
A Wireless, High-Quality, Soft and Portable Wrist-Worn System for sEMG Signal Detection

 ,
,  ,
, 
Abstract
:1. Introduction
2. System Design
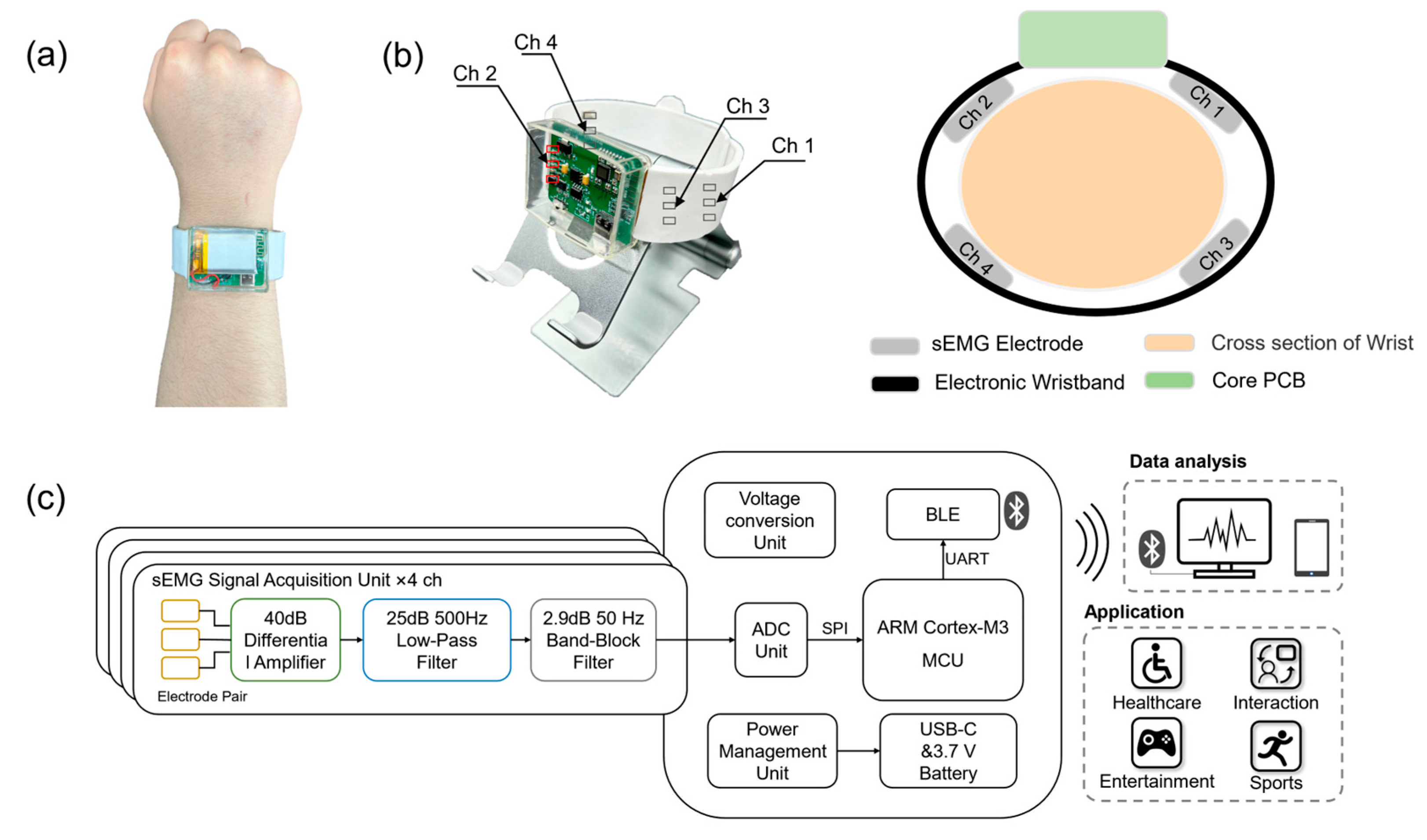
2.1. General Architecture
2.2. Skin-Attached Electronic Wristband and System Package
- (1)
- Substrate Preparation: The process begins with preparing the substrate material, which uses a flexible polymer membrane material: polyimide. The substrate is cleaned and coated with a layer of adhesive material to enhance adhesion;
- (2)
- Photolithography: A photosensitive material called a photoresist is applied onto the substrate. The circuit design is then transferred onto the photoresist using photolithography techniques. Ultraviolet (UV) light is used to expose the photoresist through a photomask, creating a pattern that matches the circuit layout.
- (3)
- Etching: After the photoresist is exposed, the unexposed areas are dissolved, leaving behind the desired circuit pattern on the substrate. Chemical etching is commonly used to selectively remove the unwanted copper or other conductive material.
- (4)
- Plating: The exposed conductive areas are plated with additional layers of metal, typically copper, to increase the thickness and improve conductivity. This step helps reinforce the conductive traces and pads.
