Monostable Dynamic Analysis of Microbeam-Based Resonators via an Improved One Degree of Freedom Model



Abstract
:1. Introduction
2. Mathematical Model
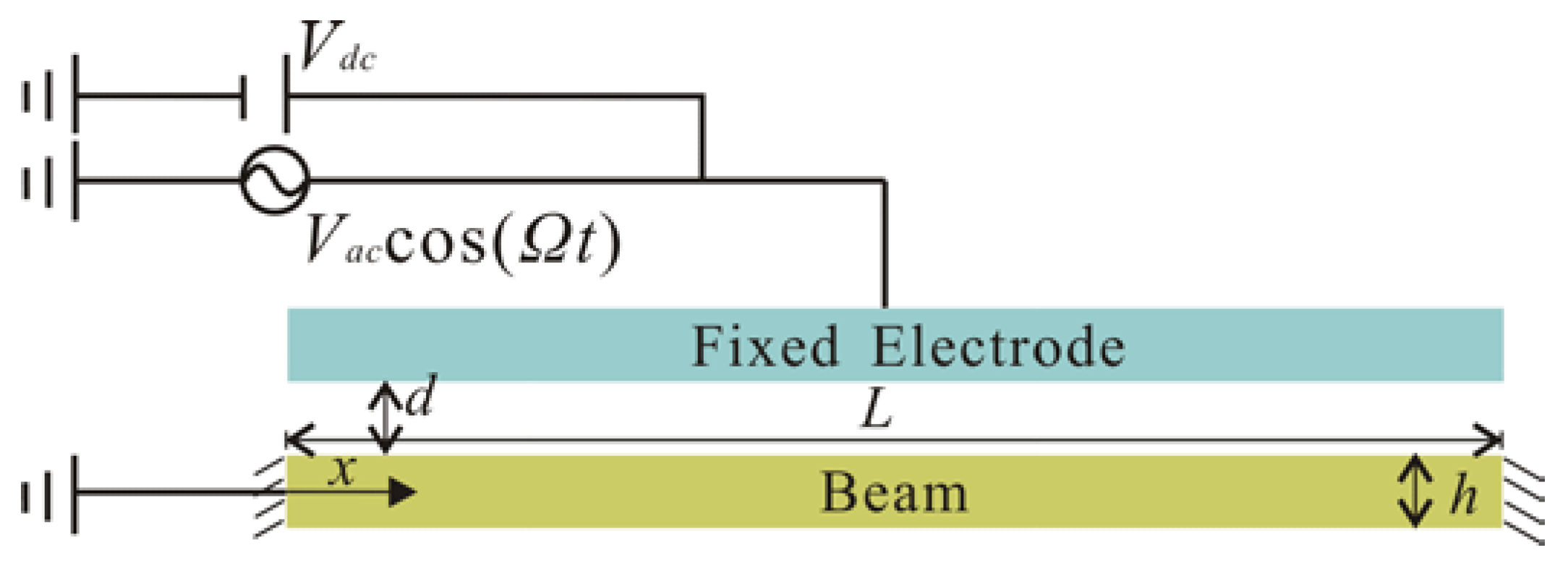
2.1. Governing Equation
