Design and Analysis of the Elastic-Beam Delaying Mechanism in a Micro-Electro-Mechanical Systems Device

Abstract
:1. Introduction
2. Model and Theoretical Analysis
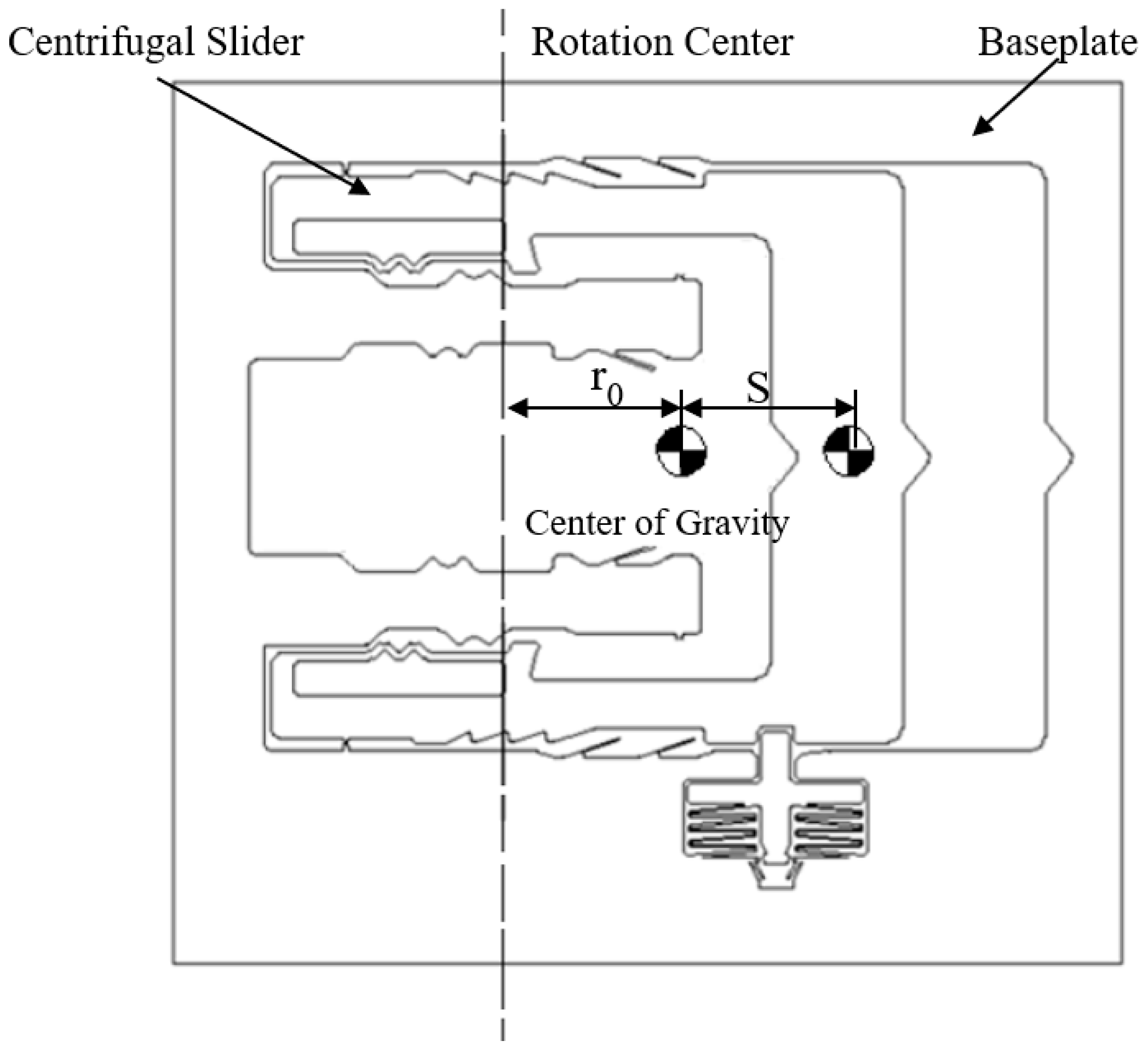
2.1. Model
2.2. Force Analysis
- Neglecting the factors such as friction and air resistance;
- The process of active tooth contact passive tooth movement is from uniform acceleration to uniform deceleration.