- (5)
- Solder Mask Application: A solder mask layer is applied to the FPCB, except for the areas where the electrical connections need to be made. The solder mask protects the circuit from environmental factors and prevents unintentional short circuits.
- (6)
- Component Attachment: Surface mount technology (SMT) or through-hole technology (THT) is used to attach electronic components onto the FPCB. SMT involves placing components onto solder pads and reflowing the solder to establish electrical connections. THT involves inserting components through drilled holes and soldering them on the opposite side.
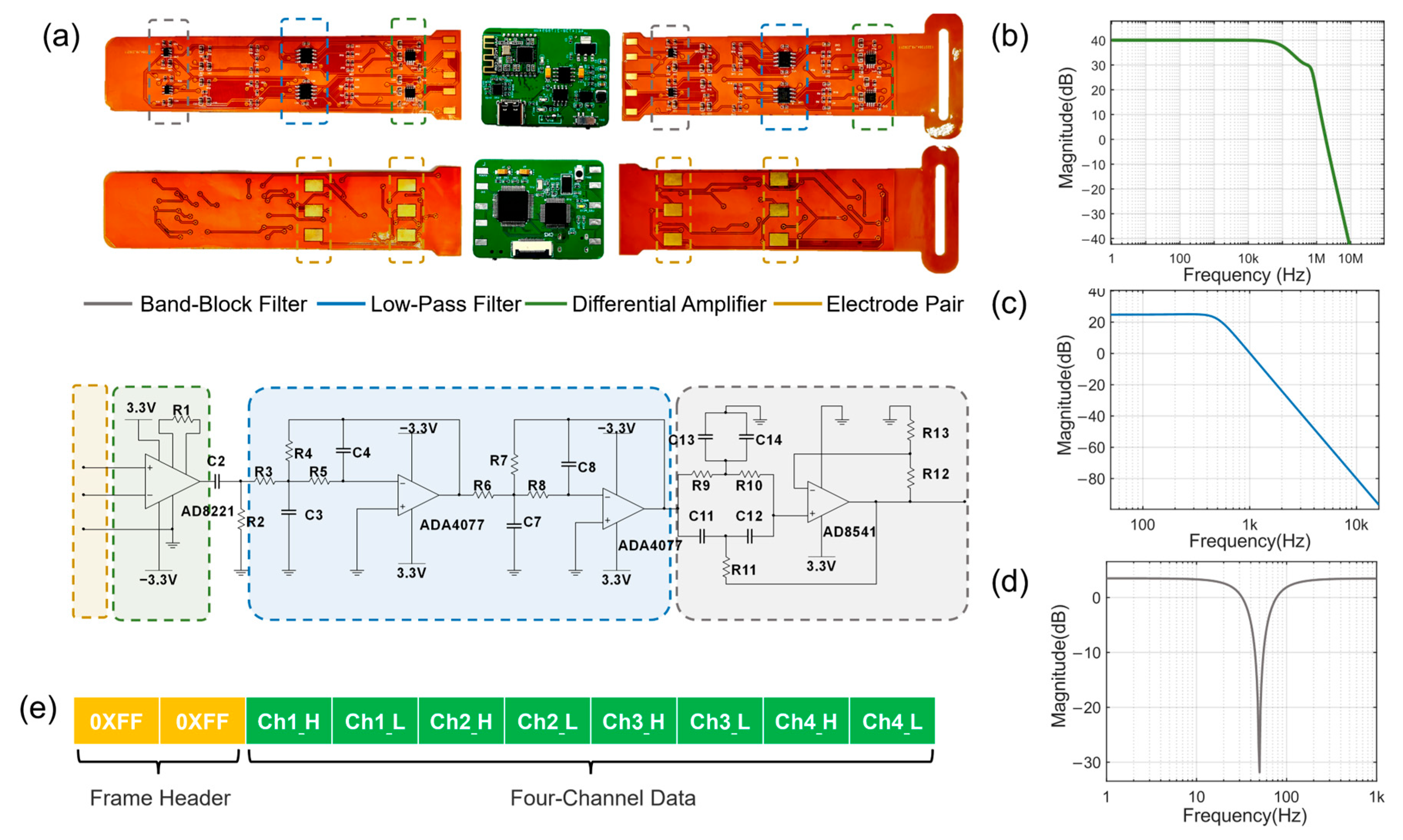
2.3. Circuits and Electronics Unit Design
2.3.1. sEMG Signal Acquisition Unit
2.3.2. Control Unit
2.3.3. Wireless Communication Unit
2.3.4. Power Management and Voltage Conversion Units
2.4. Data Processing and Visualization
3. Results and Discussion
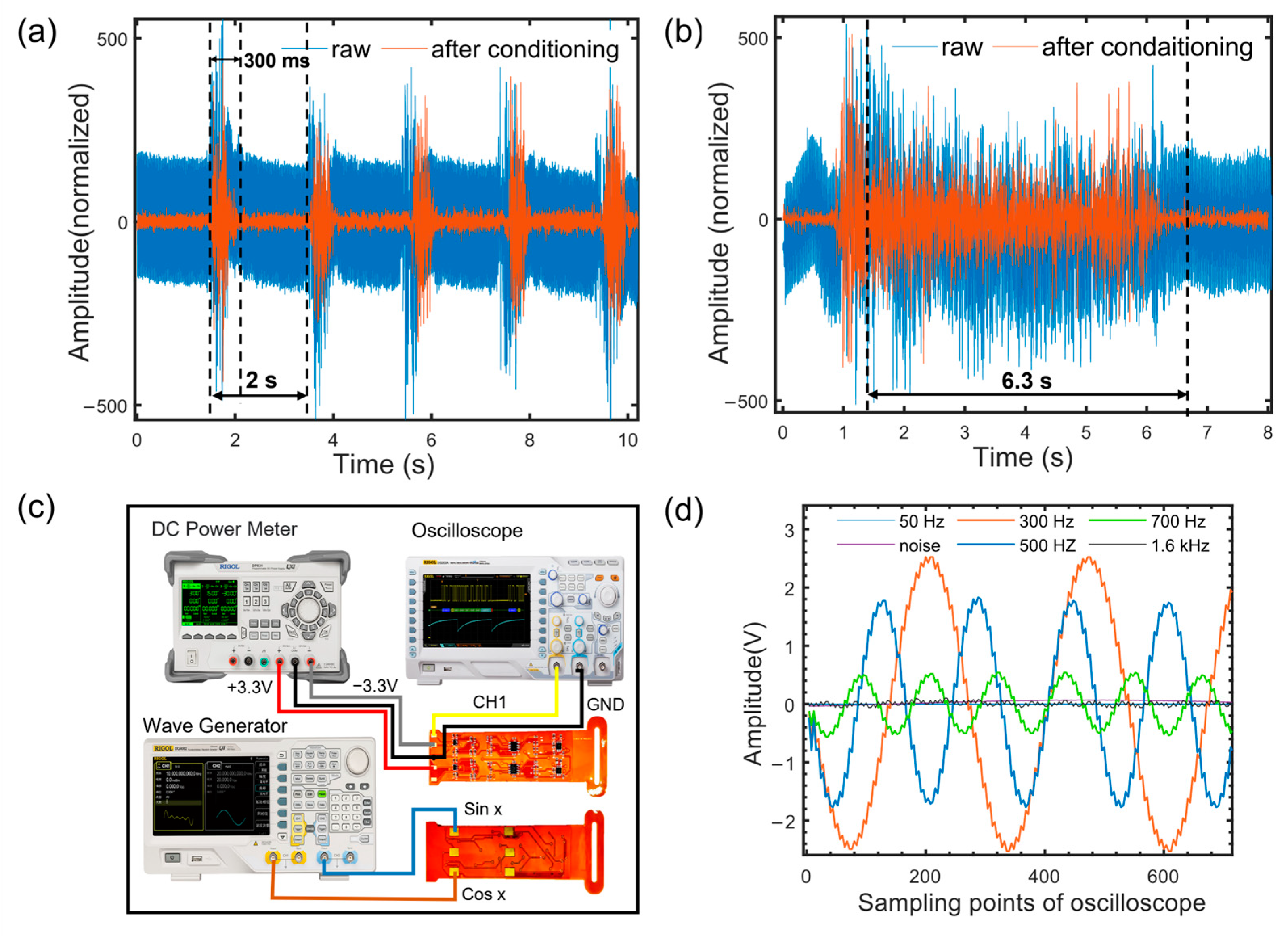
3.1. System Characterization
3.1.1. sEMG Signal Acquisition Unit
3.1.2. BLE Communication Performance
3.1.3. Current Consumption
3.1.4. System Design Results
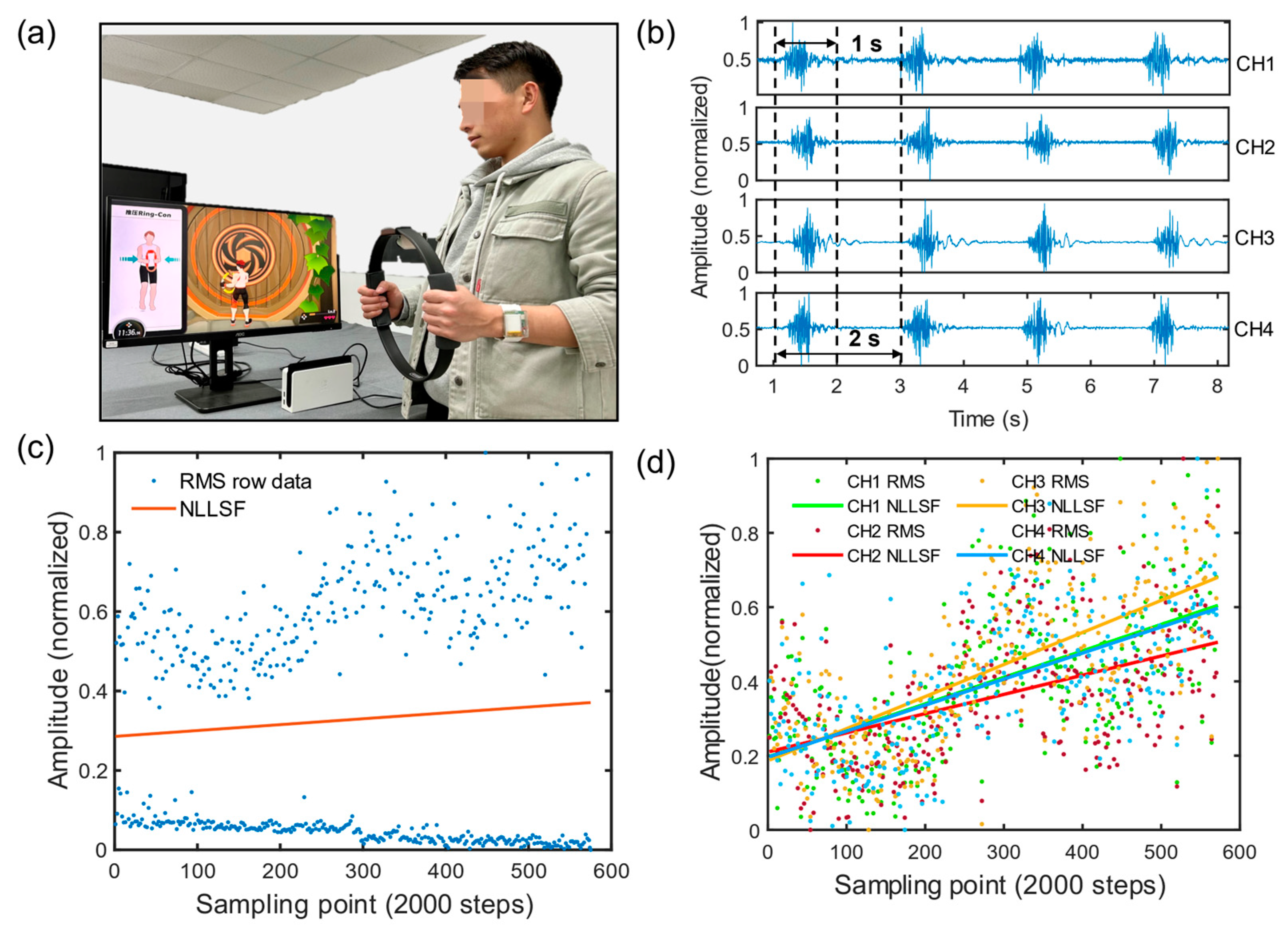
3.2. System Applications
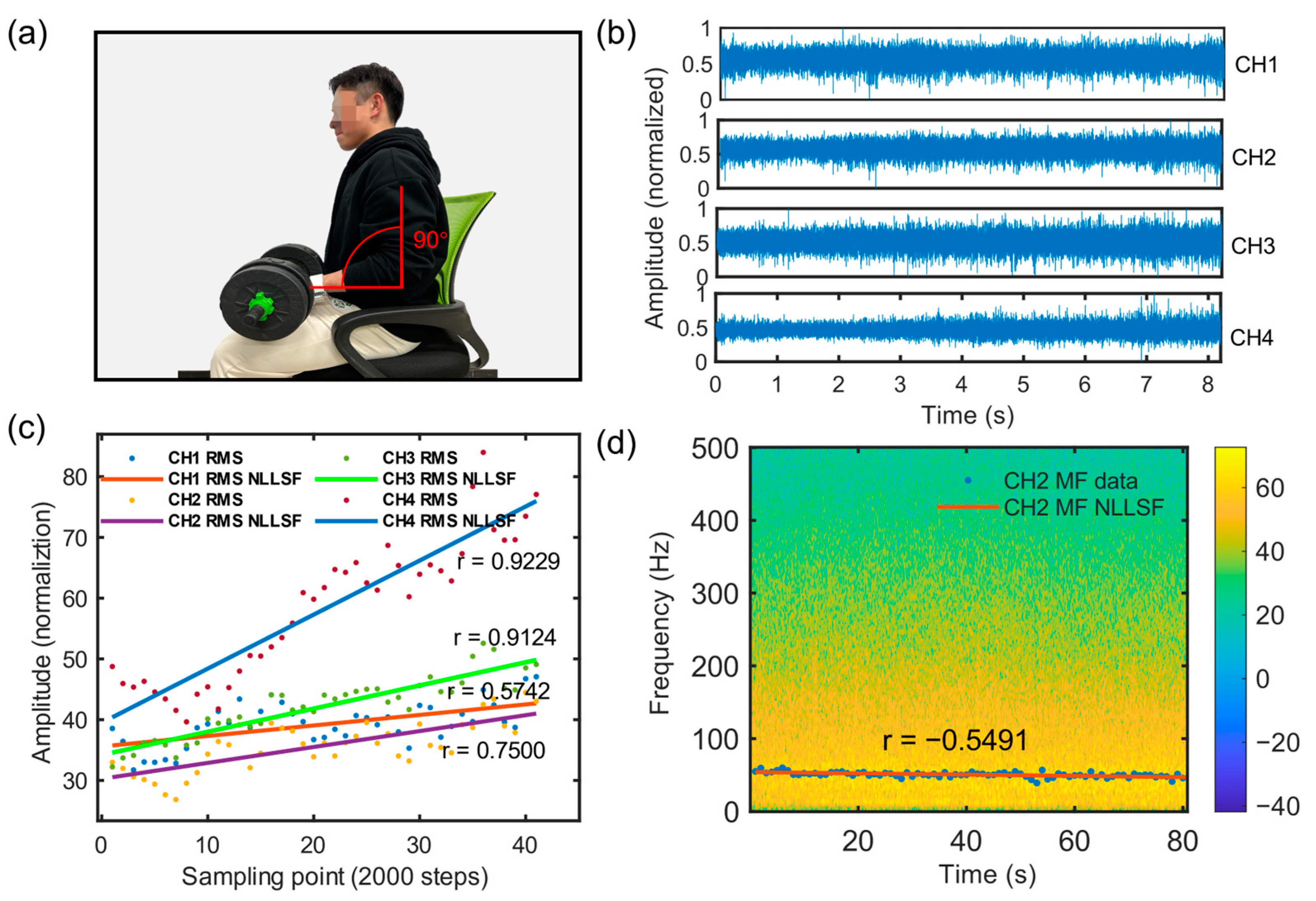
3.2.1. Fatigue Detection
- (1)
- Dynamic contractions
- (2)
- Constant length (static) muscle contractions
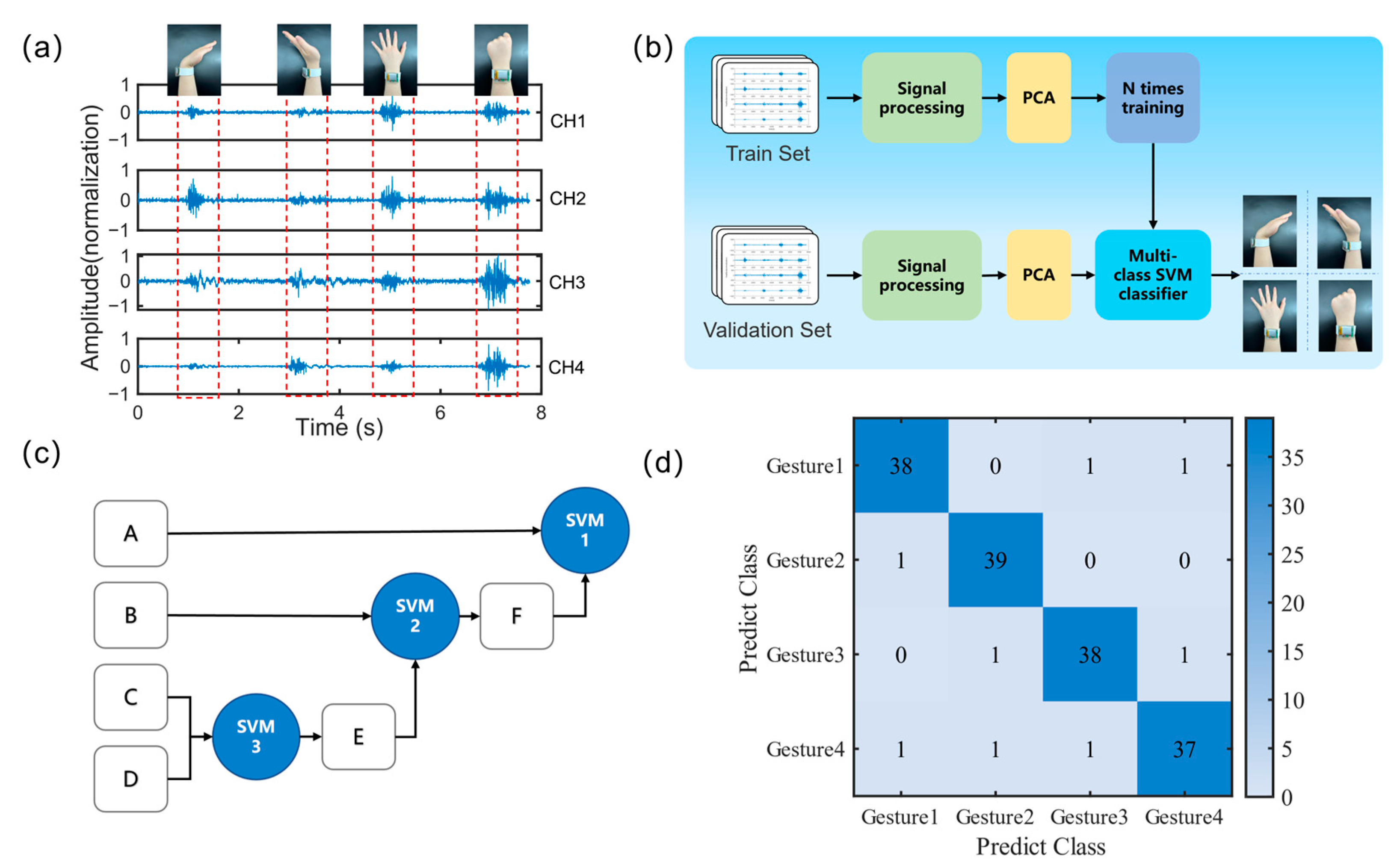
3.2.2. Gesture Recognition
4. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Mongardi, A.; Ros, P.M.; Rossi, F.; Roch, M.R.; Martina, M.; Demarchi, D. A low-power embedded system for real-time sEMG based event-driven gesture recognition. In Proceedings of the 2019 26th IEEE International Conference on Electronics, Circuits and Systems (ICECS), Genova, Italy, 27–29 November 2019; pp. 65–68. [Google Scholar]
