Monolithic Multi Degree of Freedom (MDoF) Capacitive MEMS Accelerometers



Abstract
:1. Introduction
- Single chip integration of three proof masses, each sensing a particular axis.
- Monolithic fabrication of two proof masses, one for in-plane sensing (X and Y) and the other for out-of-plane sensing (Z-axis).
- Single proof mass designed to sense all the three directions.
2. Applications of Multi-Axis Accelerometers
3. Accelerometer Operating Principle
4. Specifications of Accelerometers
4.1. Brownian Noise
- an = Brownian equivalent acceleration noise
- = Bandwidth
- = Boltzmann constant
- T = Absolute temperature in Kelvin
4.2. Sensitivity
4.3. Cross-Axis Sensitivity
4.4. Dynamic Range and Nonlinearity
4.5. Frequency Response and the Bandwidth
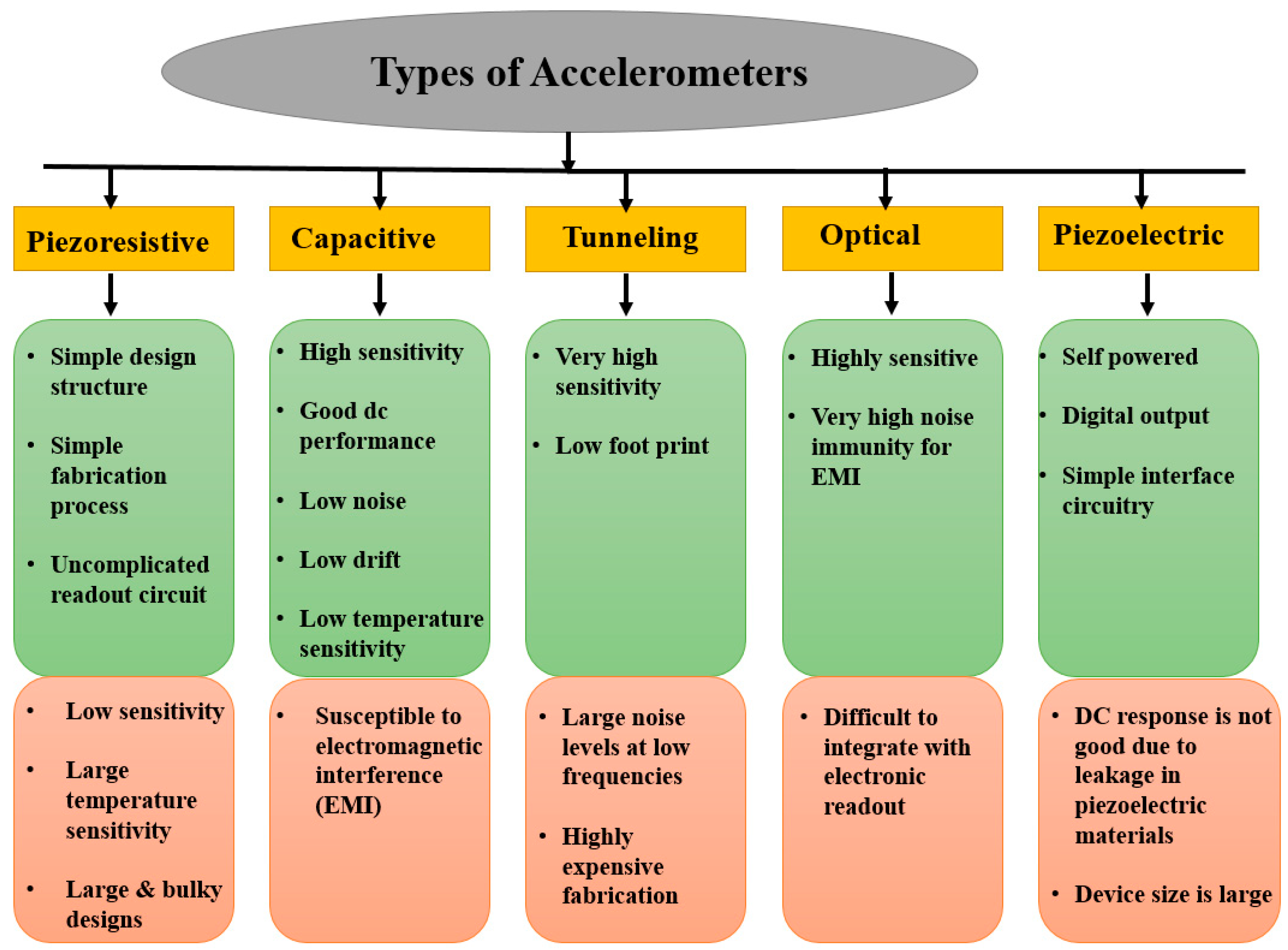
5. Types of Accelerometers