2.3. Deflection Calculation
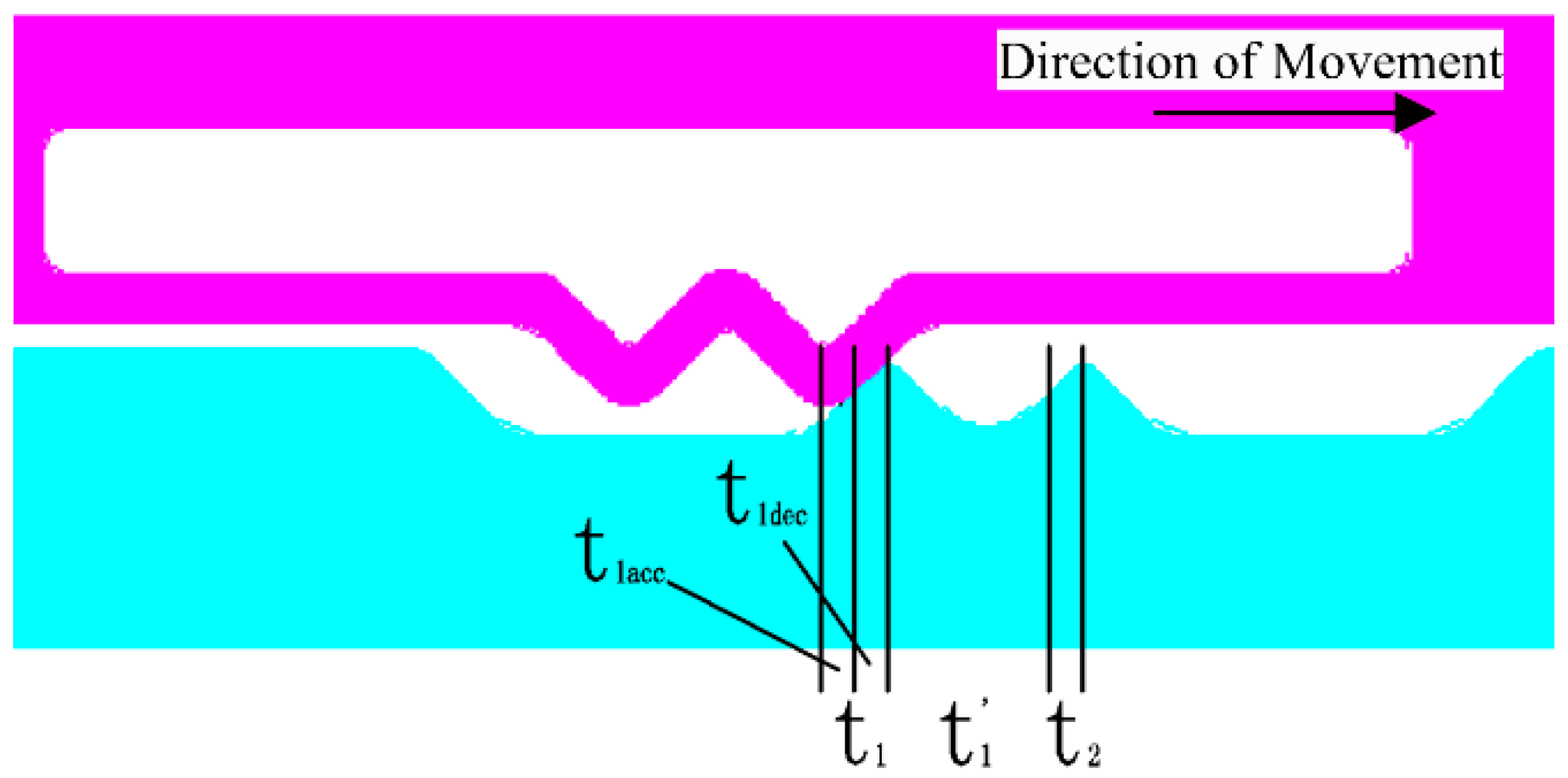
2.4. Kinematic Analysis and Time Estimating
2.4.1. The First Contact of Active Tooth to Passive Tooth
2.4.2. The Second Contact of Active Tooth to Passive Tooth
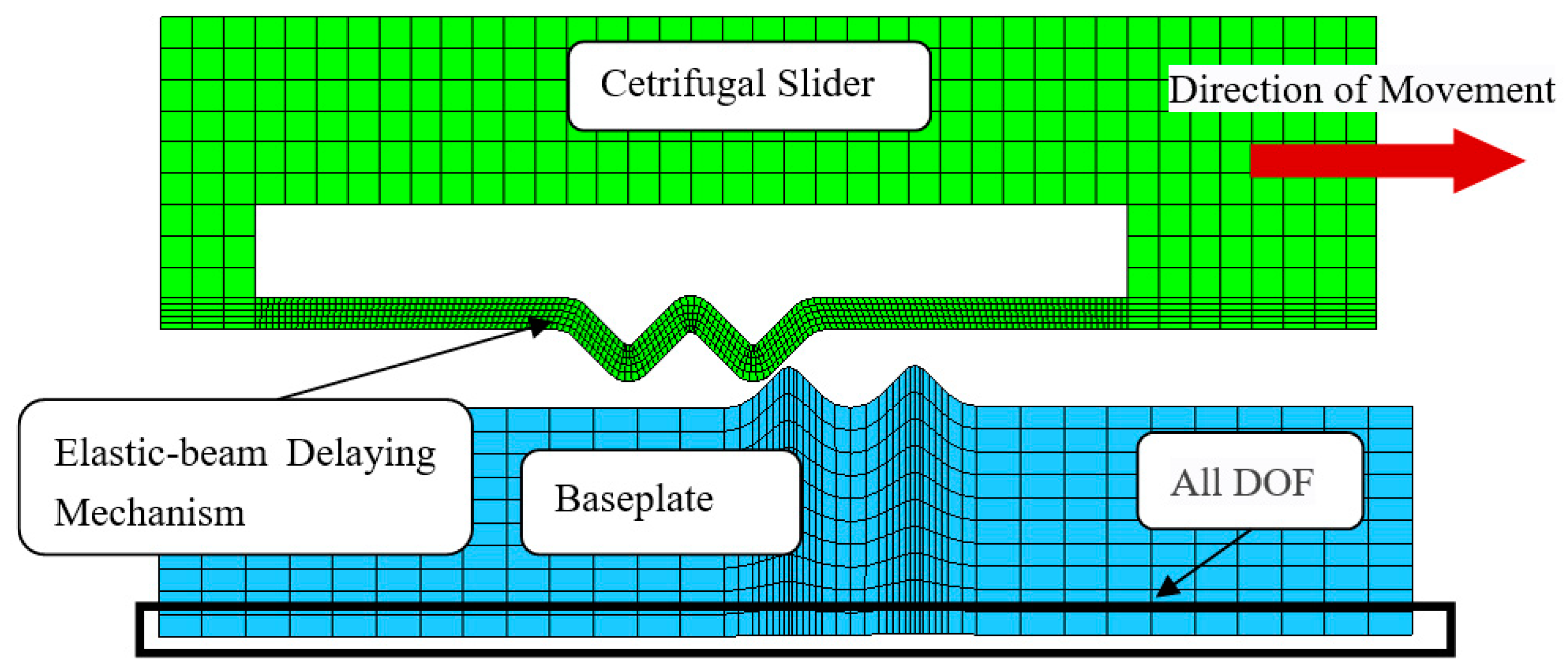
3. Simulation Analysis
- In terms of movement trend, the simulation results are in good agreement with the theoretical calculation;
- In terms of the movement time for the same displacement, simulation results are shorter than the theoretical calculation. Because when active tooth is separated from the first passive tooth, the simulation results have residual velocity, and the theoretical value is 0;
- The gap between active tooth and passive tooth is the most important factor affecting the movement time.