- Orjuela-Cañón, A.D.; Ruíz-Olaya, A.F.; Forero, L. Deep neural network for EMG signal classification of wrist position: Preliminary results. LA-CCI. In Proceedings of the 2017 IEEE Latin American Conference on Computational Intelligence (LA-CCI), Arequipa, Peru, 8–10 November 2017; pp. 1–5. [Google Scholar]
- Xiong, D.; Zhang, D.; Zhao, X.; Zhao, Y. Continuous human gait tracking using sEMG signals. In Proceedings of the 2020 42nd Annual International Conference of the IEEE Engineering in Medicine & Biology Society (EMBC), Montreal, QC, Canada, 20–24 July 2020; pp. 3094–3097. [Google Scholar]
- Zhang, F.; Li, P.; Hou, Z.G.; Lu, Z.; Chen, Y.; Li, Q.; Tan, M. sEMG-based continuous estimation of joint angles of human legs by using BP neural network. Neurocomputing 2012, 78, 139–148. [Google Scholar] [CrossRef]
- Deng, Z.; Zhang, X.; Chen, X.; Chen, X.; Chen, X.; Yin, E. Silent speech recognition based on surface electromyography using a few electrode sites under the guidance from high-density electrode arrays. IEEE Trans. Instrum. Meas. 2023, 72, 1–11. [Google Scholar] [CrossRef]
- Jiang, S.; Kang, P.; Song, X.; Lo, B.P.; Shull, P.B. Emerging wearable interfaces and algorithms for hand gesture recognition: A survey. IEEE Rev. Biomed. Eng. 2021, 15, 85–102. [Google Scholar] [CrossRef] [PubMed]
- Strzecha, K.; Krakós, M.; Więcek, B.; Chudzik, P.; Tatar, K.; Lisowski, G.; Mosorov, V.; Sankowski, D. Processing of EMG signals with high impact of power line and cardiac interferences. Appl. Sci. 2021, 11, 4625. [Google Scholar] [CrossRef]
- Fang, C.; He, B.; Wang, Y.; Cao, J.; Gao, S. EMG-centered multisensory based technologies for pattern recognition in rehabilitation: State of the art and challenges. Biosensors 2020, 10, 85. [Google Scholar] [CrossRef]