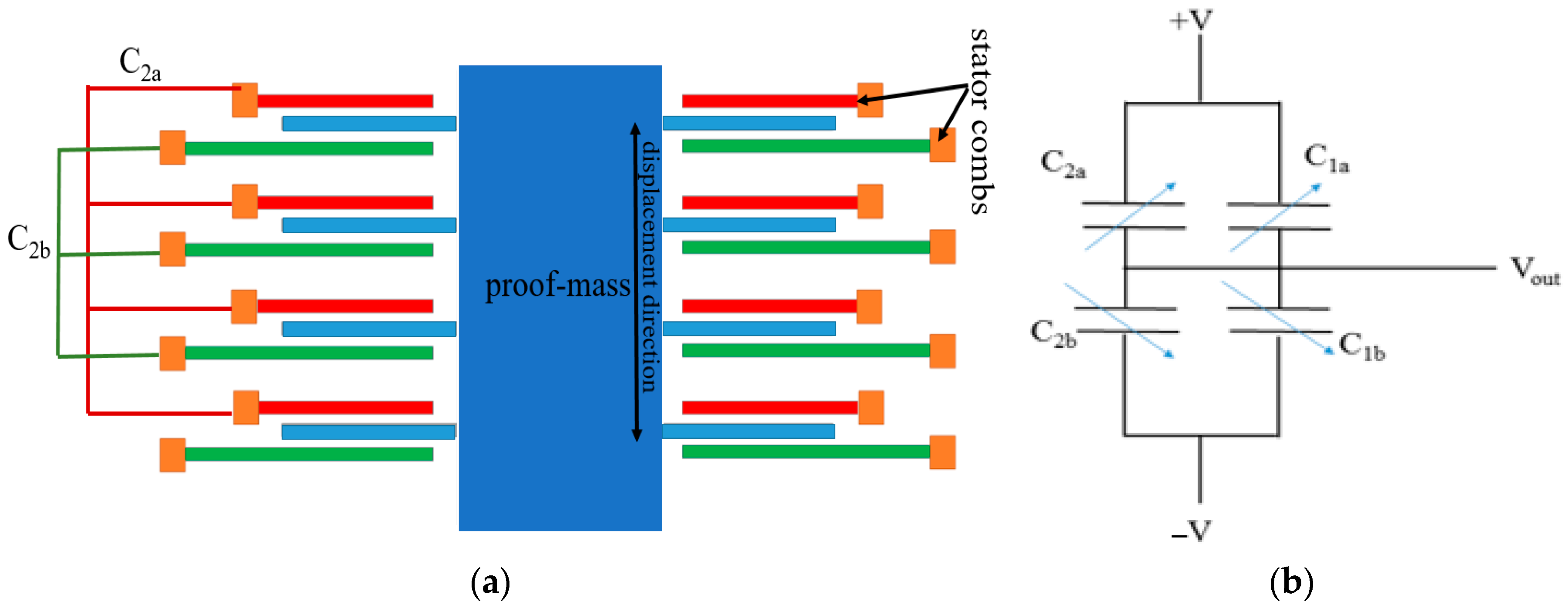
5.1. Capacitive Accelerometers
5.1.1. In-Plane Capacitive Accelerometers
5.1.2. Z-Axis Capacitive Accelerometers
6. Development of Monolithic Multi-Axis Capacitive Accelerometers
6.1. Multiple Proof-Mass Monolithic Integrated Accelerometers
6.2. Single-Proof-Mass 3-Axial Accelerometers
6.3. Comparison of Single-Proof-Mass and Multiple-Proof-Mass Accelerometers
- Gain = 2 or 4 (we will take 2 for our calculation)
- V2PS = 2.25
- = Capacitive Sensitivity in fF/g
- = 1.5 pF
- = 0.5 or 2.25 (this is an offset that we will ignore in our comparisons)
7. Conclusions
Funding
Conflicts of Interest
References
- Volant Technologies Web Site―Accelerometer and Pressure Sensor MEMS History. Available online: http://terahz.org/_html/22SensorChronology.html (accessed on 1 August 2018).
