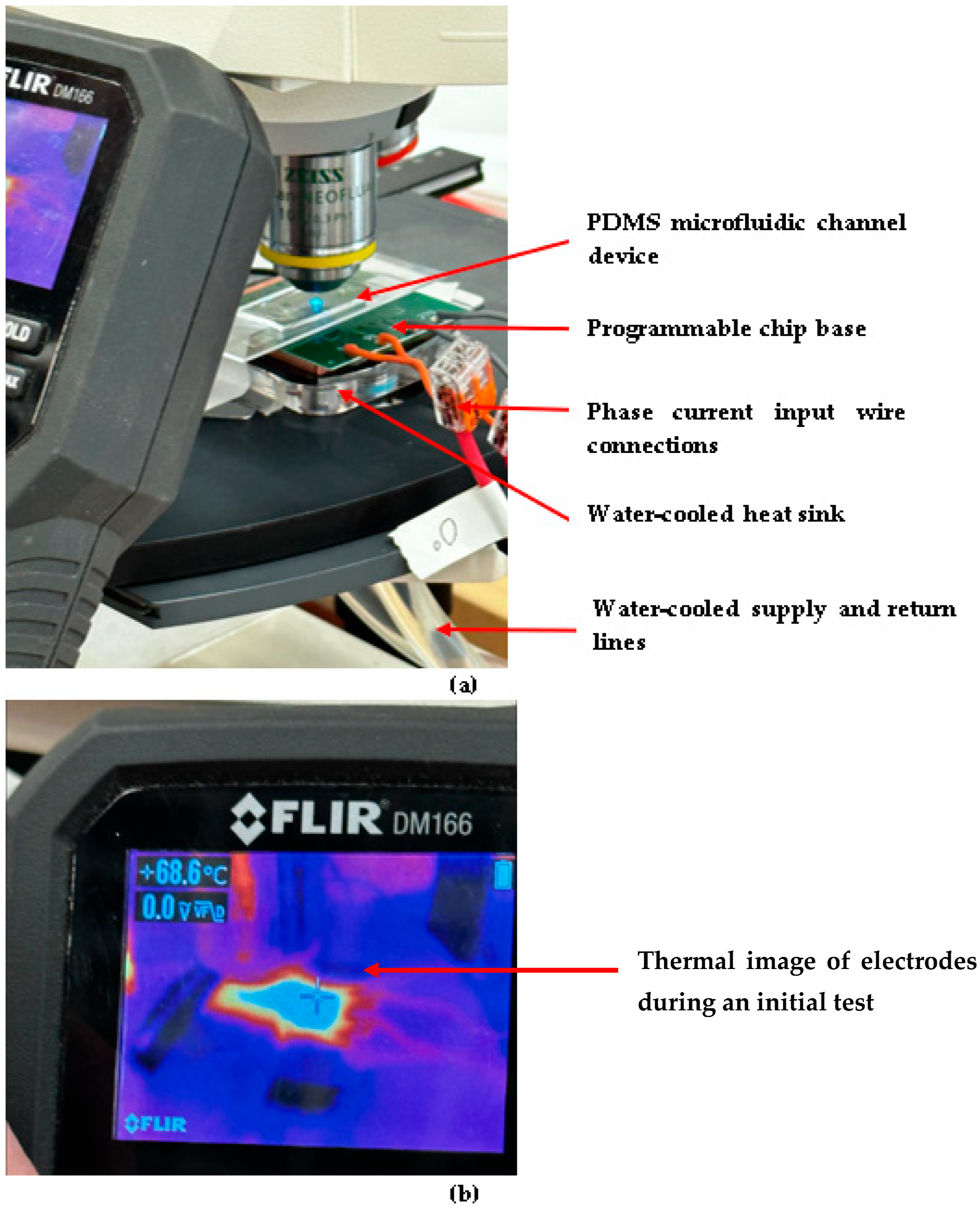
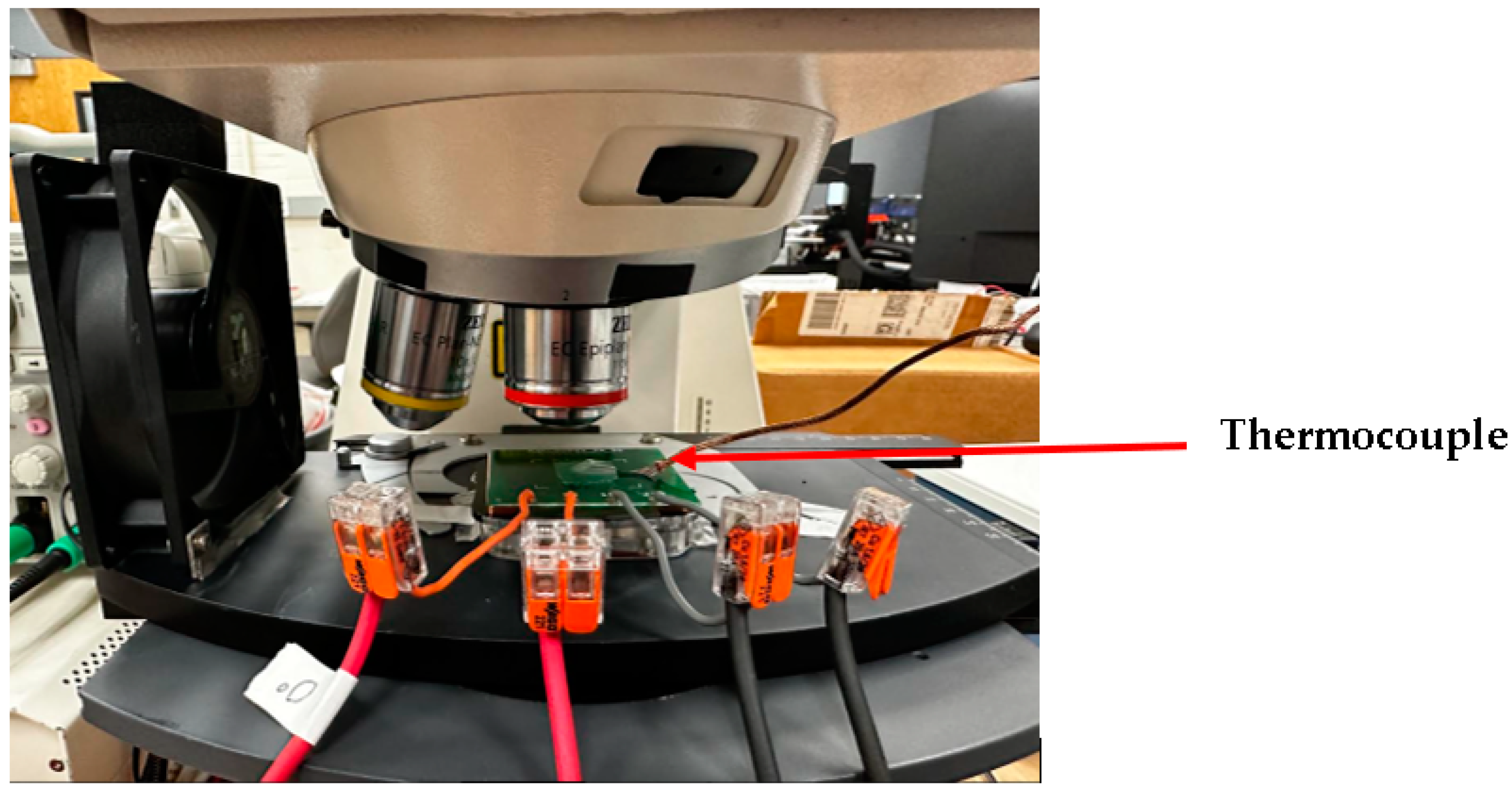
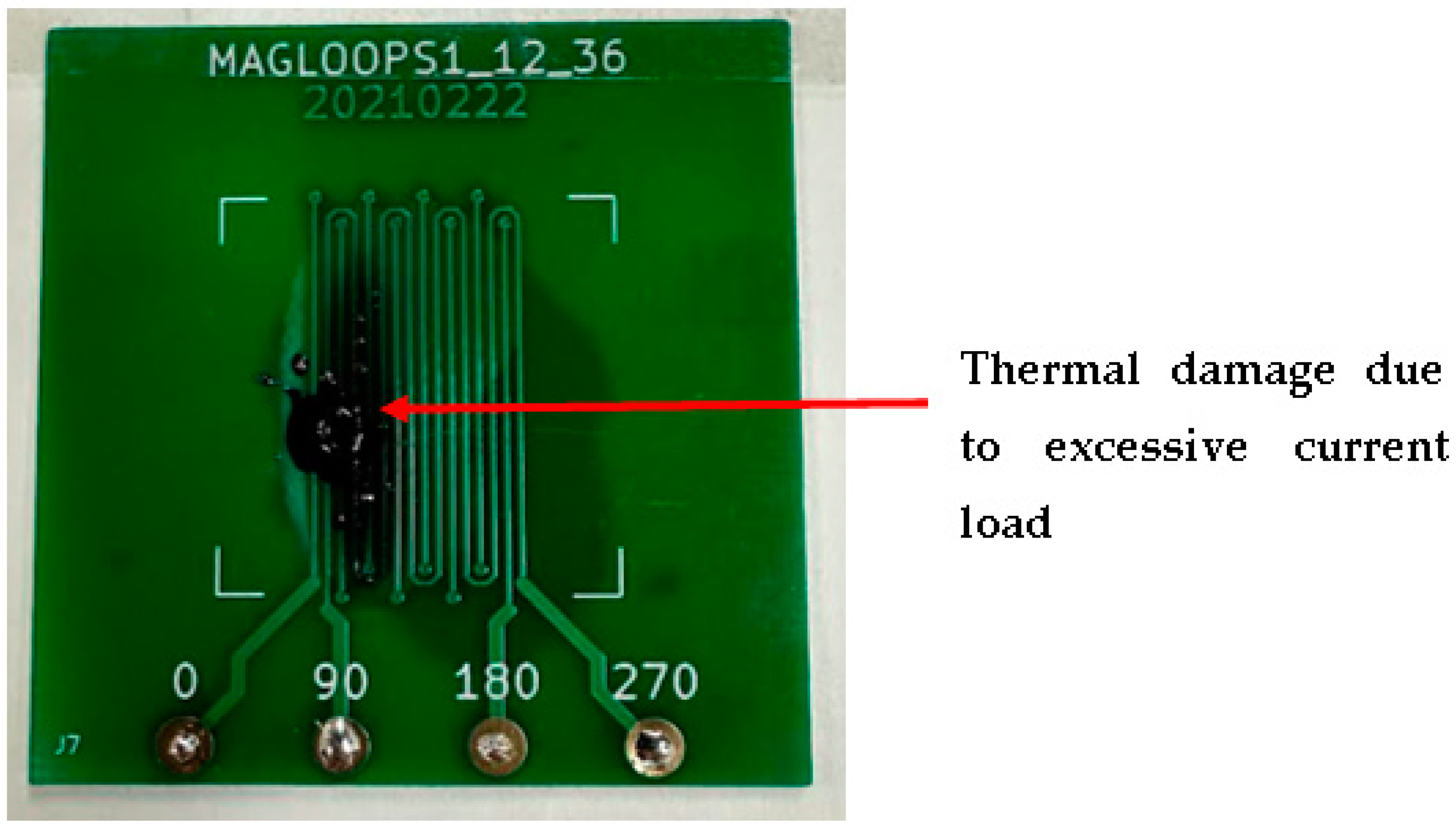
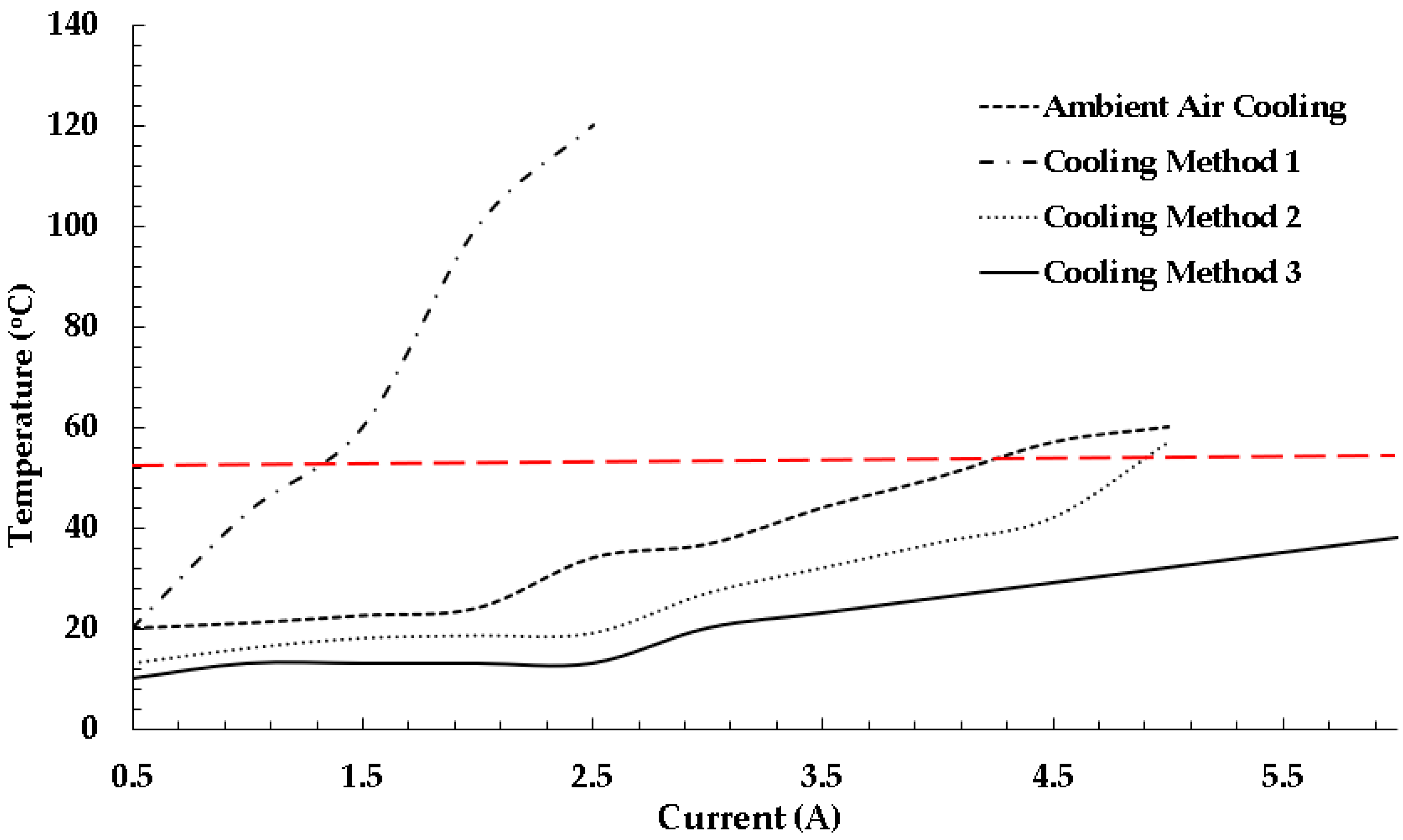
2.2. Heat Dissipation System Design, Development and Evaluation Methodology
2.3. Ferrofluid Tailoring and Ferro-Microfluidic Device Preparation
