
Colocation for SLAM-Tracked VR Headsets with Hand Tracking


Abstract
:1. Introduction
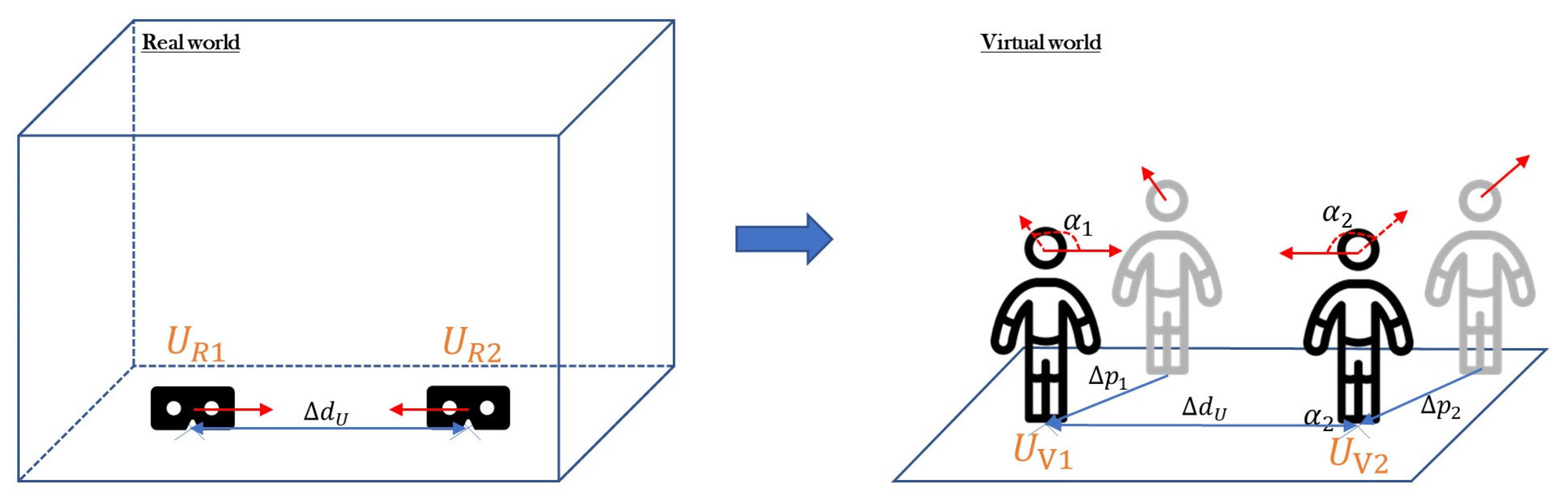
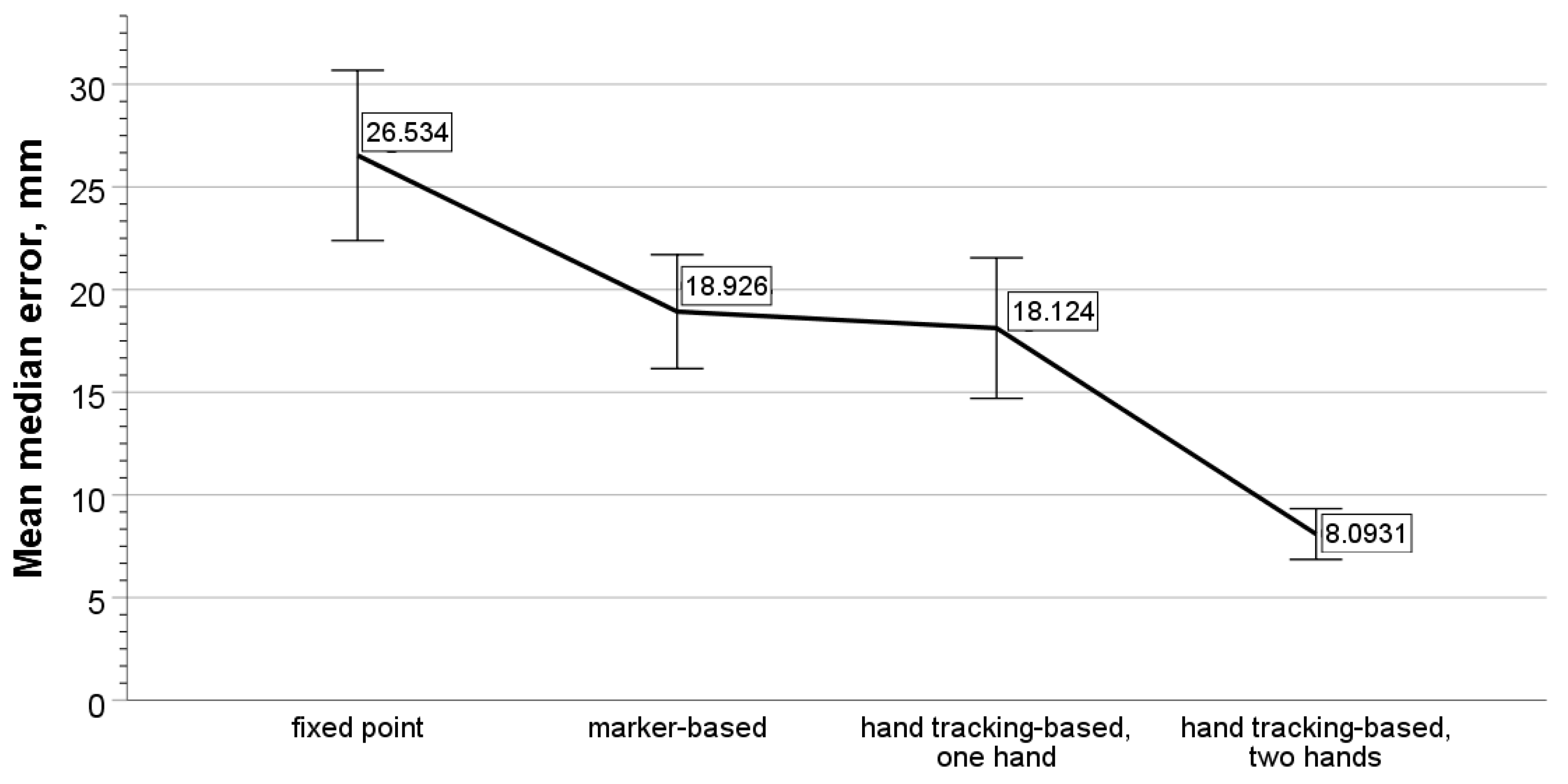
- Fixed-point calibration, for which all colocated HMDs are placed at predefined positions within the physical environment.
