
Design and Analysis of a New Tuning Fork Structure for Resonant Pressure Sensor


Abstract
:
1. Introduction
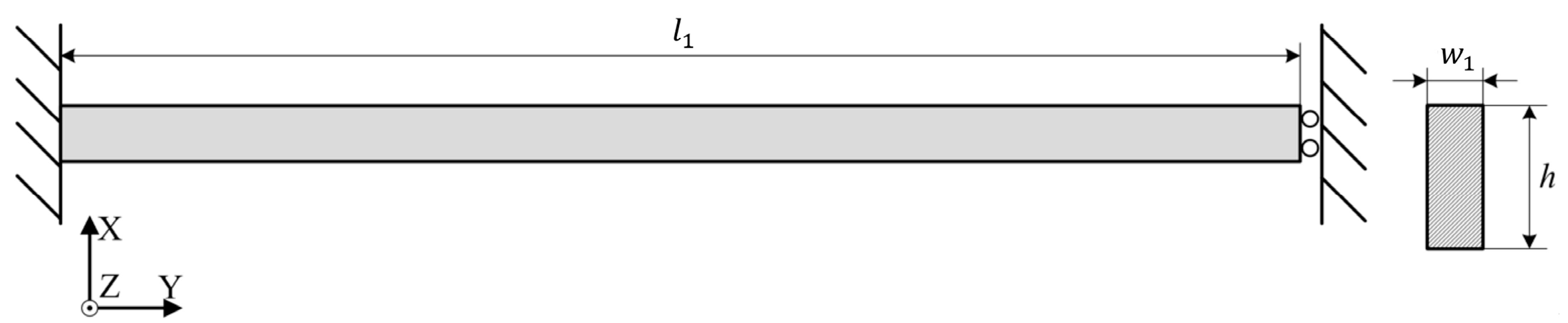
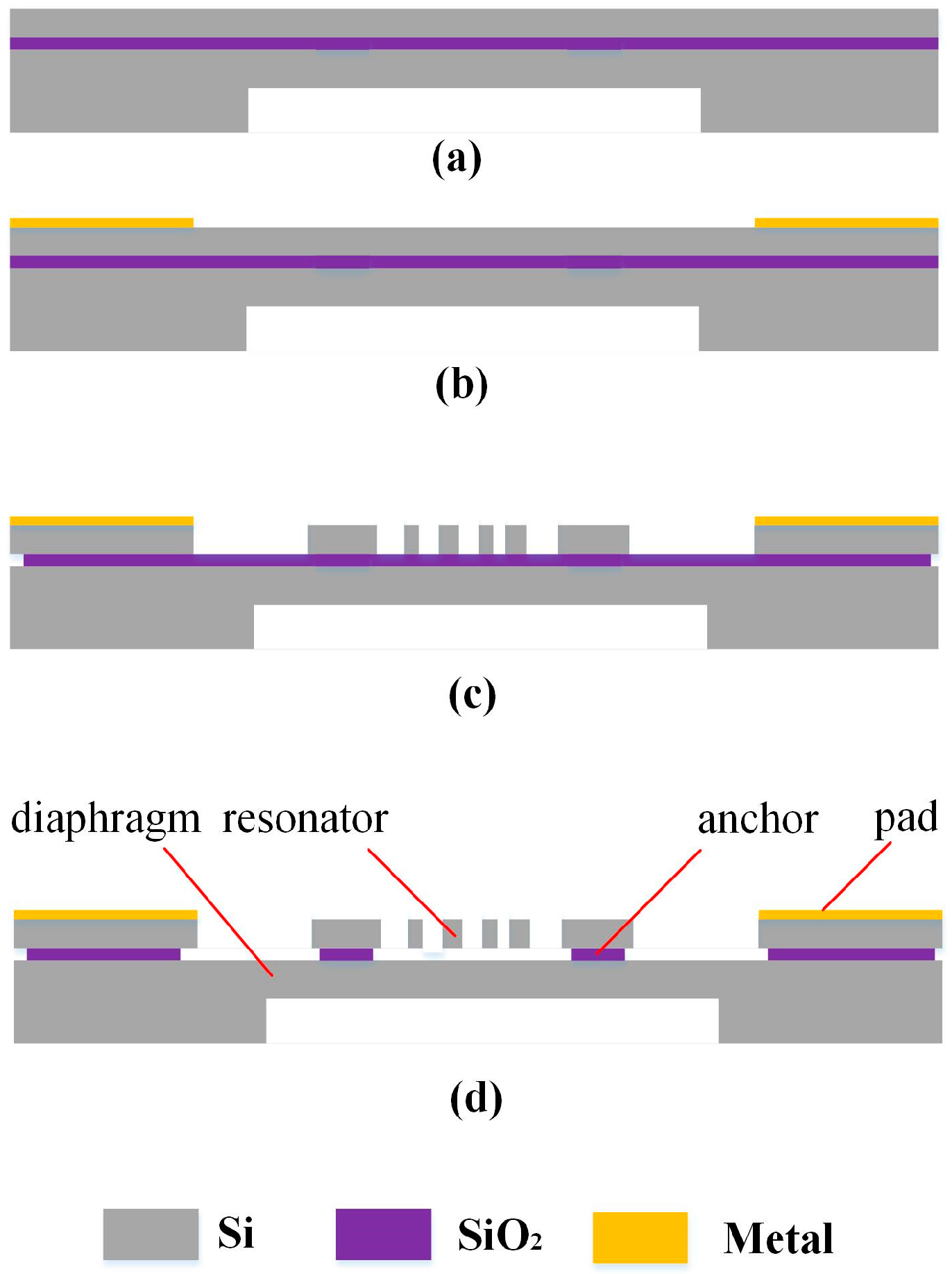
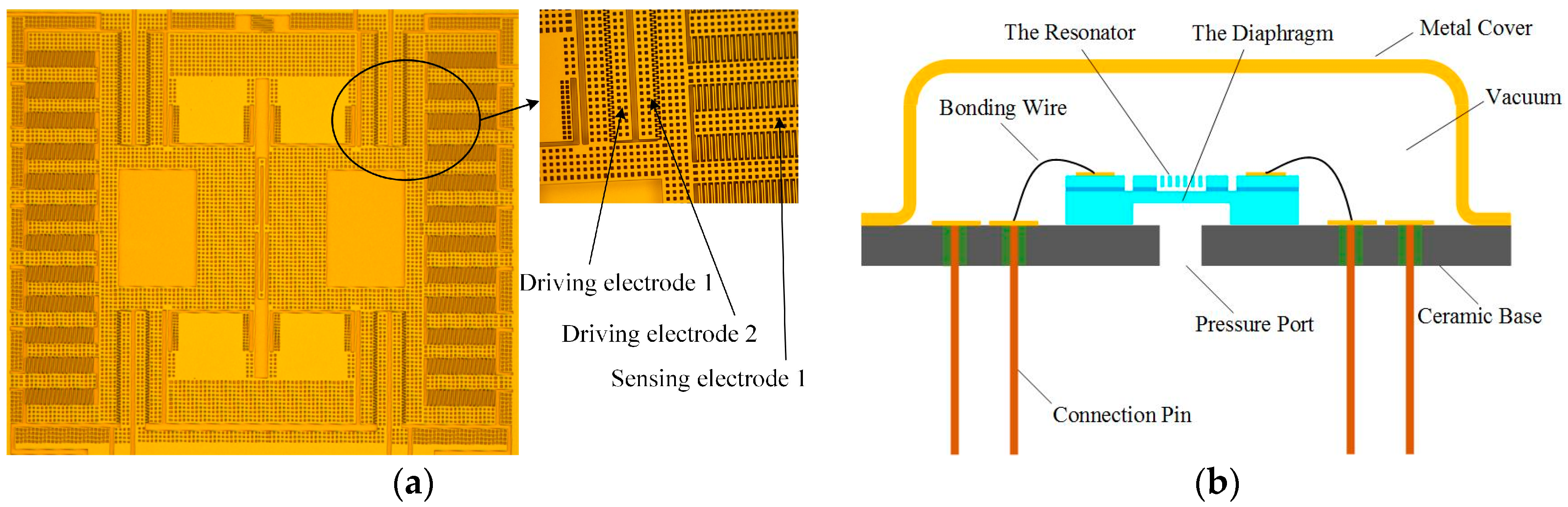
2. Structure Design
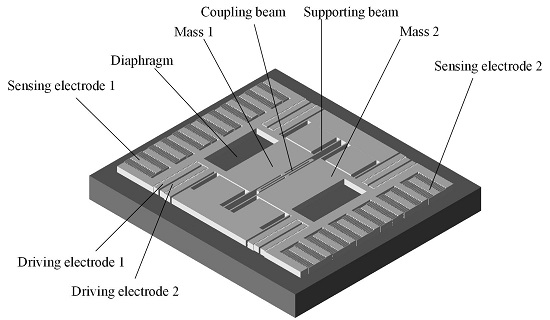
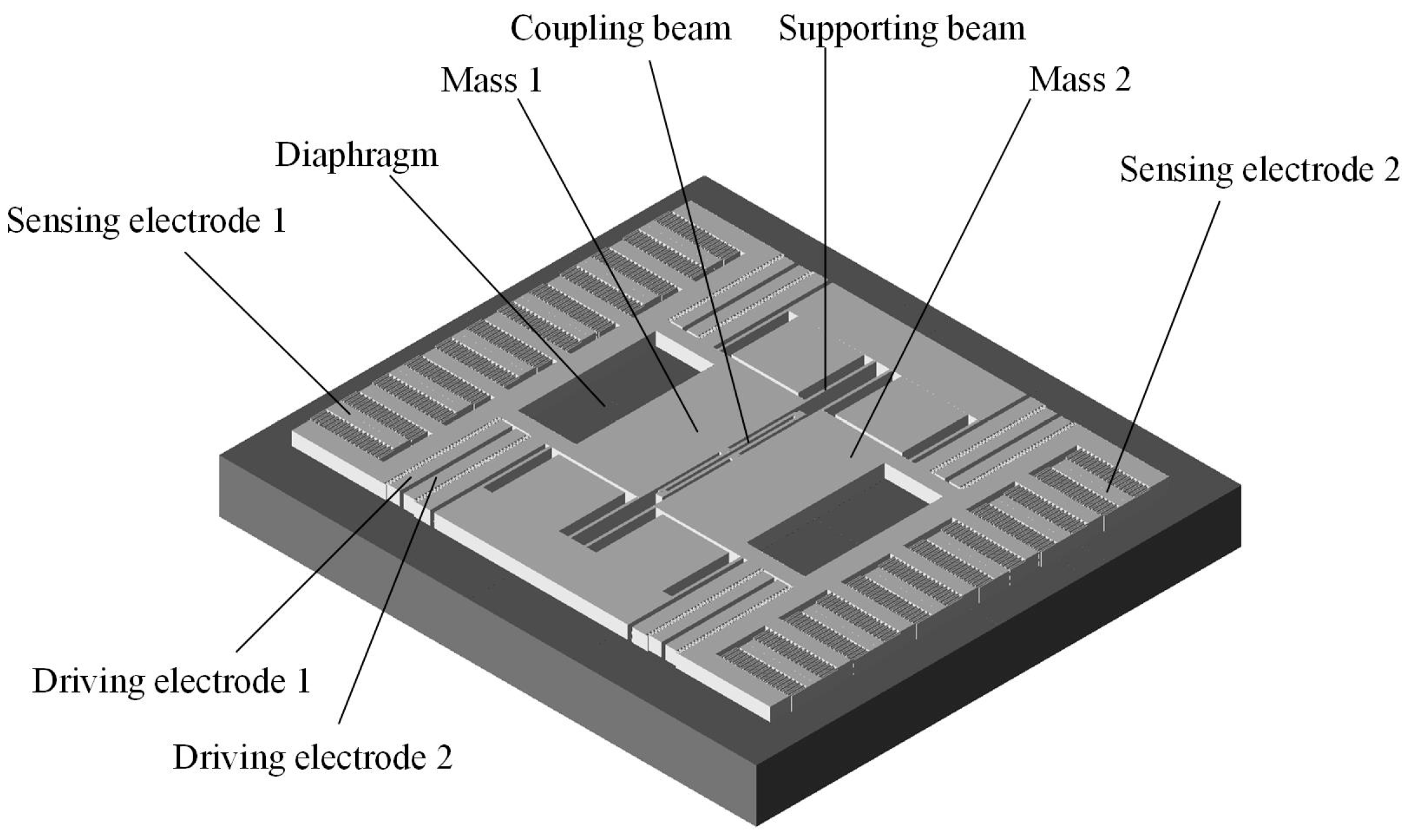
2.1. Structure and Working Principle
2.2. Analysis of the Sensitivity
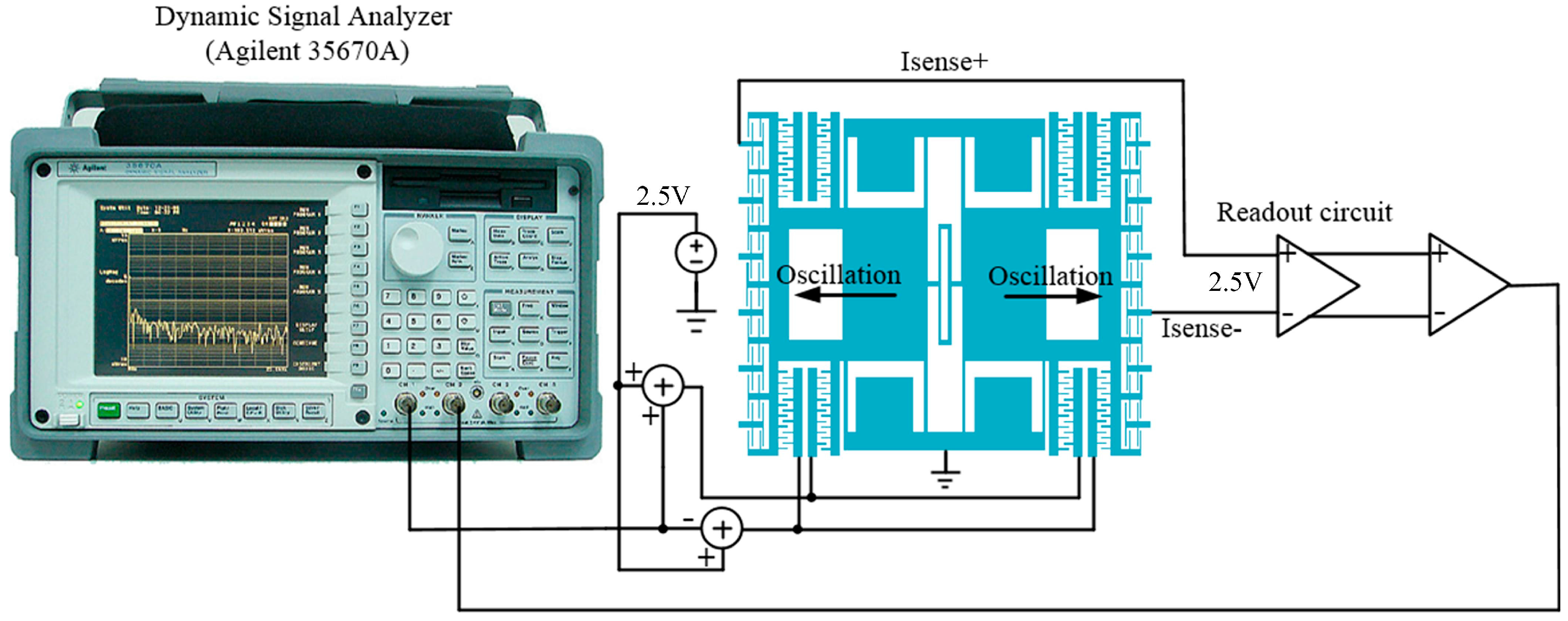
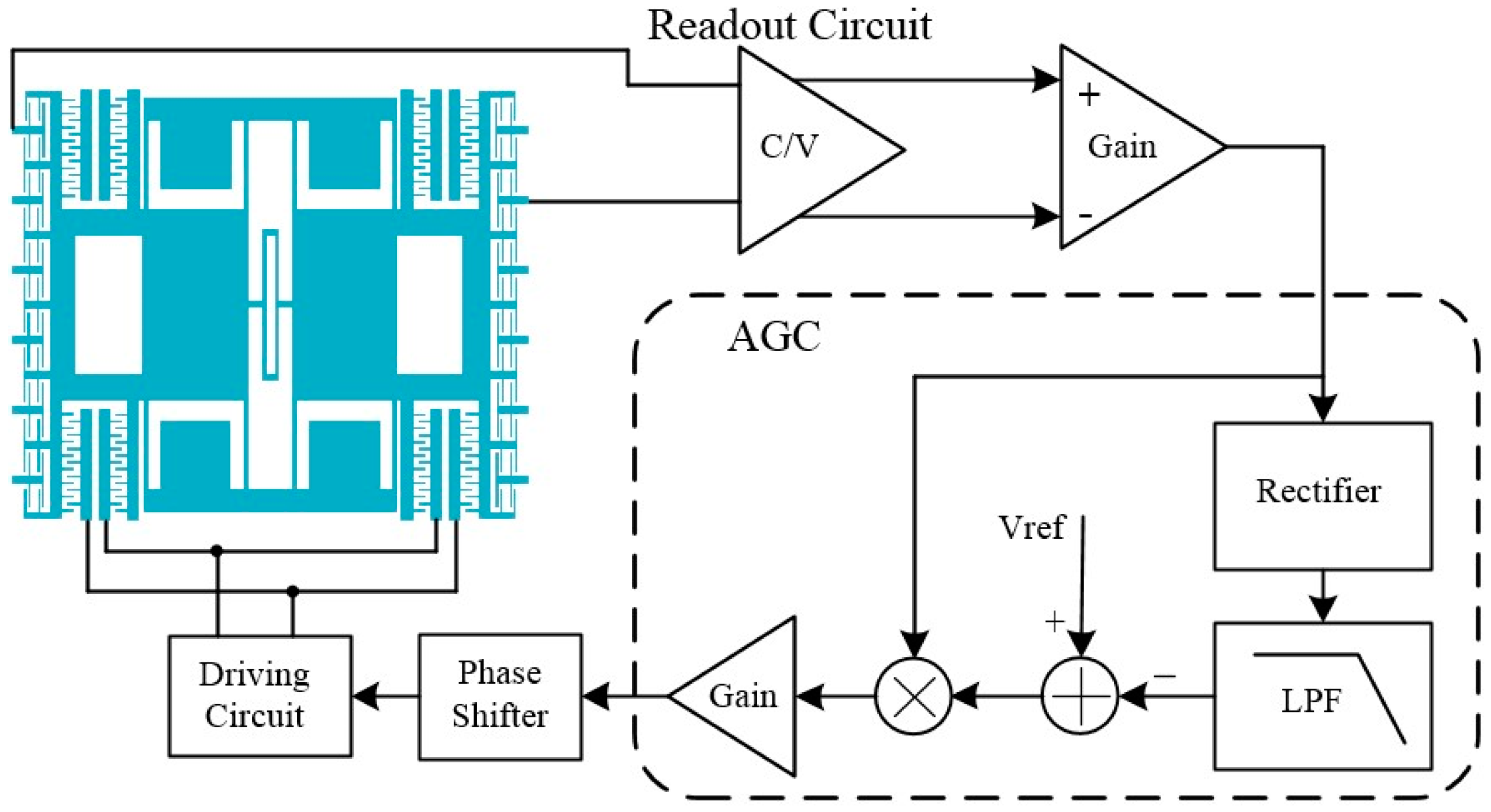
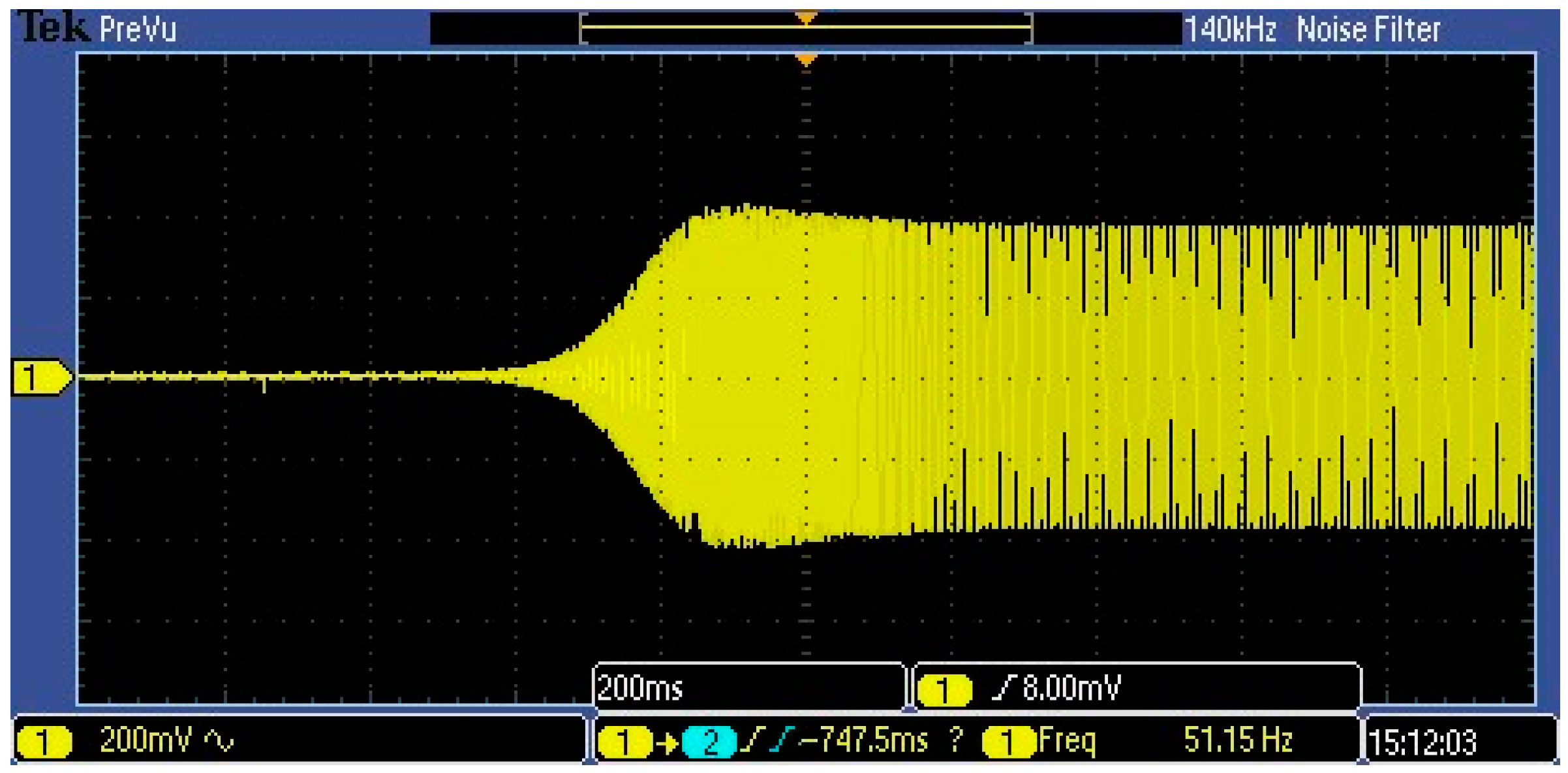
3. Experiment
4. Discussion