4. Fabrication
5. Test
- The g-value of the delaying mechanism with the same processing batch and the same parameter is relatively discrete, indicating that the material properties of silicon have a certain degree of dispersion.
- The theoretical results are all higher than the simulation results, because the theoretical calculation is completely static, and the possible initial velocity is ignored. And the average value of the test results is higher than the theoretical results, because of the friction and gas resistance in the micro-sample.
- Theoretical results, simulation results and test results have a high degree of agreement, which can be used for initial optimization design.
6. Conclusions
Author Contributions
Acknowledgments
Conflicts of Interest
References
- Ma, B.H. Fuze Structure and Function; National Defense Industry Press: Beijing, China, 1984. [Google Scholar]
- Wang, S.Y. Fuze System Analysis and Engineering Design Questions and Solutions; Nanjing University of Science and Technology: Nanjing, China, 2005. [Google Scholar]
- Shaeffer, D.K. MEMS inertial sensors: A tutorial overview. IEEE Commun. Mag. 2013, 51, 100–109. [Google Scholar] [CrossRef]
- Allameh, S.M. An introduction to mechanical-properties-related issues in MEMS structures. J. Mater. Sci. 2003, 38, 4115–4123. [Google Scholar] [CrossRef]
- Robinson, C.H.; Hoang, T.Q.; Gelak, M.R. Materials, Fabrication and Assembly Technologies for Advanced MEMS-based Safety and Arming Mechanism for Projectile Munitions; J. F. Rasmussen Axsun Technologies, Inc.: Billerica, MA, USA, 2006. [Google Scholar]
- Zhou, X.; Shan, T.; Qi, X. Analysis and design of a high-power laser interrupter for MEMS based safety and arming systems. Microsyst. Technol. 2017, 23, 1–10. [Google Scholar] [CrossRef]
- Wang, D.K.; Lou, W.Z.; Feng, Y.; Zhang, X.Z. Design of High-Reliability Micro Safety and Arming Devices for a Small Caliber Projectile. Micromachines 2017, 8, 234. [Google Scholar] [CrossRef]
- Zhang, R.; Chu, J.K.; Wang, H.Y.; Chen, Z.P. SU-8 chevron electrothermal micro-actuator with three-layer structures. Optics Precis. Eng. 2012, 7, 1500–1508. [Google Scholar] [CrossRef]
- Hélène, P.; Carole, R.; Marjorie, S.; Fabrice, M.; Xavier, D. Integration of a MEMS based safe arm and fire device. Sensors Actuat. A Phys. 2010, 159, 157–167. [Google Scholar]
- Cope, R.D. MEMS S-A Technology; Naval Air Warfare Center, Weapons Division: China Lake, CA, USA, 1999. [Google Scholar]
- Li, X.; Zhao, Y.; Hu, T. Design of a large displacement thermal actuator with a cascaded V-beam amplification for MEMS safety-and-arming devices. Microsyst. Technol. 2015, 21, 2367–2374. [Google Scholar] [CrossRef]
- Zhao, Y.L.; Hu, T.J.; Li, X.Y. Design and characterization of a large displacement electro-thermal actuator for a new kind of safety-and-arming device. Energy Harvest. Syst. 2015, 2, 143–148. [Google Scholar] [CrossRef]