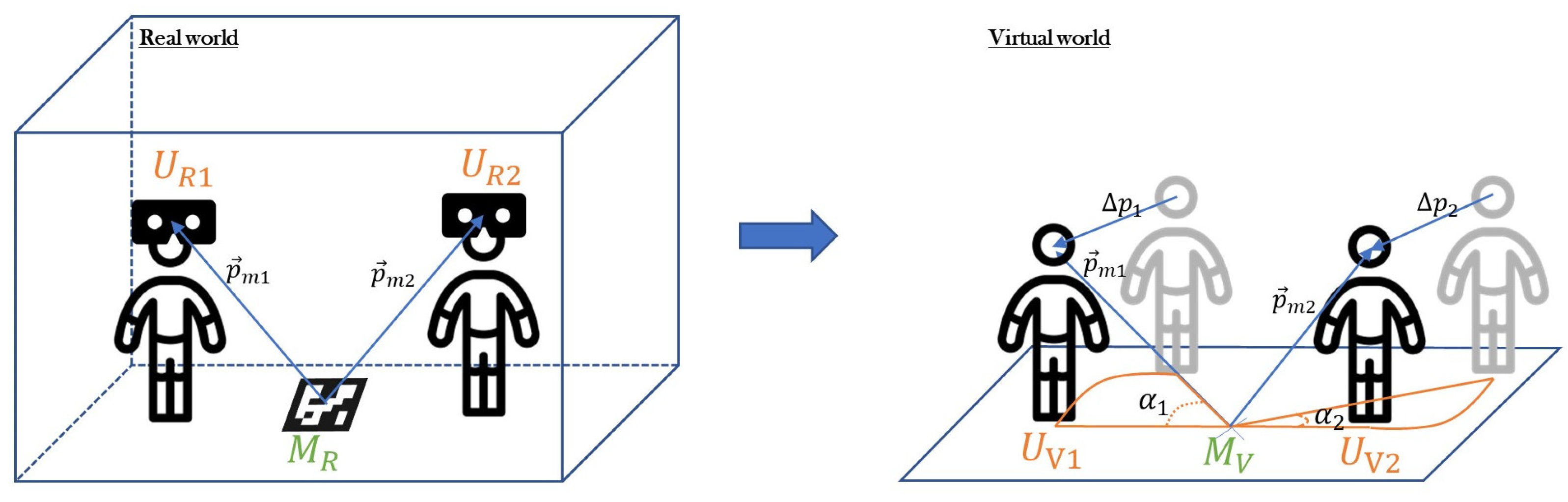
- Marker-based calibration, for which a marker placed in the physical environment needs to be tracked simultaneously by all client applications running on users’ HMDs.
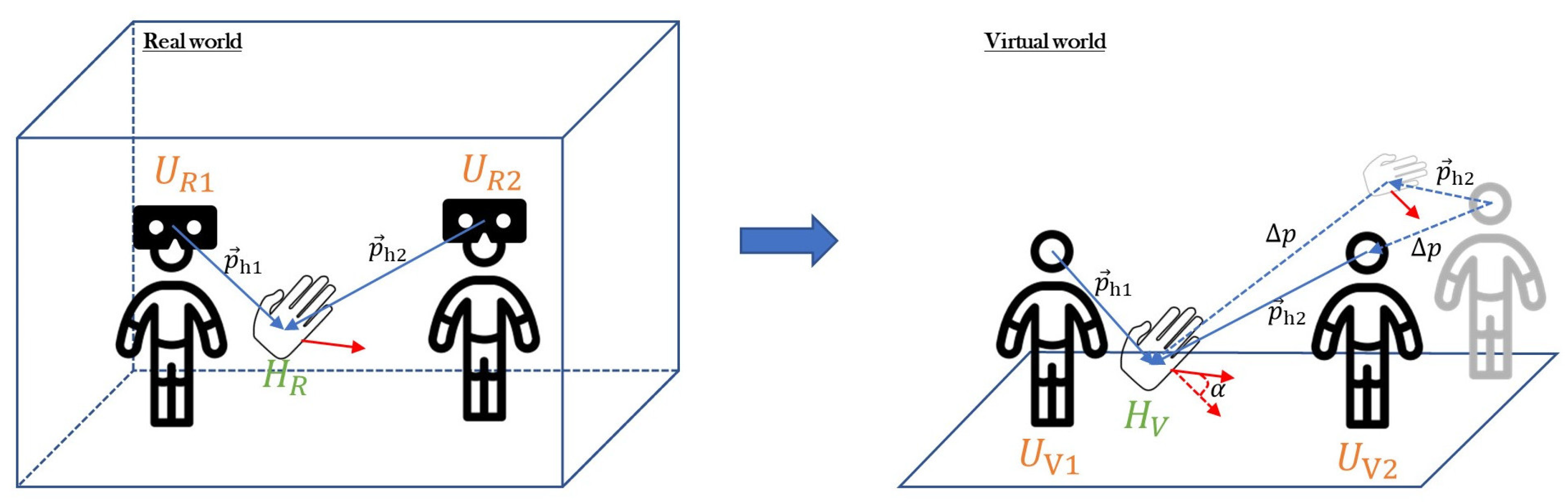
- Hand tracking-based calibration, in which the hands of one of the colocated users are used as spatial anchors simultaneously tracked by all client applications.
