
A Temperature Prediction Model for Flexible Electronic Devices Based on GA-BP Neural Network and Experimental Verification



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Temperature Prediction Model and Experiment
2.1. Research Object
2.2. Temperature Prediction Model
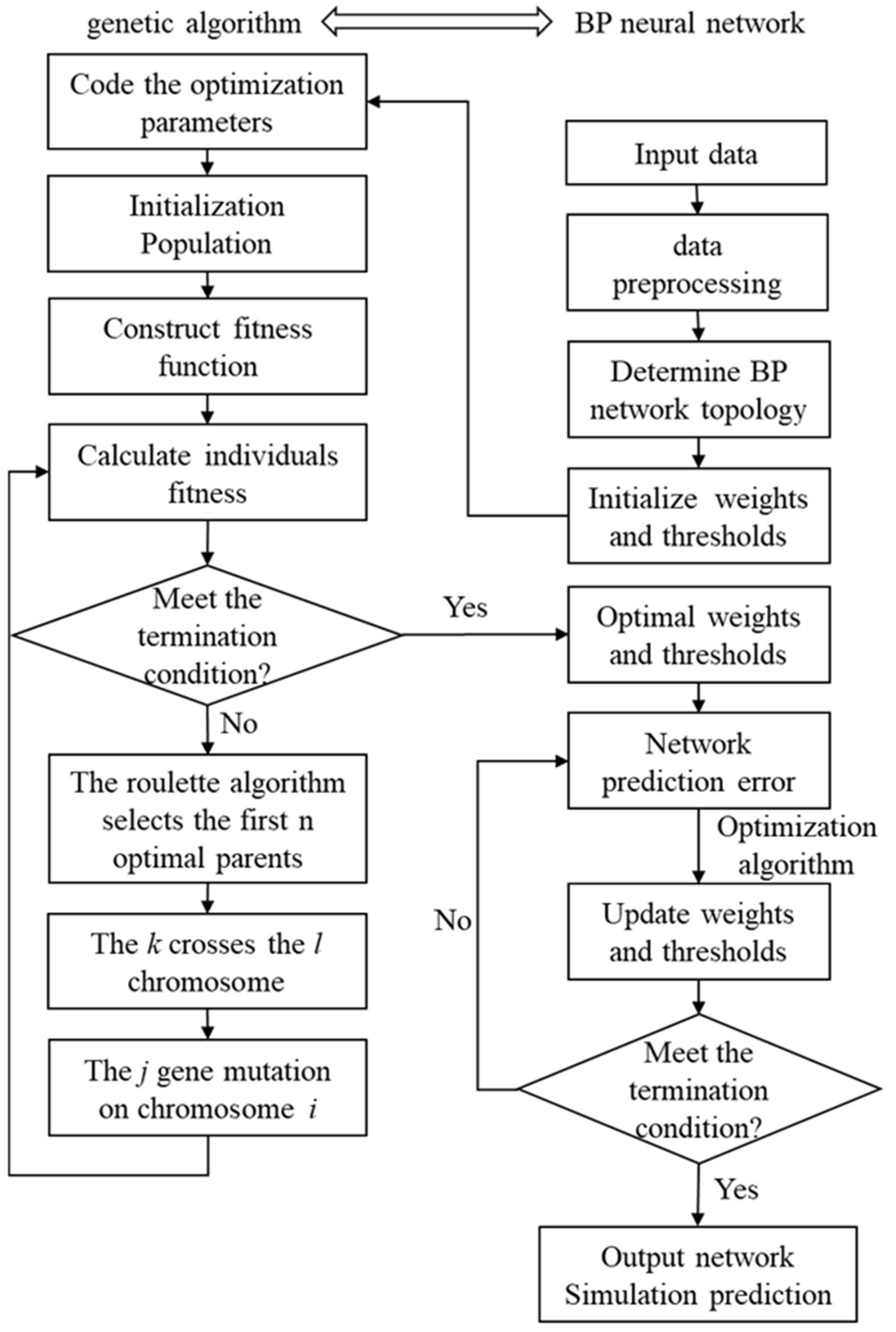
2.2.1. Genetic Algorithm
- 1.
- Selecting operationThis operation involves the identification of the dominant individual from the parent population to the offspring population, with the aim of retaining exceptional individuals. A range of selection methods exist, including the roulette and tournament methods. In these methods, the likelihood of selecting the dominant individual is linked to its fitness value, with higher fitness resulting in a higher probability of selection.
- 2.
- Cross operationThe cross operation involves selecting two individuals from the paternal population and exchanging two chromosomes to create a superior individual. The process of cross operation entails the arbitrary pairing of individuals in a given population, with one or more chromosomal positions being randomly selected for each pair.
- 3.
- Mutation operationMutation involves selecting an individual from its parent and selecting a specific point within the chromosome to be altered, ultimately creating a more optimally adapted individual.
