
Development and Research of the Sensitive Element of the MEMS Gyroscope Manufactured Using SOI Technology

Abstract
:1. Introduction
- -
- There are many analogs with good characteristics, which indicates a successful design. The abundance of implemented designs also reduces the risks for development, which is very important when a guaranteed result is required in a specified time.
- -
- The studied mathematical apparatus simplifies both development and modeling. This also reduces the development time of the MEMS gyroscope.
- -
- There are existing scientific and technical foundations in the scientific groups of the Southern Federal University (Taganrog, Russia) for the development of linear-type vibration MEMS gyroscopes.
- -
- It offers the ability to work at atmospheric pressure.
- -
- It is a relatively simple and inexpensive manufacturing technology, with the possibility of further localization at enterprises.
- -
- There is a potential for further performance improvement by increasing the number of IMs, adding synchronizing elements, expanding the dynamic range, etc.
- -
- Ready-made application-specific integrated circuits (ASICs) are available.
2. Signal Processing Circuit
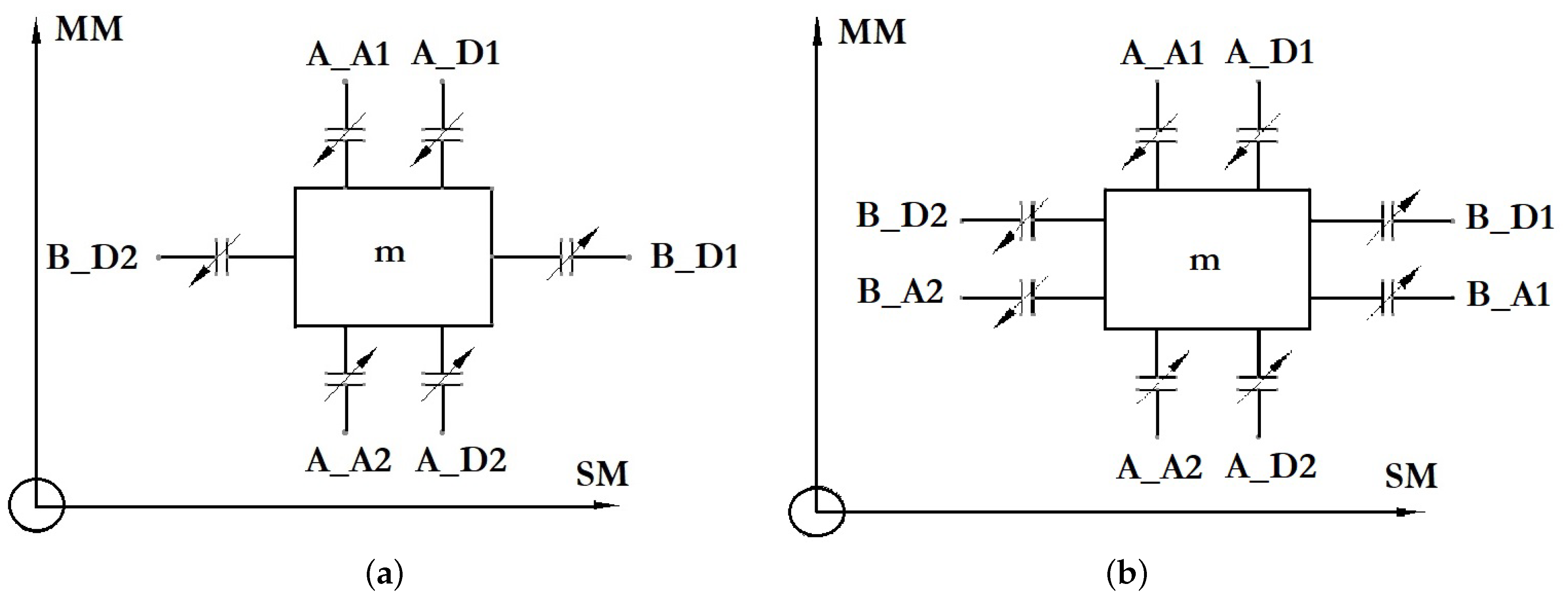
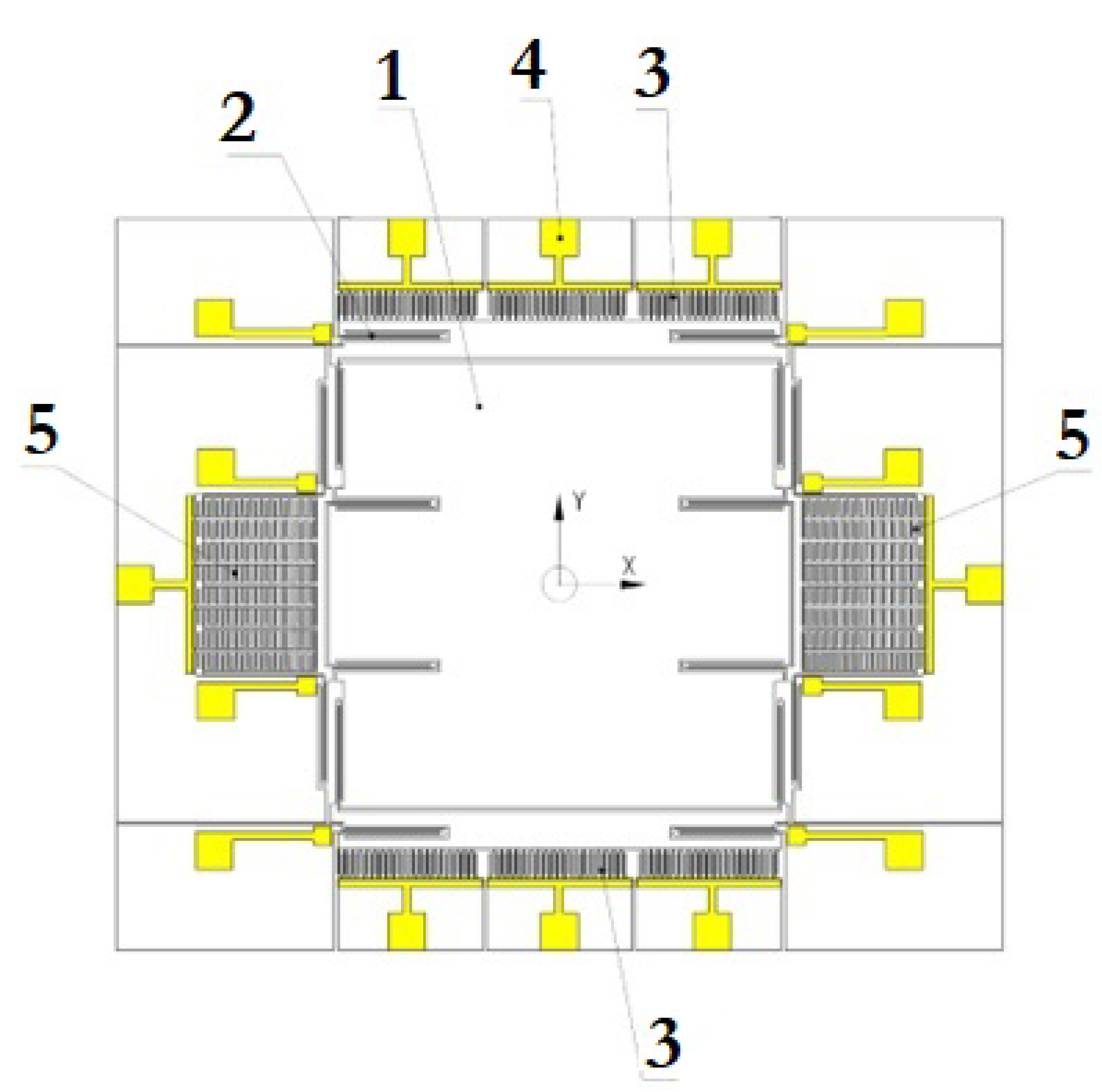
2.1. Scheme of Elastic Suspension of the SE
- -
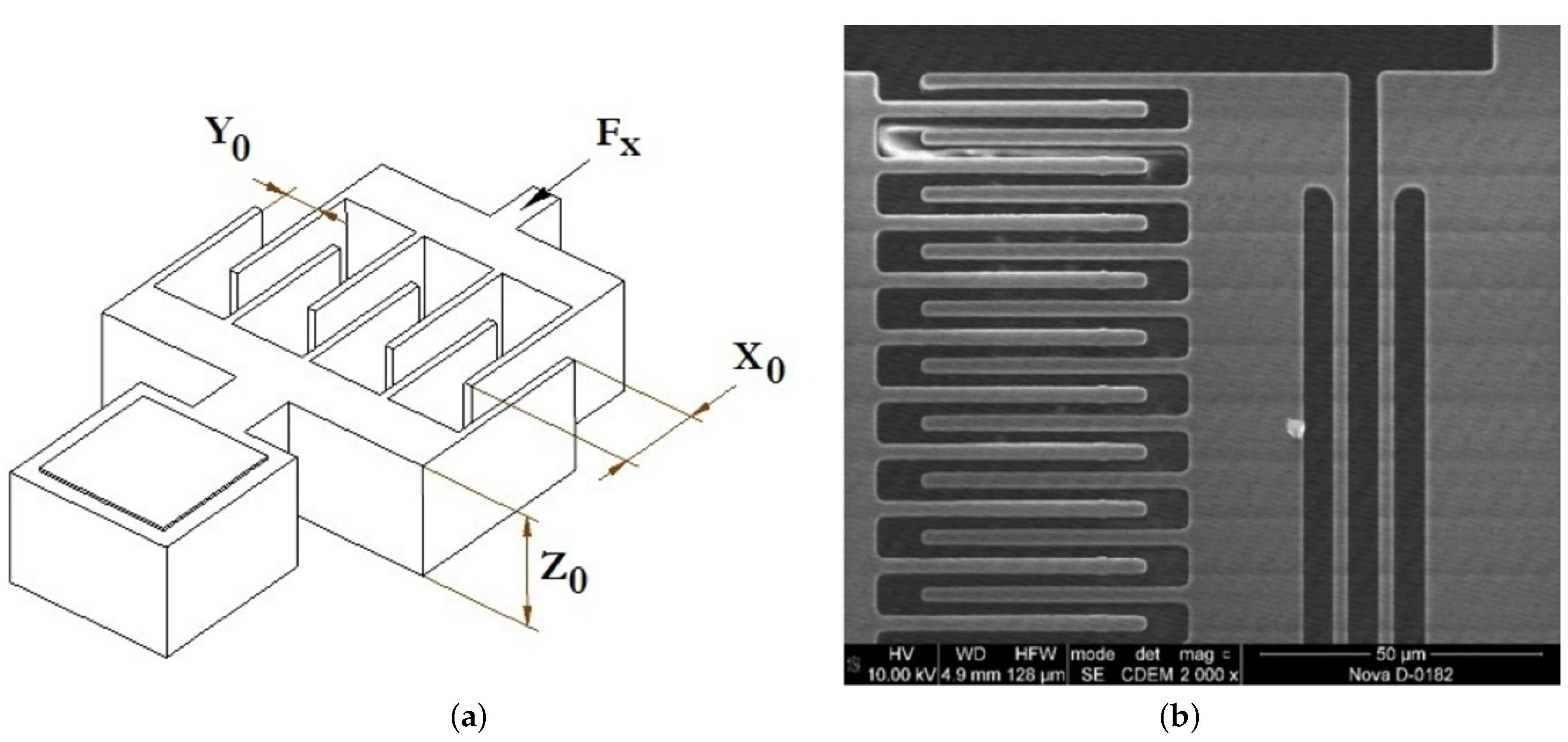
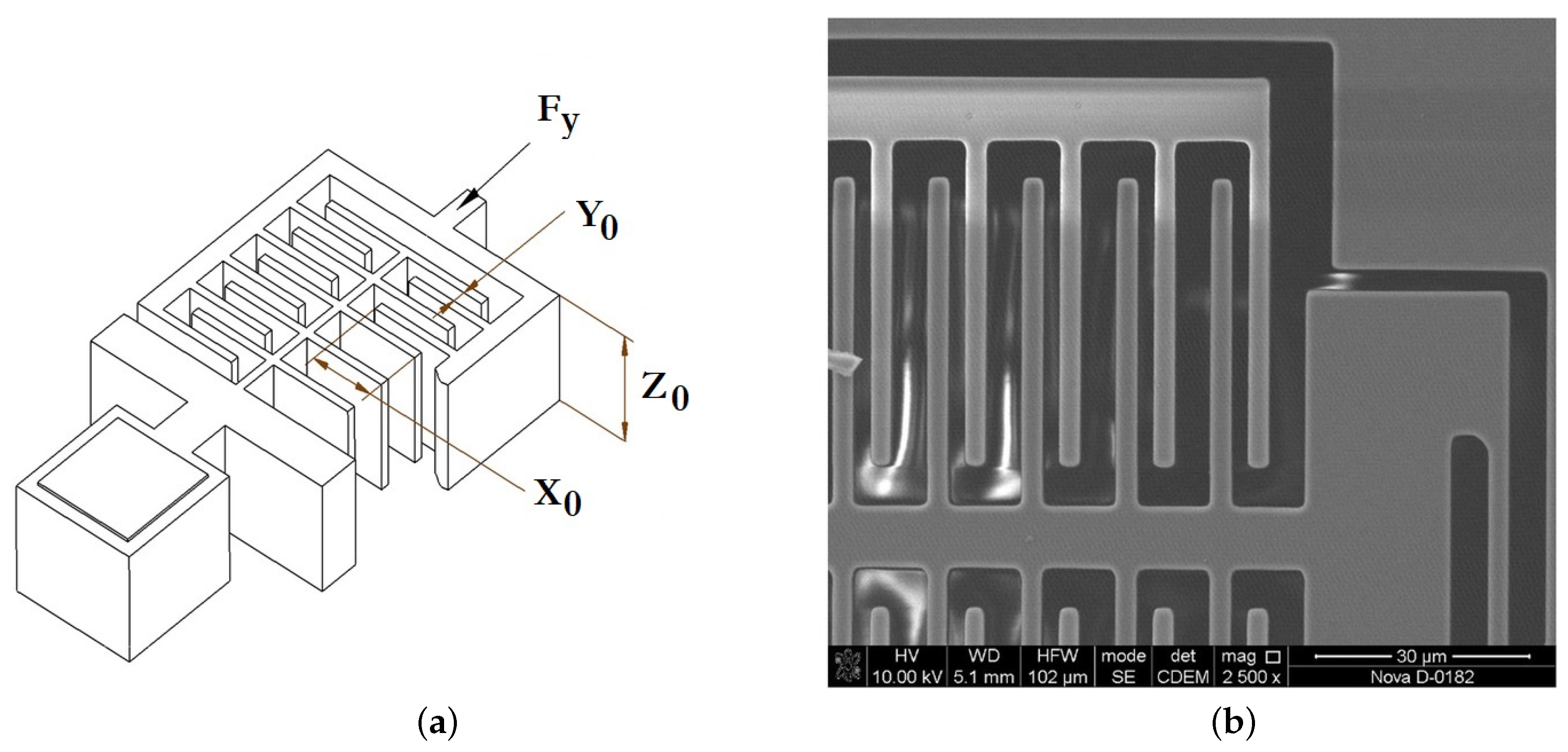
- When a sinusoidal signal is applied to the plates of the electrostatic drive under the influence of electrostatic forces in the gaps of the electrostatic vibration drive, the IM performs reciprocating movements in the direction of the X-axis.
- -
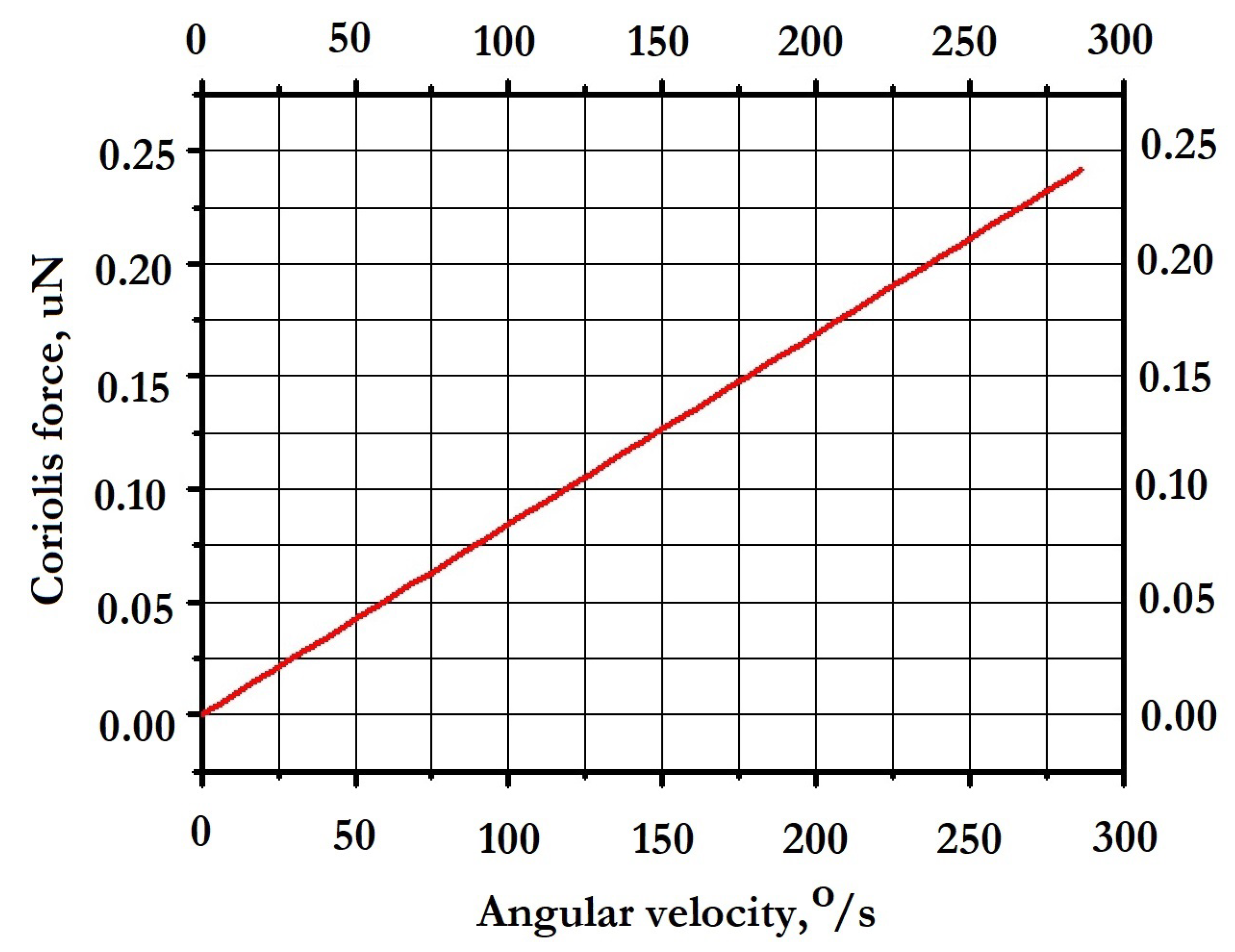
- When the base rotates with the angular velocity around the axis perpendicular to the plane of the IM, Coriolis forces of inertia arise, acting on the IM and directed along the Y-axis. The amplitude of the oscillations of the IM in the direction of the Y-axis is proportional to the measured angular velocity .
- -
- An electrical signal proportional to the amplitude of the IM oscillations is extracted from the capacitive displacement converter and then converted by an electronic signal processing circuit in the electronic unit.
