
Multi-Response Optimization of Electrothermal Micromirror Using Desirability Function-Based Response Surface Methodology


Abstract
:1. Introduction
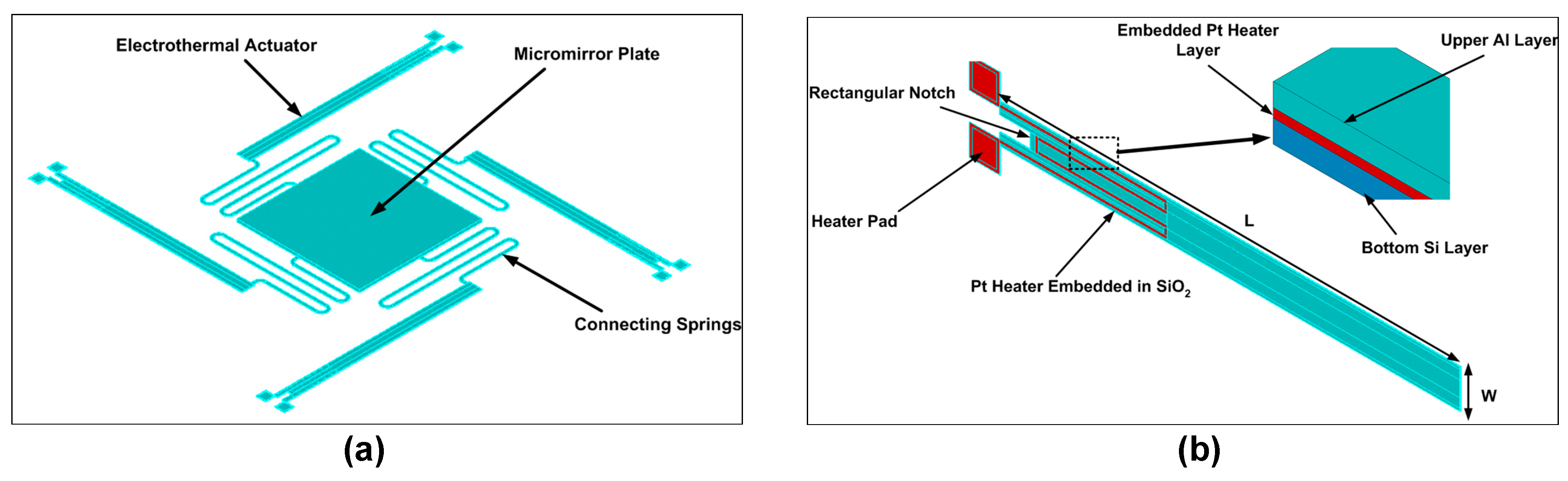
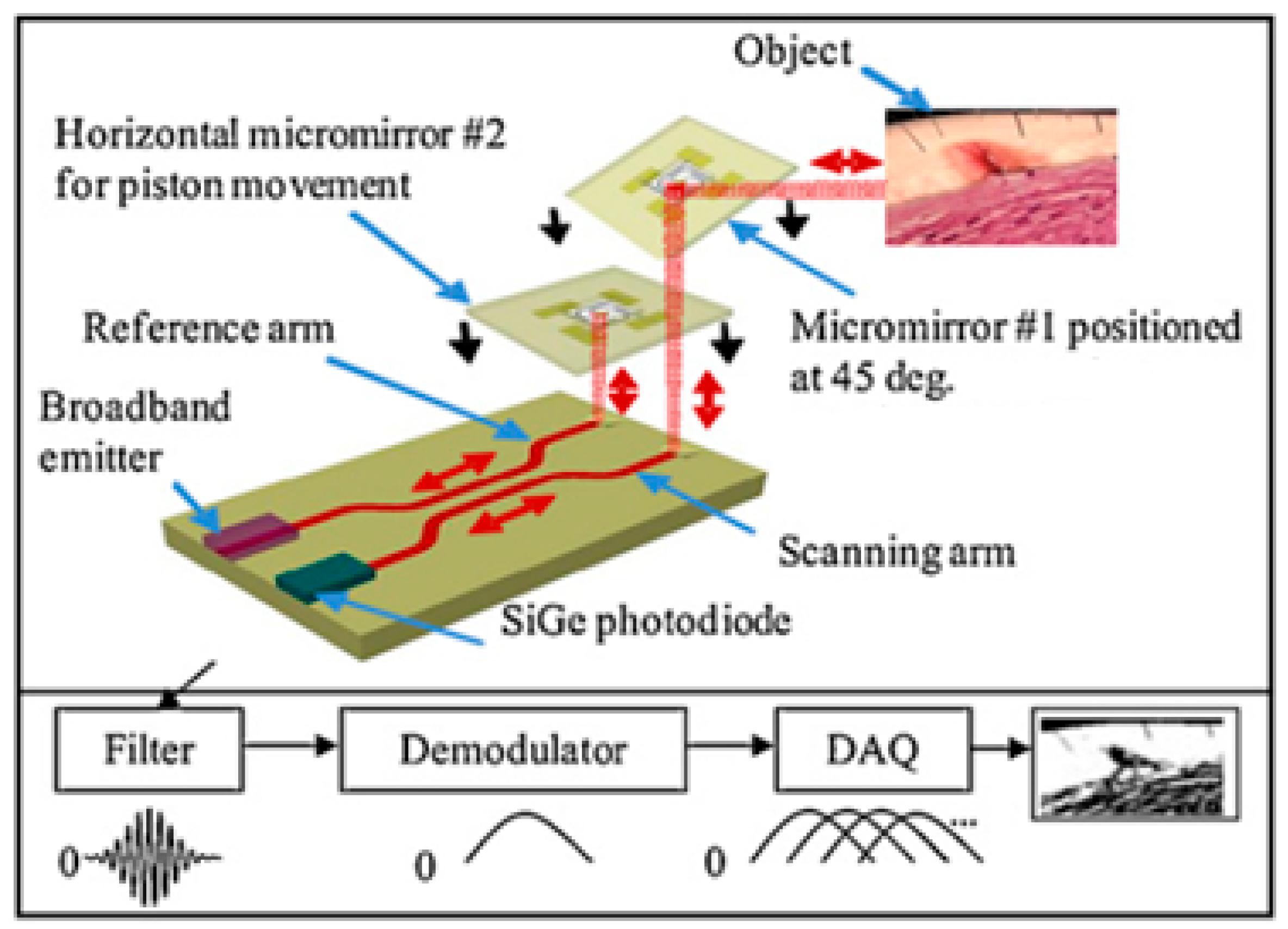
2. Design and Working Principle of the Proposed Micromirror
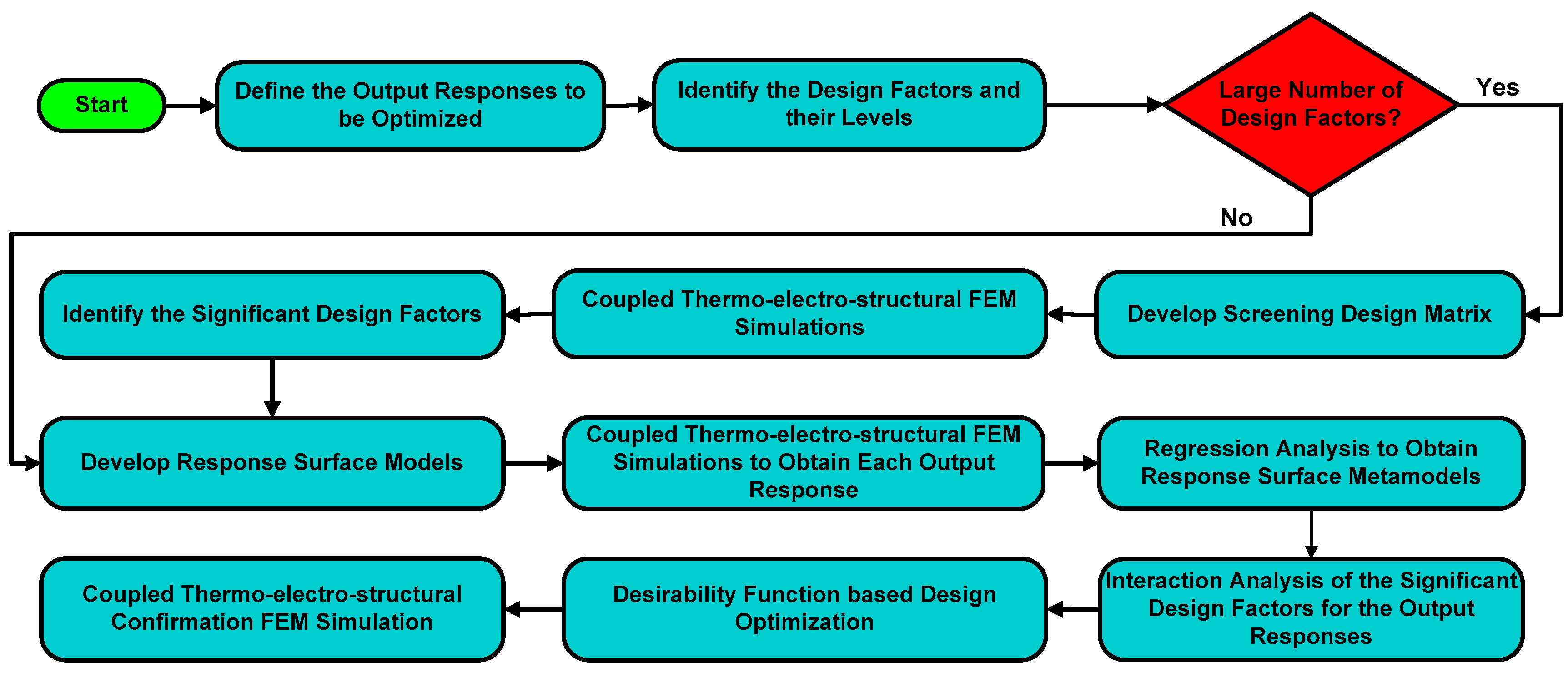
3. Micromirror Design Optimization Using Design of Experiments (DOE)
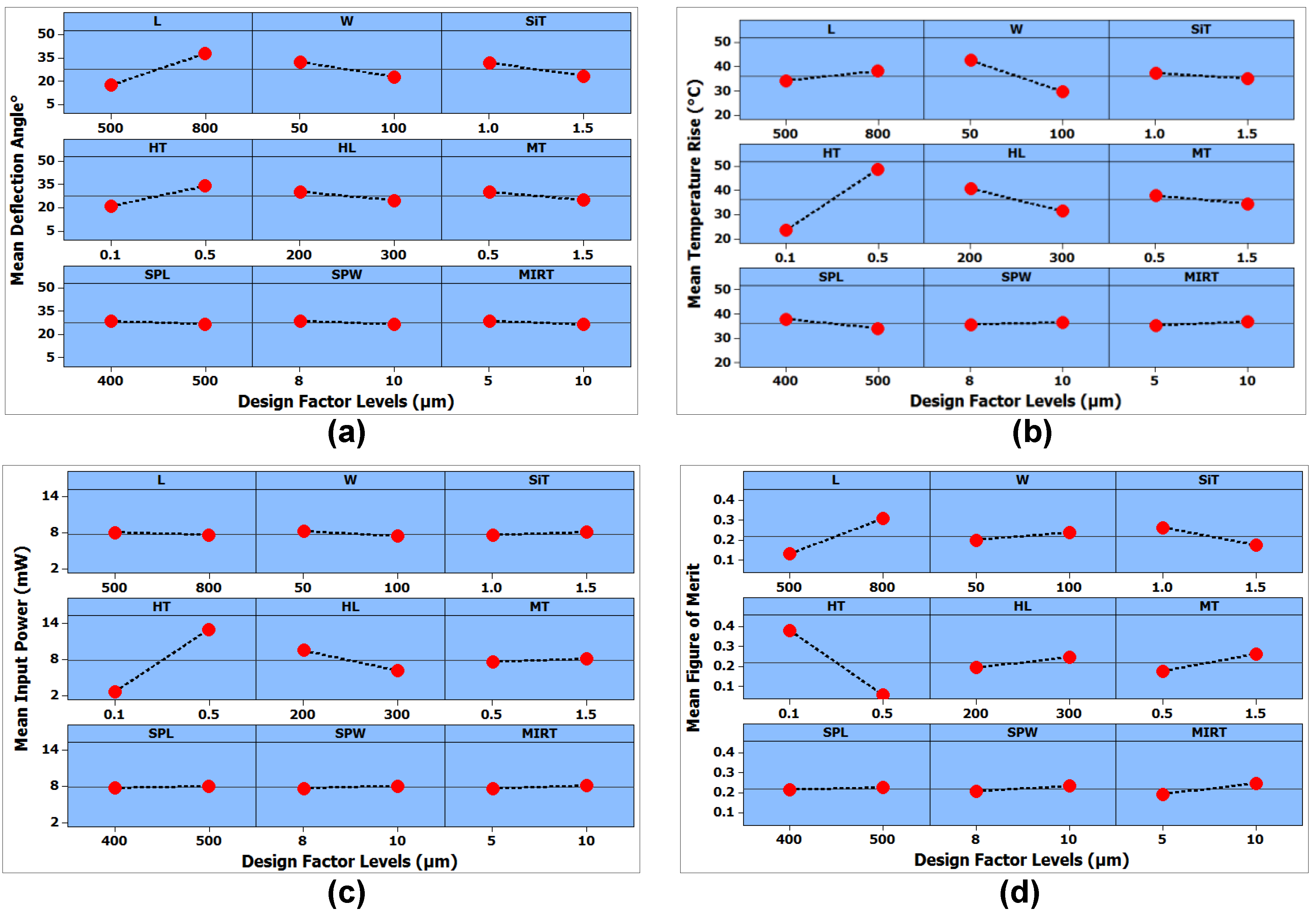
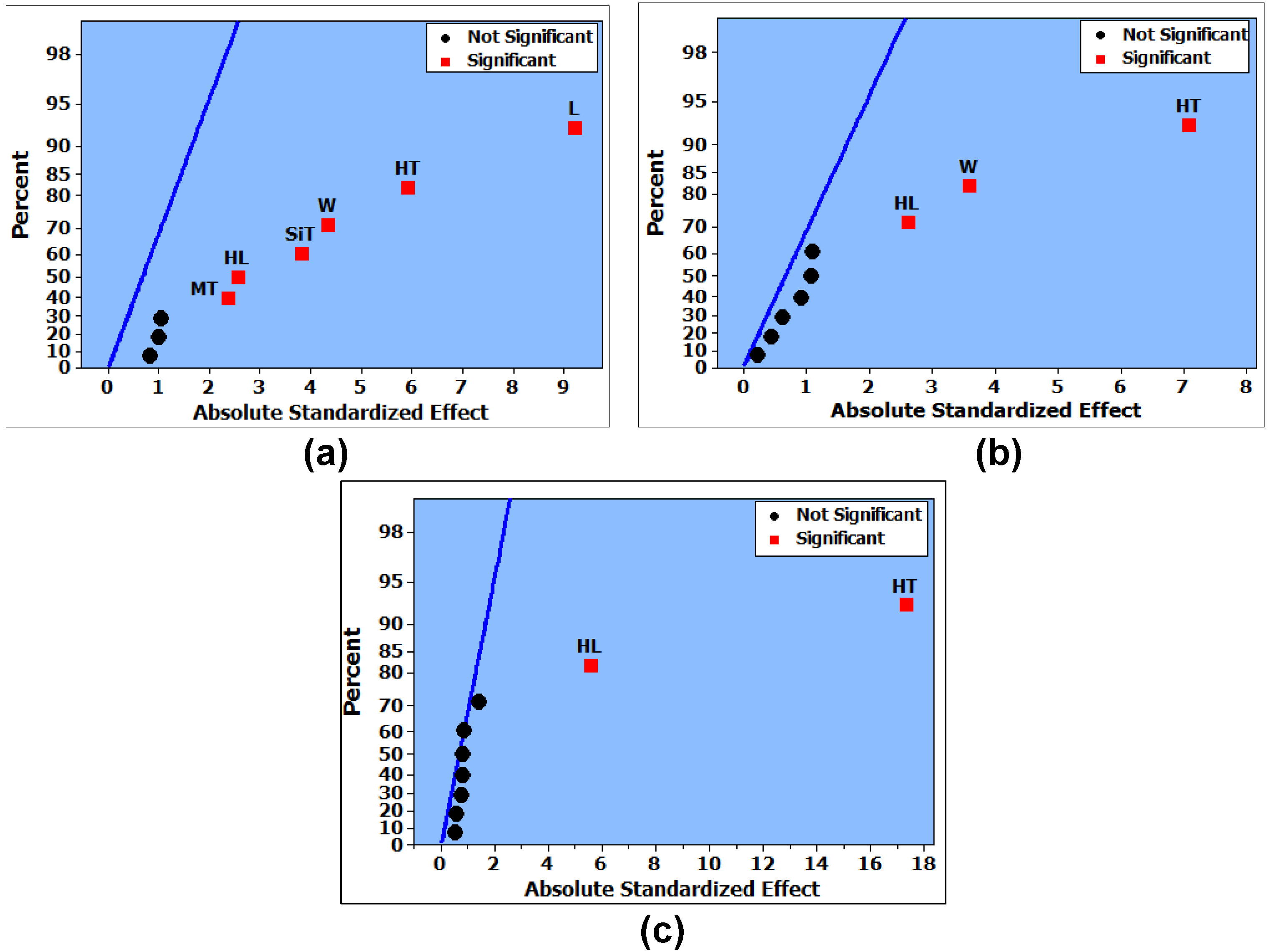
3.1. Screening Design Matrix for Significant Design Factors
3.2. Mean Effect Model and Analysis of Variance for the Screening Design
3.3. Design Matrix for Multi-Response Optimization
3.4. Regression Analysis for the CCD Design Matrix
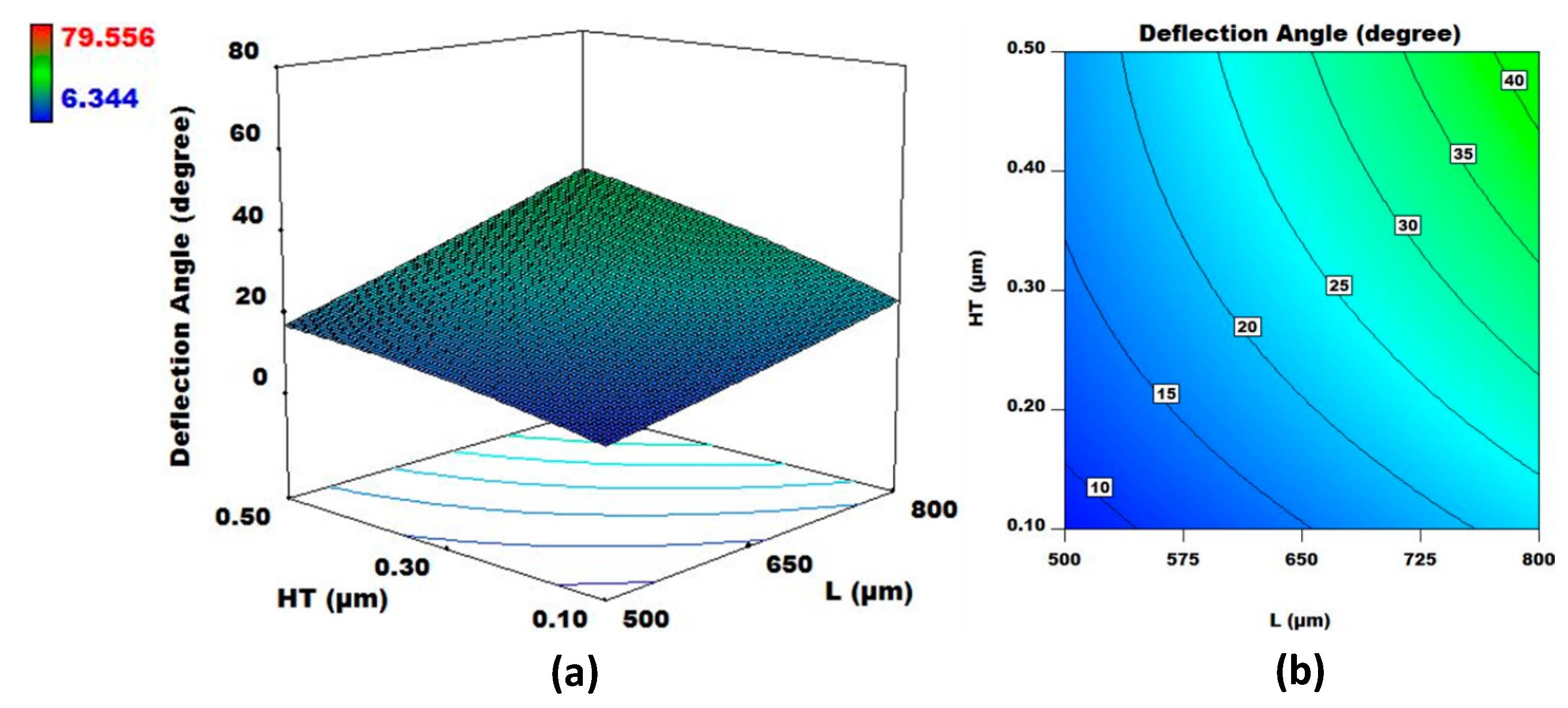
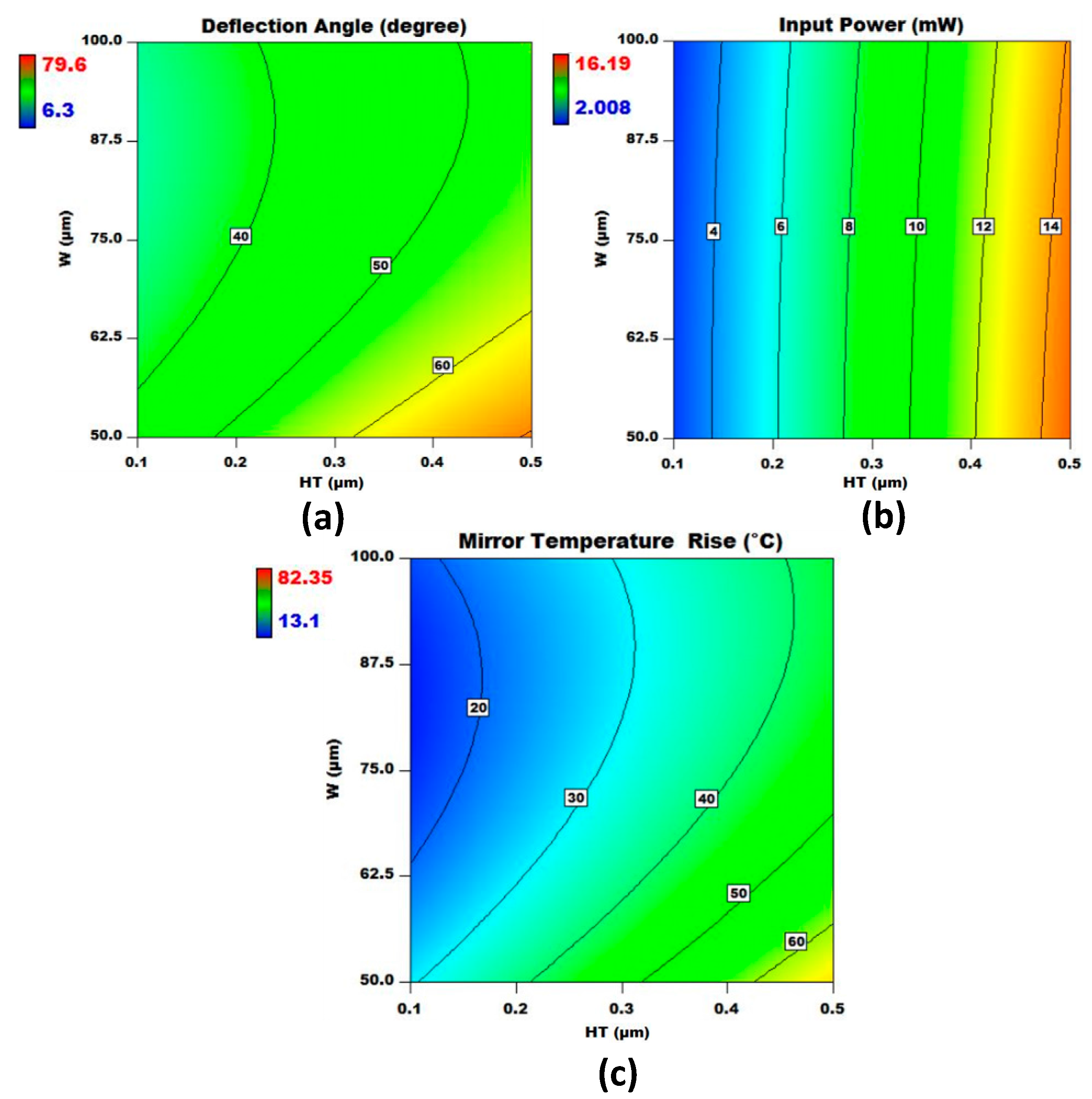
3.5. Interaction Analysis of the Design Factors for Angular Deflection
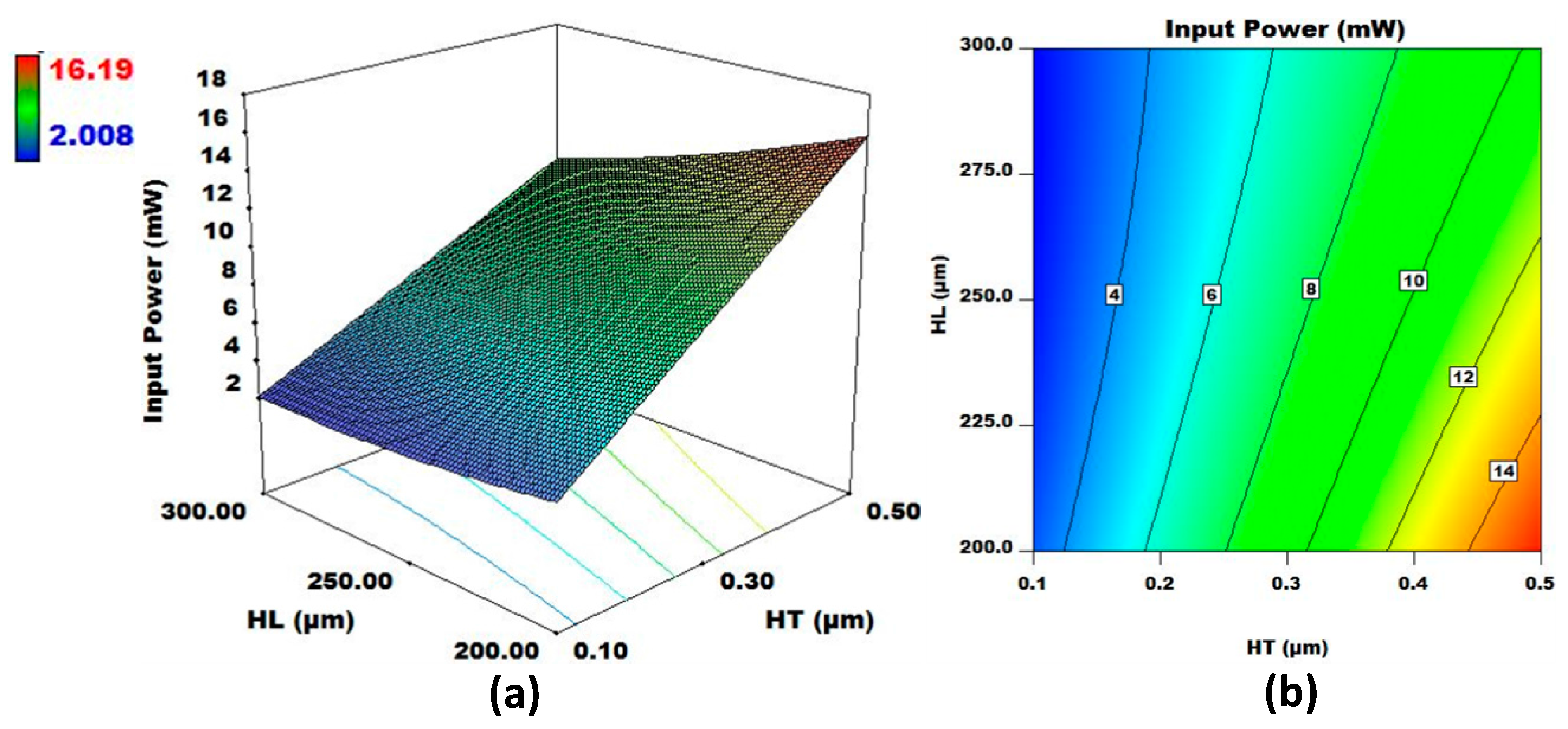
3.6. Interaction Analysis of the Design Factors for Input Power
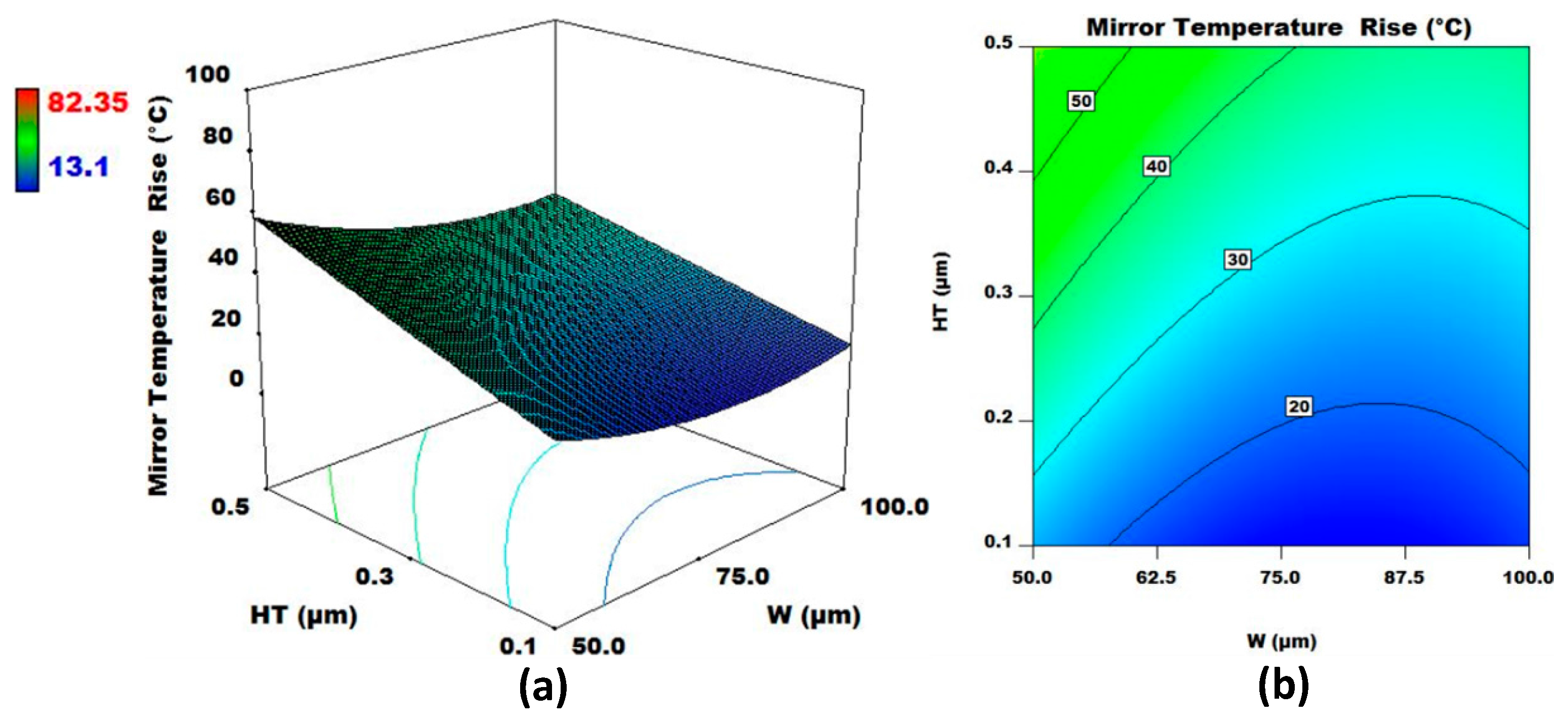
3.7. Interaction Analysis of the Design Factors for Temperature Rise
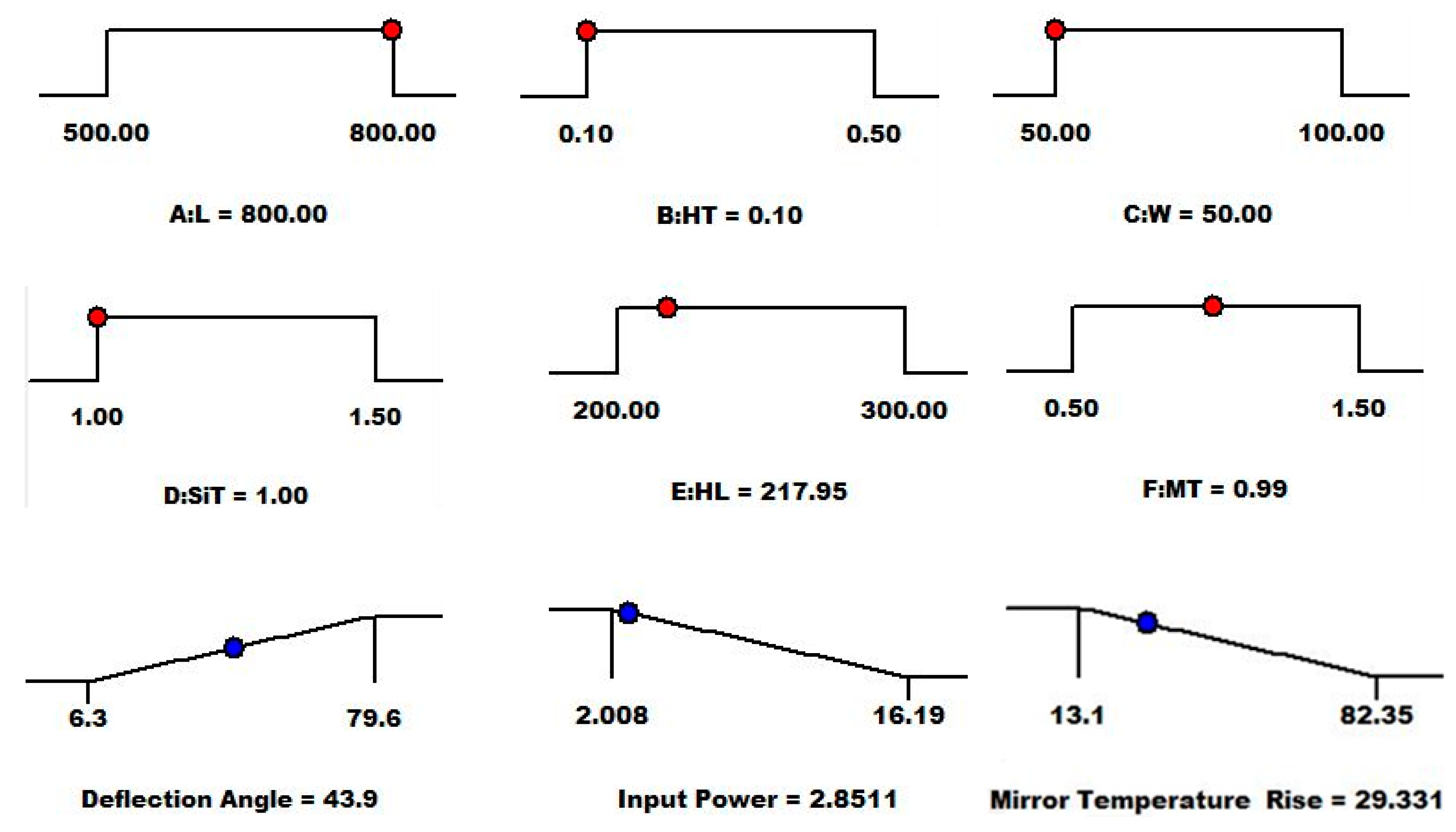
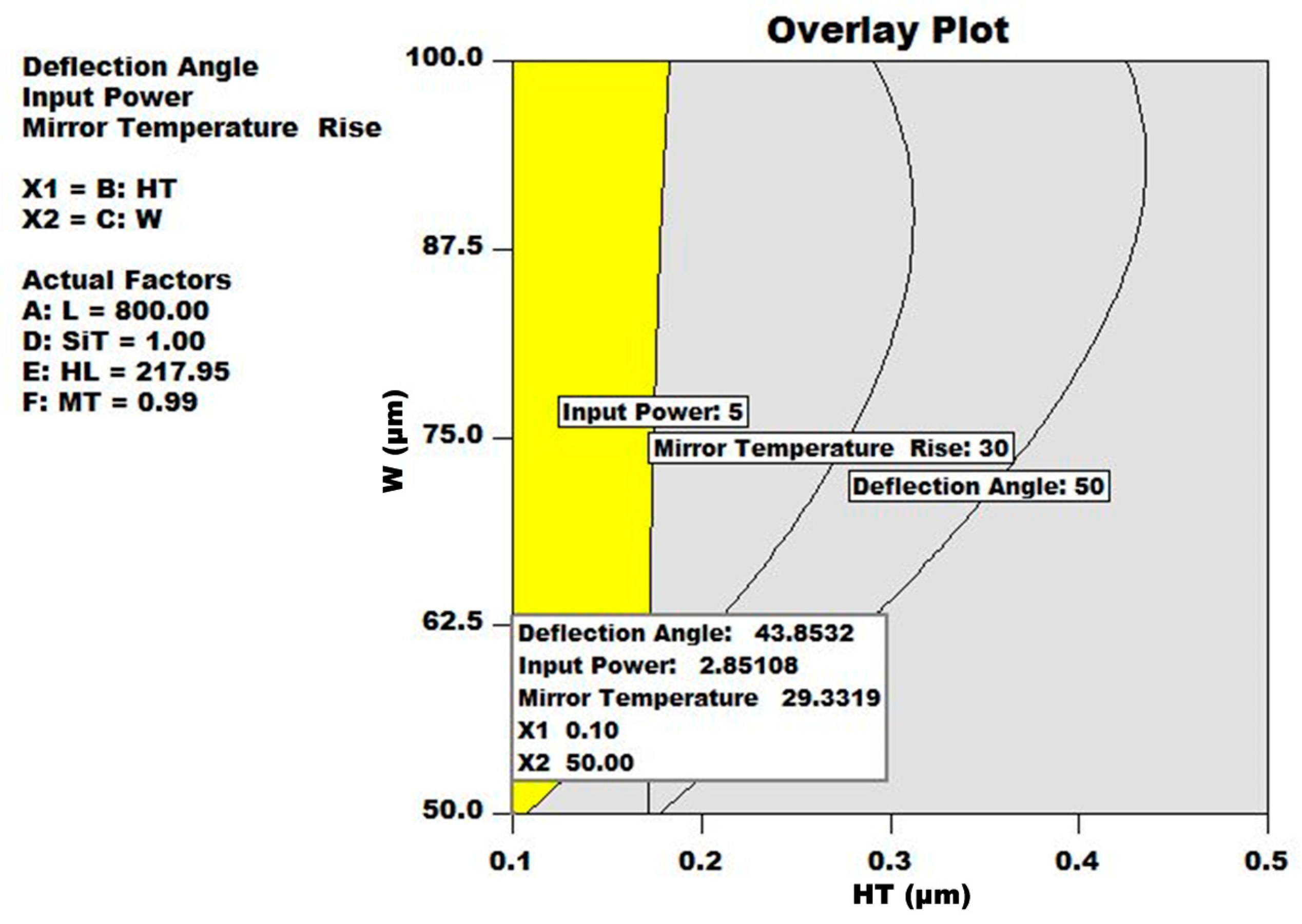
3.8. Multi-Response Optimization
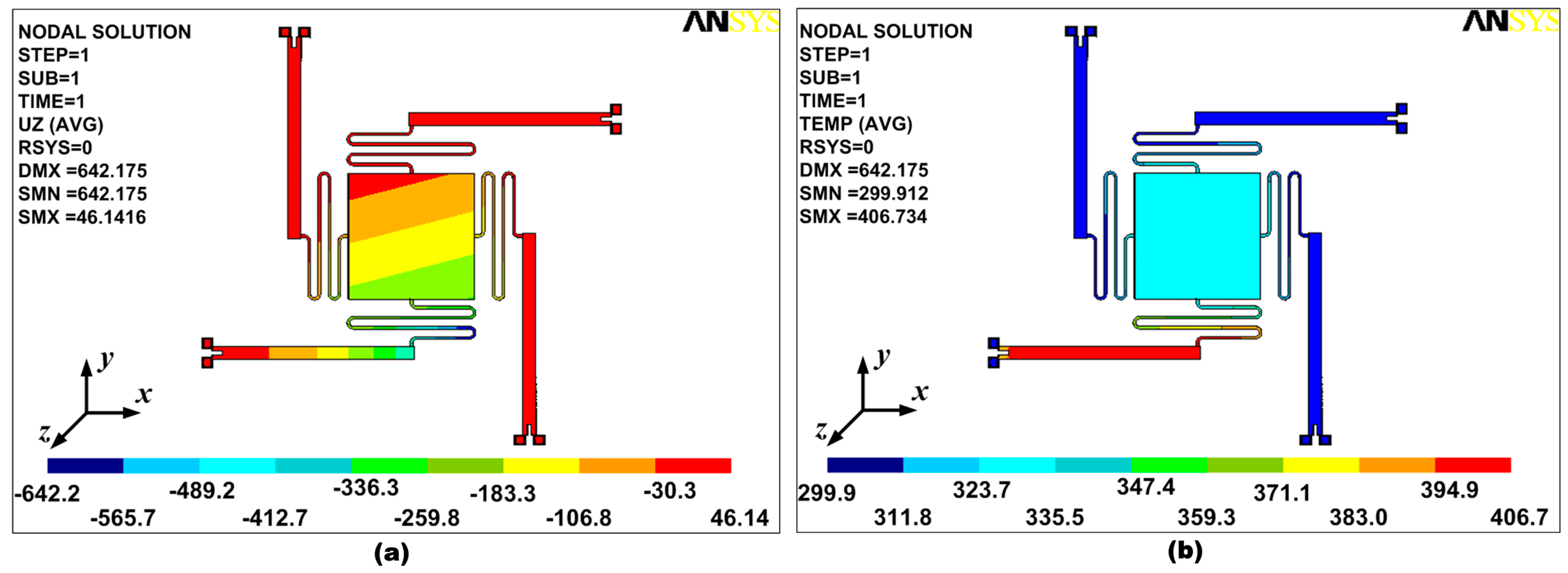
3.9. Verification of the Multi-Response Optimization
4. Discussion
5. Conclusions
Supplementary Materials
Supplementary File 1Acknowledgments
Author Contributions
Conflicts of Interest
References
- Tsai, C.H.; Tsai, J.C. MEMS optical switches and interconnects. Displays 2015, 37, 33–40. [Google Scholar] [CrossRef]
- Solgaard, O.; Godil, A.A.; Howe, R.T.; Lee, L.P.; Peter, Y.A.; Zappe, H. Optical MEMS: From micromirrors to complex systems. J. Microelectromech. Syst. 2014, 23, 517–538. [Google Scholar] [CrossRef]