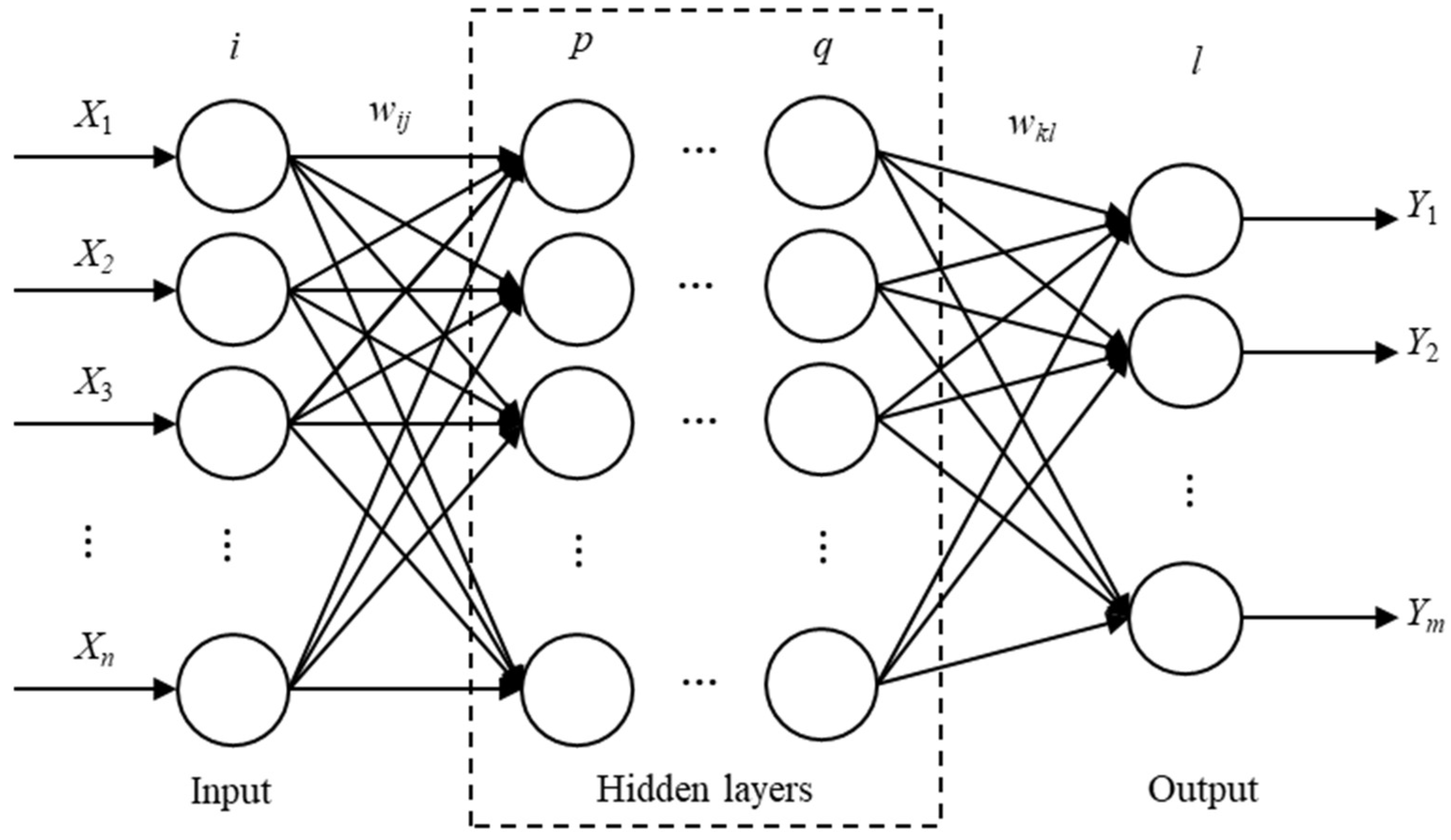
2.2.2. GA-BP Neural Network Algorithm
- 1.
- The output calculation of hidden layer and output layerAccording to input variable X, connection weight ωij between input layer and hidden layer, and hidden layer threshold a, the output H1,j of the first hidden layer is calculated.where p1 represents the number of nodes in the first hidden layer and f is the activation function for that layer. pt denotes the number of nodes in the hidden layer of layer t, while ωij refers to the weight of the connection between layer t and layer t − 1. Consequently, the output of the hidden layer of layer t can be expressed as:Using the output of the last hidden layer Hj, connect the weight ωjk and threshold b to calculate the BP neural network and predict the output O:
- 2.
- Update parameters according to errorsCalculate the network prediction error e based on the network prediction output O and the expected output Y:After computing the prediction error, it is propagated backwards and subsequently used to update the connection weights ω from the output to the input layer:
- 3.
- The training data are constantly supplied to the network, and the algorithm continues to iterate until the termination criteria are fulfilled, thus accomplishing the network’s training process.