- Luczak, S.; Oleksiuk, W.; Bodnicki, M. Sensing tilt with MEMS accelerometers. IEEE Sens. J. 2006, 6, 1669–1675. [Google Scholar] [CrossRef]
- Perez, R.; Costa, Ú.; Torrent, M.; Solana, J.; Opisso, E.; Caceres, C.; Tormos, J.M.; Medina, J.; Gómez, E.J. Upper Limb Portable Motion Analysis System Based on Inertial Technology for Neurorehabilitation Purposes. Sensors 2010, 10, 10733–10751. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Qu, H. CMOS MEMS Fabrication Technologies and Devices. Micromachines 2016, 7, 14. [Google Scholar] [CrossRef] [PubMed]
- Ayazi, F. Multi-DOF Inertial MEMS: From Gaming to Dead Reckoning. In Proceedings of the 16th International Solid-State Sensors, Actuators and Microsystems Conference (Transducers), Beijing, China, 5–9 June 2011. [Google Scholar]
- Honeywell. ASA7000, Micromachined Accelerometer, Data Sheet; Honeywell: Morris Plains, NJ, USA, 2001. [Google Scholar]
- I. O. Inc. Si-FlexTM SF3000L Low-Noise Tri-Axial Accelerometer; I. O. Inc.: Palm Bay, FL, USA, 2004. [Google Scholar]
- Lemkin, M.; Boser, B.E. A three-axis micromachined accelerometer with a CMOS position-sense interface and digital offset-trim electronics. IEEE J. Solid-State Circuits 1999, 34, 456–468. [Google Scholar] [CrossRef]
- Lemkin, M.A.; Ortiz, M.A.; Wongkomet, N.; Boser, B.E.; Smith, J.H. A 3-Axis Surface Micromachined ΣΔ Accelerometer. In Proceedings of the 1997 IEEE International Solids-State Circuits Conference, San Francisco, CA, USA, 8 February 1997. [Google Scholar]
- Lemkin, M.A.; Boser, B.E.; Auslander, D.; Smith, J.H. A 3-axis force balanced accelerometer using a single proof-mass. In Proceedings of the International Conference on Solid State Sensors and Actuators Conference, Chicago, IL, USA, 19 June 1997. [Google Scholar]
- “One-Third of Mobile Phones to Use Accelerometers by 2010, Spurred by iPhone and Palm Pre,” News, iSupply Corp., El Segundo, CA, USA. Available online: http://www.isuppli.com/News/Pages/One-Third-of-Mobile-Phones to-Use-Accelerometers-by-2010-Spurred-by-iPhone-and-Palm-Pre.aspx (accessed on 20 June 2010).
- “Nexus One the Google Phone Is Coming,” Article, Examiner.com, Denver, CO, USA. Available online: http://www.examiner.com/x-33316-Boulder-Technology-Examiner y2009m12d15-Nexus-OneThe-Google-Phone-is-coming (accessed on 20 June 2010).
- “Nokia beats Apple to Compass-in-Phone,” Article, MEMS Industry Group, Pittsburgh, PA, USA. Available online: http://memsblog.wordpress.com/2009/12/03/nokia-beats-apple-to-compassin-phone/ (accessed on 20 June 2010).
- “Analog Devices and Nintendo Collaboration Drives Video Game Innovation with iMEMS Motion Signal Processing Technology,” Press Release, Analog Devices, Inc., Nordwood, MA, USA. Available online: http://www.analog.com/en/pressrelease/May 09 2006 ADI Nintendo Collaboration/press.html (accessed on 20 June 2010).