- Tepe, C.; Erdim, M. Classification of EMG Finger Data Acquired with Myo Armband. In Proceedings of the 2020 International Congress on Human-Computer Interaction, Optimization and Robotic Applications (HORA), Ankara, Turkey, 26–28 June 2020; pp. 1–4. [Google Scholar]
- Li, J.; Ma, Y.; Huang, D.; Wang, Z.; Zhang, Z.; Ren, Y.; Hong, M.; Chen, Y.; Li, T.; Shi, X.; et al. High-performance flexible microneedle array as a low-impedance surface Biopotential dry Electrode for wearable electrophysiological recording and polysomnography. Nano-Micro Lett. 2022, 14, 132. [Google Scholar] [CrossRef]
- Tian, X.; Lee, P.M.; Tan, Y.J.; Wu, T.L.Y.; Yao, H.; Zhang, M.; Li, Z.; Ng, K.A.; Tee, B.C.K.; Ho, J.S. Wireless body sensor networks based on metamaterial textiles. Nat. Electron. 2019, 2, 243–251. [Google Scholar] [CrossRef]
- Yang, M.; Wu, J.; Jiang, W.; Hu, X.; Iqbal, M.I.; Sun, F. Bioinspired and Hierarchically Textile-Structured Soft Actuators for Healthcare Wearables. Adv. Funct. Mater. 2023, 33, 2210351. [Google Scholar] [CrossRef]
- Zheng, L.; Zhu, M.; Wu, B.; Li, Z.; Sun, S.; Wu, P. Conductance-stable liquid metal sheath-core microfibers for stretchy smart fabrics and self-powered sensing. Sci. Adv. 2021, 7, eabg4041. [Google Scholar] [CrossRef]
- Bai, D.; Liu, T.; Han, X.; Yi, H. Application research on optimization algorithm of sEMG gesture recognition based on light CNN+ LSTM model. Cyborg Bionic Syst. 2021, 2020, 9794610. [Google Scholar] [CrossRef]
- Yamanoi, Y.; Togo, S.; Jiang, Y.; Yokoi, H. Learning data correction for myoelectric hand based on “survival of the fittest”. Cyborg Bionic Syst. 2021, 2021, 9875814. [Google Scholar] [CrossRef] [PubMed]