- Chong, J.; He, S.; Mrad, R.B. Development of a vector display system based on a surface-micromachined micromirror. IEEE Trans. Ind. Electron. 2012, 59, 4863–4870. [Google Scholar] [CrossRef]
- Silva, G.; Carpignano, F.; Guerinoni, F.; Costantini, S.; De Fazio, M.; Merlo, S. Optical detection of the electromechanical response of MEMS micromirrors designed for scanning picoprojectors. IEEE J. Sel. Top. Quantum Electron. 2015, 21, 147–156. [Google Scholar] [CrossRef]
- Proll, K.P.; Nivet, J.M.; Körner, K.; Tiziani, H.J. Microscopic three-dimensional topometry with ferroelectric liquid-crystal-on-silicon displays. Appl. Opt. 2003, 42, 1773–1778. [Google Scholar] [CrossRef] [PubMed]
- Yalcinkaya, A.D.; Ergeneman, O.; Urey, H. Polymer magnetic scanners for bar code applications. Sens. Actuators A Phys. 2007, 135, 236–243. [Google Scholar] [CrossRef]
- Jung, W.; Zhang, J.; Wang, L.; Wilder-Smith, P.; Chen, Z.; McCormick, D.T.; Tien, N.C. Three-dimensional optical coherence tomography employing a 2-axis microelectromechanical scanning mirror. IEEE J. Sel. Top. Quantum Electron. 2005, 11, 806–810. [Google Scholar] [CrossRef]
- Pengwang, E.; Rabenorosoa, K.; Rakotondrabe, M.; Andreff, N. Scanning micromirror platform based on MEMS technology for medical application. Micromachines 2016, 7, 24. [Google Scholar] [CrossRef]
- Wang, K.; Nirmalathas, A.; Lim, C.; Skafidas, E.; Alameh, K. High-speed reconfigurable free-space card-to-card optical interconnects. IEEE Photonics J. 2012, 4, 1407–1419. [Google Scholar] [CrossRef]
- Lin, L.Y.; Keeler, E.G. Progress of MEMS scanning micromirrors for optical bio-imaging. Micromachines 2015, 11, 1675–1689. [Google Scholar] [CrossRef]
- Jain, A.; Qu, H.; Todd, S.; Xie, H. A thermal bimorph micromirror with large bi-directional and vertical actuation. Sens. Actuators A Phys. 2005, 122, 9–15. [Google Scholar] [CrossRef]
