A Micro-Force Sensor with Beam-Membrane Structure for Measurement of Friction Torque in Rotating MEMS Machines

Abstract
:1. Introduction
2. Design
- The sensor should have a relatively high sensitivity to sense the weak force signal. Though a short lever arm can enlarge the force applied to the sensor, the arm installation and alignment between the lever arm and the sensor may turn into a hard connection.
- Excellent linearity is important. The strain in the sensing region should be less than 1/6–1/5 of the material’s ultimate strain, so as to ensure the measurement linearity, namely less than 500 μm for the silicon [18].
- Overload protection is required. Since the silicon-based sensors are fragile, unpredictable impulsive force in sensor packing, system assembling or practical measuring can break the structure, putting the sensor out of work.
- A proper sensor form is needed. The sensor will be connected to the lever arm to measure the target force, and a well-designed form can make the connection more easy and precise.
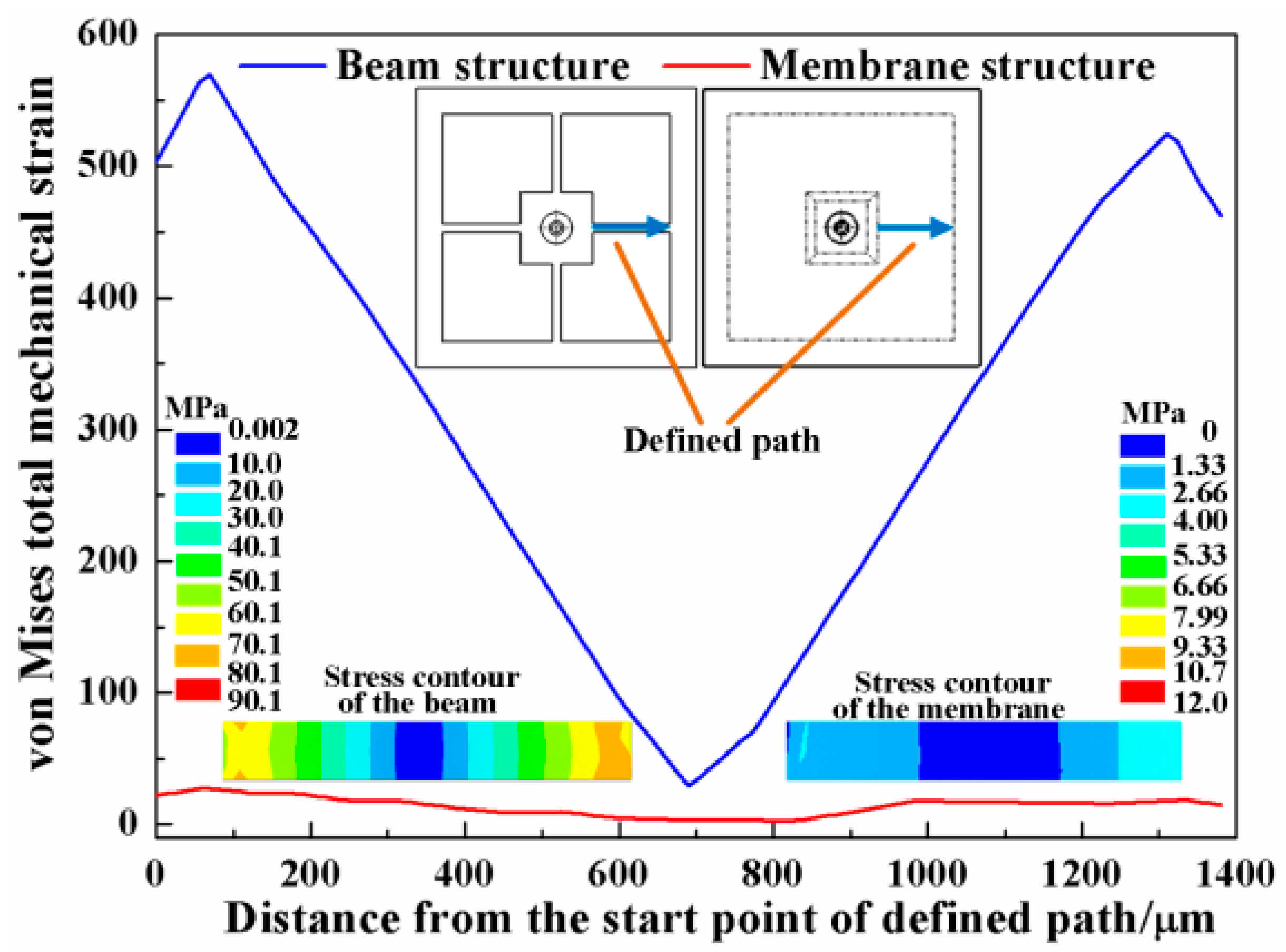
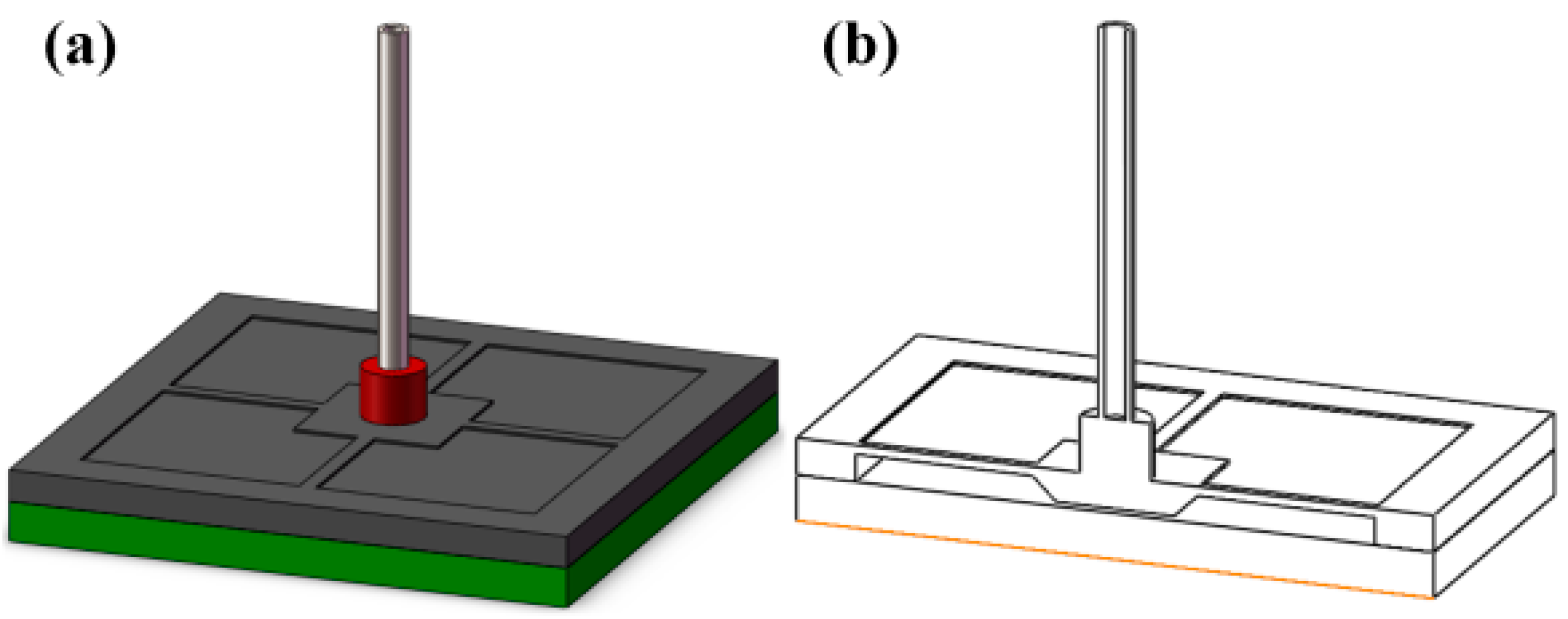
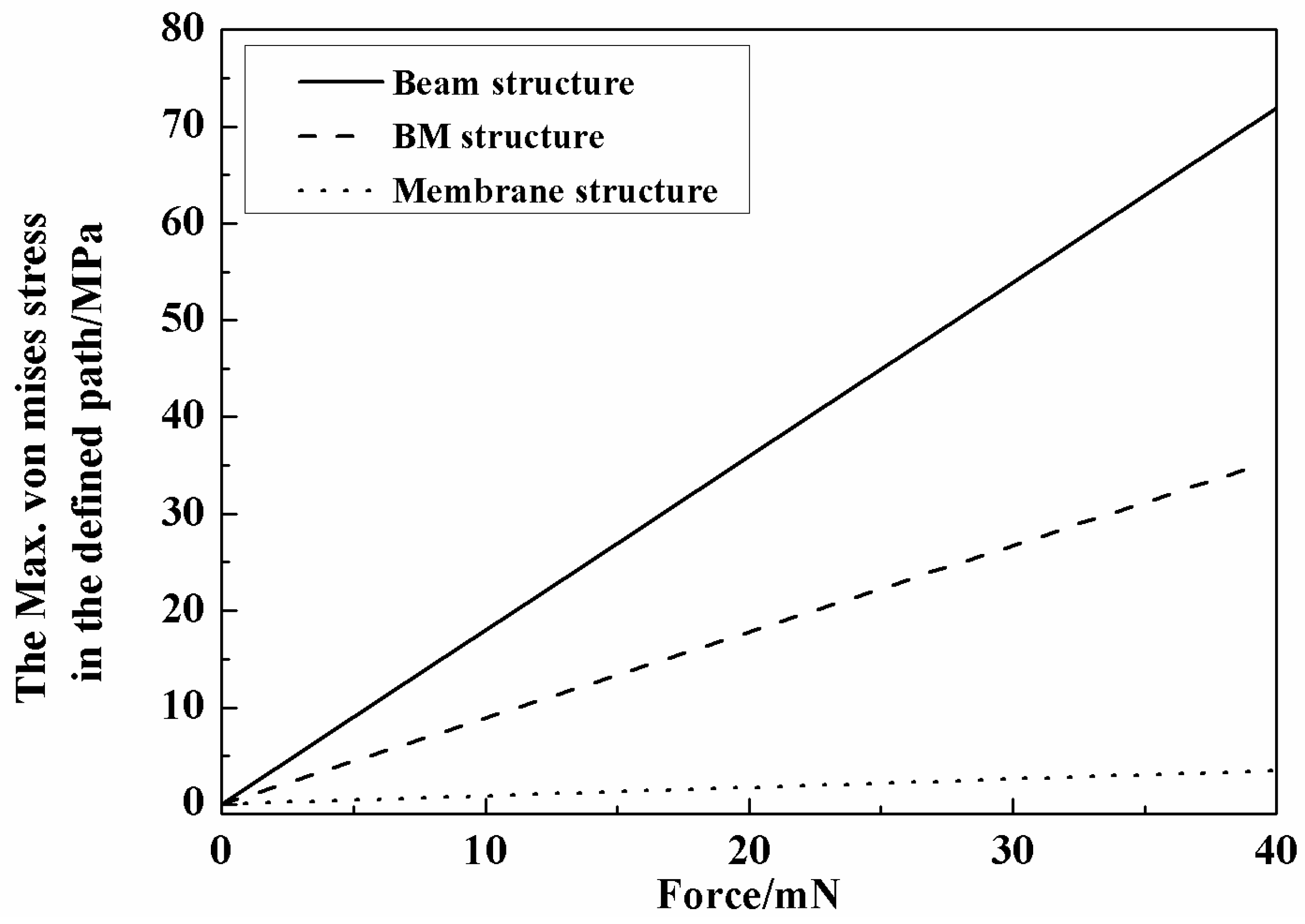
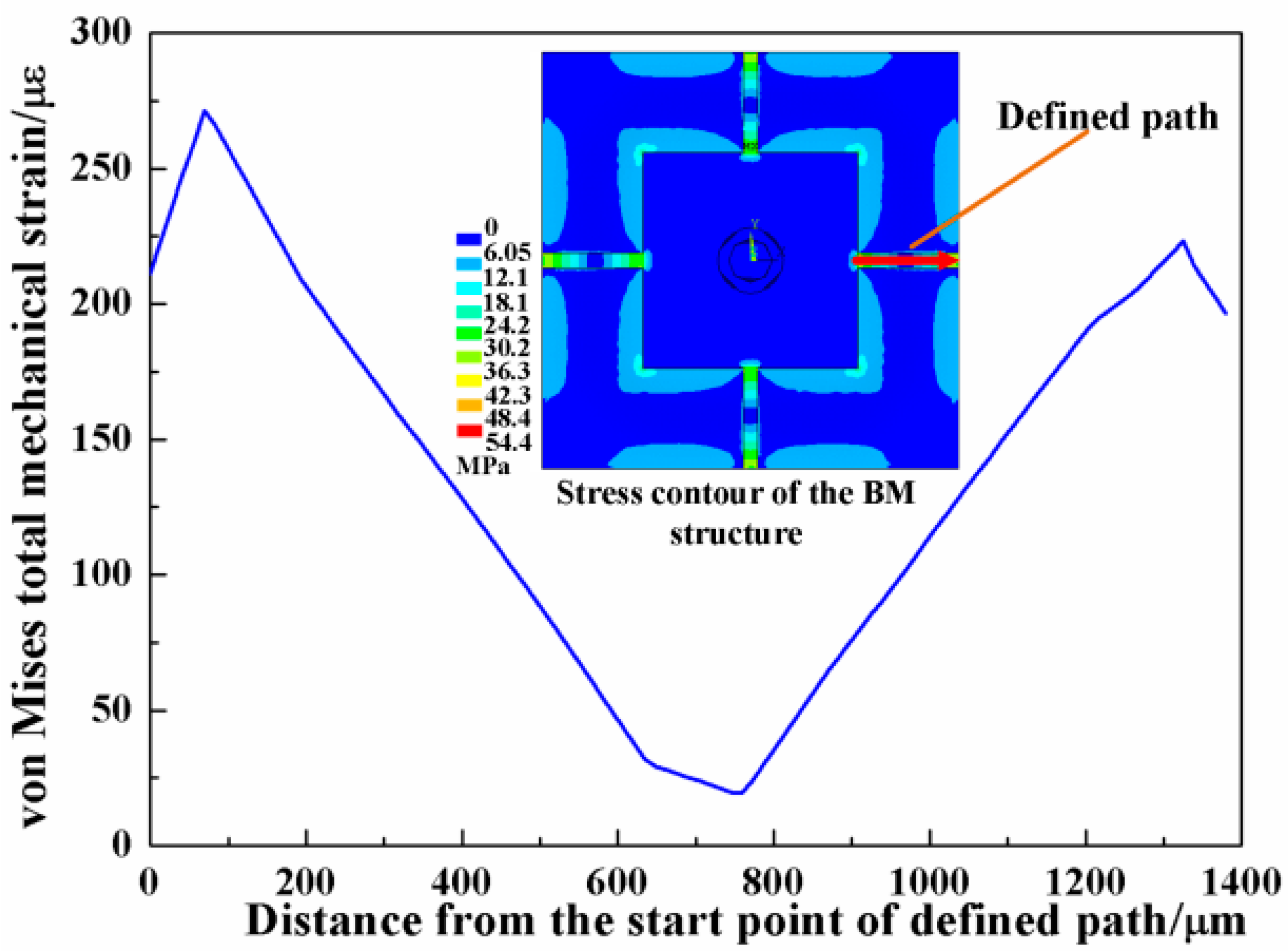
2.1. Design of Sensor Geometry