2.2. The Nonlinear Galerkin Method
3. Perturbation Analysis
4. Results and Discussion
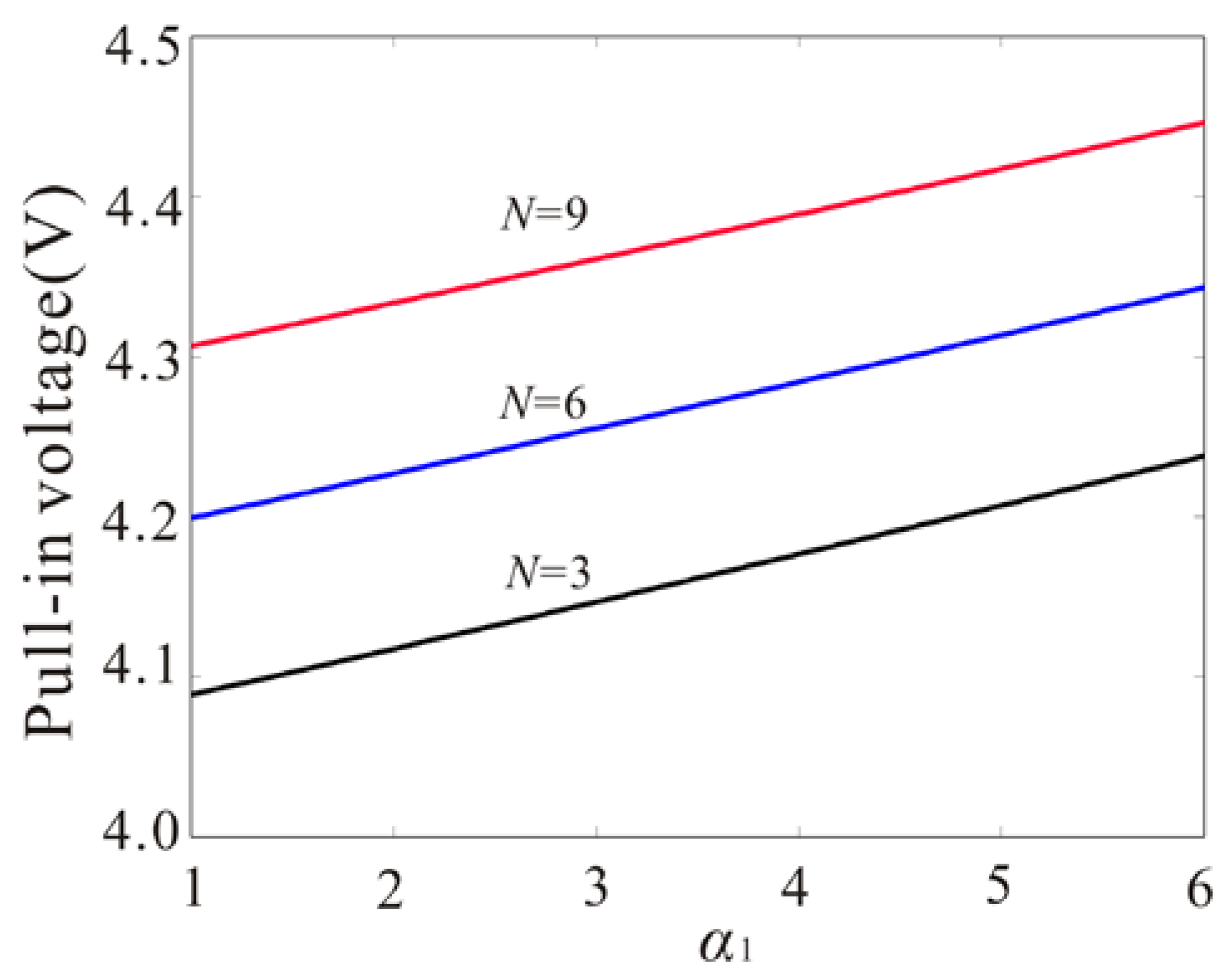
4.1. Convergence Analysis
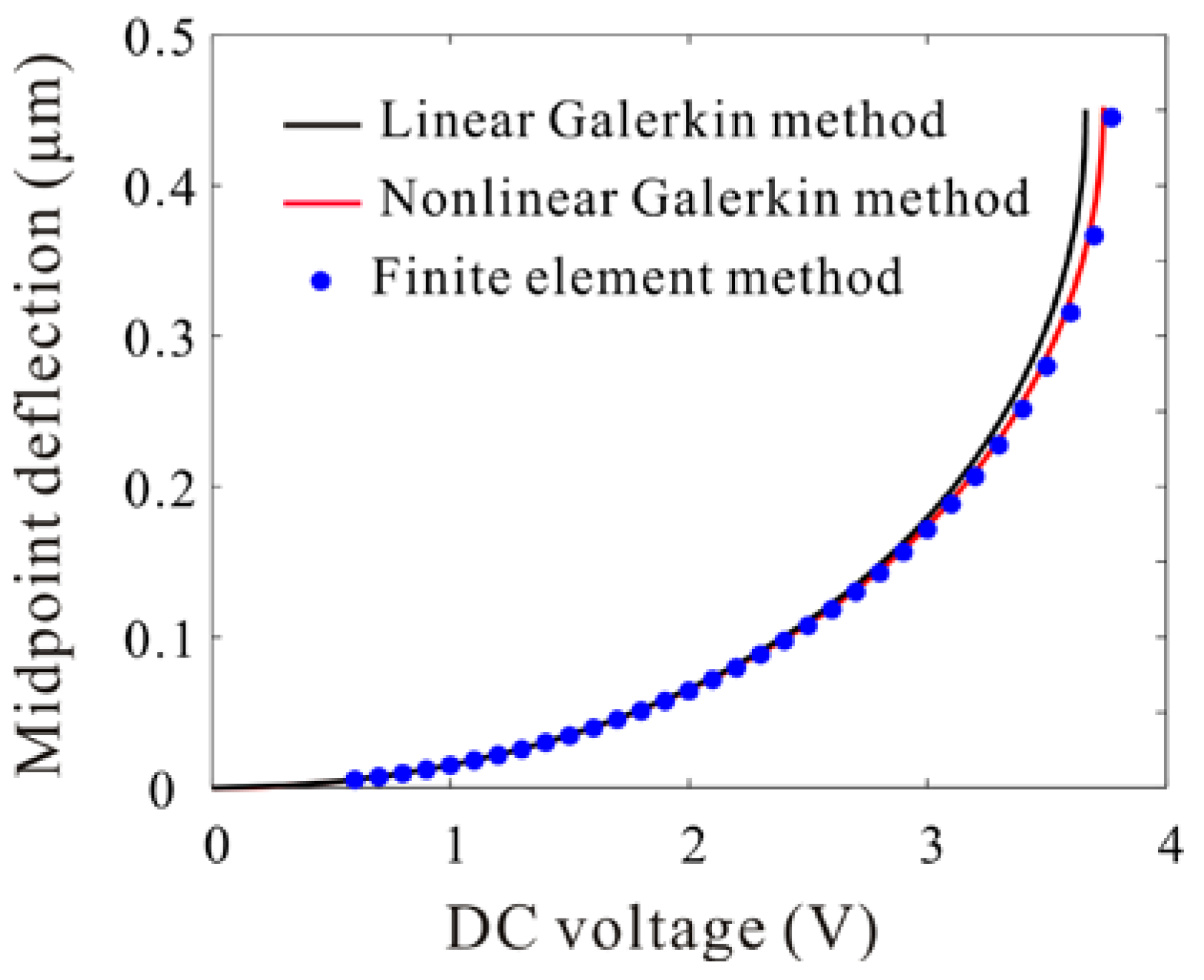