2.3. Design of Prediction Methods
2.3.1. Thermal Simulation and Experiment
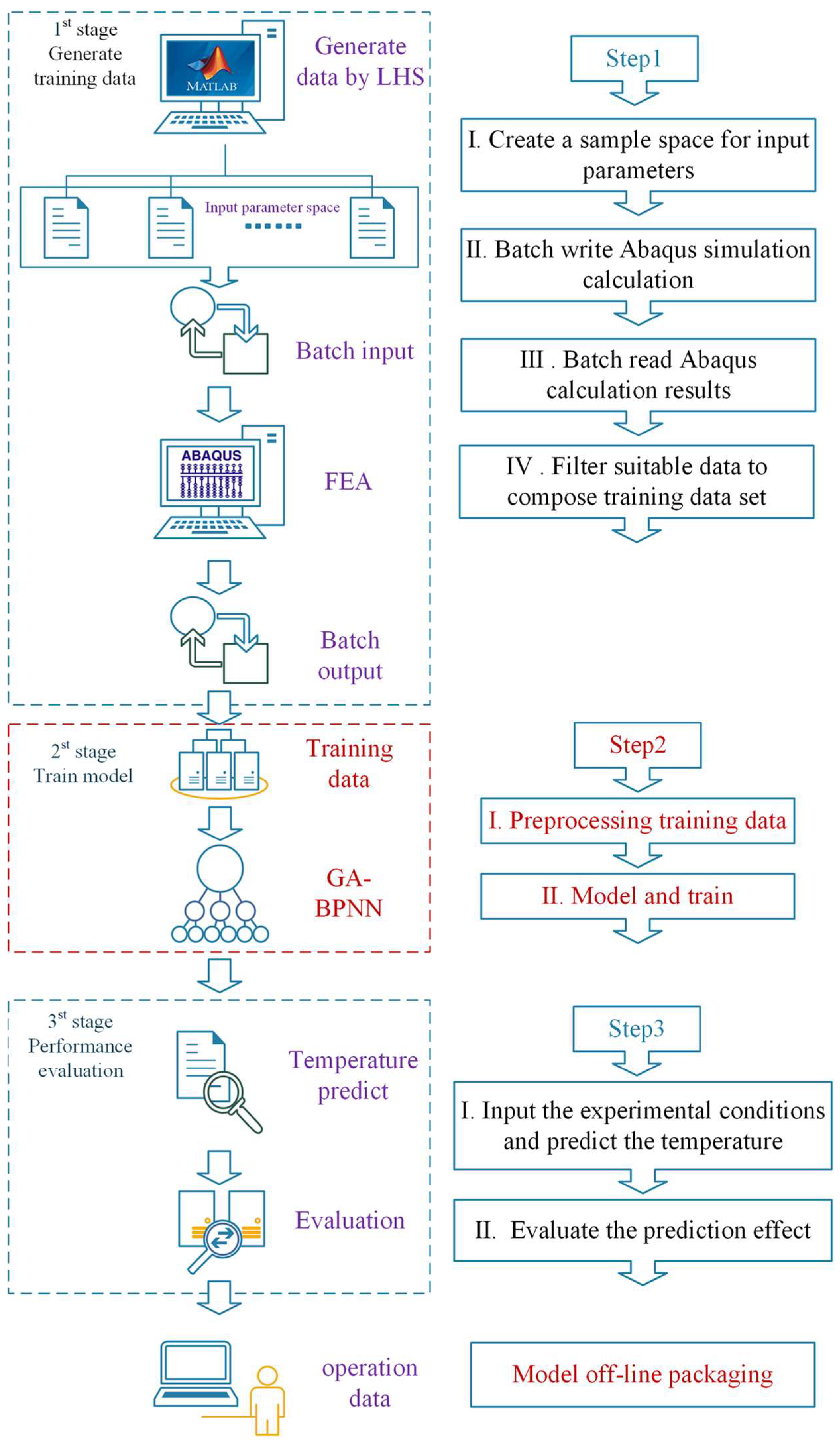
2.3.2. Prediction Method Based on GA-BP Neural Network
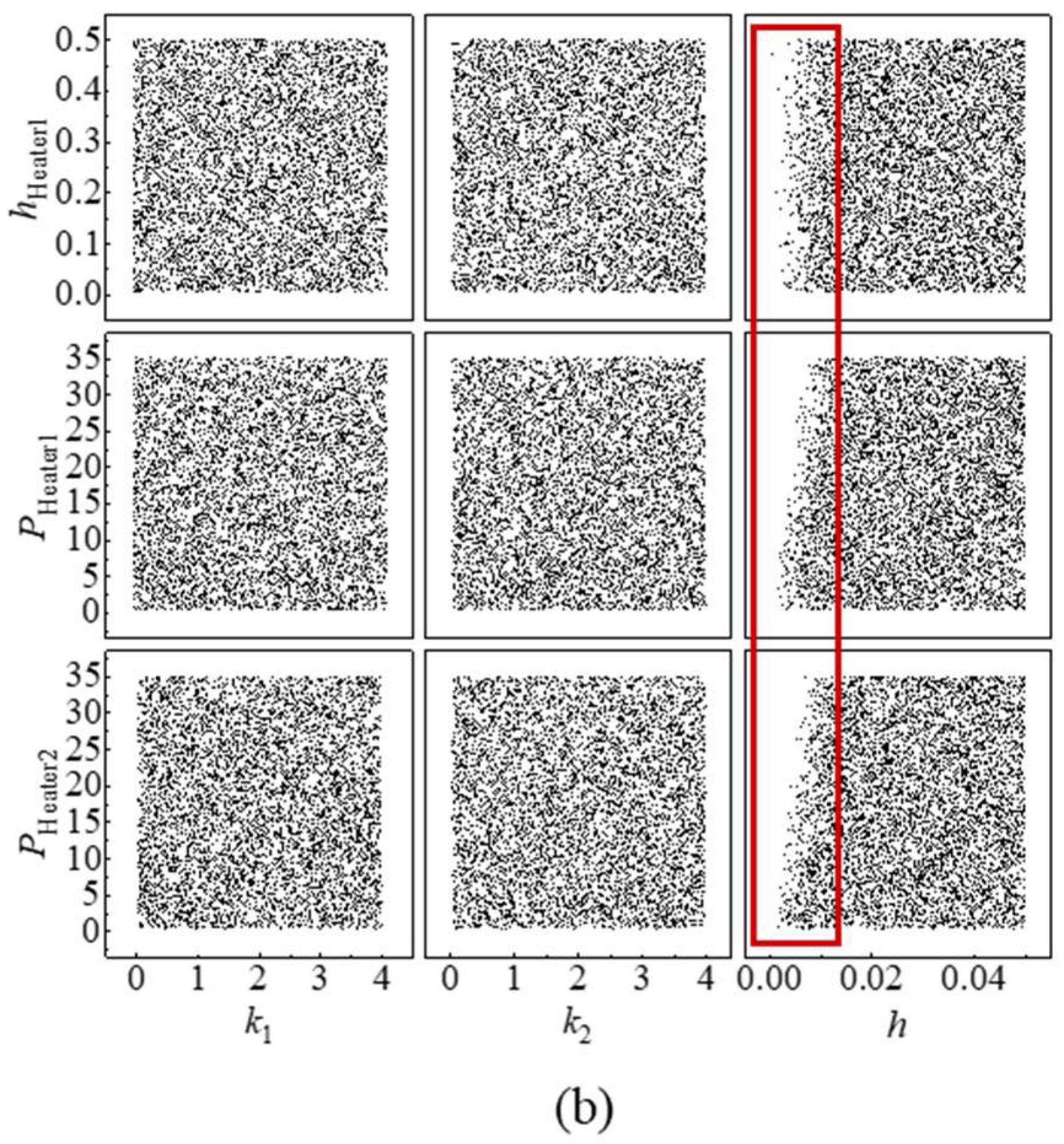
- Step1: Generate training data
- Step2: Training model
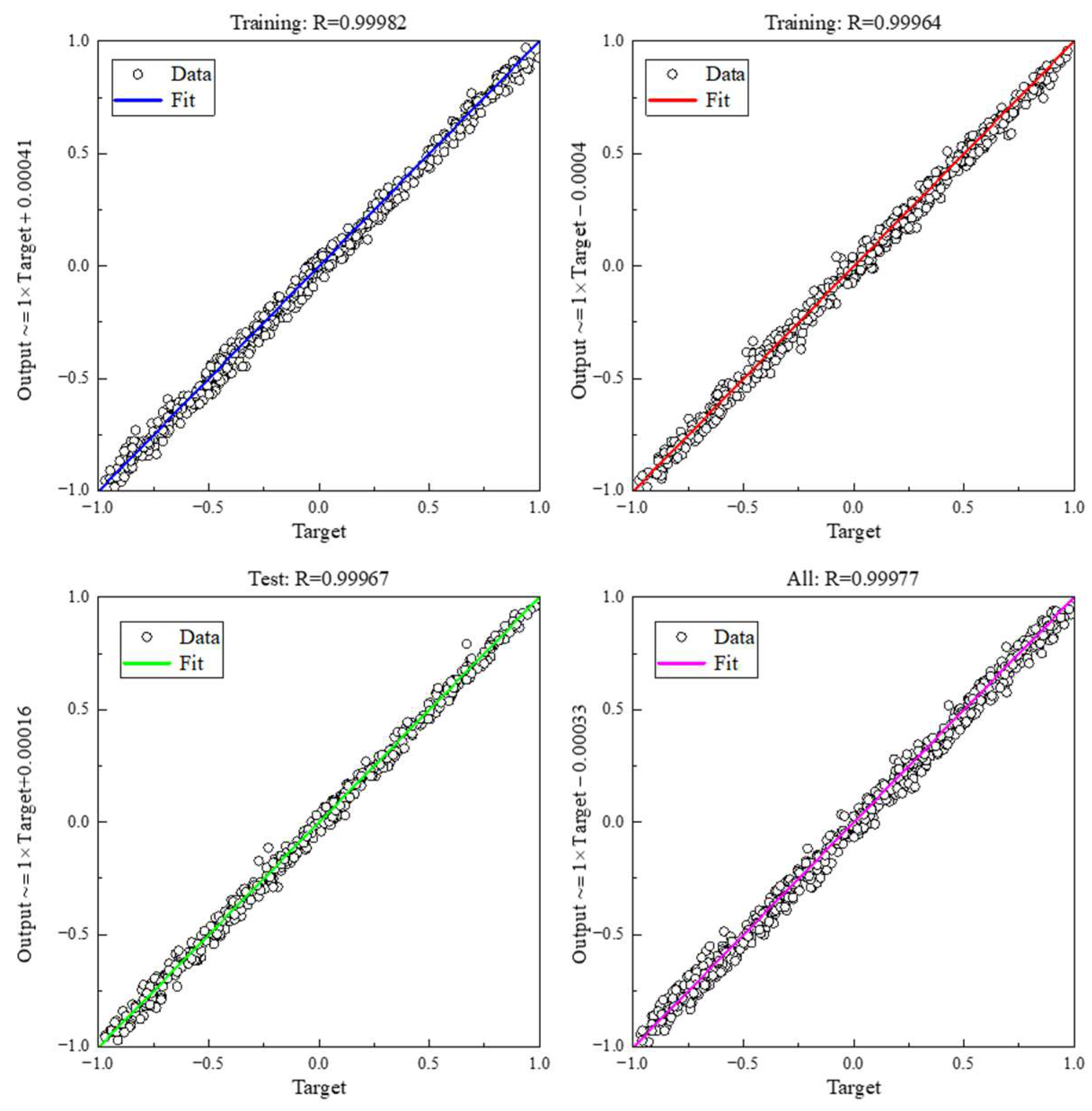
- Step3: Evaluation of model performance
3. Results and Discussion
3.1. Comparison of Results
3.2. Model Setup Analysis
3.2.1. Normalization Method
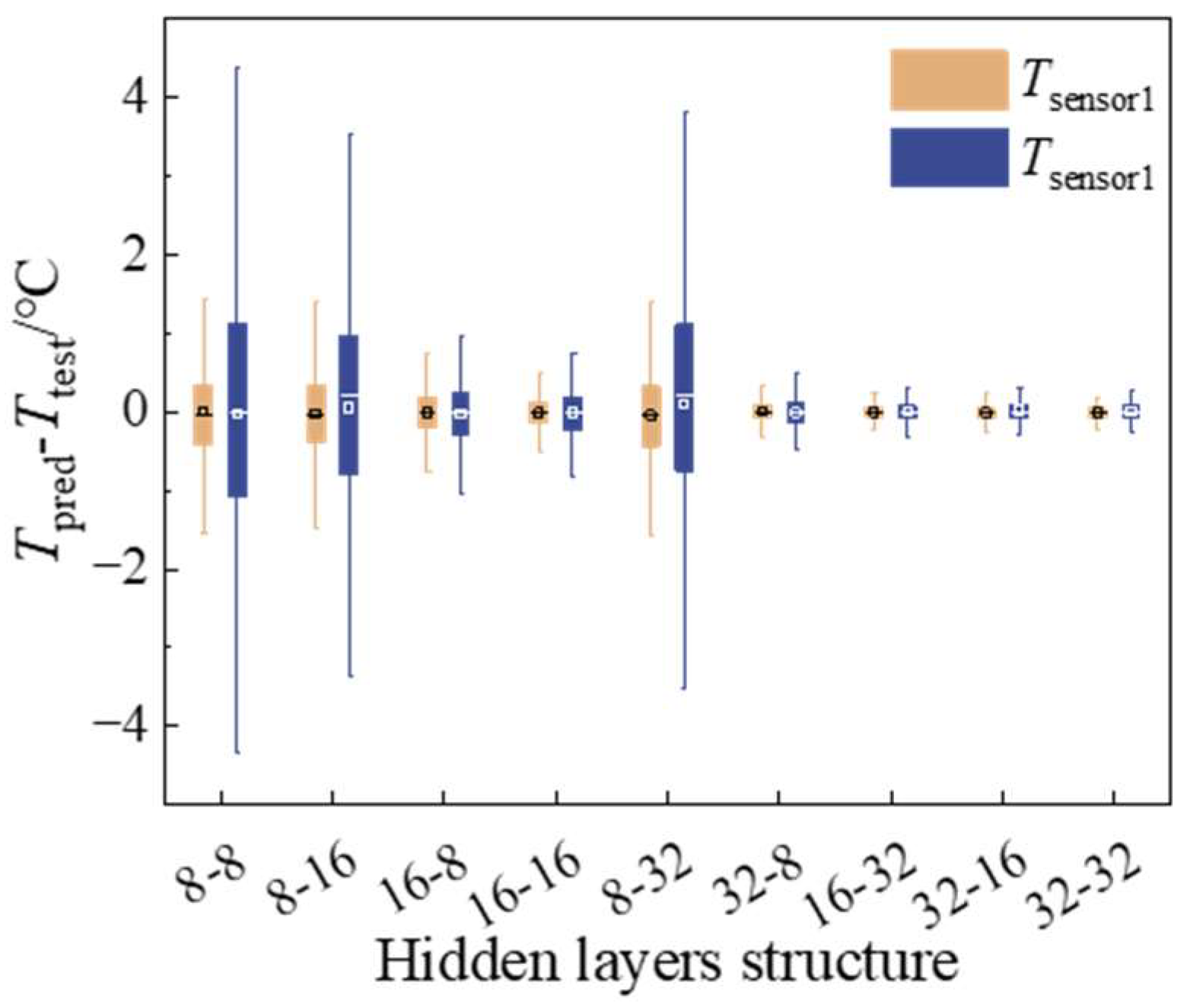
3.2.2. Network Structure
3.2.3. Analysis of Results
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Jiang, F.; Thangavel, G.; Zhou, X.; Adit, G.; Fu, H.; Lv, J.; Zhan, L.; Zhang, Y.; Lee, P.S. Ferroelectric Modulation in Flexible Lead-Free Perovskite Schottky Direct-Current Nanogenerator for Capsule-Like Magnetic Suspension Sensor. Adv. Mater. 2023, 35, 2302815. [Google Scholar] [CrossRef]
- Song, J.W.; Ryu, H.; Bai, W.; Xie, Z.; Vázquez-Guardado, A.; Nandoliya, K.; Avila, R.; Lee, G.; Song, Z.; Kim, J.; et al. Bioresorbable, wireless, and battery-free system for electrotherapy and impedance sensing at wound sites. Sci. Adv. 2023, 9, eade4687. [Google Scholar] [CrossRef]
- Lu, D.; Li, S.; Yang, Q.; Arafa, H.M.; Xu, Y.; Yan, Y.; Ostojich, D.; Bai, W.; Guo, H.; Wu, C.; et al. Implantable, wireless, self-fixing thermal sensors for continuous measurements of microvascular blood flow in flaps and organ grafts. Biosens. Bioelectron. 2022, 206, 114145. [Google Scholar] [CrossRef]
- He, H.; Ouyang, J. Enhancements in the mechanical stretchability and thermoelectric properties of PEDOT: PSS for flexible electronics applications. Acc. Mater. Res. 2020, 1, 146–157. [Google Scholar] [CrossRef]