- Yazdi, N.; Ayazi, F.; Najafi, K. Micromachined Inertial Sensors. Proc. IEEE 1998, 86, 1640–1659. [Google Scholar] [CrossRef]
- Yazıcıoğlu, R.F. Surface Micromachined Capacitive Accelerometers Using MEMS Technology. Master’s Thesis, Middle East Technical University, Ankara, Turkey, 2003. [Google Scholar]
- Seshia, A.A.; Palaniapan, M.; Roessing, T.A.; Howe, R.T.; Gooch, R.W.; Schimert, T.R.; Montague, S. A Vacuum Packaged Surface Micromachined Resonant Accelerometer. J. Microelectromech. Syst. 2002, 11, 784–793. [Google Scholar] [CrossRef]
- Baldwin, C.; Niemczuk, J.; Kiddy, J.; Slater, T. Review of fiber optic accelerometers. In Proceedings of the IMAC XXIII Conference & Exposition on Structural Dynamics, Society for Experimental Mechanics, Orlando, FL, USA, 31 January–3 February 2005. [Google Scholar]
- Milanovi, V.; Bowen, E.; Tea, N.; Suehle, J.; Payne, B.; Zaghloul, M.; Gaitan, M. Convection based Accelerometer and Tilt Sensor Implemented in Standard CMOS. In Proceedings of the International Mechanical Engineering Congress and Exposition, San Francisco, CA, USA, 15–20 November 1998. [Google Scholar]
- Lui, C.H.; Kenny, T.H. A High-Precision Wide-Bandwidth Micromachined Tunneling Accelerometer. J. Microelectromech. Syst. 2001, 10, 425–433. [Google Scholar]
- Xie, H.; Fedder, G.K. A CMOS Z-Axis Capacitive Accelerometer with Comb-Finger Sensing. In Proceedings of the IEEE Micro Electro Mechanical Systems Conference, Miyazaki, Japan, 23–27 January 2000. [Google Scholar]
- Jiang, X.; Wang, F.; Kraft, M.; Boser, B.E. An Integrated Surface Micromachined Capacitive Lateral Accelerometer with 2 μG/rt-Hz Resolution. In Proceedings of the Solid State Sensor and Actuator Workshop, Hilton Head Island, SC, USA, 2–6 June 2002. [Google Scholar]
- Puers, R.; Reyntjens, S. Design and Processing Experiments of a new Miniaturized Capacitive Triaxial Accelerometers. Sens. Actuators A 1998, 68, 324–328. [Google Scholar] [CrossRef]
- Qu, W.; Wenzel, C.; Jahn, A. One-mask Procedure for the Fabrication of Movable High-Aspect-Ratio 3d Microstructures. J. Microelectromech. Syst. 1998, 8, 279–283. [Google Scholar] [CrossRef]
- Robin, L.; Mounier, E. Inertial sensor market moves to combo sensors and sensor hubs. MEMS’ Trends Mag. 2013, 16, 16–18. [Google Scholar]
- Ocak, I.E.; Cheam, D.D.; Fernando, S.N.; Lin, A.T.; Singh, P.; Sharma, J.; Kwong, D.L. A Monolithic 9 Degree of Freedom (DOF) Capacitive Inertial MEMS Platform. In Proceedings of the IEEE International Electron Devices Meeting, San Francisco, CA, USA, 15–17 December 2014. [Google Scholar]
- Weigold, J.W.; Najafi, K.; Pang, S.W. Design and Fabrication of Submicrometer, Single Crystal Si Accelerometer. J. Microelectromech. Syst. 2001, 10, 518–524. [Google Scholar] [CrossRef]
- Chau, K.H.L.; Lewis, S.R.; Zhao, Y.; Howe, R.T.; Bart, S.F.; Marcheselli, R.G. An integrated force-balanced capacitive accelerometer for low-g applications. Sens. Actuators A 1996, 54, 472–476. [Google Scholar] [CrossRef]