- Jiang, S.; Lv, B.; Guo, W.; Zhang, C.; Wang, H.; Sheng, X.; Shull, P.B. Feasibility of wrist-worn, real-time hand, and surface gesture recognition via sEMG and IMU sensing. IEEE Trans. Ind. Inform. 2017, 14, 3376–3385. [Google Scholar] [CrossRef]
- Mu, D.; Li, F.; Yu, L.; Du, C.; Ge, L.; Sun, T. Study on exercise muscle fatigue based on sEMG and ECG data fusion and temporal convolutional network. PLoS ONE 2022, 17, e0276921. [Google Scholar] [CrossRef] [PubMed]
- Guo, W.; Sheng, X.; Zhu, X. Assessment of muscle fatigue based on motor unit firing, muscular vibration and oxygenation via hybrid mini-grid sEMG, MMG, and NIRS sensing. IEEE Trans. Instrum. Meas. 2022, 71, 1–10. [Google Scholar] [CrossRef]
- Zhang, X.; Tang, X.; Zhu, X.; Gao, X.; Chen, X.; Chen, X. A regression-based framework for quantitative assessment of muscle spasticity using combined EMG and inertial data from wearable sensors. Front. Neurosci. 2019, 13, 398. [Google Scholar] [CrossRef]
- Ying, S.; Wang, L.; Zhao, Y.; Ma, M.; Ding, Q.; Xie, J.; Yao, D.; Mitra, S.; Chen, M.; Liu, T. A novel in-home sleep monitoring system based on fully integrated multichannel front-end chip and its multilevel analyses. IEEE J. Transl. Eng. Health Med. 2023, 11, 211–222. [Google Scholar] [CrossRef]
- Gao, S.; Gong, J.; Chen, B.; Zhang, B.; Luo, F.; Yerabakan, M.O.; Pan, Y.; Hu, B. Use of advanced materials and artificial intelligence in electromyography signal detection and interpretation. Adv. Intell. Syst. 2022, 4, 2200063. [Google Scholar] [CrossRef]
- Laferriere, P.; Lemaire, E.D.; Chan, A.D. Surface electromyographic signals using dry electrodes. IEEE Trans. Instrum. Meas. 2011, 60, 3259–3268. [Google Scholar] [CrossRef]
- Chu, J.U.; Moon, I.; Kim, S.K.; Mun, M.S. Control of multifunction myoelectric hand using a real-time EMG pattern recognition. In Proceedings of the 2005 IEEE/RSJ International Conference on Intelligent Robots and Systems, Edmonton, AB, Canada, 2–6 August 2005; pp. 3511–3516. [Google Scholar]