- Jia, K.; Pal, S.; Xie, H. An electrothermal tip-tilt-piston micromirror based on folded dual S-shaped bimorphs. J. Microelectromech. Syst. 2009, 18, 1004–1015. [Google Scholar]
- Adams, D.C.; Wang, Y.; Hariri, L.P.; Suter, M.J. Advances in endoscopic optical coherence tomography catheter designs. IEEE J. Sel. Top. Quantum Electron. 2016, 22, 210–221. [Google Scholar] [CrossRef]
- Pal, S.; Xie, H. A curved multimorph based electrothermal micromirror with large scan range and low drive voltage. Sens. Actuators A Phys. 2011, 170, 156–163. [Google Scholar] [CrossRef]
- Ogando, K.; La Forgia, N.; Zarate, J.J.; Pastoriza, H. Design and characterization of a fully compliant out-of-plane thermal actuator. Sens. Actuators A Phys. 2012, 183, 95–100. [Google Scholar] [CrossRef]
- Kim, Y.S.; Dagalakis, N.G.; Gupta, S.K. Creating large out-of-plane displacement electrothermal motion stage by incorporating beams with step features. J. Micromech. Microeng. 2013, 23, 055008. [Google Scholar] [CrossRef]
- Kim, D.H.; Park, Y.C.; Park, S. Design and fabrication of twisting-type thermal actuation mechanism for micromirrors. Sens. Actuators A Phys. 2010, 159, 79–87. [Google Scholar] [CrossRef]
- Zhang, X.; Zhou, L.; Xie, H. A fast, large-stroke electrothermal MEMS mirror based on Cu/W bimorph. Micromachines 2015, 12, 1876–1889. [Google Scholar] [CrossRef]
- Tsai, C.H.; Tsai, C.W.; Chang, H.T.; Liu, S.H.; Tsai, J.C. Electrothermally-actuated micromirrors with bimorph actuators—Bending-type and torsion-type. Sensors 2015, 15, 14745–14756. [Google Scholar] [CrossRef] [PubMed]
- Bühler, J.; Funk, J.; Paul, O.; Steiner, F.P.; Baltes, H. Thermally actuated CMOS micromirrors. Sens. Actuators A Phys. 1995, 47, 572–575. [Google Scholar] [CrossRef]