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Kinnell, P.K.; Craddock, R. Advances in silicon resonant pressure transducers. Procedia Chem. 2009, 1, 104–107. [Google Scholar] [CrossRef]
- Eaton, W.P.; Smith, J.H. Micromachined pressure sensors: Review and recent developments. Smart Mater. Struct. 1997, 6, 530–539. [Google Scholar] [CrossRef]
- Welham, C.J.; Gardner, J.W.; Greenwood, J. A laterally driven micromachined resonant pressure sensor. Sens. Actuators A Phys. 1996, 52, 86–91. [Google Scholar] [CrossRef]
- Corman, T.; Enoksson, P.; Stemme, G. Low pressure encapsulated resonant structures excited electrostatically. IEEE Trans. 1997, 1, 101–104. [Google Scholar]
- Greenwood, J.C. Silicon in mechanical sensors. J. Phys. E Sci. Instrum. 1988, 21, 1114–1128. [Google Scholar] [CrossRef]
- Ren, S.; Yuan, W.; Qiao, D.; Deng, J.; Sun, X. A micro-machined pressure sensor with integrated resonator operating at atmospheric pressure. Sensors 2013, 13, 1–17. [Google Scholar] [CrossRef]
- Stemme, G. Resonant silicon sensors. J. Micromech. Microeng. 1991, 1, 113–125. [Google Scholar] [CrossRef]
- William, C.T.; Tu-cuong, H.N.; Michael, W.J.; Roger, T.H. Electrostatic-comb drive of lateral polysilicon resonators. Sens. Actuators A Phys. 1990, 21, 328–331. [Google Scholar]