- Li, G.; Li, Y.; Yu, L.; Geng, Y. Conditioning and sampling issues of EMG signals in motion recognition of multifunctional myoelectric prostheses. Ann. Biomed. Eng. 2011, 39, 1779–1787. [Google Scholar] [CrossRef]
- Jiang, N.; Guo, A.; Lei, Q.; Wang, Z. Design of low-noise multi-channel active surface electromyography acquisition equipment. In Proceedings of the 2022 19th China International Forum on Solid State Lighting & 2022 8th International Forum on Wide Bandgap Semiconductors (SSLCHINA: IFWS), Suzhou, China, 7–10 February 2023; IEEE: Piscataway Township, NJ, USA, 2023; pp. 281–284. [Google Scholar]
- Roland, T.; Wimberger, K.; Amsuess, S.; Russold, M.F.; Baumgartner, W. An insulated flexible sensor for stable electromyography detection: Application to prosthesis control. Sensors 2019, 19, 961. [Google Scholar] [CrossRef]
- Landau, H.J. Sampling, data transmission, and the Nyquist rate. Proc. IEEE 1967, 55, 1701–1706. [Google Scholar] [CrossRef]
- Zumbahlen, H. Linear Circuit Design Handbook; Newnes: Oxford, UK, 2011. [Google Scholar]
- Jiang, S.; Lv, B.; Sheng, X.; Zhang, C.; Wang, H.; Shull, P.B. Development of a real-time hand gesture recognition wristband based on sEMG and IMU sensing. In Proceedings of the 2016 IEEE International Conference on Robotics and Biomimetics (ROBIO), Qingdao, China, 3–7 December 2016; pp. 1256–1261. [Google Scholar]
- Liu, X.; Sacks, J.; Zhang, M.; Richardson, A.G.; Lucas, T.H.; Van der Spiegel, J. The virtual trackpad: An electromyography-based, wireless, real-time, low-power, embedded hand-gesture-recognition system using an event-driven artificial neural network. IEEE Trans. Circuits Syst. II 2017, 64, 1257–1261. [Google Scholar] [CrossRef]