- Ataka, M.; Omodaka, A.; Takeshima, N.; Fujita, H. Fabrication and operation of polyimide bimorph actuators for a ciliary motion system. J. Microelectromech. Syst. 1993, 4, 146–150. [Google Scholar] [CrossRef]
- Yang, J.P.; Deng, X.C.; Chong, T.C. An electro-thermal bimorph-based microactuator for precise track-positioning of optical disk drives. J. Micromech. Microeng. 2005, 15, 958–965. [Google Scholar] [CrossRef]
- Jain, A.; Xie, H. A single-crystal silicon micromirror for large bi-directional 2D scanning applications. Sens. Actuators A Phys. 2006, 130, 454–460. [Google Scholar] [CrossRef]
- Singh, J.; Teo, J.H.S.; Xu, Y.; Premachandran, C.S.; Chen, N.; Kotlanka, R.; Olivo, M.; Sheppard, C.J.R. A two axes scanning SOI MEMS micromirror for endoscopic bioimaging. J. Micromech. Microeng. 2007, 18, 025001. [Google Scholar] [CrossRef]
- Xie, H.; Pan, Y.; Fedder, G.K. Endoscopic optical coherence tomographic imaging with a CMOS-MEMS micromirror. Sens. Actuators A Phys. 2003, 103, 237–241. [Google Scholar] [CrossRef]
- Izhar, U.; Izhar, A.B.; Tatic-Lucic, S. A multi-axis electrothermal micromirror for a miniaturized OCT system. Sens. Actuators A Phys. 2011, 167, 152–161. [Google Scholar] [CrossRef]
- Liu, L.; Pal, S.; Xie, H. MEMS mirrors based on a curved concentric electrothermal actuator. Sens. Actuators A Phys. 2012, 188, 349–358. [Google Scholar] [CrossRef]
- Zhang, X.; Zhang, R.; Koppal, S.; Butler, L.; Cheng, X.; Xie, H. MEMS mirrors submerged in liquid for wide-angle scanning. In Proceedings of the 18th IEEE International Conference on Solid-State Sensors, Actuators and Microsystems (TRANSDUCERS), Anchorage, AK, USA, 21–25 June 2015; pp. 847–850. [Google Scholar]
