The purpose of this work is to highlight the importance of modeling soft materials used for the fabrication of microfluidic channels, as solid and dissipating ones, to fully assess the acoustofluidic phenomenon in terms of wave transfer to the fluid.
To investigate the generation, propagation, and transmission of the SAWs to the fluid, a time-dependent analysis was first performed. Then, a parametric analysis in the frequency domain has been performed by varying the thickness and width of the microchannel, namely the vertical and horizontal dimensions of the fluid domain, to estimate the sensitivity of the acoustic pressure field to geometrical imperfections that could arise in the fabrication process. The effect of the PDMS response on the wave pattern transmitted to the fluid has been finally inspected to understand the possible interaction between pressure waves and microparticles.
3.1. Generation, Propagation and Transmission of SAWs
The frequency
of the AC signal to be applied to the IDT electrodes has to induce the Rayleigh waves in the lithium niobate. The theory of Rayleigh waves propagation was thoroughly discussed in [
55,
56] and is not further reported here.
As lithium niobate is an anisotropic material, the specific velocity of waves traveling in the direction perpendicular to the longitudinal axis of the channel has been considered. A frequency domain analysis has been performed by varying
between 12 MHz and 13 MHz to account for the effects of anisotropy on
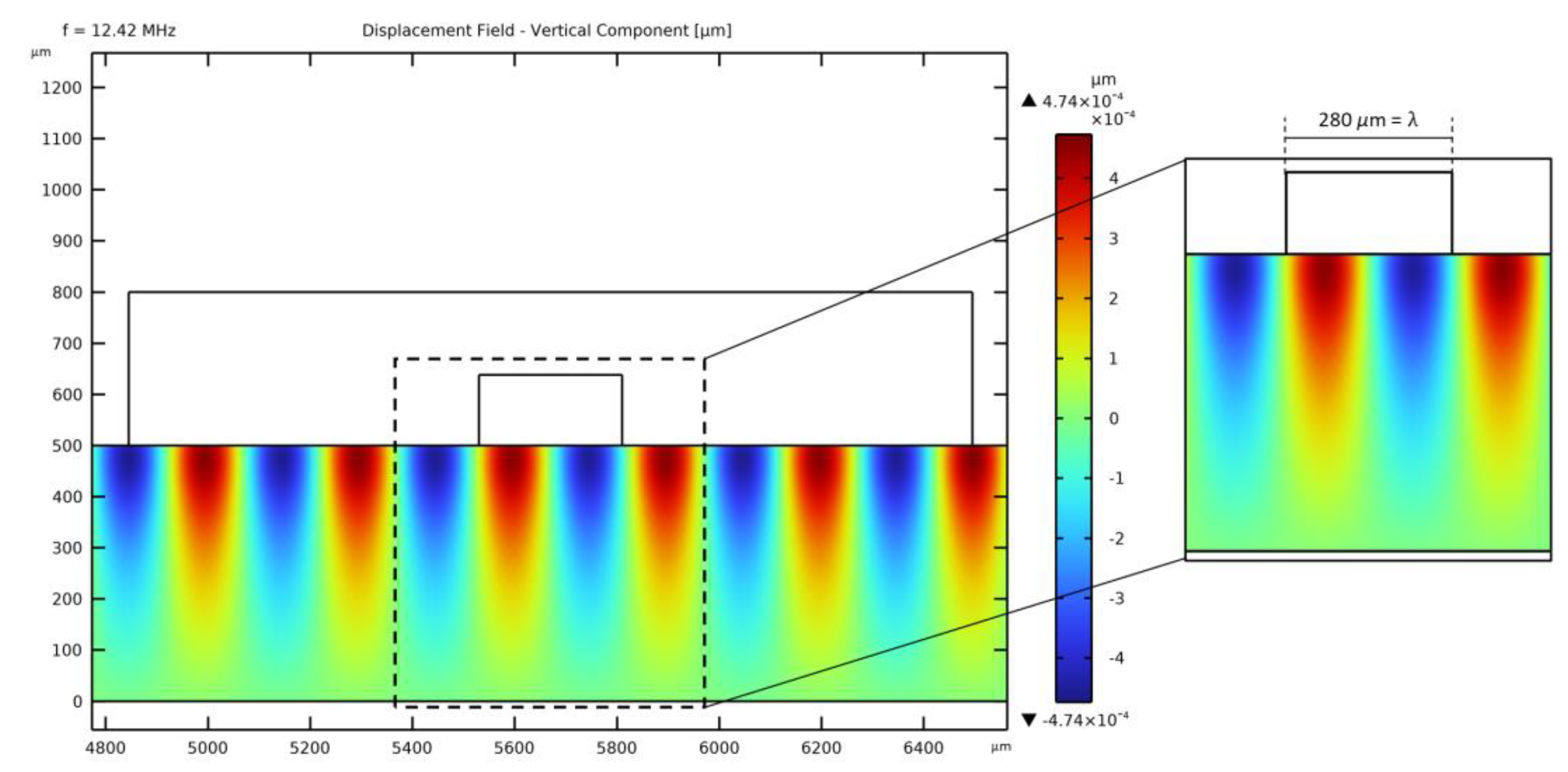
and find the correct actuation frequency for the model geometry. The selected frequency, as obtained from the analysis, is
= 12.42 MHz, as also induced by the constructive interference between the opposite TSAWs. In
Figure 2, the SSAW in the region of the microchannel is plotted. The wavelength
λSAW is assured to be around 280
μm as it fits the width of the fluid domain. The wavelength of the SSAW is the same as that of the traveling waves since they are both actuated at the same frequency
, and the sources are placed an integer multiple of
λSAW away from each other.
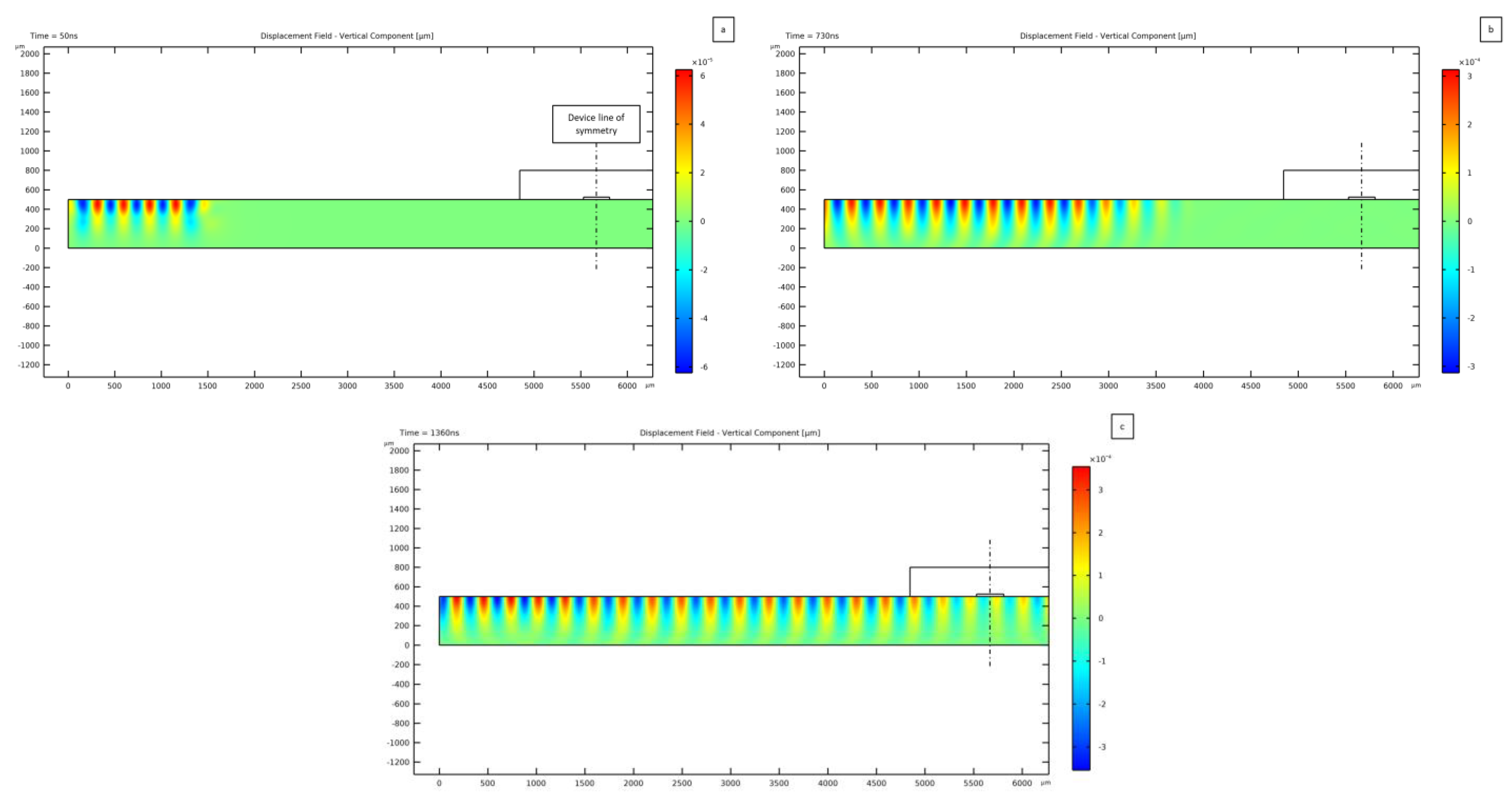
Having defined the actuation frequency, time domain analyses have been run with the voltage applied to the electrodes harmonically varying in time between −8 V and 8 V. The generation through the inverse piezoelectric effect and the following propagation of the TSAW at the lithium niobate surface at three different instants after the beginning of actuation are shown in
Figure 3. As soon as the IDTs are actuated, the surface waves are triggered below the electrodes (
Figure 3a) and then travel across the device cross-section (
Figure 3b) to finally meet with the other counter-propagating TSAW (
Figure 3c), leading to the reported SSAW solution around the channel. The plots show that the Rayleigh wave is characterized by the largest (vertical) displacements at the top free surface of the substrate; moving downwards, the wave is reduced in amplitude till vanishing at a distance
≅ 1.5
= 320
μm away from the surface, where only 10% of the maximum wave amplitude survives. As far as the design of the entire device is concerned, the adopted thickness of the piezoelectric substrate needs to be larger than this distance to ensure that possible negative interference effects are not generated by the boundary conditions at the bottom surface of the substrate itself. To completely avoid the interference of reflected waves from the bottom surface of the substrate, low-reflecting boundary conditions have been applied.