- -
- The decoupling mechanism also minimizes the impact of manufacturing defects and the resulting anisoelasticity by using independent bends and limited moving electrodes in the excitation and reading modes.
2.2. The Electronic Part
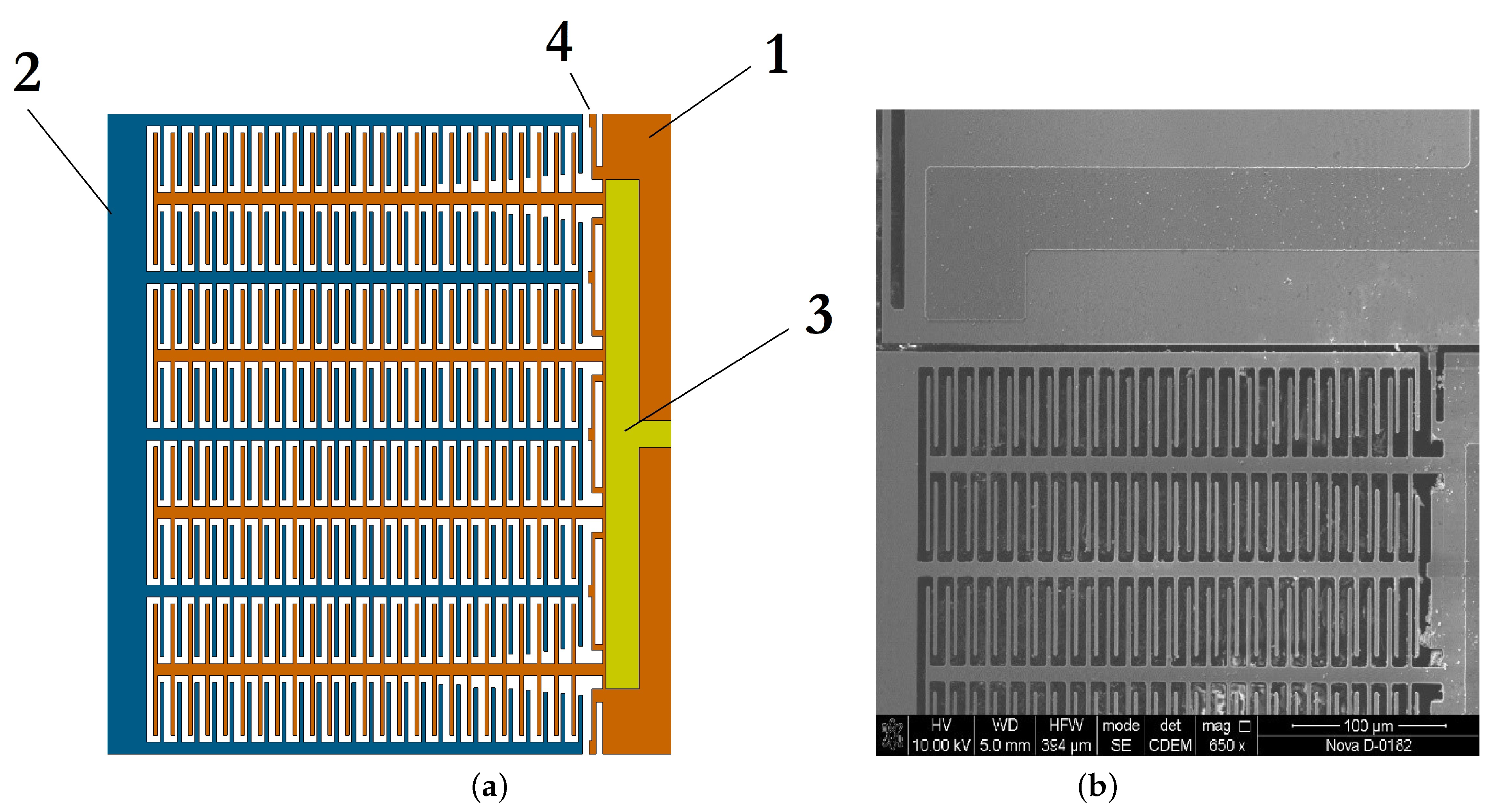
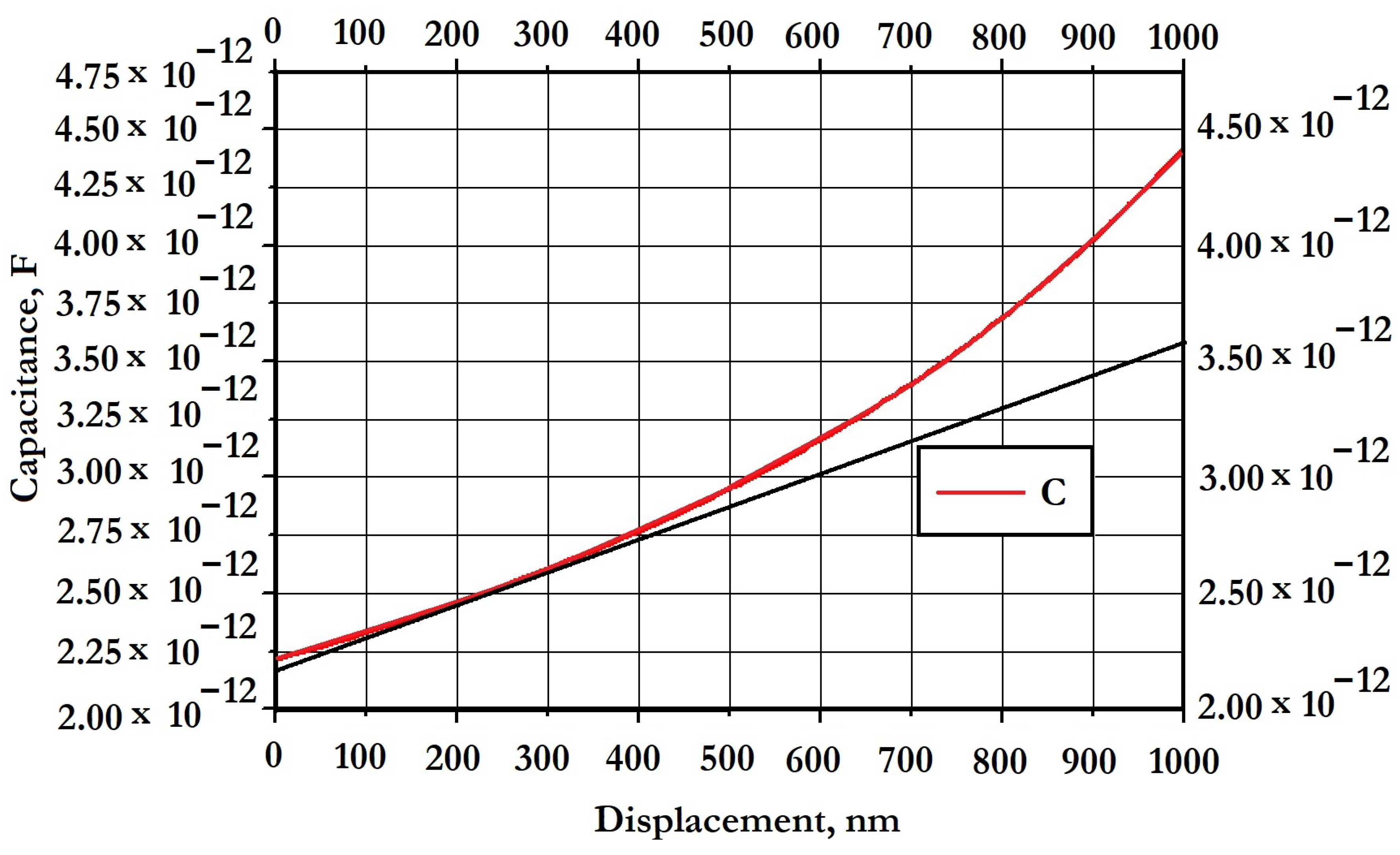
2.2.1. Capacitive Displacement Converter
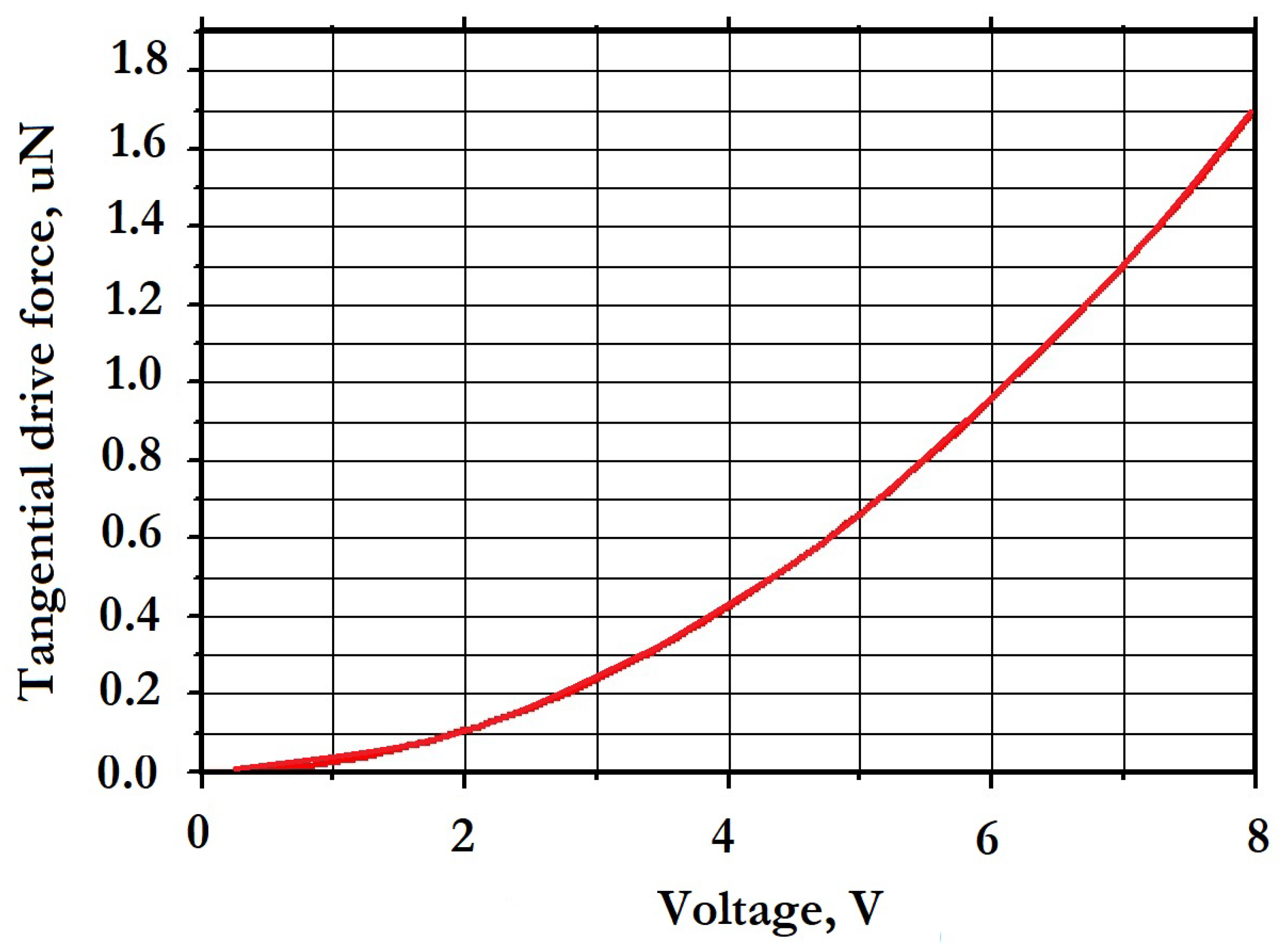
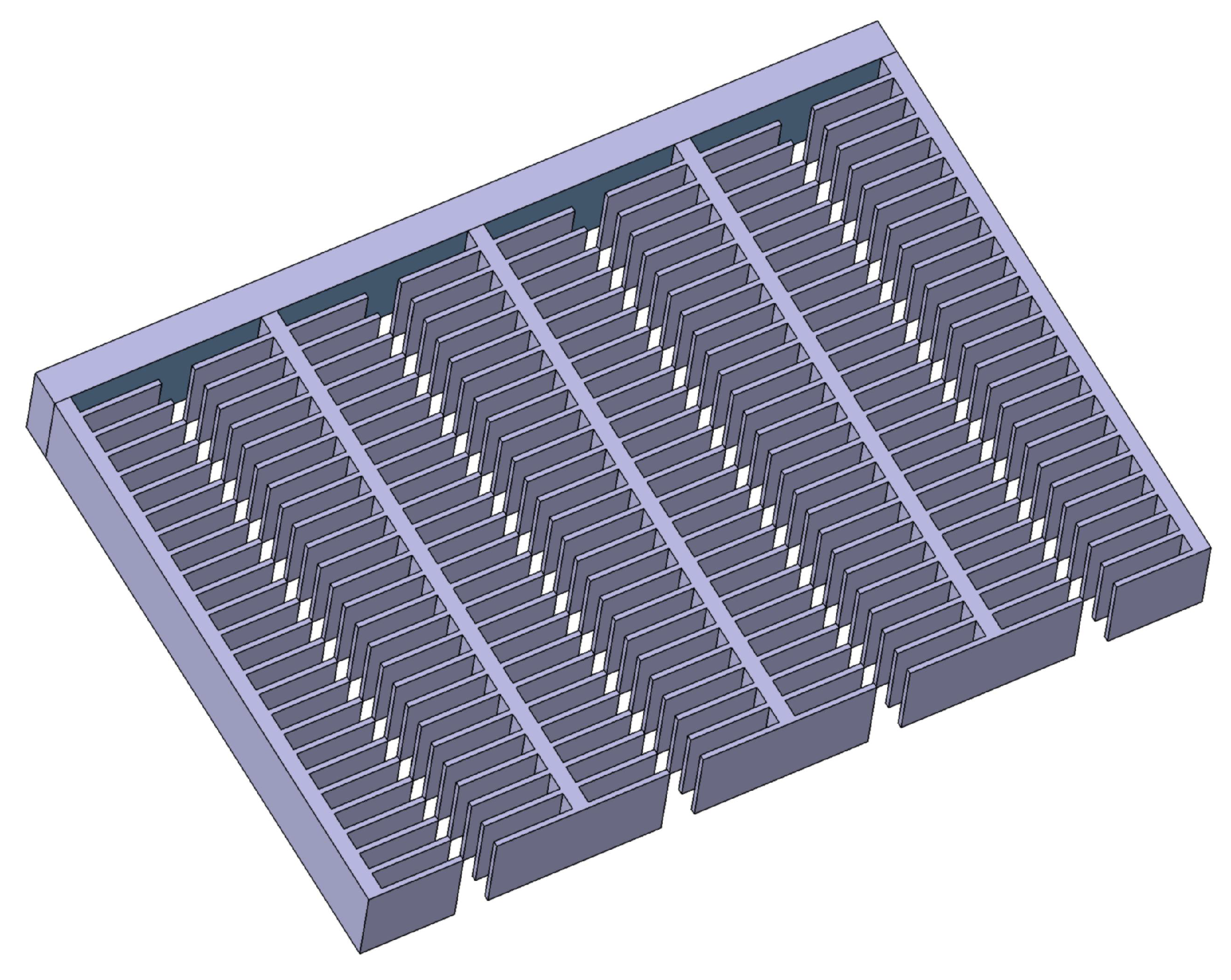
2.2.2. Electrostatic Vibration Drive
2.3. The Mechanical Part
2.3.1. Elastic Suspension Elements
2.3.2. Selection Criteria for Geometric Parameters of Elastic Elements
- -
- The operating mode and type of deformation (in-plane or out-of-plane or combined motion by the IM);
- -
- The height of the instrument layer (limits the height of the elastic beam);
- -
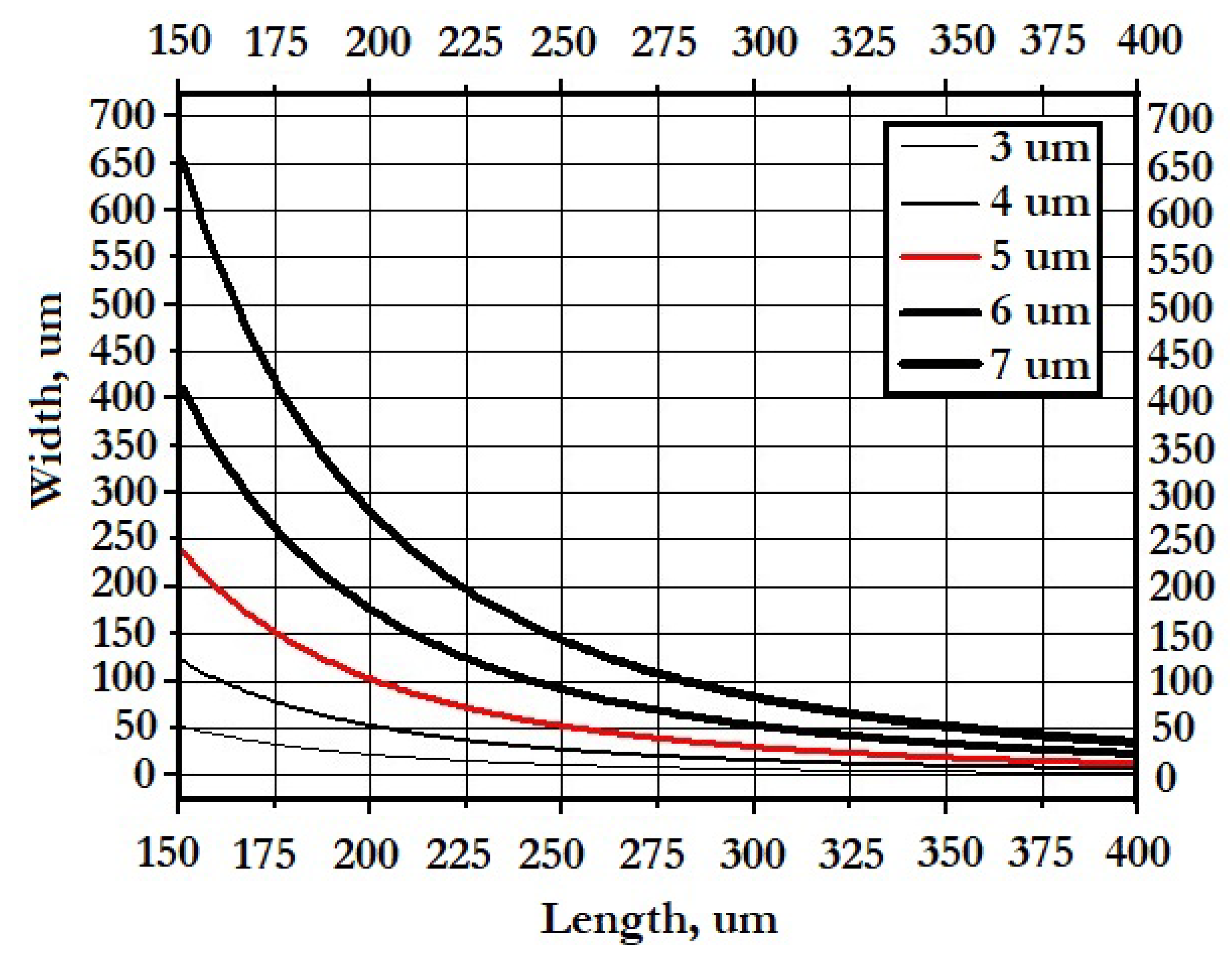
- The minimum and recommended elastic beam width (from the minimum desired value);
- -
- The maximum permissible size of the SE of the MEMS gyroscope (limits the length of the elastic beam);