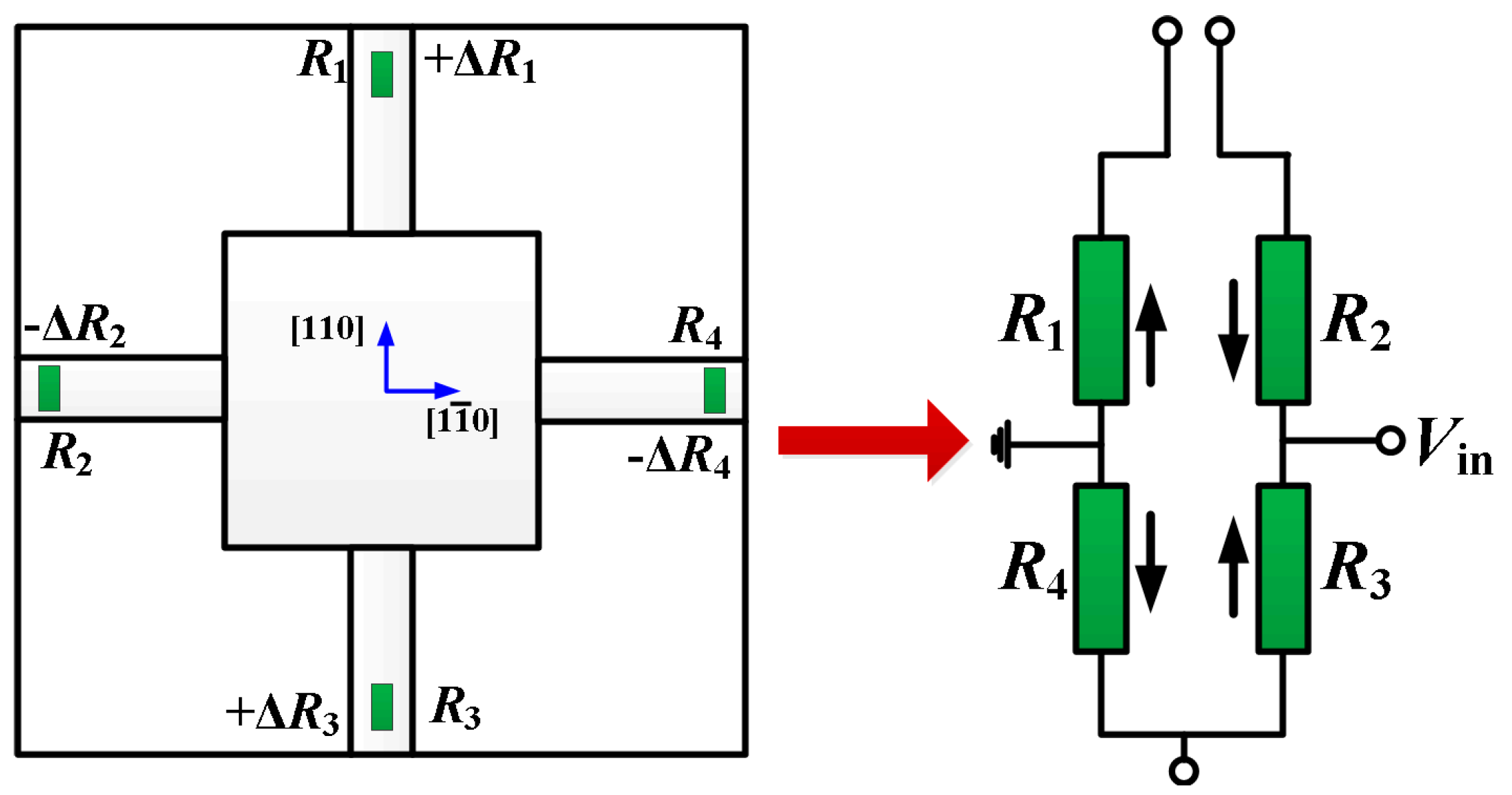
2.2. Design of Sensor Components
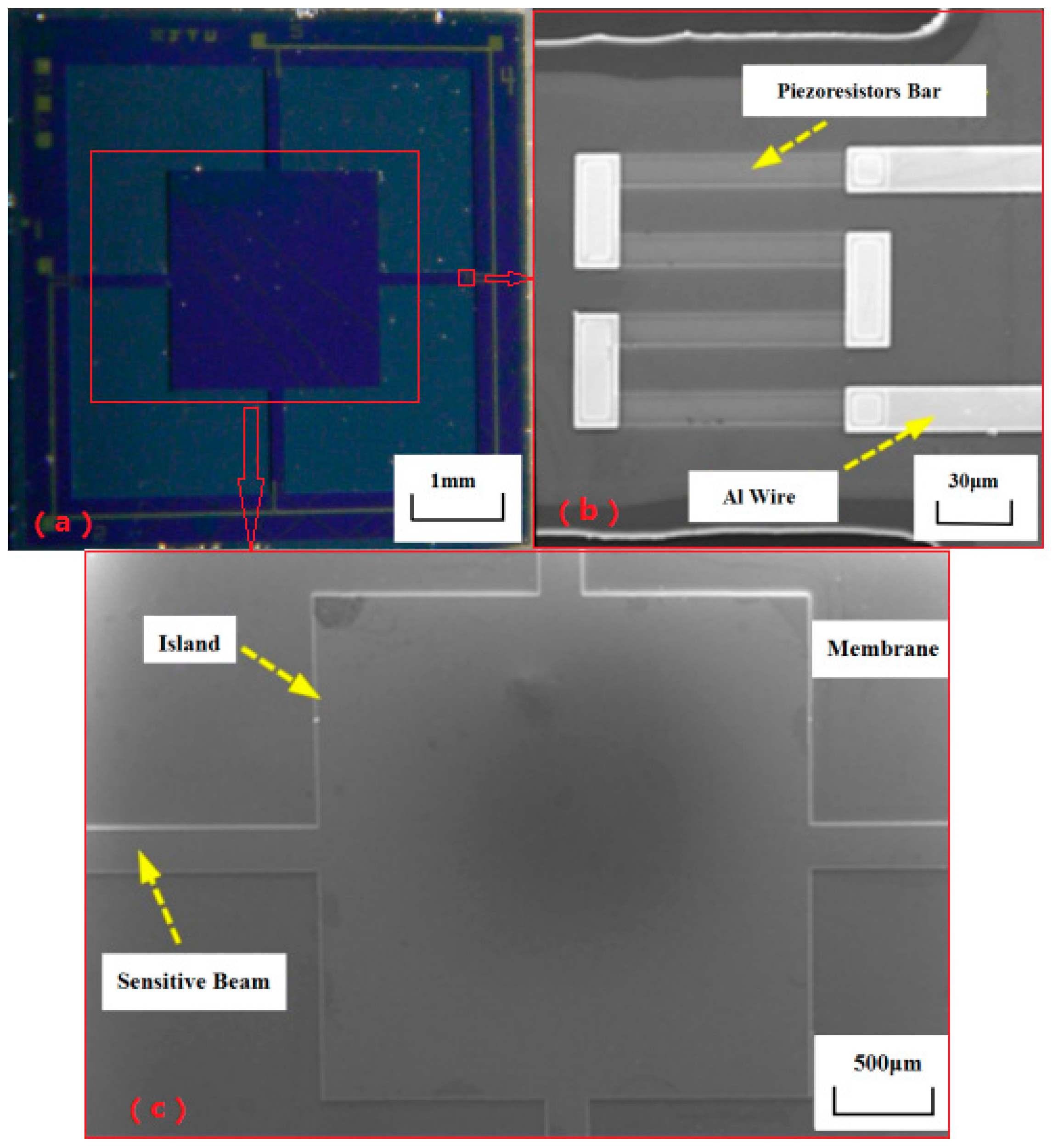
3. Sensor Realization
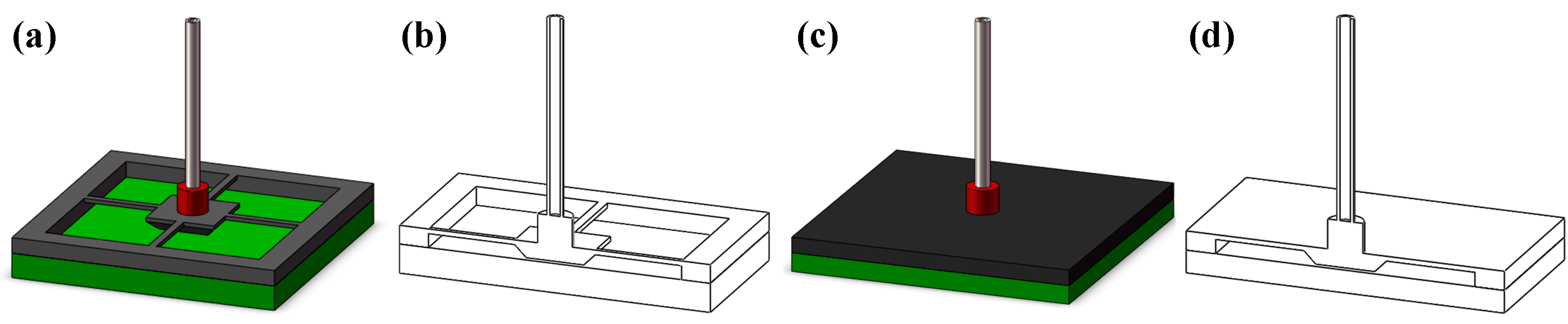
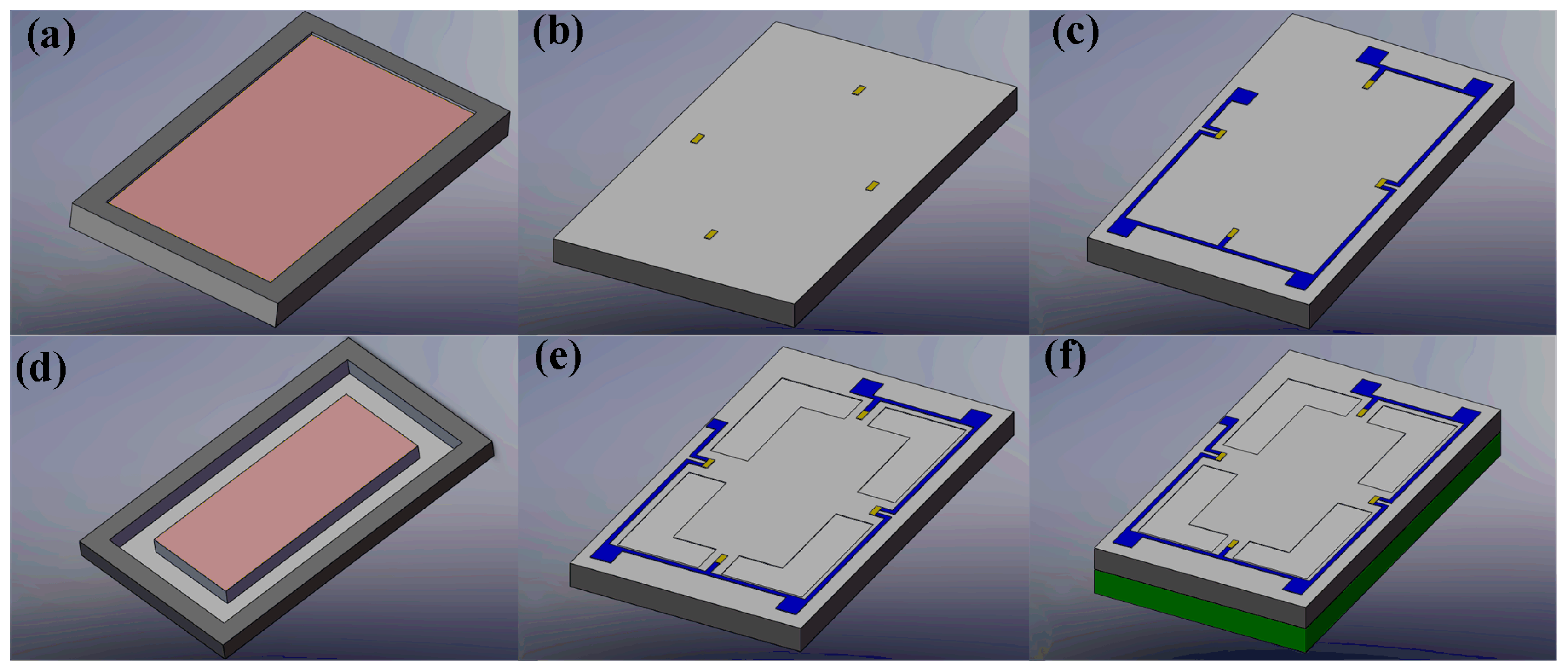
3.1. Fabrication
- (1)
- The fabrication began with the inductively coupled plasma (ICP) etching at the back side to form the working gap between the bottom of the central mesa and bonded glass (Figure 8a);
- (2)
- Then the boron ion diffusion and driven-in process were conducted after the piezoresistors were patterned on the front side (Figure 8b);
- (3)
- The interconnections of piezoresistors were realized by Al sputtering and the electrodes were simultaneously formed (Figure 8c);
- (4)
- The deposited Si3N4 and SiO2 were utilized as the protection layer for the following KOH etchant based anisotropic wet etching, and the central mesa was shaped by wet etching from the back side (Figure 8d);
- (5)
- The beam-membrane structure was formed by ICP etching on the front side (Figure 8e);
- (6)
- A Pyrex glass wafer was bonded onto the bottom of silicon wafer by anodic bonding (Figure 8f). A Cr/Au bi-layer was deposited on the glass wafer to avoid electrostatic adhesion between the mesa and glass during the bonding or overloaded process.