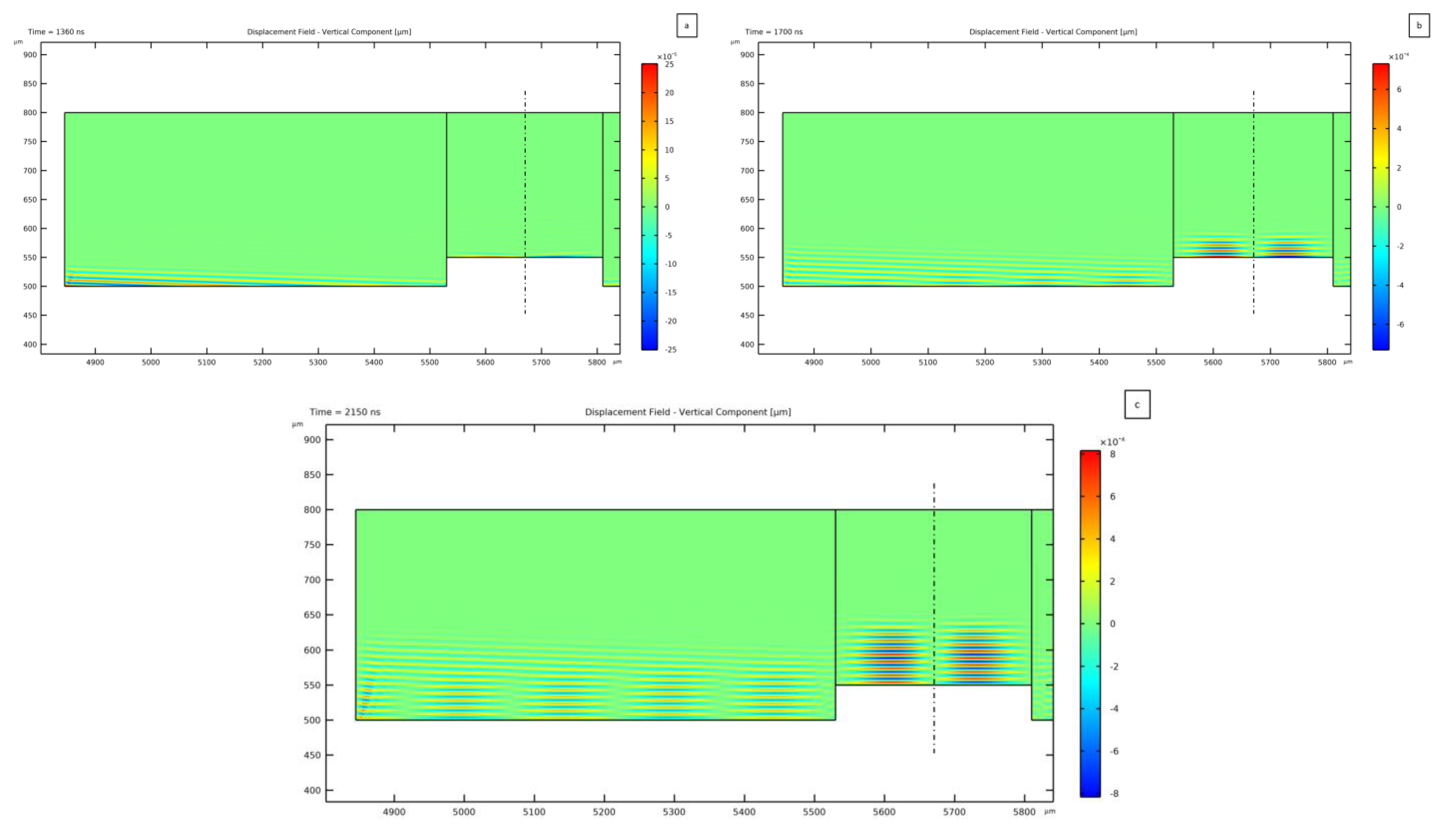
This time-dependent analysis has been exploited to also assess the transmission of the TSAWs to the PDMS microchannel and to the fluid. In
Figure 4, the solution relevant to three successive time steps is reported to show the wave propagation in the PDMS. Initially, the TSAW reaches the PDMS and starts transmitting vibrations inside it. This step is reported in
Figure 4a, where the direction of the wave tilted by the Rayleigh angle can be seen. Then, when the two counter-propagating TSAWs start interacting to develop the SSAW, the distribution of the lithium niobate surface wave is reflected in the PDMS;
Figure 4b,c report this resulting solution. As can be seen, the region of PDMS above the microchannel shows a vertical propagation of the waves, featuring a zero displacement location at the symmetry line of the device. This effect also results in the distribution of the pressure wave generated inside the fluid, where a pressure node is formed. In the lateral regions of the PDMS, the transmitted wave is instead tilted with respect to the vertical direction. This effect is caused by the propagation of the TSAWs, which move vertically on the substrate surface while propagating in the horizontal direction: this is the reason why the standing acoustic field requires some time to be generated and completely developed.
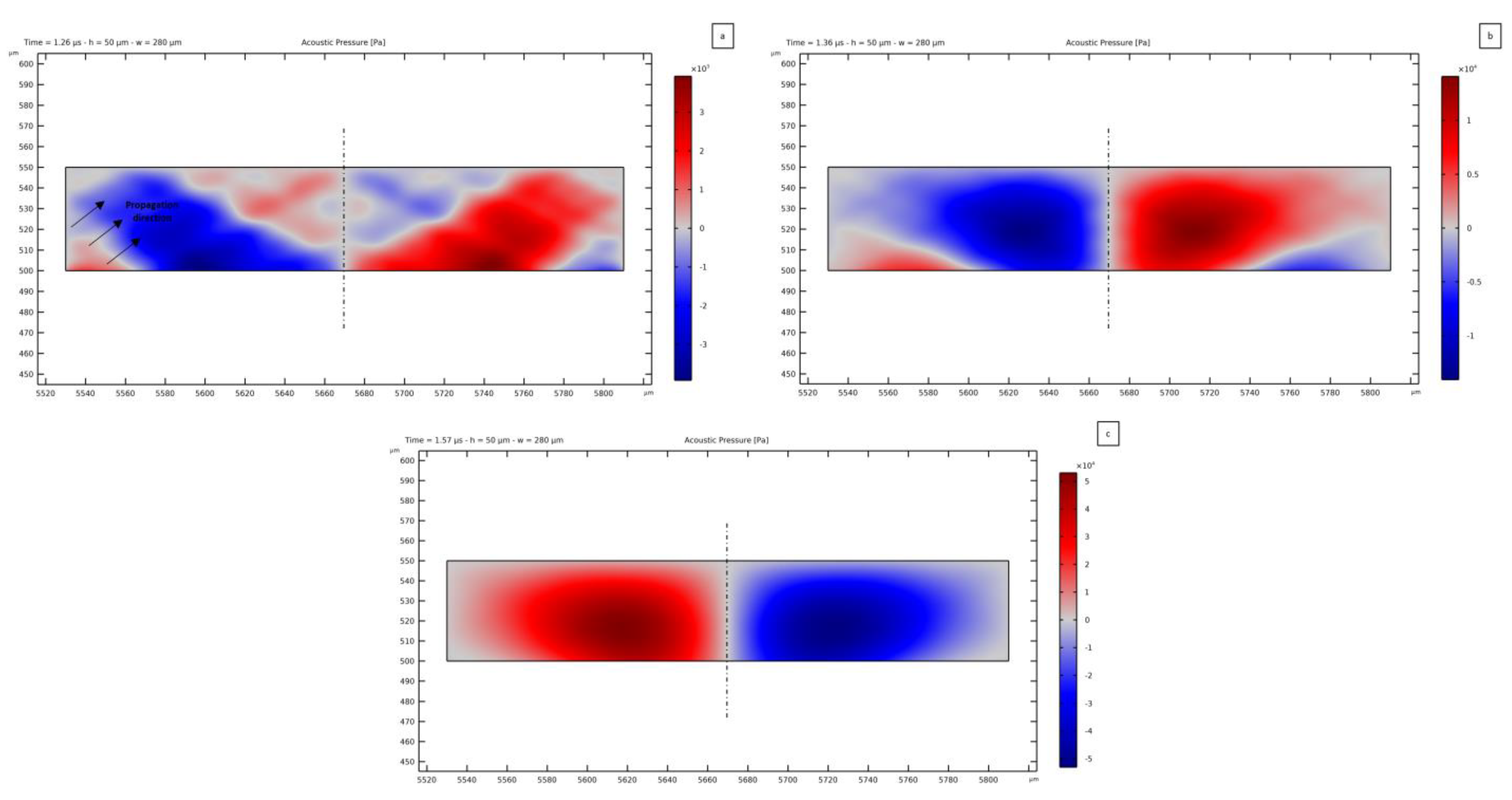
As a result of the analysis, the transmission of the TSAWs to the fluid in the microchannel is computed. In
Figure 5, the leaky SAW phenomenon is shown for three successive time steps of the standing acoustic wave generation. The Rayleigh angle of propagation of the pressure waves inside the fluid can be seen, highlighted by arrows in
Figure 5a. The magnitude of the pressure field is initially 0.18 Pa at the activation of the voltage signal input, which is very low with respect to the expected value on the order of 10
4 Pa for a standing pressure wave. This value increases due to the transmission of an SSAW generated by the constructive interference of the two counter-propagating waves (
Figure 5b), and the pressure field in the fluid domain then reaches the expected amplitude after 1.57
μs (
Figure 5c) the beginning of actuation. The pressure amplitude can obviously be increased by increasing the value of the voltage applied to the IDTs. From
Figure 5 it is clear that the acoustic pressure wave is generated in the fluid as a combination of the vertical motion due to the SAWs and their horizontal propagation. Therefore, the transmission of the waves results tilted with respect to the vertical direction, becoming vertical with the development of the SSAW at the end of the interaction between the two opposite TSAWs (see
Figure 5c).