- Chae, J.; Kulah, H.; Najafi, K. A hybrid Silicon-On-Glass (SOG) lateral micro-accelerometer with CMOS readout circuitry. In Proceedings of the IEEE International Conference on MEMS, Las Vegas, NV, USA, 24 January 2002. [Google Scholar]
- Benmessaoud, M.; Nasreddine, M.M. Optimization of MEMS capacitive accelerometer. Microsyst. Technol. 2013, 19, 713–720. [Google Scholar] [CrossRef] [Green Version]
- Aydin, O.; Akin, T. A bulk-micromachined fully-differential MEMS accelerometer with interdigitated fingers. In Proceedings of the IEEE Sensors Conference, Taipei, Taiwan, 28–32 October 2012. [Google Scholar]
- Mohammed, Z.; Gill, W.A.; Rasras, M. Double-Comb-Finger Design to Eliminate Cross-Axis Sensitivity in a Dual-Axis Accelerometer. IEEE Sens. Lett. 2017, 1, 1–4. [Google Scholar] [CrossRef]
- Mohammed, Z.; Dushaq, G.; Chatterjee, A.; Rasras, M. Bi-axial highly sensitive ±5g polysilicon based differential capacitive accelerometer. In Proceedings of the 17th International Conference on Thermal, Mechanical and Multi-Physics Simulation and Experiments in Microelectronics and Microsystems (EuroSimE), Montpellier, France, 18–20 April 2016. [Google Scholar]
- Seidel, H.; Riedel, H.; Kolbeck, R.; Mück, G.; Kupke, W.; Königer, M. Capacitive silicon accelerometer with highly symmetrical design. Sens. Actuators A Phys. 1990, 21, 312–315. [Google Scholar] [CrossRef]
- Matsumoto, Y.; Iwakiri, M.; Tanaka, H.; Ishida, M.; Nakamura, T. A capacitive accelerometer using SDB-SOI structure. Sens. Actuators A 1996, 53, 267–272. [Google Scholar] [CrossRef]
- Chen, W.; Huo, M.; Lin, Y.; Liu, X.; Zhang, R. A novel Zaxis capacitive accelerometer using SOG structure. In Proceedings of the 6th International Conference on Electronics Packaging Technology, Shenzhen, China, 30 August–2 September 2005. [Google Scholar]
- Lee, I.; Yoon, G.H.; Park, J.; Seok, S.; Chun, K.; Lee, K. Development and analysis of the vertical capacitive accelerometer. Sens. Actuators A 1996, 119, 8–18. [Google Scholar] [CrossRef]
- Mohammed, Z.; Elfadel, I.M.; Rasras, M. High dynamic range Z-axis hybrid spring MEMS capacitive accelerometer. In Proceedings of the IEEE Symposium on Design, Test, Integration & Packaging of MEMS and MOEMS (DTIP), Rome, Italy, 22–25 May 2018. [Google Scholar]
- Matsumoto, Y.; Nishimura, M.; Matsuura, M.; Ishida, M. Three-axis SOI capacitive accelerometer with PLL C–V converter. Sens. Actuators A Phys. 1999, 75, 77–85. [Google Scholar] [CrossRef]
- Matsumoto, Y.; Yoshida, K.; Ishida, M. Fluorocarbon film for protection from alkaline etchant and elimination of in-use stiction. In Proceedings of the International Solid State Sensors and Actuators, Chicago, IL, USA, 19 June 1997. [Google Scholar]
- Butefisch, S.; Schoft, A.; Buttgenbach, S. Three-axes monolithic silicon low-g accelerometer. J. Microelectromech. Syst. 2000, 9, 551–556. [Google Scholar] [CrossRef]
- Rodjeg, H.; Andersson, G. Design optimization of three-axis accelerometers based on four seismic masses. In Proceedings of the IEEE Sensors, Orlando, FL, USA, 12–14 June 2002. [Google Scholar]