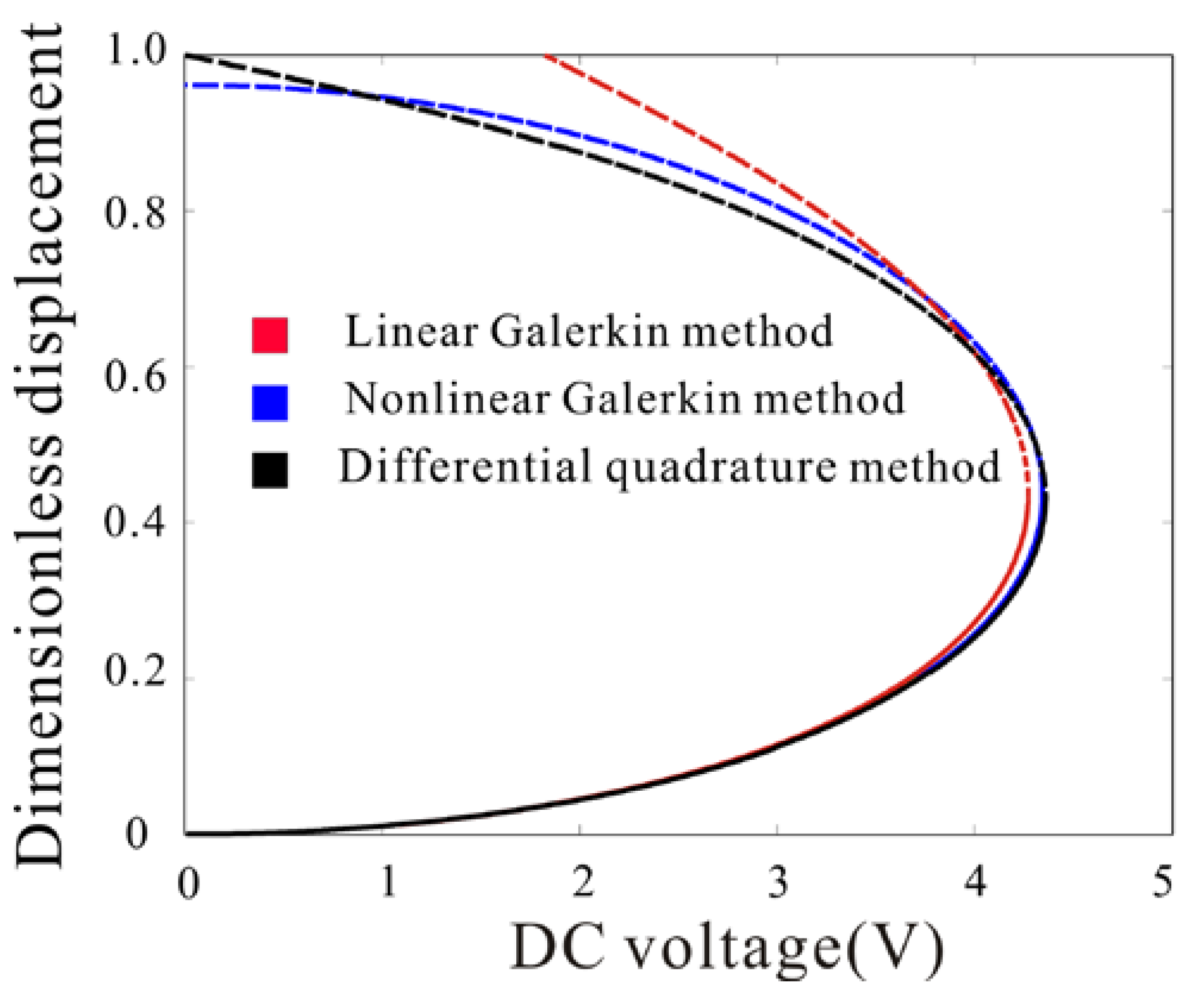
4.2. Static Analysis
4.3. Dynamic Analysis
4.3.1. Small Vibration
4.3.2. Monostable Large Amplitude Vibration
- (a)
- Under monostable vibration, and approximate to zero. The system is equivalent to approximate linear vibration.
- (b)
- The maximum amplitude of approximate linear vibration is proportional to exciting force that is decided with the product of DC voltage and AC voltage.