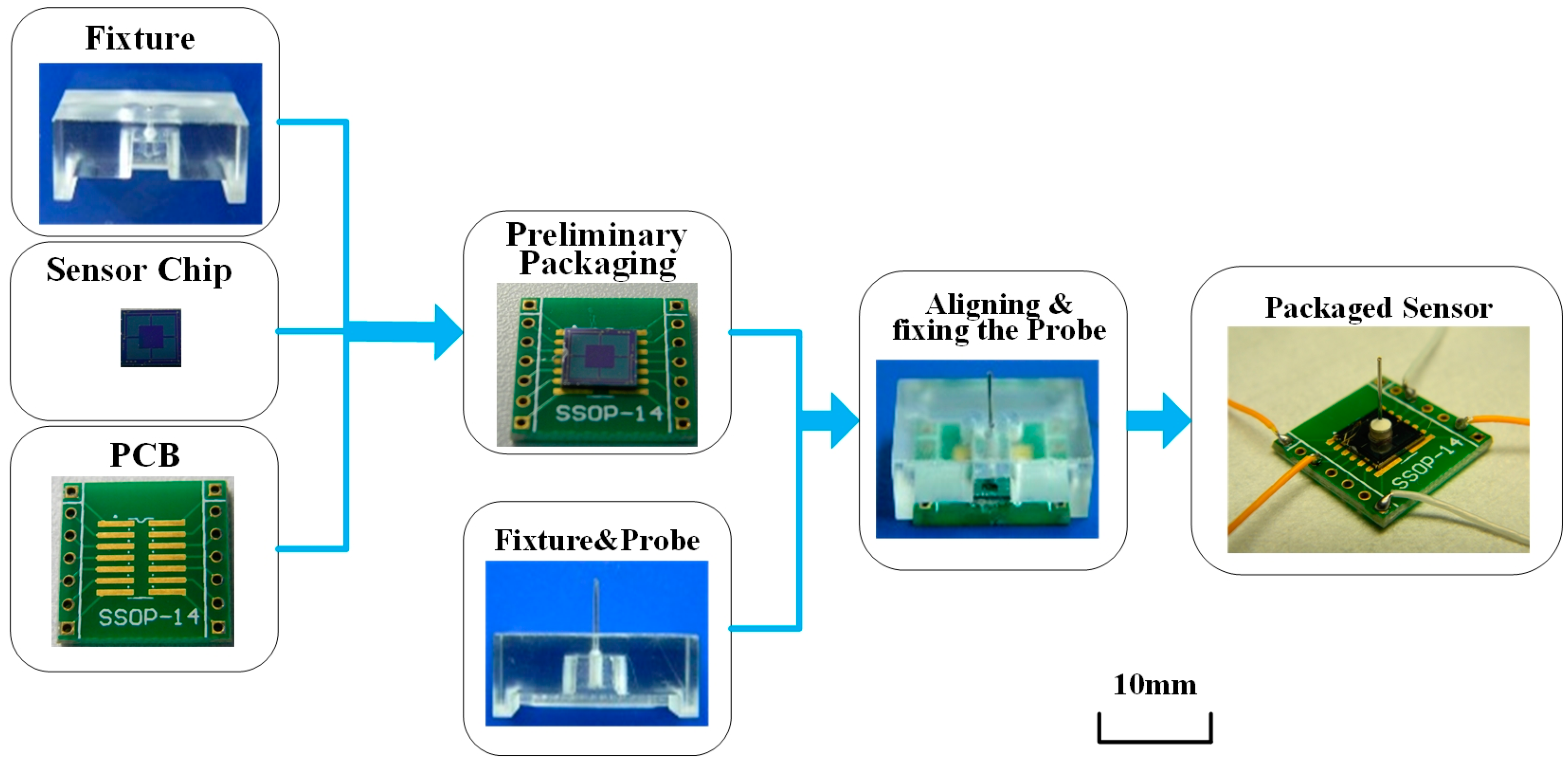
3.2. Sensor Packing
4. Sensor Testing
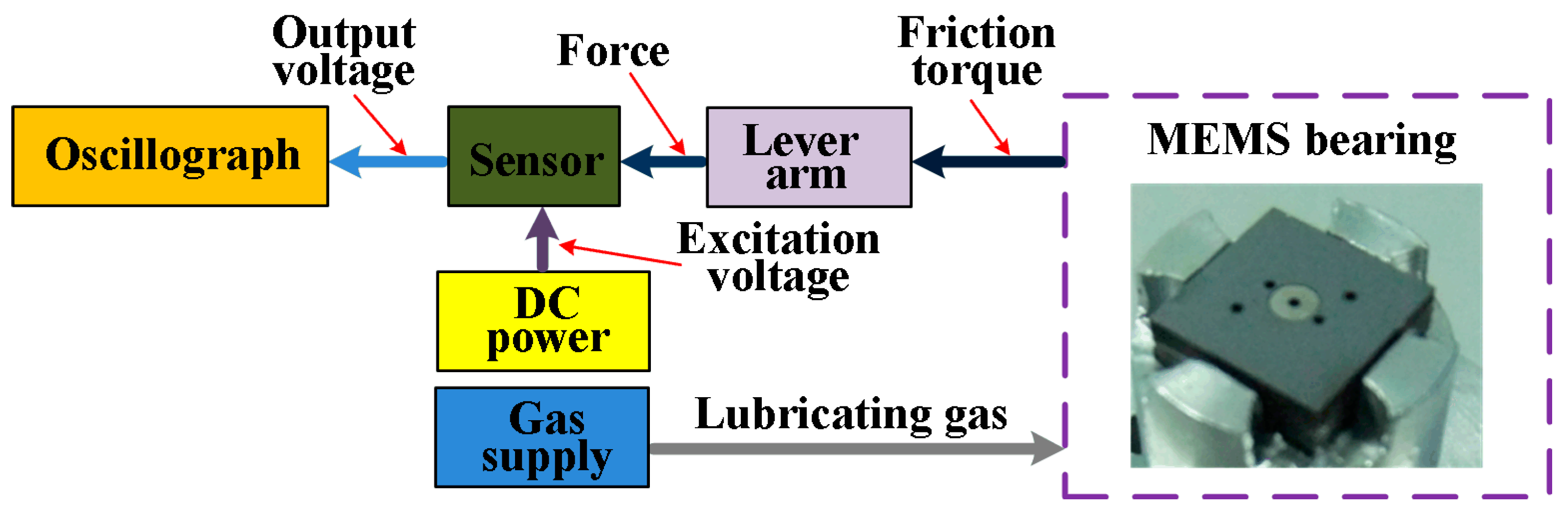
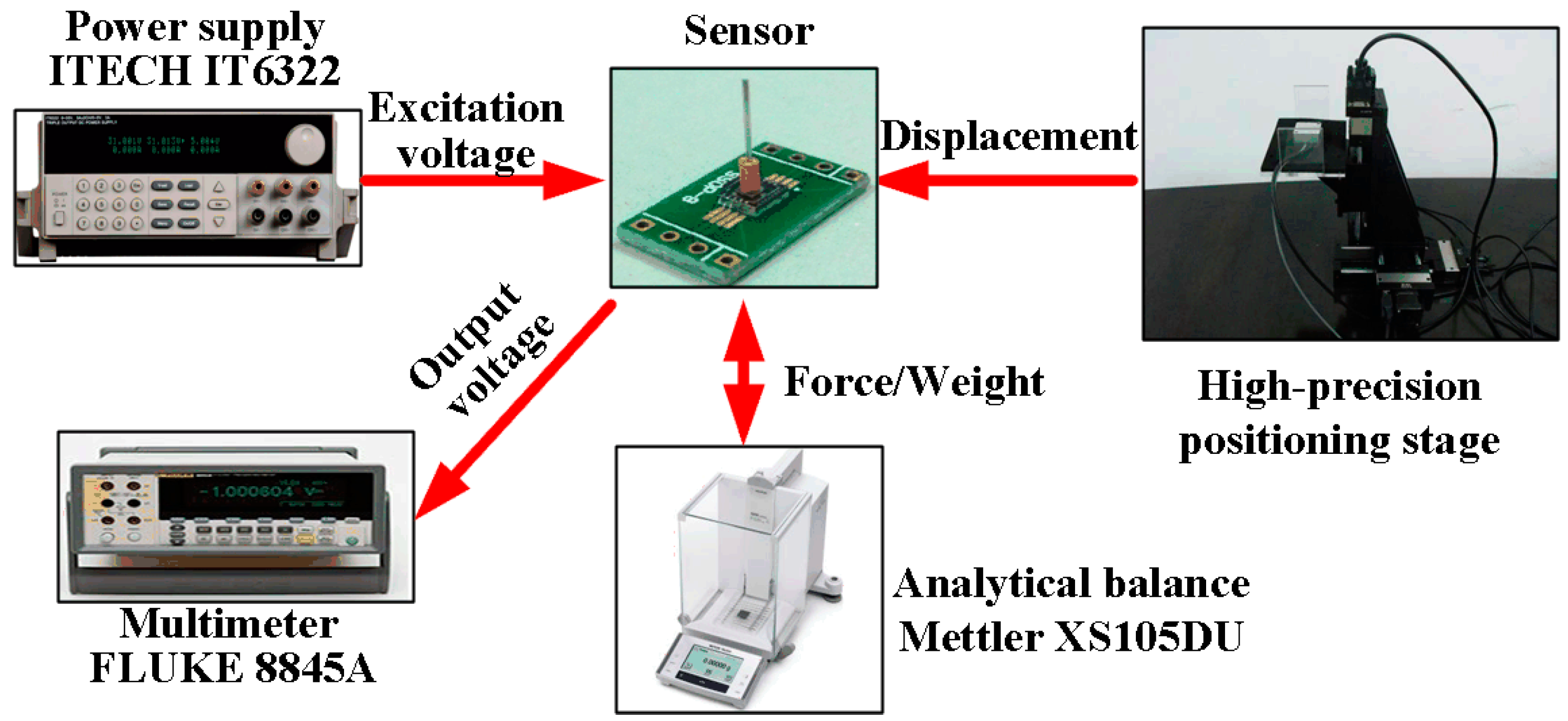
4.1. Experimental Setup
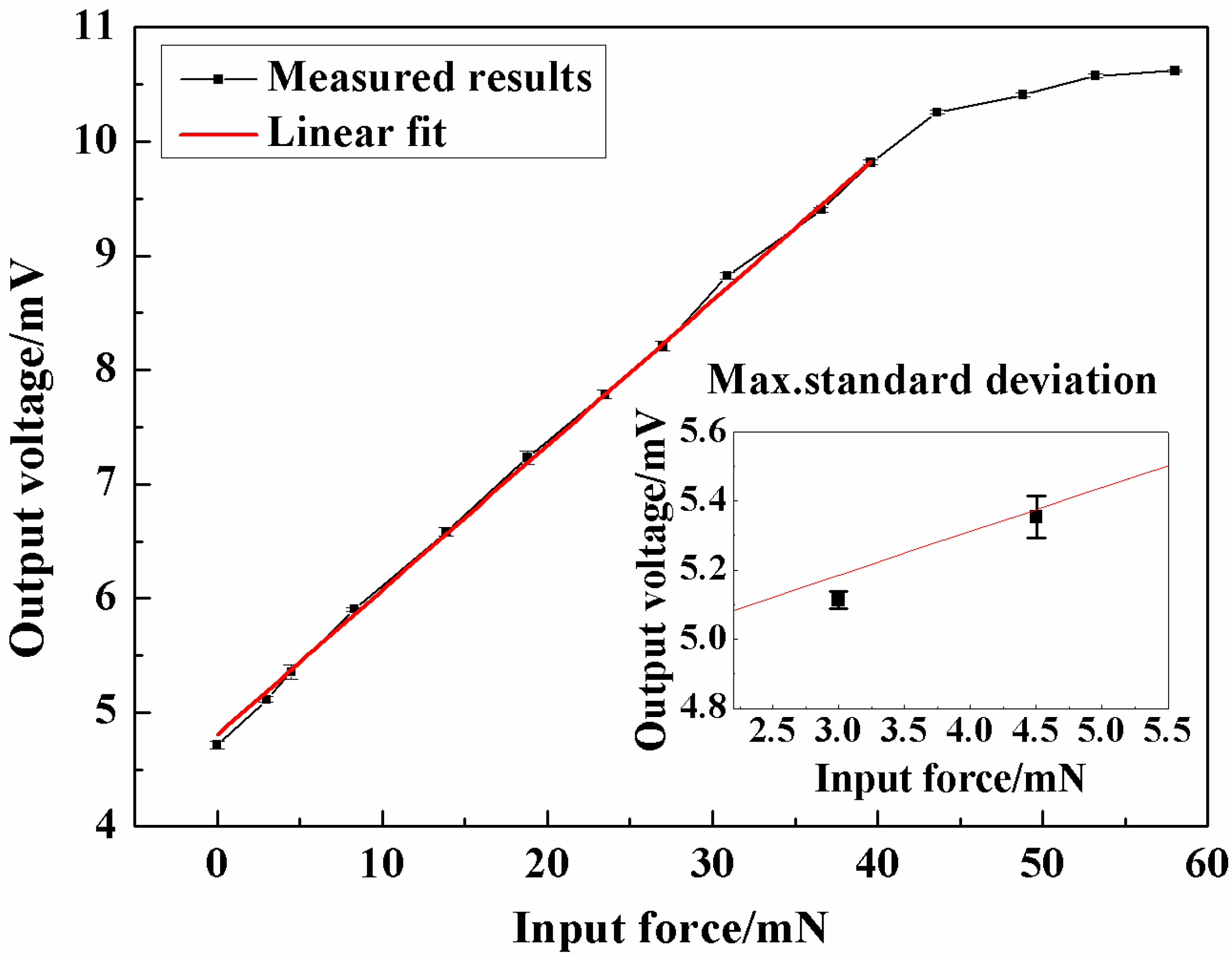
4.2. Results and Discussion
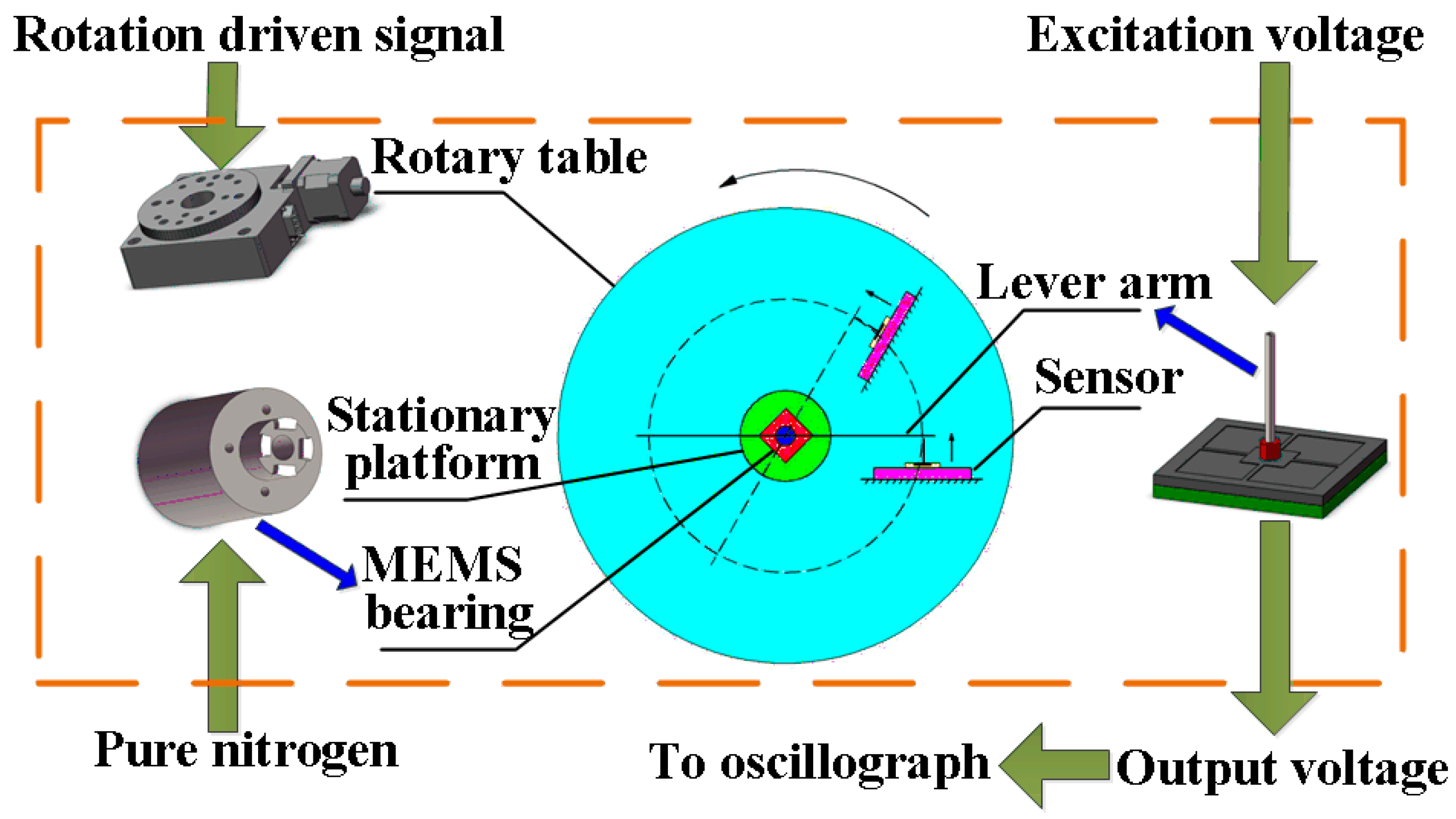
5. Sensor Application
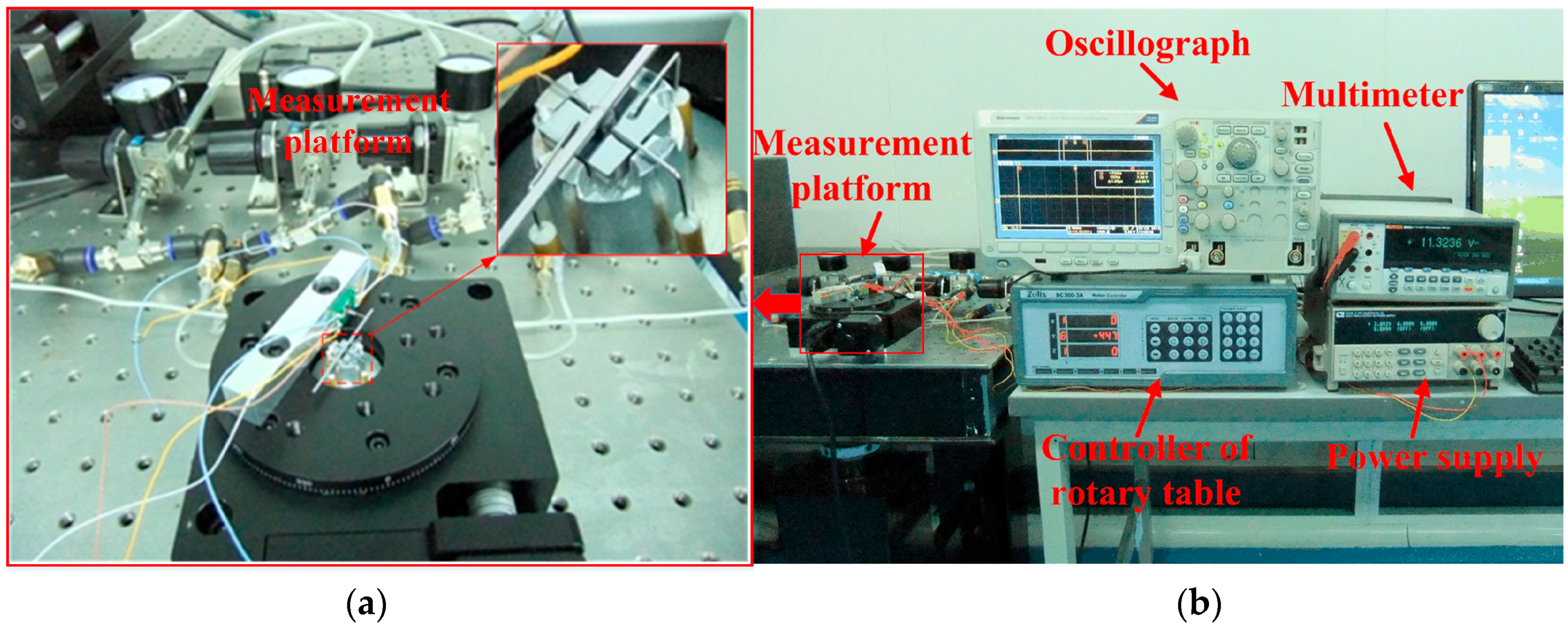
5.1. Experimental Setup
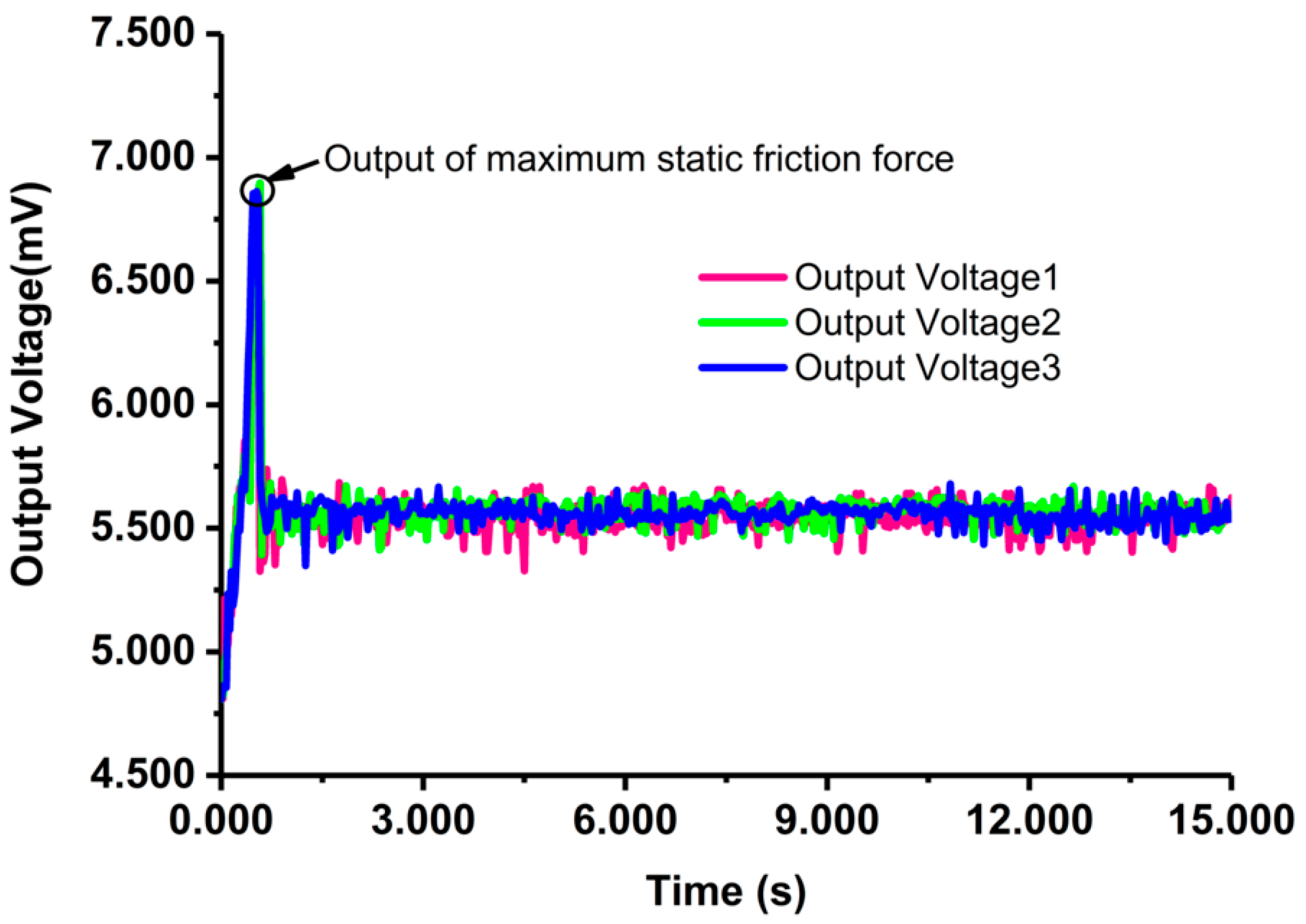
5.2. Results and Discussion
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Alan, H.E. Introduction to power MEMS. In Multi-Wafer Rotating MEMS Machines; Jeffrey, H.L., Ed.; Springer: New York, NY, USA, 2002; pp. 1–8. [Google Scholar]
- Kim, D.; Lee, S.; Jin, Y.; Desta, Y.; Bryant, M.D.; Goettert, J. Micro gas bearings fabricated by deep X-ray lithography. Microsyst. Technol. 2004, 10, 456–461. [Google Scholar] [CrossRef]
- Spakovszky, Z.S.; Liu, L.X. Scaling laws for ultra-short hydrostatic gas journal bearings. J. Vib. Acoust. 2005, 127, 254–261. [Google Scholar] [CrossRef]
- Lee, Y.-B.; Kwak, H.-D.; Kim, C.-H.; Lee, N.-S. Numerical prediction of slip flow effect on gas-lubricated journal bearings for MEMS/MST-based micro-rotating machinery. Tribol. Int. 2005, 38, 89–96. [Google Scholar] [CrossRef]
- Ling, R.; Ke-Qin, Z.; Xiao-Li, W. Effects of the slip velocity boundary condition on the characteristics of microbearings. J. Micromech. Microeng. 2004, 14, 116–124. [Google Scholar]