- Rödjegård, H.; Johansson, C.; Enoksson, P.; Andersson, G. A monolithic three-axis SOI-accelerometer with uniform sensitivity. Sens. Actuators A Phys. 2005, 123–124, 50–53. [Google Scholar] [CrossRef]
- Chae, J.; Kulah, H.; Najafi, K. A Monolithic Three-Axis Micro-g Micromachined Silicon Capacitive Accelerometer. J. Microelectromech. Syst. 2005, 14, 235–242. [Google Scholar] [CrossRef]
- Chae, J.; Kulah, H.; Najafi, K. An In-Plane High-Sensitivity, Low-Noise Micro-g Silicon Accelerometer with CMOS Readout Circuitry. J. Microelectromech. Syst. 2004, 13, 628–635. [Google Scholar] [CrossRef]
- Yazdi, N.; Ayazi, F.; Najafi, K. An All-Silicon Single-Wafer Micro-g Accelerometer with a Combined Surface and Bulk Micromachining Process. J. Microelectromech. Syst. 2000, 9, 1–8. [Google Scholar] [CrossRef]
- Liu, Y.C.; Tsai, M.H.; Li, S.S.; Fang, W. A Fully-Differential, Multiplex-Sensing Interface Circuit Monolithically Integrated with Tri-Axis Pure Oxide Capacitive CMOS-MEMS Accelerometers. In Proceedings of the 17th International Conference on Solid-State Sensors, Actuators and Microsystems, Barcelona, Spain, 16–20 June 2013. [Google Scholar]
- Tez, S.; Akin, T. Fabrication of a sandwich type three axis capacitive MEMS accelerometer. In Proceedings of the IEEE Sensors, Baltomire, MD, USA, 3–6 November 2013. [Google Scholar]
- Tez, S.; Aykutlu, U.; Torunbalci, M.M.; Akin, T. A Bulk-Micromachined Three-Axis Capacitive MEMS Accelerometer on a Single Die. J. Microelectromech. Syst. 2015, 24, 1264–1274. [Google Scholar] [CrossRef]
- Aydemir, A.; Terzioglu, Y.; Torunbalci, M.M.; Akin, T. A new design and a fabrication approach to realize a high performance three axes capacitive MEMS accelerometer. Sens. Actuators A Phys. 2016, 244, 324–333. [Google Scholar] [CrossRef]
- Mineta, T.; Kobayashi, S.; Watanabe, Y.; Kanauchi, S.; Nakagawa, I.; Suganuma, E.; Esashi, M. Three-axis capacitive accelerometer with uniform axial sensitivities. J. Micromech. Microeng. 1996, 6, 431–435. [Google Scholar] [CrossRef]
- Li, G.; Li, Z.; Wang, C.; Hao, Y.; Li, T.; Zhang, D.; Wu, G. Design and fabrication of a highly symmetrical capacitive triaxial accelerometer. J. Micromech. Microeng. 2001, 11, 48–54. [Google Scholar] [CrossRef]
- Xie, H.; Pan, Z.; Frey, W.; Fedder, G. Design and fabrication of an integrated CMOS-MEMS 3-axis accelerometer. In Proceedings of the 2003 Nanotechnology Conference, San Francisco, CA, USA, 23–27 February 2003. [Google Scholar]
- Mohammed, Z.; Dushaq, G.; Chatterjee, A.; Rasras, M. An optimization technique for performance improvement of gap-changeable MEMS accelerometers. Mechatronics 2018, 54, 203–216. [Google Scholar] [CrossRef]
- Qu, H.; Fang, D.; Xie, H. A Single-Crystal Silicon 3-axis CMOS-MEMS Accelerometer. In Proceedings of the IEEE Sensors Conference, Vienna, Austria, 24–27 October 2004. [Google Scholar]