- Hu, Y.; Peng, L.M.; Xiang, L.; Zhang, H. Flexible integrated circuits based on carbon nanotubes. Acc. Mater. Res. 2020, 1, 88–99. [Google Scholar] [CrossRef]
- Huang, Y.; Zhu, C.; Xiong, W.; Wang, Y.; Jiang, Y.; Qiu, L.; Guo, D.; Hou, C.; Jiang, S.; Yang, Z.; et al. Flexible smart sensing skin for “Fly-by-Feel” morphing aircraft. Sci. China Technol. Sci. 2022, 65, 1–29. [Google Scholar] [CrossRef]
- Kim, J.; Campbell, A.S.; de Ávila, B.E.F.; Wang, J. Wearable biosensors for healthcare monitoring. Nat. Biotechnol. 2019, 37, 389–406. [Google Scholar] [CrossRef] [PubMed]
- Ma, Y.; Zhang, Y.; Cai, S.; Han, Z.; Liu, X.; Wang, F.; Cao, Y.; Wang, Z.; Li, H.; Chen, Y.; et al. Flexible hybrid electronics for digital healthcare. Adv. Mater. 2020, 32, 1902062. [Google Scholar] [CrossRef]
- Kim, J.H.; Hwang, J.Y.; Hwang, H.R.; Kim, H.S.; Lee, J.H.; Seo, J.W.; Shin, U.S.; Lee, S.H. Simple and cost-effective method of highly conductive and elastic carbon nanotube/polydimethylsiloxane composite for wearable electronics. Sci. Rep. 2018, 8, 1375. [Google Scholar] [CrossRef] [PubMed]
- Yoo, S.; Yang, T.; Park, M.; Jeong, H.; Lee, Y.J.; Cho, D.; Kim, J.; Kwak, S.S.; Shin, J.; Park, Y.; et al. Responsive materials and mechanisms as thermal safety systems for skin-interfaced electronic devices. Nat. Commun. 2023, 14, 1024. [Google Scholar] [CrossRef]
- Gibbons, M.J.; Marengo, M.; Persoons, T. A review of heat pipe technology for foldable electronic devices. Appl. Therm. Eng. 2021, 194, 117087. [Google Scholar] [CrossRef]
- Luo, W.J.; Vishwakarma, P.; Hsieh, C.C.; Panigrahi, B. Microfluidic modular heat sink with improved material characteristics towards thermal management of flexible electronics. Appl. Therm. Eng. 2022, 216, 119142. [Google Scholar] [CrossRef]