- (c)
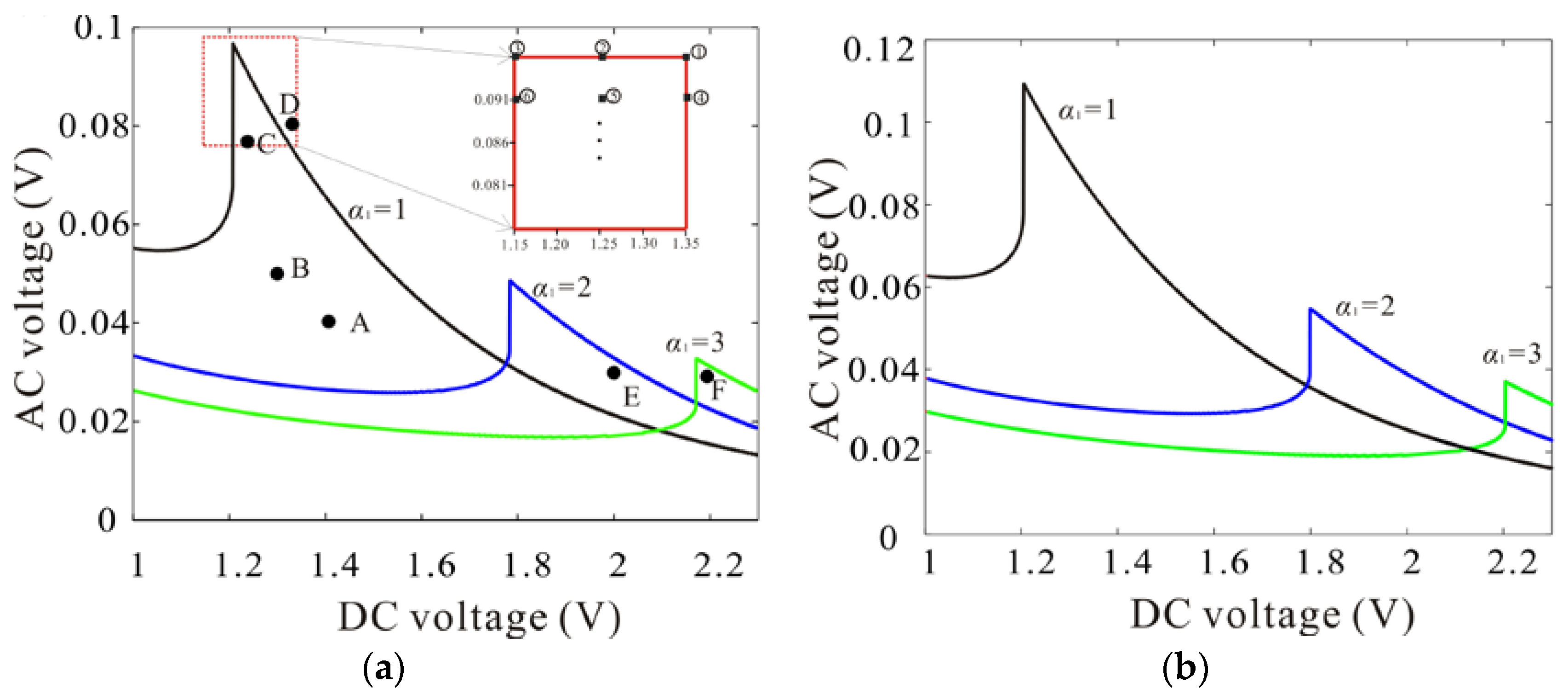
- Optimization parameters, which can realize the maximum amplitude of monostable vibration, are taken near the peak regions in Figure 7 (for example, the red frame with ).