- Kinnell, P.K.; Ward, M.C.L.; Craddock, R. Physical characterisation of selective stresscoupling for resonant pressure sensors. Sens. Actuators A Phys. 2004, 115, 230–234. [Google Scholar] [CrossRef]
- Timoshenko, S.; Goodier, J.N. Theory of Elasticity, 2nd ed.; McGraw-Hill: New York, NY, USA, 1951. [Google Scholar]
- Weaver, W.; Timoshenko, S.P.; Young, D.H. Vibration Problems in Engineering, 4th ed.; Wiley: Hoboken, NJ, USA, 1974; pp. 449–455. [Google Scholar]
- Tilmans, H.A.C.; Elwenspoek, M.; Fluitman, J.H.J. Micro resonant force gauges. Sens. Actuators A Phys. 1992, 30, 35–53. [Google Scholar] [CrossRef]
- Lee, J.E.; Seshia, A.A. Parasitic feed through cancellation techniques for enhanced electrical characterization of electrostatic micro resonators. Sens. Actuators A Phys. 2009, 156, 36–42. [Google Scholar] [CrossRef]
- Sun, X.; Yuan, W.; Qiao, D.; Ren, S. The analysis of the self-oscillation system for resonant pressure sensor. Microsyst. Technol. 2016, 1–7. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Diaphragm size | 1.8 mm × 1.8 mm × 40 μm |
| Length of supporting beam | 150 μm |
| Width of supporting beam | 6 μm |