- -
- The required stiffness and the amplitude of motion (determines the type of elastic element);
- -
- The temperature mode.
- 1.
- Linear stiffness should be ensured over the entire operating range; i.e., the stiffness of the element must be the same for small deformations and at maximum operating amplitude.
- 2.
- If the 1st criterion is satisfied by several options, preference should be given to an element with a larger thickness, since, in this way:
- (a)
- Technological defects (slopes, etching) have less influence, thereby increasing the yield of suitable products;
- (b)
- Higher temperature stability is provided, since the length of the element is shorter, and its elongation under the influence of temperature is also shorter;
- (c)
- It is possible to reduce the size of the SE. This opens up more room for the layout of the SE.
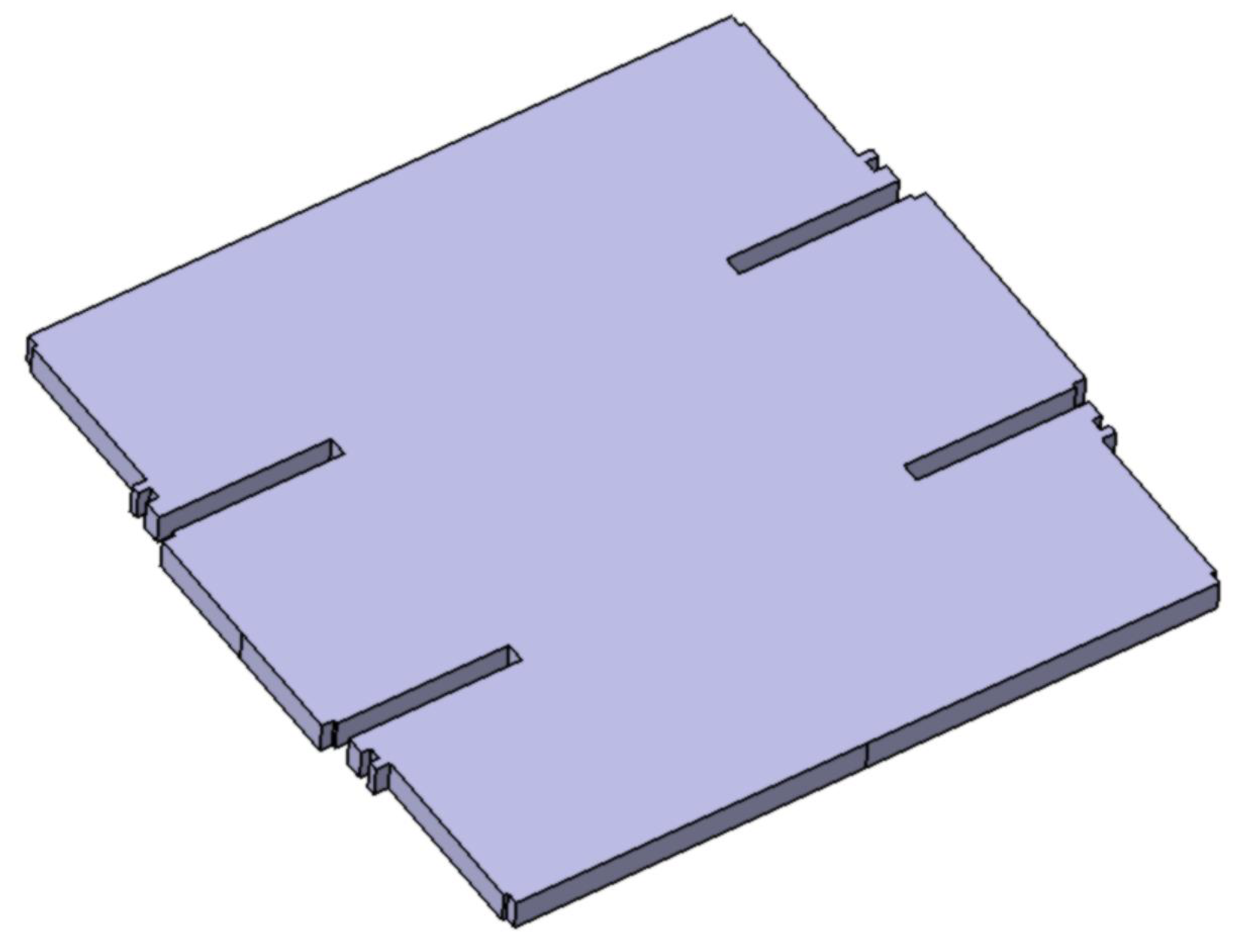
2.3.3. Elastic Suspension
- -
- The main IM−;
- -
- The mass of the frame of the electrostatic drive−;
- -
- The mass of the frame of the capacitive converter−;
- -
- The elastic elements−–.