- Daejong, K.; Sanghoon, L.; Michael, D.B.; Frederick, F.L. Hydrodynamic performance of gas microbearings. J. Tribol. 2004, 126, 711–718. [Google Scholar]
- Ehrich, F.F.; Jacobsonm, S.A. Development of high-speed gas bearings for high-power density microdevices. J. Eng. Gas Turbines Power 2002, 125, 141–148. [Google Scholar] [CrossRef]
- Savoulides, N.; Breuer, K.S.; Jacobson, S.; Ehrich, F.F. Low-order models for very short hybrid gas bearings. J. Tribol. 2000, 123, 368–375. [Google Scholar] [CrossRef]
- Bouyer, J.; Fillon, M. Experimental measurement of the friction torque on hydrodynamic plain journal bearings during start-up. Tribol. Int. 2011, 44, 772–781. [Google Scholar] [CrossRef]
- McCarthy, M.; Waits, C.M.; Ghodssi, R. Dynamic friction and wear in a planar-contact encapsulated microball bearing using an integrated microturbine. J. Microelectromech. Syst. 2009, 18, 263–273. [Google Scholar] [CrossRef]
- Weizhong, W.; Yulong, Z.; Yafei, Q. A novel integrated multifunction micro-sensor for three-dimensional micro-force measurements. Sensors 2012, 12, 4051–4064. [Google Scholar]
- Zhai, J.; Karuppasamy, K.; Zvavanjanja, R.; Fisher, M.; Fisher, A.C.; Gould, D.; How, T. A sensor for needle puncture force measurement during interventional radiological procedures. Med. Eng. Phys. 2013, 35, 350–356. [Google Scholar] [CrossRef] [PubMed]