| Length of coupling beam | 250 μm |
| Width of coupling beam | 9 μm |
| Device layer thickness | 50 μm |
| Stiffness of the supporting beam | 2.16 × 103 N/m |
| Stiffness of the coupling beam | 0.79 × 103 N/m |
| Mass of the resonator | 4.24 × 10−5 g |
© 2016 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license ( http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sun, X.; Yuan, W.; Qiao, D.; Sun, M.; Ren, S. Design and Analysis of a New Tuning Fork Structure for Resonant Pressure Sensor. Micromachines 2016, 7, 148. https://doi.org/10.3390/mi7090148
Sun X, Yuan W, Qiao D, Sun M, Ren S. Design and Analysis of a New Tuning Fork Structure for Resonant Pressure Sensor. Micromachines. 2016; 7(9):148. https://doi.org/10.3390/mi7090148
Chicago/Turabian StyleSun, Xiaodong, Weizheng Yuan, Dayong Qiao, Ming Sun, and Sen Ren. 2016. "Design and Analysis of a New Tuning Fork Structure for Resonant Pressure Sensor" Micromachines 7, no. 9: 148. https://doi.org/10.3390/mi7090148
APA StyleSun, X., Yuan, W., Qiao, D., Sun, M., & Ren, S. (2016). Design and Analysis of a New Tuning Fork Structure for Resonant Pressure Sensor. Micromachines, 7(9), 148. https://doi.org/10.3390/mi7090148