- A new calibration method for shared colocated VR scenarios using SLAM-tracked HMDs with hand tracking. Our method uses user hands as spatial calibration anchors and therefore does not require any additional infrastructure. The method shows superior calibration accuracy.
- An experimental evaluation of the accuracy of three colocation calibration methods.
- Analysis of limitations and future possibilities of the discussed calibration methods.
2. Related Work
2.1. Colocation for SLAM Tracked Headsets
2.2. Hand Tracking for VR
3. Calibration Methods
3.1. Fixed-Point Calibration
3.2. Marker-Based Calibration
3.3. Hand Tracking-Based Calibration
Variant Based on the Tracking of Two Hands
4. Evaluation
4.1. Evaluation Design
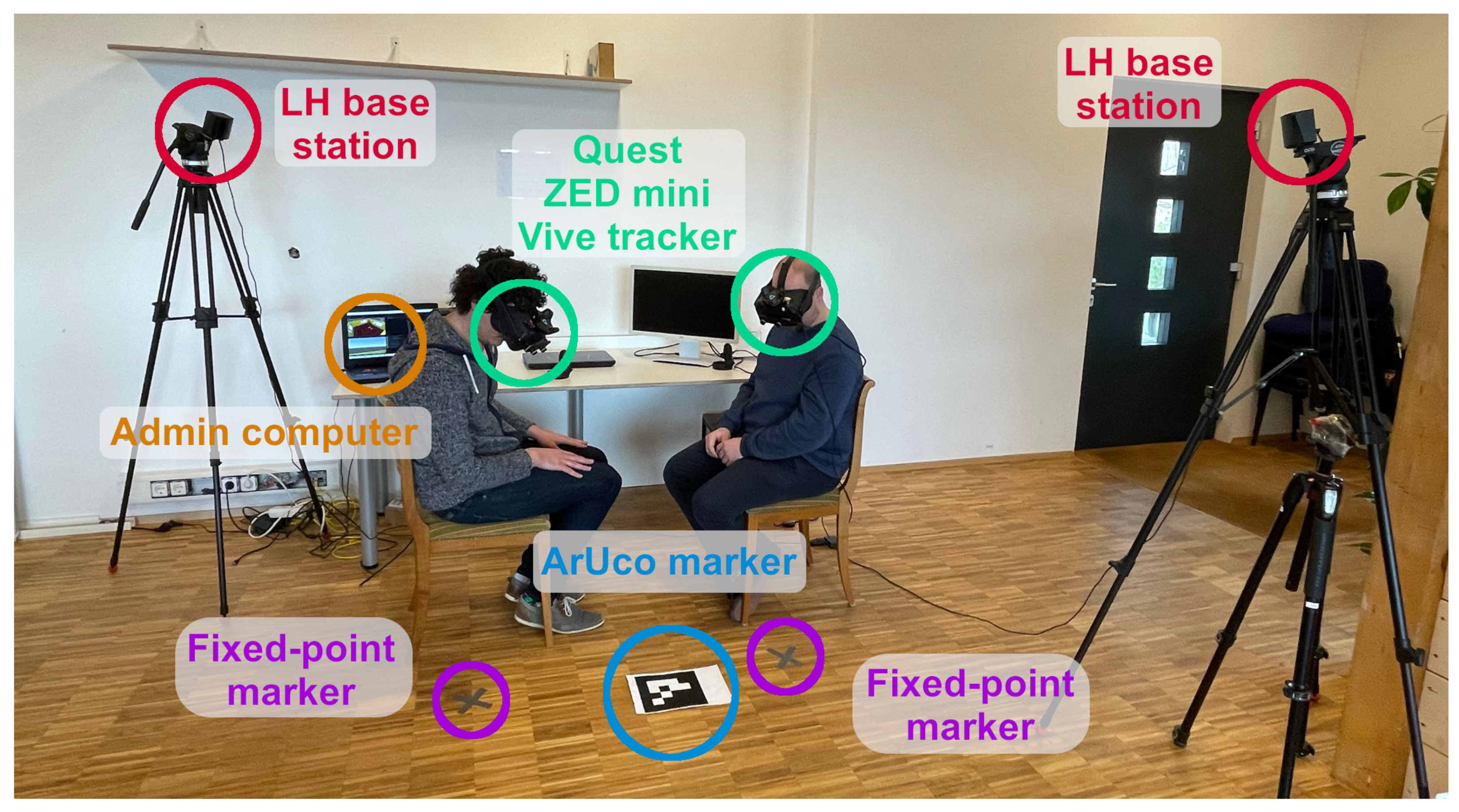
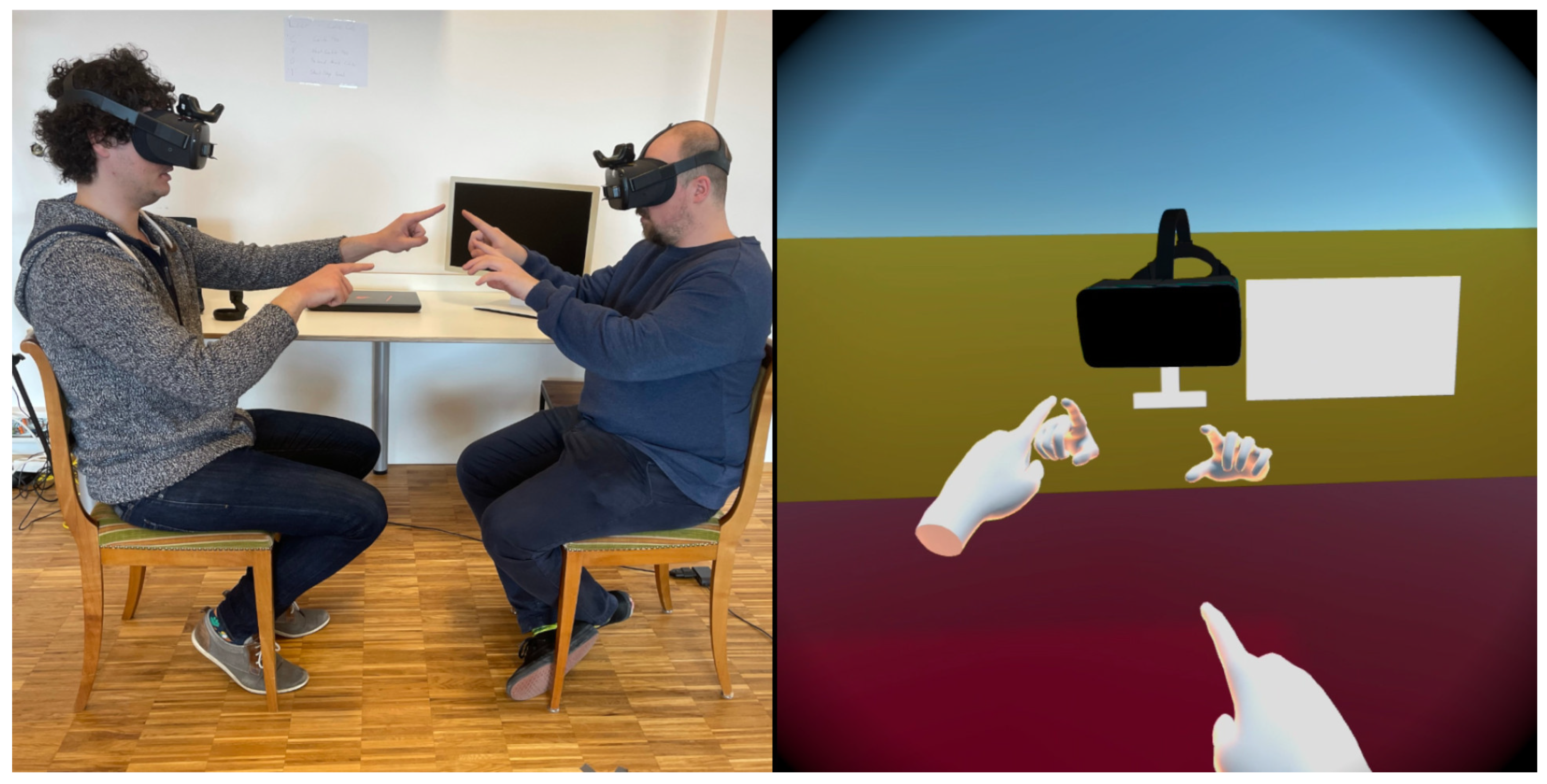
4.2. Experimental Setup and Procedure
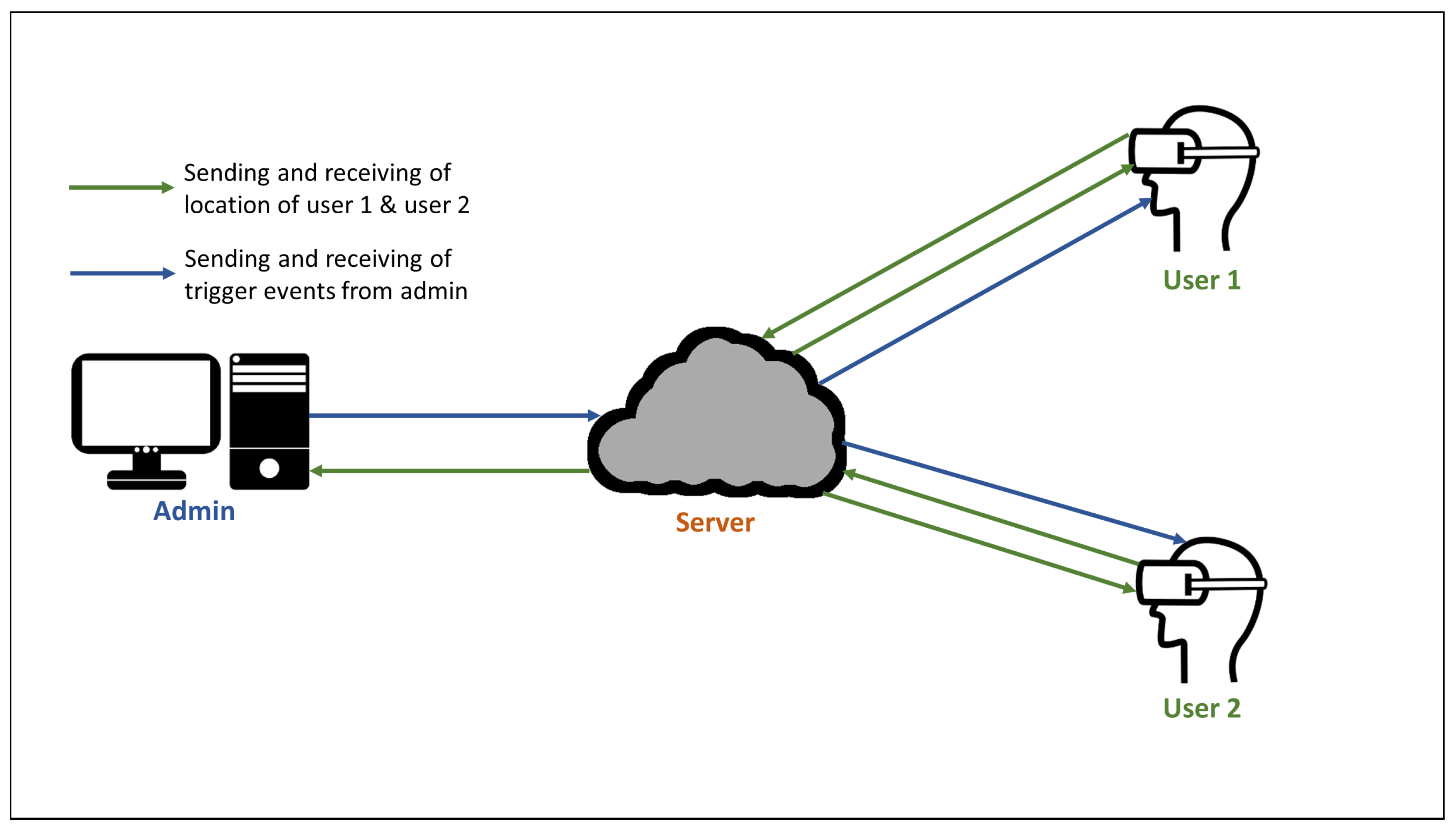
- Start the administrative client that is also the master client (host) in the PUN distribution pipeline, to open the network connection.