3.2. Pressure Field Sensitivity Analysis: Impact of Channel Thickness
Through the formerly described time-dependent analysis, the potential effect of the acoustofluidic interaction has been assessed.
Then, a parametric analysis has been run in the frequency domain by varying the thickness and width of the fluid domain. Specifically, the thickness has been varied between 5 μm and 150 μm with a step of 1 μm, while the width has been varied between 140 μm and 420 μm with a step of 1 μm. The thickness and width of the PDMS domain have instead been kept fixed to the values presented at the beginning of this section.
The goal of this investigation is to establish anomalies in the development of the standing pressure acoustic field caused by the interaction between the waves in the solid elastic PDMS and the fluid domain contained in the microchannel. This undesired effect can be studied, detected, and avoided in device fabrication using PDMS as a molding material.
Moving from the work in [
45], the PDMS has been modeled as a linear elastic solid material. This material behavior seems to provide more accurate results if compared to non-flowing fluid modeling; in fact, in this latter case, the continuity of the pressure wave between the fluid and PDMS is imposed to allow wave transmission. In a real device, the vibration of the piezoelectric substrate is transmitted to the material of the microchannel structure, which also constrains the waves along its two lateral surfaces. The aforementioned anomalies could not be reported by modeling the PDMS as a fluid due to the missing acoustic-mechanics coupling between the fluid and the PDMS.
The figures in this section and the following ones report the acoustic pressure field within the fluid domain contained in the microchannel. The reference frame is different in each figure in order to fit the whole domain into the frame itself and highlight details of the solutions. Regarding the geometry of the channel, in this sub-section, the only dimension that is modified is the thickness of the fluid domain, keeping the width fixed to . In the next sub-section, different widths are considered for only two values of thickness: 50 μm and 138 μm.
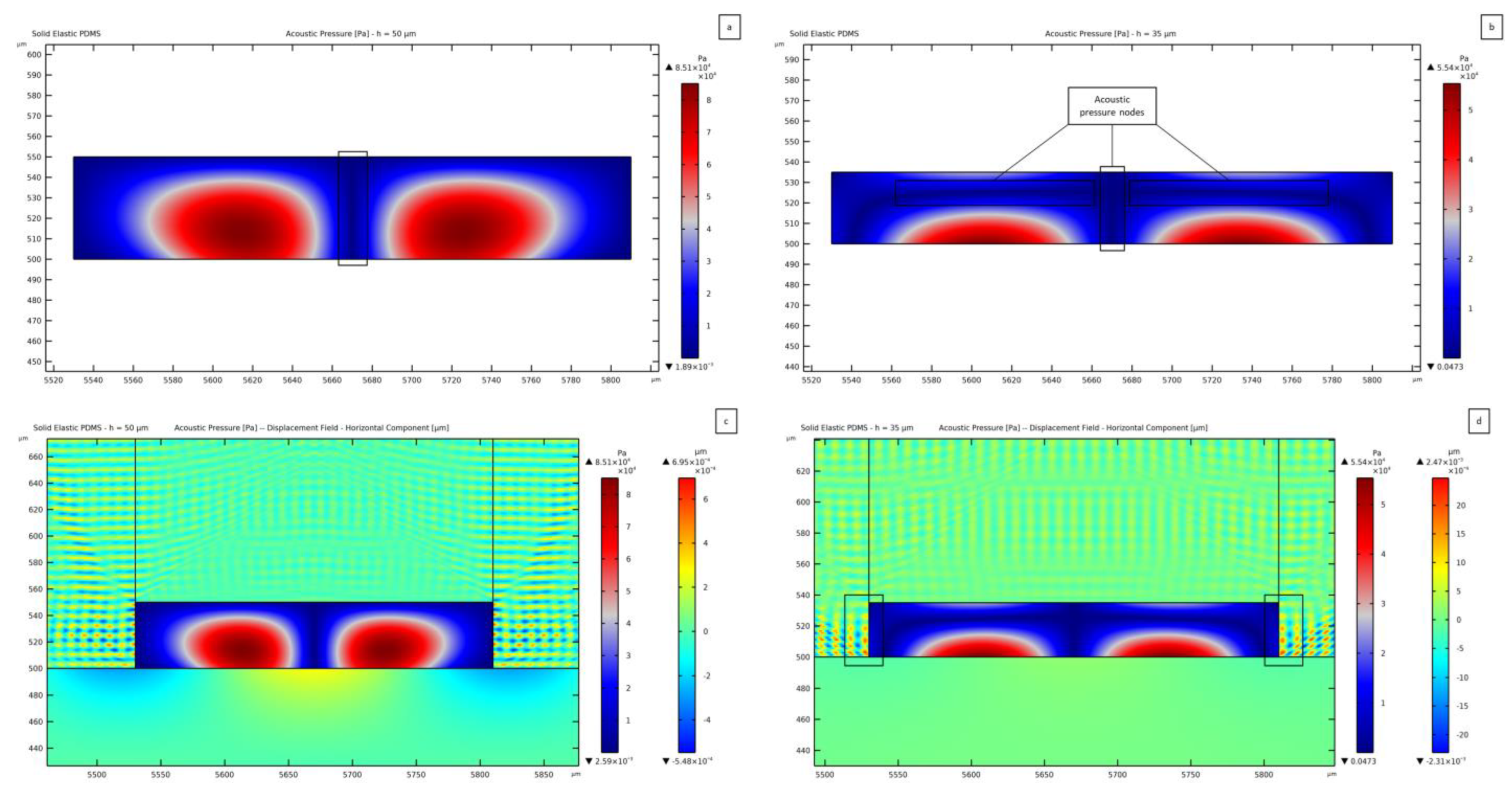
In
Figure 6, the standing pressure fields related to different thicknesses of the microchannel (namely 35
μm and 50
μm) are reported.