- Benatti, S.; Casamassima, F.; Milosevic, B.; Farella, E.; Schönle, P.; Fateh, S.; Burger, T.; Huang, Q.; Benini, L. A versatile embedded platform for EMG acquisition and gesture recognition. IEEE Trans. Biomed. Circuits Syst. 2015, 9, 620–630. [Google Scholar] [CrossRef] [PubMed]
- Cifrek, M.; Medved, V.; Tonković, S.; Ostojić, S. Surface EMG based muscle fatigue evaluation in biomechanics. Clin. Biomech. 2009, 24, 327–340. [Google Scholar] [CrossRef]
- Shin, S.; Tafreshi, R.; Langari, R. A performance comparison of hand motion EMG classification. In Proceedings of the 2nd Middle East Conference on Biomedical Engineering, Doha, Qatar, 17–20 February 2014; pp. 353–356. [Google Scholar]
- Khushaba, R.N.; Al-Timemy, A.H.; Al-Ani, A.; Al-Jumaily, A. A framework of temporal-spatial descriptors-based feature extraction for improved myoelectric pattern recognition. IEEE Trans. Neural Syst. Rehabil. Eng. 2017, 25, 1821–1831. [Google Scholar] [CrossRef]
- Xu, H.; Xiong, A. Advances and disturbances in sEMG-based intentions and movements recognition: A review. IEEE Sens. J. 2021, 21, 13019–13028. [Google Scholar] [CrossRef]
- Li, W.; Shi, P.; Yu, H. Gesture recognition using surface electromyography and deep learning for prostheses hand: State-of-the-art, challenges, and future. Front. Neurosci. 2021, 15, 621885. [Google Scholar] [CrossRef] [PubMed]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| State | sEMG Signal Conditioner | ADC | MCU | BLE | Total |
|---|---|---|---|---|---|
| Working | 33 | 100 | 66 | 23.1 | 222.1 |
| Dormant | 0 | 40 | 6.9 | 4 | 50.9 |
| Description | [1] | [29] | [30] | [31] | This Work |
|---|---|---|---|---|---|
| Number of channels | 3 | 4 | 4 | 8 | 4 |