- Samuelson, S.R.; Xie, H. A large piston displacement MEMS mirror with electrothermal ladder actuator arrays for ultra-low tilt applications. J. Microelectromech. Syst. 2014, 23, 39–49. [Google Scholar] [CrossRef]
- Jang, K.W.; Yang, S.P.; Baek, S.H.; Lee, M.S.; Park, H.C.; Seo, Y.H.; Kim, M.H.; Jeong, K.H. Electrothermal MEMS parallel plate rotation for single-imager stereoscopic endoscopes. Opt. Express 2016, 24, 9667–9672. [Google Scholar] [CrossRef] [PubMed]
- Duan, C.; Tanguy, Q.; Pozzi, A.; Xie, H. Optical coherence tomography endoscopic probe based on a tilted MEMS mirror. Biomed. Opt. Express 2016, 7, 3345–3354. [Google Scholar] [CrossRef] [PubMed]
- Saleem, M.M.; Somà, A. Design optimization of RF-MEMS switch considering thermally induced residual stress and process uncertainties. Microelectron. Reliab. 2015, 55, 2284–2298. [Google Scholar] [CrossRef]
- Gimzewski, J.K.; Gerber, C.; Meyer, E.; Schlittler, R.R. Observation of a chemical reaction using a micromechanical sensor. Chem. Phys. Lett. 1994, 217, 589–594. [Google Scholar] [CrossRef]
- Plackett, R.L.; Burman, J.P. The design of optimum multifactorial experiments. Biometrika 1946, 33, 305–325. [Google Scholar] [CrossRef]
- Liew, L.A.; Tuantranont, A.; Bright, V.M. Modeling of thermal actuation in a bulk-micromachined CMOS micromirror. Microelectron. J. 2000, 31, 791–801. [Google Scholar] [CrossRef]
- Song, R.C.; Wang, G.L.; Wang, J.B.; Shen, Y.Y.; Lv, C. Design and Simulation of High Efficient MEMS Electrothermal Actuator. Key Eng. Mater. 2013, 562, 504–508. [Google Scholar] [CrossRef]
- Pan, C.S.; Hsu, W. An electro-thermally and laterally driven polysilicon microactuator. J. Micromech. Microeng. 1997, 7, 7–13. [Google Scholar] [CrossRef]
- Lerch, P.; Slimane, C.K.; Romanowicz, B.; Renaud, P. Modelization and characterization of asymmetrical thermal micro-actuators. J. Micromech. Microeng. 1996, 7, 7–13. [Google Scholar] [CrossRef]