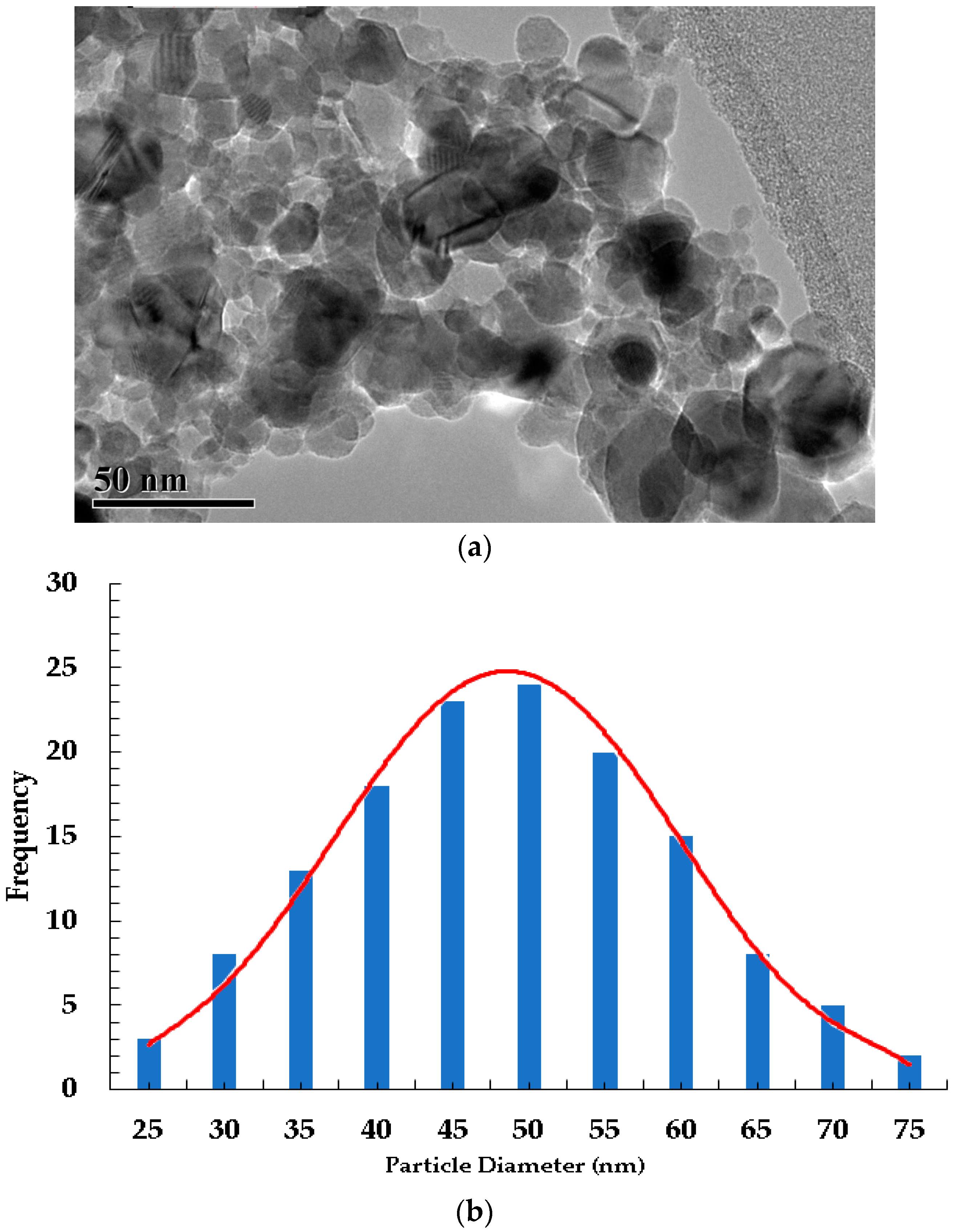
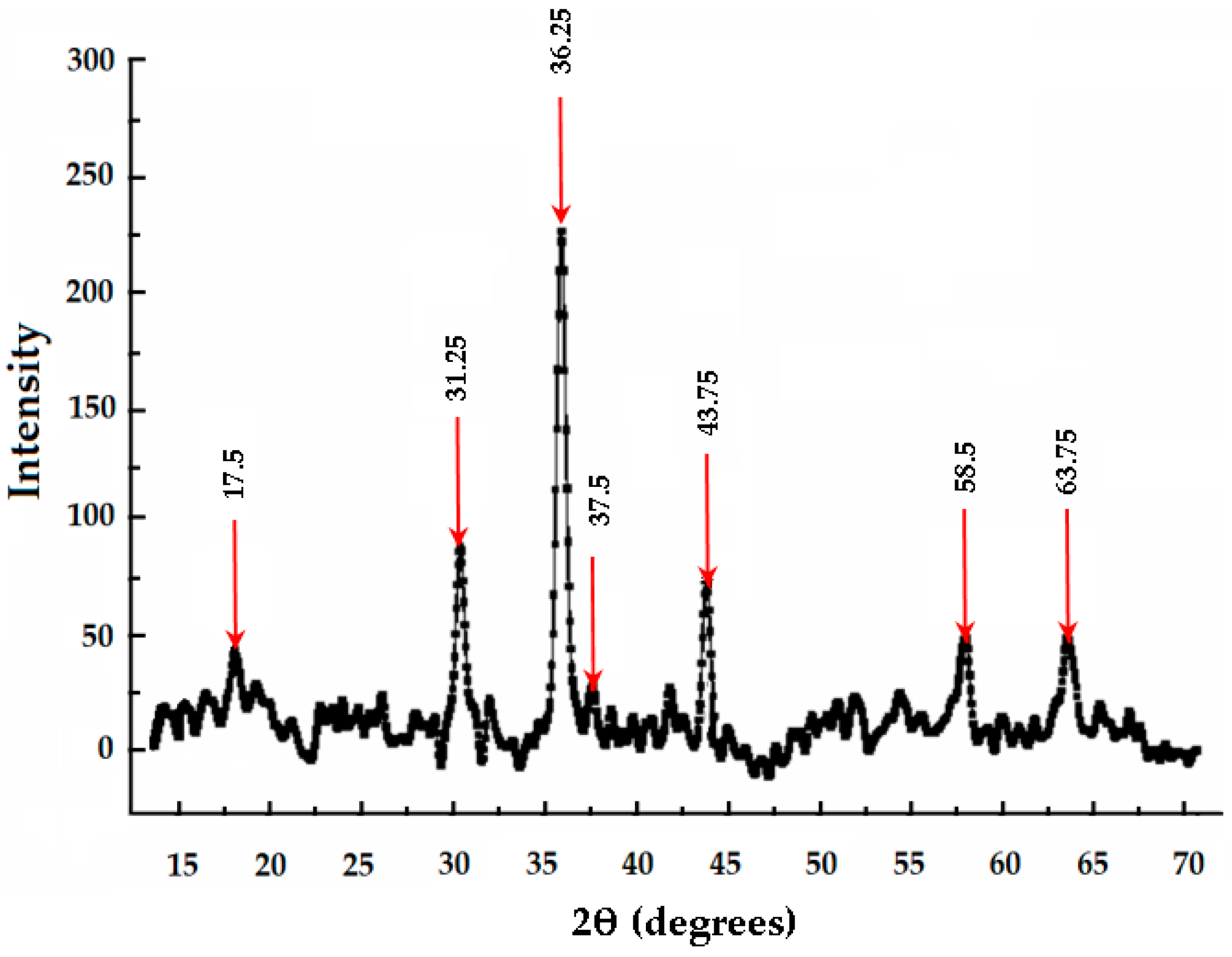
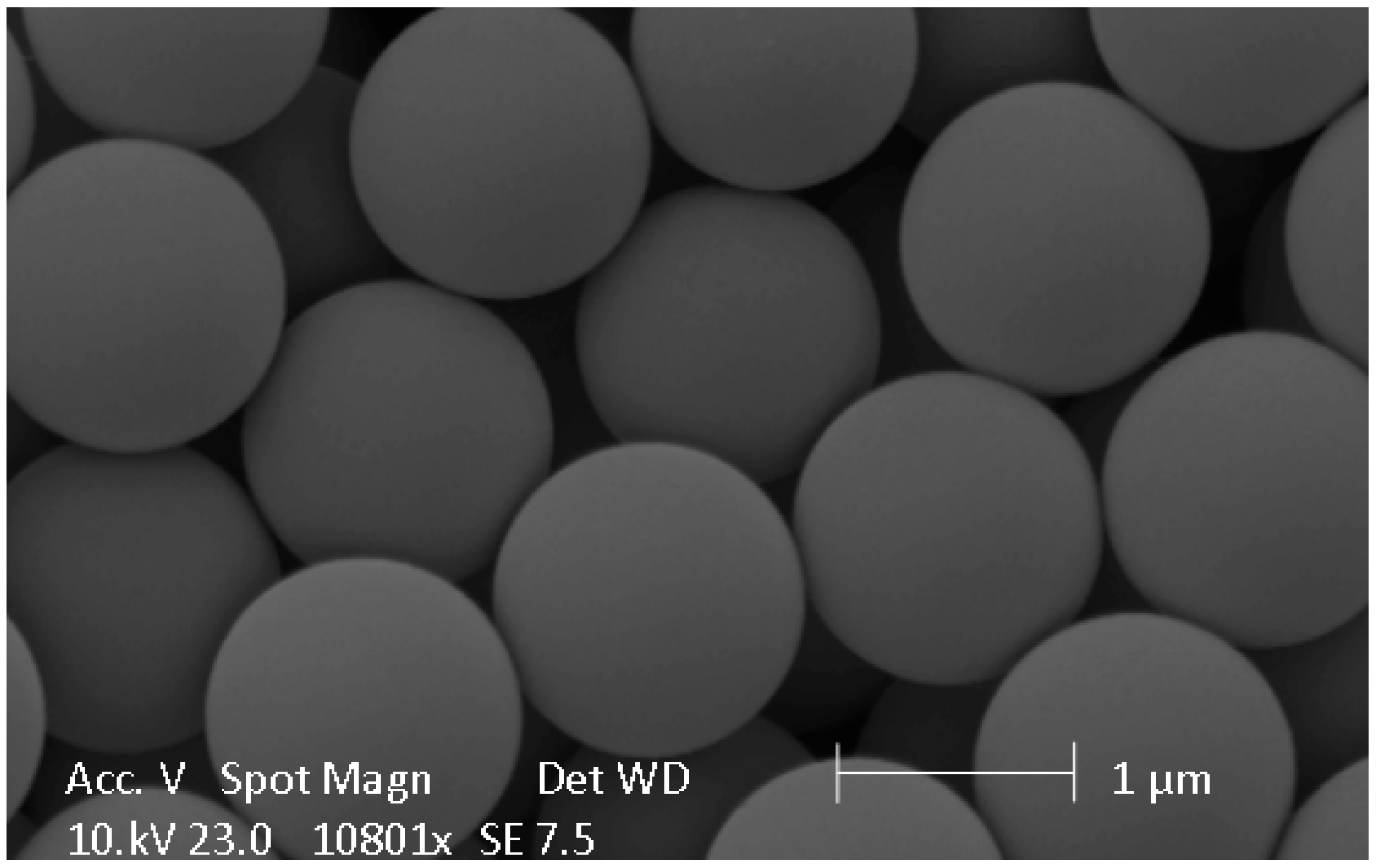
2.3.1. Cobalt Ferrite Microparticle Tailoring Process
3. Results
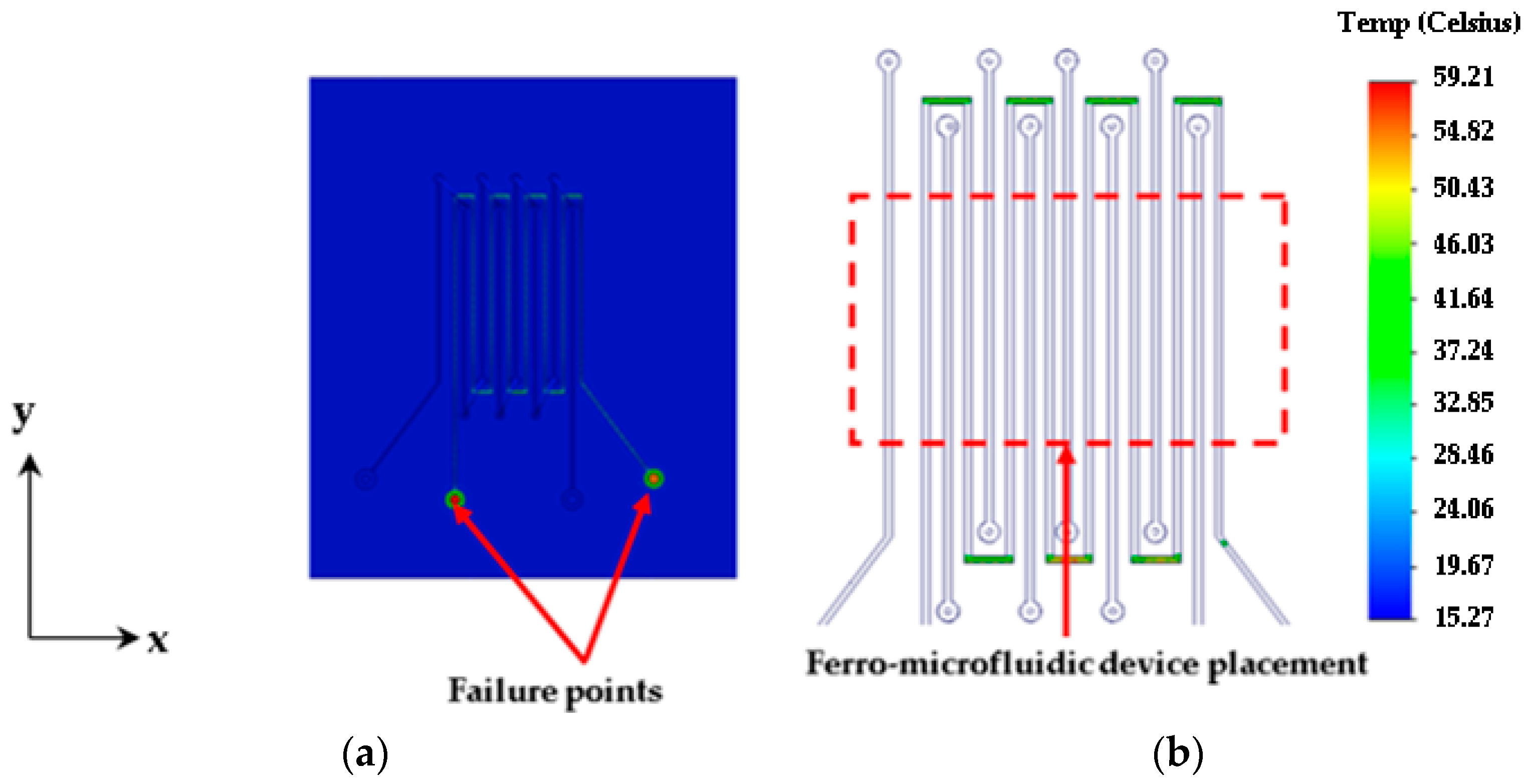
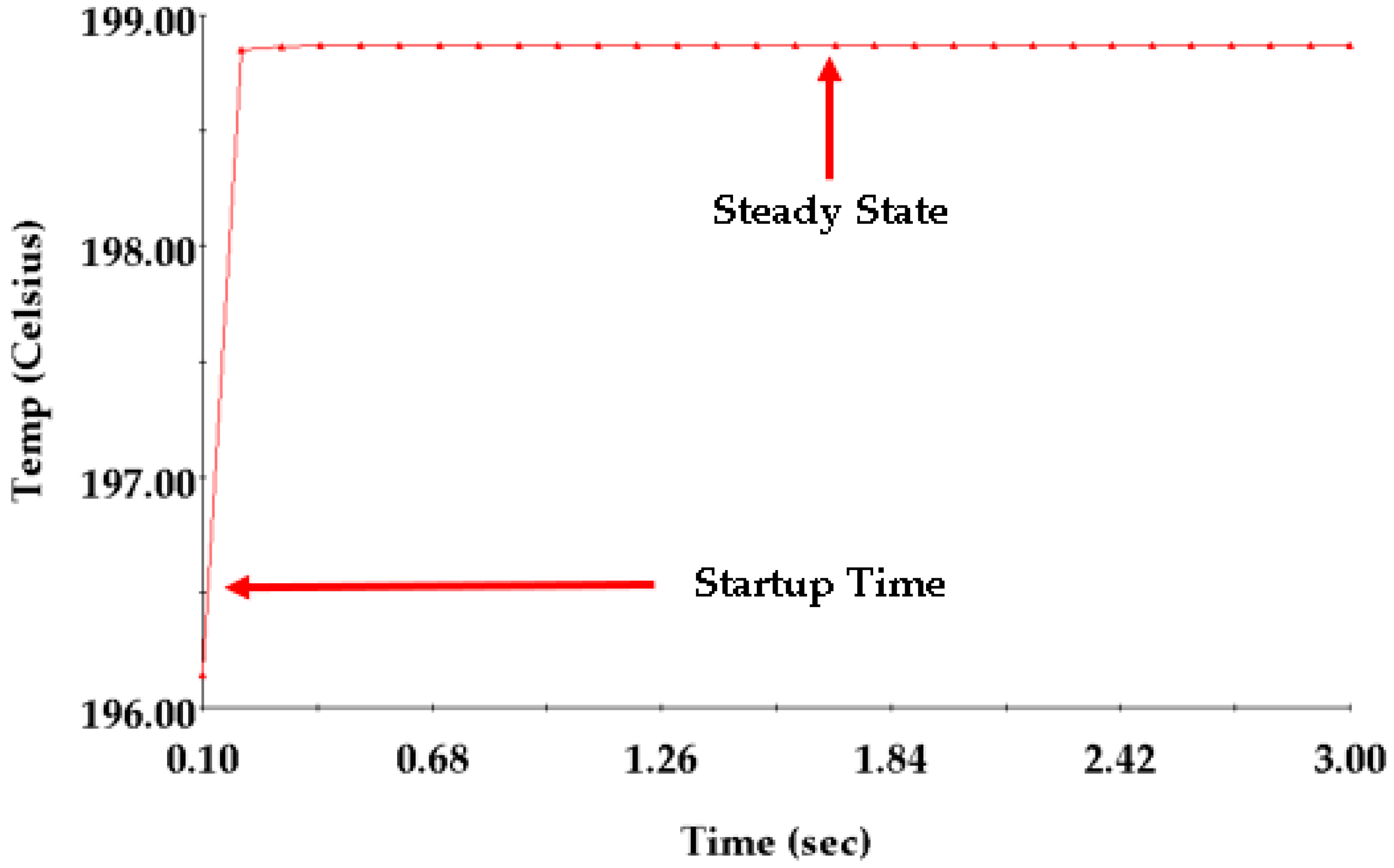