The goal being a one-to-one link between the SSAW and the pressure wave in the fluid domain, the width of the channel must be equal to the SAW wavelength
to display two antinodes at the lateral sides of the fluid domain, placed symmetrically alongside one single node at mid-width. In
Figure 6 and those to follow, the red regions of the standing pressure wave plots represent the antinodes, while the dark blue regions correspond to the pressure nodes, which are also highlighted by black boxes. These spots are expected to be the attractors of PS microparticles, as caused by the acoustic pressure. In
Figure 6a, showing the results relevant to the 50
μm thick channel, the driving force will push the PS particles towards the field nodes; therefore, the pressure distribution is expected to move the particles from the two lateral sides of the channel towards the central region. An anomalous solution can be instead recognized in
Figure 6b, which is associated with a PDMS vibration at the top and lateral channel walls that leads to contributions to the pressure waves coming from all the boundaries, see
Figure 6d. This solution is characterized by the central pressure node transmitted from the underlying SSAW and also by lateral antinodes, even though a horizontal pressure node shows up on the upper side of the water domain, at variance with the expected solution. This pressure distribution can cause an undesirable motion of the particles. The same anomalous effect is obtained for a thickness value of 36
μm; for smaller and larger
thickness values, the distribution is in accordance with the one provided by the SSAW, as reported in
Figure 5a. Looking at the maximum and minimum values of pressure, the magnitude turns out to be smaller for the 35
μm thick case with a maximum of 5.54 × 10
4 Pa, which compares to a pressure magnitude of 8.51 × 10
4 Pa in the 50
μm thick case. To stress out how the standing pressure wave distribution is developed within the fluid, a comparison between the horizontal component of the displacement in the PDMS (colored in orange and blue, around the standing pressure wave contained in the rectangular channel) can be considered. The pattern of the PDMS waves in
Figure 6d at the interface between PDMS and water is more regular than the one in
Figure 6c. In the former, a clear horizontal wave (forward-backward motion) can be seen, while in the latter, a clear wave form cannot be distinguished. The PDMS wave reported in
Figure 6d pushes the fluid laterally, causing interference with the contribution coming from the substrate SSAW. As far as the magnitude of the induced displacement field is concerned, the maximum value at the substrate surface (which is directly linked to the SSAW) is around 4.74 × 10
−4 μm, while it amounts to 2.47 × 10
−3 μm as induced by the horizontally moving waves inside the PDMS, for a channel 35
μm thick. The vibrations in the PDMS are thus 5.2 times greater than the SSAW-induced motion in the lithium niobate. The transmission of one pressure wave from the lateral walls of the channel thereby distorts the pressure field.
This first outcome, showing two different standing pressure wave distributions, confirms that secondary pressure waves can be generated from the channel walls and lid. With the term “secondary waves”, reference is made to the waves that are transmitted from the substrate to the PDMS structure to finally interact with the fluid to generate pressure waves. The term secondary is here used to highlight that they propagate from PDMS instead of being the principal SAWs provided by the piezoelectric substrate. In order to observe them, the material covering the microchannel must be modeled as a solid one, allowing the propagation of shear waves within the material, directly interacting with the fluid.
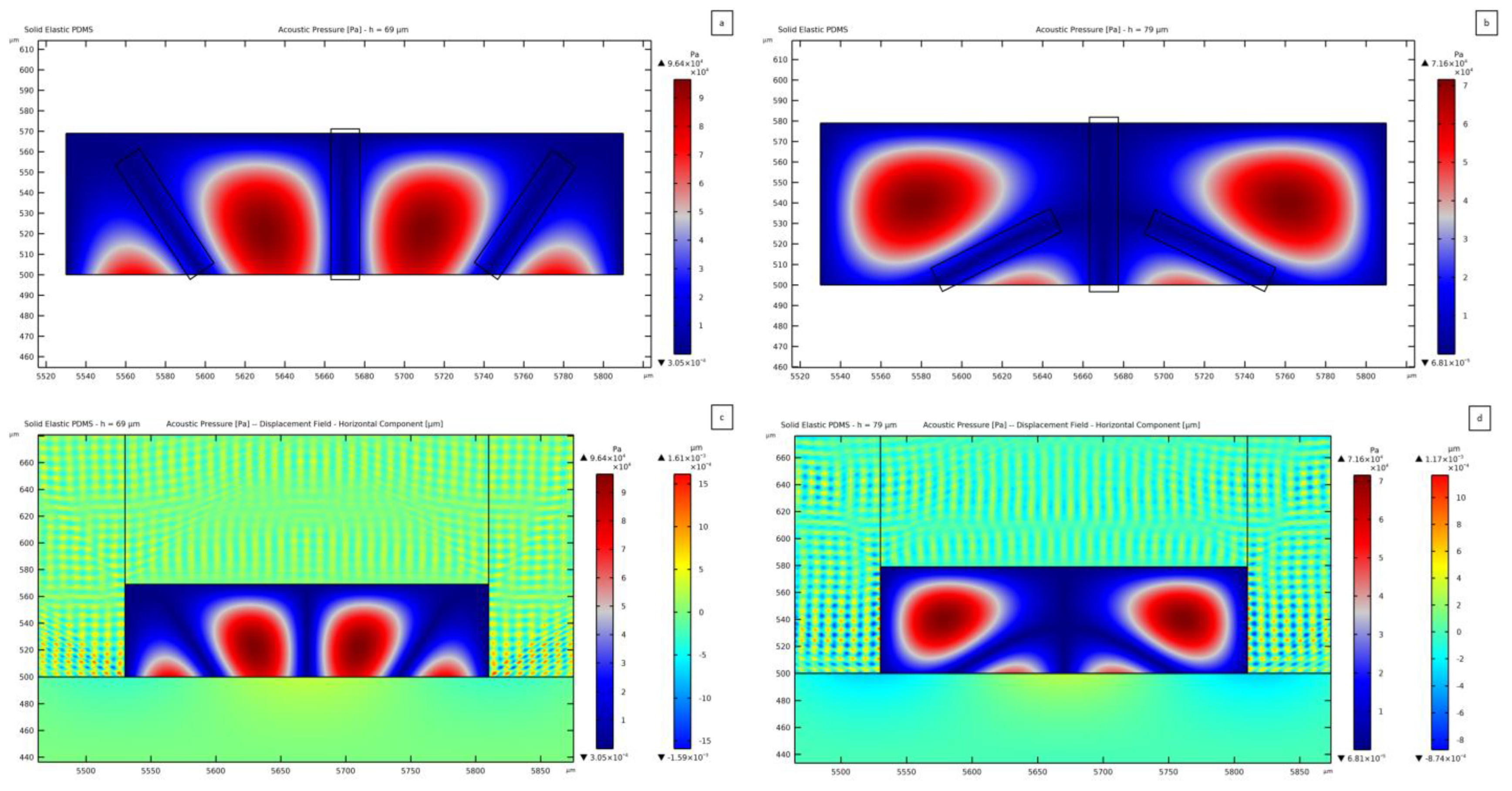
Two other pressure field anomalies are reported in
Figure 7. In these cases, the channel thickness results in being critical as its value is close to
, being
the pressure wavelength in the fluid; hence, another wave antinode shows up in the fluid domain through its thickness. The plot reported in
Figure 7a refers to a microchannel thickness of 69
μm, but similar distributions develop for thickness values in the range between 60
μm and 73
μm. A distinctive feature of this field is represented by the presence of two additional pressure nodes located near the lateral walls of the channel. This effect is caused by the waves impinging upon the fluid and coming from the lateral walls of the PDMS channel, as reported in
Figure 7c, featuring an amplitude 3.4 times greater than the SSAW amplitude. The presence of a second antinode for the pressure field, coming from the substrate motion, is more evident in the solution reported in
Figure 7b, where the additional nodes and antinodes emerge directly from the central region of the channel for a 79
μm thick microchannel. The same type of solution is reported for values of the thickness ranging between 74
μm and 88
μm; larger
values provide again the target pressure distribution, like for the 50
μm case (see
Figure 6a,c). When such a transmission is completely stabilized, a horizontal node can be detected between the two antinodes placed near the top and bottom walls of the channel. On the contrary, with the undesired nodes commented for the previous geometries in
Figure 7, by increasing the thickness over 88
μm, the expected horizontal node in the pressure field is obtained.
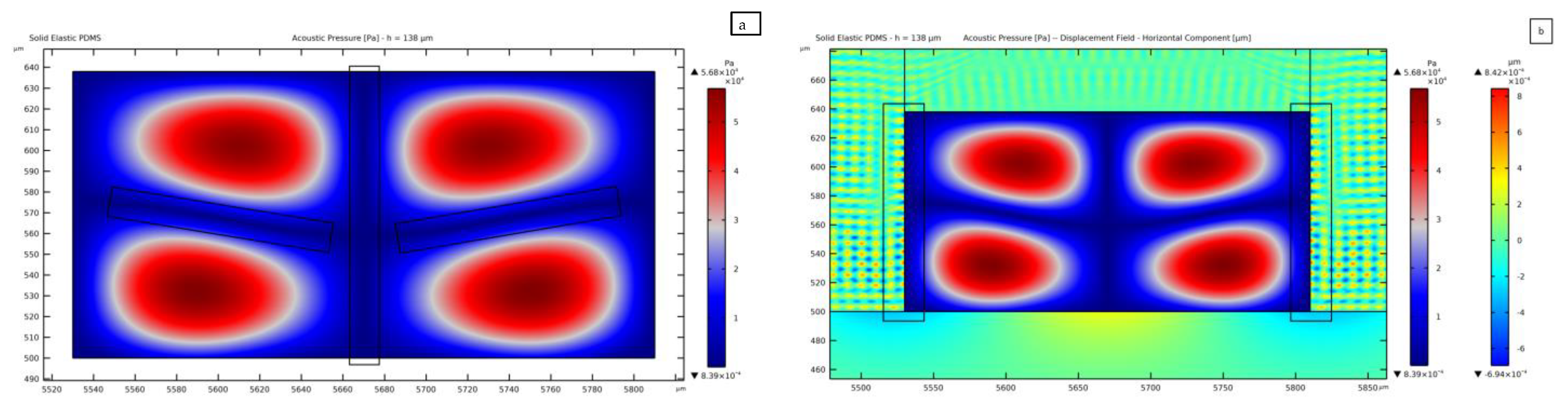
Figure 8 shows the result related to a 138
μm-thick channel. This plot outcome suggests the idea of designing an innovative configuration of SAW devices where two or more SAWs interact so that the pressure field can allow manipulating particles with control of the pressure distribution in the vertical direction. Not only the focusing of the particles to move from the lateral antinodes, but also the manipulation in the direction perpendicular to the propagation of the wave fronts in the piezoelectric substrate could be then achieved. Regarding the amplitude of vibrations in the PDMS, the horizontal component amounts to 8.42 × 10
−4 μm, which is twice the SSAW-driven vertical one in the lithium niobate. This response testifies that a certain threshold, in terms of PDMS displacement magnitude, is necessary to overcome the SSAW contribution for transmitting the pressure wave to the fluid domain. This outcome strengthens the classification of these waves as secondary ones.