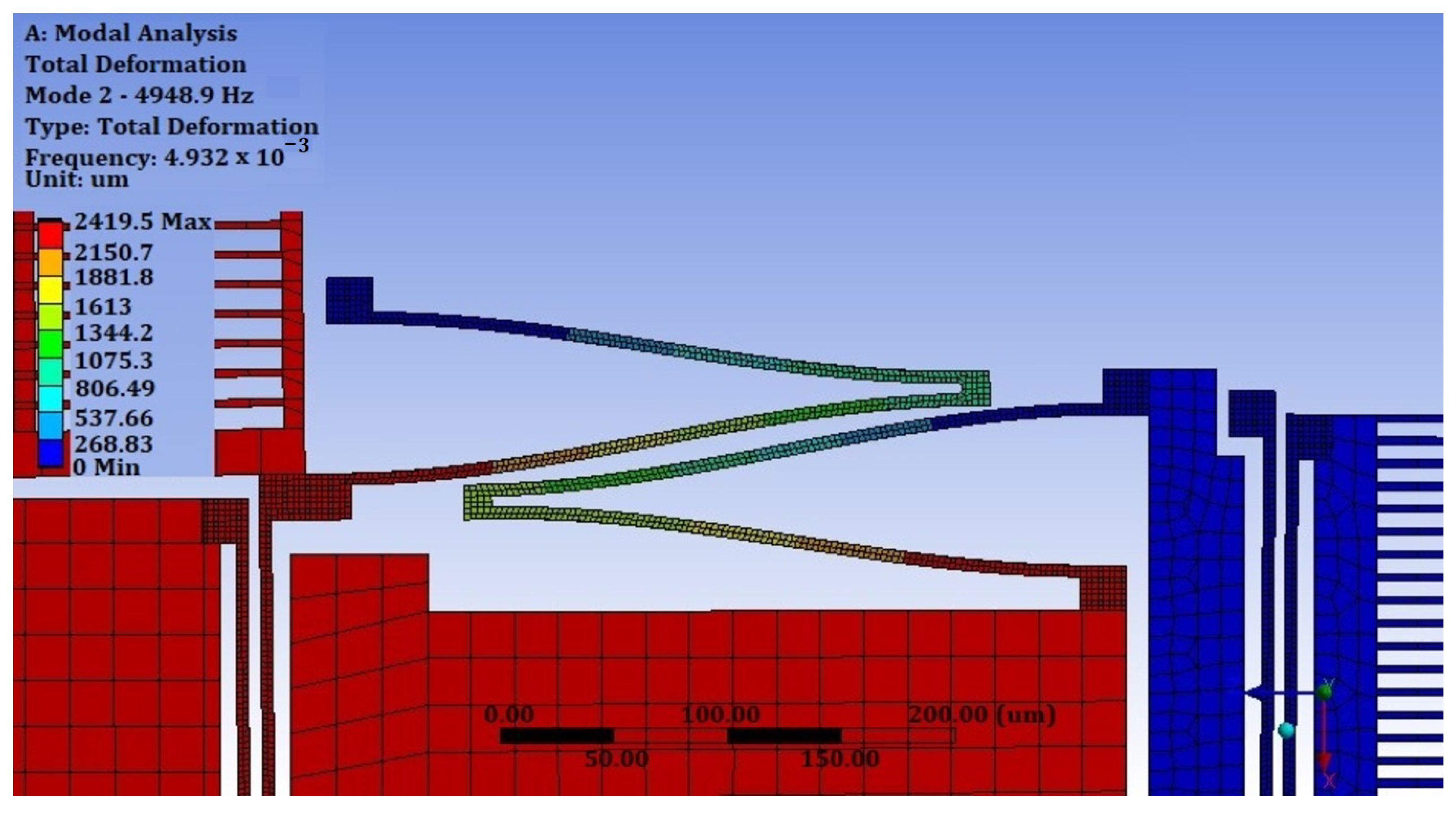
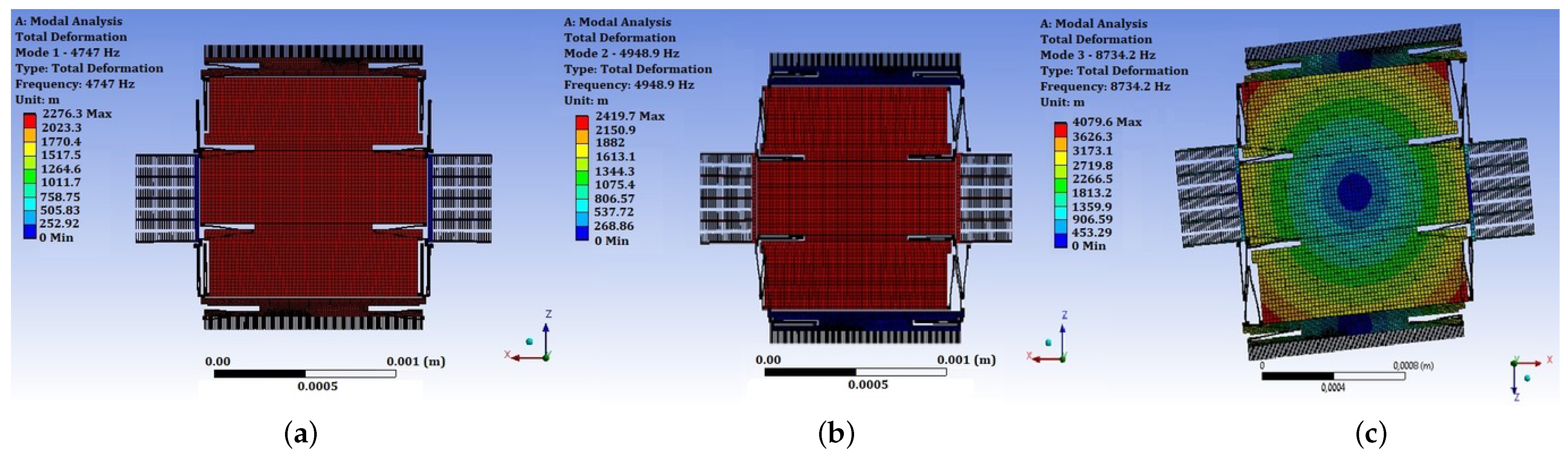
2.3.4. Modal Analysis
2.4. Modeling of the SE
2.4.1. Methods of Studying the Dynamic Characteristics
2.4.2. Investigation of Amplitude–Frequency Characteristics of FEM
2.4.3. Analytical Model of the Damping
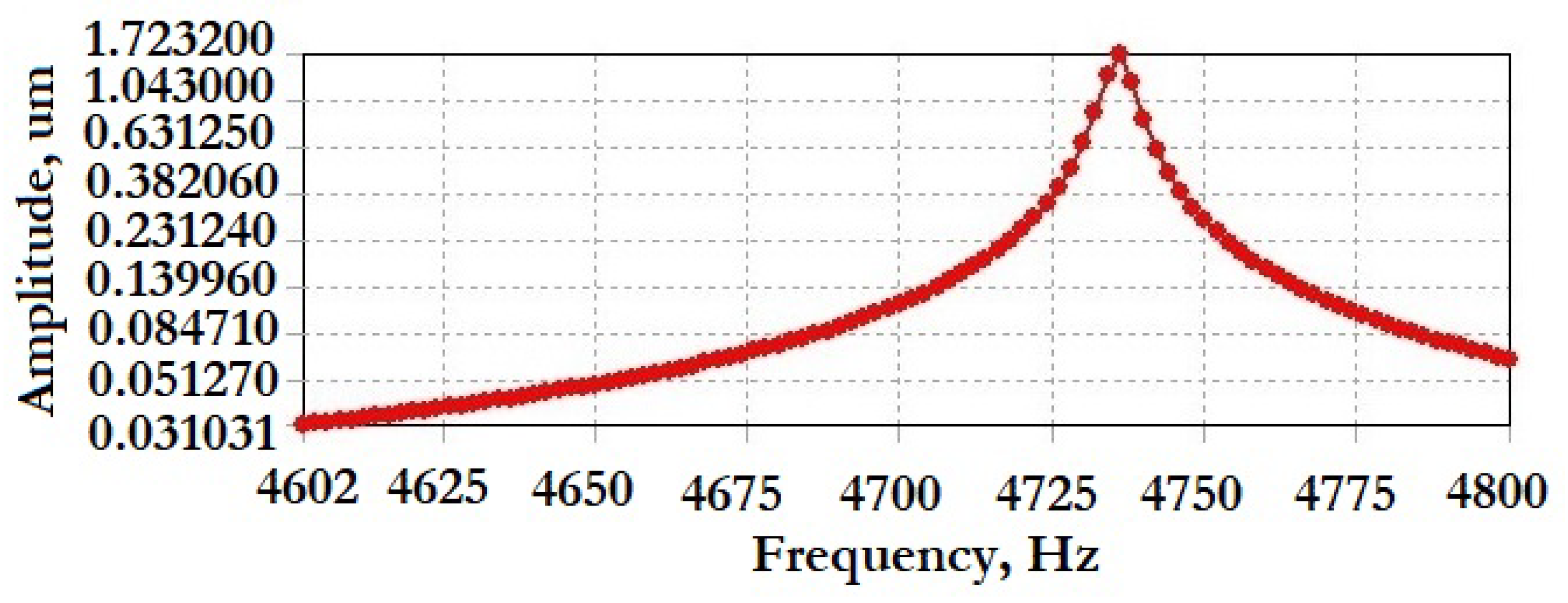
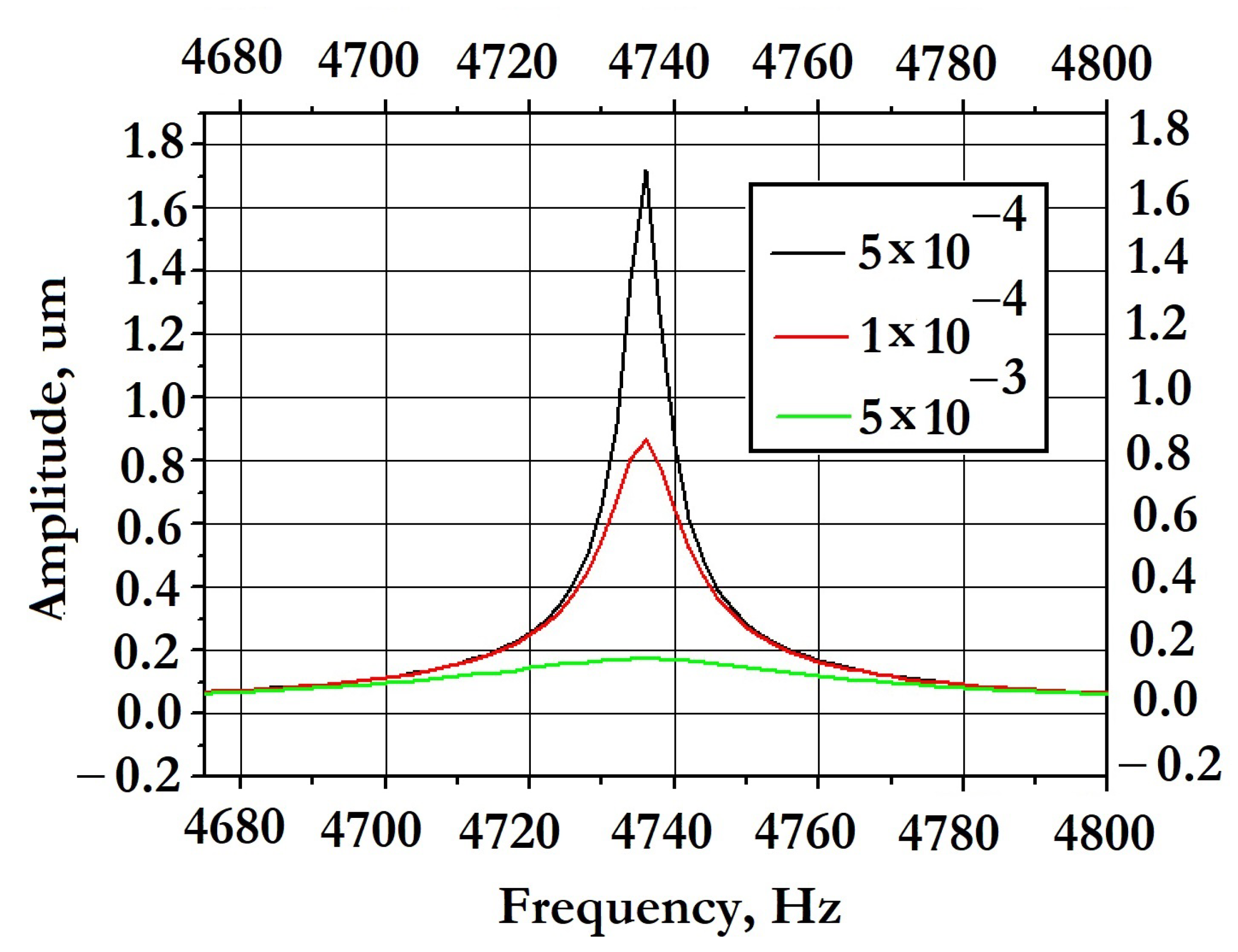
2.4.4. Amplitude–Frequency Characteristic on the Axis of Motion
- (a)
- Support of oscillation modes: 2;
- (b)
- The force of the electrostatic drive is 0.3 uN, which is approximately ±4 V;
- (c)
- The damping coefficient is −4.