3.1. Heat Dissipation System Design Results
3.2. Cobalt Ferrite Particle Synthesizing and Ferrofluid Tailoring Results
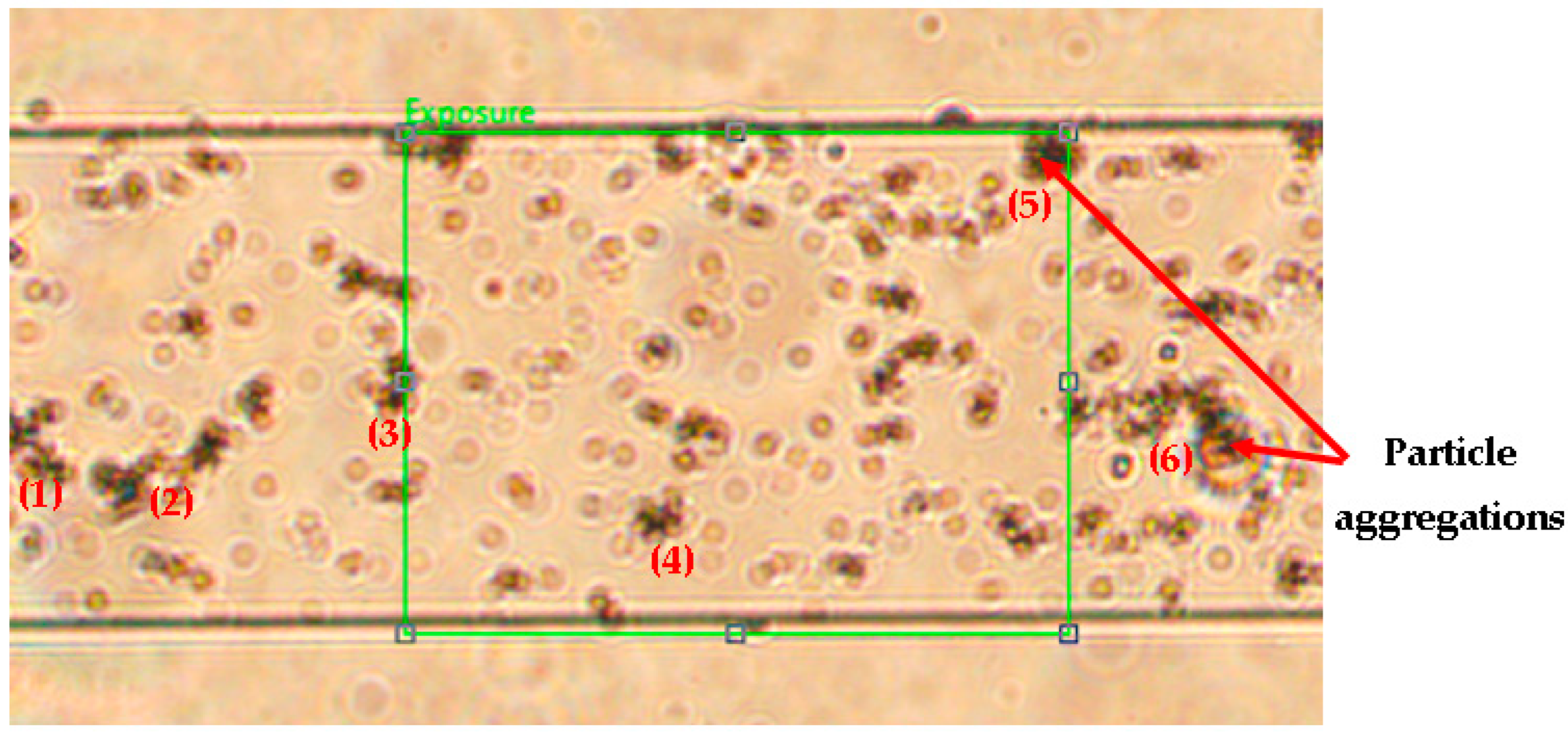
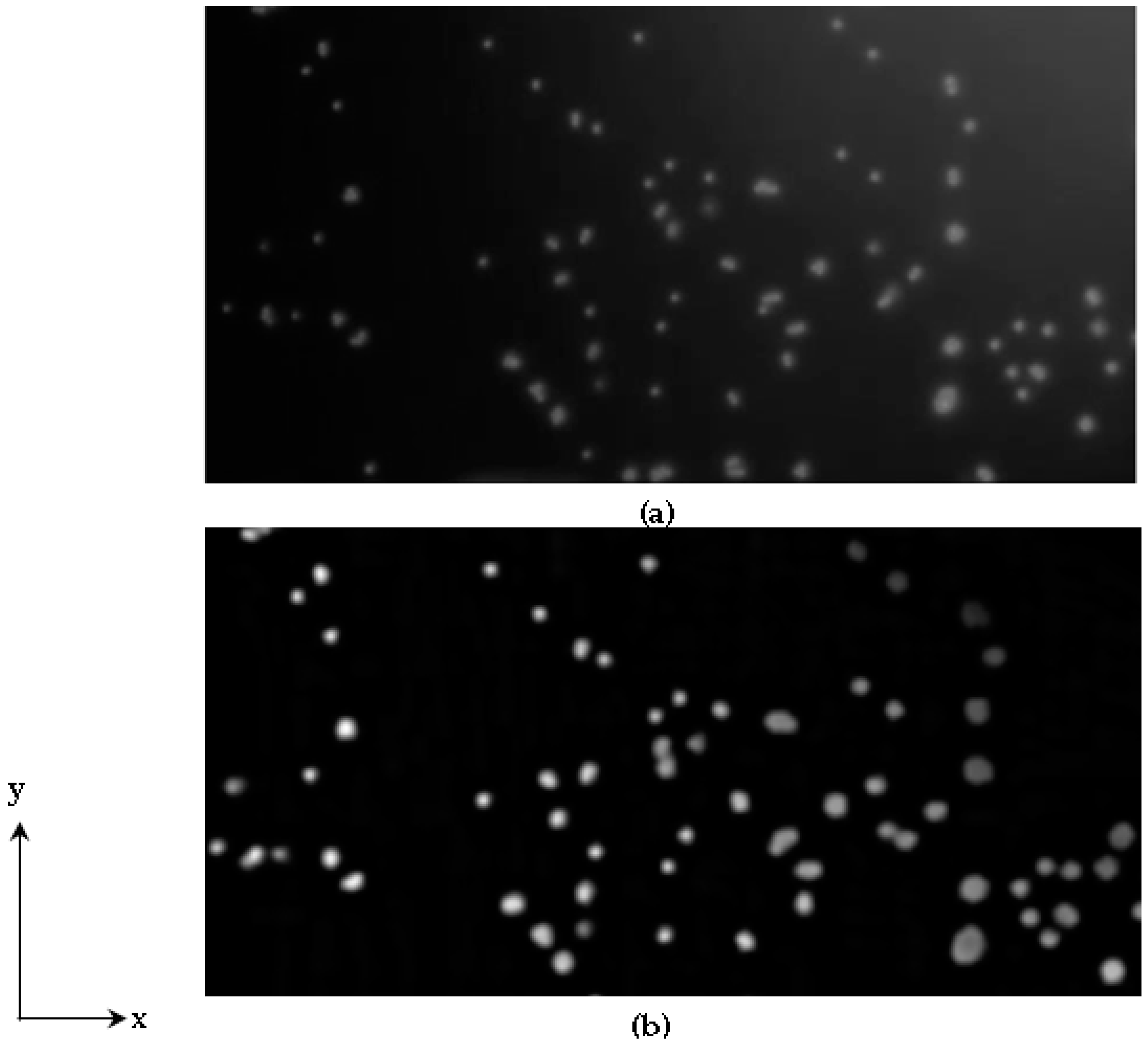
3.3. Particle Dynamic Characterization Studies
3.3.1. Large Electrode Spacing Study Results
3.3.2. Small Electrode Spacing Study Results
4. Conclusions
- A method for tailoring preferred size range (10–20 nm) magnetic cobalt ferrite magnetic nanoparticles.
- The development of a ferro-microfluidic device for potentially separating cells and magnetic microparticles without detrimental thermal effects.
- The development of a water-based ferrofluid with magnetic and non-magnetic particles as surrogates for biological cells.
- The design and development of a rig for producing the electric field within the ferro-micro fluidic device for magnetizing the magnetic nanoparticles and manipulating nanoparticles in static and dynamic flow while efficiently removing heat from the electrode base.
- A method for measuring the surrounding fluid and particle velocity, vorticity, and characterizing particle dynamics in the developed ferrofluid.