The target pressure distribution is obtained if the channel thickness varies between 89 μm and 105 μm, with a symmetric distribution, characterized by one vertical and one horizontal node.
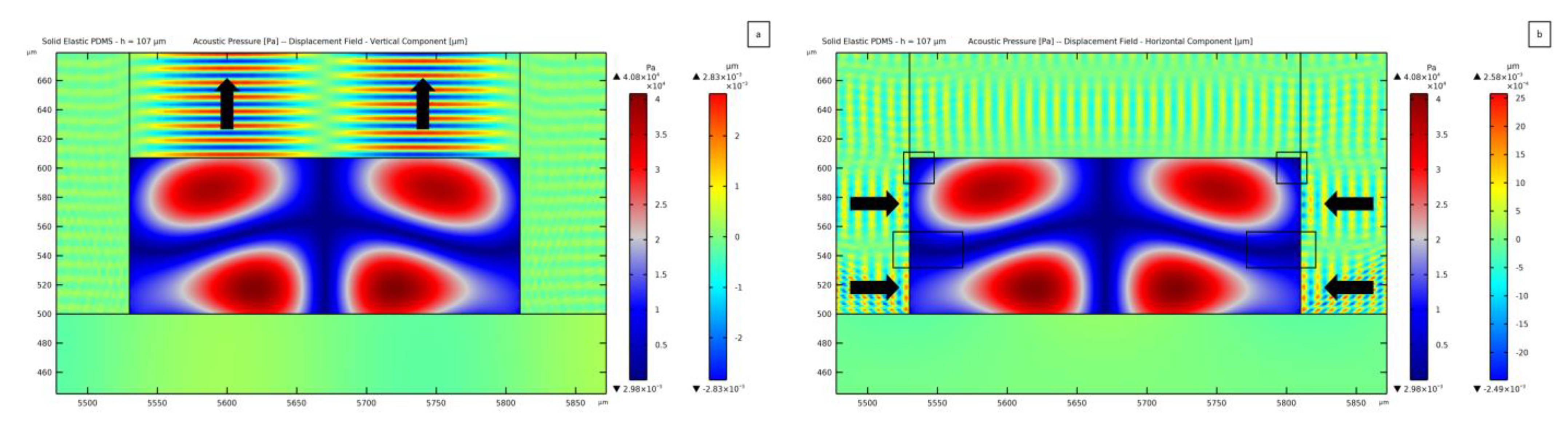
The most severe anomaly in the present investigation is obtained for a channel thickness of 107
μm, see
Figure 9. To explain such a distortion of the pressure field, the vertical (
Figure 9a) and horizontal (
Figure 9b) components of the displacement field in the PDMS structure are reported. Looking at these plots, longitudinal waves inside the solid PDMS can be detected.
Figure 9a shows that the vertical component of these waves moves in the vertical direction, from the substrate surface towards the top lid of the microchannel; the black arrows in the figure provide an indication of the direction of motion of the waves in the PDMS to transmit the pressure wave within the fluid. This result is totally predictable. The principle of SAW-based devices is to exploit the propagation of surface waves to induce a specific response in the system. A similar behavior can be seen in
Figure 9b, regarding the horizontal component of the displacement field. Such secondary waves (as originated from the PDMS and not from the substrate surface) lead to the transmission of pressure waves to the fluid from sources different from the SSAW. The synergic presence of these two motions in the PDMS generates a standing pressure wave field unexpectedly distorted and with a reduced magnitude of 4.08 × 10
4 Pa, as compared to the field reported in
Figure 6a, which features a magnitude of 8.51 × 10
4 Pa. In
Figure 9b, a black box further highlights an interference between the horizontally moving waves in the PDMS, which induces one wavy pressure node in the fluid domain. Due to the limited thickness of the channel, the same effect is partially highlighted close to the top right corner of the channel. The amplitude of the horizontal component of the displacement in this case amounts to 2.58 × 10
−3 μm; therefore, the vibrations in the PDMS are 5.6 times greater than the motion in the lithium niobate. Hence, as stated before, the distortion of the pressure field can be associated with the lateral transmission of pressure waves.
A different PDMS wave excitation can be distinguished in
Figure 8b at the lateral wall of the microchannel if compared to the solution displayed in
Figure 9b. While a forward–backward horizontal motion of the PDMS structure can be recognized in the latter (as for the case reported in
Figure 6d), the shape of the wave near the lateral wall of the channel is slightly different in the former case (as for the case reported in
Figure 6c). The pattern of the PDMS waves in
Figure 9b is more regular than the one in
Figure 8b. This effect is obtained by accounting for the wave damping in the PDMS microchannel structure, as linked to the parameter
. By changing the thickness of the microchannel, the interaction between the horizontally moving waves inside the PDMS changes, causing a distortion of the pressure field.
By increasing the thickness of the PDMS channel even further, a less distorted pattern is obtained until a transition for values larger than 110 μm to a regular distribution, symmetric about the central pressure node.
This first sensitivity analysis has proven the importance of side effects in the design of chip-integrated microfluidic systems. The vibrations of the PDMS channel triggered by the piezoelectric substrate can cause the development of unexpected distributions of acoustic pressure within the fluid. To reduce the presence of pressure field anomalies, the vibrations in the PDMS must be reduced so that they do not exceed a critical magnitude. Critical ranges of the wall thickness have been reported and should be avoided to end up with the requested capability to manipulate the microparticles.
3.3. Pressure Field Sensitivity Analysis: Impact of Channel Width
Another parametric analysis is reported here in terms of the results of frequency domain analyses at varying widths of the microchannel. On the basis of the previous results, two values of thickness leading to a regular pressure pattern have been exploited in the parametric analysis: 50
μm and 138
μm. Also in this case, the geometry of the PDMS domain has been kept fixed, as reported at the beginning of
Section 3.
The 50
μm thick case results to be the best as, from the solution of the parametric analysis, the pressure pattern does not depend on the channel width and therefore matches the SSAW-driven one.
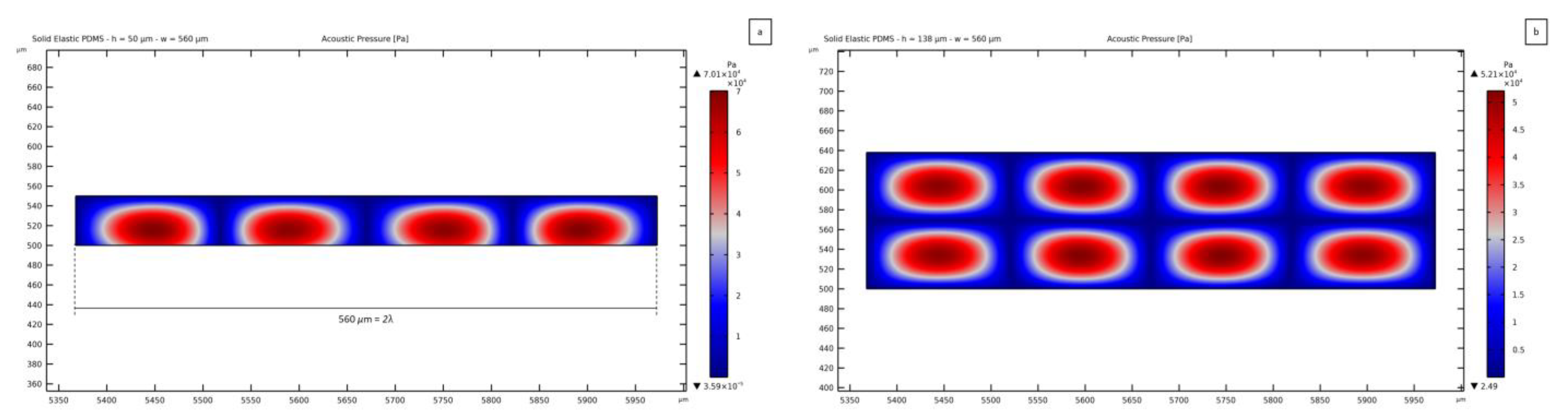
Figure 10a shows the results in terms of the standing pressure field transmission for a 560
μm wide channel, equal to 2
: the maximum pressure magnitude is comparable with the value reported in
Figure 6a, with a clear separation between nodes and antinodes induced by the vibrations of the bottom lithium niobate substrate. This solution is here shown to testify that a simple design rule can be that the pressure wave pattern turns out to be more regular when the width of the channel is close to a multiple of the SSAW wavelength. It is important to highlight that the regular distribution of the pressure nodes and antinodes becomes independent of the thickness of the microchannel when its width is equal to a multiple of
. In
Figure 10, the solutions are reported as relevant to two values of thickness, to be compared with the results previously shown. In this case, the number of pressure nodes moves up to 3, matching the corresponding SSAW nodes in the substrate underneath the channel. This solution provides a slightly lower pressure amplitude of 7 × 10
4 Pa, as compared to the case reported in
Figure 6a. In
Figure 10b, the pressure field is plotted for a channel characterized by the same width of 2
and a thickness of 138
μm. As shown in the plot of
Figure 8, where the same value of thickness is considered, the pressure field features one horizontal node, as expected. Also in this case, the pressure pattern is mirroring the underneath SSAW, and the pressure magnitude of 5.21 × 10
4 Pa is near the value for the field shown in
Figure 8.