- Yang, J.; Gao, J.Z.; Liu, Y.L.; Jiang, Z.D. Design and Fabrication of MEMS-Based Thermal Micro-Actuator. Micronanoelectron. Technol. 2005, 4, 175–179. [Google Scholar]
- Fogel, O.; Winter, S.; Benjamin, E. 3D printing of functional metallic microstructures and its implementation in electrothermal actuators. Addit. Manuf. 2018, 21, 207–311. [Google Scholar] [CrossRef]
- Kandula, P.; Dong, L. Robust Voltage Control for an Electrostatic Micro-Actuator. J. Dyn. Sys. Meas. Control. 2017, 140, 061012. [Google Scholar] [CrossRef]
- Dong, L.; Kandula, P.; Gao, Z.; Wang, D. Active disturbance rejection control for an electric power assist steering system. Int. J. Intell. Control Syst. 2010, 15, 18–24. [Google Scholar]
- Pezous, H.; Rossi, C.; Sanchez, M. Fabrication, assembly and tests of a MEMS-based safe, arm and fire device. J. Phys. Chem. Solids 2010, 71, 75–79. [Google Scholar] [CrossRef]
- Robinson, C.H.; Wood, R.H. Ultra-Miniature Electro-Mechanical Safety and Arming Device. U.S. Patent 8,276,515, 2 October 2012. [Google Scholar]
- Robert, R. MEMS Based Fuse Technology. In Proceedings of the 58th Annual NDIA Fuse Conference, Baltimore, MD, USA, 7–9 July 2015. [Google Scholar]
- Wang, Y.; Lou, W.Z.; Feng, Y. High impact dynamic simulation of planar S-form micro-spring. Key Eng. Mater. 2013, 562, 1107–1110. [Google Scholar] [CrossRef]
- Tabata, O.; Tsuchiya, T. Reliability of MEMS; Southeast University Press: Nanjing, Jiangsu, China, 2009. [Google Scholar]
- Perrin, M. New Generation Naval Artillery Multi-Function Fuse. In Proceedings of the NDIA’s 56th Annual Fuse Conference, Baltimore, MD, USA, 14–16 May 2012. [Google Scholar]
- Zhou, Z.J.; Nie, W.R.; Wan, X.F. Study on parameters of MEMS planar zigzag slot for fuse. Key Eng. Mater. 2014, 609, 813–818. [Google Scholar]
- Lyle, H.J. Precision Guidance Kit (PGK). In Proceedings of the NDIA 56th Annual Fuse Conference, Baltimore, MD, USA, 14–16 May 2012. [Google Scholar]
- He, G. Micro-Mechanical Safety Mechanism Based on MEMS Technology Theory and Application. Ph.D. Thesis, Beijing Institute of Technology, Beijing, China, 2006. [Google Scholar]
- Li, X.; Zhao, Y.; Hu, T. Design of a high-speed electrothermal linear micromotor for microelectromechanical systems safety-and-arming devices. Micro Nano Lett. 2016, 11, 692–696. [Google Scholar] [CrossRef]
- Liu, J.K.; Qi, X.L.; Jia, J. Study on the reliability problem of MEMS fuse mechanism. Adv. Mater. Res. 2012, 628, 72–77. [Google Scholar] [CrossRef]
- Renaud, L. Pyro-MEMS Technological breakthrough in fuse domain. In Proceedings of the NDIA 55th Annual Fuse Conference, Salt Lake City, UT, USA, 24–26 May 2011. [Google Scholar]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Number | 1 | 2 | 3 | 4 | 5 |
|---|---|---|---|---|---|