- Connect both HMDs with respective connected Vive trackers.
- Ensure correct synchronization and assignments of HMDs and Vive trackers in the administration client.
- Collect data following the procedure detailed in Section 4.1.
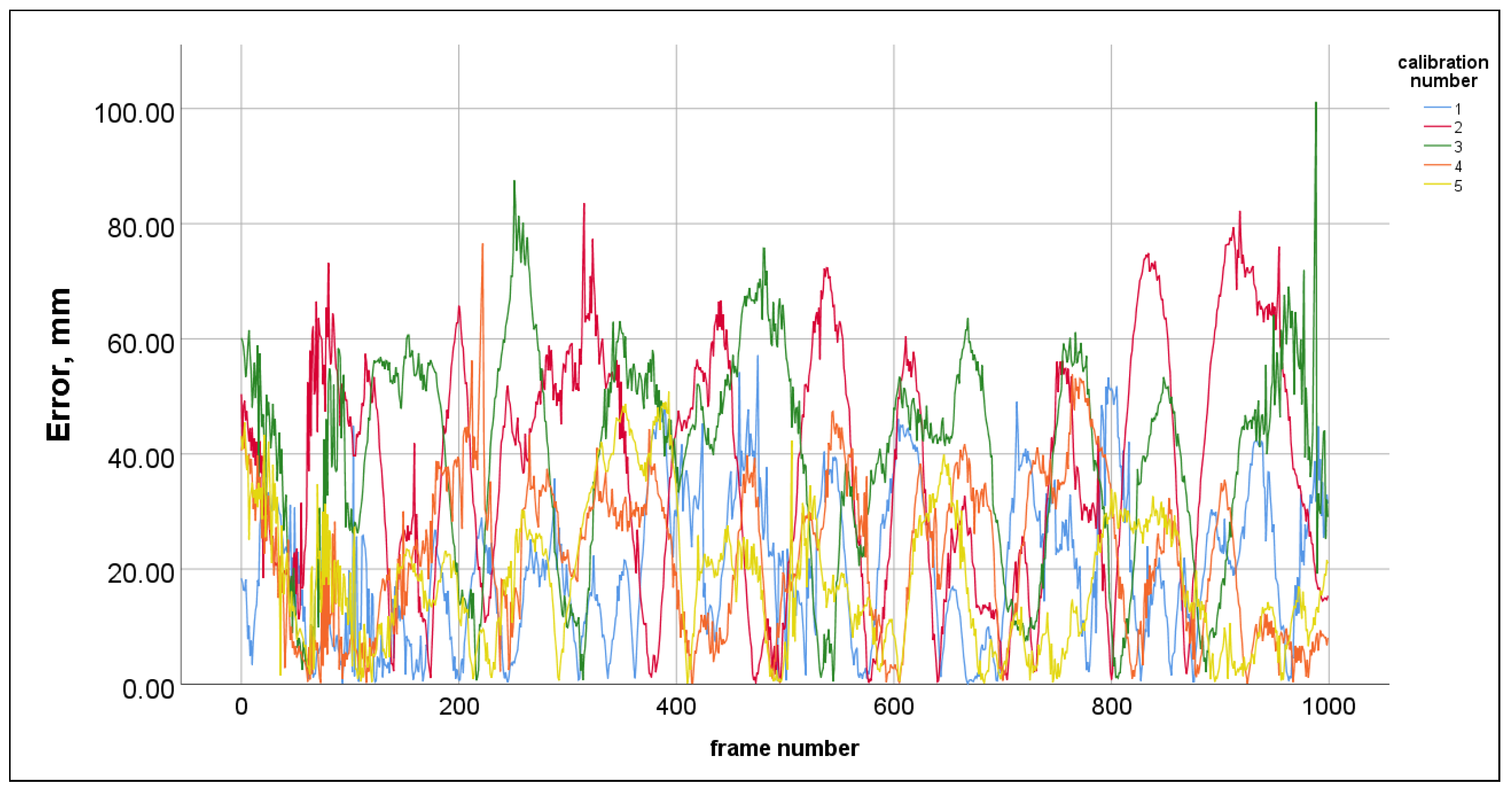
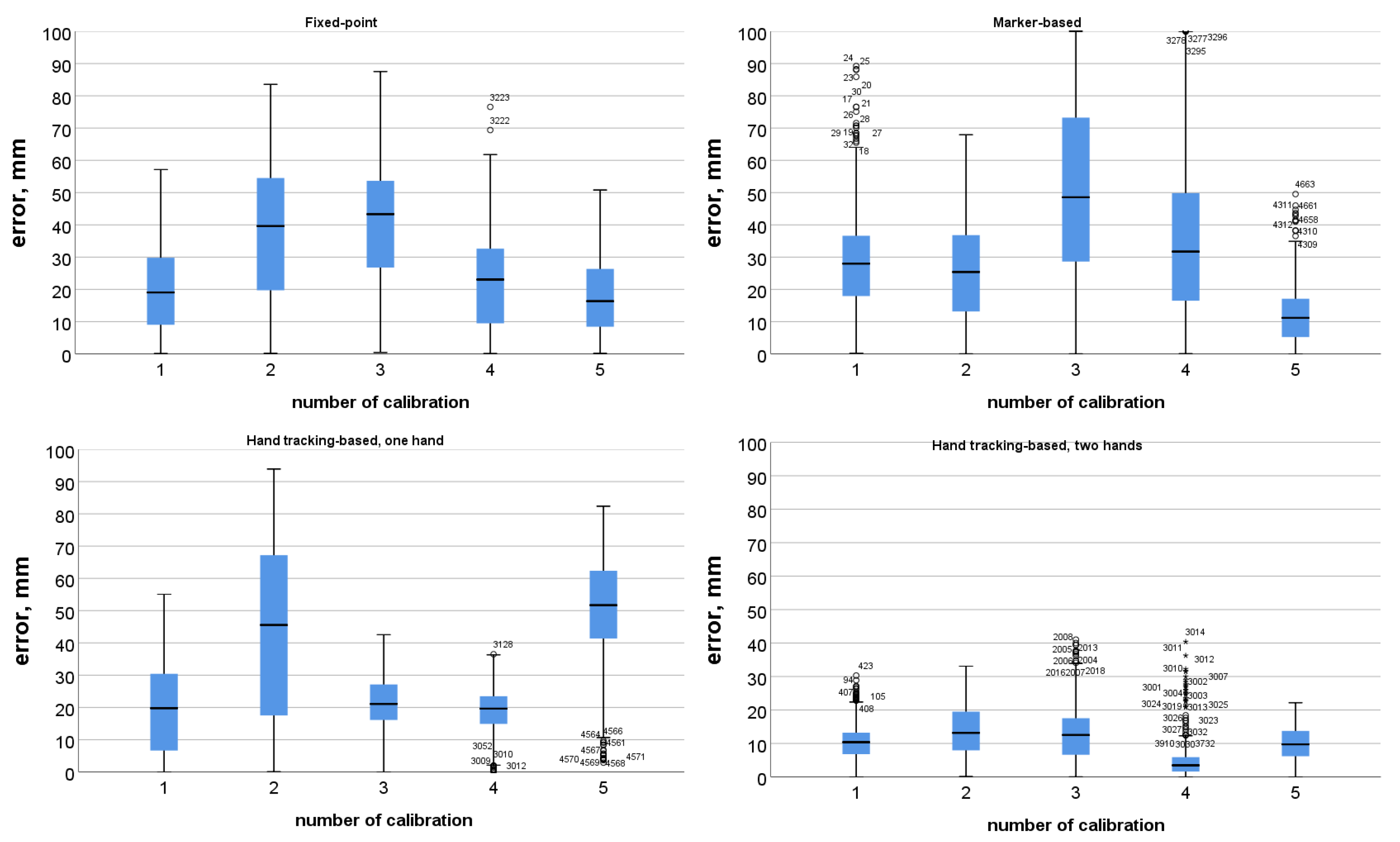
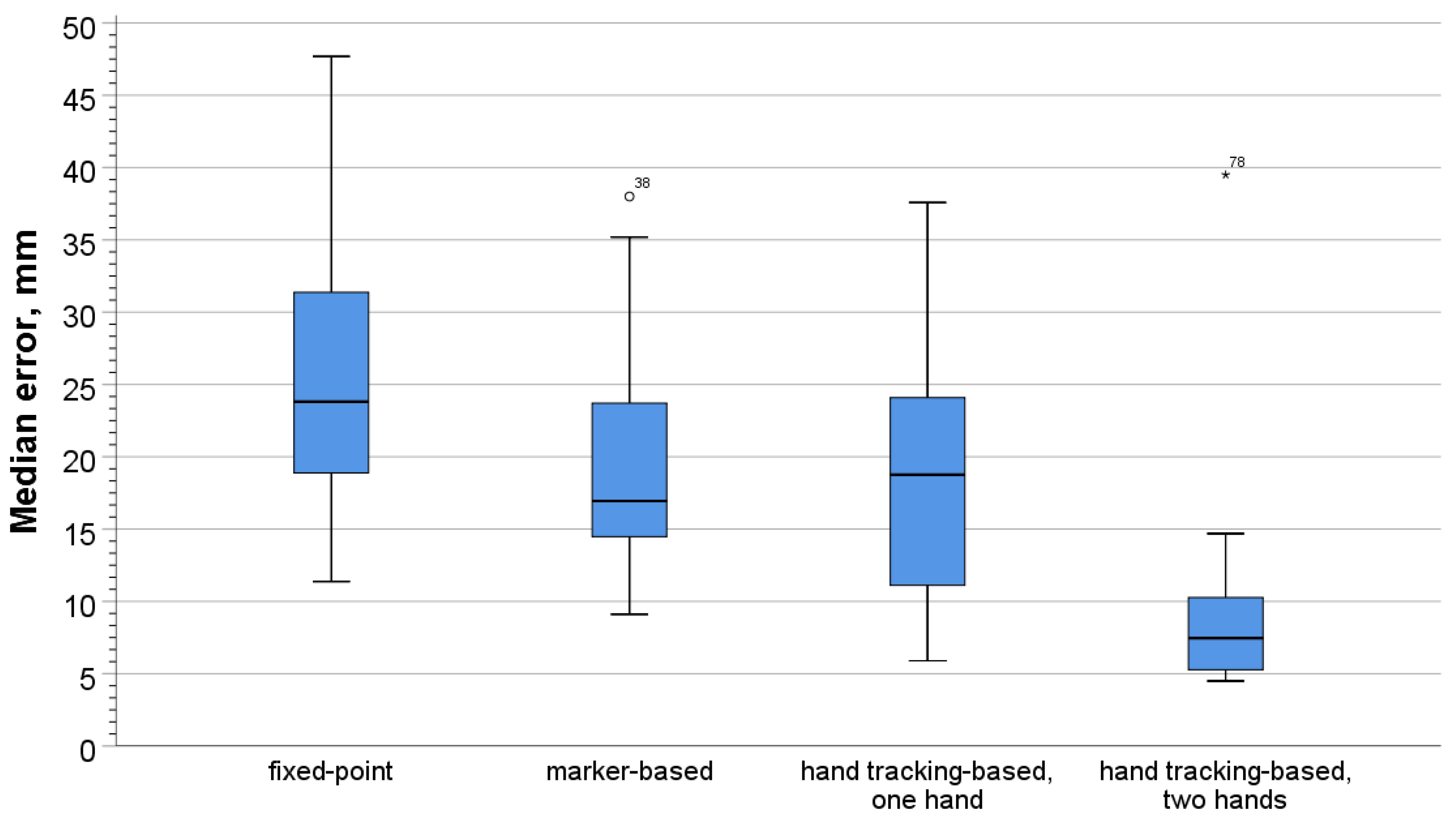
4.3. Results
5. Discussion
5.1. Consistency and Potential for Improvement
5.2. Ease of Setup
5.3. Scalability
5.4. Applicability and Future of Hand Tracking-Based Calibration
5.5. Colocation in Seated VR Scenarios
6. Conclusions
Supplementary Materials
Author Contributions
Funding
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| VR | Virtual Reality |
| HMD | Head-Mounted Display |
| SLAM | Simultaneous Localization and Mapping |
| DOF | Degrees of Freedom |
References
- Shi, Y.; Du, J.; Lavy, S.; Zhao, D. A Multiuser Shared Virtual Environment for Facility Management. Procedia Eng. 2016, 145, 120–127. [Google Scholar] [CrossRef] [Green Version]
- Podkosova, I. Walkable Multi-User VR: Effects of Physical and Virtual Colocation. Ph.D. Thesis, Research Unit of Computer Graphics, Institute of Visual Computing and Human-Centered Technology, Faculty of Informatics, TU Wien, Favoritenstrasse 9-11/E193-02, Vienna, Austria, 2019. [Google Scholar]
- Podkosova, I.; Vasylevska, K.; Schoenauer, C.; Vonach, E.; Fikar, P.; Bronederk, E.; Kaufmann, H. Immersivedeck: A large-scale wireless VR system for multiple users. In Proceedings of the 2016 IEEE 9th Workshop on Software Engineering and Architectures for Realtime Interactive Systems (SEARIS), Greenville, SC, USA, 20–20 March 2016; pp. 1–7. [Google Scholar] [CrossRef]