- An approach for separating magnetic and non-magnetic nanoparticles that could potentially be an advantage is that particle manipulation will not rely on labeling or surface modification, significantly reducing operation time and cost compared to conventional approaches.
- Using a particle tracking code for particle dynamics studies as opposed to a cross-correlation methodology.
- Refining the chip base design to incorporate thicker copper electrodes (in the direction of the thickness of the PCB) for smaller resistance in the electrodes. This would possibly result in less heat for any given excitation current.
- Investigate different metallic electrode core materials to provide a more effective path for heat to flow away from the magnetic excitation pattern.
- Develop different electrode patterns (square and curved) with varying sizes on one chip to characterize the behavior of particles under varying amperage and frequency conditions for both static and dynamic flow. Conducting further studies using this approach will allow us to establish the feasibility of this approach for potentially separating cells.
- Conduct particle dynamic characterization studies using commercial ferrofluids such as EMG 700 with varying electrode patterns, amperage settings, frequency settings, and non-magnetic particle sizes for both static and dynamic flow.
- Tailor biocompatible ferrofluids and conduct cellular-based studies such as separating bacteria from magnetic particles in dynamic flow studies.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Nabovati, G.; Ghafar-Zadeh, E.; Letourneau, A.; Sawan, M. Towards High Throughput Cell Growth Screening: A New CMOS 8 × 8 Biosensor Array for Life Science Applications. IEEE Trans. Biomed. Circuits Syst. 2016, 11, 380–391. [Google Scholar] [CrossRef] [PubMed]
- Azizipour, N.; Avazpour, R.; Rosenzweig, D.H.; Sawan, M.; Ajji, A. Evolution of Biochip Technology: A Review from Lab-on-a-Chip to Or-gan-on-a-Chip. Micromachines 2020, 11, 599. [Google Scholar] [CrossRef] [PubMed]
- Gimsa, J.; Marszalek, P.; Loewe, U.; Tsong, T. Dielectrophoresis and electrorotation of neurospora slime and murine myeloma cells. Biophys. J. 1991, 60, 749–760. [Google Scholar] [CrossRef] [PubMed]
- Dielectrophoresis, H.P. The Behavior of Neutral Matter in Non-Uniform Electric Field; Cambridge University Press: Cambridge, UK, 1978. [Google Scholar]
- Pommer, M.S.; Zhang, Y.; Keerthi, N.; Chen, D.; Thomson, J.A.; Meinhart, C.D.; Soh, H.T. Dielectrophoretic separation of platelets from diluted whole blood in microfluidic channels. Electrophoresis 2008, 29, 1213–1218. [Google Scholar] [CrossRef]
- Lorenz, M.; Malangré, D.; Du, F.; Baune, M.; Thöming, J.; Pesch, G.R. High-Throughput Dielectrophoretic Filtration of Sub-micron and Micro Particles in Mac-roscopic Porous Materials. Anal. Bioanal. Chem. 2020, 412, 3903–3914. [Google Scholar] [CrossRef]
- Hewlin, R.L., Jr.; Edwards, M. Continuous Flow Separation of Red Blood Cells and Platelets in a Y-Microfluidic Channel Device with Saw-Tooth Profile Elec-trodes via Low Voltage Dielectrophoresis. Curr. Issues Mol. Biol. 2023, 45, 3048–3067. [Google Scholar] [CrossRef]
- Menachery, A.; Pethig, P. Controlling Cell Destruction Using Dielectrophoretic Forces. NanoBiotechnology 2005, 152, 145–149. [Google Scholar] [CrossRef]
- Muller, T.; Pfennig, A.; Klein, P.; Gradl, G.; Jager, M.; Schnelle, T. The Potential of Dielectrophoresis for Single-Cell Experiments. IEEE Eng. Biol. Med. Mag. 2003, 22, 51–61. [Google Scholar] [CrossRef]
- Sebastian, A.; Buckle, A.M.; Markx, G.H. Formation of Multilayer Aggrefates of Mammalian Cells by Dielectrophoresis. J. Micromech. Microeng. 2006, 16, 1769–1777. [Google Scholar] [CrossRef]
- Sutermaster, B.A.; Darling, E.M. Considerations for High-Yield, High-Throughput Cell Enrichment: Fluorescence versus Magnetic Sorting. Sci. Rep. 2019, 9, 227. [Google Scholar] [CrossRef]
- Shamloo, A.; Naghdloo, A.; Besanjideh, M. Cancer Cell Enrichment on a Centrifugal Microfluidic Platform Using Hydrody-namic and Magnetophoretic Techniques. Sci. Rep. 2021, 11, 1939. [Google Scholar] [CrossRef] [PubMed]
- Liu, Y.; Zhao, W.; Cheng, R.; Harris, B.N.; Murrow, J.R.; Hodgson, J.; Egan, M.; Bankey, A.; Nikolinakos, P.G.; Laver, T.; et al. Fundamentals of Integrated Ferrohydrodynamic Cell Separation in Circulating Tumor Cell Isolation. Lab Chip 2021, 21, 1706–1723. [Google Scholar] [CrossRef] [PubMed]
- Liu, Y.; Vieira, R.M.S.; Mao, L. Simultaneous and Multimodal Antigen-Binding Profiling and Isolation of Rare Cells via Quan-titative Ferrohydrodynamic Cell Separation. ACS Nano 2023, 17, 94–110. [Google Scholar] [CrossRef] [PubMed]
- Gijs, M.A.M. Magnetic bead handling on-chip: New opportunities for analytical applications. Microfluid. Nanofluidics 2004, 1, 22–40. [Google Scholar] [CrossRef]
- Pandey, S.; Mehendale, N.; Paul, D. Single-Cell Separation. In Handbook of Single Cell Technologies; Santra, T.S., Tseng, F.G., Eds.; Springer: Singapore, 2022. [Google Scholar]
- Lu, N.; Tay, H.M.; Petchakup, C.; He, L.; Gong, L.; Maw, K.K.; Leong, S.Y.; Lok, W.W.; Ong, H.B.; Guo, R.; et al. Label-free microfluidic cell sorting and detection for rapid blood analysis. Lab Chip 2023, 23, 1226. [Google Scholar] [CrossRef]
- Davis, J.A.; Inglis, D.W.; Morton, K.J.; Lawrence, D.A.; Huang, L.R.; Chou, S.Y.; Sturm, J.C.; Austin, R.H. Deterministic Hydrodyanmics: Taking Blood Apart. Proc. Natl. Acad. Sci. USA 2006, 103, 14779–14784. [Google Scholar] [CrossRef]
- Kose, A.R.; Fischer, B.; Mao, L.; Koser, H. Label-free cellular manipulation and sorting via biocompatible ferrofluids. Proc. Natl. Acad. Sci. USA 2009, 106, 21478–21483. [Google Scholar] [CrossRef]
- Kose, A.R.; Koser, H. Ferrofluid mediated nanocytometry. Lab Chip 2011, 12, 190–196. [Google Scholar] [CrossRef]
- Zhao, W.; Zhu, T.; Cheng, R.; Liu, Y.; He, J.; Qiu, H.; Wang, L.; Nagy, T.; Querec, T.D.; Unger, E.R.; et al. Label-Free and Continuous-Flow Ferrohydrodynamic Separation of HeLa Cells and Blood Cells in Biocompatible Ferrofluids. Adv. Funct. Mater. 2015, 26, 3990–3998. [Google Scholar] [CrossRef]