- Zhao, Z.; Li, Y.; Dong, S.; Cui, Y.; Dai, Z. An analytic model for transient heat conduction in bi-layered structures with flexible serpentine heaters. Appl. Math. Mech. 2021, 42, 1279–1296. [Google Scholar] [CrossRef]
- Shi, Y.; Wang, C.; Yin, Y.; Li, Y.; Xing, Y.; Song, J. Functional soft composites as thermal protecting substrates for wearable electronics. Adv. Funct. Mater. 2019, 29, 1905470. [Google Scholar] [CrossRef]
- Zhao, Z.; Yin, Y.; Fan, X.; Li, Y. Thermomechanical analysis of the stretchable serpentine heaters considering finite deformation. Compos. Struct. 2022, 294, 115811. [Google Scholar] [CrossRef]
- Shuai, Y.; Zhao, J.; Bo, R.; Lan, Y.; Lv, Z.; Zhang, Y. A wrinkling-assisted strategy for controlled interface delamination in mechanically-guided 3D assembly. J. Mech. Phys. Solids 2023, 173, 105203. [Google Scholar] [CrossRef]
- Pan, F.; Cui, K.; Bai, G.; Feng, X.; Liu, F.; Zhang, W.; Huang, Y. Radiation-pressure-antidam** enhanced optomechanical spring sensing. ACS Photonics 2018, 5, 4164–4169. [Google Scholar] [CrossRef]
- Huang, Z.; Cui, K.; Bai, G.; Feng, X.; Liu, F.; Zhang, W.; Huang, Y. High-mechanical-frequency characteristics of optomechanical crystal cavity with coupling waveguide. Sci. Rep. 2016, 6, 34160. [Google Scholar] [CrossRef] [PubMed]
- Li, K.; Shuai, Y.; Cheng, X.; Luan, H.; Liu, S.; Yang, C.; Xue, Z.; Huang, Y.; Zhang, Y. Island effect in stretchable inorganic electronics. Small 2022, 18, 2107879. [Google Scholar] [CrossRef] [PubMed]
- Jiang, F.; Zhou, X.; Lv, J.; Chen, J.; Chen, J.; Kongcharoen, H.; Zhang, Y.; Lee, P.S. Stretchable, breathable, and stable lead-free perovskite/polymer nanofiber composite for hybrid Triboelectric and piezoelectric energy harvesting. Adv. Mater. 2022, 34, 2200042. [Google Scholar] [CrossRef] [PubMed]
