
The Exploration for an Appropriate Vacuum Level for Performance Enhancement of a Comb-Drive Microscanner



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Materials and Methods
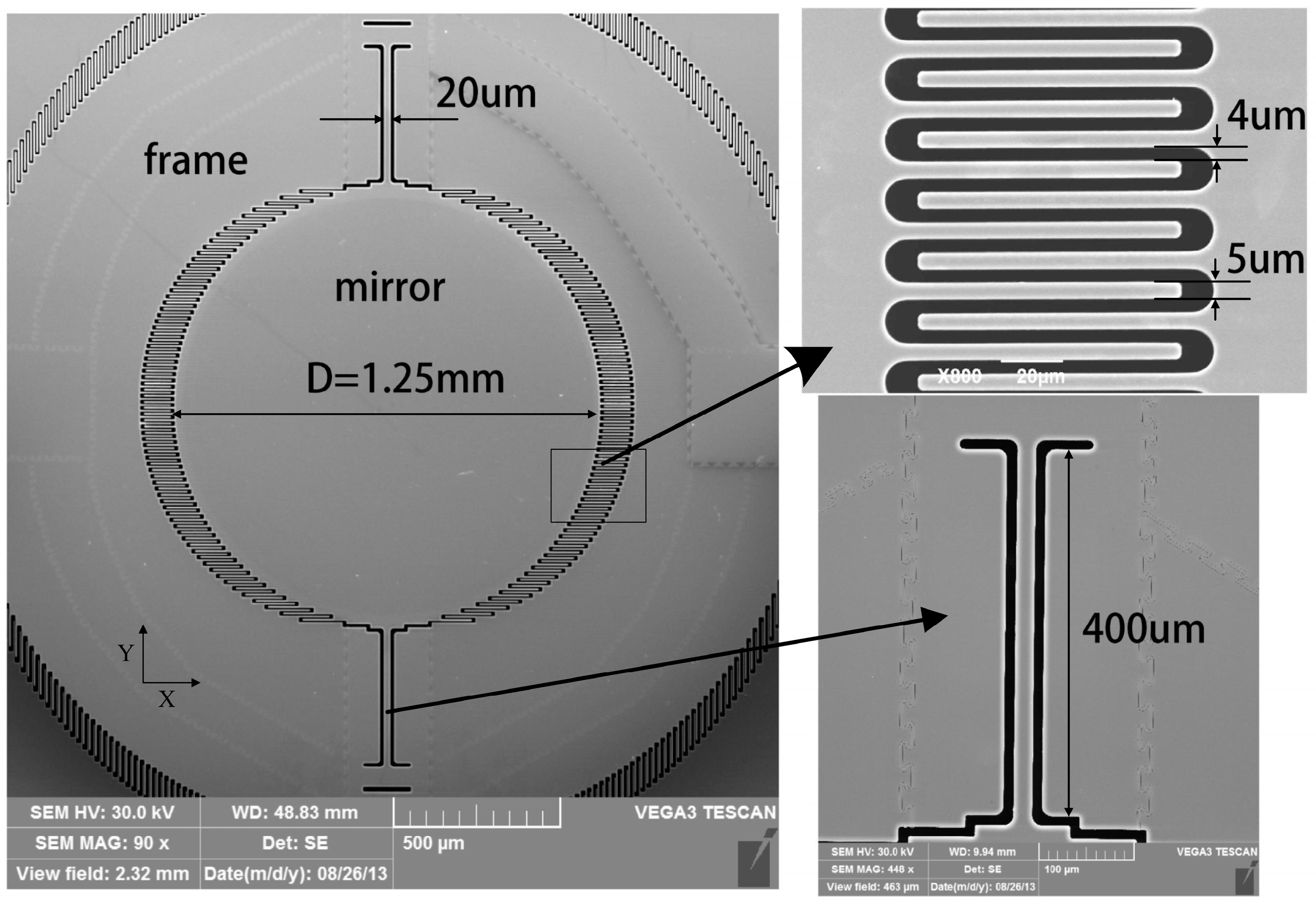
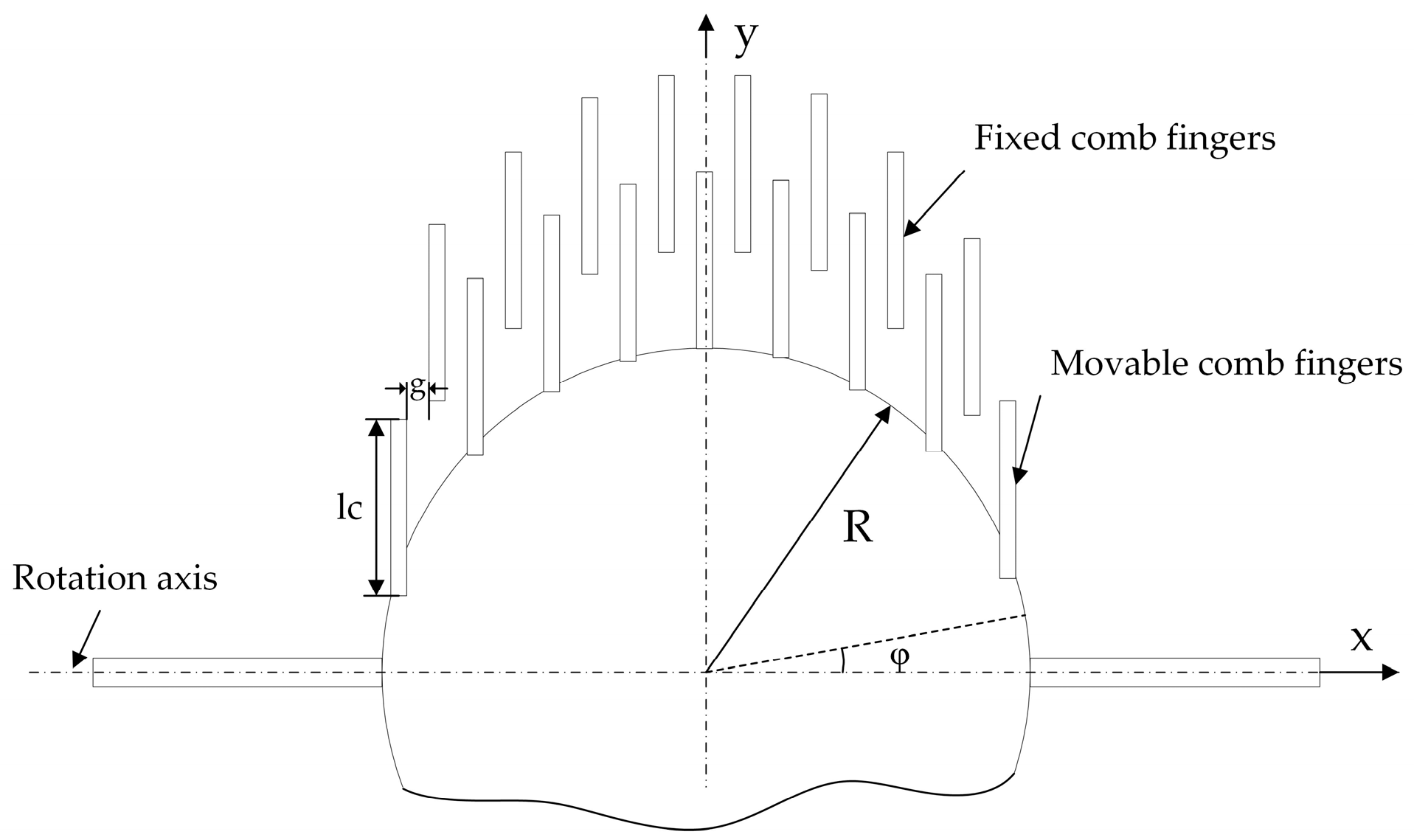
2.1. Device Description
2.2. Principles
2.3. Experimental Procedure
3. Results
3.1. Time Response in a Vacuum
3.2. The Minimum Actuation Voltage in a Vacuum
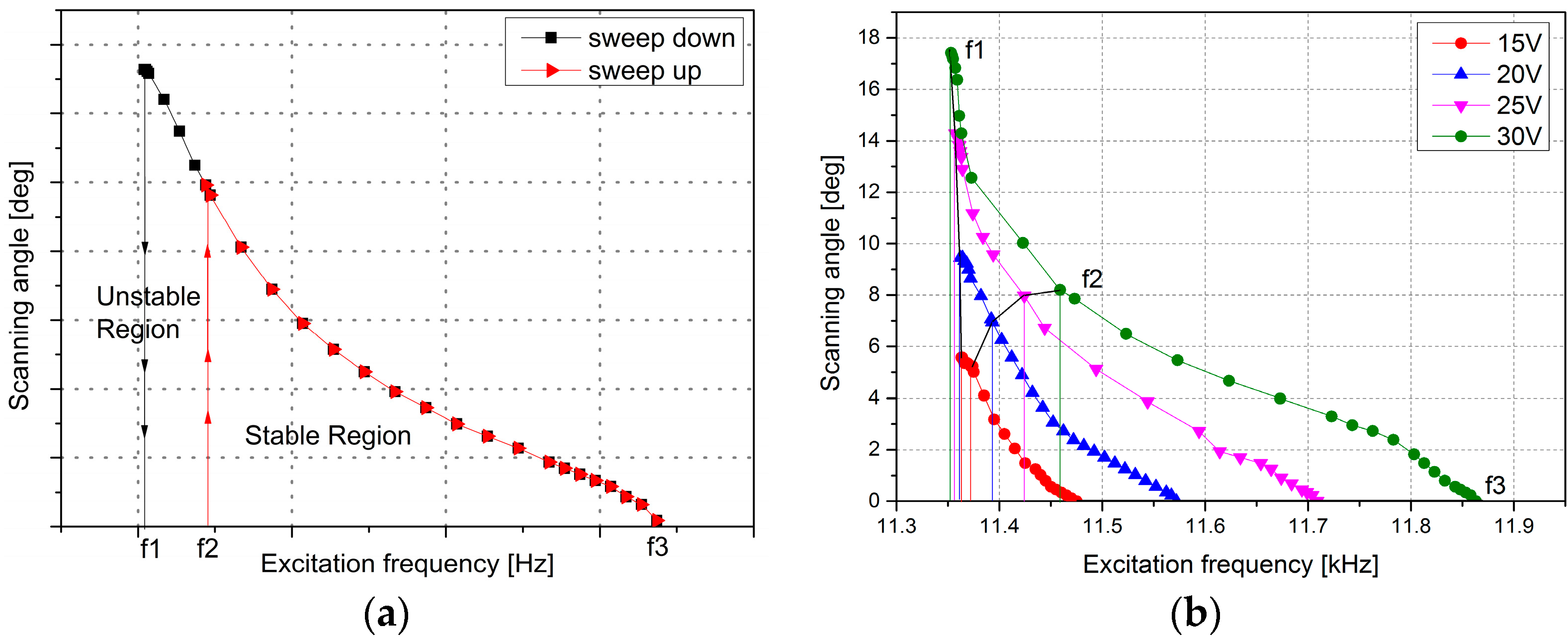
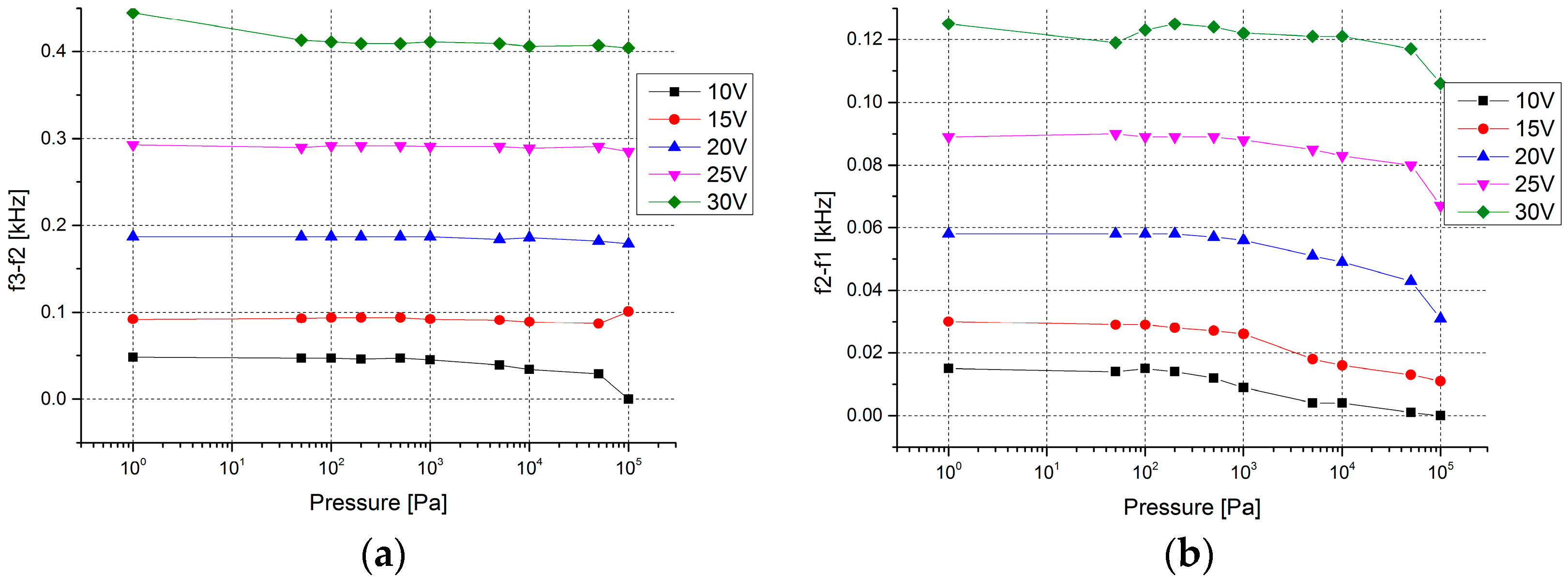
3.3. The Range of Excitation Frequency in Vacuum
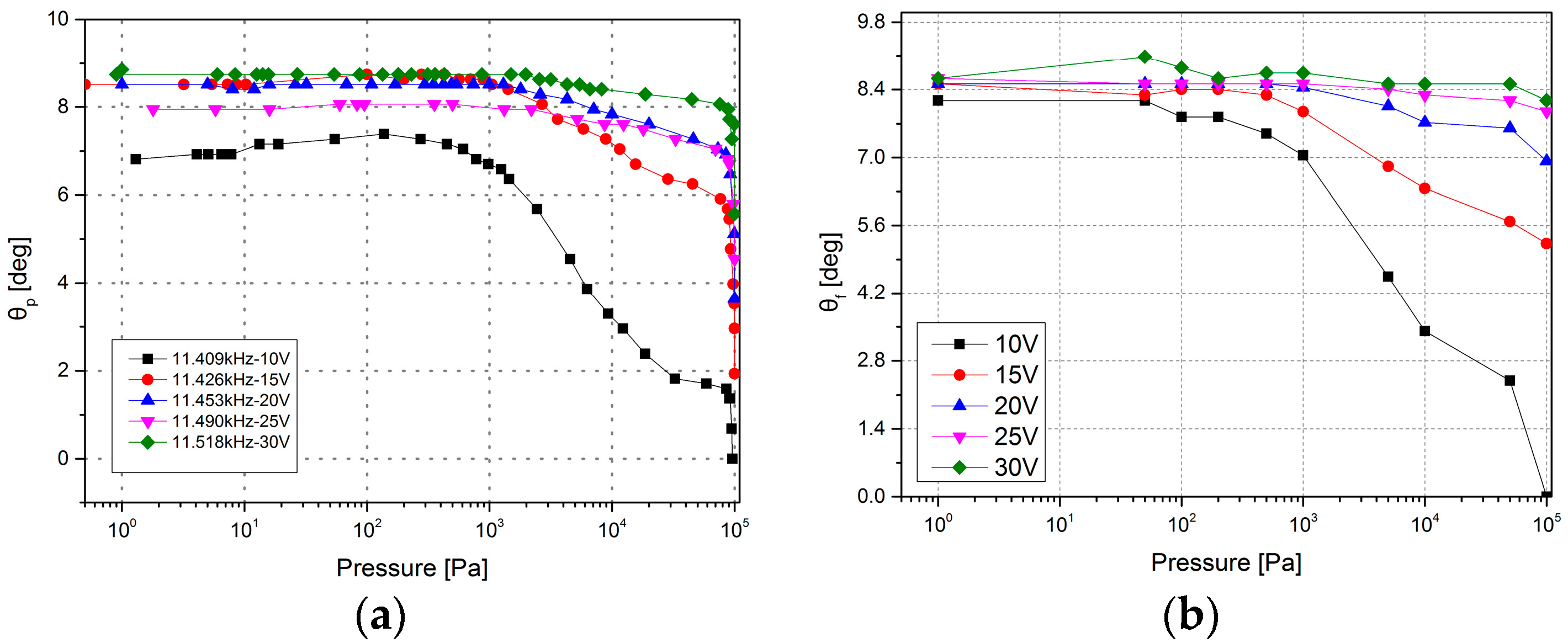
3.4. Characteristics in the Stable Region
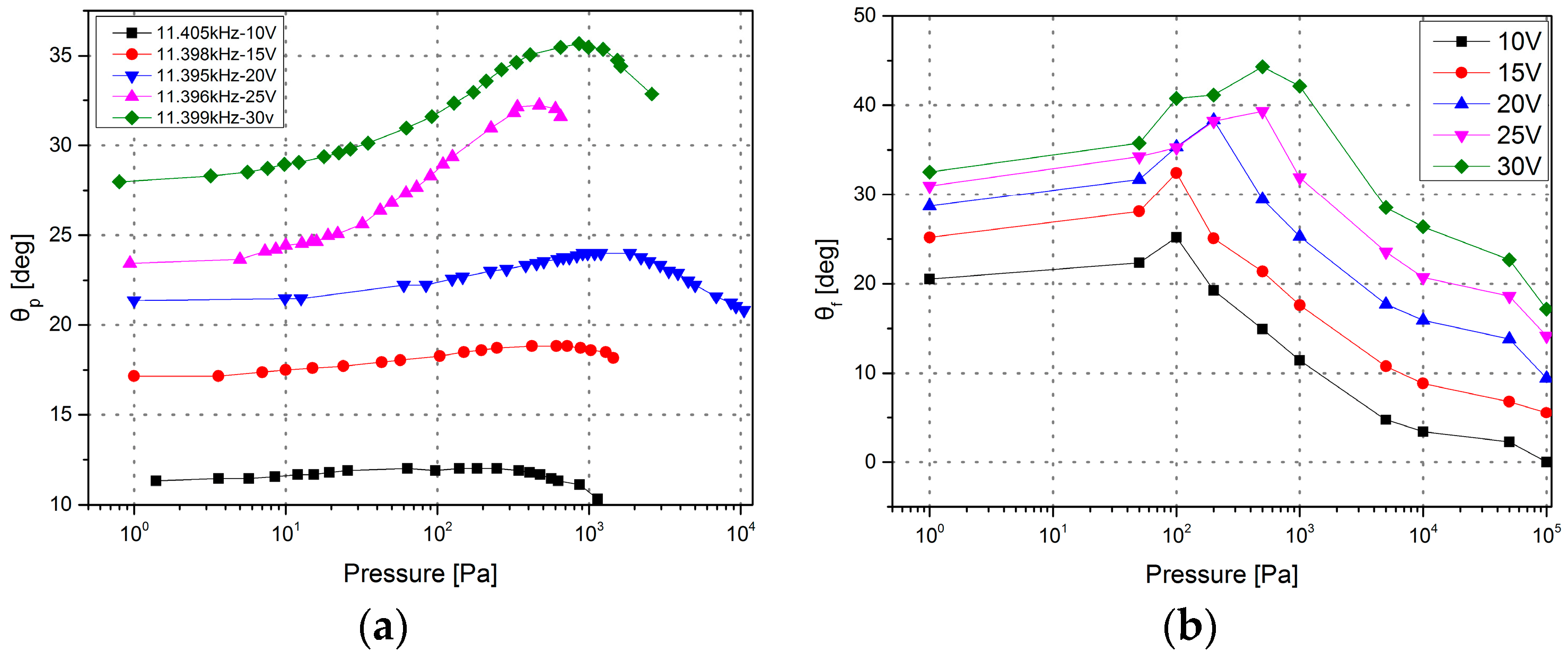
3.5. Characteristics in the Unstable Region
4. Discussion
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Hofmann, U.; Senger, F.; Soerensen, F.; Stenchly, V.; Jensen, B.; Janes, J. Biaxial resonant 7mm-MEMS mirror for automotive LIDAR application. In