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
Appendix A
References
- Kouravand, S. Design and modeling of some sensing and actuating mechanisms for MEMS applications. Appl. Math. Model. 2011, 35, 5173–5181. [Google Scholar] [CrossRef]
- Rhoads, J.F.; Shaw, S.W.; Turner, K.L. Nonlinear Dynamics and Its Applications in Micro- and Nanoresonators. J. Dyn. Syst. Meas. Control 2010, 132, 034001. [Google Scholar] [CrossRef]
- Zhang, Z.; Liang, J.; Zhang, D.; Pang, W.; Zhang, H. A Novel Bulk Acoustic Wave Resonator for Filters and Sensors Applications. Micromachines 2015, 6, 1306–1316. [Google Scholar] [CrossRef]
- Jung, J.; Kim, P.; Lee, J.I.; Seok, J. Nonlinear dynamic and energetic characteristics of piezoelectric energy harvester with two rotatable external magnets. Int. J. Mech. Sci. 2015, 92, 206–222. [Google Scholar] [CrossRef]
- Lee, J.; Jeong, B.; Park, S.; Eun, Y.; Kim, J. Micromachined Resonant Frequency Tuning Unit for Torsional Resonator. Micromachines 2017, 8, 342. [Google Scholar] [CrossRef]
- Ramanan, A.; Teoh, Y.; Ma, W.; Ye, W. Characterization of a Laterally Oscillating Microresonator Operating in the Nonlinear Region. Micromachines 2016, 7, 132. [Google Scholar] [CrossRef]
- Toan, N.; Shimazaki, T.; Inomata, N.; Song, Y.; Ono, T. Design and Fabrication of Capacitive Silicon Nanomechanical Resonators with Selective Vibration of a High-Order Mode. Micromachines 2017, 8, 312. [Google Scholar] [CrossRef]
- Song, Z.K.; Li, H.X.; Sun, K.B. Adaptive dynamic surface control for MEMS triaxial gyroscope with nonlinear inputs. Nonlinear Dyn. 2014, 78, 173–182. [Google Scholar] [CrossRef]
- Verotti, M.; Dochshanov, A.; Belfiore, N.P. A Comprehensive Survey on Microgrippers Design: Mechanical Structure. J. Mech. Des. 2017, 139, 060801. [Google Scholar] [CrossRef]
- Dochshanov, A.; Verotti, M.; Belfiore, N.P. A Comprehensive Survey on Microgrippers Design: Operational Strategy. J. Mech. Des. 2017, 139, 070801. [Google Scholar] [CrossRef]
- Rhoads, J.F.; Shaw, S.W.; Turner, K.L. The nonlinear response of resonant microbeam systems with purely-parametric electrostatic actuation. J. Micromech. Microeng. 2006, 16, 890–899. [Google Scholar] [CrossRef]
- Zhong, Z.Y.; Zhang, W.M.; Meng, G.; Wu, J. Inclination Effects on the Frequency Tuning of Comb-Driven Resonators. J. Microelectromechan. Syst. 2013, 22, 865–875. [Google Scholar] [CrossRef]
- Han, J.X.; Zhang, Q.C.; Wang, W. Design considerations on large amplitude vibration of a doubly clamped microresonator with two symmetrically located electrodes. Commun. Nonlinear Sci. Numer. Simul. 2015, 22, 492–510. [Google Scholar] [CrossRef]
- Masri, K.M.; Shao, S.; Younis, M.I. Delayed feedback controller for microelectromechanical systems resonators undergoing large motion. J. Vib. Control 2015, 13, 2604–2615. [Google Scholar] [CrossRef]
- Tadi Beni, Y.; Koochi, A.; Abadyan, M. Theoretical study of the effect of Casimir force, elastic boundary conditions and size dependency on the pull-in instability of beam-type NEMS. Phys. E Low Dimens. Syst. Nanostruct. 2011, 43, 979–988. [Google Scholar] [CrossRef]
- Mousavi, T.; Bornassi, S.; Haddadpour, H. The effect of small scale on the pull-in instability of nano-switches using DQM. Int. J. Solids Struct. 2013, 50, 1193–1202. [Google Scholar] [CrossRef]