- Furtado, J.S.; Liu, H.H.T.; Lai, G.; Lacheray, H.; Desouza-Coelho, J. Comparative Analysis of OptiTrack Motion Capture Systems. In Advances in Motion Sensing and Control for Robotic Applications; Janabi-Sharifi, F., Melek, W., Eds.; Springer International Publishing: Cham, Switzerland, 2019; pp. 15–31. [Google Scholar]
- Taketomi, T.; Uchiyama, H.; Ikeda, S. Visual SLAM algorithms: A survey from 2010 to 2016. IPSJ Trans. Comput. Vis. Appl. 2017, 9. [Google Scholar] [CrossRef]
- He, Z.; Du, R.; Perlin, K. CollaboVR: A Reconfigurable Framework for Creative Collaboration in Virtual Reality. In Proceedings of the 2020 IEEE International Symposium on Mixed and Augmented Reality (ISMAR), Porto de Galinhas, Brazil, 9–13 November 2020; pp. 542–554. [Google Scholar] [CrossRef]
- Niehorster, D.; Li, L.; Lappe, M. The Accuracy and Precision of Position and Orientation Tracking in the HTC Vive Virtual Reality System for Scientific Research. i-Perception 2017, 8. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- McGill, M.; Gugenheimer, J.; Freeman, E. A Quest for Co-Located Mixed Reality: Aligning and Assessing SLAM Tracking for Same-Space Multi-User Experiences. In Proceedings of the 26th ACM Symposium on Virtual Reality Software and Technology; VRST’20; Association for Computing Machinery: New York, NY, USA, 2020. [Google Scholar] [CrossRef]
- Layng, K.; Perlin, K.; Herscher, S.; Brenner, C.; Meduri, T. Cave: Making Collective Virtual Narrative. In ACM SIGGRAPH 2019 Art Gallery; SIGGRAPH’19; Association for Computing Machinery: New York, NY, USA, 2019. [Google Scholar] [CrossRef]