- Todd, S.T.; Jain, A.; Qu, H.; Xie, H. A multi-degree-of-freedom micromirror utilizing inverted-series-connected bimorph actuators. J. Opt. A Pure Appl. Opt. 2006, 8, 352–359. [Google Scholar] [CrossRef]
- Ali, A.; Azim, R.A.; Khan, U.S.; Syed, A.A.; Izhar, U. Design, simulation and optimization of electrothermal micro actuator. Appl. Mech. Mater. 2012, 229, 1939–1943. [Google Scholar] [CrossRef]
- Montgomery, D.C. Design and Analysis of Experiments, 5th ed.; Wiley: New York, NY, USA, 1987. [Google Scholar]
- Anderson, T.W.; Darling, D.A. A test of goodness of fit. J. Am. Stat. Assoc. 1954, 49, 765–769. [Google Scholar] [CrossRef]
- Saleem, M.M.; Somá, A. Design of experiments based factorial design and response surface methodology for MEMS optimization. Microsyst. Technol. 2015, 21, 263–276. [Google Scholar] [CrossRef]
- Daniel, C. Use of Half-Normal Plots in Interpreting Factorial Two-Level Experiments. Technometrics 1959, 1, 311. [Google Scholar] [CrossRef]
- Myers, R.H.; Montgomery, D.C.; Anderson-Cook, C.M. Response Surface Methodology: Process and Product Optimization Using Designed Experiments; John Wiley & Sons: Hoboken, NJ, USA, 2016. [Google Scholar]
- Derringer, G.; Suich, R. Simultaneous optimization of several response variables. J. Q. Technol. 1980, 12, 214–219. [Google Scholar]
- Nelder, J.A.; Mead, R. A simplex method for function minimization. Comput. J. 1965, 7, 308–313. [Google Scholar] [CrossRef]
- Somà, A.; Saleem, M.M.; De Pasquale, G. Effect of creep in RF MEMS static and dynamic behavior. Microsyst. Technol. 2016, 22, 1067–1078. [Google Scholar] [CrossRef]
- Douglass, M.R. Lifetime estimates and unique failure mechanisms of the digital micromirror device (DMD). In Proceedings of the IEEE 36th Annual International Reliability Physics Symposium, Reno, NV, USA, 31 March–2 April 1998; pp. 9–16. [Google Scholar]