Being the pressure distribution independent of the channel width in the case of a thickness of 50
μm, the results here reported refer to a 138
μm thick channel. The parametric analysis has highlighted a distorted pattern of the pressure field within the microchannel in the range of widths between 237
μm and 273
μm, smaller than the value of
.
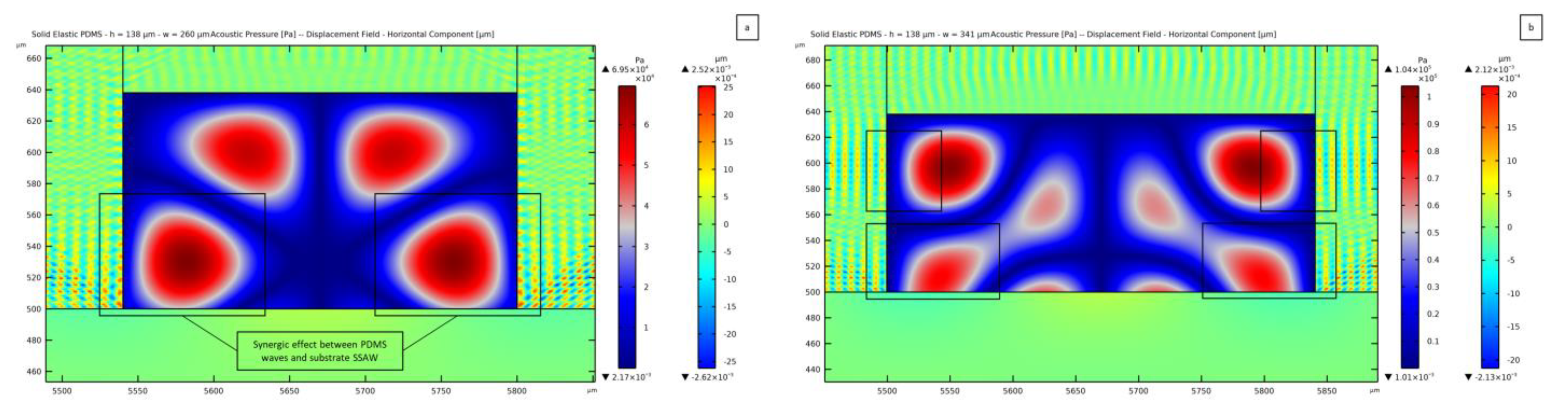
Figure 11a shows the pressure field for a 260
μm wide channel. On the lateral walls, the presence of a horizontal wave is highlighted with black boxes at the interface between the fluid and PDMS. The horizontal displacement amplitude in the PDMS has a value of 2.52 × 10
−3 μm, meaning that the ratio between this horizontal wave amplitude and the one of the SSAW is 5.5.
In the range of widths between 274
μm and 313
μm, the acoustic pressure field within the liquid domain is the same as the one reported for a width of 280
μm in
Figure 8.
The pressure field turns out to be distorted for width values between 314
μm and 344
μm, for which two more lateral nodes are expected,
being greater than
. In this range, the pattern gets distorted with a strange form, similar to what is depicted in
Figure 11b for a channel featuring a width of 341
μm. The horizontal motion of the wave in PDMS acts on the fluid domain in a way to cause the emergence of another antinode, more than the two expected from the substrate SSAW transmission, and the same near the corner on top. This synergistic effect leads to interference near the lateral walls, causing the development of the reported pattern. As discussed before, in these cases, the maximum amplitude of the vibration-induced displacements in the PDMS results to be around 5 times greater than the vertical displacement at the substrate surface. This condition, therefore, seems to be a critical one to be attained for the reported secondary waves to overcome the SSAW-induced ones and to lead to detrimental effects on the pressure pattern and the relevant capacity of the device to manipulate the microparticles.
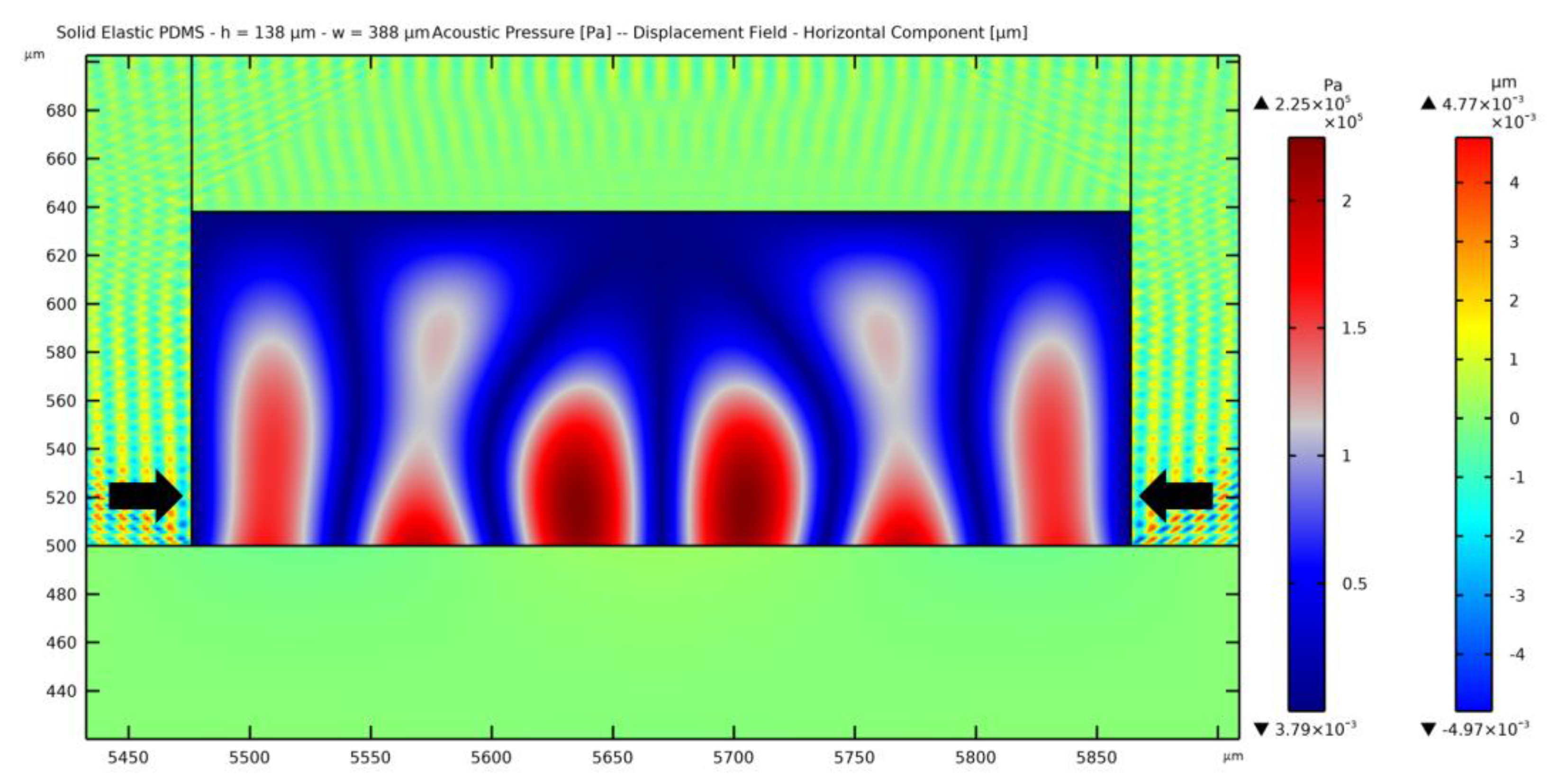
A peculiar solution has been discovered for a width ranging between 345
μm and 420
μm. The interference of the waves causes the presence of five nodes instead of the three expected for the considered width of 388
μm. This pattern seems to be induced by the larger amplitude of the horizontally moving waves in the PDMS with respect to the vertically moving ones from the substrate, as can be seen in
Figure 12. The value of the maximum displacement in the vertical direction is 1.09 × 10
−3 μm, while the one in the horizontal direction is 4.77 × 10
−3 μm, which is 4.4 times greater and more than 10 times greater compared to the substrate maximum displacement amplitude. The same solution is obtained by solving the problem without accounting for the PDMS wave damping, stating that the distortion can be associated with the geometry of the channel itself.