- Ghayesh, M.H.; Farokhi, H.; Amabili, M. Nonlinear behaviour of electrically actuated MEMS resonators. Int. J. Eng. Sci. 2013, 71, 137–155. [Google Scholar] [CrossRef]
- Ma, H.; Gao, X.; Reddy, J. A microstructure-dependent Timoshenko beam model based on a modified couple stress theory. J. Mech. Phys. Solids 2008, 56, 3379–3391. [Google Scholar] [CrossRef]
- Anthoine, A. Effect of couple-stresses on the elastic bending of beams. Int. J. Solids Struct. 2000, 37, 1003–1018. [Google Scholar] [CrossRef]
- Yang, F.; Chong, A.C.M.; Lam, D.C.C.; Tong, P. Couple stress-based strain gradient theory for elasticity. Int. J. Solids Struct. 2002, 39, 2731–2743. [Google Scholar] [CrossRef]
- Guo, C.Z.; Gary, K.F. Behavioral Modeling of a CMOS–MEMS Nonlinear Parametric Resonator. J. Microelectromech. Syst. 2013, 22, 1447–1459. [Google Scholar] [CrossRef]
- Zhang, W.M.; Meng, G. Nonlinear Dynamic Analysis of Electrostatically Actuated Resonant MEMS Sensors under Parametric Excitation. IEEE Sens. J. 2007, 7, 370–380. [Google Scholar] [CrossRef]
- Nayfeh, A.H.; Lacarbonara, W. On the Discretization of Distributed-Parameter Systems with Quadratic and Cubic Nonlinearities. Nonlinear Dyn. 1997, 13, 203–220. [Google Scholar] [CrossRef]
- Zhang, W.M.; Meng, G. Nonlinear dynamical system of micro-cantilever under combined parametric and forcing excitations in MEMS. Sens. Actuators A Phys. 2005, 119, 291–299. [Google Scholar] [CrossRef]
- Younis, M.I.; Abdel-Rahman, E.M.; Nayfeh, A.H. A Reduced-Order Model for Electrically Actuated Microbeam-Based MEMS. J. Microelectromech. Syst. 2003, 12, 672–680. [Google Scholar] [CrossRef]
- Sadeghian, H.; Rezazadeh, G.; Peter, M.O. Application of the Generalized Differential Quadrature Method to the Study of Pull-In Phenomena of MEMS Switches. J. Microelectromech. Syst. 2007, 16, 1334–1340. [Google Scholar] [CrossRef]
- Sadeghian, H.; Rezazadeh, G. Comparison of generalized differential quadrature and Galerkin methods for the analysis of micro-electro-mechanical coupled systems. Commun. Nonlinear Sci. Numer. Simul. 2009, 14, 2807–2816. [Google Scholar] [CrossRef]
- Ilyas, S.; Ramini, A.; Arevalo, A.; Younis, M.I. An Experimental and Theoretical Investigation of a Micromirror under Mixed-Frequency Excitation. J. Microelectromech. Syst. 2015, 24, 1124–1131. [Google Scholar] [CrossRef]
- Younis, M.I.; Ouakad, H.M.; Alsaleem, F.M.; Miles, R.; Cui, W. Nonlinear Dynamics of MEMS Arches under Harmonic Electrostatic Actuation. J. Microelectromech. Syst. 2010, 19, 647–656. [Google Scholar] [CrossRef]
- Younis, M.I.; Nayfeh, A.H. A study of the nonlinear response of a resonant microbeam to an electric actuation. Nonlinear Dyn. 2003, 31, 91–117. [Google Scholar] [CrossRef]
- Alcheikh, N.; Ramini, A.; Abdullah, M.; Younis, M.I. Tunable Clamped Guided Arch Resonators Using Electrostatically Induced Axial Loads. Micromachines 2017, 8, 14. [Google Scholar] [CrossRef]
- Masri, K.M.; Younis, M.I. Investigation of the dynamics of a clamped–clamped microbeam near symmetric higher order modes using partial electrodes. Int. J. Dyn. Control 2015, 3, 173–182. [Google Scholar] [CrossRef]
- Nayfeh, A.H.; Younis, M.I.; Abdel-Rahman, E.M. Dynamic pull-in phenomenon in MEMS resonators. Nonlinear Dyn. 2006, 48, 153–163. [Google Scholar] [CrossRef]