- Bian, T.; Yulong, Z.; Zhuangde, J. The novel structural design for pressure sensors. Sens. Rev. 2010, 30, 305–313. [Google Scholar]
- Jordan, A.; Büttgenbach, S. Micromechanical force sensors based on su-8 resist. Microsyst. Technol. 2012, 18, 1095–1101. [Google Scholar] [CrossRef]
- Palli, G.; Pirozzi, S. A miniaturized optical force sensor for tendon-driven mechatronic systems: Design and experimental evaluation. Mechatronics 2012, 22, 1097–1111. [Google Scholar] [CrossRef]
- Yoshikawa, G.; Akiyama, T.; Gautsch, S.; Vettiger, P.; Rohrer, H. Nanomechanical membrane-type surface stress sensor. Nano Lett. 2011, 11, 1044–1048. [Google Scholar] [CrossRef] [PubMed]
- Zoltán, S.S. High-speed gas bearings for microturbomahcinery. In Multi-Wafer Rotating MEMS Machines; Jeffrey, H.L., Ed.; Springer: New York, NY, USA, 2002; pp. 191–279. [Google Scholar]
- Yan, L.; Yulong, Z.; Sun, L. An improved structural design for accelerometers based on cantilever beam-mass structure. Sens. Rev. 2012, 32, 222–229. [Google Scholar] [CrossRef]
- Tian, B.; Zhao, Y.; Jiang, Z.; Zhang, L.; Liao, N.; Liu, Y.; Meng, C. Fabrication and structural design of micro pressure sensors for tire pressure measurement systems (TPMS). Sensors 2009, 9, 1382–1393. [Google Scholar] [CrossRef] [PubMed]