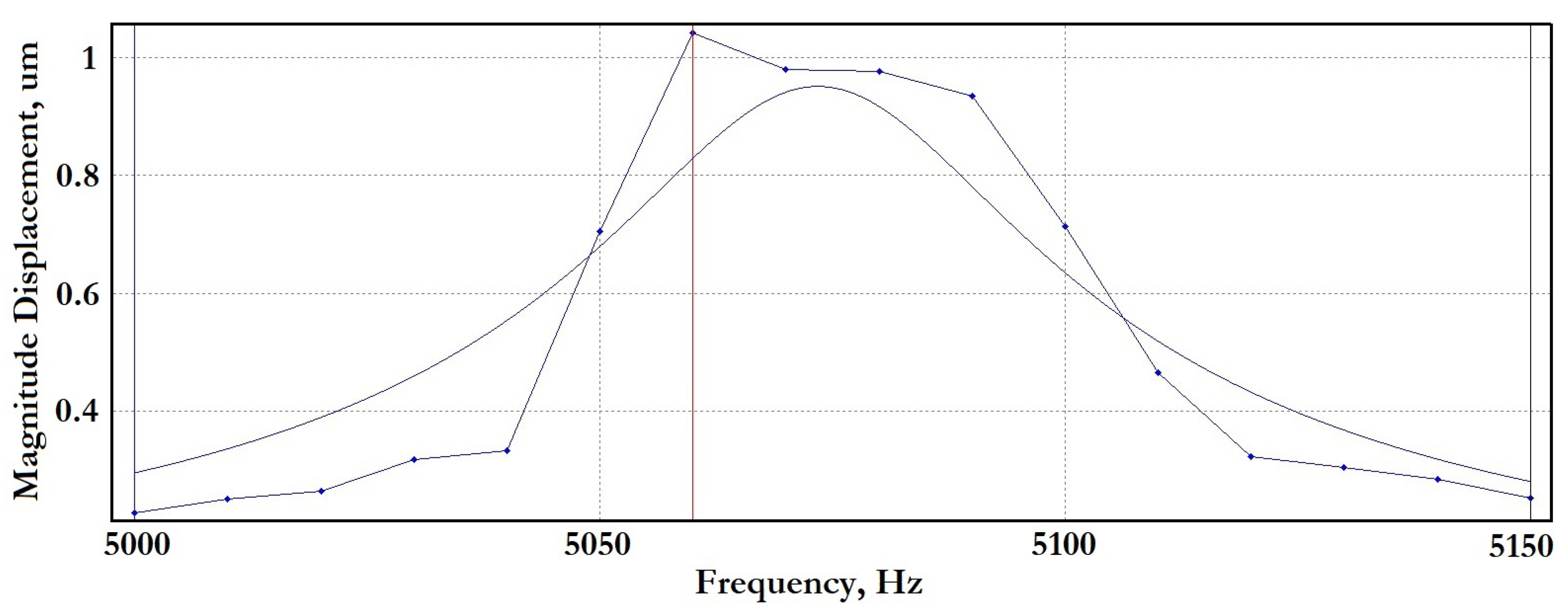
2.4.5. Amplitude–Frequency Characteristics on the Sensitivity Axis
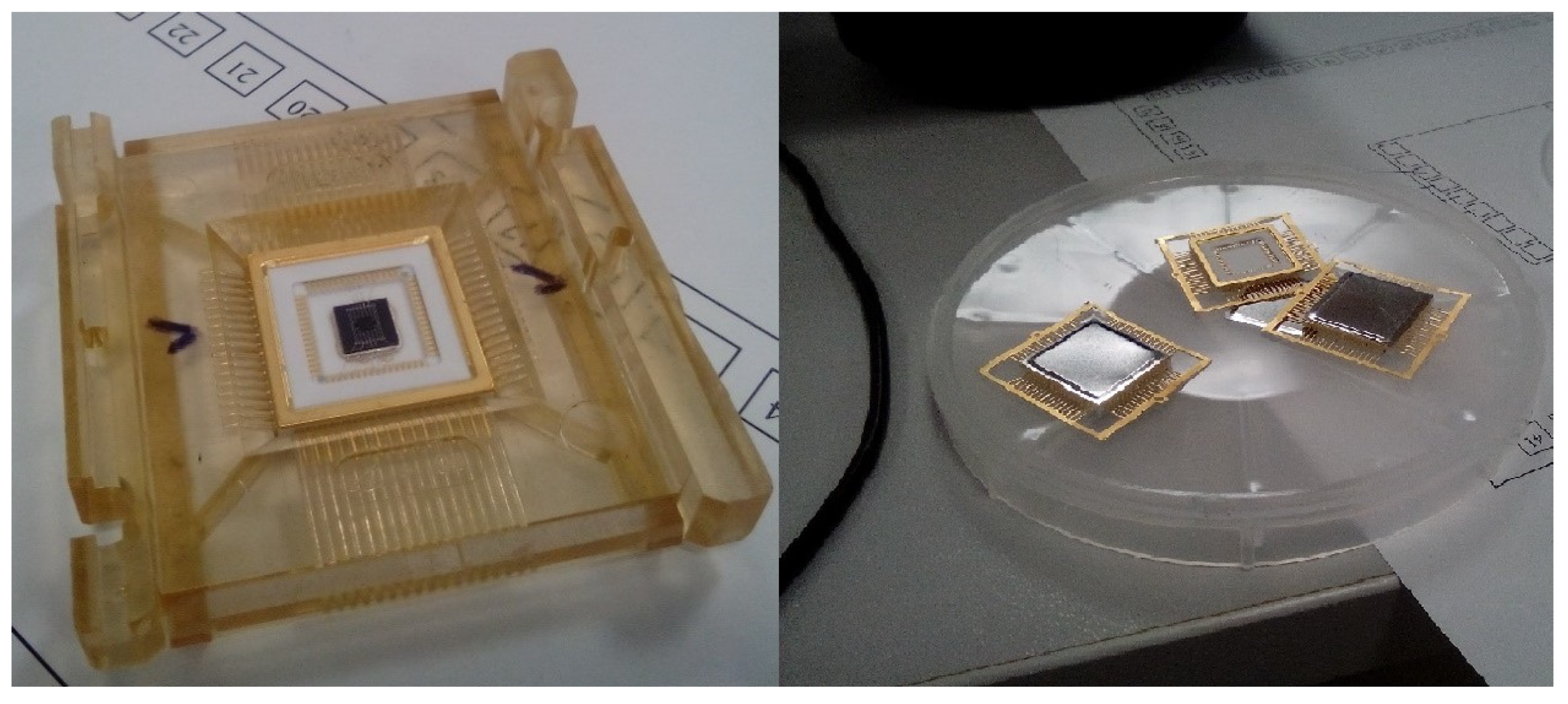
3. Manufacturing of the SE
4. Experimental Studies of a Prototype MEMS Gyroscope
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Timoshenkov, S.P.; Miheev, A.V.; Timoshenkov, A.S.; Polushkin, V.M. Perspektivy razrabotki i proizvodstva mikroakselerometrov, mikrogiroskopov i inertsialnykh navigatsionnykh sistem na osnove MEMS. Nanoindustriya 2020, 13, 468–469. [Google Scholar]
- Zhu, J.; Liu, X.; Shi, Q.; He, T.; Sun, Z.; Guo, X.; Liu, W.; Sulaiman, O.B.; Dong, B.; Lee, C. Development Trends and Perspectives of Future Sensors and MEMS/NEMS. Micromachines 2020, 11, 7. [Google Scholar] [CrossRef] [PubMed]
- Nitzan, S.; Zega, V.; Li, M.; Ahn, C.; Corigliano, A.; Kenny, T.; Horsley, D. Self-induced parametric amplification arising from nonlinear elastic coupling in a micromechanical resonating disk gyroscope. Sci. Rep. 2015, 5, 9036. [Google Scholar] [CrossRef]
- Xia, D.; Huang, L.; Xu, L.; Gao, H. Structural analysis of disk resonance gyroscope. Micromachines 2017, 8, 296. [Google Scholar] [CrossRef]
- Fan, B.; Guo, S.; Cheng, M.; Yu, L.; Zhou, M.; Hu, W.; Zheng, F.; Bu, F.; Xu, D. Frequency symmetry comparison of cobweb-like disk resonator gyroscope with ring-like disk resonator gyroscope. IEEE Electron Device Lett. 2019, 40, 1515–1518. [Google Scholar] [CrossRef]
- Giner, J.; Maeda, D.; Ono, K.; Shkel, A.; Sekiguchi, T. MEMS gyroscope with concentrated springs suspensions demonstrating single digit frequency split and temperature robustness. J. Microelectromech. Syst. 2019, 28, 25–35. [Google Scholar] [CrossRef]
- Sung, W.; Sung, S.; Lee, J.; Kang, T.; Lee, Y.; Lee, J. Development of a lateral velocity-controlled MEMS vibratory gyroscope and its performance test. J. Micromech. Microeng. 2008, 18, 055028. [Google Scholar] [CrossRef]
- Zhang, H.; Wei, X.; Ding, Y.; Jiang, Z.; Ren, J. A low noise capacitive MEMS accelerometer with anti-spring structure. Sens. Actuators A Phys. 2019, 296, 79–86. [Google Scholar] [CrossRef]
- Reddy, R.; Komeda, K.; Okamoto, Y.; Lebrasseur, E.; Higo, A.; Mita, Y. A zero-power sensing MEMS shock sensor with a latch-reset mechanism for multi-threshold events monitoring. Sens. Actuators A Phys. 2019, 295, 1–10. [Google Scholar] [CrossRef]
- Kamada, Y.; Isobe, A.; Oshima, T.; Furubayashi, Y.; Ido, T.; Sekiguchi, T. Capacitive MEMS accelerometer with perforated and electrically separated mass structure for low noise and low power. J. Microelectromech. Syst. 2019, 28, 401–408. [Google Scholar] [CrossRef]
- Yin, Y.; Fang, Z.; Liu, Y.; Han, F. Temperature-insensitive structure design of micromachined resonant accelerometers. Sensors 2019, 19, 1544. [Google Scholar] [CrossRef] [PubMed]
- Hiller, T.; Pentek, Z.; Liewald, J.; Buhmann, A.; Roth, H. Origins and mechanisms of bias instability noise in a three-axis mode-matched MEMS gyroscope. J. Microelectromech. Syst. 2019, 28, 586–596. [Google Scholar] [CrossRef]
- Yole Developpement Market & Technology Report. Status of the MEMS Industry 2021. Available online: https://www.qorvo.com/design-hub/blog/easy-way-to-a-1-gbps-rf-front-end-on-smartphones (accessed on 5 March 2023).
- Urmanov, D.M. Kontseptsiya razvitiya proizvodstva MEMS-izdelii v Rossii na period do 2017. Datchiki I Sist. 2012, 9, 65–70. [Google Scholar]
- Aksenov, V.V. Instrumentalnye sredstva dlya eksperimentalnogo postroeniya modeli pogreshnostei MEMS akselerometra. Inzhenernyi Vestn. Dona 2020, 11, 1–19. [Google Scholar]
- Aung, T. Issledovanie stoikosti MEMS-akselerometrov emkostnogo tipa k vneshnim mekhanicheskim vozdeistviiam. Izvestiia Vysshikh Uchebnykh Zavedenii. Elektronika. 2019, 6, 619–626. [Google Scholar]
- Rakhmatulin, A.S.; Popov, V.D.; Denisenko, M.A.; Isaeva, A.S. Mnogoosevoi Tunnelnyi Akselerometra na Osnove GaAs/InAs. Nanoelektronika, Nanofotonika i Nelineinaia Fizika. Sbornik Trudov XIV Vserossijskoj konferencii Molodyh Uchenyh: “Nanoelektronika, Nanofotonika i Nelinejnaya Fizika”, Saratov, Russia, 17–19 September 2019; pp. 198–199. Available online: https://hub.sfedu.ru/repository/material/801269056/ (accessed on 5 March 2023).
- Izotova, E.M. Tendentsii razvitiia mikrogiroskopov na poverkhnostno-akusticheskikh volnakh. Nauka Nastoiashchego i Budushchego 2018, 1, 350–354. [Google Scholar]
- Timoshenkov, S. Chuvstvitelnye elementy MEMS: Tekhnologiia opredeliaet parametry. Elektronika Nauka Tekhnologiia Biznes 2008, 1, 80–83. [Google Scholar]
- SOIMUMPs Design Handbook (Revision 8.0.). Available online: http://www.memscap.com (accessed on 5 March 2023).
- Raspopov, V.I. Mikromekhanicheskie Pribory: Uchebnoe Posobie; Mashinostroenie: Moscow, Russia, 2007. [Google Scholar]
- IFOG-Draper Laboratory. Available online: https://www.draper.com/explore-solutions/ifog (accessed on 5 March 2023).
- GYPRO2300LD. Available online: https://www.tronics.tdk.com/ (accessed on 5 March 2023).
- Lysenko, I.E.; Ryndin, E.A.; Dudin, N.K. Ustroistva obrabotki signalov emkostnykh preobrazovatelei mikromekhanicheskikh komponentov. Nano-i Mikrosistemnaia Tekhnika 2012, 7, 48–51. [Google Scholar]
- SI-WARE Systems. Available online: https://www.si-ware.com/ (accessed on 5 March 2023).