This second sensitivity analysis associated with the microchannel width, has further shown how the distribution of pressure can be affected by small imperfections in the channel geometry. For example, for a 138 μm thick geometry, a regular distribution is obtained if the width of the channel is designed to be equal to the SSAW wavelength or to a multiple of it. A slight deviation from these values causes the distribution to become distorted, characterized by an unexpected pattern, and so has a critical capability to predict the motion of microparticles. Practically, the expected pressure node and antinode locations correspond to one of the SSAWs; therefore, the expected final position of the particles dispersed inside the fluid will be in the pressure nodes. An unexpected pressure pattern, like the ones shown before, causes the microparticles to move towards pressure nodes in unexpected locations. This feature will be specifically investigated next.
3.4. Microparticles Focusing in the Acoustic Pressure Field
To assess the acoustophoretic phenomenon, PS particles have been released in the fluid domain to compute their trajectories induced by the ARF. The reported 2D solutions relevant to the channel cross-section are only intended to show the effect of the acoustic force corresponding to the acoustic radiation.
Results are shown for three channel geometries to assess the capability of particles focusing on the central node. The two pressure patterns reported in
Figure 6a, relevant to
= 50
μm and
= 280
μm, and in
Figure 8, relevant to
= 138
μm and
= 280
μm, have been considered. The distorted pattern reported in
Figure 12 has been considered as well, as characterized by
= 138
μm and
= 388
μm. The study of the motion of the microparticles has been performed with a time-dependent particle tracing analysis. The solutions of the former analyses in the frequency domain have been exploited in terms of standing pressure fields to compute the corresponding values of the ARF. Spherical PS particles with a diameter
= 8
μm have been released inside the fluid domain. To ease the analyses, the freeze condition has been adopted along the walls of the channel; hence, as soon as the particles touch them, their motion gets frozen. Alternatively, bump conditions on the PDMS walls can be adopted in the analyses. Even if the motion of the particles is modeled for a long enough period, it could happen that all the particles come into contact with the channel walls before the analysis is completed; therefore, the positions of the particles at specific time instants are reported next.
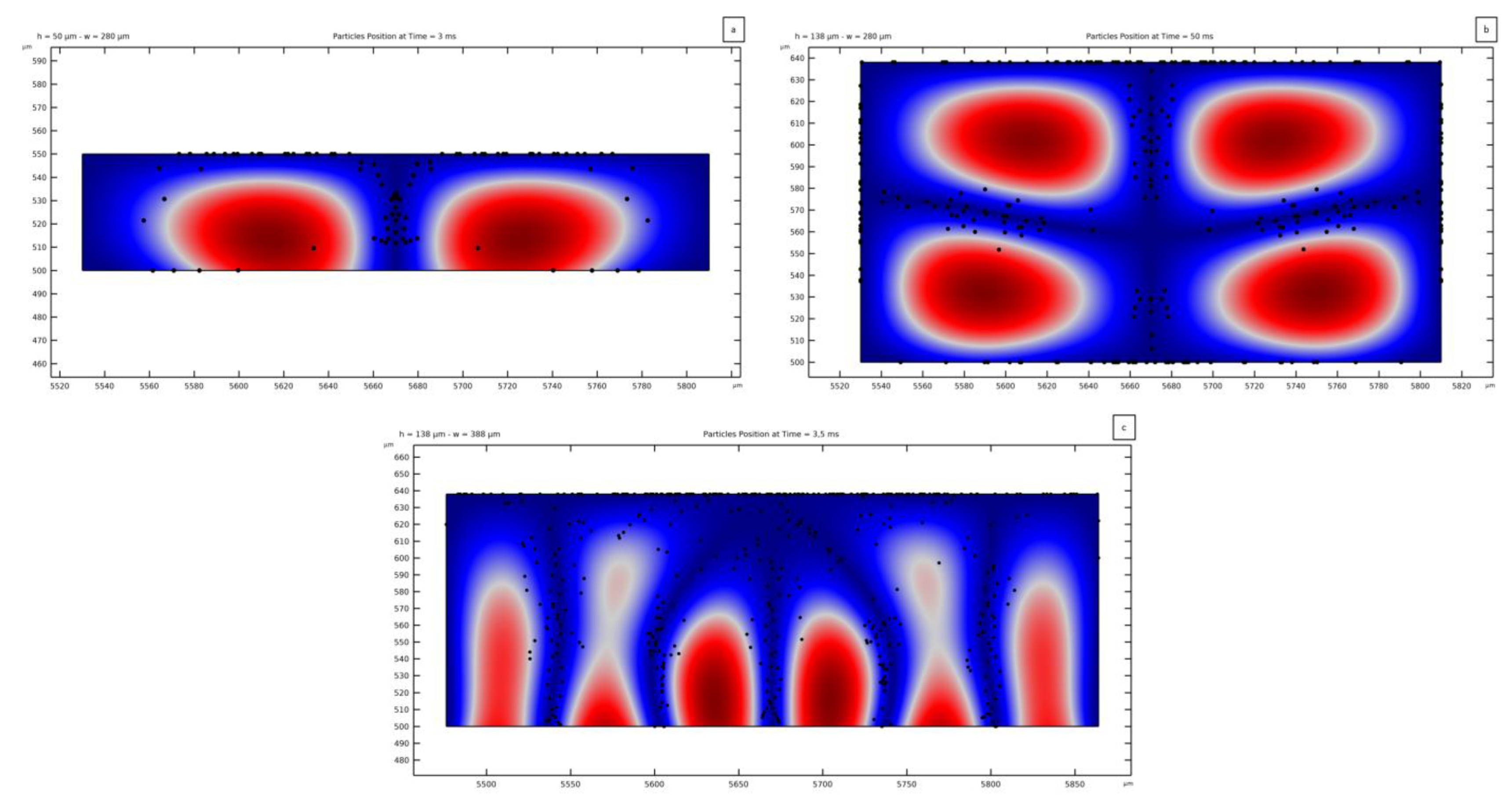
Figure 13a shows the focusing of the microparticles in the central pressure node when 80 particles are released from a 5 × 16 grid. As the antinode shape is similar to a lobe, the particles are displaced accordingly, and not all of them move towards the center of the channel, with some sticking on the top wall. The presence of a fluid flowing in the channel causes the hydrodynamic force to focus the microparticles in the central part of the channel cross-section, supporting the acoustic force [
7]. In a real case, the particles stopping their motion on the walls can instead bounce back and keep getting focused on the pressure nodes. The time needed to move the particles in the reported positions is computed to be 3 ms, proving how fast the manipulation can be obtained as an equivalent acoustic diffusion time.
Figure 13b highlights the possibility of exploiting this method for three-dimensional manipulation, maybe thanks to multiple actuated structures to transmit pressure waves to the fluid from all directions, as suggested before. In this solution, 304 particles have been released from a 16 × 19 grid. The reported final distribution of particles is obtained in 50 ms and does not undergo relevant modifications afterwards. As can be seen, the presence of other nodes besides the vertical one causes the particles to finally focus on multiple positions.
Mispositioning effects are stressed in the pressure field of
Figure 13c, where five pressure nodes are induced by the SSAW and by the secondary PDMS waves transmitted to the fluid. In this case, 464 particles have been released from a 16 × 29 grid. A large set of these particles is shown to be directed towards the top wall and to become frozen there; the remaining particles focus instead on the vertical pressure nodes, as induced by the ARF. The central region of the fluid near the upper wall becomes abounded with microparticles due to a small magnitude of the pressure as compared to the regions near the wall below; this pressure distribution causes the ARF, being proportional to the pressure gradient between separate regions of the pressure field, to show decreasing magnitude if moving upwards in the fluid domain. This result has been reported since it looks fundamental to avoid unexpected pressure patterns in the fluid, with a resulting inability to focus the suspended particles. This outcome accounts for several contributions: The mechanics of the piezoelectric substrate, including the frequency of actuation and the SAW wavelength; the geometry of the channel to generate a regular pressure pattern; and the presence of micro-imperfections causing the distortion of this pattern. The current analyses have testified to the ability to manipulate the microparticles while also exploiting the interference of the fluid with the vibrations in the surrounding media as a premise for a vertical regularity in the pressure field.
3.5. Non-Flowing Fluid Modeling of PDMS
Having stated the effect of the secondary waves transmitted by the solid elastic PDMS, a further comparison is here reported to discuss how the solution is affected if the PDMS is modeled as an absorbing, non-flowing fluid.