- Mu, X.; Sun, W.; Feng, H.; Yu, A.; Chen, K.W.S.; Fu, C.Y.; Olivo, M. MEMS micromirror integrated endoscopic probe for optical coherence tomography bioimaging. Sens. Actuators A Phys. 2011, 168, 202–212. [Google Scholar] [CrossRef]
- Bauer, R.; Li, L.; Uttamchandani, D. Dynamic properties of angular vertical comb-drive scanning micromirrors with electrothermally controlled variable offset. J. Microelectromech. Syst. 2014, 23, 999–1008. [Google Scholar] [CrossRef]
- Somà, A.; Saleem, M.M. Modeling and experimental verification of thermally induced residual stress in RF-MEMS. J. Micromech. Microeng. 2015, 25, 055007. [Google Scholar] [CrossRef]
- Somà, A.; De Pasquale, G. MEMS mechanical fatigue: Experimental results on gold microbeams. J. Microelectromech. Syst. 2009, 18, 828–835. [Google Scholar] [CrossRef]
- Myers, R.H.; Carter, W.H. Response surface techniques for dual response systems. Technometrics 1973, 15, 301–317. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Code | Design Factor (μm) | Low Level (−1) | High Level (+1) |
|---|---|---|---|
| X1 | Actuator Length (L) | 500 | 800 |
| X2 | Actuator Width (W) | 50 | 100 |
| X3 | Silicon Thickness (SiT) | 1 | 1.5 |
| X4 | Heater Thickness (HT) | 0.1 | 0.5 |
| X5 | Heater Length (HL) | 200 | 300 |
| X6 | Metal Thickness (MT) | 0.5 | 1.5 |
| X7 | Spring Length (SpL) | 400 | 500 |
| X8 | Spring Width (SpW) | 8 | 10 |
| X9 | Mirror Thickness (MIRT) | 5 | 10 |
| Material Properties | Aluminum | Platinum | Silicon | Silicon Dioxide |
|---|---|---|---|---|
| Young’s modulus (GPa) | 70 | 170 | 162 | 70 |
| Poisson ratio | 0.33 | 0.38 | 0.22 | 0.17 |
| Density (kg/µm3) | 2.3 × 10−15 | 21.4 × 10−15 | 2.32 × 10−15 | 2.66 × 10−15 |