- Qu, H.; Fang, D.; Xie, H. A Monolithic CMOS-MEMS 3-Axis Accelerometer with a Low-Noise, Low-Power Dual-Chopper Amplifier. IEEE Sens. J. 2008, 8, 1511–1518. [Google Scholar]
- Hollocher, D.; Zhang, X.; Sparks, A.; Bart, S.; Sawyer, W.; Narayanasamy, P.; Mhatre, R. A Very Low Cost, 3-axis, MEMS Accelerometer for Consumer Applications. In Proceedings of the IEEE Sensors, Christchurch, New Zealand, 25–28 October 2009. [Google Scholar]
- Sun, C.M.; Tsai, M.H.; Liu, Y.C.; Fang, W. Implementation of a monolithic single proof-mass tri-axis accelerometer using CMOS-MEMS technique. IEEE Trans. Electron. Dev. 2010, 57, 1670–1679. [Google Scholar] [CrossRef]
- Hsu, Y.W.; Chen, J.Y.; Chien, H.T.; Chen, S.; Lin, S.T.; Liao, L.P. New capacitive low-g triaxial accelerometer with low cross-axis sensitivity. J. Micromech. Microeng. 2010, 20, 055019. [Google Scholar] [CrossRef]
- Tsai, M.H.; Liu, Y.C.; Fang, W. A Three-Axis CMOS-MEMS Accelerometer Structure with Vertically Integrated Fully Differential Sensing Electrodes. J. Microelectromech. Syst. 2012, 21, 1329–1337. [Google Scholar] [CrossRef]
- Lo, S.C.; Chan, C.K.; Lai, W.C.; Wu, M.; Lin, Y.C.; Fang, W. Design and Implementation of A Novel Poly-Si Single Proof-Mass Differential Capacitive-Sensing 3-Axis Accelerometer. In Proceedings of the 17th International Conference on Solid-State Sensors, Actuators and Microsystems, Barcelona, Spain, 16–20 June 2013. [Google Scholar]
- Serrano, D.E.; Jeong, Y.; Keesara, V.; Sung, W.K.; Ayazi, F. Single Proof-Mass Tri-Axial Pendulum Accelerometers Operating in Vacuum. In Proceedings of the IEEE 27th International Conference on Micro Electro Mechanical Systems (MEMS), San Francisco, CA, USA, 26–30 January 2014. [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Ref | Year | Author | Device Size (mm × mm) | Range (‘±g’) | Sensitivity X, Y, and Z | Nonlinearity X, Y, and Z | Cross-Axis Sensitivity X, Y, and Z | |
|---|---|---|---|---|---|---|---|---|
| [8] | 1999 | Lemkin, M. | 4 × 4 (including read out) | 1.9 | Digital Output (0.4 fF/bit) | 110, 160, 990 | - | - |
| [39] | 1999 | Matsumoto, Y. | 5 × 5 | - | 25 fF/g, 25 fF/g, 100 fF/g | <10% | ||
| [41] | 2000 | Butefisch, S. | 9 × 9 | - | 210 mV/g | - | R2 = 0.997 | - |
| 990 mV/g | R2 = 0.99 | |||||||
| [43] | 2005 | Rodjegard, H. | 2.5 × 2 | - | 1.27 fF/g, 1.27 fF/g, 0.82 fF/g | - | - | 0.12 fF/g |
| [44] | 2005 | Chae, J. | 7 × 9 | 1 | 6.8 pF/g, 6.8 pF/g, 2.9 pF/g | 1.6, 1.6, 1.08 | - | - |
| [47] | 2013 | Liu, Y.C. | 1.57 × 1.73 | 0.01~2 | 105 mV/g, 127 mV/g, 58 mV/g | 400, 210, 940 | 1%, 0.5%, 2.4% | 3%, 2.3%, 8.8% |
| [49] | 2015 | Tez, S. | 12 × 7 | 10 (X, Y) +12, −7 (Z) | - | 5.4, 5.5, 12.6 | 0.34%, 0.28%, 0.41% | <1% |
| [50] | 2016 | Aydemir, A. | 11.8 × 4.8 | 4 | 70.2 mV/g, 70.4 mV/g, 21.6 mV/g | 13.9, 13.2, 17.8 | 0.26%, 0.28%, 0.3% | <1% |
| 71 (X, Y) 231 (Z) estimated |
| Ref | Year | Author | Device Size (mm × mm) | Range (‘±g’) | Sensitivity X, Y, and Z | Nonlinearity X, Y, and Z | Cross-Axis Sensitivity X, Y, and Z | |
|---|---|---|---|---|---|---|---|---|