An impedance boundary condition is adopted at the boundaries of the PDMS domain. The value of the specific impedance applied to the lateral boundaries to mimic air reads
= 411.6 Pa∙s/m; the one adopted at the upper boundary to mimic the presence of an additional portion of PDMS reads instead
= 1.04 × 10
6 Pa∙s/m. The acoustic attenuation coefficient that has been associated with the PDMS domain is
= 7757 dB/m, as obtained by allowing for the experimental data reported in [
57]. The acoustic impedance is a specific property of the material, computed as the product of its density by the speed of sound:
. By comparing the acoustic impedance values at the interface between two different materials, an estimation of the amount of wave energy reflected back or transmitted by this boundary can be obtained. When two materials are characterized by similar values of the acoustic impedance, for instance, water and PDMS, the acoustic wave is more likely to be transmitted through the interface and change the propagation medium. Instead, when the mismatch between the two values is large, as in the case of a PDMS/air interface, a great part of the acoustic waves is reflected back. The percentage of reflected wave energy can be computed using the following equation:
The value of , at the interfaces characterizing the device, provides an indication of the propagation of the acoustic waves. The wave starts propagating on the LiNbO3 substrate, featuring an impedance value of = 1.65 × 107 Pa∙s/m, computed with the Rayleigh wave speed , and is transmitted to the water inside the microchannel, featuring an impedance of = 1.49 × 106 Pa∙s/m. Substituting and inside equation 17, the value of at this interface is 69.6%, which means that the transmitted percentage is = 30.4%. This result can be associated with the leaky-SAW phenomenon due to the lower speed of the acoustic waves in water with respect to the speed of the Rayleigh waves on the substrate. The value of at the PDMS/water interface is 96.8%, meaning that the acoustic waves can propagate between the fluid and the PDMS almost without reflection.
As a comparison with the solutions reported so far, the same channel geometries considered in
Section 3.4 have been considered in the analyses leading to the solutions shown in
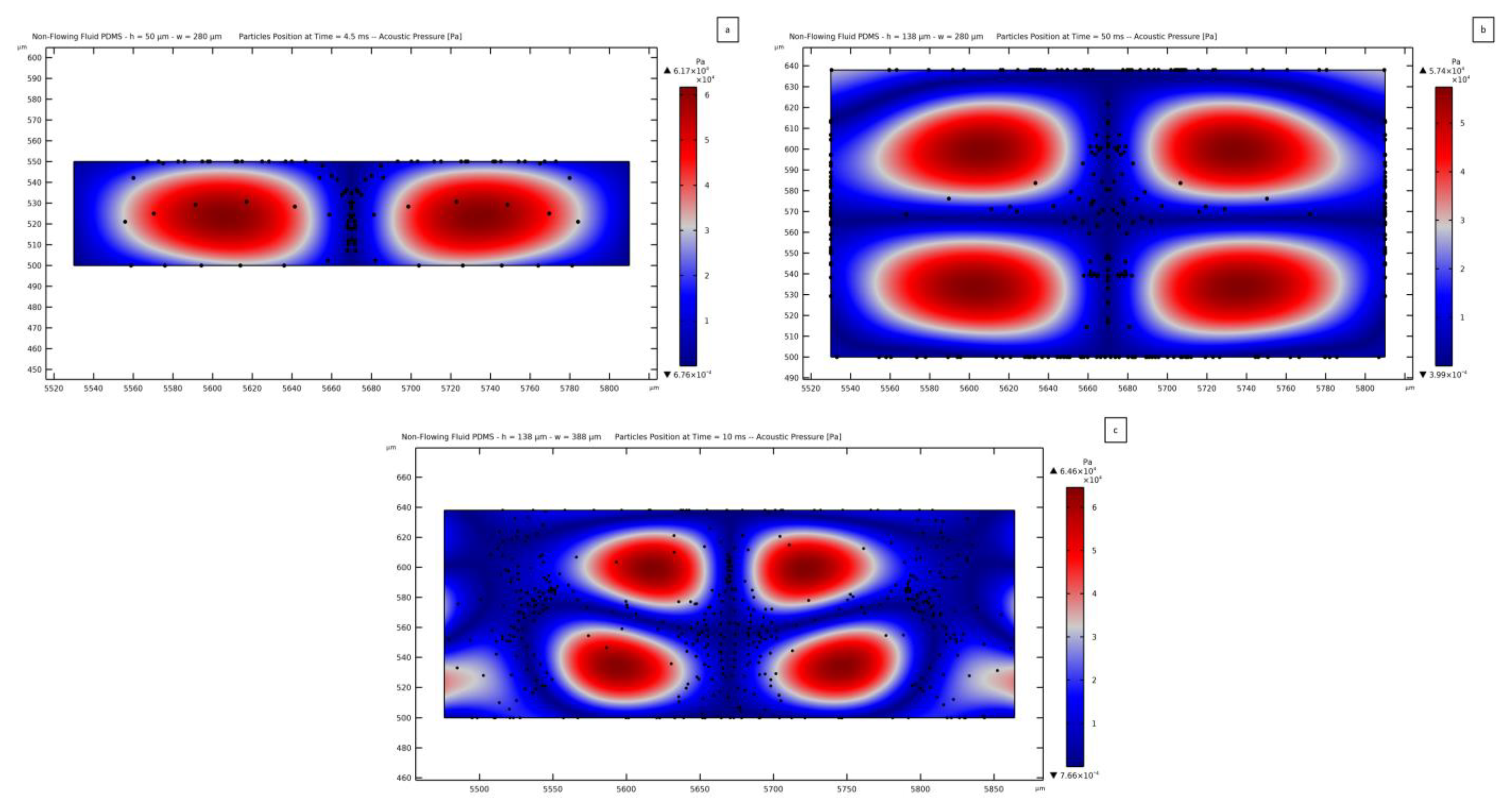
Figure 14. In this way, both the acoustic pressure field and the effect of the ARF on the positioning of microparticles can be compared. A condition of continuity of the pressure field has been set in the model between the water and PDMS domains, meaning that the Helmholtz equation is solved for both of them with such continuity at the interface. This condition has not been imposed for the solid elastic PDMS model, as the elastic response of the PDMS to the SSAW stimulus has been computed, and then the elastic waves have been transmitted to the fluid in the microchannel.
For the channel 50
μm thick and 280
μm wide, the acoustic pressure distribution results are similar to the already reported solution, with one central pressure node and two lateral antinodes, to resemble the shape of the SSAW in the substrate. The amplitude of the acoustic pressure within the fluid domain is 6.17 × 10
4 Pa, amounting to 73% of the value obtained with the solid elastic PDMS case. In
Figure 14a, the position of the microparticles is reported; it can be seen that the same distribution of particles reported in
Figure 13a has been obtained. The ARF pushes the particles mainly towards the central pressure node, with only a few particles displaced towards the upper and lateral surfaces.
Figure 14b reports the acoustic pressure in the case of a channel 138
μm thick and 280
μm wide. Also in this case, the acoustic pressure distribution is similar to the already discussed one, with one vertical node, one horizontal node, and four antinodes. By comparing this solution with the one reported in
Figure 13b, it can be seen that the horizontal node seems to be flatter in the present solution of
Figure 14b. Anyway, the motion of the microparticles turns out to be the same as the one reported in
Figure 13b.
The solution for the case featuring a channel 138
μm thick and 388
μm wide is instead much different from that of the other model. The acoustic pressure distribution shown in
Figure 14c is similar to the one provided by the waves in the substrate; therefore, the central pressure node sets in together with a horizontal wavy node, no more flat than in the solution reported in
Figure 14b. Four antinodes also show up, as expected for this channel thickness. The shape of the pressure wave in the central portion of the channel is similar to the one reported in
Figure 13b and
Figure 14b. Near the lateral walls, a less regular solution has been found. This effect can be related to the width of the channel being larger than
and smaller than 2
; therefore, the successive antinode cannot be fully enforced by the substrate. Similarly to what was observed in
Section 3.3, the best way to generate a regular acoustic pressure distribution seems to be provided by designing a microchannel whose width is a multiple of
, so that the SSAW can be properly transmitted. This rule is not meant to be generally valid; it is just reported as a consideration for the results obtained with the reported model. The contribution of the waves propagating within the PDMS, if modeled as a solid elastic material, can be clearly distinguished by comparing
Figure 13b and
Figure 14b. The waves in the PDMS structure, being greater in magnitude than the ones coming from the substrate, provide an additional antinode to the pressure field and cause two more nodes if compared to the field in
Figure 14b. An additional effect caused by the waves in the PDMS is related to the amplitude of the pressure wave within the channel, which results in a greater magnitude than the one achieved for a non-flowing fluid model. Specifically, it turns out to be equal to 6.46 × 10
4 Pa in the latter analysis, only 29% of the value obtained with the solid elastic PDMS solution. The two solutions reported in
Figure 13c and
Figure 14c have led to two different particle-focusing positions. Considering the SSAW, the expected pressure distribution is more similar to the one obtained by modeling the PDMS as an absorbing, non-flowing fluid. This model, the other way around, does not take into account the propagation of elastic waves within the PDMS, which causes the generation of a more distorted pressure field. Therefore, the two results highlight the importance of modeling the solid nature of PDMS to fully assess the behavior of the material in response to actuation of the substrate surface.





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}