- Shkel, A.; Acar, C. Two types of micromachined vibratory gyroscopes. IEEE Sens. 2005, 531–536. [Google Scholar]
- Acar, C.; Shkel, A.M. An Approach for Increasing Drive-Mode Bandwidth of MEMS Vibratory Gyroscopes. J. Microelectromech. Syst. 2005, 14, 520–528. [Google Scholar] [CrossRef]
- Acar, C.; Shkel, A.M. Non-Resonant Micromachined Gyroscopes with Mode-Decoupling. IEEE Sens. J. 2003, 3, 497–506. [Google Scholar] [CrossRef]
- Painter, C.; Shkel, A.M. Active Structural Error Supression in MEMS Vibratory Rate Integrating Gyroscopes. IEEE Sens. J. 2003, 3, 595–606. [Google Scholar] [CrossRef]
- Yazdi, N.; Ayazi, F.; Najafi, K. Micromachined Inertial Sensors. Proc. IEEE 1998, 86, 1641–1659. [Google Scholar] [CrossRef]
- Soderkvist, J. Micromachined gyroscopes. Sens. Actuators A 1994, 43, 65–71. [Google Scholar] [CrossRef]
- Shi, Y.; Xi, X.; Li, B.; Chen, Y.; Wu, Y.; Xiao, D.; Wu, X.; Lu, K. Micro Hemispherical Resonator Gyroscope with Teeth-like Tines. IEEE Sens. 2021, 12, 13098–13106. [Google Scholar] [CrossRef]
- Silicon Sensing Evolution of VSG. Available online: https://www.siliconsensing.com/technology/evolution-of-vsg/ (accessed on 5 March 2023).
- Sysoeva, S.C. Tendentsii rynka High-end MEMS-datchikov inertsii. Novye urovni kharakteristik i ispolneniia. Komponenty i Tekhnologii 2014, 6, 40–46. [Google Scholar]
- Sysoeva, S.S. Vvedenie v High-End segmenty primenenii MEMS-tekhnologii. Ch. 2. Komponenty i Tekhnologii 2010, 11, 15–22. [Google Scholar]
- Acar, C.; Shkel, A.M. Structurally decoupled micromachined gyroscopes with postrelease capacitance enhancement. J. Micromech. Microeng. 2005, 15, 1092–1101. [Google Scholar] [CrossRef]
- Sharma, A.; Zaman, M.; Amini, B.; Ayazi, F. A High-Q In-Plane SOI Tuning Fork Gyroscope. In Proceedings of the IEEE Conference on Sensors, Vienna, Austria, 24–27 October 2004; pp. 467–470. [Google Scholar]
- Zaman, M.; Sharma, A.; Amini, B.; Ayazi, F. Towards Inertial Grade Vibratory Microgyros: A High-Q in-Plane Silicon-on-Insulator Tuning Fork Device. In Proceedings of the Solid-State Sensor, Actuator and Microsystems Workshop, Hilton Head Island, SC, USA, 6–10 June 2004; pp. 384–385. [Google Scholar]
- Zaman, M.; Sharma, A.; Ayazi, F. High Performance Matched-Mode Tuning Fork Gyroscope. In Proceedings of the IEEE Conference on MEMS, Istanbul, Turkey, 22–26 January 2006; pp. 66–69. [Google Scholar]
- Hao, Z.; Zaman, M.; Sharma, A.; Ayazi, F. Energy Loss Mechanisms in a Bulk-Micromachined Tuning Fork Gyroscope. In Proceedings of the 5th IEEE Conference on Sensors, Daegu, Korea, 22–25 October 2006; pp. 1333–1336. [Google Scholar]
- Sharma, A.; Zaman, M.F.; Ayazi, F. A sub-0.2°/h bias drift micromechanical silicon gyroscope with automatic CMOS mode-matching. IEEE J. Solid-State Circuits 2009, 44, 1593–1608. [Google Scholar] [CrossRef]
- Walther, A.; Desloges, B.; Lejuste, C.; Coster, B.; Audebert, P.; Willemin, J. Development of a 3D capacitive gyroscope with reduced parasitic capacitance. J. Micromech. Microeng. 2013, 23, 1–8. [Google Scholar] [CrossRef]
- Traechtler, M.; Link, T.; Dehnert, J.; Nommensen, P.; Manoli, Y. Novel 3-Axis Gyroscope on A Single Chip Using SOI-Technology. In Proceedings of the IEEE Conference on Sensors, Atlanta, GA, USA, 28–31 October 2007; pp. 124–127. [Google Scholar]
- Alper, S.E.; Azgin, K.; Akin, T. High-performance SOI-MEMS Gyroscope with Decoupled Oscillation Modes. In Proceedings of the 19th IEEE International Conference on MEMS, Istanbul, Turkey, 22–26 January 2006; pp. 70–73. [Google Scholar]
- Alper, S.E.; Azgin, K.; Akin, T. A high-performance silicon-on-insulator MEMS gyroscope operating at atmospheric pressure. Sens. Actuators A Phys. 2007, 135, 34–42. [Google Scholar] [CrossRef]
- Maenaka, K.; Saws, N.; Ioku, S.; Sugimoto, H.; Suzuki, H.; Fujita, T.; Takayama, Y. MEMS Gyroscope with Double Gimbal Structure. In Proceedings of the 12th International Conference on Transducers, Solid-State Sensors, Actuators and Microsystems, Boston, MA, USA, 8–12 June 2003; pp. 163–166. [Google Scholar]
- Trusovs, A.A.; Schofield, A.R.; Shkel, A.M. Micromachined rate gyroscope architecture with ultra-high quality factor and improved mode ordering. Sens. Actuators A Phys. 2011, 165, 26–34. [Google Scholar] [CrossRef]
- Schofield, R.A.; Trusovs, A.A.; Shkel, A.M. Anti-Phase Driven Rate Gyroscope with Multi-Degree of Freedom Sense Mode. In Proceedings of the International Conference on Transducers, Solid-State Sensors, Actuators and Microsystems, Lyon, Frace, 10–14 June 2007; pp. 1119–1202. [Google Scholar]
- Geiger, W.; Kieninger, M.; Pascal, M.; Folkmer, B.; Lang, W. Micromachined angular rate sensor MARS-RR. In Proceedings of the SPIE 3514, Micromachined Devices and Components IV, Santa Clara, CA, USA, 8 September 1998; pp. 190–198. [Google Scholar]
- Sysoeva, S.S. Vvedenie v High-End segmenty primenenii MEMS-tekhnologii. Ch. 3. Komponenty i Tekhnologii 2010, 12, 24–30. [Google Scholar]
- Williams, C.B.; Shearwood, C.; Mellor, P.B.; Yates, R.B. Modelling and testing of a frictionless levitated micromotor. Sens. Actuators 1997, 67, 469–473. [Google Scholar] [CrossRef]
- Federal Service Intellectual Property. Invention of the Russian Federation. Patent 2021135681, 22 August 2022. Available online: https://www.fips.ru/registers-doc-view/fips_servlet?DB=RUPAT&DocNumber=2778622&TypeFile=html (accessed on 5 March 2023).