- Cheng, X.; Zhang, F.; Bo, R.; Shen, Z.; Pang, W.; Jin, T.; Song, H.; Xue, Z.; Zhang, Y. An anti-fatigue design strategy for 3D ribbon-shaped flexible electronics. Adv. Mater. 2021, 33, 2102684. [Google Scholar] [CrossRef]
- Currie, G.; Hawk, K.E.; Rohren, E.; Vial, A.; Klein, R. Machine learning and deep learning in medical imaging: Intelligent imaging. J. Med. Imaging Radiat. Sci. 2019, 50, 477–487. [Google Scholar] [CrossRef] [PubMed]
- Benton, W.C. Machine learning systems and intelligent applications. IEEE Softw. 2020, 37, 43–49. [Google Scholar] [CrossRef]
- Gruson, D.; Helleputte, T.; Rousseau, P.; Gruson, D. Data science, artificial intelligence, and machine learning: Opportunities for laboratory medicine and the value of positive regulation. Clin. Biochem. 2019, 69, 1–7. [Google Scholar] [CrossRef] [PubMed]
- Anderson, D. Artificial intelligence and applications in PM&R. Am. J. Phys. Med. Rehabil. 2019, 98, e128–e129. [Google Scholar] [PubMed]
- Rathore, A.S.; Nikita, S.; Thakur, G.; Mishra, S. Artificial intelligence and machine learning applications in biopharmaceutical manufacturing. Trends Biotechnol. 2023, 41, 497–510. [Google Scholar] [CrossRef] [PubMed]
- Chang, C.C.; Lin, C.J. LIBSVM: A library for support vector machines. ACM Trans. Intell. Syst. Technol. (TIST) 2011, 2, 1–27. [Google Scholar] [CrossRef]
- Ku, W.; Lee, G.; Lee, J.Y.; Kim, D.H.; Park, K.H.; Lim, J.; Cho, D.; Ha, S.-C.; Jung, B.-G.; Hwang, H.; et al. Rational design of hybrid sensor arrays combined synergistically with machine learning for rapid response to a hazardous gas leak environment in chemical plants. J. Hazard. Mater. 2024, 466, 133649. [Google Scholar] [CrossRef]