Proceedings of the 2012 International Conference on Optical MEMS and Nanophotonics (OMN), Banff, AB, Canada, 6–9 August 2012; pp. 150–151. [Google Scholar]
- Kasturi, A.; Milanovic, V.; Atwood, B.H.; Yang, J. UAV-borne lidar with MEMS mirror-based scanning capability. In Proceedings of the Conference on SPIE Defense+ Security, International Society for Optics and Photonics, Baltimore, MD, USA, 17–21 April 2016; Volume 9832. [Google Scholar]
- Hofmann, U.; Senger, F.; Janes, J.; Mallas, C.; Stenchly, V.; von Wantoch, T.; Quenzer, H.J.; Weiss, M. Wafer-level vacuum-packaged two-axis MEMS scanning mirror for pico-projector application. In Proceedings of the SPIE 8977, MOEMS and Miniaturized Systems XIII, San Francisco, CA, USA, 1–6 February 2014. [Google Scholar]
- Wolter, A.; Schenk, H.; Gaumont, E.; Lakner, H. MEMS microscanning mirror for barcode reading: From development to production. In Proceedings of the SPIE 5348, MOEMS Display and Imaging Systems II, San Jose, CA, USA, 24 January 2004; pp. 32–39. [Google Scholar]
- Milanović, V.; Kasturi, A.; Yang, J.; Hu, F. A fast single-pixel laser imager for VR/AR headset tracking. In Proceedings of the SPIE 10116, MOEMS and Miniaturized Systems XVI, San Francisco, CA, USA, 28 January 2017. [Google Scholar]
- Ataman, C.; Urey, H. Modeling and characterization of comb-actuatedresonant microscanners. J. Micromech. Microeng. 2006, 16, 9–16. [Google Scholar] [CrossRef]
- Tenghsien, L.; Chingfu, T. Design, fabrication, and evaluation of vacuum testing of a novel electromagnetic microactuator. J. Micro/Nanolith. MEMS MOEMS 2011, 10, 043001. [Google Scholar]
- Naono, T.; Fujii, T.; Esashi, M.; Tanaka, S. A large-scan-angle piezoelectric MEMS optical scanner actuated by a Nb-doped PZT thin film. J. Micromech. Microeng. 2014, 24, 015010. [Google Scholar] [CrossRef]