| Site of collection | forearm | wrist | forearm | forearm | wrist |
| Bandwidth | 34~398 Hz | 20~450 Hz | 9.57~511 Hz | 60~450 Hz | 15~500 Hz |
| Gain | 922 V/V | 500 V/V | 1995 V/V | - | 2492 V/V |
| A/D Resolution | 14-bit | 16-bit | 12-bit | 12-bit | 16-bit |
| Sampling frequency | - | 1 kHz | 1.6 kHz | 500 Hz | 2 kHz |
| Communication | Wire | Bluetooth | Wi-Fi | Bluetooth | Bluetooth |
| Max. transmission distance | - | - | 5 m | - | 12 m |
| Power supply | Battery | Battery | Battery | Battery | Battery |
| Dimensions | - | 15 mm × 44 mm | 34 mm × 25 mm | 85 mm × 50 mm × 6 mm | 30 mm × 120 mm × 5 mm (Wristband) 45 mm × 36 mm × 12 mm (Core PCB) |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liang, Z.; Wang, X.; Guo, J.; Ye, Y.; Zhang, H.; Xie, L.; Tao, K.; Zeng, W.; Yin, E.; Ji, B. A Wireless, High-Quality, Soft and Portable Wrist-Worn System for sEMG Signal Detection. Micromachines 2023, 14, 1085. https://doi.org/10.3390/mi14051085
Liang Z, Wang X, Guo J, Ye Y, Zhang H, Xie L, Tao K, Zeng W, Yin E, Ji B. A Wireless, High-Quality, Soft and Portable Wrist-Worn System for sEMG Signal Detection. Micromachines. 2023; 14(5):1085. https://doi.org/10.3390/mi14051085
Chicago/Turabian StyleLiang, Zekai, Xuanqi Wang, Jun Guo, Yuanming Ye, Haoyang Zhang, Liang Xie, Kai Tao, Wen Zeng, Erwei Yin, and Bowen Ji. 2023. "A Wireless, High-Quality, Soft and Portable Wrist-Worn System for sEMG Signal Detection" Micromachines 14, no. 5: 1085. https://doi.org/10.3390/mi14051085
APA StyleLiang, Z., Wang, X., Guo, J., Ye, Y., Zhang, H., Xie, L., Tao, K., Zeng, W., Yin, E., & Ji, B. (2023). A Wireless, High-Quality, Soft and Portable Wrist-Worn System for sEMG Signal Detection. Micromachines, 14(5), 1085. https://doi.org/10.3390/mi14051085