- Xuan, X. Recent Advances in Continuous-Flow Particle Manipulations Using Magnetic Fluids. Micromachines 2019, 10, 744. [Google Scholar] [CrossRef]
- Kashevsky, B.E. Nonmagnetic particles in magnetic fluid: Reversal dynamics under rotating field. Phys. Fluids 1997, 9, 1811–1818. [Google Scholar] [CrossRef]
- Rosensweig, R.E. Ferrohydrodynamics; Dover: New York, NY, USA, 1997. [Google Scholar]
- Odenback, S. Magnetically Controllable Fluids and Their Applications; Springer: New York, NY, USA, 2002. [Google Scholar]
- Edwards, M.; Hewlin, R.L., Jr. A Computational Model for Analysis of Field and Force and Particle Dynamics in a Ferro-Magnetic Microfluidic System. In Proceedings of the ASME 2022 International Mechanical Engineering Congress and Exposition, Columbus, OH, USA, 30 October–3 November 2022; Volume 4: Biomedical and Biotechnology; Design, Systems, and Complexity; V004T05A007. ASME: New York, NY, USA, 2022. [Google Scholar] [CrossRef]
- Edwards, M.; Hewlin, R.L., Jr.; Smith, M. A 2-D Transient Computational Multi-Physics Model for Analyzing Magnetic and Non-Magnetic (Red Blood Cells and E. Coli Bacteria) Particle Dynamics in a Travelling Wave Ferro-Magnetic Microfluidic Device. ASME J. Eng. Sci. Med. Ther. Diagn. 2023; paper accepted. [Google Scholar]
- Yellen, B.B.; Hovorka, O.; Friedman, G. Arranging matter by magnetic nanoparticle assemblers. Proc. Natl. Acad. Sci. USA 2005, 102, 8860–8864. [Google Scholar] [CrossRef] [PubMed]
- Yellen, B.B.; Erb, R.M.; Son, H.S.; Hewlin, R., Jr.; Shang, H.; Lee, G.U. Travelling Wave Magnetophoresis for High Resolution Chip Based Sepa-rations. Lab Chip 2007, 7, 1681–1688. [Google Scholar] [CrossRef] [PubMed]
- Stanley, N.; Ciero, A.; Timms, W.; Hewlin, J.R.L. A 3-D Printed Optically Clear Rigid Diseased Carotid Bifurcation Arterial Mock Vessel Model for Particle Image Velocimetry Analysis in Pulsatile Flow. ASME Open J. Eng. 2023, 2. [Google Scholar] [CrossRef]
- Crooks, J.M.; Hewlin, R.L., Jr.; Williams, W.B. Computational Design Analysis of a Hydrokinetic Horizontal Parallel Stream Direct Drive Counter-Rotating Darrieus Turbine System: A Phase One Design Analysis Study. Energies 2022, 15, 8942. [Google Scholar] [CrossRef]
- Hewlin, R.L., Jr.; Kizito, J.P. Development of an Experimental and Digital Cardiovascular Arterial Model for Transient Hemo-dynamic and Postural Change Studies: A Preliminary Framework Analysis. Cardiovasc. Eng. Tech. 2018, 9, 1–31. [Google Scholar] [CrossRef]
- Hewlin, R.L., Jr. Transient Cardiovascular Hemodynamics in a Patient-Specific Arterial System. Ph.D. Thesis, North Carolina Agricultural and Technical State University, Greensboro, NC, USA, 2015. [Google Scholar]
- Stanley, N.; Ciero, A.; Timms, W.; Hewlin, R.L., Jr. Development of 3-D Printed Optically Clear Rigid Anatomical Vessels for Particle Image Velocimetry Analysis in Cardiovascular Flow. In Proceedings of the International Mechanical Engineering Conference & Exposition (IMECE), Salt Lake City, UT, USA, 11–14 November 2019. [Google Scholar] [CrossRef]
- Hewlin, R.L., Jr.; Kizito, J.P. Development of a Capacitance Based Void Fraction Sensor for Two-Phase Flow Measurement. In Proceedings of the ASME 2013 Fluids Engineering Division Summer Meeting, Incline Village, NV, USA, 7–11 July 2013; Volume 2, Fora: Cavitation and Multiphase Flow; Fluid Measurements and Instrumentation; Microfluidics; Multiphase Flows; Work in Progress. 2013. [Google Scholar]
- Hewlin, R.L., Jr. Development of Digital Diagnostics and Measurement Tools for a High Heat Flux Thermal Loop. Master’s Thesis, North Carolina Agricultural and Technical State University, Greensboro, NC, USA, 2010. [Google Scholar]
- Tung, L.D.; Kolesnichenko, V.; Caruntu, D.; Chou, N.H.; O’connor, C.J.; Spinu, L. Magnetic properties of ultrafine cobalt ferrite particles. J. Appl. Phys. 2003, 93, 7486–7488. [Google Scholar] [CrossRef]
- Hewlin, R.L., Jr.; Kizito, J.P. Comparison of Carotid Bifurcation Hemodynamics in Patient-Specific Geometries at Rest and During Exercise. In Proceedings of the ASME 2013 Fluids Engineering Division Summer Meeting, Incline Village, NV, 7–11 July 2013. [Google Scholar]
- Hewlin, R.L., Jr.; Kizito, J.P. Evaluation of the Effect of Simplified and Patient-Specific Arterial Geometry on Hemodynamic Flow in Stenosed Bifurcation Arteries. ASME Early Career Tech. J. 2011, 10, 39–44. [Google Scholar]
- Hewlin, R.L., Jr.; Tindall, J.M. Computational Assessment of Magnetic Nanoparticle Targeting Efficiency in a Simplified Circle of Willis Arterial Model. Int. J. Mol. Sci. 2023, 24, 2545. [Google Scholar] [CrossRef]




























Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hewlin, R.L., Jr.; Edwards, M.; Schultz, C. Design and Development of a Traveling Wave Ferro-Microfluidic Device and System Rig for Potential Magnetophoretic Cell Separation and Sorting in a Water-Based Ferrofluid. Micromachines 2023, 14, 889. https://doi.org/10.3390/mi14040889
Hewlin RL Jr., Edwards M, Schultz C. Design and Development of a Traveling Wave Ferro-Microfluidic Device and System Rig for Potential Magnetophoretic Cell Separation and Sorting in a Water-Based Ferrofluid. Micromachines. 2023; 14(4):889. https://doi.org/10.3390/mi14040889
Chicago/Turabian StyleHewlin, Rodward L., Jr., Maegan Edwards, and Christopher Schultz. 2023. "Design and Development of a Traveling Wave Ferro-Microfluidic Device and System Rig for Potential Magnetophoretic Cell Separation and Sorting in a Water-Based Ferrofluid" Micromachines 14, no. 4: 889. https://doi.org/10.3390/mi14040889
APA StyleHewlin, R. L., Jr., Edwards, M., & Schultz, C. (2023). Design and Development of a Traveling Wave Ferro-Microfluidic Device and System Rig for Potential Magnetophoretic Cell Separation and Sorting in a Water-Based Ferrofluid. Micromachines, 14(4), 889. https://doi.org/10.3390/mi14040889