| Width of the elastic-beam B/mm | 0.1 | 0.08 | 0.1 | 0.1 | 0.1 |
| Angle of active tooth α/° | 90 | 90 | 70 | 90 | 90 |
| Length of the elastic-beam L/mm | 1.2 | 1.2 | 1.2 | 2.4 | 1.4 |
| Gap between active and tooth and passive tooth E/mm | 0.03 | 0.03 | 0.02 | 0.03 | 0.03 |
| Number of the active tooth | 2 | 1 | |||
| Distance between two adjacent active teeth L′/mm | 0.4 | - | |||
| Distance between two adjacent passive teeth L″/mm | 0.4 | ||||
| Number | 1 | 2 | 3 | 4 | 5 | |
|---|---|---|---|---|---|---|
| Mass of centrifugal slider m/kg | 2.88 × 10−6 | 2.836 × 10−6 | 2.866 × 10−6 | 2.84 × 10−6 | 2.868 × 10−6 | |
| Maximum deflection wmax/mm | 2.86 × 10−2 | 5.50 × 10−2 | 2.0 × 10−2 | 0.20 | 3.23 × 10−2 | |
| Time estimating/μs | t1 | 27.6 | 28.3 | 23.1 | 73.0 | 29.3 |
| t1′ | 49.7 | 48.0 | 50.3 | 36.5 | 49.5 | |
| t2 | 1.9 | 3.8 | 1.3 | 18.3 | 2.2 | |
| ttotal | 79.2 | 80.1 | 74.7 | 129.8 | 81 | |
| Name | Density (kg/m3) | Elasticity Modulus E (GPa) | Poisson’s Ratio |
|---|---|---|---|
| Si | 2.3 × 103 | 180 | 0.3 |
| Number | 1 | 2 | 3 | 4 | 5 | |
|---|---|---|---|---|---|---|
| Maximum deflection wmax/mm | Theoretical | 2.86 × 10−2 | 5.50 × 10−2 | 2.0 × 10−2 | 0.20 | 3.23 × 10−2 |
| Simulation | 2.92 × 10−2 | 5.64 × 10−2 | 2.1 × 10−2 | 0.213 | 3.37 × 10−2 | |
| Error (Simulation-Theoretical)/Theoretical | 2.1% | 2.5% | 5.0% | 6.5% | 4.3% | |
| Number | Test Results/g | Theoretical Results/g | Simulation Results/g | ||||
|---|---|---|---|---|---|---|---|
| Group 1 | Group 2 | Group 3 | Group 4 | Average | |||
| (1) | 35,000 | 33,000 | 35,000 | 36,000 | 34,750 | 31,500 | 30,000 |
| (2) | 19,000 | 15,000 | 21000 | 22,000 | 19,250 | 16,370 | 15,000 |
| (3) | 33,000 | 31,000 | 34,000 | 36,000 | 33,500 | 30,120 | 28,000 |
| (4) | 9000 | 7000 | 10,000 | 9000 | 8750 | 4520 | 4100 |
| (5) | 24,000 | 22,000 | 24,000 | 26,000 | 24,000 | 20,500 | 19,000 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, F.; Zhang, L.; Li, L.; Qiao, Z.; Cao, Q. Design and Analysis of the Elastic-Beam Delaying Mechanism in a Micro-Electro-Mechanical Systems Device. Micromachines 2018, 9, 567. https://doi.org/10.3390/mi9110567
Wang F, Zhang L, Li L, Qiao Z, Cao Q. Design and Analysis of the Elastic-Beam Delaying Mechanism in a Micro-Electro-Mechanical Systems Device. Micromachines. 2018; 9(11):567. https://doi.org/10.3390/mi9110567
Chicago/Turabian StyleWang, Fufu, Lu Zhang, Long Li, Zhihong Qiao, and Qian Cao. 2018. "Design and Analysis of the Elastic-Beam Delaying Mechanism in a Micro-Electro-Mechanical Systems Device" Micromachines 9, no. 11: 567. https://doi.org/10.3390/mi9110567
APA StyleWang, F., Zhang, L., Li, L., Qiao, Z., & Cao, Q. (2018). Design and Analysis of the Elastic-Beam Delaying Mechanism in a Micro-Electro-Mechanical Systems Device. Micromachines, 9(11), 567. https://doi.org/10.3390/mi9110567