- DeFanti, C.; Geiger, D.; Panozzo, D. Co-Located Augmented and Virtual Reality Systems. Ph.D. Thesis, New York University, New York, NY, USA, 2019. [Google Scholar]
- Weissker, T.; Tornow, P.; Froehlich, B. Tracking Multiple Collocated HTC Vive Setups in a Common Coordinate System. In Proceedings of the 2020 IEEE Conference on Virtual Reality and 3D User Interfaces Abstracts and Workshops (VRW), Atlanta, GA, USA, 22–26 March 2020; pp. 592–593. [Google Scholar] [CrossRef]
- Fox, D.; Ko, J.; Konolige, K.; Limketkai, B.; Schulz, D.; Stewart, B. Distributed Multirobot Exploration and Mapping. Proc. IEEE 2006, 94, 1325–1339. [Google Scholar] [CrossRef]
- Herscher, S.; DeFanti, C.; Vitovitch, N.G.; Brenner, C.; Xia, H.; Layng, K.; Perlin, K. CAVRN: An Exploration and Evaluation of a Collective Audience Virtual Reality Nexus Experience. In Proceedings of the 32nd Annual ACM Symposium on User Interface Software and Technology; UIST’19; Association for Computing Machinery: New York, NY, USA, 2019; pp. 1137–1150. [Google Scholar] [CrossRef]
- Zimmerman, T.G.; Lanier, J.; Blanchard, C.; Bryson, S.; Harvill, Y. A Hand Gesture Interface Device. SIGCHI Bull. 1986, 17, 189–192. [Google Scholar] [CrossRef]
- Kessler, G.; Walker, N.; Hodges, L. Evaluation of the CyberGlove(TM) as a Whole Hand Input Device. ACM Trans. Comput. Hum. Interact. 1995, 2. [Google Scholar] [CrossRef]
- Temoche, P.; Ramirez, E.; Rodríguez, O. A Low-cost Data Glove for Virtual Reality. 2012. pp. TCG 31–36. Available online: http://citeseerx.ist.psu.edu/viewdoc/download?rep=rep1&type=pdf&doi=10.1.1.226.1554 (accessed on 31 March 2021).