| Specific heat (pJ/kg K) | 9.02 × 1014 | 1.3 ×1 014 | 7.53 × 1014 | 10 × 1014 |
| Resistivity (TΩ·µm) | 2.83 × 10−14 | 10.9 × 10−14 | 1.32 × 10−14 | 1.0 × 1010 |
| CTE (1/K) | 23.1 × 10−6 | 8.8 × 10−6 | 2.66 × 10−6 | 0.5 × 10−6 |
| Thermal conductivity (pW/µm K) | 23.7 × 107 | 7.1 × 107 | 1.5 × 108 | 0.1 × 107 |
| Code | Design Factor (um) | Low Level (−1) | Medium Level (0) | High Level (+1) |
|---|---|---|---|---|
| X1 | Actuator Length (L) | 500 | 650 | 800 |
| X2 | Heater Thickness (HT) | 0.1 | 0.3 | 0.5 |
| X3 | Actuator Width (W) | 50 | 75 | 100 |
| X4 | Silicon Thickness (SiT) | 1.0 | 1.25 | 1.5 |
| X5 | Heater Length (HL) | 200 | 250 | 300 |
| X6 | Metal Thickness (MT) | 0.5 | 1.0 | 1.5 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Saleem, M.M.; Farooq, U.; Izhar, U.; Khan, U.S. Multi-Response Optimization of Electrothermal Micromirror Using Desirability Function-Based Response Surface Methodology. Micromachines 2017, 8, 107. https://doi.org/10.3390/mi8040107
Saleem MM, Farooq U, Izhar U, Khan US. Multi-Response Optimization of Electrothermal Micromirror Using Desirability Function-Based Response Surface Methodology. Micromachines. 2017; 8(4):107. https://doi.org/10.3390/mi8040107
Chicago/Turabian StyleSaleem, Muhammad Mubasher, Umar Farooq, Umer Izhar, and Umar Shahbaz Khan. 2017. "Multi-Response Optimization of Electrothermal Micromirror Using Desirability Function-Based Response Surface Methodology" Micromachines 8, no. 4: 107. https://doi.org/10.3390/mi8040107
APA StyleSaleem, M. M., Farooq, U., Izhar, U., & Khan, U. S. (2017). Multi-Response Optimization of Electrothermal Micromirror Using Desirability Function-Based Response Surface Methodology. Micromachines, 8(4), 107. https://doi.org/10.3390/mi8040107