- Lee, K.; Cho, I.; Kang, M.; Jeong, J.; Choi, M.; Woo, K.Y.; Yoon, K.J.; Cho, Y.H.; Park, I. Ultra-low-power e-nose system based on multi-micro-led-integrated, nanostructured gas sensors and deep learning. ACS Nano 2022, 17, 539–551. [Google Scholar] [CrossRef]
- Kotsiantis, S.B.; Zaharakis, I.D.; Pintelas, P.E. Machine learning: A review of classification and combining techniques. Artif. Intell. Rev. 2006, 26, 159–190. [Google Scholar] [CrossRef]
- LeCun, Y.; Bengio, Y.; Hinton, G. Deep learning. Nature 2015, 521, 436–444. [Google Scholar] [CrossRef] [PubMed]
- Zerrougui, R.; Adamou-Mitiche, A.B.H.; Mitiche, L. A novel machine learning algorithm for interval systems approximation based on artificial neural network. J. Intell. Manuf. 2023, 34, 2171–2184. [Google Scholar] [CrossRef]
- Schmidhuber, J. Deep learning in neural networks: An overview. Neural Netw. 2015, 61, 85–117. [Google Scholar] [CrossRef] [PubMed]
- Jordan, M.I.; Mitchell, T.M. Machine learning: Trends, perspectives, and prospects. Science 2015, 349, 255–260. [Google Scholar] [CrossRef] [PubMed]
- Xiong, Y.; Guo, L.; Tian, D.; Zhang, Y.; Liu, C. Intelligent optimization strategy based on statistical machine learning for spacecraft thermal design. IEEE Access 2020, 8, 204268–204282. [Google Scholar] [CrossRef]
- Sun, T.; Feng, B.; Huo, J.; Xiao, Y.; Wang, W.; Peng, J.; Li, Z.; Du, C.; Wang, W.; Zhou, G.; et al. Artificial Intelligence Meets Flexible Sensors: Emerging Smart Flexible Sensing Systems Driven by Machine Learning and Artificial Synapses. Nano-Micro Lett. 2024, 16, 14. [Google Scholar] [CrossRef]