- Morrison, J.; Imboden, M.; Little, T.D.C.; Bishop, D.J. Electrothermally actuated tip-tilt-piston micromirror with integrated varifocal capability. Opt. Express 2015, 23, 9555–9566. [Google Scholar] [CrossRef] [PubMed]
- Xia, C.; Qiao, D.; Zeng, Q.; Yuan, W. The squeeze-film air damping of circular and elliptical micro-torsion mirrors. Microfluidics Nanofluidics 2015, 19, 585–593. [Google Scholar] [CrossRef]
- How, K.K.; Lee, C. A two-dimensional MEMS scanning mirror using hybrid actuation mechanisms with low operation voltage. J. Microelectromech. Syst. 2012, 21, 1124–1135. [Google Scholar]
- Hofmann, U.; Oldsen, M.; Quenzer, H.; Janes, J.; Heller, M.; Weiss, M.; Fakas, G.; Ratzmann, L.; Marchetti, E.; D’Ascoli, F.; et al. Wafer-level vacuum packaged resonant micro-scanning mirrors for compact laser projection displays. In Proceedings of the Conference on MOEMS and Miniaturized Systems VII, San Jose, CA, USA, 8 February 2008; p. 688706. [Google Scholar]
- Tachibana, H.; Kawano, K.; Ueda, H.; Noge, H. Vacuum wafer level packaged two-dimensional optical scanner by anodic bonding. In Proceedings of the IEEE 22nd International Conference on Micro Electro Mechanical Systems, Sorrento, Italy, 25–29 January 2009. [Google Scholar]
- Manh, C.H.; Kazuhiro, H. Vacuum operation of comb-drive micro display mirrors. J. Micromech. Microeng. 2009, 19, 105018. [Google Scholar] [CrossRef]
- Chu, H.M.; Kazuhiro, H. Design, fabrication and vacuum operation characteristics of two-dimensional comb-drive micro-scanner. Sens. Actuators A Phys. 2011, 165, 422–430. [Google Scholar] [CrossRef]
- Ishikawa, N.; Kentaro, I.; Renshi, S. Temperature dependence of the scanning performance of an electrostatic microscanner. J. Micromech. Microeng. 2016, 26, 035002. [Google Scholar] [CrossRef]