- Lysenko, I.E.; Naumenko, D.V.; Ezhova, O.A. Analysis of frequency response sensor of MEMS gyroscope in vacuum chamber. In Proceedings of the 8th International School and Conference “Saint Petersburg OPEN 2021”: Optoelectronics, Photonics, Engineering and Nanostructures (SPbOPEN 2021), Saint-Petersburg, Russia, 25–28 May 2021; pp. 1–6. [Google Scholar]
- Joint Stock Company “Zelenograd Nanotechnology Center”. IC Converter Capacity-Voltage 5201TK015. Available online: https://zntc.ru/research/design-center/products/is-preobrazovatelya-emkost-napryazhenie-5201tk015.php (accessed on 5 March 2023).
- Research Institute of Measuring Systems Yu.E. Sedakova. Radiation-Resistant Microcontrollers and Microprocessors. Available online: https://niiis-micro.ru/processors (accessed on 5 March 2023).




































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Total number of comb fingers, | 250 |
| Finger height, | 50 m |
| Overlap length, l | 40 m |
| Finger overlap area, S | −7, |
| The size of the air gap between the fingers, | 2 m |
| Estimated capacitance | 2.2 pF |
| Full differentiation capacitance | 4.4 pF |
| Final differential capacitance (displacement 0.4 m) | 5.5 pF |
| Sensitivity | 2.5 pF/m |
| Parameter | Value |
|---|---|
| Comb height, | 50 m |
| Number of pairs of fingers, N | 120 |
| The length of the overlap of the combs, | 60 m |
| The gap between the fingers, | 2 m |
| The width of the comb finger | 3 m |
| Parameter | Value |
|---|---|
| Comb height, | 50 m |
| Number of pairs of fingers, N | 120 |
| Length of the overlap of the combs, | 60 m |
| Gap between the fingers, | 2 m |
| Width of the comb finger | 3 m |
| Width, b μm | Length, l μm | Width, h μm |
|---|---|---|
| Elastic beam | ||
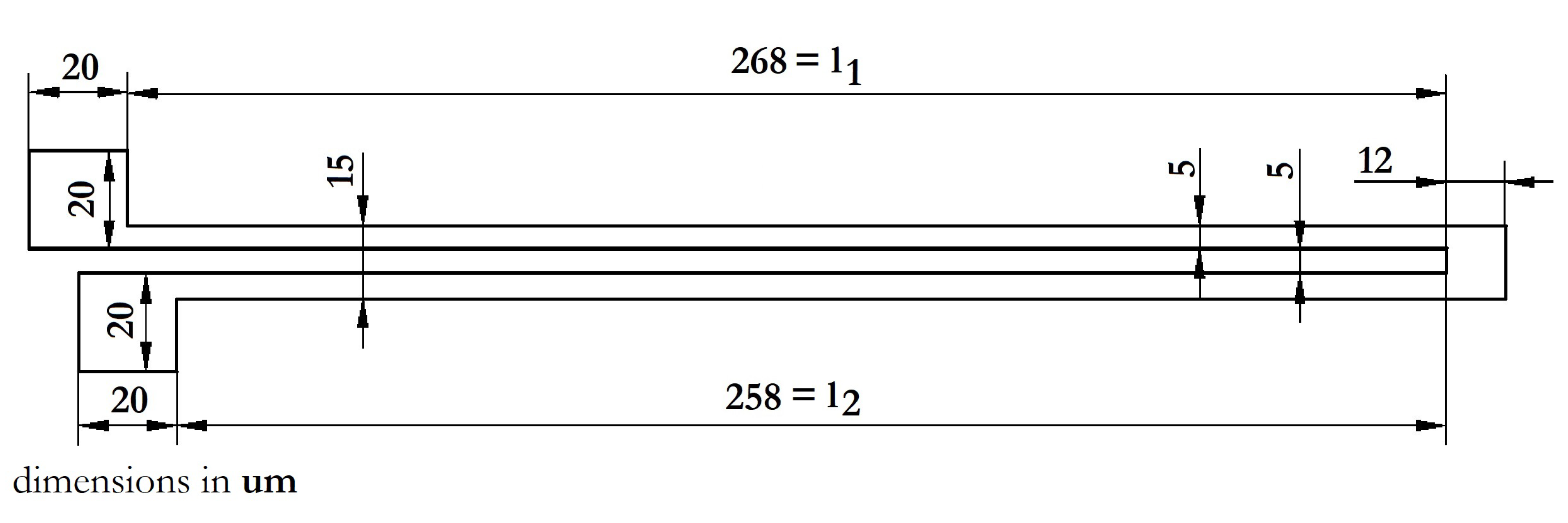
| 5 | 268 | 50 |
| Analytical stiffness, N/m | ||
| Elastic beam | ||
| 5 | 258 | 50 |
| Analytical stiffness, N/m | ||
| Parameter | Value |
|---|---|
| Material of the working layer | Si |
| Thickness of the working layer | 50 m |
| IM, | 1.6 × 10−7 kg |
| Weight of the electrostatic drive | 1.4 × 10−8 kg |
| Mass of measuring electrodes | 5.9 × 10−9 kg |
| Mass of the elastic element | 4.15 × 10−10 kg |
| Stiffness of the elastic element | 21.736 N/m |
| Natural frequency in DM | 4750 Hz |
| Natural frequency in SM | 5000 Hz |
| Parameter | Value |
|---|---|
| Wafer thickness, μm | 450 |
| Wafer resistivity, m | 15 |
| Depth of the drawn alignment marks, μm | 0.5 |
| Thickness of the oxide (supports for SOI), | 2 |
| Depth of the cavity in the base, μm | 80 |
| Thickness of the working layer, μm | 50 |
| Resistivity of the working layer, m | − |
| Thickness of the oxide above the working layer, μm | 0.6 |
| Thickness of the metallization layer (Al), μm | 0.7 |
| Specific surface resistance of the metallization layer (Al), | 0.06 |
| Depth of the “trench” for eutectic, μm | 4 |
| Width of the “trench” in the active structure, μm | 2 |
| Title | Layer Assignment | GDSII Layer Code |
|---|---|---|
| BASEMARK | Alignment labels | MRKB |
| SUPPORT | Supports for SOI | SUP |
| BASECAVITY | Cavities in the substrate | CAVB |
| ACTIVE | Active structures (movable mass) | ACT |
| METAL | Metallization layer | MET |
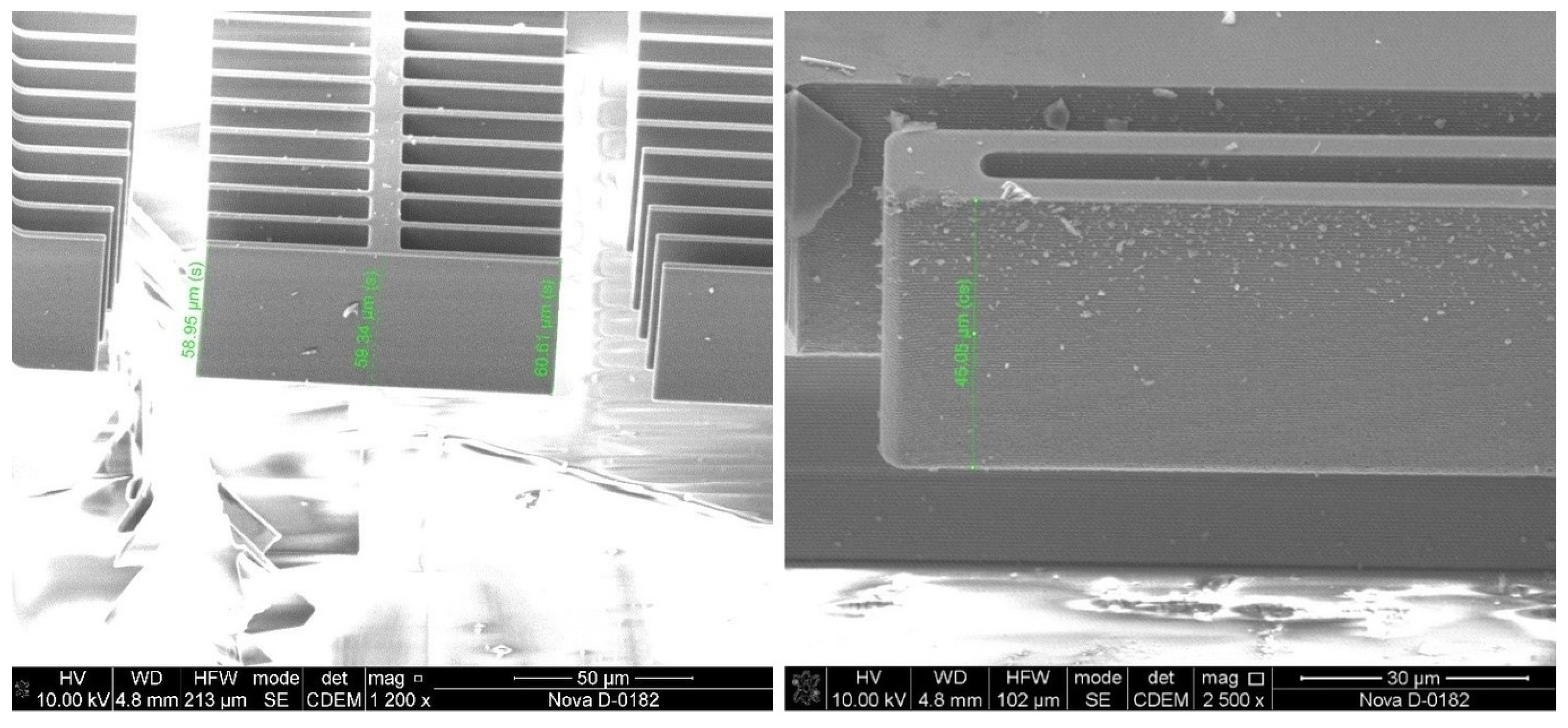
| Topological Element | Measured Value, μm | Nominal Value, μm | Measurement Accuracy, % |
|---|---|---|---|
| Linear dimensions of elements | |||
| Elastic beam length | 269 | 270 | −0.3 |
| Length of the electrostatic actuator electrode | 71.51 | 70 | +2.1 |
| Length of the finger of the capacitive converter | 46.13 | 45 | −1.8 |
| Length of the locking converter | 279.23 | 280 | −0.28 |
| Width of the U-shaped beam | 4.8–5.17 | 5 | ±4 |
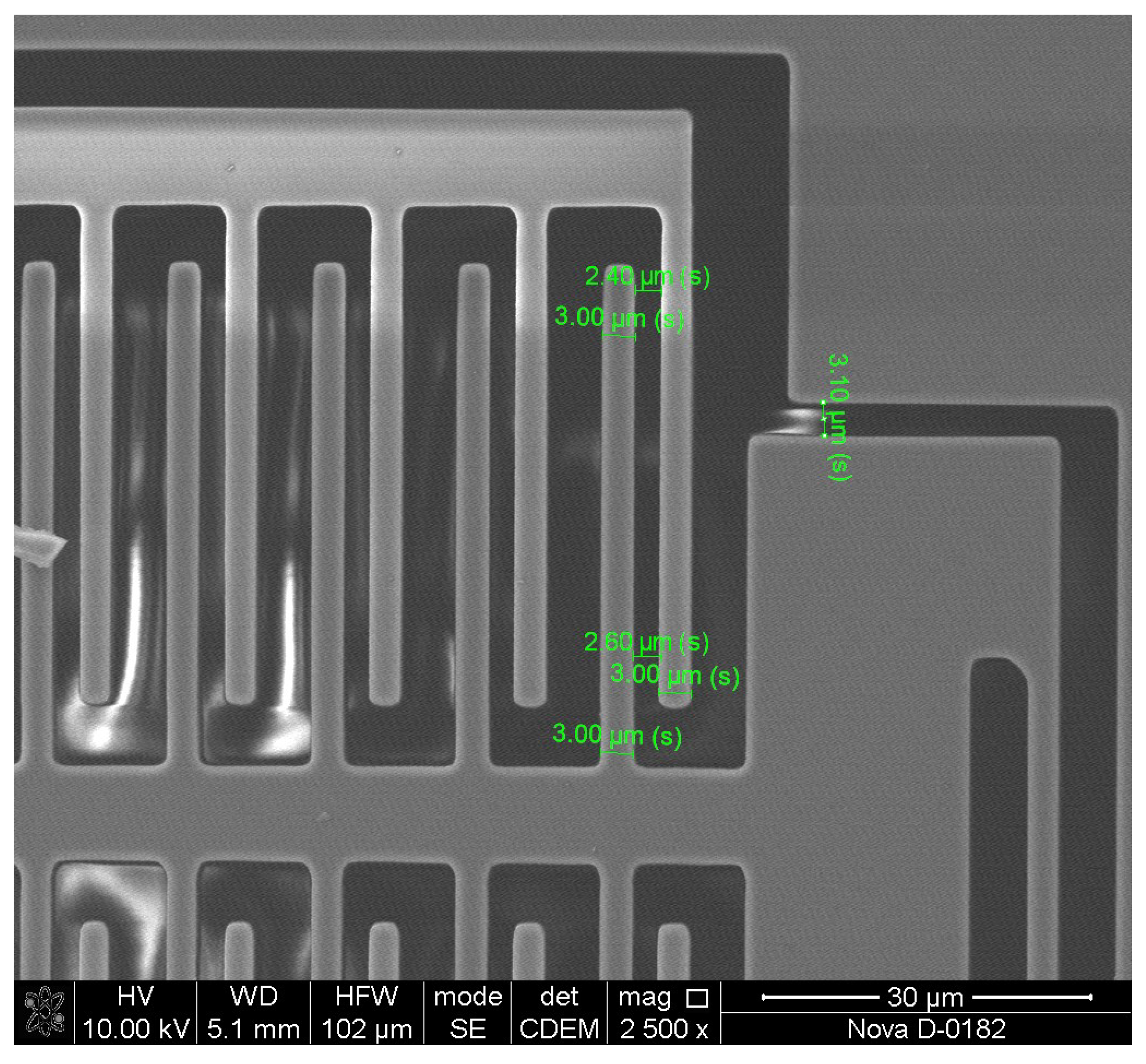
| Width of the finger of the capacitive converter | 2.88–3.00 | 3 | −4/0 |
| Width of the finger of the electrostatic actuator | 2.7–2.9 | 3 | −10/−3 |
| Beam width of the electrostatic actuator | 8.87 | 9 | −1.44 |
| Gaps between elements | |||
| Gap between the electrodes of the electrostatic actuator | 2.38–2.5 | 2 | +25 |
| Gap between the electrodes of the capacitive converter | 2.4–2.6 | 3 | −13.3 |
| Gap between the beams U-shaped elastic element | 5.6–5.79 | 6 | −6.7 |
| Vertical size | |||
| Height of the structural layer | 45...59 | 50 | 10–20 |
| Parameter | DM | SM |
|---|---|---|
| External pressure | 5000 Pa | 5000 Pa |
| Constant voltage | +2 | +1 |
| Variable voltage | ±5 | ±3 |
| Scanning range | 4700–4900 Hz | 5000–5150 Hz |
| Natural oscillation frequency | 4800 Hz | 5060 Hz |
| Oscillation amplitude | 1.646 | 1.041 |
| Bandwidth level −3db | 4.75 Hz | 47.72 Hz |
| Q-factor | 1010.5 | 106.03 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Naumenko, D.; Tkachenko, A.; Lysenko, I.; Kovalev, A. Development and Research of the Sensitive Element of the MEMS Gyroscope Manufactured Using SOI Technology. Micromachines 2023, 14, 895. https://doi.org/10.3390/mi14040895
Naumenko D, Tkachenko A, Lysenko I, Kovalev A. Development and Research of the Sensitive Element of the MEMS Gyroscope Manufactured Using SOI Technology. Micromachines. 2023; 14(4):895. https://doi.org/10.3390/mi14040895
Chicago/Turabian StyleNaumenko, Danil, Alexey Tkachenko, Igor Lysenko, and Andrey Kovalev. 2023. "Development and Research of the Sensitive Element of the MEMS Gyroscope Manufactured Using SOI Technology" Micromachines 14, no. 4: 895. https://doi.org/10.3390/mi14040895
APA StyleNaumenko, D., Tkachenko, A., Lysenko, I., & Kovalev, A. (2023). Development and Research of the Sensitive Element of the MEMS Gyroscope Manufactured Using SOI Technology. Micromachines, 14(4), 895. https://doi.org/10.3390/mi14040895