- Ouakad, H.M.; Younis, M.I. The dynamic behavior of MEMS arch resonators actuated electrically. Int. J. Nonlinear Mech. 2010, 45, 704–713. [Google Scholar] [CrossRef]
- Cao, D.Q. A novel order reduction method for nonlinear dynamical system under external periodic excitations. Sci. China Technol. Sci. 2010, 53, 684–691. [Google Scholar] [CrossRef]
- Matthies, H.G.; Meyer, M. Nonlinear Galerkin methods for the model reduction of nonlinear dynamical systems. Comput. Struct. 2003, 81, 1277–1286. [Google Scholar] [CrossRef]
- Kang, W.; Zhang, J.Z.; Ren, S.; Lei, P.F. Nonlinear Galerkin method for low-dimensional modeling of fluid dynamic system using POD modes. Commun. Nonlinear Sci. Numer. Simul. 2015, 22, 943–952. [Google Scholar] [CrossRef]
- Zhang, W.; Yan, H.; Peng, Z.; Meng, G. Electrostatic pull-in instability in MEMS/NEMS, A review. Sens. Actuators A Phys. 2014, 214, 187–218. [Google Scholar] [CrossRef]
- Abdel-Rahman, E.M.; Younis, M.I.; Nayfeh, A.H. Characterization of the mechanical behavior of an electrically actuated microbeam. J. Micromech. Microeng. 2002, 12, 759–766. [Google Scholar] [CrossRef]
- Zhang, W.; Hu, K.; Peng, Z.; Meng, G. Tunable micro- and nanomechanical resonators. Sensors 2015, 15, 26478–26566. [Google Scholar] [CrossRef] [PubMed]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Units |
|---|---|---|
| Mass density ρ | 2300 | kg/m3 |
| Young’s modulus E | 169 | Gpa |
| Beam length L | 365 | μm |
| Beam width b | 10 | μm |
| Beam thickness h | 1 | μm |
| Axial load | variable | N |
| Viscous damping c | 3.42 × 10−5 | Ns/m2 |
| Case | DC Voltage (V) | Linear Galerkin Method Results (kHz) | Nonlinear Galerkin Method Results (kHz) | Finite Element Results (kHz) | Error |
|---|---|---|---|---|---|
| 1 | 2 | 62.44 | 62.77 | 62.82 | 0.6%; 0.1% |
| 2 | 2.5 | 59.85 | 60.42 | 60.54 | 1.1%; 0.2% |
| 3 | 3 | 55.53 | 56.55 | 56.87 | 2.4%; 0.6% |
| 4 | 3.5 | 44.33 | 47.59 | 48.71 | 9.0%; 2.3% |
| Case | Gap Width (μm) | Linear Galerkin Method Results (V) | Nonlinear Galerkin Method Results (V) | Finite Element Results (V) | Error |
|---|---|---|---|---|---|
| 1 | 0.5 | 1.25 | 1.27 | 1.27 | 1.6%; 0% |
| 2 | 1 | 3.66 | 3.74 | 3.76 | 2.7%; 0.5% |
| 3 | 1.5 | 7.16 | 7.39 | 7.50 | 4.5%; 1.5% |
| 4 | 2 | 11.94 | 12.47 | 12.85 | 7.1%; 3.0% |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, L.; Zhang, Q.; Wang, W.; Han, J. Monostable Dynamic Analysis of Microbeam-Based Resonators via an Improved One Degree of Freedom Model. Micromachines 2018, 9, 89. https://doi.org/10.3390/mi9020089
Li L, Zhang Q, Wang W, Han J. Monostable Dynamic Analysis of Microbeam-Based Resonators via an Improved One Degree of Freedom Model. Micromachines. 2018; 9(2):89. https://doi.org/10.3390/mi9020089
Chicago/Turabian StyleLi, Lei, Qichang Zhang, Wei Wang, and Jianxin Han. 2018. "Monostable Dynamic Analysis of Microbeam-Based Resonators via an Improved One Degree of Freedom Model" Micromachines 9, no. 2: 89. https://doi.org/10.3390/mi9020089
APA StyleLi, L., Zhang, Q., Wang, W., & Han, J. (2018). Monostable Dynamic Analysis of Microbeam-Based Resonators via an Improved One Degree of Freedom Model. Micromachines, 9(2), 89. https://doi.org/10.3390/mi9020089