- Ataman, C.; Urey, H. Nonlinear frequency response of comb-driven microscanners. In Proceedings of the SPIE on MOEMS Display and Imaging Systems II, San Jose, CA, USA, 24 January 2004; Volume 5348, pp. 166–174. [Google Scholar]
- Conant, R.A. Micromachined Mirrors. Ph.D. Dissertation, UC Berkeley, Berkeley, CA, USA, 2002; pp. 9–11. [Google Scholar]
- Martin, M.J.; Houston, B.H.; Baldwin, J.W.; Zalalutdinov, M.K. Damping Models for Microcantilevers, Bridges, and Torsional Resonators in the Free-Molecular-Flow Regime. J. Microelectromech. Syst. 2008, 17, 503–511. [Google Scholar] [CrossRef]
- Klose, T.; Conrad, H.; Sandner, T.; Schenk, H. Fluidmechanical damping analysis of resonant micromirrors with out-of-plane comb drive. In Proceedings of the COMSOL Conference, Hannover, Germany, 4–6 November 2008. [Google Scholar]
- Zhou, H.; Wang, D.; Huang, T. The study of measure model and optical path design of small angle measured by laser triangulation. J. Yunnan Natl. Univ. Nat. Sci. Ed. 2008, 17, 277. [Google Scholar]













© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhao, R.; Qiao, D.; Song, X.; You, Q. The Exploration for an Appropriate Vacuum Level for Performance Enhancement of a Comb-Drive Microscanner. Micromachines 2017, 8, 126. https://doi.org/10.3390/mi8040126
Zhao R, Qiao D, Song X, You Q. The Exploration for an Appropriate Vacuum Level for Performance Enhancement of a Comb-Drive Microscanner. Micromachines. 2017; 8(4):126. https://doi.org/10.3390/mi8040126
Chicago/Turabian StyleZhao, Rong, Dayong Qiao, Xiumin Song, and Qiaoming You. 2017. "The Exploration for an Appropriate Vacuum Level for Performance Enhancement of a Comb-Drive Microscanner" Micromachines 8, no. 4: 126. https://doi.org/10.3390/mi8040126
APA StyleZhao, R., Qiao, D., Song, X., & You, Q. (2017). The Exploration for an Appropriate Vacuum Level for Performance Enhancement of a Comb-Drive Microscanner. Micromachines, 8(4), 126. https://doi.org/10.3390/mi8040126