- Fang, Y.; Zou, Y.; Xu, J.; Chen, G.; Zhou, Y.; Deng, W.; Zhao, X.; Roustaei, M.; Hsiai, T.K.; Chen, J. Ambulatory cardiovascular monitoring via a machine-learning-assisted textile triboelectric sensor. Adv. Mater. 2021, 33, 2104178. [Google Scholar] [CrossRef]
- Kim, K.; Sim, M.; Lim, S.H.; Kim, D.; Lee, D.; Shin, K.; Moon, C.; Choi, J.W.; Jang, J.E. Tactile avatar: Tactile sensing system mimicking human tactile cognition. Adv. Sci. 2021, 8, 2002362. [Google Scholar] [CrossRef]
- Tan, C.; Dong, Z.; Li, Y.; Zhao, H.; Huang, X.; Zhou, Z.; Jiang, J.W.; Long, Y.Z.; Jiang, P.; Zhang, T.Y. A high performance wearable strain sensor with advanced thermal management for motion monitoring. Nat. Commun. 2020, 11, 3530. [Google Scholar] [CrossRef]













Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Nan, J.; Chen, J.; Li, M.; Li, Y.; Ma, Y.; Fan, X. A Temperature Prediction Model for Flexible Electronic Devices Based on GA-BP Neural Network and Experimental Verification. Micromachines 2024, 15, 430. https://doi.org/10.3390/mi15040430
Nan J, Chen J, Li M, Li Y, Ma Y, Fan X. A Temperature Prediction Model for Flexible Electronic Devices Based on GA-BP Neural Network and Experimental Verification. Micromachines. 2024; 15(4):430. https://doi.org/10.3390/mi15040430
Chicago/Turabian StyleNan, Jin, Jiayun Chen, Min Li, Yuhang Li, Yinji Ma, and Xuanqing Fan. 2024. "A Temperature Prediction Model for Flexible Electronic Devices Based on GA-BP Neural Network and Experimental Verification" Micromachines 15, no. 4: 430. https://doi.org/10.3390/mi15040430
APA StyleNan, J., Chen, J., Li, M., Li, Y., Ma, Y., & Fan, X. (2024). A Temperature Prediction Model for Flexible Electronic Devices Based on GA-BP Neural Network and Experimental Verification. Micromachines, 15(4), 430. https://doi.org/10.3390/mi15040430