- Kortier, H.; Schepers, M.; Sluiter, V.; Veltink, P.; Leardini, A.; Stagni, R. Ambulatory assesment of hand kinematics: Using an instrumented glove. In Computer Standards & Interfaces—CSI; Universita di Bologna: Bologna, Italy, 2012. [Google Scholar]
- Hammer, J.H.; Beyerer, J. Robust Hand Tracking in Realtime Using a Single Head-Mounted RGB Camera. In Human-Computer Interaction. Interaction Modalities and Techniques; Kurosu, M., Ed.; Springer: Berlin/Heidelberg, Germany, 2013; pp. 252–261. [Google Scholar]
- Bachmann, D.; Weichert, F.; Rinkenauer, G. Evaluation of the Leap Motion Controller as a New Contact-Free Pointing Device. Sensors 2014, 15, 214–233. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Weichert, F.; Bachmann, D.; Rudak, B.; Fisseler, D. Analysis of the Accuracy and Robustness of the Leap Motion Controller. Sensors 2013, 13, 6380–6393. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Bauer, P.; Lienhart, W.; Jost, S. Accuracy Investigation of the Pose Determination of a VR System. Sensors 2021, 21, 1622. [Google Scholar] [CrossRef] [PubMed]
- Borges, M.; Symington, A.; Coltin, B.; Smith, T.; Ventura, R. HTC Vive: Analysis and Accuracy Improvement. In Proceedings of the 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Madrid, Spain, 1–5 October 2018; pp. 2610–2615. [Google Scholar] [CrossRef]
- Passos, D.; Jung, B. Measuring the Accuracy of Inside-Out Tracking in XR Devices Using a High-Precision Robotic Arm. In Proceedings of the HCI International 2020—Posters, Copenhagen, Denmark, 19–24 July 2020; pp. 19–26. [Google Scholar] [CrossRef]
- Shapiro, S.S.; Wilk, M.B. An Analysis of Variance Test for Normality (Complete Samples). Biometrika 1965, 52, 591–611. [Google Scholar] [CrossRef]
- Ostertagova, E.; Ostertag, O. Methodology and Application of One-way ANOVA. Am. J. Mech. Eng. 2013, 1, 256–261. [Google Scholar] [CrossRef]
- Levene, H. Robust Tests for Equality of Variance. In Contributions to Probability and Statistics; Stanford University Press: Palo Alto, CA, USA, 1960; Volume 2, pp. 278–292. [Google Scholar]
- Welch, B.L. The generalisation of student’s problems when several different population variances are involved. Biometrika 1947, 34, 28–35. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| (i) Method | (j) Method | (Mean Diff. (i–j) | std. Error | Sig. | 95% CI | |
|---|---|---|---|---|---|---|
| Lower Bound | Upper Bound | |||||
| fixed-point | marker | 7.60789 | 2.49586 | 0.02 | 0.9291 | 14.2867 |
| one hand | 8.41017 | 2.68948 | 0.016 | 1.2433 | 15.5770 | |
| two hands | 18.44063 | 2.16391 | <0.001 | 12.5353 | 24.3460 | |
| marker | fixed-point | −7.60789 | 2.49586 | 0.02 | −14.2867 | −0.9291 |
| one hand | 0.80227 | 2.20473 | 0.983 | −5.0771 | 6.6817 | |
| two hands | 10.83273 | 1.51988 | <0.001 | 6.7132 | 14.9523 | |
| one hand | fixed-point | −8.41017 | 2.68948 | 0.016 | −15.5770 | −1.2433 |
| marker | −0.80227 | 2.20473 | 0.983 | −6.6817 | 5.0771 | |
| two hands | 10.03046 | 1.82044 | <0.001 | 5.0816 | 14.9793 | |
| two hands | fixed-point | −18.44063 | 2.16391 | <0.001 | −24.3460 | −12.5353 |
| marker | −10.83273 | 1.51988 | <0.001 | −14.9523 | −6.7132 | |
| one hand | −10.03046 | 1.82044 | <0.001 | −14.9793 | −5.0816 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Reimer, D.; Podkosova, I.; Scherzer, D.; Kaufmann, H. Colocation for SLAM-Tracked VR Headsets with Hand Tracking. Computers 2021, 10, 58. https://doi.org/10.3390/computers10050058
Reimer D, Podkosova I, Scherzer D, Kaufmann H. Colocation for SLAM-Tracked VR Headsets with Hand Tracking. Computers. 2021; 10(5):58. https://doi.org/10.3390/computers10050058
Chicago/Turabian StyleReimer, Dennis, Iana Podkosova, Daniel Scherzer, and Hannes Kaufmann. 2021. "Colocation for SLAM-Tracked VR Headsets with Hand Tracking" Computers 10, no. 5: 58. https://doi.org/10.3390/computers10050058
APA StyleReimer, D., Podkosova, I., Scherzer, D., & Kaufmann, H. (2021). Colocation for SLAM-Tracked VR Headsets with Hand Tracking. Computers, 10(5), 58. https://doi.org/10.3390/computers10050058