| [51] | 1996 | Mineta, T. | 10 × 10 | - | - | - | - | 10% |
| [10] | 1997 | Lemkin, M.A. | 4 × 4 (including read out) | 11-X-axis, 11-Y-axis, 5.5-Z-axis | 0.24 fF/g, 0.24 fF/g, 0.82 fF/g | 730, 730, 760 | - | 1.58% (calculated) |
| [52] | 2001 | Li, G. | 1.8 × 1.8 (only proof mass) | - | 30 mV/g, 30 mV/g, 37 mV/g | - | - | <5% |
| [53] | 2003 | Xie, H. | 1 × 1 (including readout) | - | - | 50 (estimated) | - | - |
| [56] | 2008 | Qu, H. | 4 × 4 (including readout) | 1 | 520 mV/g, 460 mV/g, 320 mV/g | 12, 14, 110 | - | 2.38%, 2.26%, 4.73% Maximum values |
| [57] | 2009 | Hollocher, D. | 4 × 4 (including read out) | 3 | 300 mV/g | 150, 150, 300 | 0.3% | 1% |
| [58] | 2010 | Sun, C.M. | 1.78 × 1.78 (including read out) | 0.8~6 | 0.53 mV/g, 0.28 mV/g, 0.2 mV/g | 120,000, 271,000, 357,000 | 2.64%, 3.15%, 3.36% | <7.46%, <8.05%, <8.33% Max values |
| [59] | 2010 | Hsu, Y.W. | 1.3 × 1.28 | 1 | 1.44 mV/g, 1.24 mV/g, 1.4 mV/g | 138, 159, 49 | 0.52%, 0.56%, 0.24% | 0.28%, 0.7%, 0.54% Max values |
| [60] | 2012 | Tsai, M.H. | 0.4 × 0.4 (only proof mass) | 0~1 | 14.7 mV/g, 15.4 mV/g, 14.6 mV/g | 2100, 2000, 2100 | 3.2%, 1.4%, 2.8% | 6.6%, 5.4%, 5.3% Maximum values |
| [61] | 2013 | Lo, S.C. | 1.7 × 1.7 (only proof mass) | 0.1~3 | 4.31 mV/g, 4.3 mV/g, 3.48 mV/g | - | 2.72%, 2.57%, 2.91% | 6.8%, 6.8%, 9.0% |
| [62] | 2014 | Serrano, D.E. | 0.45 × 0.45 (only proof mass) | 6 | 6 mV/g, 5 mV/g, 11 mV/g | 13, 13, 30 | 0.5%, 0.5%, 1% | 3% (maximum) |
| Multiple Proof-Mass Accelerometers | Single Proof-Mass Accelerometers | ||||||
|---|---|---|---|---|---|---|---|
| Ref | Year | Sensitivity/Area (mV/mm2) | Ref | Year | Sensitivity/Area (mV/mm2) | ||
| [8] | 1999 | - | 15,840 | [10] | 1997 | 0.0513 | 12,160 |
| [39] | 1999 | 3.42 | - | [52] | 2001 | 9.259 | - |
| [41] | 2000 | 2.59 | - | [53] | 2003 | - | 50 |
| [43] | 2005 | 0.56 | - | [56] | 2008 | 20 | 1760 |
| [44] | 2005 | 157 | 100 | [57] | 2009 | 18 | 4800 |
| [47] | 2013 | 21.35 | 2553 | [58] | 2010 | 0.06 | 1,131,118 |
| [49] | 2015 | - | 1058 | [59] | 2010 | 0.745 | 264 |
| [50] | 2016 | 0.381 | 1008 | [60] | 2012 | 91.25 | 336 |
| - | - | - | - | [61] | 2013 | 1.204 | - |
| - | - | - | - | [62] | 2014 | 24 | 6 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mohammed, Z.; Elfadel, I.M.; Rasras, M. Monolithic Multi Degree of Freedom (MDoF) Capacitive MEMS Accelerometers. Micromachines 2018, 9, 602. https://doi.org/10.3390/mi9110602
Mohammed Z, Elfadel IM, Rasras M. Monolithic Multi Degree of Freedom (MDoF) Capacitive MEMS Accelerometers. Micromachines. 2018; 9(11):602. https://doi.org/10.3390/mi9110602
Chicago/Turabian StyleMohammed, Zakriya, Ibrahim (Abe) M. Elfadel, and Mahmoud Rasras. 2018. "Monolithic Multi Degree of Freedom (MDoF) Capacitive MEMS Accelerometers" Micromachines 9, no. 11: 602. https://doi.org/10.3390/mi9110602
APA StyleMohammed, Z., Elfadel, I. M., & Rasras, M. (2018). Monolithic Multi Degree of Freedom (MDoF) Capacitive MEMS Accelerometers. Micromachines, 9(11), 602. https://doi.org/10.3390/mi9110602