- Beerschwinger, U.; Reuben, R.L.; Yang, S.J. Friction study of micromotor bearings. Sens. Actuators A Phys. 1997, 63, 229–241. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Zero point offset (mV) | 4.805 |
| Full scale span (mV) | 9.885 |
| Sensitivity (mV/mN) | 0.127 |
| Nonlinearity (%FS) | 1.97 |
| Temperature Drift Factor (/°C) | −0.00628 |
| Time Drift (%FS/h) | 0.30473 |
| Hysteresis (%FS) | 0.548 |
| Repeatability (%FS) | 0.761 |
| Accuracy (%FS) | 2.13 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, H.; Yu, Z.; Liu, Y.; Fang, X. A Micro-Force Sensor with Beam-Membrane Structure for Measurement of Friction Torque in Rotating MEMS Machines. Micromachines 2017, 8, 304. https://doi.org/10.3390/mi8100304
Liu H, Yu Z, Liu Y, Fang X. A Micro-Force Sensor with Beam-Membrane Structure for Measurement of Friction Torque in Rotating MEMS Machines. Micromachines. 2017; 8(10):304. https://doi.org/10.3390/mi8100304
Chicago/Turabian StyleLiu, Huan, Zhongliang Yu, Yan Liu, and Xudong Fang. 2017. "A Micro-Force Sensor with Beam-Membrane Structure for Measurement of Friction Torque in Rotating MEMS Machines" Micromachines 8, no. 10: 304. https://doi.org/10.3390/mi8100304
APA StyleLiu, H., Yu, Z., Liu, Y., & Fang, X. (2017). A Micro-Force Sensor with Beam-Membrane Structure for Measurement of Friction Torque in Rotating MEMS Machines. Micromachines, 8(10), 304. https://doi.org/10.3390/mi8100304